Результат интеллектуальной деятельности: СООСНАЯ НЕСУЩАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к авиационной технике, в частности к несущей системе вертолета с расположенными соосно двумя несущими винтами противоположного вращения.
Известна соосная несущая система, содержащая редуктор, на валах которого установлены шарнирного типа втулки несущих винтов противоположного вращения, два неподвижных в осевом направлении автомата перекоса, кинематически связанных поводками через двуплечие качалки, смонтированные соответственно на верхней и нижней ползушках, которые установлены на полом вале верхнего несущего винта и соединены посредством пальцев, проходящих через сквозные прорези вала, с тягами, расположенными в полости вышеуказанного вала и выполнены подвижными в осевом направлении посредством многозаходного резьбового механизма общего и дифференциального шага (МОДШ), смонтированного на нижней части корпуса редуктора (см. «Вертолет Ка-26», стр. 107-111, Москва, изд. «Транспорт», 1982 г.).
Большое количество кинематических звеньев с подшипниками в цепи управления несущими винтами требует высокой точности сборки узлов, наличия большого числа точек смазки, тщательного контроля контровочных соединений, что сказывается на повышенной трудоемкости в эксплуатации и, как следствие, удорожании стоимости летного часа. При этом, наличие сквозных прорезей в вале верхнего несущего винта, необходимых для перемещения ползушек, снижает динамическую прочность вала, и доминирующее значение в этом факторе лежит на сквозной прорези в вале для нижней ползушки. Кроме того, МОДШ, расположенный в нижней части редуктора занимает значительное пространство полезного объема кабины вертолета.
Известна другая конструкция системы управления соосным вертолетом, в которой частично устранены указанные недостатки, в частности отсутствие сквозных прорезей в вале верхнего несущего винта, но осталась неизменной сложность кинематической цепи управления несущими винтами, в частности, введение для управления тягами, расположенными внутри полого вала верхнего несущего винта, дополнительного механизма, выполненного в виде самозаклинивающейся червячной пары, в полости червячного колеса которой вмонтирован резьбовой механизм, а червяк оснащен реверсивным электромеханизмом для его привода. Кроме того, введен дополнительный дифференциальный автомат перекоса, который установлен на выступающей над втулкой верхнего несущего винта части вала (см. патент SU №1826422 А1, МПК В64С 27/54).
Известна соосная несущая система, которая содержит редуктор с двумя валами противоположного вращения, на которых смонтированы втулки несущих винтов, два соединенных тягами между собой и подвижных в осевом направлении автомата перекоса, кинематически связанных с поводками лопастей и суммирующей рычажной системой управления общим и дифференциальным шагом. Втулки несущих винтов выполнены с торсионным креплением лопастей и разнесенными горизонтальными шарнирами в виде шаровых опор. Суммирующая рычажная система включает две пары двуплечих рычагов и ползун. Первая пара рычагов расположена под нижним автоматом перекоса, вторая пара рычагов и ползун - на донной части корпуса редуктора. Один из рычагов каждой пары закреплен к корпусу редуктора, другой шарнирно к нему подвешен. Ползун смонтирован в цилиндрической полости редуктора, продольная ось которой совмещена с осью вала верхнего несущего винта. Подвешенные рычаги каждой пары соединены соответственно с нижним автоматом перекоса и ползуном. Посредством тяг и качалок подвешенные рычаги соединены с управлением дифференциальным шагом, а рычаги, закрепленные к корпусу редуктора, соединены с управлением общим шагом. Управление верхним несущим винтом выполнено посредством двуплечих качалок, смонтированных на валу верхнего несущего винта подвижно вдоль его оси и кинематически связанных с ползуном, верхним автоматом перекоса и поводками лопастей, (см. патент РФ №2412081, МПК В64С 27/32(2006.01)). Указанная соосная несущая система по цели решаемой технической задачи и совокупности отличительных признаков принята за прототип.
Анализ конструктивных решений отличительных признаков этой соосной несущей системы выявил ряд технологических недостатков.
В конструктивно-технологическом плане известная система управления НВ исключает сквозные прорези в нижней части вала, но в то же время ее суммирующая рычажная система, объединенная с ползушкой и нижним автоматом перекоса, перенасыщена шарнирно-сочлененными звеньями с подшипниковыми узлами, смонтированными в передней и нижней части редуктора, занимая объем полезного пространства кабины вертолета.
Кроме того, известная конструкция предполагает установку нижнего автомата перекоса на ползуне посредством карданной подвески, а ползун при этом имеет две качалки продольного и поперечного управления, установленные на его цилиндрической части. Качалки кинематически связаны с проводкой управления продольным и поперечным каналом посредством горизонтально расположенных тяг. При управлении общим шагом, происходит линейное перемещение ползуна с качалками вертикально вдоль вала редуктора. Присоединенные к качалкам концы горизонтальных тяг перемещаются вместе с тягами вверх, приводя в движение проводку продольного и поперечного управления. Таким образом появляется взаимовлияние, общего шага и продольно-поперечным шага, которое отрицательно сказывается на эксплуатационные характеристики при управлении вертолетом.
Следующим недостатком известной конструкции является то, что она предполагает консольную подвеску нижнего автомата перекоса на нижнем ползуне посредством кардана и двух тяг продольного и поперечного управления, расположенных друг относительно друга под углом 90 градусов, что отрицательно сказывается на жесткости конструкции подвески.
Техническая задача, не решенная в известном устройстве, решение которой обеспечивается заявляемым изобретением, заключается в создании сосной несущей системы, в которой исключено размещение суммирующей рычажной системы под редуктором, что обеспечивает комфортное размещение пассажиров в кабине включая место под редуктором, а также исключает взаимовлияние общего и продольно-поперечного шага и исключает потерю жесткости управления в подвеске автомата перекоса.
Технический результат заключается в расширении пространства в кабине для комфортного размещения пассажиров, исключение потери жесткости управления в подвеске автомата перекоса, а также исключает взаимовлияние общего и продольно-поперечного шага, что направлено на снижение нагрузки на пилота, при упрощении техники пилотирования вертолетом.
Технический результат достигается за счет того, что соосная несущая система, дополнительно снабжена суммирующим механизмом циклического шага, который выполнен в виде параллелограмма и объединен с суммирующей рычажной системой управления общим и дифференциальным шагом в посредством поступательного звена на конце которого установлены две качалки - двуплечая и трехплечая, которые в свою очередь связаны посредством кинематической связи с нижним автоматом перекоса, а с другой стороны качалки связаны с продольным и поперечным каналом управления а суммирующая рычажная система управления общим и дифференциальным шагом включает в себя две пары двуплечих качалок первая пара качалок установлена на конструкции вертолета, и соединена между собой шарнирной тягой, и связана с каналом путевого управления, а вторая пара качалок установлена на плечах первой пары, связана между собой шарнирной тягой, с каналом управлениям общим шагом. При этом, кинематическая связь качалок суммирующей системы общего и дифференциального шага с ползуном, а также кинематическая связь суммирующего механизма циклического шага с нижним автоматом перекоса выполнена в виде тяг и качалок.
Применение в несущей системе суммирующего механизма циклического шага, выполненного в виде параллелограмма и объединенного с суммирующей рычажной системой управления общим и дифференциальным шагом посредством поступательного звена, позволило разместить механизм общего и дифференциального шага, объединенного с суммирующим механизмом отдельно от редуктора. А размещение суммирующего механизма отдельно от редуктора позволило выполнить суммирующий механизм в виде параллелограмма, и тем самым исключить взаимовлияние общего шага на дифференциальный. Кроме того, размещение суммирующей системы механизма общего и дифференциального шага вне зоны полезного объема кабины вертолета позволяет полноценно использовать этот объем для пассажиров.
Изобретение поясняется чертежами, где:
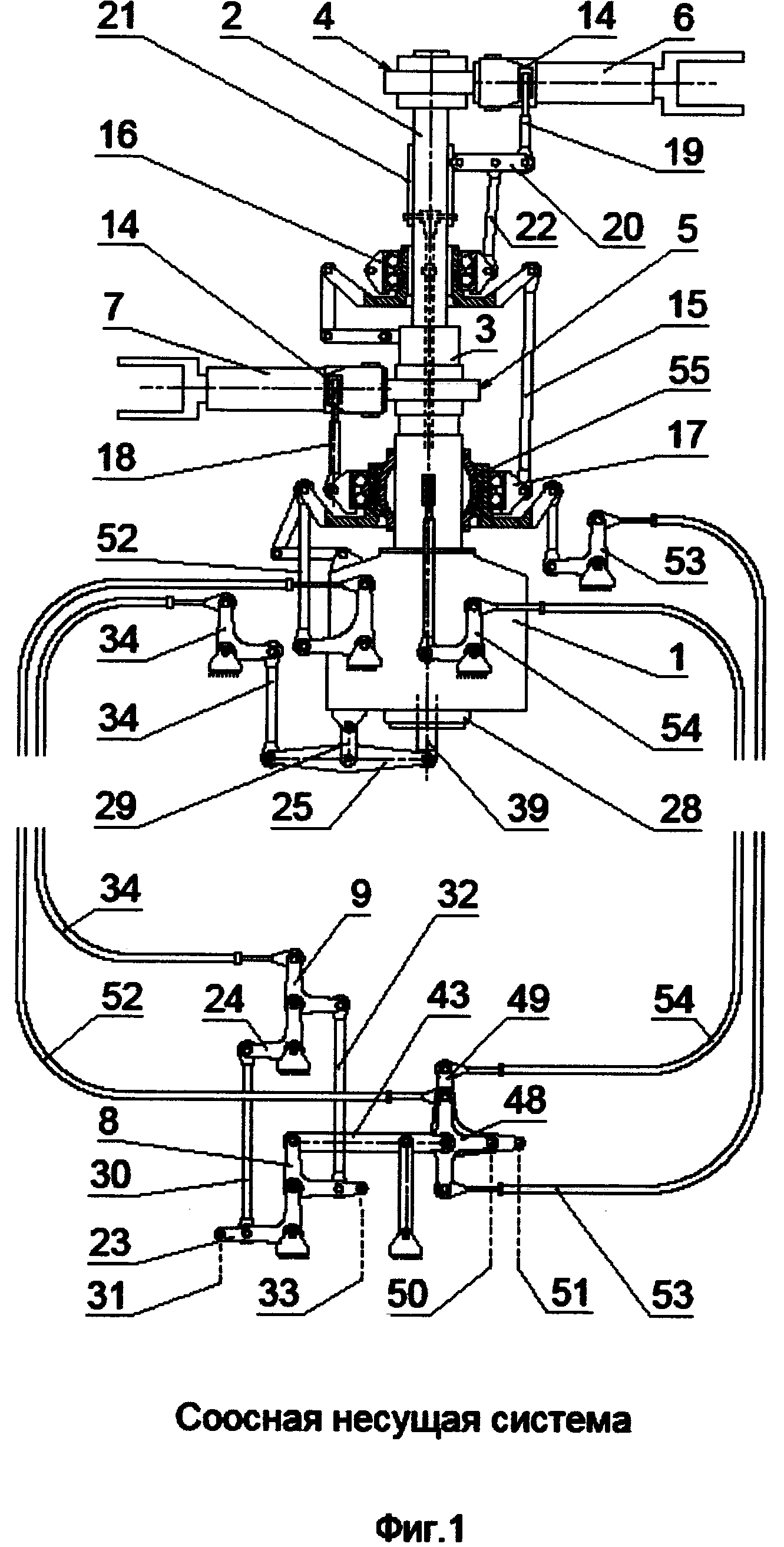
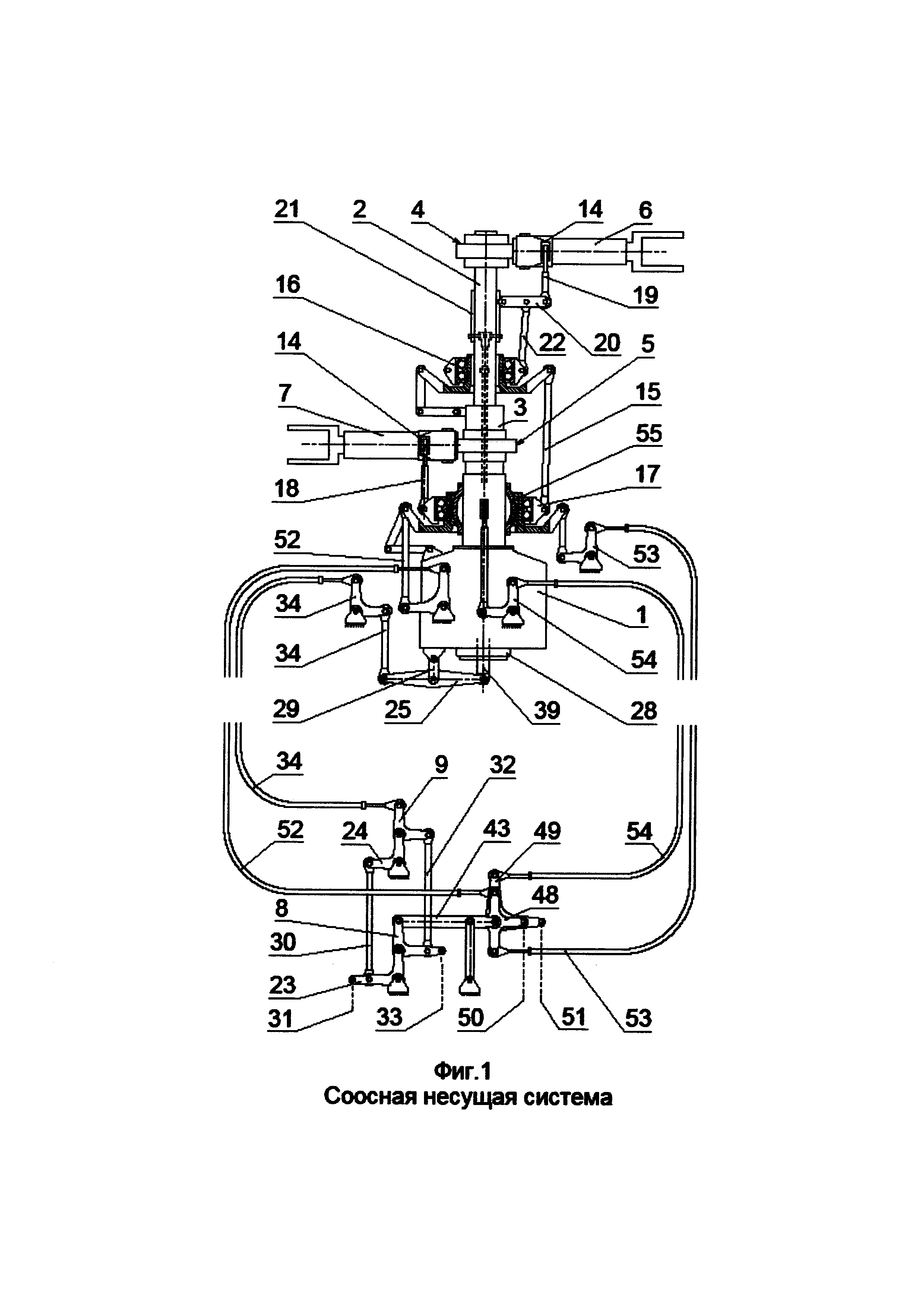
- на фиг. 1 изображена предлагаемая соосная несущая система;
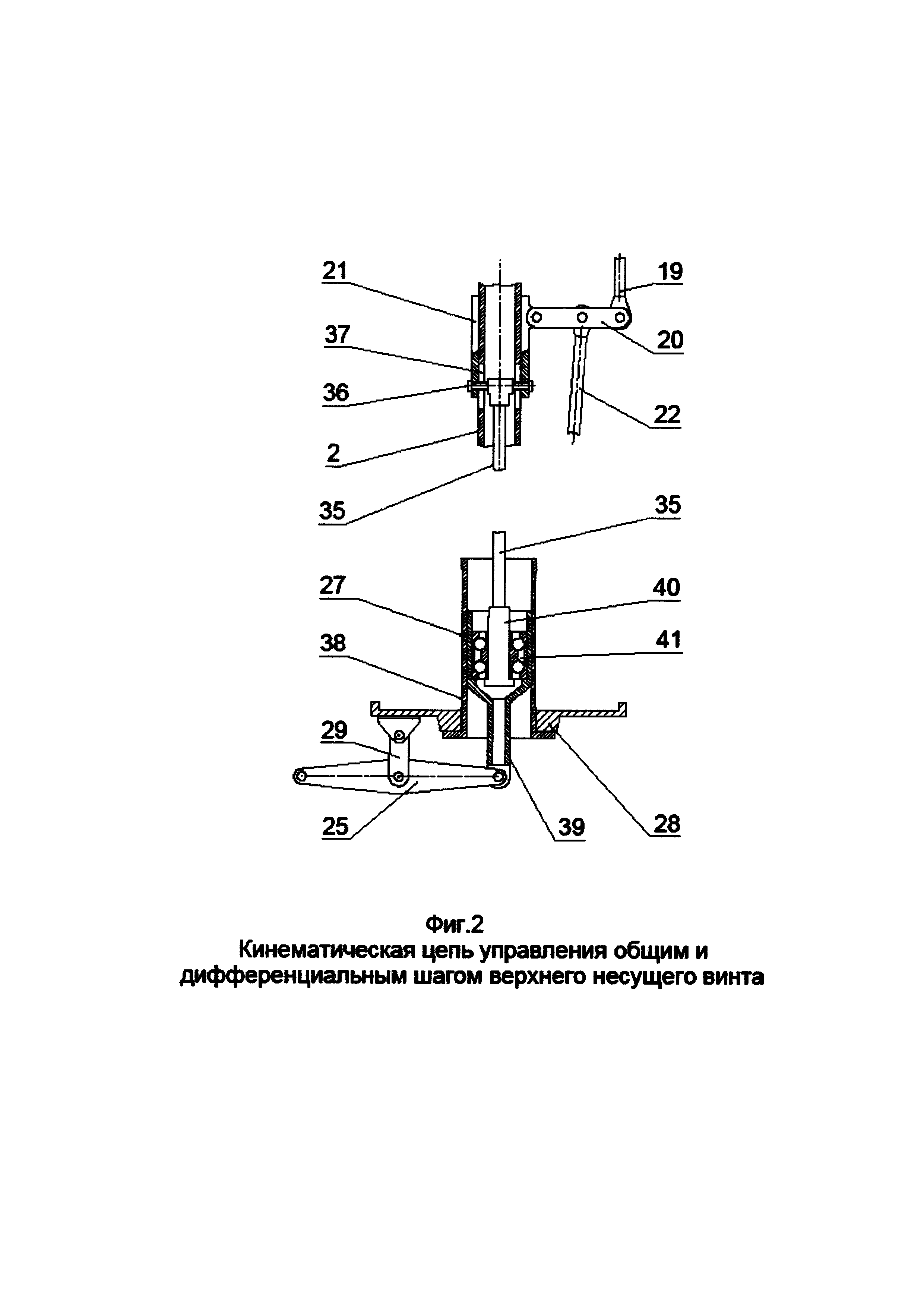
- на фиг. 2 кинематическая цепь управления общим и дифференциальным шагом верхнего несущего винта;
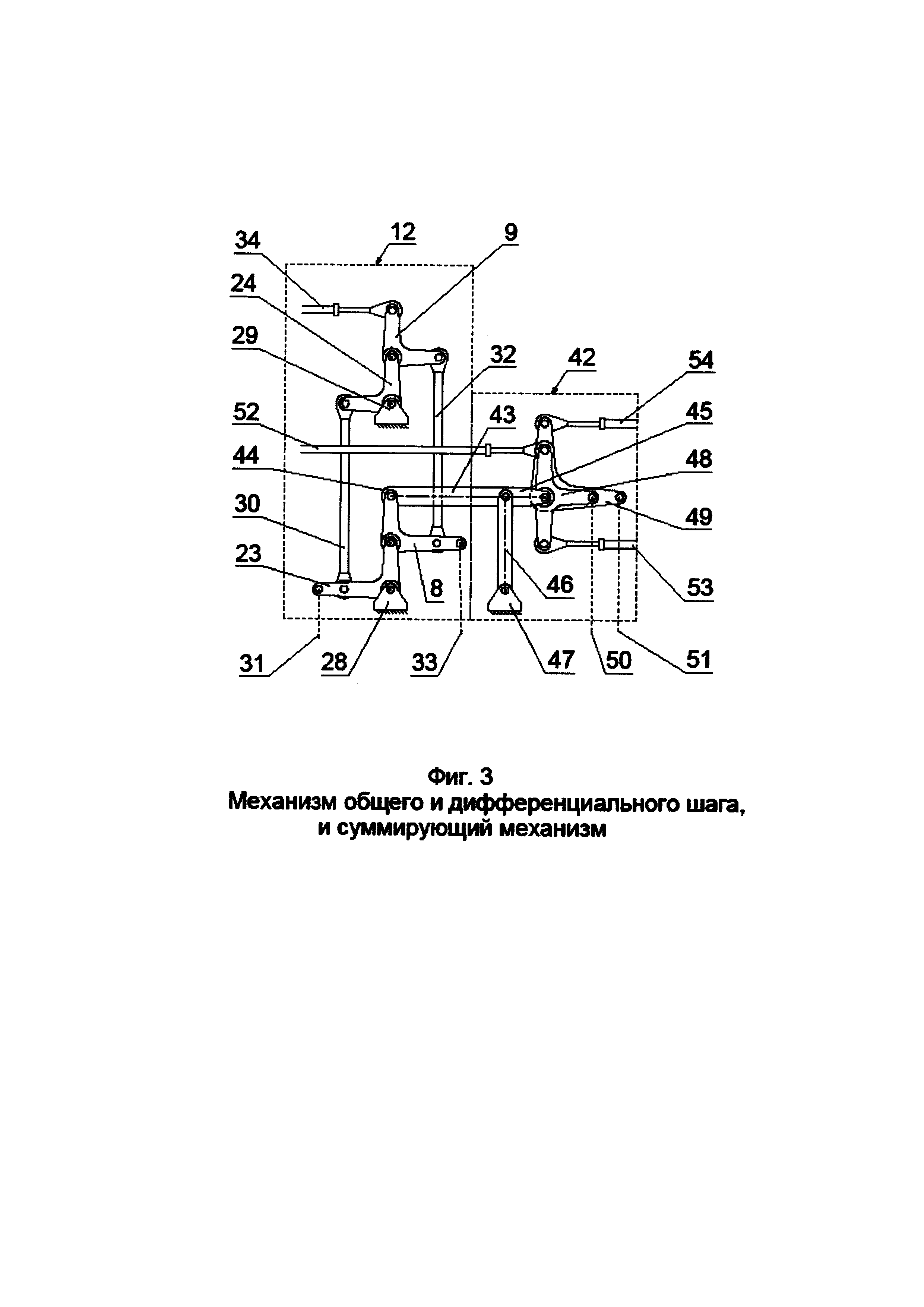
- на фиг. 3 механизм общего и дифференциального шага, и суммирующий механизм;
Соосная несущая система состоит из редуктора 1 с двумя, концентрично расположенными валами 2 и 3 противоположного вращения. На валу 2 смонтирован верхний несущий винт 4, на валу 3 - нижний несущий винт 5. Втулки 6, 7 соответственно каждого из винтов закреплены на валах 2, 3.
Система управления несущими винтами 4, 5 содержит два соединенных между собой тягами 15 и подвижных в осевом направлении автомата перекоса 16 и 17. При этом нижний автомат перекоса 17 подвешен на трех точках каналов проводки управления 52, 53, 54 и сферической опоре 55. Поводки 14 лопастей нижнего несущего винта 5 соединены тягами 18 непосредственно с нижним автоматом перекоса 17, а поводки 14 лопастей верхнего несущего винта 4 соединены тягами 19 с двуплечими качалками 20, смонтированными посредством узла 21 на валу 2 подвижно вдоль его оси, и через них тягами 22 соединены с верхним автоматом перекоса 16.
Система управления общим и дифференциальным шагом несущих винтов 4, 5 выполнена в виде дифференциальной суммирующей системы общего и дифференциального шага 12, которая состоит из двух пар двуплечих качалок 23, 24 - первая пара, 8, 9 - вторая пара. Первая пара качалок установлена на двух кронштейнах 28, 29 и связана между собой тягой 30, которая в свою очередь соединена с каналом путевого управления 31. Вторая пара качалок 8,9 установлена на концах плеч первой пары и соединена между собой тягой 32. При этом, одна качалка второй пары 8 соединена с каналом общего шага 33, а вторая качалка 9, посредством кинематической связи 34 с цепью управления дифференциальным шагом верхнего несущего винта 4.
Цепь управления дифференциальным шагом верхнего несущего винта 4 выполнена посредством кинематической связи рычага 25 с ползуном 27 и далее тягой 35, расположенной в полости вала 2, с двуплечими качалками 20, посредством пальцевого сочленения 36, проходящего через сквозную прорезь 37 вала 2. Рычаг 25 подвешен на поворотном звене 29.
Ползун 27 выполнен в виде полого цилиндрической формы стакана 38, который жестко закреплен в донной части 28 корпуса редуктора 1. В полости стакана 38 расположен полый шток 39 с сердечником 40, сочлененными между собой подшипниковым узлом качения 41, обеспечивающего сердечнику 40 вращательное движение. А сам шток 39 шарнирно соединен с подвешенным рычагом 25, обеспечивающим штоку 39 осевую поступательную подвижность, для чего на внутреннюю поверхность стакана 38 нанесено антифрикционное покрытие (условно не показано).
Система управления в продольно-поперечном канале представляет собой суммирующий механизм 42, который выполнен в виде параллелограмма, с поступательным звеном 43, установленным одним концом 44 на плече качалки 9, а вторым концом 45 на поворотном звене 46, которое установлено на кронштейне 47. На конце поступательного звена 45, подвешены две качалки 48, 49 одна из которых двуплечая 48 связанна с продольным каналом управления 50 и трехплечая 49, соединенная с поперечным каналом управления 51. Обе качалки 48, 49 свободными концами связаны с точками подвески нижнего автомата перекоса 17 посредством трех каналов проводки управления 52, 53, 54, которые выполнены в виде тяг и качалок.
Суммирующая система общего и дифференциального шага 12 объединена с суммирующим механизмом 42 и установлена отдельно от редуктора 1 вне зоны полезного объема кабины вертолета.
Управление вертолетом с предложенной соосной несущей системой в продольно-поперечном направлении полета за счет управления циклическим шагом несущих винтов, по курсу - за счет управления дифференциальным шагом несущих винтов и на вертикальных режимах полета, включая взлет и посадку, - за счет управления общим шагом несущих винтов осуществляется следующим образом.
Управление циклическим шагом несущих винтов 4 и 5 осуществляется путем углового перемещения качалок 48,49 и соответственно синхронного наклона автоматов перекоса 16, 17, при этом циклическое изменение углов установки лопастей нижнего несущего винта 5 производится тягами 18, кинематически связывающими автомат перекоса 17 с поводками 14 лопастей нижнего винта, а циклическое изменение углов установки лопастей верхнего несущего винта 4 от автомата перекоса 16 производится тягами 22 через двуплечие качалки 20 и далее тягами 19, соединяющими двуплечие качалки 20 с поводками 14 лопастей верхнего несущего винта.
Управление общим шагом несущих винтов 4 и 5 осуществляется угловым перемещением рычагов качалки 8 механизма общего и дифференциального шага 12. Поступательное звено 43 вместе с установленными на его конце качалками 48, 49 посредством его кинематической связи 52, 53, 54 производят осевое перемещение нижнего автомата перекоса 17, который посредством тяг 18 перемещает поводки 14 лопастей нижнего несущего винта, а посредством тяг 15 на эту же величину и в том же направлении перемещает верхний автомат перекоса 16. Качалка 9 посредством кинематической связи 34 отслеживает перемещение поступательного звена 43 и через рычаг 25 и далее по кинематической цепи: «полый шток 39 - сердечник 40 - тяга 35 - узел 21 с пальцевым сочленением 36» производит перемещение двуплечих качалок 20 адекватно перемещению автомата перекоса 16, обеспечивая этим однонаправленное и одинаковое по величине перемещение поводков 14 лопастей на верхнем несущем винте.
Управление дифференциальным шагом лопастей несущих винтов 4 и 5, т.е. увеличение углов установки (шага) лопастей одного из несущих винтов при одновременном уменьшении на ту же величину угла установки лопастей другого несущего винта осуществляется соответствующим угловым перемещением пары качалок 23, 24.
Перемещением качалки 23 производится перемещение качалки 8 а вместе с ней посредством кинематической связи и осевое перемещение автомата перекоса 17 с автоматом перекоса 16, при этом посредством качалки 9, установленной на качалке 24 через кинематическую связь 34 происходит также поворот рычага 25, который по вышеупомянутой кинематической цепи производит осевое перемещение узла 21 со смонтированными на нем двуплечими качалками 20. Подбором плеч пар качалок 23, 24 и 8, 9, двуплечих качалок 20 достигается разность скоростей перемещения автоматов перекоса 16, 17 и узла 21 с двуплечими качалками 20, что приводит к разнонаправленному, но одинаковому по величине изменению угла установки лопастей на нижнем и верхнем несущих винтах.
Предлагаемая соосная несущая система управления полетом вертолета несет в себе простоту конструкции системы, за счет «открытой архитектуры» ее кинематической схемы, которая в свою очередь позволяет каждый элемент кинематической цепи выполнить с высокой степенью надежности, что в совокупности обеспечивает безопасность полета вертолета.
Размещение механизма общего и дифференциального шага 12 объединенного с суммирующим механизмом 42 отдельно от редуктора 1 вне зоны полезного объема кабины вертолета позволяет полноценно использовать этот объем для пассажиров. Кроме того, отдельное размещение суммирующего механизма 42 позволило конструктивно выполнить его в виде параллелограмма, что позволило исключить взаимовлияние общего с продольно-поперечным шагом и тем самым упростить технику пилотирования.
Опора для установки главного редуктора с несущим винтом
Способ аварийного спасения летчика
Энергопоглощающее кресло летательного аппарата

