Результат интеллектуальной деятельности: ПРИСПОСОБЛЕНИЯ И МЕТОДЫ ПЛАНИРОВАНИЯ ОРТОДОНТИЧЕСКОГО ЛЕЧЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0000] Настоящее раскрытие предмета изобретения относится к методу автоматизированной разработки ортодонтических кап.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0001] Ортодонтия в целом и выравнивание зубов в частности - хорошо развитая область стоматологической помощи. Традиционные брекеты, а в последнее время и прозрачные ортодонтические капы, предлагают пациентам с неправильным расположением зубов стратегию для улучшения их функционирования и внешнего вида через постепенное движение. Эти градуированные контролируемые движения зубов медленно двигают коронку зуба до достижения желаемого положения.
[0002] Подобные методы лечения, однако, зачастую не принимают во внимание окклюзию или касание верхних и нижних зубов при разработке окончательного положения зубов в зубном ряду, концентрируясь вместо этого на эстетических характеристиках и собственно выравнивании прилежащих зубов при определении идеальных положений коронок. Более того, подобные методы определения окончательного положения зубов в зубном ряду зачастую очень трудоемки и требуют многих часов ручной работы по определению положения каждого зуба и каждого этапа движения зубов.
[0003] Таким образом, автоматизированный метод определения «почти идеальной» зубной дуги, а также каждого промежуточного положения и этапа, необходимых для достижения «почти идеальной» зубной дуги с учетом как выравнивания, так и окклюзии, до сих пор не был разработан.
[0004] Вышеизложенное описание «Предпосылок» дано с целью презентации контекста изобретения. Работа изобретателей, в той мере, в которой она описана в этом разделе, а также аспекты описания, которые могут не быть квалифицированы как предыдущий уровень техники на момент подачи заявки, не признаются предыдущим уровнем техники по сравнению с настоящим изобретением ни явным, ни косвенным образом.
КРАТКОЕ ИЗЛОЖЕНИЕ
[0005] Настоящее изобретение относится к методу, приспособлениям и машиночитаемому носителю, составляющим вычислительную схему, настроенную на выполнение автоматизированного процесса разработки кап для ортодонтического лечения.
[0006] Точнее говоря, настоящее изобретение относится к методу, приспособлениям и машиночитаемому носителю, составляющим вычислительную схему, настроенную на выполнение метода для формирования схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента. В состав этого метода входит извлечение контрольных точек зубов, как минимум, одной зубной дуги пациента из полученных данных пациента, определение на основе извлеченных контрольных точек искомой зубной дуги пациента, а также одного или нескольких этапов движения зубов, и формирование на основе вычисленных этапов движения зубов схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента.
[0007] Вышеизложенный абзац дан в качестве общего введения и не претендует на ограничение объема последующих притязаний формулы изобретения. Для наилучшего понимания описанных реализаций вместе с дополнительными преимуществами следует обратиться к дальнейшему подробному описанию вкупе с сопроводительными иллюстрациями.
КРАТКОЕ ОПИСАНИЕ ИЛЛЮСТРАЦИЙ
[0008] Патент или комплект материалов заявки включает в себя, как минимум, одну цветную иллюстрацию. Копии этого патента или опубликованной патентной заявки с цветными иллюстрациями будут предоставлены офисом по запросу и при оплате необходимого сбора.
[0009] Получить более полное понимание изобретения и множества сопутствующих ему преимуществ можно через рассмотрение последующего подробного описания вкупе с сопроводительными иллюстрациями, где:
[0010] ФИГ. 1 - это иллюстрация ортодонтических кап в соответствии с примером реализации настоящего изобретения;
[0011] ФИГ. 2 - это функциональная диаграмма процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0012] ФИГ. 3 - это иллюстрация, описывающая данные пациента в системе планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0013] ФИГ. 4 - это функциональная диаграмма подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0014] ФИГ. 5A - это функциональная диаграмма подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0015] ФИГ. 5B - это функциональная диаграмма подпроцесса подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0016] ФИГ. 5C - это функциональная диаграмма подпроцесса подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0017] ФИГ. 6 - это иллюстрация двухмерного представления изолиний, определенных подпроцессом процесса системы планирования ортодонтического лечения, в соответствии с примером реализации настоящего изобретения;
[0018] ФИГ. 7A - это иллюстрация идентификации анатомической особенности зуба в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0019] ФИГ. 7B - это иллюстрация идентификации анатомической особенности зуба в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0020] ФИГ. 7C - это иллюстрация идентификации анатомической особенности зуба в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0021] ФИГ. 7D - это иллюстрация идентификации анатомической особенности зуба в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0022] ФИГ. 7E - это иллюстрация идентификации анатомической особенности зуба в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0023] ФИГ. 8A - это иллюстрация идентификации анатомической особенности зуба, определенной с помощью нейронной сети, в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0024] ФИГ. 8B - это иллюстрация идентификации анатомической особенности зуба, определенной с помощью нейронной сети, в его трехмерной визуализации в соответствии с примером реализации настоящего изобретения;
[0025] ФИГ. 9A - это иллюстрация идентификации контактной точки в трехмерной визуализации зуба в соответствии с примером реализации настоящего изобретения;
[0026] ФИГ. 9B - это иллюстрация идентификации контактной точки в трехмерной визуализации зуба в соответствии с примером реализации настоящего изобретения;
[0027] ФИГ. 10 - это функциональная диаграмма подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0028] ФИГ. 11 - это иллюстрация первоначальной зубной дуги и идеальной зубной дуги в соответствии с примером реализации настоящего изобретения;
[0029] ФИГ. 12A - это иллюстрация формы зубной дуги в соответствии с примером реализации настоящего изобретения;
[0030] ФИГ. 12B - это иллюстрация формы зубной дуги в соответствии с примером реализации настоящего изобретения;
[0031] ФИГ. 12C - это иллюстрация формы зубной дуги в соответствии с примером реализации настоящего изобретения;
[0032] ФИГ. 12D - это иллюстрация формы зубной дуги в соответствии с примером реализации настоящего изобретения;
[0033] ФИГ. 13 - это иллюстрация трехмерной визуализации почти идеальной зубной дуги в соответствии с примером реализации настоящего изобретения;
[0034] ФИГ. 14 - это функциональная диаграмма подпроцесса процесса системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения;
[0035] ФИГ. 15 - это иллюстрация трехмерной визуализации пересечений зубов в соответствии с примером реализации настоящего изобретения;
[0036] ФИГ. 16A - это иллюстрация верхней зубной дуги до начала движения в соответствии с примером реализации настоящего изобретения;
[0037] ФИГ. 16B - это иллюстрация верхней зубной дуги после движения к идеальной зубной дуге в соответствии с примером реализации настоящего изобретения;
[0038] ФИГ. 17 - это иллюстрация стоматологического снимка зуба в соответствии с примером реализации настоящего изобретения; и
[0039] ФИГ. 18 - это схема типового оборудования для внедрения системы планирования ортодонтического лечения в соответствии с примером реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0040] В контексте настоящего документа термин «множество» определяется как два или более двух. В контексте настоящего документа термин «другой» определяется как второй или больше. В контексте настоящего документа термины «включая» и/или «имея» определяются как включающие (т.е. открытый язык). Используемые в этом документе отсылки к «одной реализации», «некоторым реализациям», «реализации», «воплощению», «примеру» или схожим терминам означают, что конкретная функция, структура или характеристика, описанные в связи с реализацией, является частью, как минимум, одной реализации настоящего изобретения. Таким образом, появление подобных фраз в различных местах этого описания необязательно ссылается на одну и ту же реализацию. Более того, конкретные функции, структуры или характеристики могут комбинироваться любым подходящим способом в одной или нескольких реализациях без ограничений.
[0041] В стоматологическом контексте окклюзия определяется как контакт зубов либо в расслабленном состоянии, когда рот закрыт, либо при движении челюстей. Говоря более конкретно, зубная окклюзия может определять отношение между зубами верхней и нижней челюсти в момент контакта или в приконтактном состоянии.
[0042] Более того, зубная окклюзия в массе своей разделяется на окклюзию резцов, клыков, премоляров и моляров. Описывая контакт между зубами верхней зубной дуги и зубами нижней зубной дуги, используются три класса для отличия правильной окклюзии от неправильной. Например, боковая окклюзия мезио-щечного бугорка первого верхнего моляра относительно щечной фиссуры первого нижнего моляра может быть классифицирована как «первый класс». Подобным же образом три класса используются для описания контакта между клыками верхней и нижней челюсти. Подобного рода классификации играют важную роль в ортодонтической диагностике и планировании лечения зубов. В связи с этим окклюзия первого класса может быть определена как приемлемая окклюзия, в то время как второй и третий класс используются для определения патологического прикуса (аномальной окклюзии), требующего медицинского вмешательства, хирургического или иного. Более того, неспособность поддерживать или восстановить правильную окклюзию, даже при наличии правильного выравнивания, может привести к дискомфорту и боли для пациента, являющихся результатом чрезмерного износа зубов, повреждений и/или трещин, которые учащаются при наличии неправильного прикуса.
[0043] Другими словами, целью ортодонтического лечения должно быть обеспечение правильной окклюзии. Это означает, что планирование ортодонтического лечения включает в себя не только выравнивание зубов внутри зубных дуг, но и функциональную зависимость между зубными дугами, обеспечивающую правильный зубной контакт между верхней и нижней челюстями. Таким образом, планирование лечения, сосредоточенное исключительно на выравнивании упрощенных объектов (т.е. сфер или других простых форм) внутри зубной дуги, следует применять в клинической практике с осторожностью, так как риск неправильного прикуса остается неприемлемо высоким несмотря на то, что «объекты», т.е. зубы, сами по себе эстетически выровнены.
[0044] Но как было замечено выше, традиционные методы ортодонтического планирования, частично затрудненные необходимостью ручного планирования, до сих пор преимущественно сосредоточены на выравнивании смежных зубов внутри одной зубной дуги (т.е. верхней или нижней зубной дуги по отдельности). Учитывая описанную выше важность правильной окклюзии для здоровья зубов, следует иметь в виду, что любая система, стремящаяся обеспечить планирование эффективного ортодонтического лечения, должна принимать во внимание функциональные отношения между зубами разных зубных дуг.
[0045] Соответственно, настоящее изобретение описывает автоматизированную систему планирования ортодонтического лечения, которая принимает во внимание и выравнивание, и окклюзию при определении идеальной зубной дуги и движений, необходимых для приведения каждой зубной дуги в искомое положение.
[0046] Согласно конкретной реализации настоящего изобретения, система планирования ортодонтического лечения (СПОЛ) может включать в себя устройства для обработки данных, исполняющие вышеуказанные процессы. Система, включающая по меньшей мере одно вычислительное устройство, может быть реализована в виде одного или нескольких модулей. Например, СПОЛ может включать один или несколько модулей для создания, загрузки и предварительной обработки трехмерных моделей зубов пациента с учетом рецептов, правил и прочего. В частности, СПОЛ может включать в себя модуль определения идеальной зубной дуги на основании выравнивания, модуль для определения идеальной зубной дуги на основании окклюзии, модуль для определения контрольных точек зубов, используемых для определения идеальной зубной дуги на основании окклюзии, и модуль для разработки лечения, основанного на расположении зубов, предыдущих рецептов, ортодонтических правил и истории лечения. Определение идеальной зубной дуги на основе окклюзии может включать в себя оптимизацию искомой зубной дуги, принимая во внимание предписательные и ортодонтические правила и с учетом зубных пересечений в процессе установленных движений зубов.
[0047] Согласно реализации, СПОЛ также может включать в себя модуль для определения анатомических особенностей зубов каждой зубной дуги пациента, включающих оси локальной системы координат каждого зуба. В сложных случаях стертых зубов, подробно описанных в последующих иллюстрациях, СПОЛ может использовать метод автоматической коррекции анатомических особенностей зубного ряда, осей локальной системы координат и прочего. В частности, стертый зуб может быть отождествлен с помощью алгоритма машинного обучения, обученного на массиве здоровых зубов, и в этом случае идентифицируемые анатомические особенности каждого здорового зуба будут использоваться виртуально для позиционирования и передвижения стертого зуба. Как вариант, анатомические особенности зубов могут быть отредактированы вручную с помощью методов визуализации, используемых СПОЛ, для формирования идеальной зубной дуги на основе окклюзии.
[0048] Согласно реализации, идеальная зубная дуга на основе окклюзии может быть «почти идеальной» или искомой, так как формирование полностью идеальной зубной дуги может оказаться невозможным. В таком случае может быть сформирован и рассмотрен ряд возможных комбинаций положений зубов, удовлетворяющих пороговым показателям допустимой формы зубной дуги. Выбранная методом сравнения наилучшая зубная дуга будет назначена искомой зубной дугой.
[0049] Согласно реализации, искомая зубная дуга может оказаться не достижимой с помощью одного-единственного движения зубов или этапа движения зубов. В некоторых случаях может понадобиться произвести множество движений зубов или этапов движений зубов, чтобы передвинуть зубы из первоначального положения в окончательное, соответствующее искомой зубной дуге. В частности, помимо всего прочего, «пересечения» и ортодонтические правила могут помешать двум смежным зубам двигаться в сторону окончательного положения одновременно, тем самым потребовав, как минимум, первого этапа, в ходе которого передвигается первый зуб, и, как минимум, второго этапа, в ходе которого передвигается второй зуб. Дополнительные правила могут определить, что четыре смежных зуба нельзя двигать одновременно, что потребует движения пар зубов или отдельных зубов для достижения искомого положения. Более того, каждый этап, будь он один или несколько, может быть определен с дополнительным учетом клинических ограничений и прочего, как будет описано, подробно ссылаясь на последующие фигуры чертежей. Упрощенным примером подобного клинического ограничения является рекомендация о том, чтобы один этап лечения не приводил к движению зуба более, чем на 250 микрон. Таким образом, если общее необходимое движение зуба составляет расстояние в 750 микрон, такое движение потребует не менее трех этапов движения зубов.
[0050] В свете вышесказанного и для упрощения примерной реализации настоящего изобретения, ортодонтические правила могут запрещать одновременное движение передних и задних зубов. В этом примере, комбинация необходимых этапов движения зубов может быть рассмотрена, в общем, как «фазы» движения зубов. Например, с самого начала может быть определено, что для передвижения зубного ряда из первоначального положения в соответствующее искомой зубной дуге окончательное положение потребуется более одной фазы движения зубов, где каждая фаза движения зубов состоит из ряда этапов движения зубов. В случае, когда передние и задние зубы должны двигаться отдельно, комбинация этапов, необходимых для передвижения передних зубов, может быть названа «передней фазой» движения зубов, а этапы, необходимые для движения задних зубов, могут считаться «задней фазой» движения зубов. Как будет описано с отсылкой к последующим фигурам, СПОЛ с самого начала определяет число фаз движения зубов, где каждая фаза движения зубов представляет промежуточное или реальное искомое положение каждого зуба. Таким образом, зная каждую фазу и соответствующее ей промежуточное положение, можно определить этапы движения зубов, принимая во внимание все возможные переменные и ограничения, ортодонтические, клинические и какие-либо еще.
[0051] Согласно реализации, вводимые в СПОЛ данные могут включать в себя цифровые модели расположения зубов пациента, рецепт и историю лечения, ортодонтические правила и контролируемые параметры. Подобного рода ортодонтические правила и клинические ограничения могут включать в себя качественные ограничения, определяющие число и типы зубов, которые можно передвигать одновременно, или количественные ограничения, определяющие максимальное расстояние возможного движения.
[0052] Согласно реализации, результатом СПОЛ может быть планирование движения зубов к установленной для пациента искомой зубной дуге. В связи с этим СПОЛ может исполнить функцию формирования серии движений зубов, которые передвигают зубы в зубном ряду в сторону искомой зубной дуги. Движения зубов или фазы движения зубов могут быть разделены на этапы, где каждый этап определяет и обеспечивает «шаблон» для изделия для ортодонтического лечения, такого как ортодонтические капы на ФИГ. 1. Изделия для ортодонтического лечения могут быть разработаны для каждого из этапов движения зубов. В примере, каждый этап оптимизирован СПОЛ в соответствии с рецептами, ортодонтическими правилами и клиническими ограничениями, принимая во внимание возможные пересечения и столкновения на основании цифровой модели расположения зубов пациента.
[0053] Согласно реализации и как указано выше, положение зубов в установленной искомой зубной дуге может потребовать одной или нескольких фаз движения зубов. В примере, положение каждого зуба в ходе одной или нескольких фаз может считаться промежуточным положением. Соответственно, конкретные расчеты траекторий зуба, соответствующих этапам движения, подобно тем, что описаны в ФИГ. 14, могут быть проведены с учетом промежуточного положения и/или установленной искомой зубной дуги, так как промежуточное положение может стать реальным искомым положением зуба.
[0054] Как было предложено, СПОЛ может включать в себя все необходимые правила, определенные на основании истории болезни пациента, как требуется для планирования протоколов движения зубов. Этапы движения зубов внутри каждой фазы движения зубов можно отслеживать внутри СПОЛ.
[0055] Согласно реализации, СПОЛ может включать в себя модуль формирования каждого этапа движения зубов. Каждый этап движения зубов может сопровождаться трехмерной моделью, сформированной в соответствии с каждым движением зубов, где трехмерная модель определяет форму изделия для ортодонтического лечения.
[0056] Согласно реализации, СПОЛ может включать в себя один или несколько модулей для визуализации расположения зубов пациента и процесса движения зубов к почти идеальной зубной дуге.
[0057] Согласно реализации и как отмечено выше, в сложных случаях, когда зубы пациента стерты, и поэтому кончики зубов и края резцов могут не поддаваться простому определению, СПОЛ может обеспечить автоматическую или полуавтоматическую коррекцию стертых анатомических особенностей зубов и посредством этого идентификацию контрольных точек зубов. Автоматическая или полуавтоматическая коррекция стертых анатомических особенностей зубов и посредством этого идентификация контрольных точек зубов могут включать в себя использование технологий, основанных на машинном обучении, где контрольные точки зубов идентифицируются с использованием основанного на машинном обучении метода, обученного на массиве нестертых зубов.
[0058] Эти контрольные точки зубов могут быть впоследствии использованы для формирования идеальной зубной дуги или искомой зубной дуги.
[0059] Согласно реализации, вычислительные схемы СПОЛ могут быть расположены в одном или нескольких локальных устройствах, развернутом в облаке устройстве или в их комбинации.
[0060] Согласно реализации, настоящее изобретение описывает систему для создания индивидуальных изделий для ортодонтического лечения.
[0061] Что касается иллюстраций, ФИГ. 1 - это иллюстрация ортодонтических кап, созданных для шага движения зубов и основанных на рецепте схемы ордотонтического лечения, сформированного СПОЛ в соответствии с реализацией настоящего изобретения. В реализации настоящего изобретения ортодонтические капы 101 могут быть сформированы для каждого установленного этапа ортодонтического лечения, где ортодонтические капы 101 постепенно передвигают каждый зуб зубного ряда. В этой связи ортодонтические капы 101 могут быть ортодонтической капой для верхней зубной дуги 102 и ортодонтической капой для нижней зубной дуги 103, где ортодонтические капы 101 настроены так, чтобы обеспечить правильное выравнивание и окклюзию для верхней зубной дуги 102 и нижней зубной дуги 103 в искомом положении.
[0062] ФИГ. 2 - это функциональная диаграмма процесса 200 СПОЛ в соответствии с примерной реализацией настоящего изобретения. Каждый шаг процесса 200 СПОЛ может быть произведен локальной и/или удаленной вычислительной схемой.
[0063] Изначально, относящиеся к пациенту данные могут быть получены во время шага 220 процесса 200. Подобного рода данные, описанные более подробно в ФИГ. 3, могут включать в себя медицинские рецепты от врачей, а также медицинские изображения и ортодонтические правила, которые частично определяют рецепт.
[0064] В ходе подпроцесса 225 процесса 200 полученные данные пациента могут пройти первоначальную обработку. Подобная первоначальная обработка может включать в себя, в частности, формирование и анализ трехмерной модели расположения зубов пациента, сгенерированной на основе полученных медицинских изображений. Чтобы гарантировать надлежащую точность трехмерной модели в том, что касается определения контрольных точек зубов и формирования пригодного к использованию схемы ортодонтического лечения, подпроцесс 225 может включать в себя манипуляцию сгенерированных трехмерных моделей, включая сглаживание особенностей, уменьшение интерполяций и другие стратегии создания полного набора данных модели. В дополнение к вышесказанному, определение и назначение зубов могут быть приблизительно проведены с помощью технологий распознавания образов. Таким образом, резцы, клыки, премоляры или двухбугорковые зубы, моляры и прочие в верхнем и нижнем зубных рядах могут быть надлежащим образом классифицированы или помечены для дальнейшей обработки. В реализации разметка и назначение зубов в зубных рядах могут быть проведены вручную или автоматически в соответствии с подробным перечнем. Кроме того, параметры трехмерной модели могут быть модифицированы в соответствии с ортодонтическими данными пациента. Например, ортодонтические данные пациента могут включать в себя конкретные указания от врача и/или быть основаны на анатомических особенностях пациента, где ортодонтические данные предписывают движение конкретного зуба. В примере, подобные инструкции по поводу движения конкретного зуба могут состоять в том, чтобы не дать конкретному зубу двигаться.
[0065] Согласно реализации, первоначальная обработка подсистемы 225 процесса 200 может включать в себя распознавание отсутствующих зубов и урегулирование их отсутствия. Например, если зуб №2 (т.е. второй самый дальний зуб с правой стороны верхнего зубного ряда) отсутствует, подсистема 225 процесса 200 может сгенерировать модель коронки «стандартного» зуба №2, чтобы заменить отсутствующий зуб №2. Заменив отсутствующий зуб виртуальной коронкой, СПОЛ может затем работать с полноценной зубной дугой при определении движения зубов.
[0066] Более подробное описание подпроцесса 225 процесса 200 будет дано в связи с ФИГ. 4.
[0067] В рамках подпроцесса 230 процесса 200, контрольные точки каждого зуба внутри трехмерной модели могут быть извлечены для формирования усложненной модели зуба, принимая во внимание выравнивание и окклюзию. Как будет описано более подробно в связи с ФИГ. 5А-9B, контрольные точки зубов могут быть, например, анатомическими особенностями каждого зуба, включая режущие края резцов, бугорки премоляров и моляров и прочее. При определении анатомических особенностей зубов генерируется трехмерная модель каждого зуба, которая затем обрабатывается для определения и формирования осей локальной системы координат для каждого зуба внутри трехмерной модели. В случае сложных рецептов анатомические особенности зубов могут быть визуализированы и отредактированы автоматически, полуавтоматически или вручную. В примере, полуавтоматическое редактирование может включать в себя, в частности, ручной выбор анатомической особенности зуба, нуждающейся в модификации, и её автоматическую коррекцию, или же, например, автоматическую идентификацию нуждающейся в модификации анатомической особенности зуба и её последующую ручную коррекцию. Автоматическая идентификация как часть полуавтоматической коррекции нуждающейся в модификации анатомической особенности зуба может быть основана на сравнении параметра анатомической особенности с предельным значением параметра. Однако, следует иметь в виду, что описанные выше случаи даны исключительно для примера, и что другие случаи могут быть рассмотрены без отступления от существа изобретения.
[0068] В рамках подпроцесса 240 процесса 200, извлеченные контрольные точки зубов могут быть использованы для определения идеальной зубной дуги для верхнего и нижнего зубных рядов с учетом выравнивания и окклюзии. В случаях, когда достижение идеальной зубной дуги невозможно, система может идентифицировать «почти идеальную» или искомую зубную дугу в соответствии с подпроцессом, описанным более подробно в связи с ФИГ. 10. В качестве примера, идеальная зубная дуга может быть установлена как зубная дуга, достигнутая без пересечений соседних зубов (т.е. пересечений и/или столкновений). Однако в клиническом случае может оказаться, что каждый из зубов не может достигнуть идеального положения в зубном ряду, избежав при этом пересечения зубов. СПОЛ может установить подобные пересечения зубов и принять их во внимание при разработке искомой зубной дуги, в ходе которой искомая зубная дуга будет выбрана из набора определенных зубных дуг и получит назначение в виде серии возможных движений зубов и окончательных конфигураций для достижения «почти идеальной» зубной дуги. В соответствии с реализацией, искомая зубная дуга может подразумевать расширение зубного ряда в процессе учета или избегания пересечений зубов. В частности, расширение зубного ряда может стать искомым окончательным положением или может быть проведено как промежуточное положение с целью избежать пересечений, где промежуточное положение - это фаза, определяемая через один или несколько этапов движения зубов.
[0069] В рамках подпроцесса 250 процесса 200, возможные фазы и этапы движения зубов устанавливаются на основании определенной искомой зубной дуги из подпроцесса 240. После установления искомой зубной дуги и окончательных положений зубов в ней и, принимая во внимание изначальное положение каждого зуба в зубном ряду, можно определить искомые промежуточные положения зубов. Искомые промежуточные положения зубов могут представлять собой, как в примере, фазы движения зубов, где каждая фаза определена этапами движения зубов, позволяющих достичь искомых промежуточных положений зубов. Как показано в примере, можно провести качественное сравнение первоначальных положений зубов и соответствующих им окончательных положений зубов установленной искомой зубной дуги с учетом ортодонтических и клинических ограничений, чтобы помочь с определением искомых промежуточных положений зубов и, соответственно, с числом фаз, требуемых для достижения окончательного положения установленной искомой зубной дуги. Более того, этапы движения зубов, необходимые для достижения искомых промежуточных положений зубов, можно определить с учетом ортодонтических и клинических ограничений и других медицинских данных пациента 220. Например, позиционное несовпадение между окончательными положениями зубов в искомых промежуточных зубных дугах каждой фазы и первоначальными положениями соответствующих зубов с учетом ограничений на движение может повлиять на требуемое число этапов движения зубов.
[0070] Как подробно описано в связи с ФИГ. 14 и 15, создание возможных движений зубов или возможных траекторий зубов для каждой фазы движения зубов может включать в себя создание списка возможных путей (т.е. дерево движений зубов), которые могут достичь искомых промежуточных положений зубов искомой зубной дуги с учетом длины маршрута, скорости движения, возможных пересечений и столкновений и ортодонтических правил. Как показано в примере, список возможных путей может включать в себя множественные возможные пути движения, где траектория или вектор каждого пути отражает один этап движения. В другом примере список возможных путей может включать в себя множественные возможные пути движения, где каждый путь движения включает в себя множественные траектории или векторы, отражающие множественные этапы движения, необходимые для достижения искомого промежуточного положения зубов. Как указано, каждый список возможных путей может включать в себя множество путей движения, определенных этапами, необходимыми для проведения каждой фазы движения зубов. Соответствующим образом этот список возможных путей и соответствующих им этапов движения зубов может быть получен в результате подпроцесса 260 процесса 200.
[0071] В рамках подпроцесса 260 процесса 200 можно, с возможным участием в процессе проверки профессионального ортодонта, выбрать оптимальный путь как набор этапов движения зубов, определяющих план ортодонтического лечения. План ортодонтического лечения может включать в себя рецепт или указания об оптимальном пути для каждой фазы лечения. Соответствующим образом, рецепт схемы ортодонтического лечения может быть использован для руководства производством соответствующих ортодонтических кап, вроде изображенных на ФИГ. 1, или схожего скрепляющего изделия. Подпроцесс 260 будет подробно описан в связи с ФИГ. 16А и 16В.
[0072] Представленный выше процесс 200 теперь будет описан в подробностях со ссылкой на последующие иллюстрации.
[0073] Со ссылкой на ФИГ. 3, шаг 220 процесса 200 СПОЛ включает получение данных пациента. Данные пациента могут включать в себя, среди прочего, одно или несколько медицинских изображений 321, правила и ограничения от врача 322, зуболечебный рецепт от врача 323, ортодонтические правила и ограничения 324, и системные параметры и настройки 321, где, в соответствии с примером, системные параметры и настройки 321 связаны с одним или несколькими медицинскими изображениями 321. Правила и ограничения от врача 322 могут включать себя, помимо прочего, такие указания, как «не двигайте зубы 9, 10 и 11, так как они формируют мост» или «не закрывайте пространство между зубами 13 и 14, так как это пространство занято или будет занято имплантатом». Зуболечебный рецепт от врача 323 может включать в себя такие указания, как «провести лечение обоих зубных рядов», «расширить верхний зубной ряд», «сузить нижний зубной ряд», «выровнять режущие края» и прочее. Ортодонтические правила и ограничения 324, которые могут быть установлены в соответствии с известными ортодонтическими стандартами и общими принципами, могут, например, представлять собой ограничение о том, что максимальный отрезок движения зуба в рамках одного этапа движения зубов не может превышать 250 микрон.
[0074] Одно или несколько медицинских изображений 321, полученных в ходе шага 220 процесса 200, могут быть получены различными методами. Тем не менее, следует понимать, что цифровые представления и/или трехмерные модели расположения зубов пациента требуют данных с высоким разрешением, так как характерный размер зубов и возможные параметры движения зубов достаточно малы. Подобная тщательность и точность могут потребоваться для извлечения анатомических особенностей зубов, учета возможности столкновений и формирования движений зубов в последующих шагах процесса 200. Таким образом, метод медицинской визуализации должен быть точным и тщательным. В этой связи методы, используемые для получения цифровых представлений изначального расположения зубов пациента, могут включать в себя, не ограничиваясь, слепки, интраоральные сканы, УЗИ, компьютерную томографию и МРТ, как по отдельности, так и в связке.
[0075] Согласно реализации, для создания цифрового представления и/или трехмерной модели расположения зубов пациента, внутриротовой сканнер может быть использован для получения топографических характеристик коронок зубов. Внутриротовой сканнер может использовать метод, выбранный из группы, включающей без ограничения лазеры, инфракрасный свет и структурированный свет. Для того, чтобы движения зубов могли быть установлены в контексте коронок зубов и, в частности, корней зубов (как описано позже), метод рентгеновского отображения может быть использован, чтобы получить пространственную информацию, связанную с корнями и надкостницей зуба, включая ее мягкие ткани и костные ткани (т.е. альвеолярный отросток). Подобная технология, рассмотренная позже в настоящем изобретении, описана в заявке на патент США №16/017,687, включенной в данный текст полностью посредством отсылки. При реализации метод рентгеновского отображения может быть выбран из группы, включающей, помимо прочего, проекционную рентгеновскую съемку, компьютерную томографию, двухэнергетическую рентгеновскую абсорпциометрию, флюороскопию и контрастную рентгенографию. В приведенном примере, методом рентгеновского отображения может быть коническая компьютерная томография. Рентгеновские изображения могут состоять из многоплоскостных рентгеновских изображений, включая в том числе сагиттальные, аксиальные и корональные. Следует иметь в виду, что помимо рентгеновских технологий для получения изображений, описывающих пространственную информацию о корнях и надкостницах, можно использовать множество методов визуализации, включая, в том числе, УЗИ.
[0076] Согласно реализации, правила и ограничения от врача 322 могут включать в себя диагноз и рекомендации по лечению, которые могут быть приняты СПОЛ к сведению при планировании лечения, где диагноз и рекомендации по лечению включают в себя все данные и оценки, требуемые системой, например, индекс сложности патологии, возможные ограничения и другие специализированные данные.
[0077] Согласно реализации, рецепт от врача 323 может включать в себя общие инструкции, выданные врачом в момент внесения других данных пациента. Подобные инструкции могут включать в себя ограничения, поставленные клиническими протоколами движения зубов, которые определяют, сколько зубов можно двигать одновременно, максимальное расстояние, на которое могут быть подвинуты зубы, разрешенную скорость их движения, типы движения, требующие внешних изделий (т.е. замков), и типы движения, которые можно совмещать. Клинические протоколы движения зубов могут обновляться в соответствии с клиническими результатами.
[0078] После получения данных пациента в шаге 220 процесса 200 можно провести первоначальную обработку. В этой связи и с отсылкой к ФИГ. 4, функциональная диаграмма подпроцесса 225 процесса 200 СПОЛ будет описана в соответствии с примерной реализацией настоящего изобретения.
[0079] В ходе шага 470 подпроцесса 225 могут быть рассмотрены одно или несколько медицинских изображений, полученных в ходе шага 220 процесса 200. Подобная проверка может включать в себя оценку одного или нескольких медицинских изображений в двухмерном виде или оценку трехмерных цифровых моделей, сгенерированных из полученных одного или нескольких медицинских изображений, чтобы идентифицировать данные, которые могут быть недостаточного качества для последующего анализа и планирования лечения. Например, конкретная область медицинского изображения, множество медицинских изображений или цифровая модель могут иметь ограниченную пиксельную плотность и поэтому не обеспечивать достаточных данных для последующей обработки. В другом случае, конкретная область медицинского изображения/й или цифровая модель могут отсутствовать вообще, будучи случайно упущенными в процессе получения медицинских изображений.
[0080] Если, в ходе шага 471 подпроцесса 225, установлено, что не требуется усовершенствования как минимум одного из одного или нескольких медицинских изображений или цифровой модели, подпроцесс 225 может переходить к шагу 473. Однако же если будет определено, что требуется усовершенствование, как минимум, одного или нескольких медицинских изображений или цифровых моделей, усовершенствование может быть проведено в ходе шага 472 подпроцесса 225. Например, пропущенные данные могут быть заменены примерным определением пропущенных данных, каковое определение основано на простых геометрических моделях или более сложных методах, основанных на машинном обучении, которые определяют пропущенные данные на основании атласа медицинских изображений «нормального» расположения зубов и созданных на их основе двухмерных представлений или трехмерных цифровых моделей. В связи с этим, усовершенствование может представлять собой сглаживание, децимацию, интерполяцию и прочее, произведенные на двухмерных данных одного или нескольких медицинских образов, трехмерных данных каждой цифровой модели или их комбинации. Следует принять во внимание, что дополнительные стратегии усовершенствования, включающие в себя, помимо прочего, параметризацию или репараметризацию трехмерной модели, могут быть использованы, не отступая при этом от сущности изобретения.
[0081] В ходе шага 473 подпроцесса 225 может быть проведена описательная идентификация расположения зубов и, в частности, зубной анатомии. Описательная идентификация может включать в себя распознавание изображений строения зубов и классификацию (или индексирование) каждого зуба в соответствии с выбранной терминологией. Следует понимать, что в данном случае может быть использовано множество методов идентификации и классификации зубной анатомии, что очевидно специалисту в соответствующей области техники. В примере, каждый зуб из распознанных может быть промаркирован в соответствии с универсальной системой нумерации зубов, в которой зуб №1 - это самый дальний зуб справа в верхнем зубном ряду, а зуб №17 - это самый дальний зуб слева в нижнем зубном ряду. Стоит отметить, что маркировка распознанных зубов в соответствии с универсальной системой нумерации зубов позволяет идентифицировать у некоторых пациентов отсутствующие зубы, так как универсальная система нумерации зубов маркирует каждый зуб в соответствии с ожидаемым расположением зубов «контрольного» или здорового пациента, в подходящих случаях пропуская отсутствующие зубы.
[0082] Из-за этого, и как было показано выше, отсутствующие зубы могут быть идентифицированы в ходе шага 474 подпроцесса 225. В частности, промаркированные одно или несколько медицинских изображений и/или цифровая модель могут быть оценены, чтобы определить, есть ли у пациента полный набор зубов. Если установлено наличие полного набора зубов, каждый промаркированный зуб может быть «назначен» в верхний или нижний зубной ряд в ходе шага 476 подпроцесса 225. Однако же, если определено отсутствие зубов, например, в результате удаления, зубы могут быть «заменены» в ходе шага 475 подпроцесса 225. «Замена» зуба может включать в себя вставку виртуальной коронки на место отсутствующего зуба, где виртуальная коронка является нормативной коронкой зуба, выбранной из атласа зубных рядов, или же производной основанного на машинном обучении метода, который принимает во внимание факторы, связанные с конкретным пациентом, при разработке формы зубной коронки. «Заменив» отсутствующие зубы, подпроцесс 225 может двигаться к шагу 476, в рамках которого каждый промаркированный зуб может быть назначен либо в верхний, либо в нижний зубной ряд, тем самым позволяя в дальнейшем произвести определение окклюзии.
[0083] В ходе шага 477 подпроцесса 225б общая структура цифровой зубной модели может быть сгенерирована из промаркированной и назначенной зубной анатомии пациента, создав всеобъемлющую трехмерную цифровую модель зубного пространства. Эта цифровая зубная модель может быть использована в рамках последующих подпроцессов как «первоначальная модель» расположения зубов пациента, где первоначальная модель используется в качестве основы для определения идеальной зубной дуги, искомой зубной дуги, и определения путей движения зубов и траекторий каждого этапа движения зубов.
[0084] Кратко возвращаясь к ФИГ. 2 и проведя изначальную обработку данных пациента в подпроцессе 225, процесс 200 переходит к подпроцессу 230, в рамках которого извлекаются контрольные точки зубов. Контрольные точки зубов, такие как гребни, бугры и режущие края, позволяют точно определить выравнивание и окклюзию с помощью, как минимум, анатомических особенностей и контактных точек зубов, и поэтому должны быть определены, чтобы сгенерировать идеальную зубную дугу, искомую зубную дугу и пути движения зубов к ним.
[0085] Как считается в математике, под «контрольной точкой» понимается контрольная точка кривой. Схожим образом, как описано в настоящем изобретении, «контрольная точка зуба» в зубном ряду может быть, помимо прочего, контактной точкой, и идеальная зубная дуга может быть представлена кривой, смоделированной из ломаной линии, чьи отрезки являются внутренними интервалами между контактными точками соседних зубов в зубном ряду. Таким образом, как описано в ФИГ. 5А-9В, извлечение контрольных точек зубов, включая контактные точки, необходимо для определения идеальной зубной дуги.
[0086] Извлечение контрольных точек зубов может быть проведено множеством методов, включая использование изолиний, нейронных сетей, распознавание образов и прочее. Следует принять во внимание, что контрольные точки зубов, описанные в этом тексте, являются лишь примерами многообразия контрольных точек зубов, которые могут быть использованы с той же целью, не отклоняясь от сущности настоящего изобретения. Более того, использование изолиний для извлечения контрольных точек зубов будет изначально описано с отсылкой к подпроцессу 230 с ФИГ. 5А.
[0087] Как правило, использование изолиний включает в себя создание разделенной на части карты топографических особенностей, в данном случае, зубов. Различные арифметические вычисления могут быть произведены для определения и извлечения из карты конкретной особенности. Например, в части зубов, главный бугор премоляра, используемый для определения пересечения при моделировании окклюзии, может быть идентифицирован 533 через нахождение самой высокой вложенной изолинии, как показано на ФИГ. 6, где круговые линии изображения обозначают разные изолинии зуба относительно измерений x и y зуба. В этом случае каждая изолиния обозначает возвышение относительно плоскости изображения. В контексте ФИГ. 7В-7Е, идентифицированные контрольные точки зубов или характеристики зубов 534 проиллюстрированы на сетчатой пластине (показанной пустой на ФИГ. 7А). В связи с этим, щечный бугорок 711 может быть виден на ФИГ. 7В, гребень лингвального бугорка 712 может быть виден на ФИГ. 7С, медиально-язычный и дистально-язычный скаты 713 и участки контакта с противолежащими зубами можно видеть на ФИГ. 7D, и мезиодистальная фиссура 714, представляющая область вокруг самых низких вложенных изолиний зуба, видна на ФИГ. 7Е. Идентифицированные контрольные точки зубов могут включать в себя, в контексте ФИГ. 9А и ФИГ. 9В, контактные точки. В случае премоляра, как на ФИГ. 9А и ФИГ. 9В, контактные точки могут быть указаны кругами 909 и находиться в положении, где линейные расширения главной фиссуры (на ФИГ. 7) встречаются с изломанной изолинией. Другими словами, контактные точки могут существовать, как в примере, на позициях, где линейные расширения главной фиссуры более не пересекаются с определенной изолинией.
[0088] Говоря более конкретно, для достижения вышеописанного, подпроцесс 230 может быть применен к каждому зубу каждого зубного ряда, начиная с шага 531. В ходе шага 531, изолинии вычисляются в рамках плоскости xOz, где плоскость xOz - это плоскость, определенная осями x и z с началом в ‘O’. Для конкретного зуба эти изолинии могут быть вычислены как линии цифровой модели зуба, пересекающиеся с плоскостью xOz. Центроиды могут быть вычислены для полученных изолиний и, используя, к примеру, метод наименьших квадратов, вертикальная ось зуба может быть построена в ходе шага 532 подпроцесса 230.
[0089] В ходе шага 532 и для того, чтобы начать идентификацию анатомических особенностей зубов, можно вычислить изолинии плоскости, перпендикулярной вертикальной оси каждого зуба. Другими словами, каждая линия цифровой модели зуба, которая пересекается с плоскостью, перпендикулярной вертикальной оси, определяется как изолиния. В одном случае, отдельная изолиния или вложенная изолиния может быть использована для идентификации релевантной анатомической особенности зуба. В другом случае, зуб может иметь больше, чем одну анатомическую особенность, и поэтому для идентификации анатомических особенностей требуется отслеживать группы вложенных изолиний. В этой связи, каждая серия изолиний в списке вычисленных изолиний индексируется таким образом, что последующие серии изолиний могут быть «вставлены» в предыдущую серию и спроецированы на плоскость. Подобным образом множественные вложенные изолинии могут быть сгруппированы в более крупную вложенную группу.
[0090] В ходе подпроцесса 534 подпроцесса 230 и в контексте ФИГ. 5В, для каждой изолинии серии идентифицируются точки наибольшего расстояния. Другими словами, соответствующие или смежные точки изолинии оцениваются, чтобы определить, между какими парами существует наибольшее расстояние. В ходе шага 535 подпроцесса 534, подобного рода соответствующие или смежные точки, в отношении которых установлено наличие максимального расстояния, идентифицируются как определяющие режущий край зуба. Как было отмечено ранее, режущим краем зуба может быть край резца, бугорок или что-то подобное, основанное на аналитике зуба. В ходе шага 536 подпроцесса 534, центроиды последней изолинии в серии рассчитываются и идентифицируются как определяющие бугорки зубов, где небольшие подъемы меняющегося размера на коронке зуба представляют утолщенный слой эмали или добавочный бугорок.
[0091] Согласно реализации, бугорки зубов, рассчитанные в ходе шага 536 подпроцесса 534, используются в подпроцессе 537 подпроцесса 534 для вычисления точек, определяющих фиссуры зуба, где фиссуры - это желобки у основания бугорков или края резцов, где постоянно собираются органические продукты разложения. В этой связи и в контексте ФИГ. 5С, область, сгенерированная полигоном, чьи вершины находятся в точках вычисленных бугорков зуба, устанавливается в ходе шага 597 подпроцесса 537. В ходе шага 598 подпроцесса 537, эта область может быть разделена на подобласти с точками, обладающими минимальными координатами по рассчитанной вертикальной оси. В результате, подобные подобласти могут быть использованы в ходе шага 599 подпроцесса 537, чтобы установить точки, определяющие фиссуры зубов.
[0092] Возвращаясь к ФИГ. 5А, после идентификации в качестве контрольных точек зубов таких анатомических особенностей зубов как режущий край зуба, можно установить горизонтальную ось. С этой целью точки, определяющие режущий край зуба, могут быть объединены с соответствующим вектором вертикальной оси, установленной в ходе шага 523 подпроцесса 230, с целью определения горизонтальной оси. В частности, определяющие режущий край зуба точки могут быть спроецированы на плоскость, перпендикулярную вертикальной оси зуба, и из этого, используя метод наименьших квадратов и спроецированные точки режущего края зуба, может быть сгенерирована горизонтальная ось. Следует, однако, понимать, что метод наименьших квадратов является лишь примером одного из множества методов производства регрессивного анализа или схожим образом аппроксимации решения, не отступая при этом от сущности настоящего изобретения.
[0093] Соответствующим образом, в ходе шага 539 подпроцесса 230 можно установить контактные точки как подмножество контрольных точек зубов. В этой связи идентифицируются точки с самыми большими и малыми координатами на оси Ox. Принимая во внимание соседние зубы внутри зубных рядов и между зубными дугами, идентифицированные точки формируют контактные точки, которые могут быть использованы для оценки окклюзии и определения идеальной зубной дуги, как будет описано в контексте ФИГ. 10-13.
[0094] Как указано выше и показано на примере использующего изолинии метода, извлечение анатомических особенностей зубов может быть проведено множеством способов. В примере и с отсылкой к ФИГ. 8А и ФИГ. 8В, анатомические особенности зубов могут быть извлечены, используя стратегию машинного обучения, например, нейронные сети.
[0095] Согласно реализации, основанный на нейронных сетях метод может реализовать искусственную нейронную сеть (ИНС), обученную использовать (1) метод сегментации, например, сегментацию сетки, и (2) классифицировать или маркировать трехмерные цифровые модели расположения зубов или отдельные зубы. В такой реализации сегментация сетки и маркировка могут быть объединены в единый метод, такой как PointNet и ему подобные. PointNet, алгоритм сегментации и классификации с открытым исходным кодом, обеспечивает архитектуру глубокой сети, которая потребляет облака сырых точек (т.е. наборы точек) без вокселизации или отображения. В свою очередь, PointNet изучает как локальные, так и глобальные особенности точек, обеспечивая эффективный метод для ряда задач по распознаванию трехмерных изображений.
[0096] Рассмотренная в контексте настоящего изобретения, ИНС может быть основана на наборе классифицированных изображений, включающих, в одном случае, каждый возможный тип зуба внутри зубного ряда пациента, включая резец, клык, премоляр и моляр. В другом случае, ИНС может быть основана на обобщенной модели зубов. В любом из этих случаев ИНС может быть затем обучена идентифицировать сегменты каждого классифицированного изображения, соответствующие описанным выше анатомическим особенностям зубов и контактным точкам. Например, сегменты могут быть определены как бугорки 807, режущие края 808, гребень язычного бугорка 812, мезиодистальная или главная фиссура 814, медиально-язычные и дистально-лингвальные скаты 813, и прочее.
[0097] Таким образом, будучи использована в реализации, ИНС может провести сегментацию либо (1) рассмотрев все вершинные точки и определив «класс» каждой вершинной точки, либо (2) рассмотрев другие элементы сетки, такие как стороны и ребра треугольника, и на этом основании предсказать их классификацию. В любом случае, результатом является сегментированная сетка, где каждый класс или сегмент трехмерной модели зуба соответствует искомой анатомической особенности зуба. Подобный результат проиллюстрирован на ФИГ. 8А и 8В, где различные классы или сегменты каждого зуба идентифицированы как области разного цвета, соответствующие разным искомым контрольным точкам.
[0098] Согласно реализации, описанный выше подпроцесс 230 процесса 200 может быть изменен в случае сложности идентификации контрольных точек зубов. Говоря конкретно, может оказаться, что зубы пациента от времени стерлись так, что естественные контрольные точки зубов не могут быть легко идентифицированы, а в некоторых случаях их просто не существует. Хотя в некоторых случаях используются заместительные точки, наличие стертых зубов зачастую требует ручного вмешательства. При рассмотрении его как масштабируемого процесса, ручное вмешательство превращается в уменьшающий скорость работы шаг, обременительный для эффективного лечения.
[0099] Таким образом, при возникновении необходимости проводить планирование ортодонтического лечения в требуемом масштабе (т.е. для широкого внедрения) становится важно автоматизировать процессы. Однако, автоматизация процесса 230, как он описан в ФИГ. 5А, осложняется, когда зубы стерты, и анатомические особенности трудно идентифицировать. Когда зубы стерты в результате неправильного прикуса, скрежетания зубами и тому подобного, контрольные точки зубов, такие как фиссуры, бугорки, края, желобки, ямки и прочее, могут быть деформированы и/или исчезнуть совсем. Поэтому, когда у зубов нет контрольных точек, необходимых для создания идеальной или искомой зубной дуги, обеспечивающей правильную окклюзию, автоматизированные системы часто дают сбой.
[00100] В этой связи и в качестве реализации настоящего изобретения, предлагается метод генерации виртуальных контрольных точек стертых зубов, основанный на трехмерных моделях нормальных зубов, которые были стерты. Этот метод может использовать, в частности, метод машинного обучения, такой как генеративно-состязательная нейронная сеть или другая схожая нейронная сеть глубокого обучения. Чтобы точно предсказать виртуальные контрольные точки стертых зубов, метод машинного обучения должен быть соответствующим образом натренирован. В частности, метод машинного обучения можно обучить на специальном массиве данных, собранном из трехмерных моделей здоровых зубов. В данном примере, трехмерные модели здоровых зубов могут быть моделями объекта, описывающими его форму двухмерной меш-сетью в трехмерном пространстве (surface mesh model). Трехмерные модели здоровых зубов обучающего массива данных могут быть обработаны как в подпроцессе 230 процесcа 200. Однако впоследствии определенные особенности трехмерной модели surface mesh могут быть удалены из модели с целью получения стертого зуба. В этой связи обучающий массив данных состоит из промаркированных стертых зубов, которые могут быть использованы для предсказания необходимых виртуальных контрольных точек зубов на основании ограниченных анатомических особенностей стертого зуба.
[00101] В приведенном примере особенности, удаленные из модели, могут быть выбраны вручную или автоматически. Автоматизированный процесс может включать в себя (1) нахождение особенности, которая будет или уже стерта, (2) выбор области сетки, окружающей область особенности, и (3) проведение процедуры деформации сетки. Процедурой деформации сетки может быть разглаживающая процедура, вроде лапласиана или гауссиана, удаление выбранной области сетки и заполнение удаленной области плоской заплаткой, и удаление выбранной области сетки и заполнение удаленной области изогнутой заплаткой, где изгиб изогнутой заплатки соединяет аспекты треугольников, расположенных на открытом краю удаленной области сетки.
[00102] Теперь, в контексте ФИГ. 10, после идентификации контрольных точек зубов, включая анатомические особенности и контактные точки зубов, можно устанавливать форму идеальной зубной дуги. Идеальная зубная дуга может представлять, если это возможно, идеальное окончательное положение каждого зуба и указывать, какие движения зубов из первоначального зубного ряда могут быть необходимы. Описанное в ФИГ. 10 и с отсылкой обратно к ФИГ. 2, определение идеальной зубной дуги проводится подпроцессом 240 процесса 200.
[00103] В двух словах, создание идеальной зубной дуги, принимая во внимание выравнивание, форму ряда и окклюзию, подразумевает итерационный процесс, который принимает во внимание локальные базы, классифицированные интервалы, контрольные точки и прочее. В идеальном случае этот процесс позволяет создать идеальную дугу, избегающую пересечений и столкновений в ходе движения зубов из первоначального положения зубного ряда 1146, как показано на ФИГ. 11, к окончательному положению зубного ряда. Будучи сгенерированной, идеальная зубная дуга может быть использована в качестве искомого положения 1147 для зубов зубного ряда пациента с вычисленными между ними фазами и их этапами для достижения этого искомого положения 1147.
[00104] На формирование идеальной зубной дуги влияет окклюзия. В качестве общего правила, окклюзия идеальных зубных дуг подразумевает положение и расположение зубов пациента так, чтобы они соответствовали ортодонтическим правилам и принципам красоты и здоровья. Говоря более конкретно, окклюзия идеальных зубных дуг основана на известных ортодонтических критериях хорошей окклюзии, определенных для каждой анатомической плоскости зубов. В сагиттальной плоскости эти критерии могут включать в себя: (1) контакт между мезио-щечным бугорком первого моляра верхнего зубного ряда и пересечения продольной и поперечной фиссур первого моляра нижнего зубного ряда; (2) контакт резца верхнего зубного ряда с задним гребнем соответствующего резца и передним гребнем премоляра нижнего зубного ряда; (3) контакт между верхними и нижними резцами; (4) наложение верхних резцов на нижние резцы; и (5) угол в 120° между резцами. Во фронтальной проекции эти критерии могут дополнительно включать в себя: (1) наложение верхних резцов на нижние резцы до 1/3 высоты коронки соответствующего нижнего резца; и (2) контакт между премолярами и молярами верхнего и нижнего зубных рядов. В поперечной плоскости эти критерии могут включать в себя: (1) наложение верхних моляров на нижние моляры в размере, равном размеру бугорка верхнего моляра.
[00105] В дополнение к вышесказанному, форма идеальной зубной дуги и, соответственно, окклюзии может зависеть от длины зубной дуги, где длина зубной дуги измеряется как сумма мезиодистальных участков каждого зуба в соответствующей дуге. Согласно реализации, форма идеальной зубной дуги может быть выбрана из эмпирических аналитических кривых или интерполянтов в соответствии с ортодонтическими правилами и диагностикой зубных дуг, полученными вместе с другой информацией о пациенте в ходе шага 220 процесса 200. В частности, понимание длины окклюзионной дуги или ее сегментов позволяет делать предположения относительно форм окклюзионной дуги и расстояний между контрольными точками зубов на основании индекса Понта, индекса Тонна, анализа Болтона и индекса Корнхауса, среди прочих. В этой связи и в качестве примера эти взаимосвязи могут быть определены как

и/или
 .
.
Как сказано, мезиодистальные измерения каждого зуба внутри каждой зубной дуги могут быть оценены для определения обоснованности каждой формы дуги. Подобные формы окклюзионных дуг представлены в ФИГ. 12А-12D, соответственно.
[00106] Чтобы начать более подробное описание подпроцесса 240 процесса 200, цифровая зубная модель и контрольные точки зубов, включая анатомические особенности зубов и контактные точки, вычисленные в ходе предыдущих подпроцессов, могут быть использованы в ходе шага 1041, чтобы сгенерировать идеальные верхнюю и нижнюю зубные дуги. Как представлено выше, оптимизация формы идеальной зубной дуги выполняется на основании, как минимум, вводных данных и вводных ограничений относительно межзубного пространства (т.е. подгонка кривой). Например, вводные данные могут включать в себя контрольные точки зубов, включая локальные оси каждого зуба, установленную форму дуги, межзубные расстояния и прочее, где вводные данные служат точками отсчета и геометрическими параметрами для создания новой формы. Кроме того, как уже было сказано, каждая форма идеальной зубной дуги может быть выбрана из списка построенных эмпирическим путем дуг или интерполянтов в соответствии с правилами, ортодонтическими рекомендациями и диагностикой зубной дуги. В сложных случаях, когда, например, оптимизация неспособна найти решения, используя установленные параметры, установленные параметры и даже методы оптимизации могут быть изменены автоматически или вручную оператором системы.
[00107] Как указано выше, может случиться так, что, принимая во внимание пересечения зубов и прочего, добиться идеальной зубной дуги невозможно, и поэтому она не является подходящей искомой зубной дугой. Поэтому после того, как идеальная зубная дуга, основанная на анатомических особенностях и контактных точках зубов, сгенерирована в ходе шага 1041 подпроцесса 240, эта сгенерированная идеальная зубная дуга подвергается оценке, чтобы определить ее применимость. В частности, может быть определено, достижимо ли идеальное положение, как описано в примере на ФИГ. 11, без пересечения соседних зубов.
[00108] Соответственно, в ходе шага 1042 подпроцесса 240 могут быть проанализированы возможные пересечения зубов идеальной зубной дуги. Для обнаружения числа пересечений моделей могут быть использованы быстрые детекторы возможных пересечений и более медленные методы нахождения пересечений в трехмерных моделях зубов. Если количество обнаруженных пересечений моделей меньше, чем предварительно установленное пороговое значение, сгенерированная идеальная зубная дуга считается возможной, и подпроцесс 240 переходит к шагу 1045, в рамках которого сгенерированная идеальная зубная дуга выбирается как искомая зубная дуга для последующей обработки, связанной с лечением. Однако, если количество обнаруженных пересечений моделей превышает предварительно установленное пороговое значение, сгенерированная идеальная зубная дуга считается невозможной, и подпроцесс 240 переходит к шагу 1043.
[00109] В ходе шага 1043 подпроцесса 240, может быть сгенерирована библиотека возможных, «почти идеальных» зубных дуг или возможных искомых зубных дуг, где каждая возможная искомая зубная дуга является зубной дугой, устраняющей пересечения зубов, найденные в сгенерированной идеальной зубной дуге, а также те пересечения, что были впоследствии сгенерированы в процессе обработки каждой возможной искомой зубной дуги. В этой связи, создание каждой возможной искомой зубной дуги является итерационным, и повторяется многократно по мере того, как обнаруживаются и удаляются пересечения соседних зубов. Описанный более подробно с отсылкой к последующим иллюстрациям поиск пересечений соседних зубов проиллюстрирован на ФИГ. 15. Результатом шага 1043 является набор возможных искомых зубных дуг, которые минимизируют пересечения зубов в процессе приближения к сгенерированной идеальной зубной дуге.
[00110] В ходе шага 1044 подпроцесса 240, каждая из сгенерированных возможных искомых зубных дуг набора оценивается с целью определения самой эффективной возможной искомой зубной дуги. Этот анализ может быть проведен через минимизацию функции издержек или чего-то подобного или может быть основан на наборе пользовательских функций или вложенных функций на основе вышеупомянутых критериев хорошей окклюзии. В случае одной или нескольких вложенных функций, которые могут быть настроены для производства метрики или меры качества «прикуса» или «окклюзии», каждую вложенную функцию можно оценить на уровне отдельно взятого зуба, отдельно взятой зубной дуги или комбинации верхней и нижней зубной дуги. Примеры особенностей, которые могут быть оценены одной или несколькими вложенными функциями, включают в себя: (1) расстояние между контрольными точками зубов (т.е. анатомические особенности зубов, контактные точки и подобное); (2) наклон каждого зуба; и (3) форму окклюзионной дуги.
[00111] В реализации и как представлено выше, метрика может быть оценена с точки зрения качества «прикуса» на уровне отдельно взятого зуба. В этом случае вложенная функция может произвести серию операций. Сначала, как в примере, может быть вычислено расстояние от текущего положения зуба до искомого положения, принимая во внимание текущие параметры ротации и корпусного перемещения зуба в глобальной системе координат, что приводит к созданию матриц преобразования для местной системы координат зуба. После этого могут быть определены весовые индикаторы для каждого из параметров отдаленности положения, где весовые индикаторы назначаются для каждой ротации вокруг каждой оси и осевого перемещения в местной системе координат зуба. И, наконец, из этого вычисляется метрика или статистическая метрика. Статистическая метрика может быть усредненной величиной, как в примере.
[00112] В реализации и как представлено выше, метрика может быть оценена с точки зрения качества «прикуса» на уровне отдельно взятой зубной дуги. В этом случае вложенная функция может произвести серию операций. Сначала, как в примере, могут быть рассчитаны (а) расстояние между текущим положением контрольных точек каждого зуба и идеальным положением соответствующих контрольных точек каждого зуба и (б) расстояние между текущим положением контрольных точек каждого зуба и текущим положением соответствующих контрольных точек соседних зубов. Затем, весовые индикаторы для каждого из параметров расстояния и положения могут быть определены, где весовые индикаторы назначаются для каждого (а) расстояния между текущим положением контрольных точек каждого зуба и идеальным положением соответствующих контрольных точек каждого зуба и (б) расстояния между контрольным точками каждого зуба и текущим положением соответствующих контрольных точек соседних зубов. И, наконец, из этого вычисляется метрика или статистическая метрика. Статистическая метрика может быть усредненной величиной, как в примере.
[00113] В реализации и как представлено выше, метрика может быть оценена с точки зрения качества «прикуса» на уровне рта, включая в себя обе зубных дуги. В этом случае вложенная функция может произвести серию операций. Сначала может быть рассчитано расстояние, описывающее текущее относительное положение между анатомическими особенностями зубов во рту, принимая во внимание идеальное относительное положение между анатомическими особенностями зубов во рту, где расстояние частично определяется существующим ортодонтическим знанием. К примеру, расстояние может быть расстоянием между медиально-язычным бугорком первого верхнего моляра и мезио-дистальной фиссурой противостоящего первого нижнего моляра, где искомое отношение между ними является нулевым расстоянием (отражающим контакт между этими зубами). Расстояние также может быть расстоянием между медиально-язычным скатом и дистально-щечным скатом верхнего клыка и дистально-щечным скатом и медиально-щечным скатом соответствующих зубов-антагонистов, где соответствующие зубы-антагонисты - это клык и первый премоляр, а искомое отношение между ними является нулевым расстоянием (отражающим контакт между этими зубами). В другом случае, расстояние может быть величиной наложения между верхними и нижними резцами, где искомое отношение между ними - это длина наложения, соответствующая 1/3 высоты коронки верхних резцов. В еще одном случае, расстояние может быть углом наклона между передними резцами, где искомое отношение между ними соответствует углу наклона в размере 139°. После этого определяются весовые индикаторы для каждого параметра отдаленности положения, и, наконец, из этого вычисляется метрика или статистическая метрика. Статистическая метрика может быть усредненной величиной, как в примере.
[00114] Описанные выше статистические метрики могут быть схожим образом сгенерированы со ссылкой на ФИГ. 14 для каждого этапа движения зубов и/или каждой фазы движения зубов. Например, в ходе каждой фазы движения зубов идеальные положения, упомянутые выше, могут быть модифицированы с учетом искомых промежуточных положений зубов. В таком случае, искомые промежуточные положения зубов могут стать реальным идеальным положением. Таким образом, стоит помнить, что оценка качества «прикуса» может повлиять на выбор подходящего движения зубов в рамках каждой фазы.
[00115] С учетом любой из вложенных функций, предложенных выше, шаг 1044 определяет, какая из набора сгенерированных возможных искомых зубных дуг минимизирует вложенную функцию или сокращает окончательную метрику вложенной функции ниже предопределенного порогового значения или увеличивает ее выше этого значения. В этой связи, в ходе шага 1045 подпроцесса 240 самая эффективная возможная искомая зубная дуга может быть выбрана в качестве искомой зубной дуги для обработки, связанной с последующим лечением.
[00116] Согласно реализации, ФИГ. 13 иллюстрирует результат описанного выше поиска искомой зубной дуги, контрольных точек зубов (т.е. анатомических особенностей и контактных точек зубов) и движений зубов для достижения искомой зубной дуги.
[00117] Согласно реализации, каждая возможная зубная дуга, включая выбранную искомую зубную дугу, может быть вычислена СПОЛ автоматически, а в более сложных случаях может быть вычислена вручную под контролем оператора системы.
[00118] Согласно реализации, этапы движения зубов, описанные в соответствии с ФИГ. 14, могут быть основаны на выбранной искомой зубной дуге или искомых промежуточных положениях зубов в ней. Кроме того, выбранная форма искомой зубной дуги может быть использована для прогнозирования лечения.
[00119] Следует понимать, что подпроцесс 240 процесса 200 обеспечивает набор преимуществ по сравнению с другими методами. В результате исчезает необходимость в зависящих от лечения данных для определения искомой зубной дуги. В частности, СПОЛ использует двухмерные данные и/или трехмерные модели зубов, сгенерированные до лечения, что позволяет основывать план ортодонтического лечения на исходном состоянии пациента, из которого определяются контрольные точки зубов.
[00120] Возвращаясь к иллюстрациям, после того как была идентифицирована искомая зубная дуга или искомые зубные дуги пациента, необходимо определить движения зубов, чтобы произвести движение из первоначального положения к искомой зубной дуге. Сейчас будет описан подпроцесс 250 процесса 200 с отсылкой к ФИГ. 14. В основном, подпроцесс 250 включает в себя получение выбранной искомой зубной дуги из подпроцесса 240 и определение фаз движения из исходного положения в искомое. Согласно реализации, каждую фазу движения зубов можно описать как промежуточное положение зубной дуги, определяющее искомые промежуточные положения зубов с учетом ортодонтических ограничений, которые могут быть общими или конкретными для этого пациента. Подобного рода ортодонтические ограничения, применимые к фазе, могут включать в себя указание «нельзя одновременно передвигать три соседних зуба», в то время как ортодонтическое ограничение, применимое к движению каждого зуба с зубной дугой, может включать в себя указание «капа не может двигать зуб более, чем на 250 микрон». Информация об ортодонтических ограничениях, промежуточных положениях каждого зуба и течении лечения может храниться в базе данных и использоваться для наблюдения за состоянием пациента, прогнозирования состояния пациента и/или коррекции схемы ортодонтического лечения пациента в реальном времени. Следует понимать, что подобного рода процессы могут производиться и для искомой верхней зубной дуги, и для искомой нижней зубной дуги.
[00121] Говоря более конкретно, подпроцесс 250 процесса 200 начинается с шага 1451. В ходе шага 1451 могут быть подготовлены трехмерные данные, основанные на извлеченных контрольных точках зубов и полученных медицинских изображениях. Это может включать в себя модификацию данных, связанных с каждым зубом, так, чтобы локальные базы (т.е. оси) были трансформированы, чтобы стать частью единой глобальной системы координат. Единая система координат создает систему обратной связи, в рамках которой любые отклонения в положениях зубов вследствие ожидаемых пересечений зубов, могут быть определены с учетом конкретной задачи движения (т.е. искомого положения искомой зубной дуги). Подготовленные трехмерные данные отражают исходное положение соответствующей искомой зубной дуги и могут включать в себя, как в примере, полигональные модели зубов, схожие с моделями искомой зубной дуги с иллюстрации на ФИГ. 13.
[00122] В ходе шага 1452 подпроцесса 250, количество необходимых фаз движения зубов может быть определено на основании разницы между вводными исходными положениями и выбранными искомыми положениям зубных рядов и с учетом ортодонтических ограничений движения, подобных описанным выше. Как было представлено ранее, каждая фаза движения зубов может определять промежуточное положение зубов.
[00123] Определив количество фаз движения зубов, требующихся для достижения искомой зубной дуги, и, в соответствии с этим, количество промежуточных положений зубов, можно рассчитать в каждой фазе и для каждого зуба каждого зубного ряда верхней и нижней зубных дуг один или несколько путей, а затем выбрать из их числа оптимальный. Каждый из рассчитанных путей может включать в себя один или несколько этапов движения, где каждый этап движения зубов отражает одну траекторию или вектор постепенного движения каждого зуба в сторону промежуточного положения.
[00124] В этой связи, начиная с шага 1453 подпроцесса 250, можно рассчитать один или несколько возможных путей для первого зуба зубного ряда в ходе первой фазы движения зубов. Один или несколько путей могут быть рассчитаны таким образом, что первый зуб может быть передвинут в первое промежуточное положение из исходного положения в ходе первой фазы движения зубов, где один или несколько путей описывают все возможные пути, которыми первый зуб может достичь первого промежуточного положения. Такие же расчеты могут быть проведены для оставшихся зубов зубных рядов для первой фазы движения зубов. Один или несколько путей могут быть рассчитаны с учетом ортодонтических правил поворотного и линейного перемещения, где эти расчеты проводятся с помощью углов Эйлера и кватернионов. Ограничения по скорости и траектории могут быть приняты во внимание как производные из ортодонтических правил для диапазонов углов/движений и числа передвигаемых зубов в зависимости от сложности курса лечения. Кроме того, контроль угловых перемещений в локальной системе координат проводится с помощью углов Эйлера и кватернионов, где преобразования делятся на ортодонтические перемещения и вращения.
[00125] Результатом вычислений является дерево возможных путей зубов для первой фазы движения зубов. Каждый вычисленный путь для каждого зуба ведет к созданию новой ветки и/или листа на дереве возможных движений. В реализации, алгоритм выращивает на дереве новые ветви при необходимости, и тупиковые ветки могут быть обрезаны, чтобы сэкономить вычислительные ресурсы. В этой связи дерево возможных путей имеет между ветками и листьями узлы, где каждый узел - это структура данных, состоящая из нескольких элементов, включая: (1) информацию, описывающую возможный путь, (2) траектории пути или траектории для каждого зуба, (3) критерии оптимизации (т.е. узел может быть выведен в нерабочее состояние для экономии вычислительной мощи, если система посчитает его неоптимальным, в то же время как нерабочий узел может быть активирован, если текущая главная ветка будет квалифицирована как ведущая в тупик). Кроме того, каждый узел дерева возможных путей включает в себя всю информацию требуемую для (1) восстановления пути и (2) создания нового пути.
[00126] В ходе процесса 1454 подпроцесса 250, рассчитанные пути могут быть оценены, чтобы определить, произойдут ли пересечения зубов (т.е. пересечения/столкновения), и проконтролировать, что ортодонтические рецепты и ограничения приняты во внимание. Это включает в себя, как в примере, примерную оценку перекрытий полигональных моделей зубов в дополнение к более тщательной оценке точной трехмерной формы каждого зуба. Подобная оценка проиллюстрирована на ФИГ. 15. Как на ФИГ. 15, ограничительная рамка и/или другая быстрая оценка возможных перекрытий используются лишь для первоначальной проверки столкновений. Подобная первоначальная проверка может указать на пересекающиеся области зубов 1549 и непересекающиеся области зубов 1548. Более тщательные оценки точных трехмерных форм каждого зуба включают в себя использование функций коррекции/штрафа и критериев оптимизации. Если в ходе шага 1454 подпроцесса 250 найдены пересечения зубов, траектории нового пути могут быть рассчитаны в ходе шага 1455 подпроцесса 250 и добавлены к дереву возможных путей в виде веток и/или листьев сообразно обстоятельствам.
[00127] Согласно реализации, при идентификации пересечений зубов в ходе шага 1454 подпроцесса 250 может быть изначально определенно, что избегнуть пересечений зубов невозможно. В результате, для устранения подобных пересечений зубов могут быть задействованы несколько методов, как поодиночке, так и вместе. Подобные методы могут включать в себя алгоритмические стратегии поиска, такие как (1) поиск в глубину с коррекцией истории процесса на предыдущей траектории пути и (2) переход к более раннему состоянию системы движения зубов без удаления еще не протестированных веток. В свою очередь, эти методы могут включать в себя клиническую стратегию, такую как (3) расширение зубного ряда. Другие клинические стратегии включают в себя интерпроксимальное иссечение эмали (ИИЭ) и прочее. В этой связи может быть измерена толщина созданной ограничительной рамки пересечения двух зубов, как на ФИГ. 15. Если толщина находится в пределах приемлемого ИИЭ-порога, где приемлемый ИИЭ-порог уникален для каждого зуба и хранится внутри базы данных, пересечение двух зубов может быть записано как приемлемое. Однако, если толщина находится за пределами приемлемого ИИЭ-порога, можно провести процедуру ИИЭ. Каждый вышеописанный метод решает проблему пересечения зубов, делая возможным появление новых веток и/или листьев на дереве возможных путей.
[00128] После создания дерева возможных путей с учетом возможных пересечений зубов в ходе шага 1456 подпроцесса 250 список приемлемых путей может быть сгенерирован в виде завершенного дерева возможных путей. Каждый приемлемый путь из списка приемлемых путей может быть оптимизирован в соответствии с ортодонтическими правилами и с целью минимизации количества этапов движения зубов и числа индивидуальных движений зубов в них.
[00129] Описанные выше шаги 1453-1456 могут быть повторены для каждой фазы движения зубов, определенной в ходе шага 1452.
[00130] В ходе шага 1457 подпроцесса 250, список приемлемых путей или завершенное дерево возможных путей может быть оценено с целью выбора пути лечения. Согласно реализации может быть произведен поиск оптимального пути в дереве возможных путей. Подобный поиск может включать в себя оценку эффективности и точности. К примеру, может быть выбран путь, позволяющий достичь искомого положения зубного ряда, а дополнительные пути при этом удалены из дерева возможных путей. В другом примере, может оказаться, что ни один из путей не позволяет достичь искомого положения зубного ряда из-за пересечений зубов или ортодонтических ограничений. В этом случае можно провести поиск по дереву возможных путей и выбрать путь, который минимизирует функцию издержек. В данном примере функция издержек может быть мерой качества окклюзии или количеством этапов движения зубов. Качество окклюзии может быть оценкой качества «прикуса», как было ранее описано в связи с шагом 1044 подпроцесса 240.
[00131] Согласно реализации, в том, что касается сложных случаев, шаги 1453-1457 подпроцесса 250 могут быть произведены для каждой фазы лечения зубов, и результаты этих шагов могут быть использованы для формирования возможных путей для последующей фазы лечения зубов.
[00132] Согласно реализации, ФИГ. 16А и ФИГ. 16В иллюстрируют трехмерные модели верхней зубной дуги до и после ортодонтического лечения соответственно.
[00133] Согласно реализации, следует понимать, что описанный выше процесс автоматизированного планирования лечения может быть разделен на три основных процесса: (1) идентификация контрольных особенностей каждого зуба, (2) определение искомого положения для каждого зуба и (3) нахождение эффективного и точного пути от первоначального положения к искомому положению каждого зуба. Эти процессы будут описаны ниже в той мере, в которой это может быть применимо к СПОЛ в реализации настоящего изобретения.
[00134] В ходе первого процесса может быть определено искомое положение зуба. Используя трехмерные модели поверхностей, описанные сетью (как на ФИГ. 7А-7Е), или волюметрические (volumetric) модели, можно определить анатомические особенности зубов, и на этом основании вычислить искомые положения зубов. В соответствии с примером, анатомическими особенностями зубов могут быть контрольные точки зубов, вычисленные в ходе подпроцесса 230 процесса 200. Затем, согласно примеру, искомое положение зуба может быть вычислено через (1) создание метрики, определяющей разницу в положении между анатомическими особенностями или контрольными точками зубов, и (2) минимизацию метрики через использование эвристического метода, включая, в том числе, алгоритм А*, IDA* и другие итерационные методы. Как вариант, искомое положение зуба может быть определено через (1) вычисление оптимального положения между анатомическими особенностями или контрольными точками зуба, основанное на известных анатомических ограничениях, включая, среди прочего, метрику анализа Болтона, форму кривой Шпее и идеальную форму дуги, и (2) обучение математической модели, в соответствии с трехмерными моделями поверхности, описанной сетью, или волюметрическими моделями зуба, чтобы спрогнозировать искомое положение зуба на основании контрольных данных, полученных из обучающего массива данных. Как следует из примера, математическая модель прогнозирования искомого положения может быть статистической моделью, искусственной нейронной сетью или чем-то схожим, основанном на предыдущих пациентах с релевантными, промаркированными анатомическими данными, снятыми до и после ортодонтического лечения. Результаты работы математической модели могут быть получены в разных форматах. Например, математическая модель может быть натренирована предсказывать матрицу преобразования для каждого зуба, где математическая модель обучена обеспечивать сегментацию (т.е. U-nets для двумерной и трехмерной сегментации или PointNet для сегментации поверхностной сетки). Матрица преобразования или матрица движения зубов может быть вектором движения, кватернионом или классом преобразования, выбранным из предварительно заданного списка классов преобразования. Предварительно заданный список классов преобразования может включать в себя такие, как «дистально-мезиальный», «щечно-лингвальный», «кончик», «торк», «вращение», «наклон» и прочее. В другом случае, математическая модель может быть обучена предсказывать форму правильно расположенного зуба, посредством чего может быть получена матрица преобразования. Подобного рода математическая модель может быть глубокой нейронной сетью, такой как генеративно-состязательная нейронная сеть и подобные ей. После предсказания формы правильно расположенного зуба алгоритмы регистрации, такие как итеративный алгоритм ближайших точек, RANSAC и другие, могут быть использованы для получения матрицы преобразования для каждого зуба.
[00135] Вслед за этим, в ходе второго процесса, может быть определен самый эффективный и точный путь. В этой связи методы, нацеленные на определение «кратчайшего пути», могут быть использованы для определения самого эффективного и точного пути каждого зуба в рамках каждой фазы. В данном случае, такие методы как А*, IDA*, алгоритм Джонсона и другие, могут быть использованы для определения пути от первоначального положения к искомому положению или искомому промежуточному положению зуба в каждой фазе. На каждом этапе определенного пути может быть проведена проверка пересечений трехмерных моделей с целью предотвращения пересечений зубов, и, в случае нахождения, другие итерации могут быть произведены для определения новых путей. После этого может быть предсказан путь последующей фазы. В примере, обученная математическая модель может быть использована, чтобы производить описанные выше вычисления. В частности, обученная математическая модель может быть моделью машинного обучения вроде перцептрона с PPO, нейронными сетями с обратной связью, моделями Маркова, методами опорных векторов, байесовскими моделями и прочим. Как и до этого, если предсказанный путь для последующей фазы приводит к пересечению зубов, обученная математическая модель обеспечивает итерационное предсказание, чтобы избежать пересечения зубов. Например, математическая модель обучена содействовать приближению к промежуточному искомому положению зуба или искомому положению зуба.
[00136] Возвращаясь к иллюстрациям и принимая во внимание альтернативные реализации настоящего изобретения, посмотрим на ФИГ. 17, который является иллюстрацией стоматологического снимка зуба. Согласно реализации настоящего изобретения, дерево возможных путей и выбранный путь, являющийся основой схемы ортодонтического лечения, могут быть сгенерированы, исходя из коронки зуба. Кроме того, дерево возможных путей может быть сгенерировано, исходя из полной архитектуры зуба, включая и его коронку, и, как минимум, один корень. Как можно понять, рассмотрение в ходе определения схемы ортодонтического лечения только коронки зуба рискует повредить, как минимум, один корень, периодонтальную связку или периодонтальную кость при движении из первоначального в искомое положение. Чтобы при планировании ортодонтического лечения включить в анализ информацию, относящуюся к окружающим зуб мягким и твердым тканям, требуется метод идентификации вида ткани, создания посредством этого трехмерной модели и определения соответствующих характеристик периодонтальной ткани. В этой связи появляется необходимость разработки стратегии распознавания мягких и твердых тканей, корней зубов и окружающих костей различной плотности. ФИГ. 17 является иллюстрацией стоматологического снимка зуба в соответствии с реализацией настоящего изобретения. При реализации стоматологический снимок зуба может, помимо прочего, быть снимком, полученным с помощью внутриротовой оптической визуализации, слепков, зубных моделей, УЗИ или рентгенографии, как было описано выше. Например, множество снимков или слоев может быть получено с помощью рентгенографии и затем воспроизведено для создания трехмерной модели. В контексте ФИГ. 17, зуб 1704 состоит из коронки 1706 и одного или нескольких корней 1705. Один или несколько корней 1705 расположены в альвеолярном отростке, утолщенном гребне кости, в котором находятся зубные ячейки или лунки. Альвеолярный отросток состоит из твердой и сравнительно плотной кортикальной кости 1715 и сравнительно пористой губчатой кости 1710. Вместе, кортикальная кости 1715 и губчатая кость 1710 обеспечивают крепкое основание, к которому прикреплены один или несколько корней 1705 зуба 1704. В том, что касается настоящего изобретения, кортикальная кость 1715 и губчатая кость 1710 как периодонтальные ткани играют свою роль в определении возможных движений зуба.
[00137] При планировании движений зуба так, чтобы одновременно принимались во внимание и зуб, и периодонтальное пространство, необходимо идентифицировать множество структур, включая описанные выше. Более того, после того, как эти особенности идентифицированы для одного двухмерного стоматологического снимка, то же самое можно сделать для дополнительных двухмерных стоматологических снимков или слоев до получения на их основе трехмерной модели. Помимо обеспечения эстетической оценки, трехмерная модели синтезирует информацию относительно плотности и толщины периодонтальных тканей, тем самым ограничивая возможные движения зуба и обеспечивая назначающего лечение медицинского специалиста инструментом, с помощью которого можно определить возможные диапазоны движения зуба.
[00138] В частности, метод подобной идентификации корня 1705 зуба 1704 как отдельного от коронки был ранее описан авторами настоящего изобретения в заявке на патент США №16/017, 687, которая включена в данный текст путем отсылки.
[00139] В дополнение к идеям заявки на патент США №16/017,687, для идентификации как минимум одного корня 1705 зуба 1704 и коронки 1706 того же зуба может быть использован метод, основанный на машинном обучении. В частности, метод, основанный на машинном обучении, может быть комбинацией искусственных нейронных сетей для нахождения и сегментации одного или нескольких медицинских изображений. В этой связи комбинация искусственных нейронных сетей может включать в себя искусственную нейронную сеть, например, RetinaNET и подобные ей, чтобы определить наличие зубов на одном или нескольких медицинских изображениях. Одно или несколько медицинских изображений могут быть двухмерными слоями изображения или трехмерными объемами изображения или поверхностными сетками. Искусственная нейронная сеть может быть обучена обособлять каждый зуб в рамку. Впоследствии, трехмерная и полностью сверточная нейронная сеть, такая как U-net и подобные ей, может быть обучена проводить сегментацию ограниченных ячеек, где сегментация идентифицирует искомые ткани в пределах зуба, в частности, как минимум, один корень 1705 и коронку 1706.
[00140] Согласно реализации комбинированные обученные нейронные сети могут обрабатывать одно или несколько медицинских изображений одинаковым способом. Например, комбинированные искусственные нейронные сети могут получать в качестве вводных объемные медицинские изображения зубных дуг или расположения зубов пациента. Каждый зуб на зубной дуге может быть обособлен от объемного медицинского изображения искусственной нейронной сетью. После этого, к обособленному зубу можно применить трехмерную полностью сверточную нейронную сеть для его сегментации. И, наконец, сегментированные объемы могут быть сконвертированы в полигональные меш-модели, которые могут быть интегрированы в систему планирования ортодонтического лечения, такую как СПОЛ из настоящего изобретения, где сегментированные объемы выделяют, какие области зуба являются корнем, а какие коронкой, что позволяет планировать движения зуба с учетом биологических ограничений соответствующих видов тканей.
[00141] Однако, следует принимать во внимание, что одно или несколько медицинских изображений пациента могут быть недоступны и поэтому метод глубокой нейронной сети, такой как генеративно-состязательная нейронная сеть или нечто похожее, может быть использован для создания поверхностных моделей как минимум одного корня зуба и его коронки.
[00142] Теперь мы дадим описание оборудования системы планирования ортодонтического лечения (СПОЛ) в соответствии с примерными реализациями. Подобное оборудование описано в контексте ФИГ. 18. На ФИГ. 18 СПОЛ включает в себя центральное процессорное устройство (ЦПУ) 1880, которое исполняет процессы, описанные выше и ниже. В другой реализации, обрабатывающим устройством может быть графический процессор (GPU), графический процессор общего назначения (GPGPU) или тензорный процессор (TPU). Данные и указания для процесса могут храниться в памяти 1881. Эти процессы и указания также могут храниться на информационном носителе 1882, таком как жесткий диск (HDD) или переносной накопитель, или же могут храниться удаленно. При этом, заявленные усовершенствования не ограничены машиночитаемыми носителями, на которых хранятся указания относительно процесса создания изобретения. Указания могут храниться на CD, DVD, флеш-ПЗУ, RAM, ROM, PROM, EPROM, EEPROM, жестком диске или любом другом устройстве обработки информации, с которым обменивается данными СПОЛ, например, сервером или компьютером.
[00143] В свою очередь, заявленные усовершенствования могут предоставляться как утилита, выполняющий системную задачу фоновый процесс или компонент операционной системы или их комбинация, работающие сообща с ЦПУ 1880 и операционной системой, например, Microsoft Windows 7, Windows 8, Windows 10, UNIX, Solaris, LINUX, Apple MAC-OS и другими системами, известными специалистам в этой области.
[00144] Аппаратные компоненты, необходимые для создания СПОЛ, могут использовать различные элементы вычислительной схемы, известные специалистам в этой области. Например, ЦПУ 1880 может быть процессором Xeon или Core от американской компании Intel или процессором Opteron от американской компании AMD или каким-либо другим процессором, известным специалистам обычной квалификации в этой области. Как вариант, ЦПУ 1880 может быть внедрено на ППВМ, специализированных микросхемах, ПЛИС или с использованием микросхем дискретной логики, как понятно специалистам обычной квалификации в этой области. Кроме того, ЦПУ 1880 может быть внедрено как множественные процессоры, совместно работающие параллельно друг другу, исполняя указания описанных выше процессов изобретения.
[00145] СПОЛ на ФИГ. 18 также включает в себя сетевой контроллер 1883, например, сетевую карту Intel Ethernet PRO от американской корпорации Intel, используемый для соединения с сетью 1895. Как можно понять, сеть 1895 может быть публичной сетью, такой, как интернет, или частной сетью, такой как LAN или WAN-сеть, или любой их комбинацией, и может также включать в себя подсети PSTN или ISDN. Сеть 1895 также может быть проводной, вроде Ethernet-сети, или же беспроводной, вроде сети сотовой связи, включая беспроводные сотовые системы EDGE, 3G и 4G. Беспроводная сеть также может быть сетью WiFi, Bluetooth® или любой другой известной формой беспроводных коммуникаций.
[00146] Кроме того, СПОЛ включает в себя контроллер дисплея 1884, например, NVIDIA GeForce GTX® или адаптер графики Quadro® от американской корпорации NVIDIA, для связи с дисплеем 1885, например, ЖК-монитором Hewlett Packard HPL2445w®. Интерфейс ввода-вывода общего назначения 1886 взаимодействует с клавиатурой и/или мышкой 1887, а также с сенсорной экранной панелью 1888, расположенной на дисплее 1885 или отдельно от него. Интерфейс ввода-вывода общего назначения также связан с различными периферийными устройствами 1889, включая принтеры и сканнеры, вроде OfficeJet® или DeskJet® от Hewlett Packard.
[00147] СПОЛ также включает в себя контроллер звука 1890, например, Sound Blaster X-Fi Titanium от компании Creative, позволяющий взаимодействовать с колонками/микрофоном 1891, обеспечивая оператора звуками и/или музыкой.
[00148] Контроллер внешней памяти общего назначения 1892 соединяет информационный носитель 1882 с коммуникационной шиной 1893, которая может быть типа ISA, EISA, VESA, PCI или им подобных, и соединяет между собой все элементы СПОЛ. Описание общих характеристик и функционала дисплея 1885, клавиатуры и/или мышки 1887, а также контроллера дисплея 1884, контроллера внешней памяти 1892, сетевого контроллера 1883, контроллера звука 1890 и интерфейса ввода-вывода общего назначения 1886, не дается здесь ради краткости, так как эти характеристики известны.
[00149] Очевидно, что в свете описанных выше идей, возможны многочисленные вариации и модификации. Таким образом, следует понимать, что в рамках прилагаемой формулы изобретения изобретение может практиковаться способами, отличными от описанного в этом тексте.
[00150] Реализации настоящего изобретения также могут быть такими, как описано в последующих параграфах.
[00151] (1) Метод создания схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента, действующий через извлечение контрольных точек зубов, как минимум, одной зубной дуги пациента из полученных данных пациента, определение на основе извлеченных контрольных точек искомой зубной дуги пациента, вычисление на основе определенной искомой зубной дуги пациента одного или нескольких этапов движения зубов, и формирование с помощью системы, включающей по меньшей мере одно вычислительное устройство, и на основе вычисленных этапов движения зубов схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента.
[00152] (2) Метод, исходя из (1), где извлечение контрольных точек каждого зуба, как минимум, одной зубной дуги пациента включает в себя вычисление изолиний, соответствующих глубине соответствующего зуба на плоскости xOz, формирование вертикальной оси соответствующего зуба на основании вычисленных изолиний, вычисление изолиний, соответствующих глубине соответствующего зуба на плоскости перпендикулярной созданной вертикальной оси, определение одной или нескольких анатомических особенностей зуба, формирование горизонтальной оси соответствующего зуба на основании подмножества определенных анатомических особенностей соответствующего зуба, и определение одной или нескольких контактных точек соответствующего зуба.
[00153] (3) Метод в соответствии с либо (1), либо (2), где определение одной или нескольких анатомических особенностей каждого соответствующего зуба включает в себя вычисление не менее одного режущего края, не менее одного бугорка и не менее одной фиссуры соответствующего зуба.
[00154] (4) Метод в соответствии с любыми из методов от (1) до (3), где вычисление не менее одной фиссуры соответствующего зуба включает в себя определение геометрической области, заданной вычисленным бугорком соответствующего зуба, разделение геометрической области на множество геометрических подобластей, и определение не менее одной фиссуры соответствующего зуба на основе координат множества геометрических подобластей.
[00155] (5) Метод в соответствии с любыми из методов от (1) до (4), где определение искомой зубной дуги пациента включает в себя формирование с учетом пересечений зубов набора возможных зубных дуг и выбор в качестве искомой зубной дуги одной из набора возможных зубных дуг, сокращающей до минимума отличия от идеальной зубной дуги.
[00156] (6) Метод в соответствии с любым из методов от (1) до (5), где вычисление одного или нескольких этапов движения зубов включает в себя определение количества этапов движения зубов, вычисление для каждого зуба на каждом этапе движения зубов с учетом пересечений зубов списка траекторий, пригодных для движения зуба, и выбор для каждого зуба на каждом этапе движения зубов траектории из списка траекторий, максимально сокращающей штраф преобразования.
[00157] (7) Метод в соответствии с любым из методов от (1) до (6), где созданный план ортодонтического лечения для, как минимум, одной зубной дуги пациента включает в себя рецепт на, как минимум, одну ортодонтическую капу на основании выбранной траектории каждого зуба на каждом этапе движения зубов.
[00158] (8) Метод в соответствии с любым из методов от (1) до (7), где извлечение контрольных точек для каждого из зубов, как минимум, одной зубной дуги пациента включает в себя применение классификатора на основе машинного обучения к одному или нескольким изображениям из данных пациента, где классификатор на основе машинного обучения, натренирован на массиве референсных изображений пациентов, где каждое из референсных изображений пациентов массива классифицировано.
[00159] (9) Приспособление для создания схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента, состоящее из системы, включающей по меньшей мере одно вычислительное устройство, настроенной на извлечение контрольных точек зубов, как минимум, одной зубной дуги пациента из полученных данных пациента, определение, на основе извлеченных контрольных точек, искомой зубной дуги пациента, вычисление, на основании определенной искомой зубной дуги пациента, одного или нескольких этапов движения зубов, и формирование, на основании вычисленных этапов движения зубов, схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента.
[00160] (10) Приспособление в соответствии с (9), где для того, чтобы извлечь контрольные точки для каждого из зубов, как минимум, одной зубной дуги пациента, система, включающая по меньшей мере одно вычислительное устройство, дополнительно настроена, чтобы вычислять изолинии, аналогичные глубине соответствующего зуба в плоскости xOz, формировать вертикальную ось соответствующего зуба на основании вычисленных изолиний, вычислять изолинии, аналогичные глубине соответствующего зуба в плоскости, перпендикулярной сформированной вертикальной оси, определять одну или несколько анатомических особенностей соответствующего зуба, формировать горизонтальную ось соответствующего зуба на основании подмножества определенных анатомических особенностей соответствующего зуба, и определять одну или несколько контактных точек соответствующего зуба.
[00161] (11) Приспособление в соответствии либо с (9), либо с (10), где для определения одной или нескольких анатомических особенностей соответствующего зуба, система, включающая по меньшей мере одно вычислительное устройство, дополнительно настроена для вычисления не менее одного режущего края, не менее одного бугорка и не менее одной фиссуры соответствующего зуба.
[00162] (12) Приспособление, соответствующее любому из ряда от (9) до (11), где для определения искомой зубной дуги пациента, система, включающая по меньшей мере одно вычислительное устройство, дополнительно настроена для формирования с учетом пересечений зубов набора возможных зубных дуг и выбора в качестве искомой зубной дуги одной из набора возможных зубных дуг, сокращающей до минимума отличие от идеальной зубной дугой.
[00163] (13) Приспособление в соответствии с любыми из ряда (9)-(12), где для вычисления одного или нескольких этапов движения зубов, система, включающая по меньшей мере одно вычислительное устройство, дополнительно настроена для определения числа этапов движения зубов, вычисления для каждого зуба на каждом этапе движения зубов и с учетом пересечений зубов списка пригодных для движения зуба траекторий и выбор для каждого зуба на каждом этапе движения зубов траектории из списка траекторий, сокращающей до минимума штраф преобразования.
[00164] (14) Приспособление в соответствии с любым из ряда (9)-(13), где для извлечения контрольных точек для каждого из зубов, как минимум, одной зубной дуги пациента, система, включающая по меньшей мере одно вычислительное устройство, дополнительно настроена на применение классификатора на основе машинного обучения к одному или нескольким изображениям из данных пациента, где классификатор на основе машинного обучения натренирован на массиве референсных изображений пациентов, где каждое из референсных изображений пациентов массива классифицировано.
[00165] (15) Предназначенный для долговременного хранения информации машиночитаемый носитель, хранящий машиночитаемые указания, которые, будучи исполненными компьютером, инициируют исполнение метода создания схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента, где данный план состоит из извлечения контрольных точек зубов, как минимум, одной зубной дуги пациента из полученных данных пациента, определения на основании извлеченных контрольных точек искомой зубной дуги пациента, вычисления на основании определенной искомой зубной дуги пациента одного или нескольких этапов движения зубов и формирования на основании вычисленных этапов движения зубов схемы ортодонтического лечения для, как минимум, одной зубной дуги пациента.
[00166] (16) Предназначенный для долговременного хранения информации машиночитаемый носитель в соответствии с (15), где извлечение контрольных точек для, как минимум, одной зубной дуги пациента включает в себя вычисление изолиний, соответствующих глубине соответствующего зуба на плоскости xOz, формирование вертикальной оси соответствующего зуба на основании вычисленных изолиний, вычисление изолиний, соответствующих глубине соответствующего зуба на плоскости, перпендикулярной созданной вертикальной оси, определение одной или нескольких анатомических особенностей зуба, формирование горизонтальной оси соответствующего зуба на основании подмножества определенных анатомических особенностей соответствующего зуба, и определение одной или нескольких контактных точек соответствующего зуба.
[00167] (17) Предназначенный для долговременного хранения информации машиночитаемый носитель в соответствии с (15) или (16), в котором определение одной или нескольких анатомических особенностей соответствующего зуба включает в себя вычисление не менее одного режущего края, не менее одного бугорка и не менее одной фиссуры соответствующего зуба.
[00168] (18) Предназначенный для долговременного хранения информации машиночитаемый носитель в соответствии с любым от (15) до (17), в котором определение искомой зубной дуги пациента включает в себя формирование с учетом пересечений зубов набора возможных зубных дуг и выбор, в качестве искомой зубной дуги, одной из набора возможных зубных дуг, сокращающей до минимума отличие от идеальной зубной дуги.
[00169] (19) Предназначенный для долговременного хранения информации машиночитаемый носитель в соответствии с любым от (15) до (18), где вычисление одного или нескольких этапов зубов включает в себя определение количества этапов движения зубов, вычисление для каждого зуба на каждом этапе движения зубов с учетом пересечений зубов списка пригодных для движения зуба траекторий и выбор для каждого зуба на каждом этапе движения зубов траектории из списка траекторий, снижающей до минимума штраф преобразования.
[00170] (20) Предназначенный для долговременного хранения информации машиночитаемый носитель в соответствии с любым от (15) до (19), где извлечение контрольных точек для каждого зуба, как минимум, одной зубной дуги пациента включает в себя применение классификатора на основе машинного обучения к одному или нескольким изображениям из данных пациента, где классификатор на основе машинного обучения натренирован на массиве референсных изображений пациентов, где каждое из референсных изображений пациентов массива классифицировано.
[00171] Таким образом, вышеизложенное описание раскрывает и описывает лишь примерные реализации настоящего изобретения. Как будет понятно специалистам в этой области, настоящее изобретение может быть реализовано другими конкретными способами, не изменяя при этом своей сущности или важнейшим характеристикам. В свете изложенных выше идей возможны многочисленные вариации и модификации настоящего изобретения. Соответственно, описание настоящего изобретения дается в качестве иллюстрации, но не ограничивает объем, а также притязания изобретения. Описание, включая любые легко различимые варианты содержащихся в нем идей, частично определяет объем терминологии вышеизложенной заявки так, что ничто из описанного изобретения не попадает в общее пользование.
Все публикации, патентные заявки, патенты и другие ссылки, упомянутые в этом тексте, полностью включены в этот документ посредством ссылок. Более того, материалы, методы и примеры даны только для иллюстрации и не претендуют на ограничительную роль, если только не указано обратное.


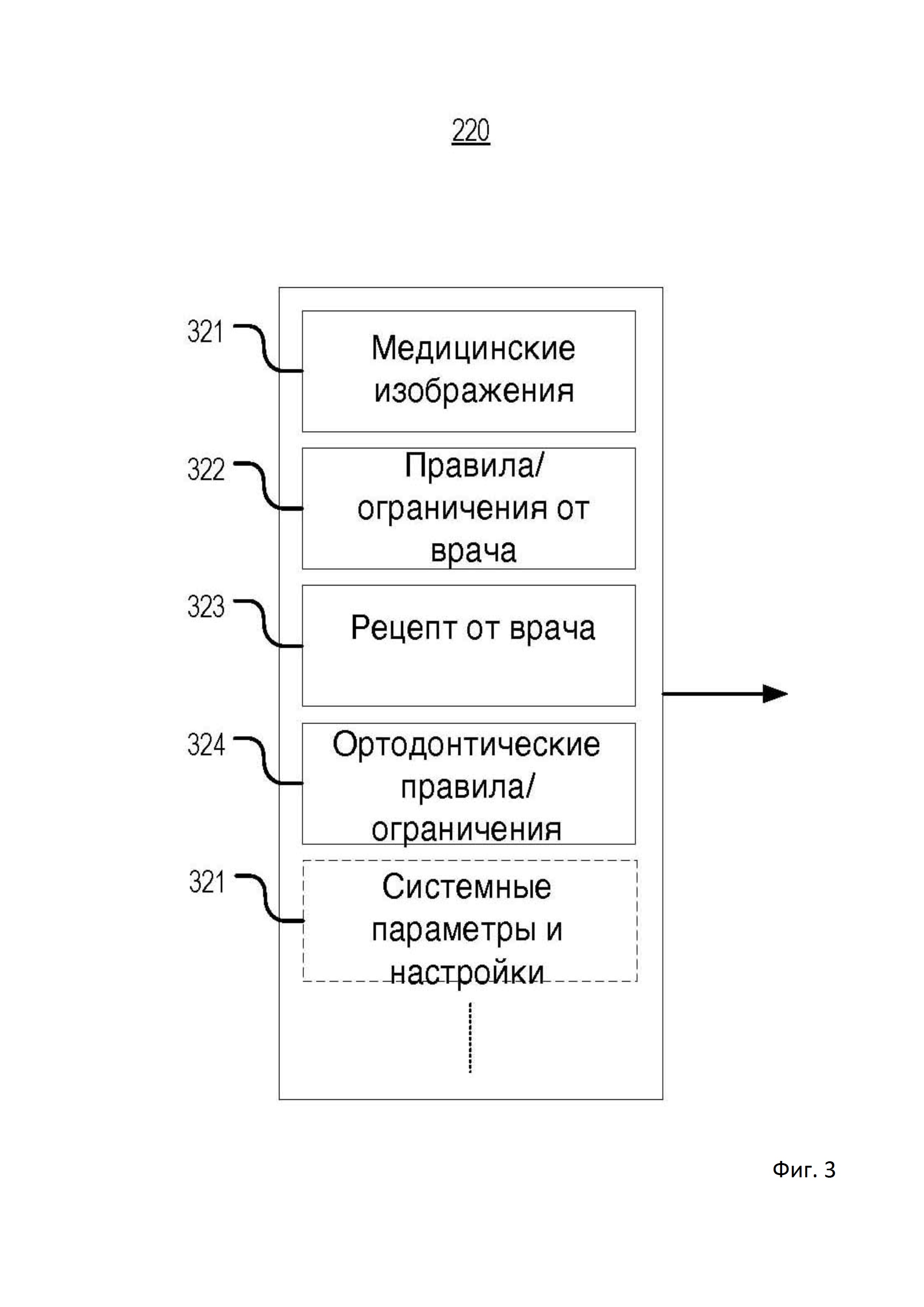
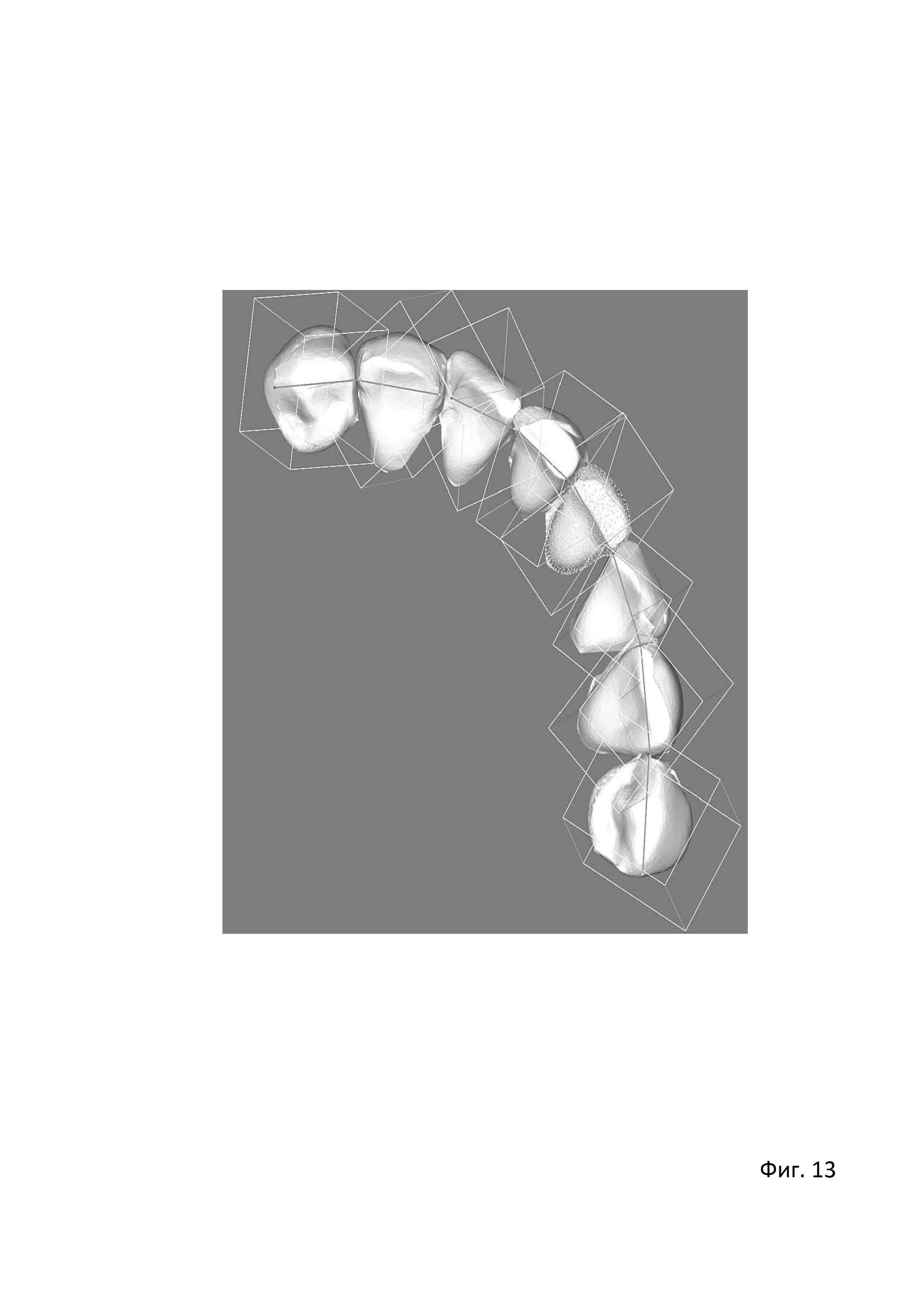
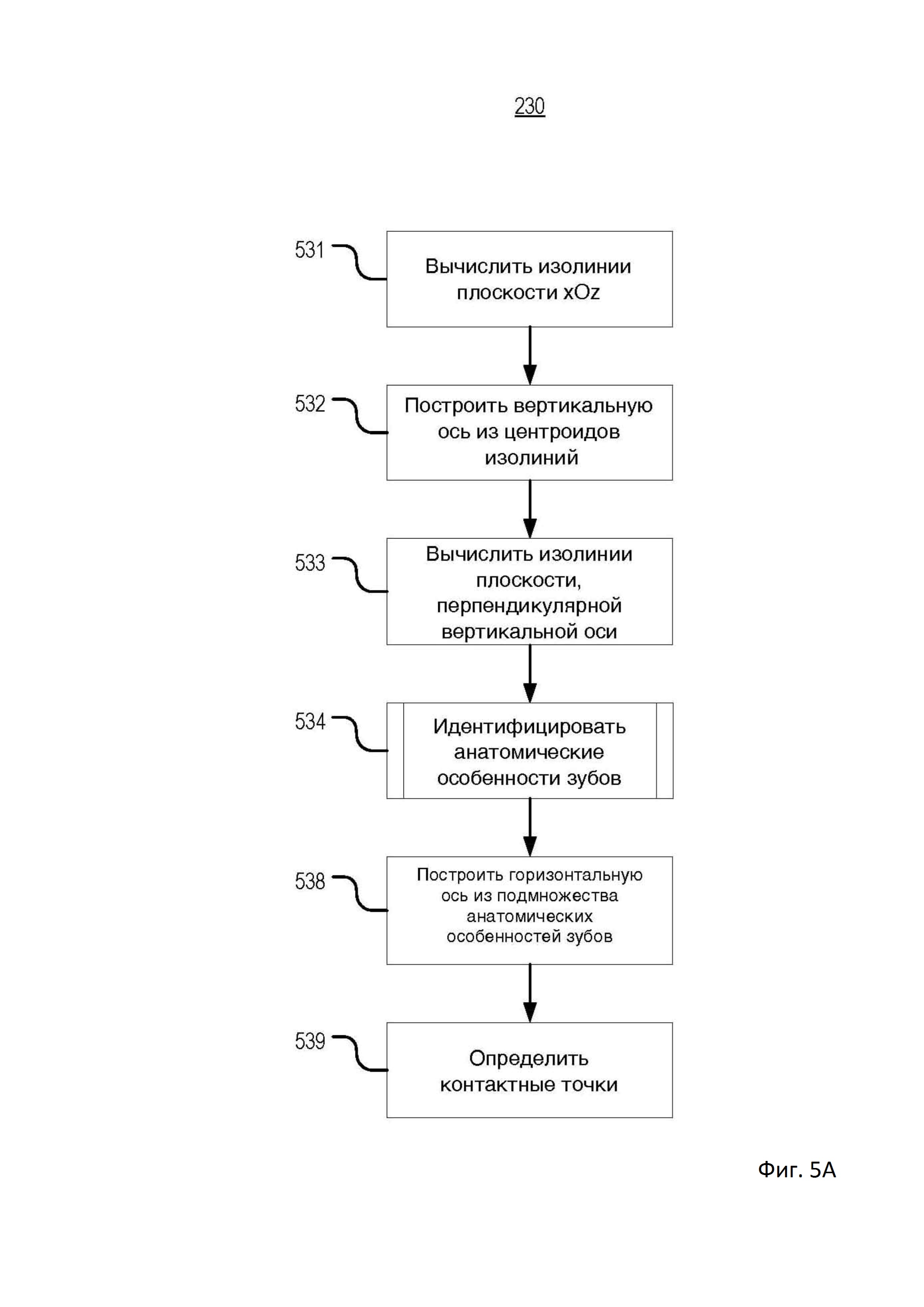
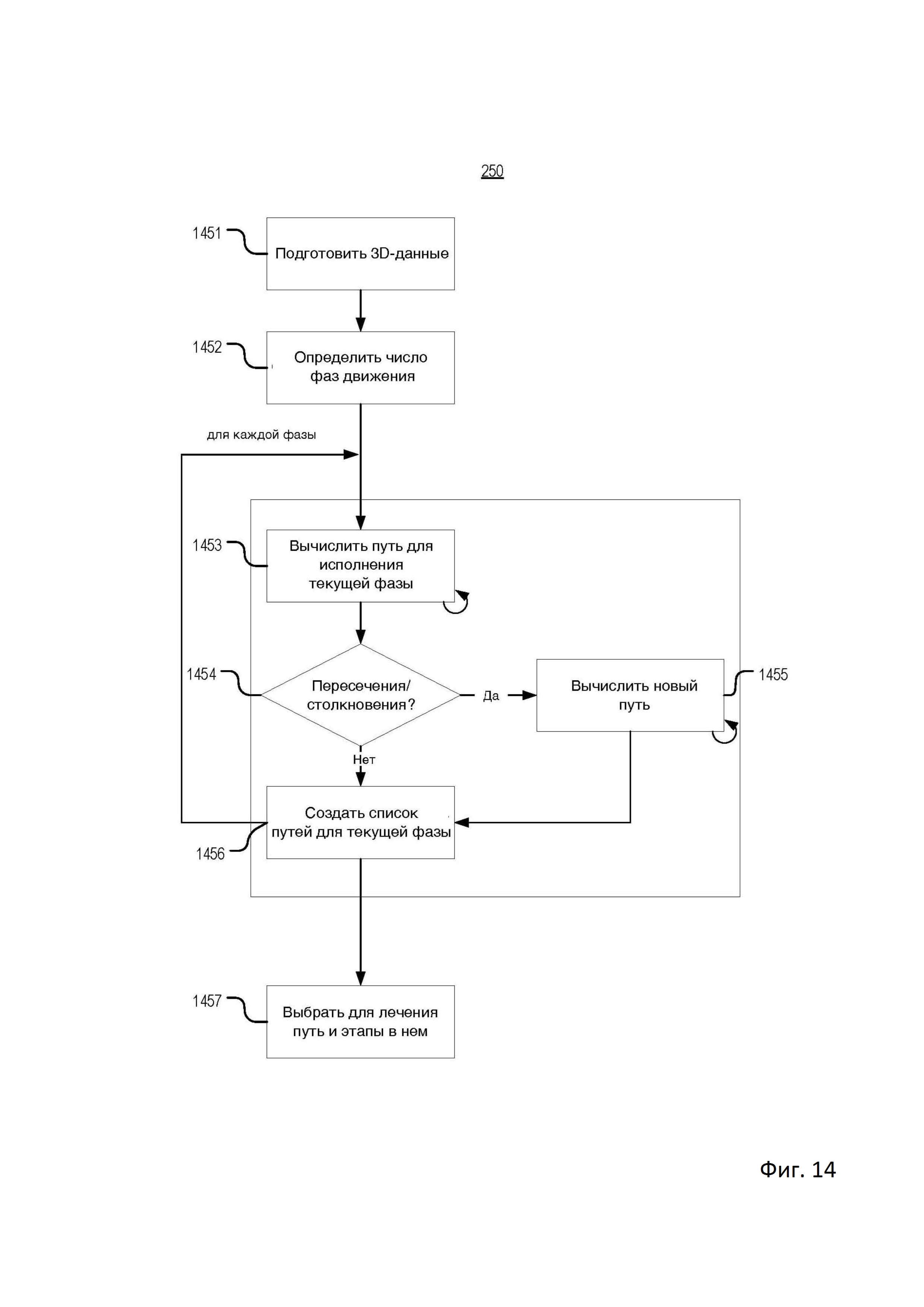
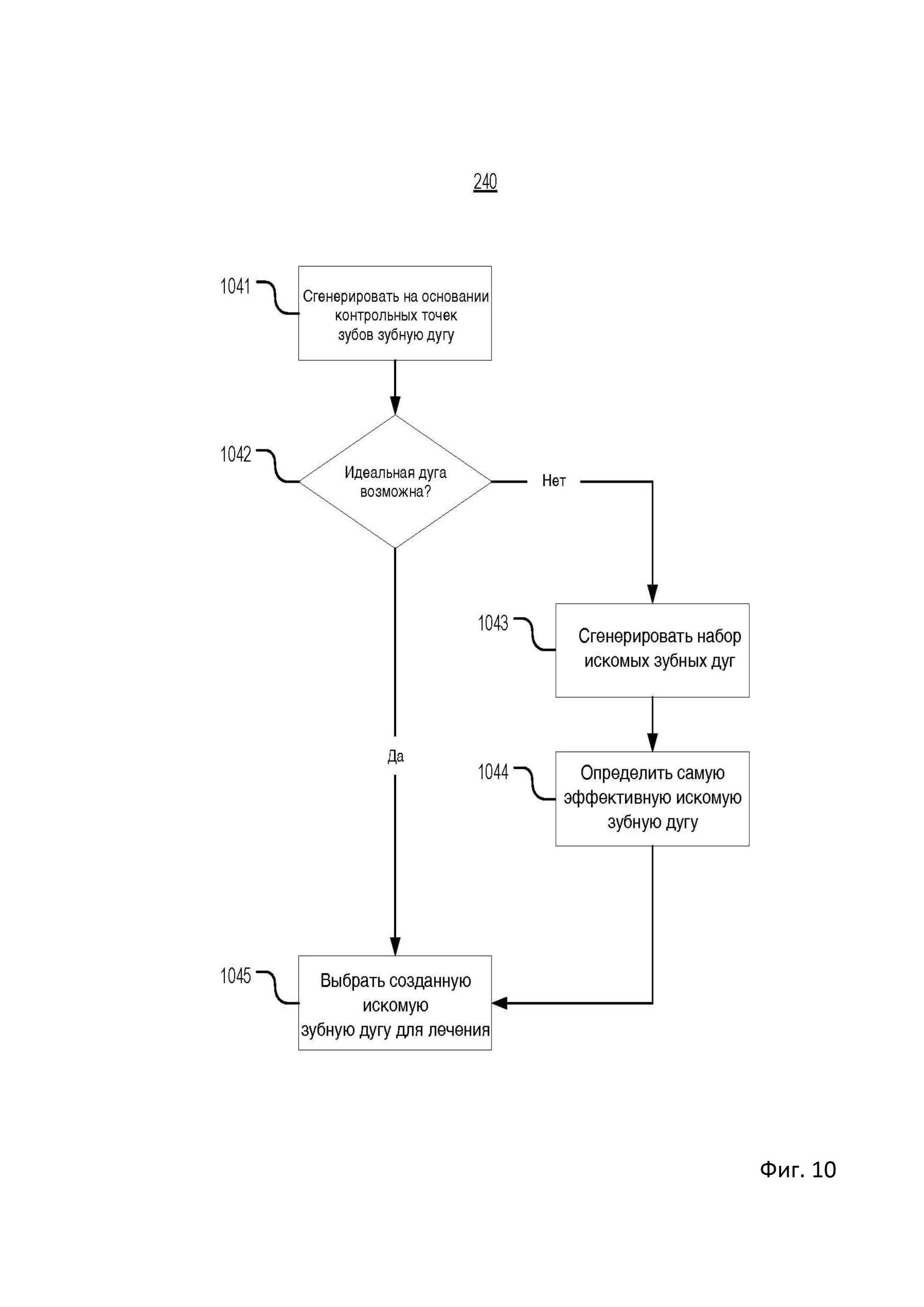
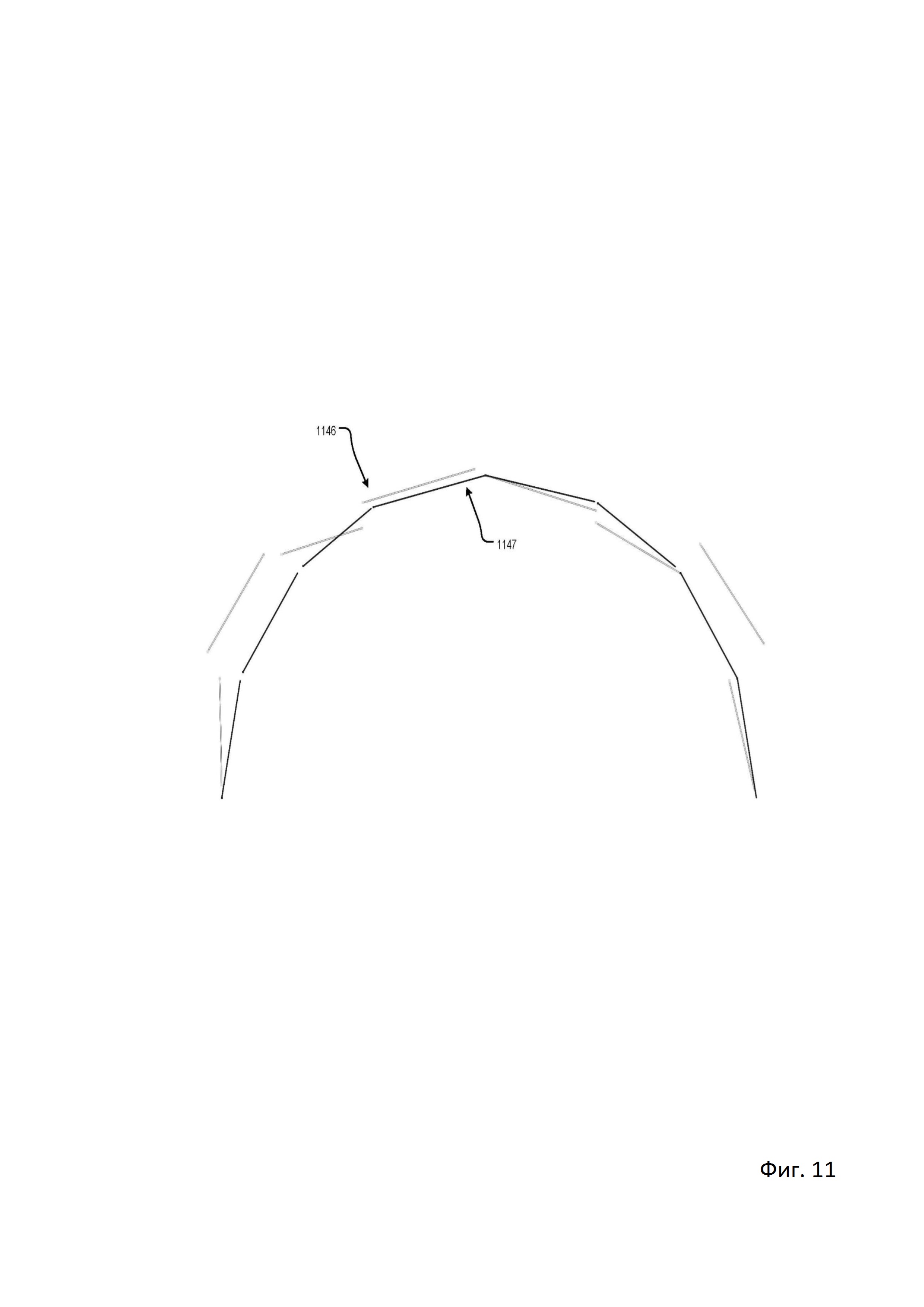
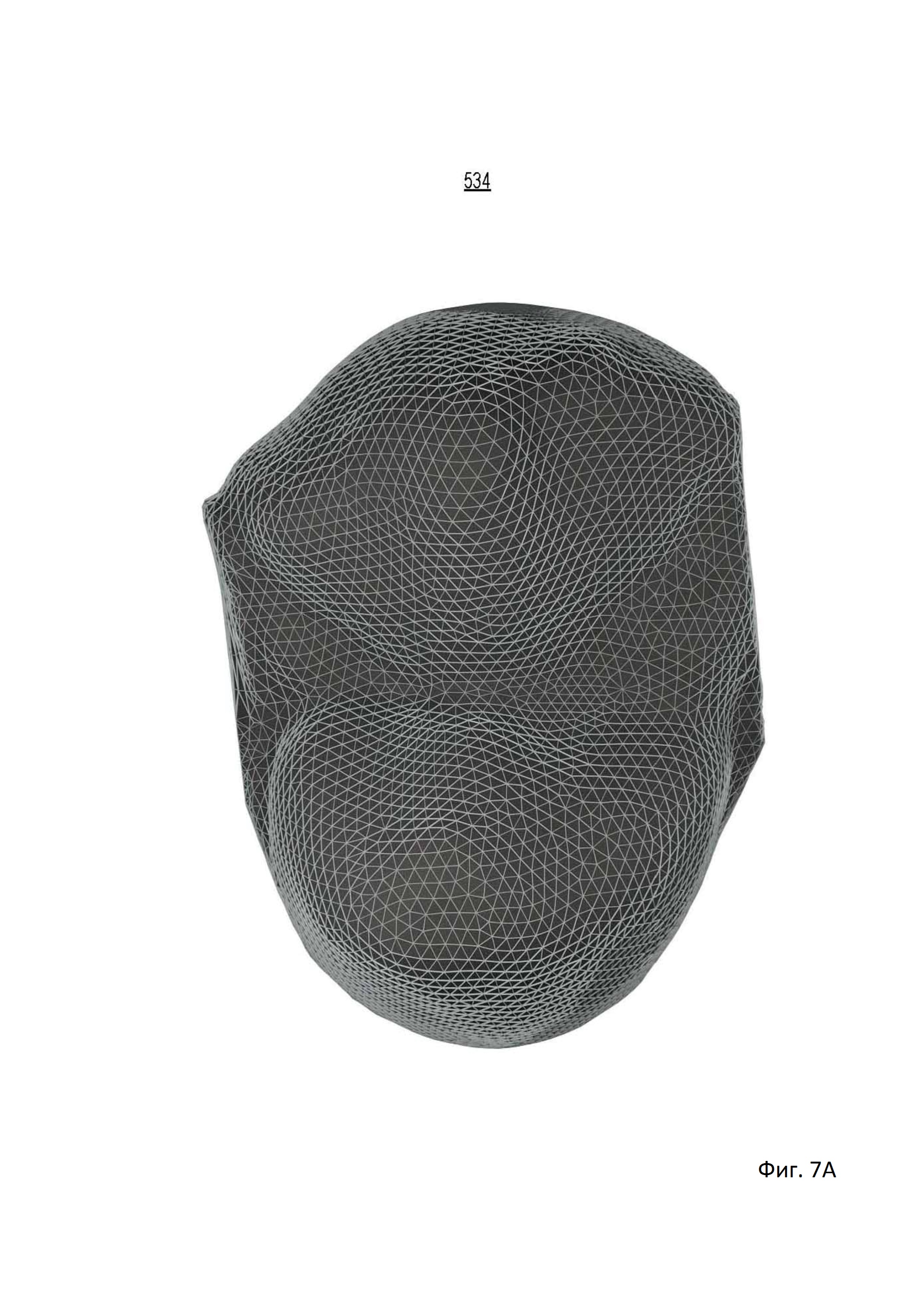
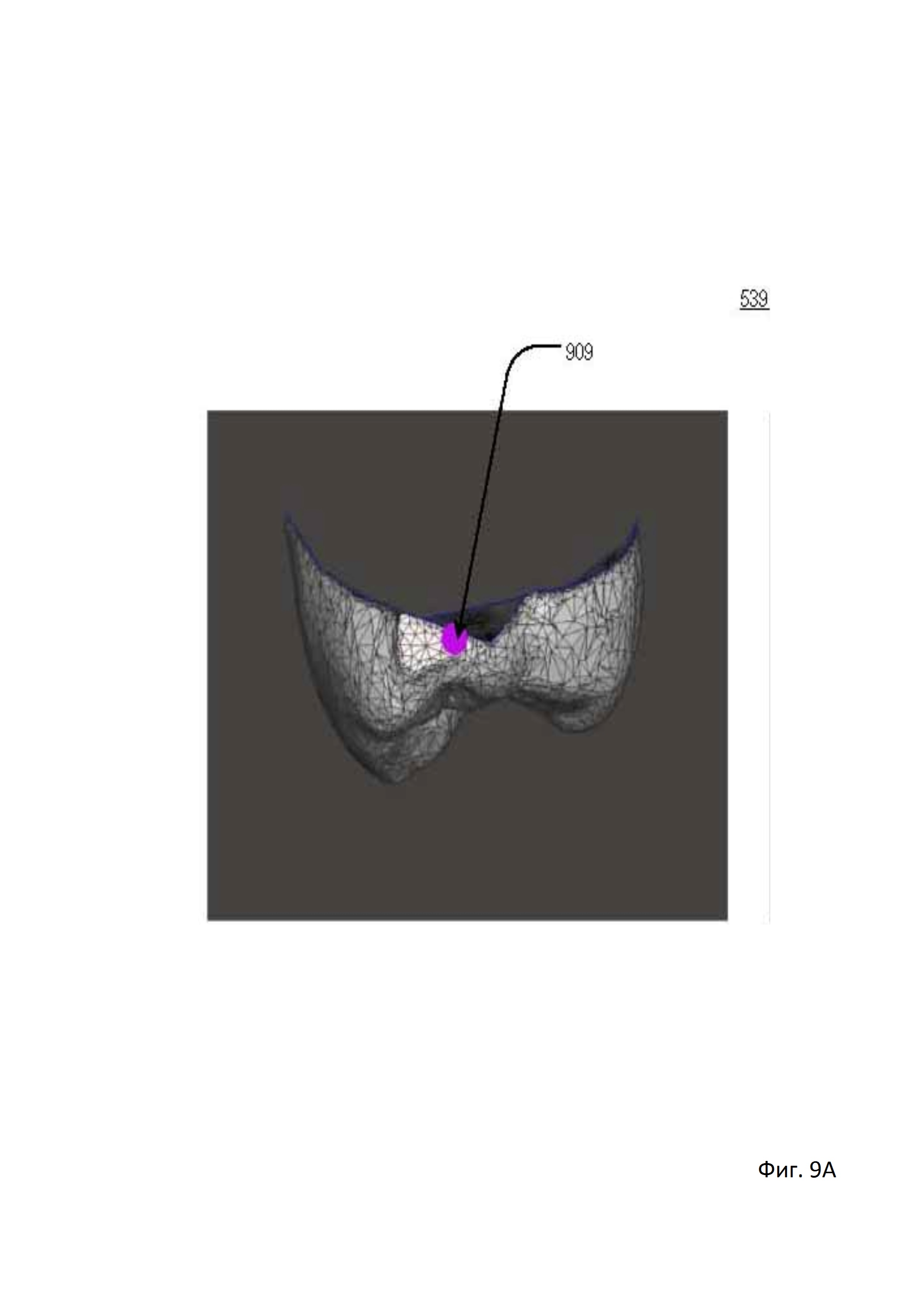
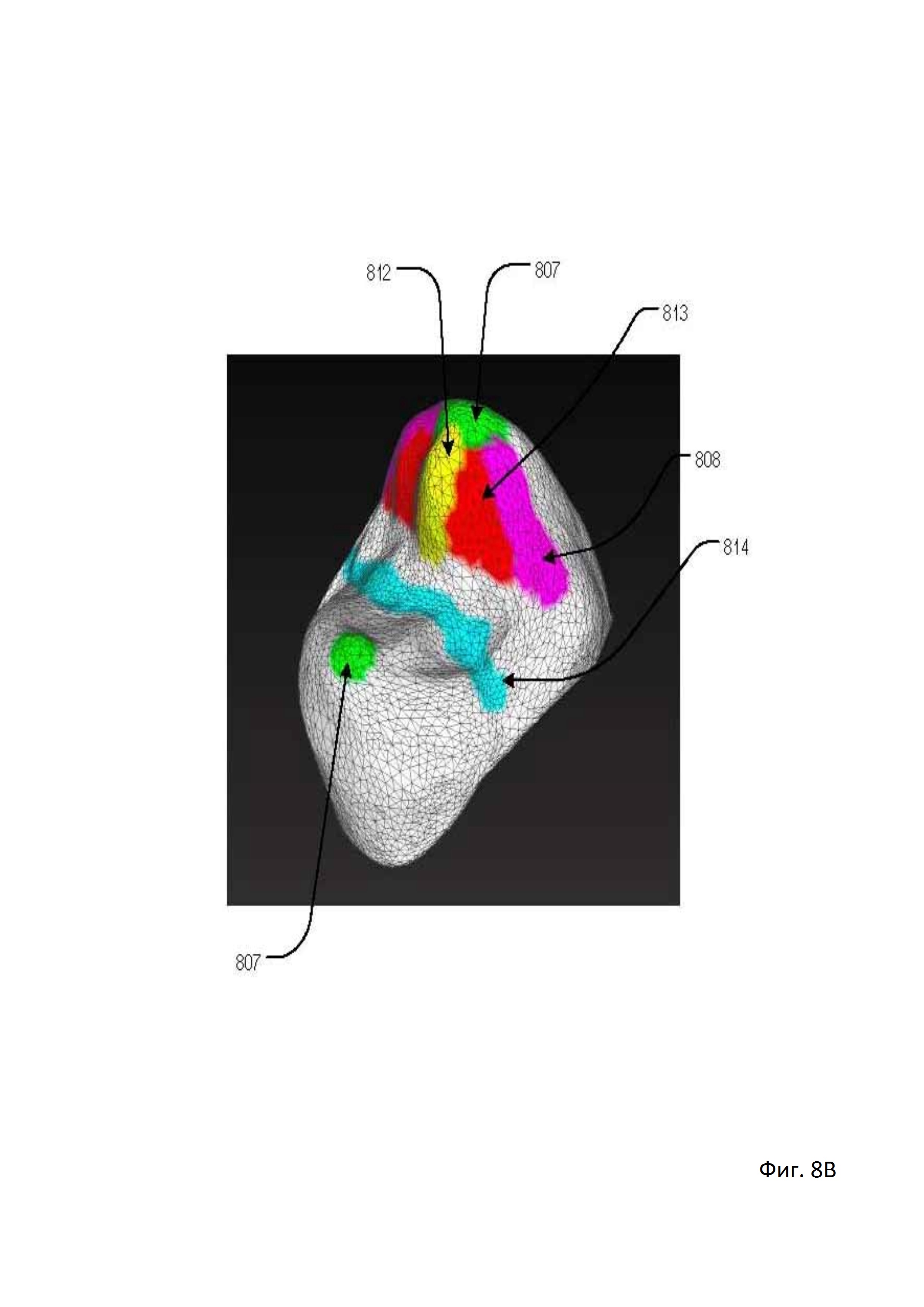
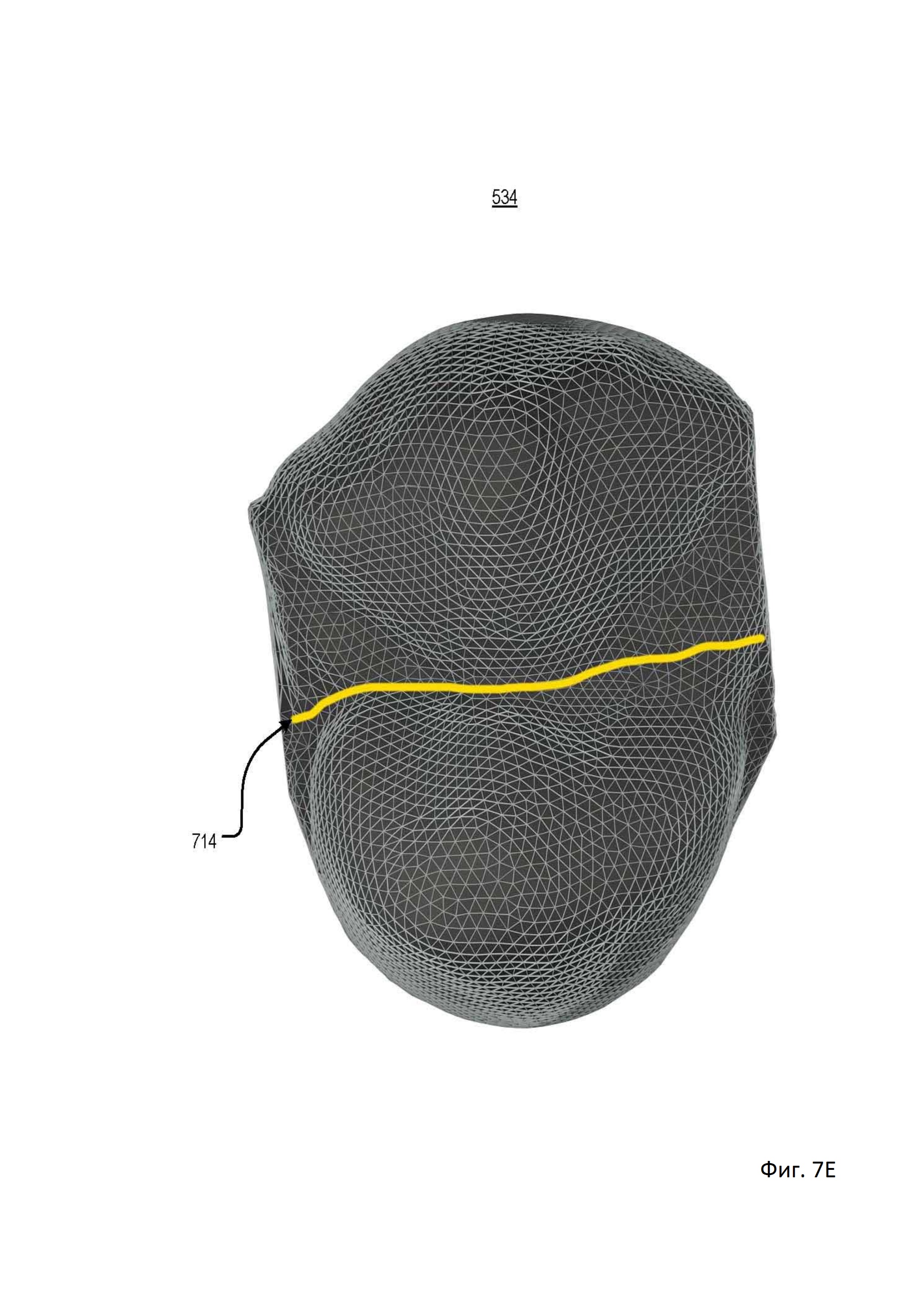
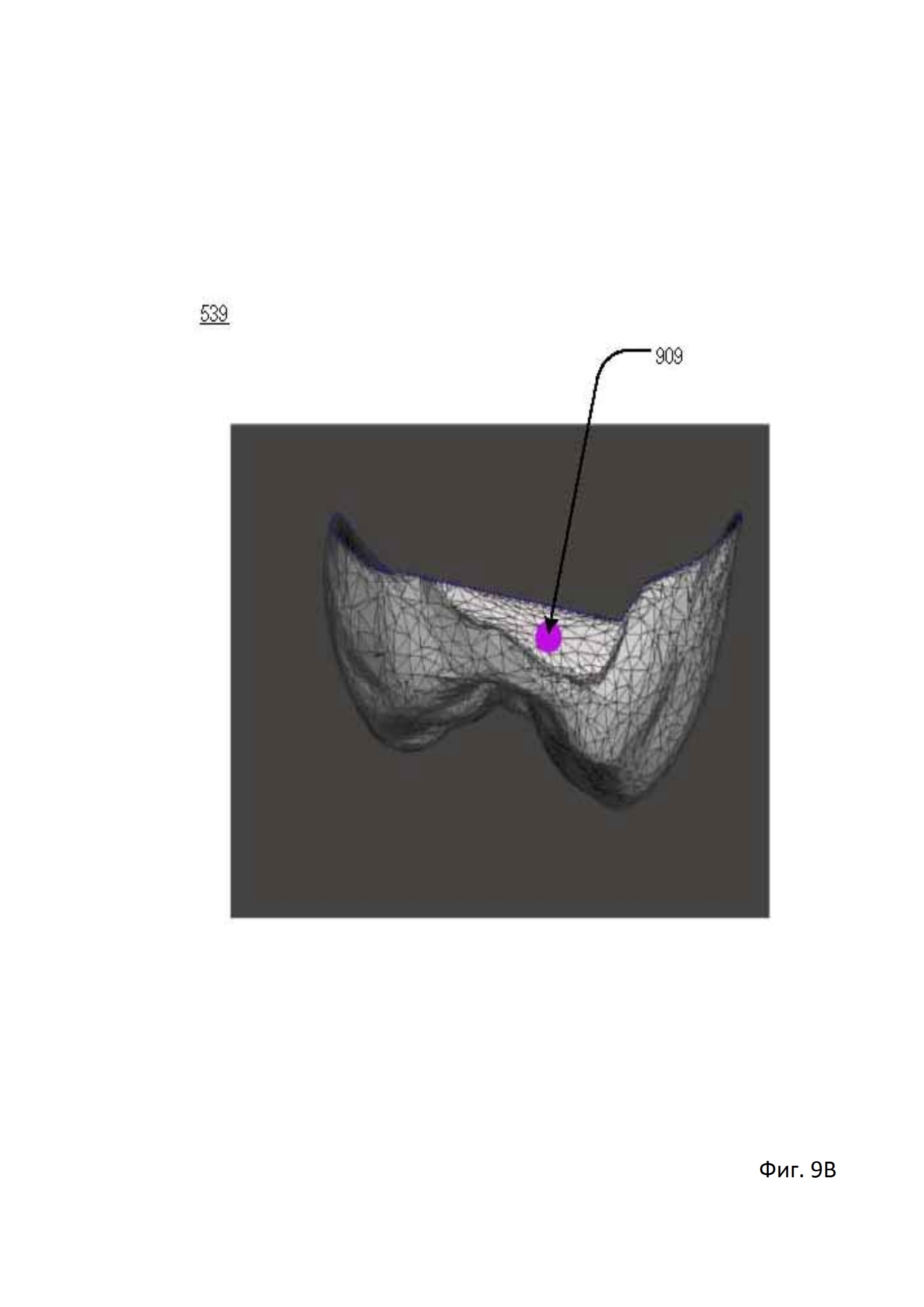
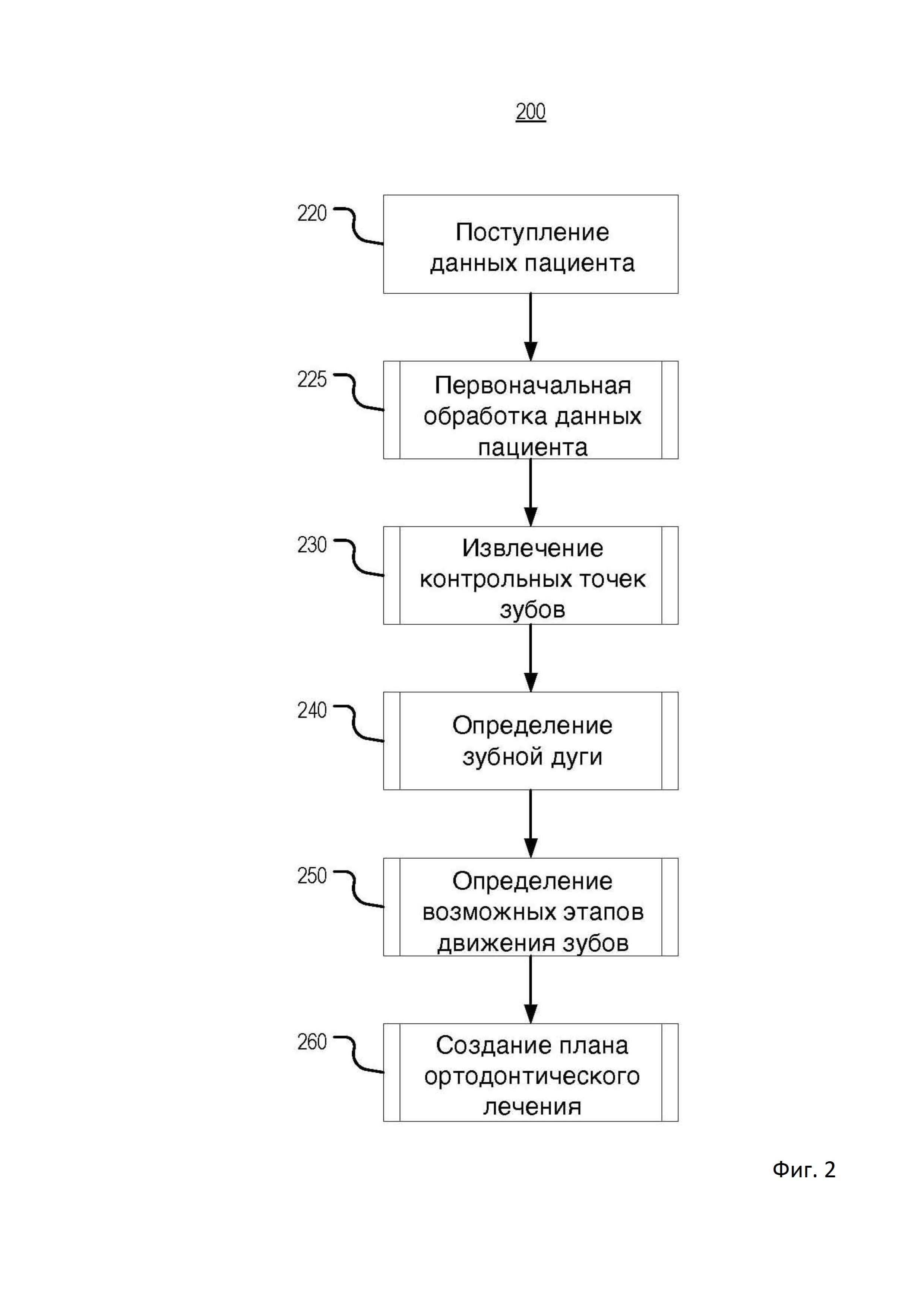


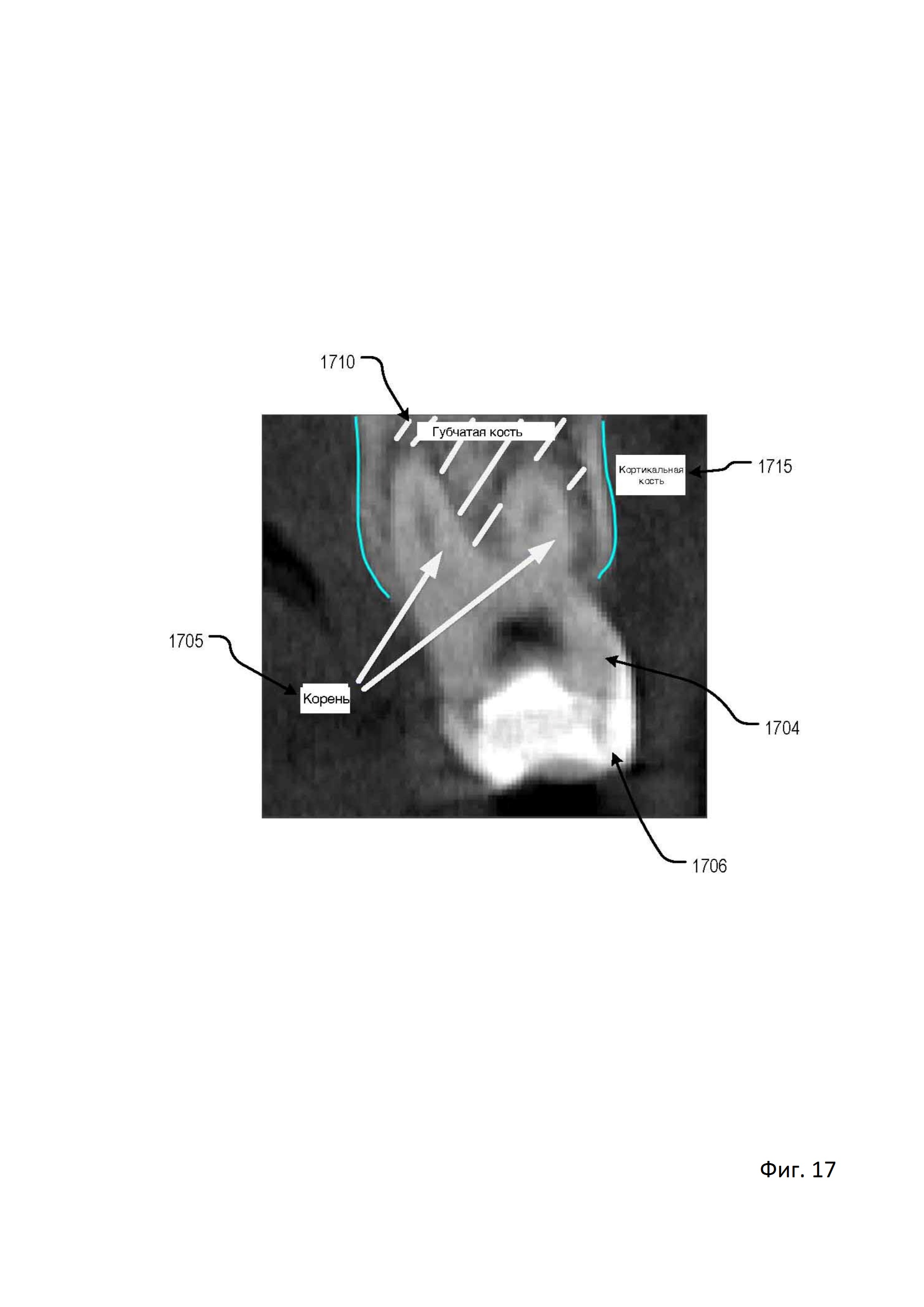
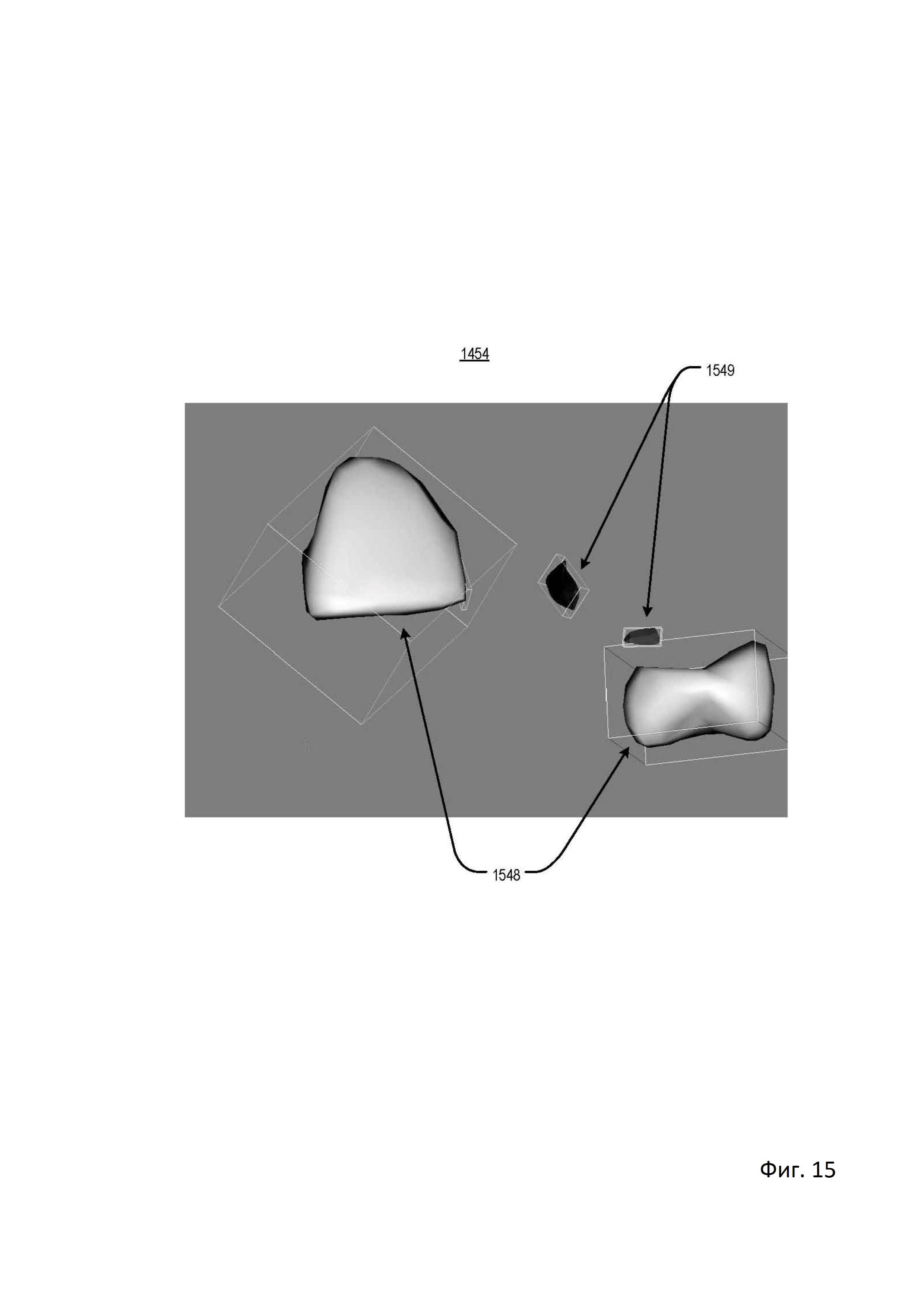
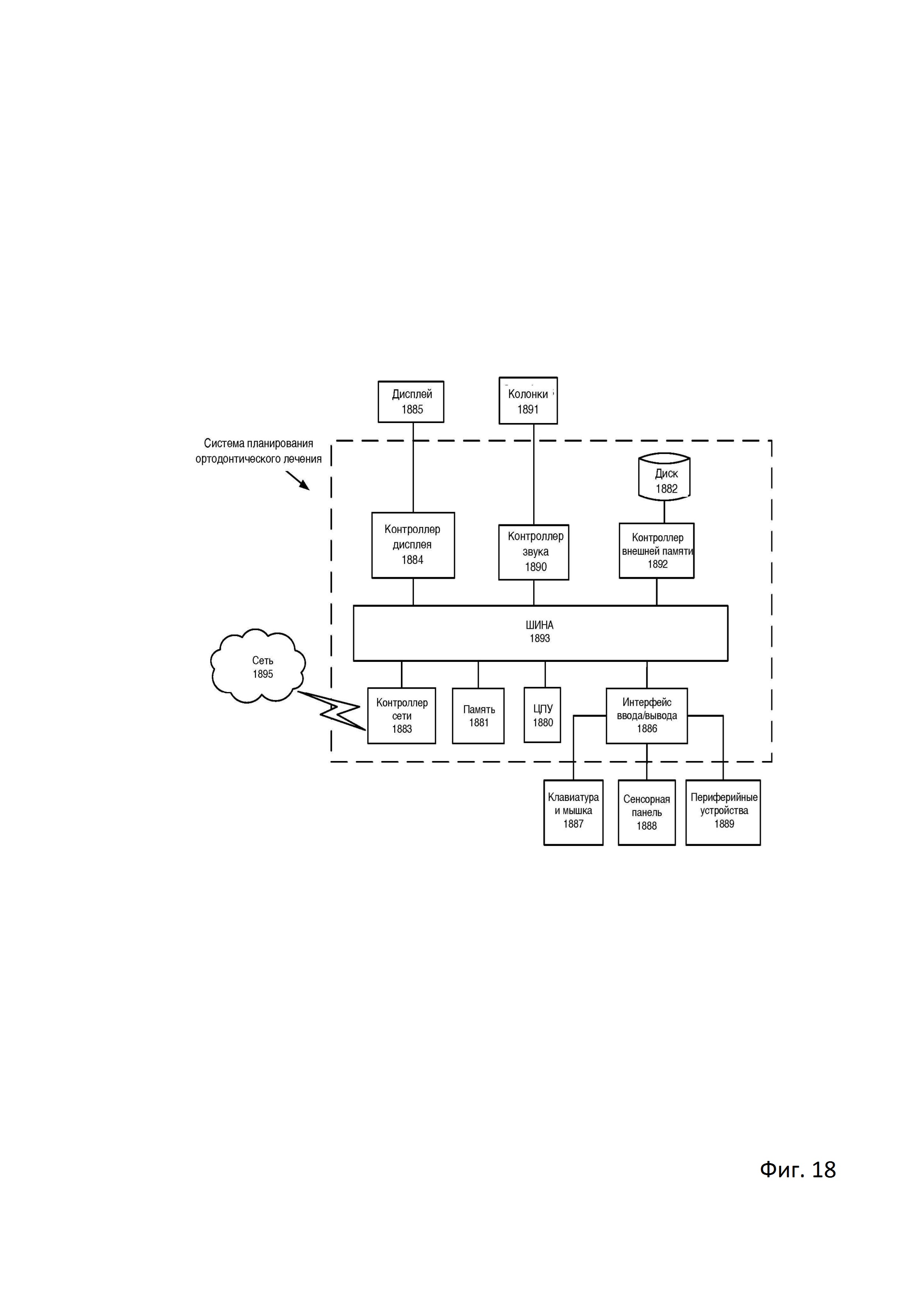
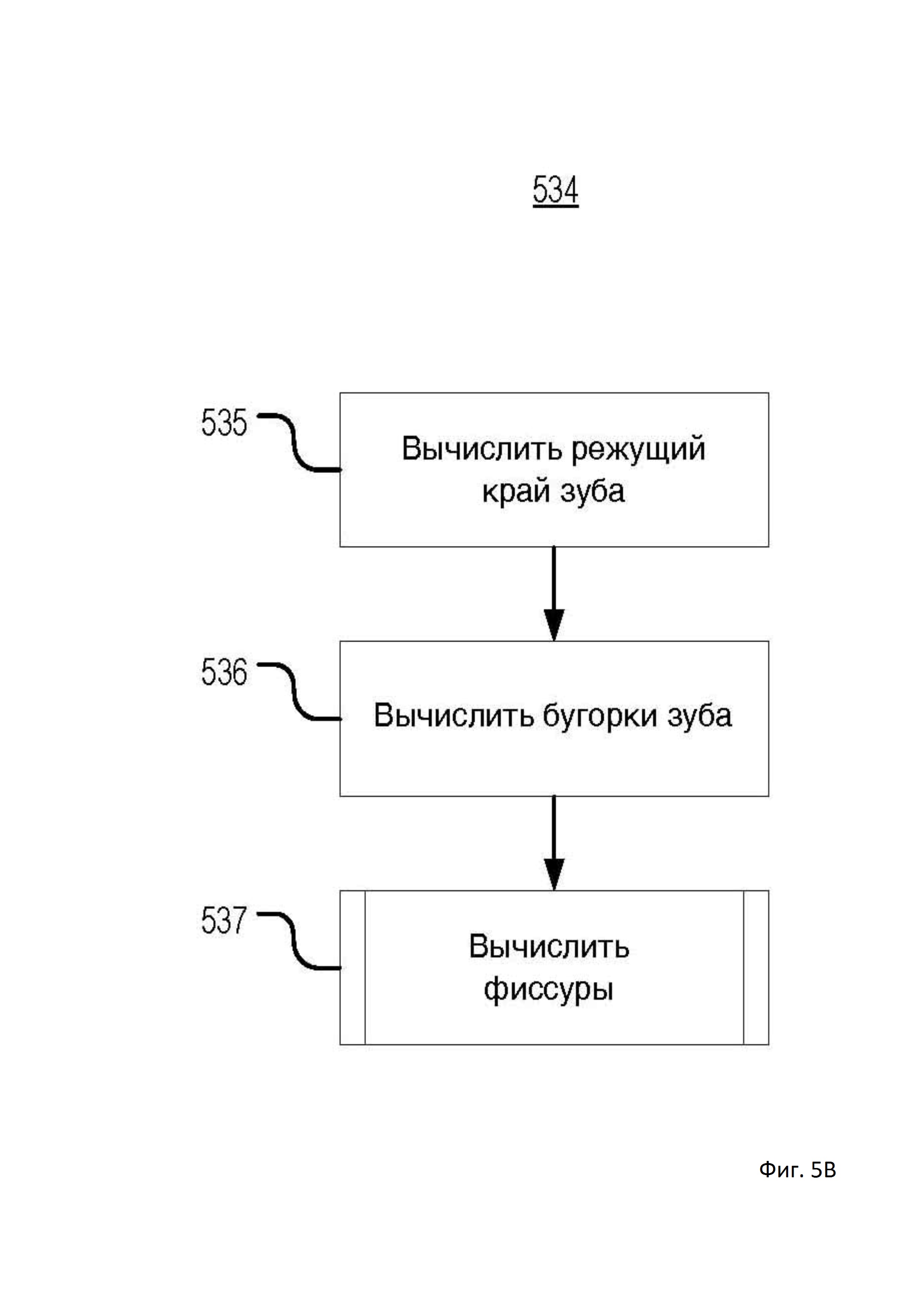
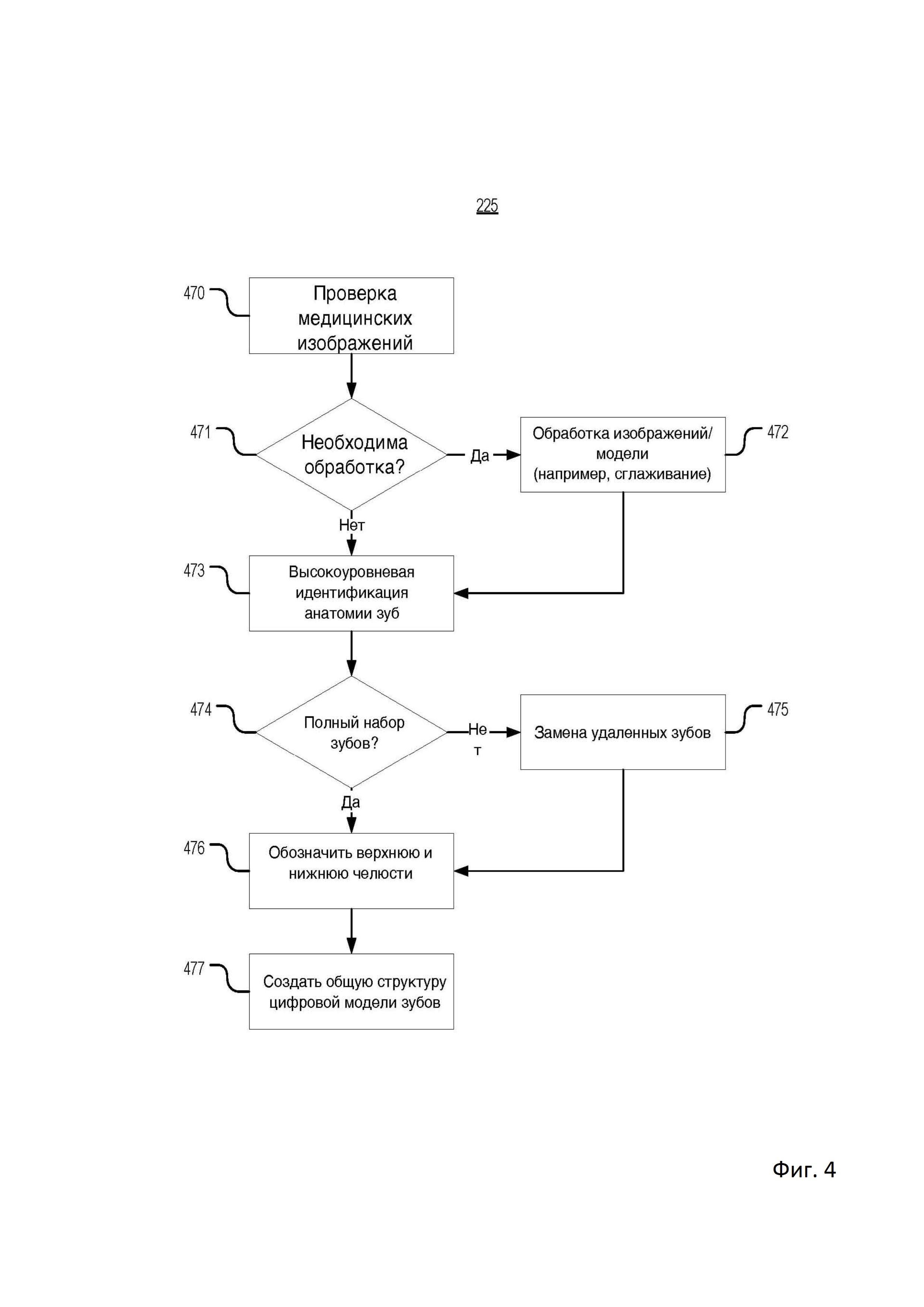


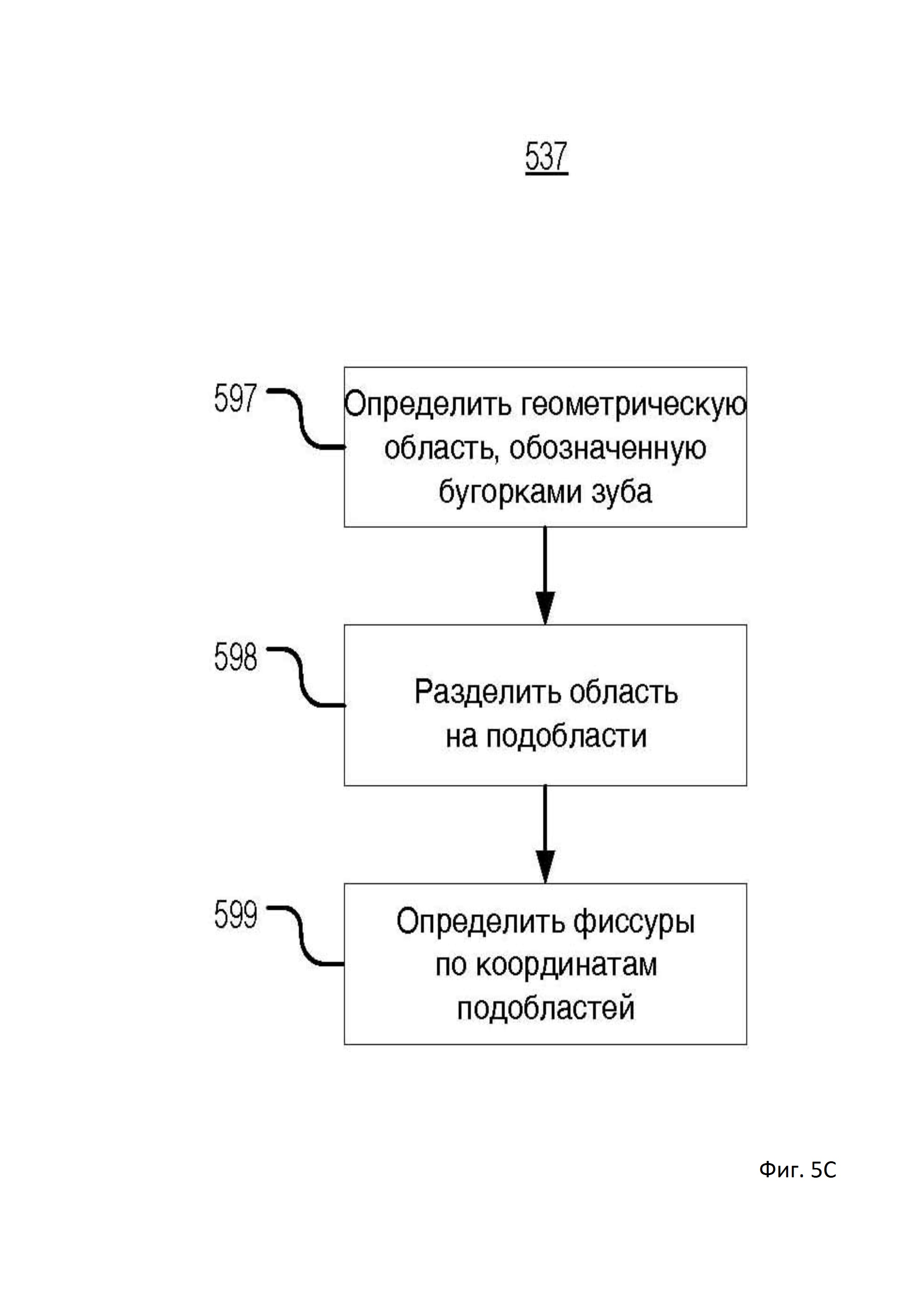
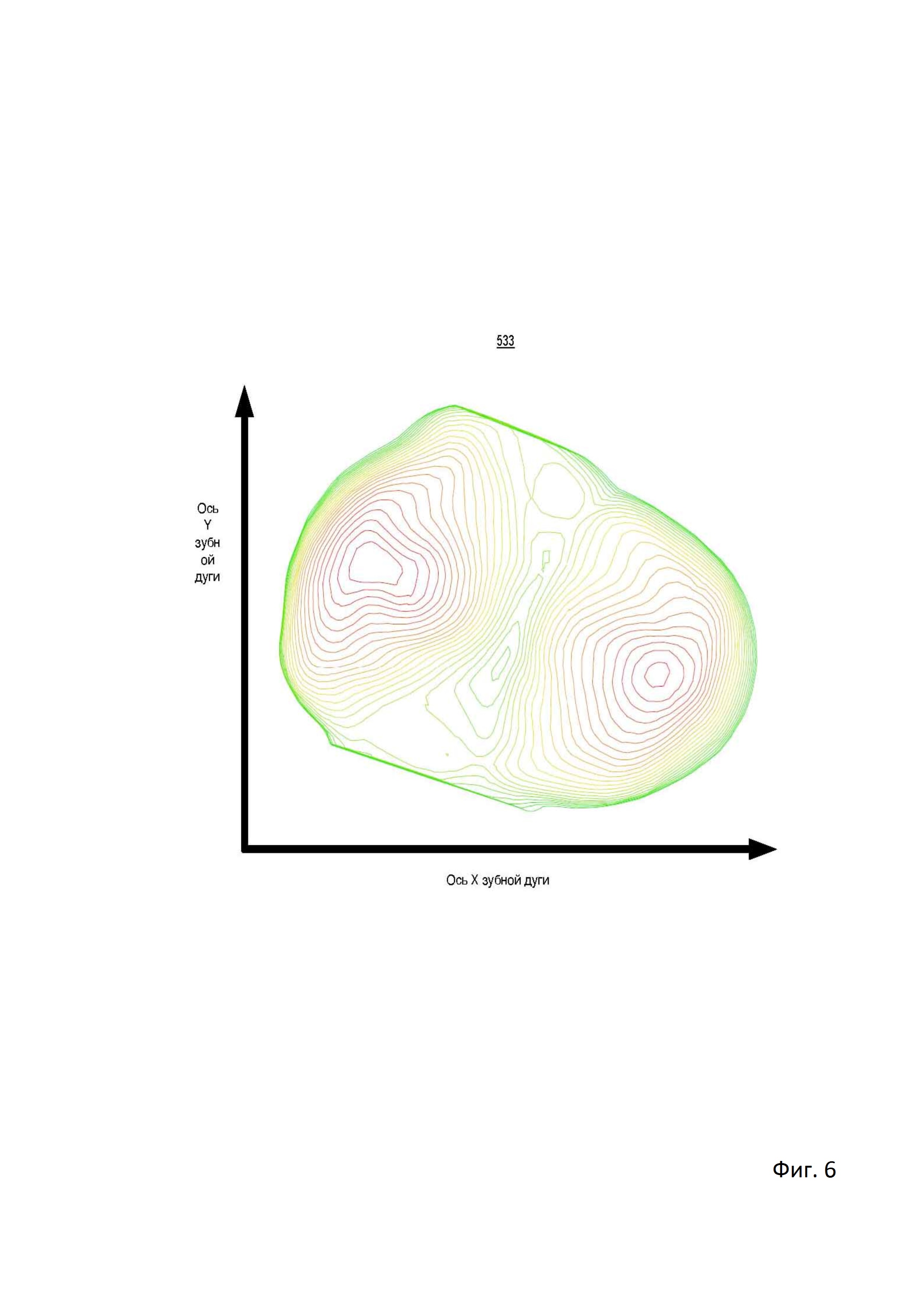
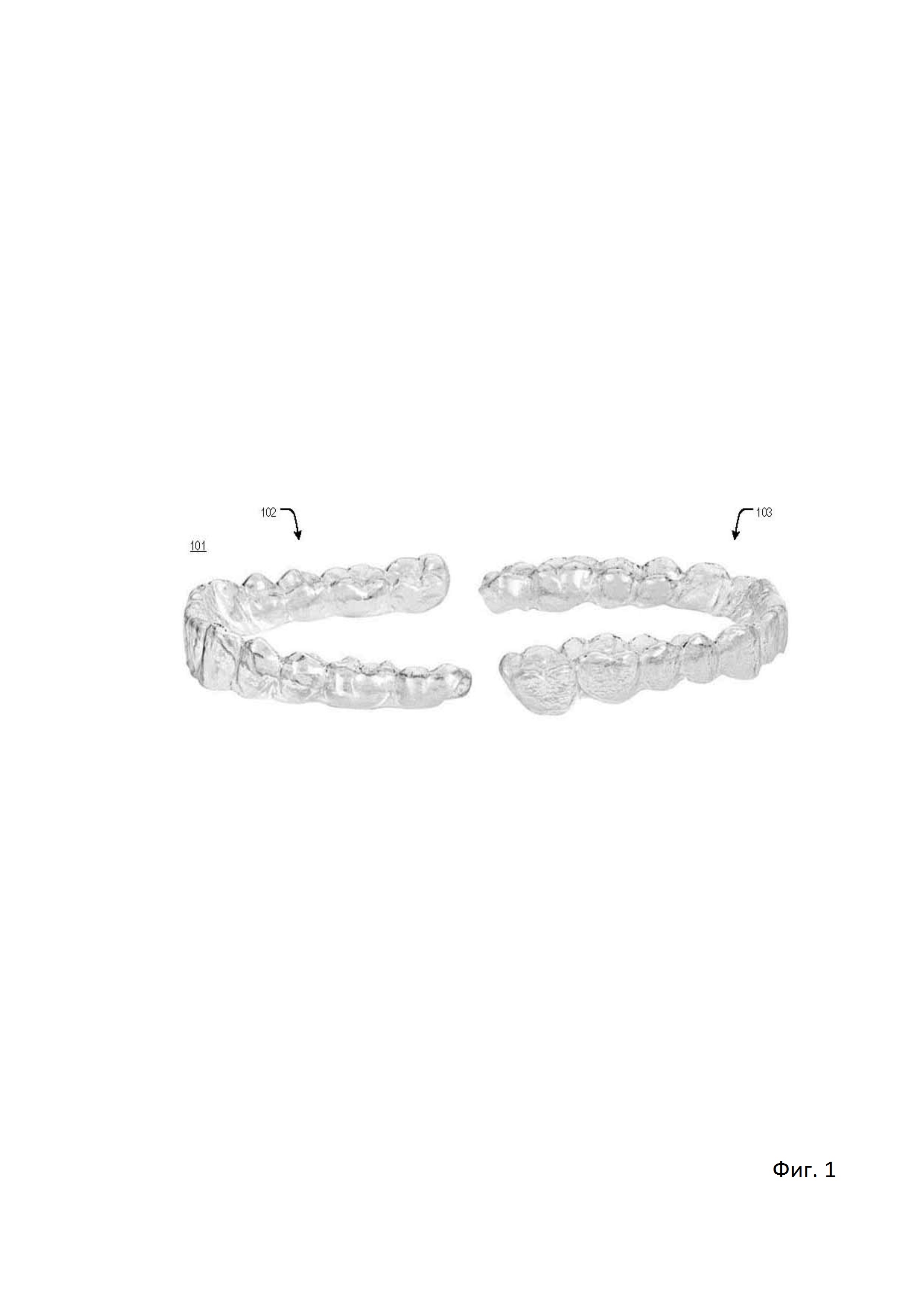
Способ изготовления индивидуализированного прецизионного биоимпланта для одномоментного замещения костных дефектов
Способ изготовления персонифицированных иммобилизирующих изделий

