Результат интеллектуальной деятельности: Способ построения трехмерной модели местности вдоль полотна железнодорожного пути
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики для регистрации профиля железнодорожного пути в целях проведения мониторинга и диагностики участков железнодорожного пути, проектно-изыскательских и других видов работ. Заявленный в изобретении способ позволяет сформировать цифровую модель земной поверхности и расположенных на ней объектов инфраструктуры железнодорожного транспорта вдоль полотна железнодорожного пути посредством совместного проведения аэрофотосъемки и лазерного сканирования местности с помощью летательного аппарата.
Основное применение данного способа рассчитано на оперативный мониторинг участка железнодорожного пути и объектов инфраструктуры железнодорожного транспорта в целях определения негабаритных объектов железнодорожной инфраструктуры, а также для своевременного выявления деформаций балластной призмы и основной площадки земляного полотна. Способ также может применяться для решения других общеизвестных задач по топографии.
Известен способ контроля состояния железнодорожного пути [1], в котором на основе использования базы данных реперной системы и данных с вагона-путеизмерителя или путеизмерительного устройства выправочной машины получают цифровую модель верхнего строения железнодорожного пути. Однако указанный способ не позволяет получить цифровую форму нижнего строения железнодорожного пути, состоящего из земляного полотна и балластной призмы.
Известен также способ формирования цифровой модели местности при помощи модернизированной бортовой системы управления аэрофотосъемкой, используемой для мониторинга сетей газопровода и его инфраструктуры посредством пилотируемых воздушных судов [2]. В состав системы входят два аэрофотоаппарата, оптические оси которых расположены так, чтобы обеспечить одновременное получение изображений двух маршрутов с поперечным перекрытием между собой в 30%. На основе полученных с аэрофотоаппаратов изображений двух маршрутов и данных о трехмерных координатах центров фотографирования, полученных от навигационной системы воздушного судна, осуществляют построение высокоточного ортофотоплана местности в местах пролегания сетей газопровода и его окружения. К недостатку данного способа можно отнести малую площадь на поверхности местности, ограниченную областью взаимного перекрытия полей зрения аэрофотокамер, которая доступна для построения цифровой модели местности. К тому же данный способ предусматривает использование двух аэрофотокамер, что приводит к увеличению габаритов и стоимости системы.
Наиболее близким аналогом заявленного изобретения является способ построения карты экзогенных геологических процессов, протекающих на местности вдоль трассы пролегания магистрального нефтепровода [3]. В указанном способе по данным цифровой аэрофотосъемки и воздушного лазерного сканирования местности вдоль трассы магистрального нефтепровода с борта воздушного судна, а также по данным от наземной навигационной системы, формируют цифровую модель рельефа и карту уклонов местности.
Недостатком существующего технического решения является возрастание погрешности определения координат пилотажно-навигационного комплекса системы по мере его удаления от места расположения наземных станций ГНСС.
Задачей изобретения является повышение точности координатных измерений точек на поверхности полотна железнодорожного пути и прилегающей местности. Техническим результатом изобретения является цифровая модель местности и объектов инфраструктуры железнодорожного транспорта вдоль полотна железнодорожного пути, обладающая более высокими точностными характеристиками и обеспечивающая возможность проведения диагностики нижнего строения железнодорожного пути для выявления опасных деформаций основной площадки земляного полотна и балластной призмы железной дороги.
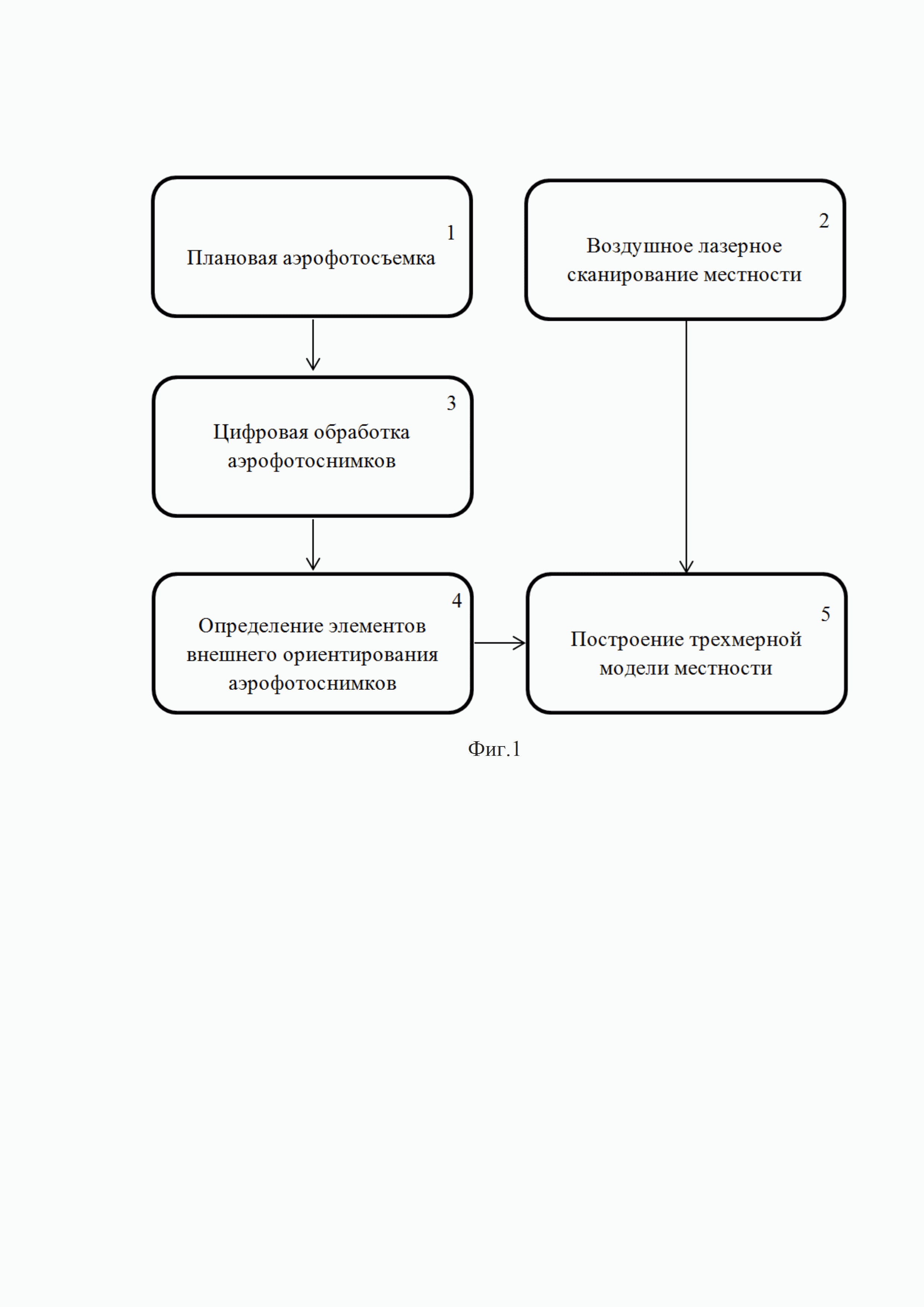
Указанная задача решается, а технический результат достигается благодаря тому, что в способе построения трехмерной модели местности вдоль полотна железнодорожного пути проводят одновременно плановую аэрофотосъемку и воздушное лазерное сканирование местности с применением летательного аппарата (ЛА) для получения цифровых аэрофотоснимков (АФС) и массива точек лазерных отражений местности вдоль полотна железнодорожного пути, при этом полученные АФС разбивают по парам, подлежащих взаимному ориентированию, с образованием стереопар, распознают на них рельсовую колею и определяют расстояния между рельсовыми нитями, по которым вычисляют масштаб изображения местности на АФС, после этого путем наложения цифровых маркеров на АФС каждой стереопары выполняют взаимное ориентирование АФС с определением элементов их внешнего ориентирования, которые используют для коррекции значений трехмерных координат массива точек лазерных отражений местности и определения координат этих точек на цифровых АФС, по скорректированным значениям трехмерных координат точек на местности, значениям двухмерных координат этих точек на АФС, а также значениям масштаба изображений местности на АФС формируют трехмерную модель местности.
Сущность изобретения поясняется чертежами, на которых:
фиг. 1 – блок-схема способа формирования трехмерной модели местности вдоль полотна железнодорожного пути;
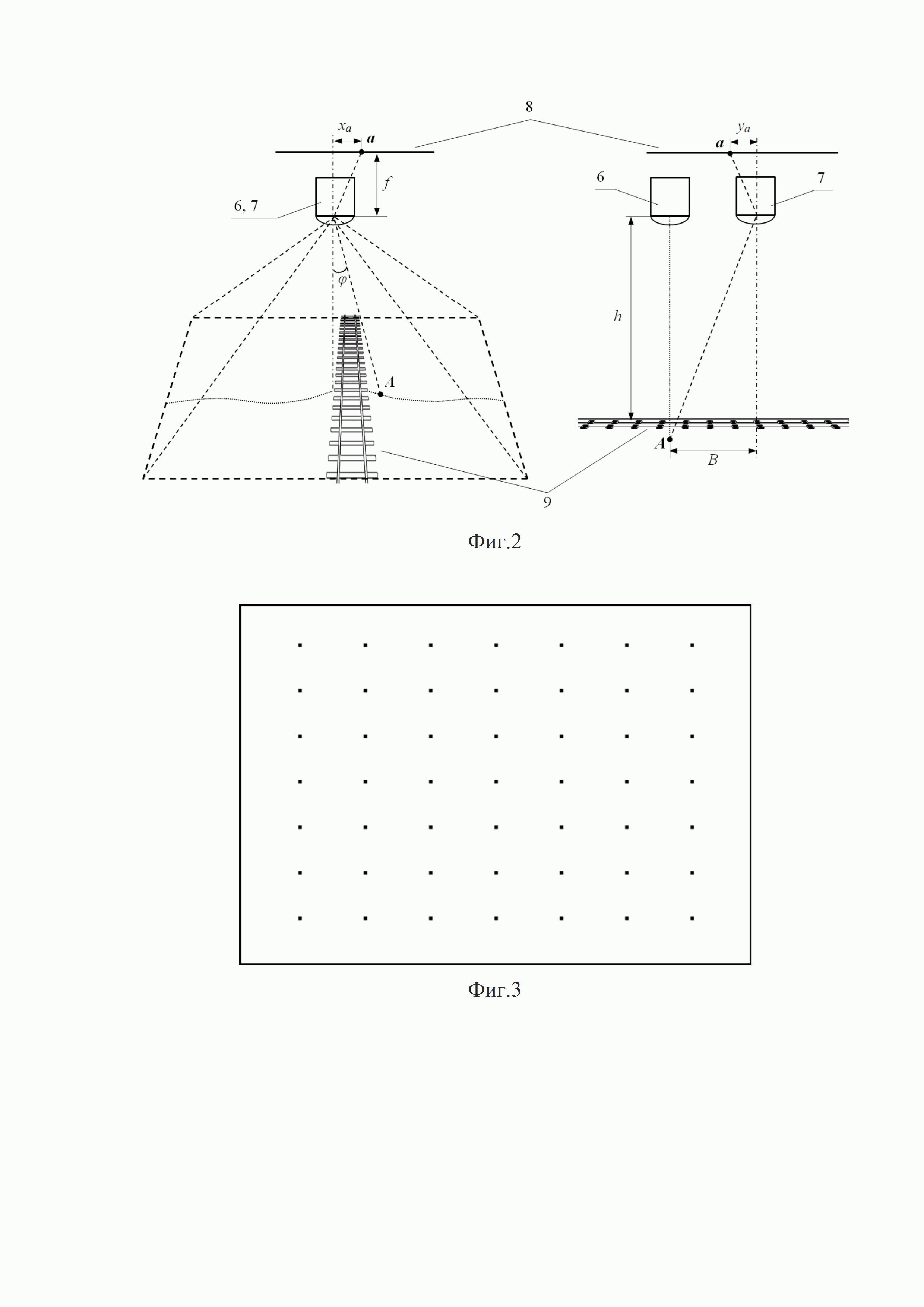
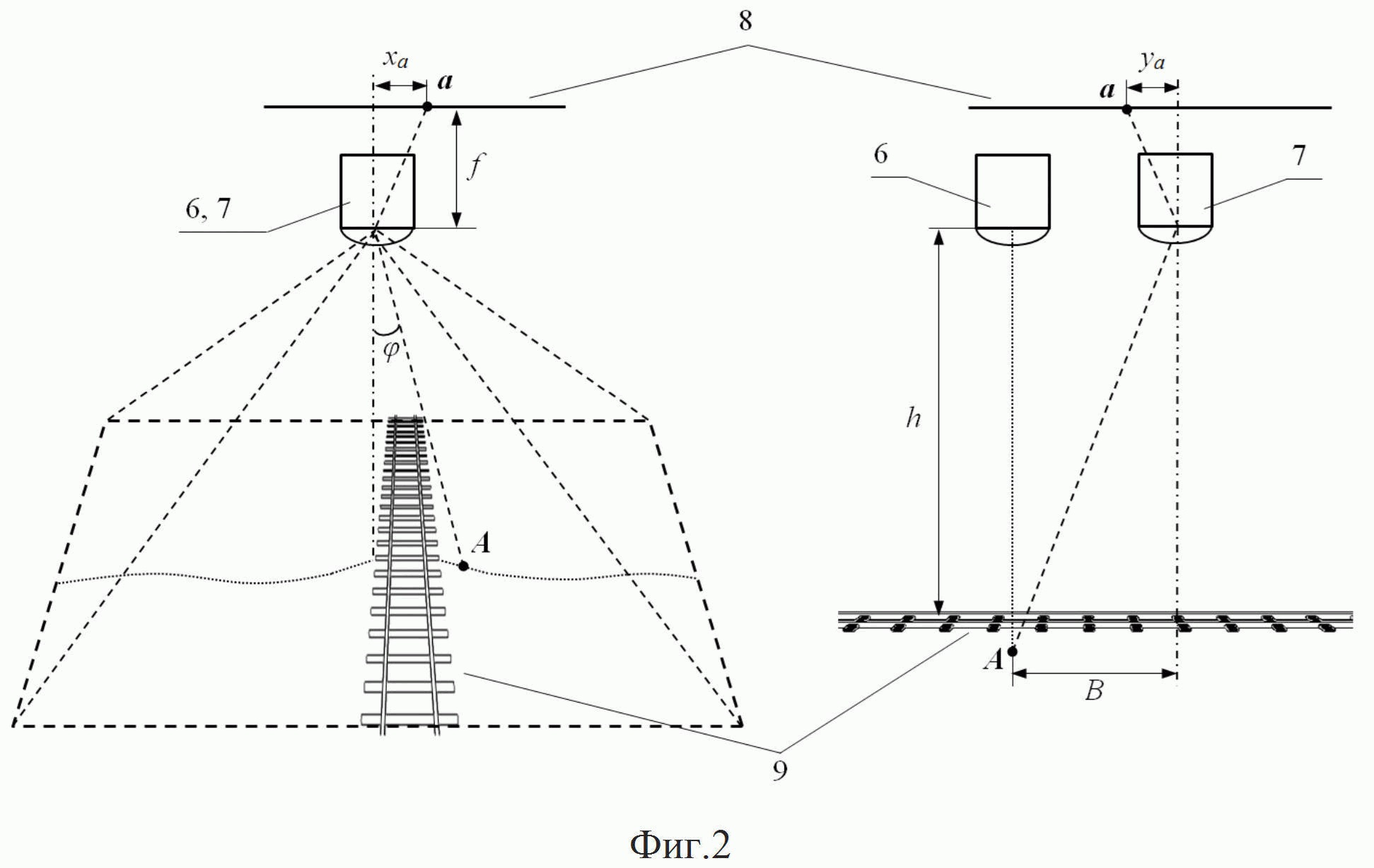
фиг. 2 – принципиальная схема определения координат точек на местности вдоль полотна железнодорожного пути;
фиг. 3 – комбинация цифровых маркеров в виде прямоугольной матрицы на изображении;
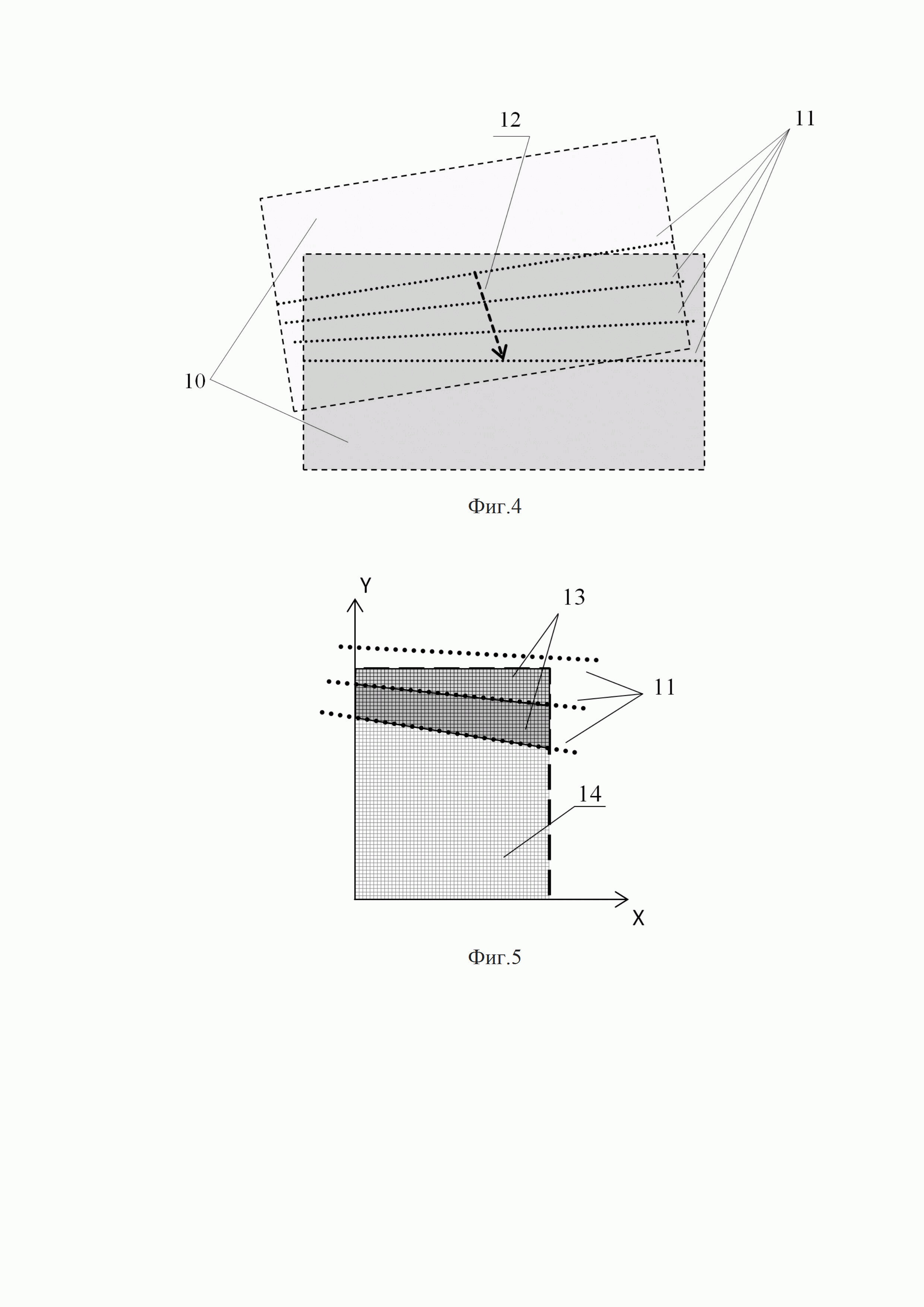
фиг. 4 – принципиальная схема лазерного сканирования местности в процессе аэрофотосъемки;
фиг. 5 – принципиальная схема интерполяции координат точек полученных по результатам лазерного сканирования местности;
фиг. 6 – трехмерная модель местности вдоль полотна железнодорожного пути сформированная по результатам проведения аэрофотосъемки и лазерного сканирования местности.
Заявленный способ построения трехмерной модели местности вдоль полотна железнодорожного пути осуществляют следующим образом.
Для построения трехмерной модели местности 5 с требуемым разрешением вдоль рельсовой колеи 9 проводят плановую аэрофотосъемку 1 на определенной высоте, учитывая технические характеристики используемой аэрофотокамеры 6 (АФК) и воздушного лазерного сканера 7 (ВЛС). Изображение в АФК формируется путем проецирования участка местности 10, попадающего в поле ее зрения на плоскость снимка аэрофотокамеры 8.
АФК и ВЛС крепятся к гиростабилизирующей установке, вдоль линии, определяющей направление полета ЛА. АФК устанавливают на ЛА для проведения плановой аэрофотосъемки таким образом, чтобы ее главная оптическая ось приняла вертикальное положение.
В процессе проведения аэрофотосъемки 1 соблюдают требуемое взаимное перекрытие между каждыми двумя последовательно сделанными АФС. Несоблюдение значений перекрытий может привести к разрывам в формируемой трехмерной модели местности. Перекрытие обеспечивается подбором соответствующей скорости полета ЛА на заданной высоте и частоты фотографирования. Это позволяет скомпенсировать возможное воздействие порывов ветра на ЛА и особенности рельефа местности, а также решить фотограмметрические задачи, связанные с выполнением взаимного ориентирования и определением элементов их внешнего ориентирования 4.
Цифровая обработка аэрофотоснимков 3 осуществляется следующим образом.
На изображении АФС выделяется множество пикселей  , принадлежащих рельсовым нитям, цветовые компоненты, которого
, принадлежащих рельсовым нитям, цветовые компоненты, которого  ограничены минимальными и максимальными значениями в занимаемой части пространства RGB:
ограничены минимальными и максимальными значениями в занимаемой части пространства RGB:
 (1)
(1)
Учитывая однородность цвета рельсовых нитей, в качестве средних значений компонентов цвета принимаются медианы:
 (2)
(2)
Граничные значения компонентов цвета, определяющие диапазон изменения цвета рельсовых нитей, могут варьировать в широких пределах в зависимости от конкретных условий проведения аэрофотосъемки: уровень освещенности, ракурс и высота аэрофотосъемки.
Поскольку в формировании цвета участвуют три компоненты цвета, вводится функция, определяющая дисперсию компонентов цвета пикселя на изображении АФС относительно средних значений компонентов цвета рельсовых нитей:
 (3)
(3)
Установив для функции некоторое пороговое значение k, характеризующее допустимое отклонение значений компонентов цвета рельсовых нитей от среднего, можно обнаружить их на изображении, применив следующее условие:
 (4)
(4)
Минимальные значения, которые принимает функция  в каждой строке y на изображении, указывают на наличие рельсовых нитей. Аппроксимируя множество пикселей H по известным в математике формулам, определяется расстояние q между рельсовыми нитями на изображении. Затем вычисляется коэффициент масштабирования изображения местности на АФС для приведения его к единому масштабу:
в каждой строке y на изображении, указывают на наличие рельсовых нитей. Аппроксимируя множество пикселей H по известным в математике формулам, определяется расстояние q между рельсовыми нитями на изображении. Затем вычисляется коэффициент масштабирования изображения местности на АФС для приведения его к единому масштабу:
 , (5)
, (5)
где h – требуемая высота аэрофотосъемки;
q – расстояние между рельсовыми нитями на изображении в пикселях;
Q – нормированное расстояние между рельсовыми нитями;
pix – физический размер пикселя на изображении.
Далее изображения на АФС масштабируется по известному в математике методу билинейной интерполяции.
После масштабирования все АФС разбиваются на стереопары, образованные двумя последовательно сделанными АФС с требуемым перекрытием, которые затем взаимно ориентируются. Для этого изображения стереопары, длиной Nx и шириной Ny пикселей, представляется в виде множества пикселей:
 , (6)
, (6)
где (х, у) – координаты пикселя на изображении;
 – произвольный вектор в цветовом пространстве RGB, состоящий из трех компонентов цвета
– произвольный вектор в цветовом пространстве RGB, состоящий из трех компонентов цвета  , которые также могут быть представлены в виде множеств натуральных чисел, определяющих 256 градаций цвета:
, которые также могут быть представлены в виде множеств натуральных чисел, определяющих 256 градаций цвета:
 , (7)
, (7)
где  .
.
На изображение накладывается комбинация маркеров, равномерно распределенных по кадру в форме прямоугольной матрицы с шагом кратным длине и ширине изображения:
 , (8)
, (8)
где  – кратность размеру изображения.
– кратность размеру изображения.
Таким образом, в каждой строке и столбце прямоугольной матрицы будет содержаться  маркеров. Тогда векторную функцию суммарных значений компонентов цвета по области, ограничивающей множество пикселей, обозначенных маркерами на первом изображении, можно задать выражением:
маркеров. Тогда векторную функцию суммарных значений компонентов цвета по области, ограничивающей множество пикселей, обозначенных маркерами на первом изображении, можно задать выражением:
 , (9)
, (9)
где  – позиция маркера в строке и столбце прямоугольной матрицы, соответственно.
– позиция маркера в строке и столбце прямоугольной матрицы, соответственно.
Для каждой области изображения, на которую попадает маркер, рассчитывается векторная функция, определяющая суммарные значения компонентов цвета по области. На втором изображении задается смещение (∆х, ∆y) и определяется расстояние по осям X и Y от каждого из маркеров до центра изображения:
 (10)
(10)
Задав угол поворота ∆ψ изображений, относительно друг друга, на втором изображении определяют суммарные значения множества пикселей по окрестностям, обозначенных маркерами:
 , (11)
, (11)
где X, Y вычисляются из выражений:
 (12)
(12)
В зависимости от величины смещения маркеров и угла поворота одного изображения относительно другого, определяются значения целевой функции, выраженные через сумму квадратов отклонений в значениях векторных функций:
 (13)
(13)
Относительная величина смещения и угол поворота определяются значениями аргументов целевой функции, при которых она принимает минимальное значение, не превышающее установленного порогового коэффициента. По аргументам функции  определяют перемещение точки съемки 12 за период времени между моментами фотографирования
определяют перемещение точки съемки 12 за период времени между моментами фотографирования  , используя следующее выражение:
, используя следующее выражение:
 , (14)
, (14)
где q1,q2 – расстояния между рельсовыми нитями на изображениях стереопары.
По сумме этих перемещений определяют элементы внешнего ориентирования аэрофотоснимков 4 – координаты точки съемки и угол поворота снимка в трехмерной декартовой системе координат модели местности. За начало координат принимаются координаты первой точки съемки на заданной высоте h. Координаты последующих точек съемки , полученных в следующей последовательности
, полученных в следующей последовательности  , вычисляются из выражения:
, вычисляются из выражения:
 (15)
(15)
Угол поворота j-го АФС в системе координат модели местности определяется из выражения:
 (16)
(16)
Затем, по данным воздушного лазерного сканирования местности 2, определяются координаты зафиксированных точек на местности в прямоугольной трехмерной системе координат, создаваемой модели. Это осуществляется следующим образом.
Подсистема развертки ВЛС формирует лазерные лучи с постоянным угловым шагом dφ. Линия развертки 11 образуется множеством лучей, количество n из которых окажется в поле зрения объектива АФК 10. Угловое положение ВЛС задается так, чтобы его центральный лазерный луч был направлен параллельно главной оптической оси АФК, а линия развертки ВЛС была перпендикулярна направлению полета ЛА. Тогда угол наклона лазерного луча i, фиксирующего некоторую точку A на местности, можно найти из выражения:
 (17)
(17)
Положение этой точки в системе координат АФК определяются выражениями:
 (18)
(18)
где la – расстояние до точки A , измеренное ВЛС.
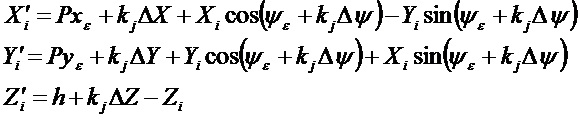
Для преобразования координат точки A, зафиксированной из точки съемки  , в систему координат трехмерной модели местности используются следующие выражения:
, в систему координат трехмерной модели местности используются следующие выражения:
 (19)
(19)
При построении модели местности необходимо учитывать, что в процессе проведения аэрофотосъемки ЛА отклоняется от заданной траектории полета. Также необходимо учитывать, что ВЛС выполняет сканирование местности с некоторой задержкой, характеризующейся частотой формирования линий развертки. Если частота фотографирования АФК меньше частоты формирования линий развертки, то за время получения двух снимков формируется некоторое множество линий развертки. Чтобы в формируемой трехмерной модели местности не возникало разрывов необходимо выполнить интерполяцию по области сканирования. Для этого частота фотографирования АФК подбирается так, чтобы отношение частоты сканирования ВЛС к частоте фотографирования выражалось натуральным числом:
 , (20)
, (20)
При этом момент фотографирования должен быть синхронизирован по времени с формированием линии развертки. Коэффициент для расчета положения ЛА в момент формирования линии развертки  относительно его положения в момент времени фотографирования
относительно его положения в момент времени фотографирования  определяется выражением:
определяется выражением:
 (21)
(21)
Тогда выражения (19) для определения координат точек в промежуточных линиях развертки, сформированных ВЛС за интервал времени между моментами фотографирования , примут следующий вид:
 (22)
(22)
Линии развертки ВЛС помещаются в декартовую систему координат съемочного участка. После этого на них накладывается координатная сетка. Размер ячеек сетки задается исходя из требуемого разрешения формируемой модели. В результате пересечений линий развертки ВЛС с вертикальными прямыми, проходящими через крайние точки в этих линиях, образуются замкнутые области 13 ограниченные съемочным участком 14. Выполняя интерпелляцию по этим областям, образуется облако точек, представляющее собой точечную модель местности. На облако точек, накладываются АФС, полученные в процессе проведения аэрофотосъемки и тем самым формируется трехмерная модель местности вдоль рельсовой колеи.
Источники информации
1. Патент РФ № 2628541, МПК G01C 5/00, на изобретение «Способ контроля состояния железнодорожного пути».
2. Патент РФ № 2646539, МПК G01C11/00, на изобретение «Модернизированная бортовая система управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС)».
3. Патент РФ № 2591875, МПК G01C11/00, на изобретение «Способ построения карты экзогенных геологических процессов местности вдоль трассы магистрального нефтепровода».
Способ построения трехмерной модели местности вдоль полотна железнодорожного пути, отличающийся тем, что проводят одновременно плановую аэрофотосъемку и воздушное лазерное сканирование местности с применением летательного аппарата для получения цифровых аэрофотоснимков (АФС) и массива точек лазерных отражений местности вдоль полотна железнодорожного пути, при этом полученные АФС разбивают по парам, подлежащим взаимному ориентированию, с образованием стереопар, распознают на них рельсовую колею и определяют расстояния между рельсовыми нитями, по которым вычисляют масштаб изображения местности на АФС, после этого путем наложения цифровых маркеров на АФС каждой стереопары выполняют взаимное ориентирование АФС с определением элементов их внешнего ориентирования, которые используют для коррекции значений трехмерных координат массива точек лазерных отражений местности и определения координат этих точек на цифровых АФС, по скорректированным значениям трехмерных координат точек на местности, значениям двухмерных координат этих точек на АФС, а также значениям масштаба изображений местности на АФС формируют трехмерную модель местности.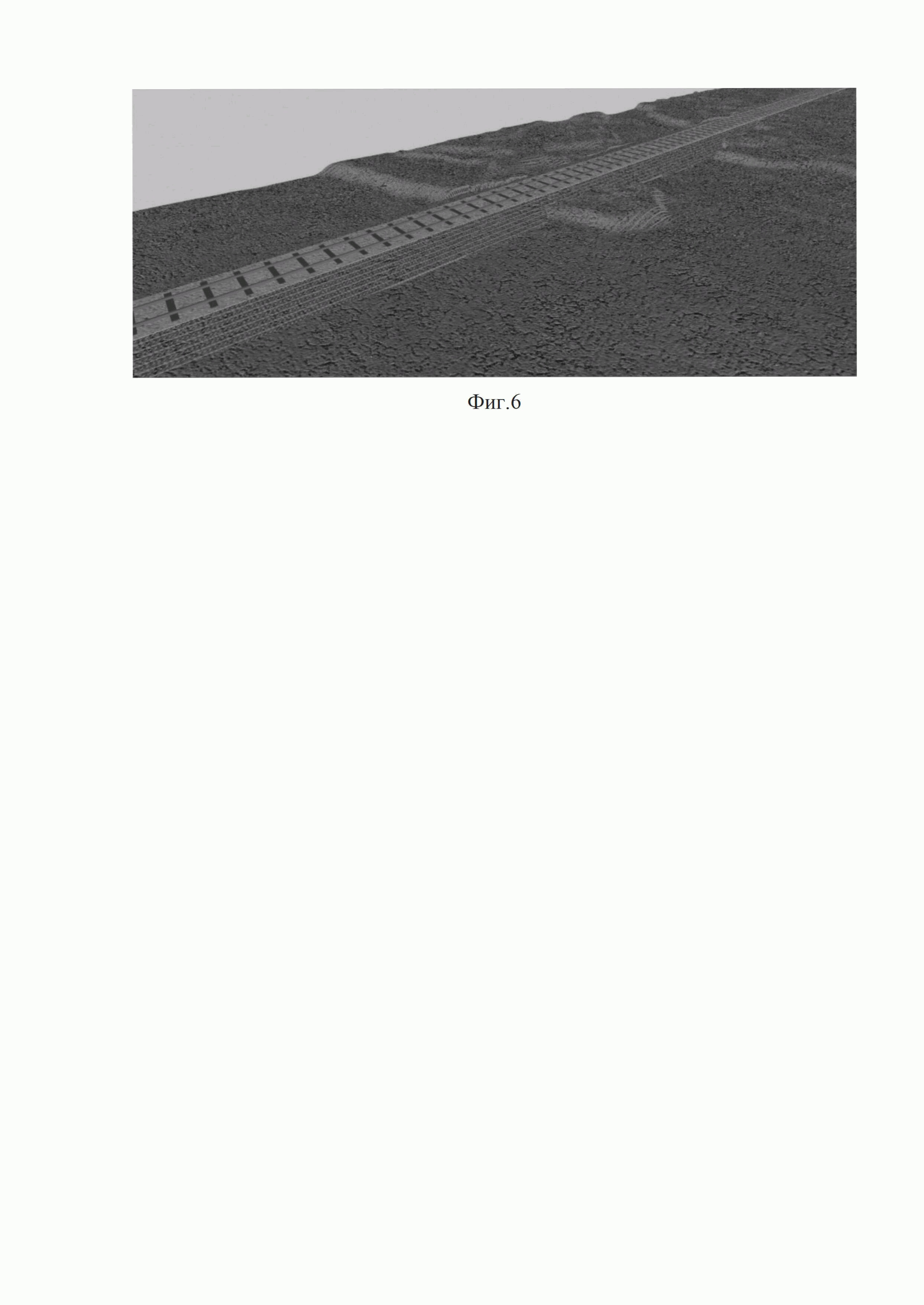
Способ измерения расстояния на цифровой видеокамере с помощью мишени
Фотограмметрический способ измерения расстояний вращением цифрового фотоаппарата
Способ определения параметров геометрии рельсовой колеи и система для его осуществления
Способ измерения расстояния на цифровой видеокамере с помощью мишени
Фотограмметрический способ измерения расстояний вращением цифрового фотоаппарата
Способ определения параметров геометрии рельсовой колеи и система для его осуществления
Измеритель расстояний на цифровой видеокамере
Способ органосохраняющего лечения уротелиального рака лоханки почки
Способ выполнения эндоскопической операции дюкена
Способ дренирования почки после органосохраняющего лечения рака лоханки у больных с единственной или единственно-функционирующей почкой
Способ перкутанного эндоскопического удаления опухолей лоханки единым блоком
Способ органосохраняющего лечения уротелиального рака лоханки почки

