Результат интеллектуальной деятельности: ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ, И СПОСОБ ОБНАРУЖЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЛОПАСТИ ОТНОСИТЕЛЬНО ВТУЛКИ ТАКОГО ВИНТА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к винту для летательного аппарата, выполненного с возможностью висения, в частности, конвертоплана, вертолета или вертолета, имеющего конфигурацию, полученную на основе традиционного вертолета.
Настоящее изобретение также относится к способу обнаружения пространственного положения лопасти относительно втулки такого винта.
УРОВЕНЬ ТЕХНИКИ
Известные вертолеты в общем содержат фюзеляж, несущий винт, расположенный наверху фюзеляжа, и хвостовой винт, расположенный на заднем конце фюзеляжа.
Более подробно, винт, в свою очередь, содержит втулку, выполненную с возможностью вращения вокруг первой оси и оснащенную множеством лопастей, шарнирно соединенных с вышеуказанной втулкой, и вал, соединенный с приводным элементом и функционально соединенный с втулкой для приведения ее во вращение вокруг первой оси.
Известно несколько типов винтов, каждый из которых обеспечивает свой вариант выполнения шарнирного крепления лопастей к втулке посредством жесткого или упруго деформируемого соединения.
В зависимости от типа винта каждая лопасть имеет одну или более степеней свободы вращательного движения относительно втулки. Эти степени свободы могут соответствовать жестким поворотам или могут быть реализованы в соответствии с типом втулки посредством упругой деформации лопасти относительно втулки.
В частности, три степени свободы вращательного движения лопасти соответствуют:
повороту относительно втулки и вокруг второй оси взмаха, поперечной относительно оси вращения втулки; и/или
повороту относительно втулки и вокруг третьей оси, совпадающей с направлением прохождения лопасти и, следовательно, расположенной по существу в радиальном направлении относительно второй оси, для изменения угла установки; и/или
повороту относительно втулки и вокруг четвертой оси лобового сопротивления (или отставания-опережения), параллельной и смещенной относительно оси вращения и по существу ортогональной первой оси взмаха.
Таким образом, можно определить угловую ориентацию каждого участка лопасти в пространстве относительно втулки с помощью трех углов, в общем известных как угол взмаха, угол установки и угол отставания-опережения. Эти углы определяются между направлением, выполненным за одно целое с участком лопасти и второй, третьей и четвертой осями соответственно.
В полностью шарнирном винте все три вышеуказанные степени свободы вращательного движения соответствуют соответствующим жестким поворотам вокруг второй, третьей и четвертой осей.
В другом случае, в винте-качалке или винте на кардане только степени свободы вращательного движения, связанные с поворотами вокруг второй оси и третьей оси, соответствуют жестким поворотам.
В винте этого типа каждый участок лопасти имеет:
две степени свободы вращательного движения, связанные с двумя углами жесткого поворота вокруг второй и третьей осей соответственно; и
одну степень свободы вращательного движения, связанную с упругим поворотом самой лопасти.
Важно отметить, что каждая лопасть шарнирно соединена с втулкой с помощью одного или более механических шарниров, которые обеспечивают вышеуказанные степени свободы вращательного движения, или в случае бесшарнирных винтов с помощью эластомерных подшипников.
Альтернативно, в случае так называемых бесподшипниковых винтов втулка и лопасти выполнены из упруго деформируемого материала, гибкость которого обеспечивает вышеуказанные степени свободы.
Из-за динамических сил, действующих на лопасть, например, действия центробежной силы, лопасть или эластомерный подшипник (при наличии) упруго деформируются. Из этого следует, что поперечные участки каждой лопасти могут упруго перемещаться в пространстве относительно втулки и параллельно вышеуказанным первой, второй и третьей осям.
Таким образом, во время работы винта каждый участок лопасти подвергается упругим смещениям относительно втулки и параллельно вышеуказанным первой, второй и третьей осям.
Подводя итог, каждый поперечный участок каждой лопасти имеет в зависимости от типа винта:
до трех степеней свободы вращательного движения, обеспечиваемых посредством жесткого или упруго деформированного поворота вокруг одной или более из второй, третьей и четвертой осей; и
до трех степеней свободы поступательного движения, обеспечиваемых посредством соответствующих упругих деформаций параллельно одной или более из второй, третьей и четвертой осей.
Набор этих степеней свободы определяет пространственное положение каждого участка лопасти относительно втулки.
В связи с этим в данной отрасли существует необходимость определения в режиме реального времени пространственного положения определенных рассматриваемых участков лопасти относительно втулки, т.е. значения углов поворота, связанных со степенями свободы вращательного движения, и упругих деформаций, связанных со степенями свободы поступательного движения лопасти относительно втулки.
Документ US 2014/0061369 описывает магнитную систему определения положения лопастей вертолета.
Точнее говоря, система определения положения лопастей содержит множество магнитов, установленных на втулке, и магнитные датчики Холла, установленные на лопастях винта.
Документ US 4,583,862 описывает систему определения пространственного положения лопастей вертолета, содержащую: источник света, расположенный на конце каждой лопасти, и пару датчиков, расположенных на втулке. В свою очередь, каждый датчик содержит непрозрачный экран, обеспеченный решеткой и множеством детекторов, расположенных с другой стороны экрана относительно источника света. Система определения определяет углы отставания-опережения и взмаха лопастей на основе положения светового луча, определенного детекторами.
Документ US 4,465,367 описывает систему измерения смещения свободных концов лопастей вертолета относительно плоскости вращения лопастей. Система измерения содержит стробоскопическую лампу, отражающую ленту, расположенную на конце каждой лопасти, и блок управления стробоскопической лампой. Прохождение отражающей ленты через световой луч, испускаемый стробоскопического лампой, позволяет визуализировать положения концов лопастей.
Документ EP-A-2778049 описывает систему измерения угла взмаха лопасти винта. Система содержит преобразователь углового смещения RVDT-типа.
Документ US-A-2013/0243597 описывает систему измерения углового положения лопастей вертолета относительно второй оси взмаха или четвертой оси лобового сопротивления. Система измерения содержит множество упругих, гибких стержней, расположенных между втулкой и комлями лопастей, и множество тензометрических датчиков, связанных с соответствующими стержнями. Каждый тензометрический датчик выполнен с возможностью определения ориентации соответствующей лопасти относительно второй оси взмаха и четвертой оси лобового сопротивления при изгибе соответствующего стержня.
В данной отрасли существует необходимость определения смещений и поворотов лопастей винта вертолета с использованием минимально возможного количества компонентов для упрощения адаптации к разным типам винтов и внесения наименее существенных модификаций в конструкцию лопастей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в изгоовлении винта для летательного аппарата, выполненного с возможностью висения, который удовлетворяет вышеуказанные требования простым и экономически эффективным образом.
Документ EP-A-3025958 раскрывает винт для летательного аппарата, выполненного с возможностью висения, согласно преамбуле пунктов 1 и 11 формулы изобретения.
Документ EP-A-112031 раскрывает детектор положения, содержащий средство, образующее вытянутое поле обзора, мишень, прикрепленную к лопасти винта, положение которой определяется, и удерживающую контрольную отметку, и датчик для сканирования поля обзора. Мишень может находиться в любом диапазоне положений вдоль поля обзора.
Вышеуказанная задача решается настоящим изобретением, поскольку оно относится к винту для летательного аппарата, выполненного с возможностью висения, по пункту 1 формулы изобретения.
Настоящее изобретение также относится к способу обнаружения пространственного положения по меньшей мере одной лопасти относительно втулки винта для летательного аппарата, выполненного с возможностью висения, по пункту 11 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже описан предпочтительный вариант выполнения исключительно в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
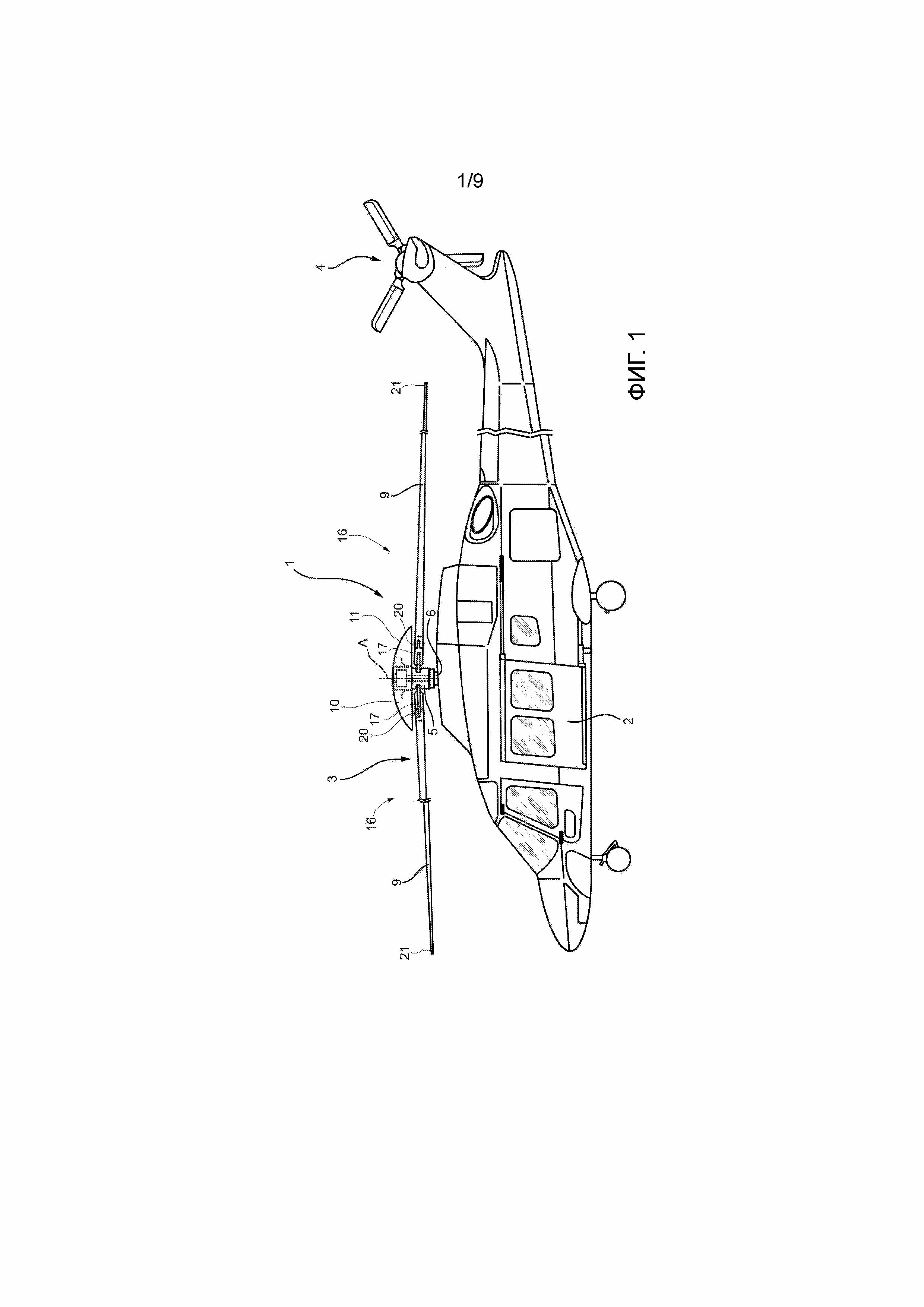
Фигура 1 представляет собой вид сбоку вертолета с винтом для летательного аппарата, выполненного с возможностью висения, выполненным в соответствии с принципами настоящего изобретения;
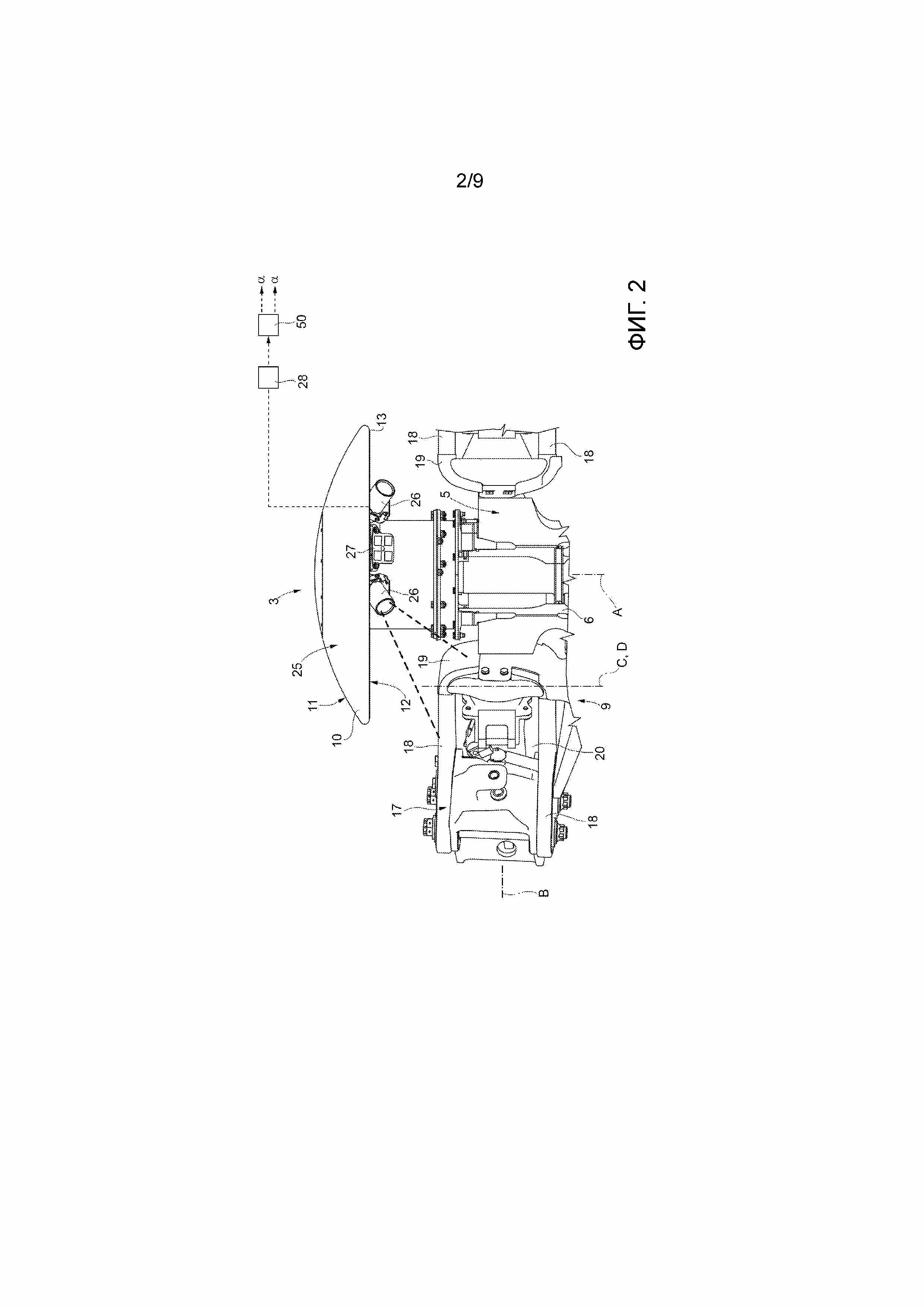
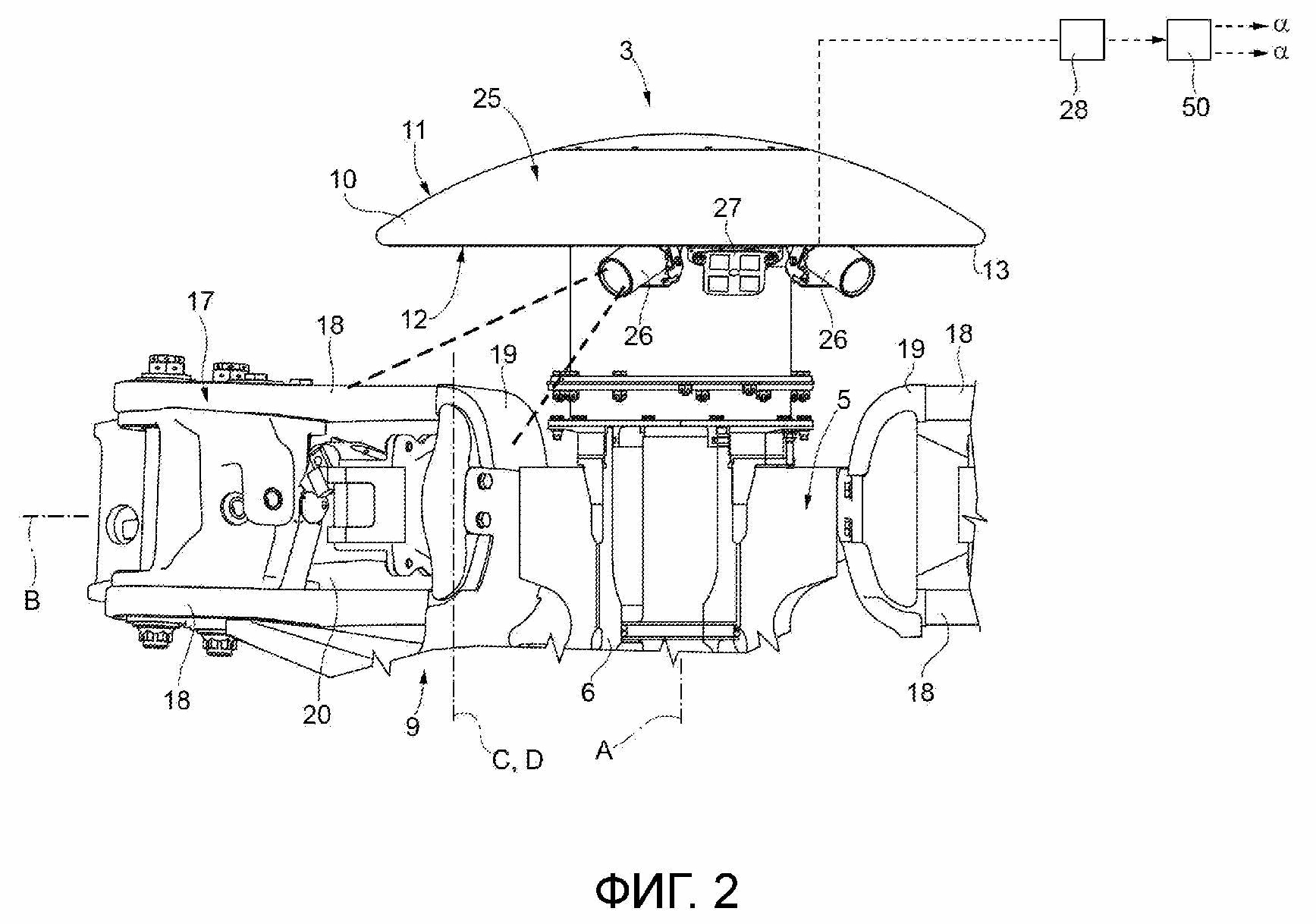
Фигура 2 представляет собой частичный вид сбоку в разрезе винта, показанного на Фигуре 1, причем некоторые детали удалены в целях наглядности;
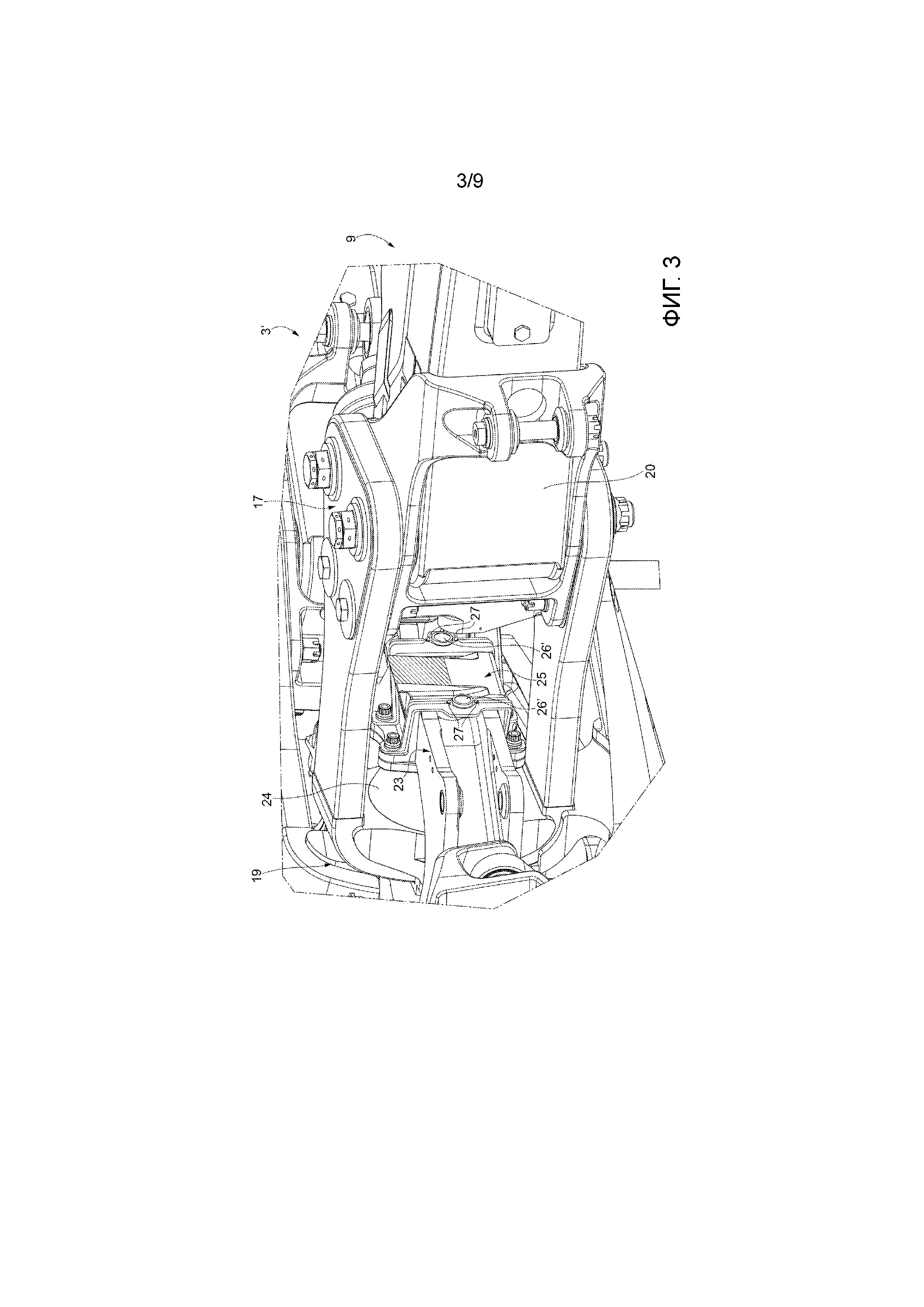
Фигура 3 представляет собой увеличенный вид в перспективе винта, показанного на Фигуре 2;
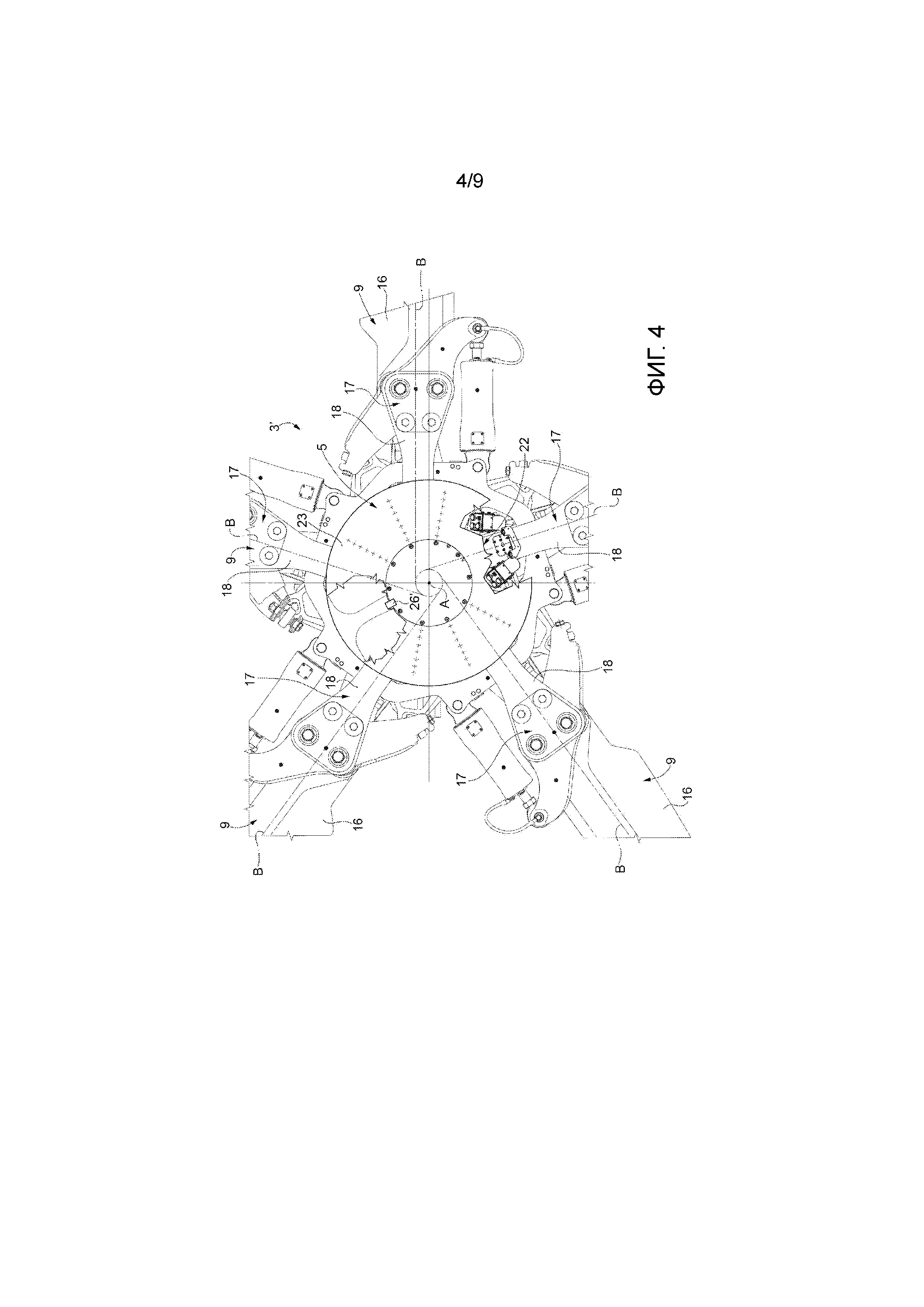
Фигура 4 представляет собой вид сверху винта, показанного на Фигуре 3, причем некоторые детали удалены в целях наглядности;
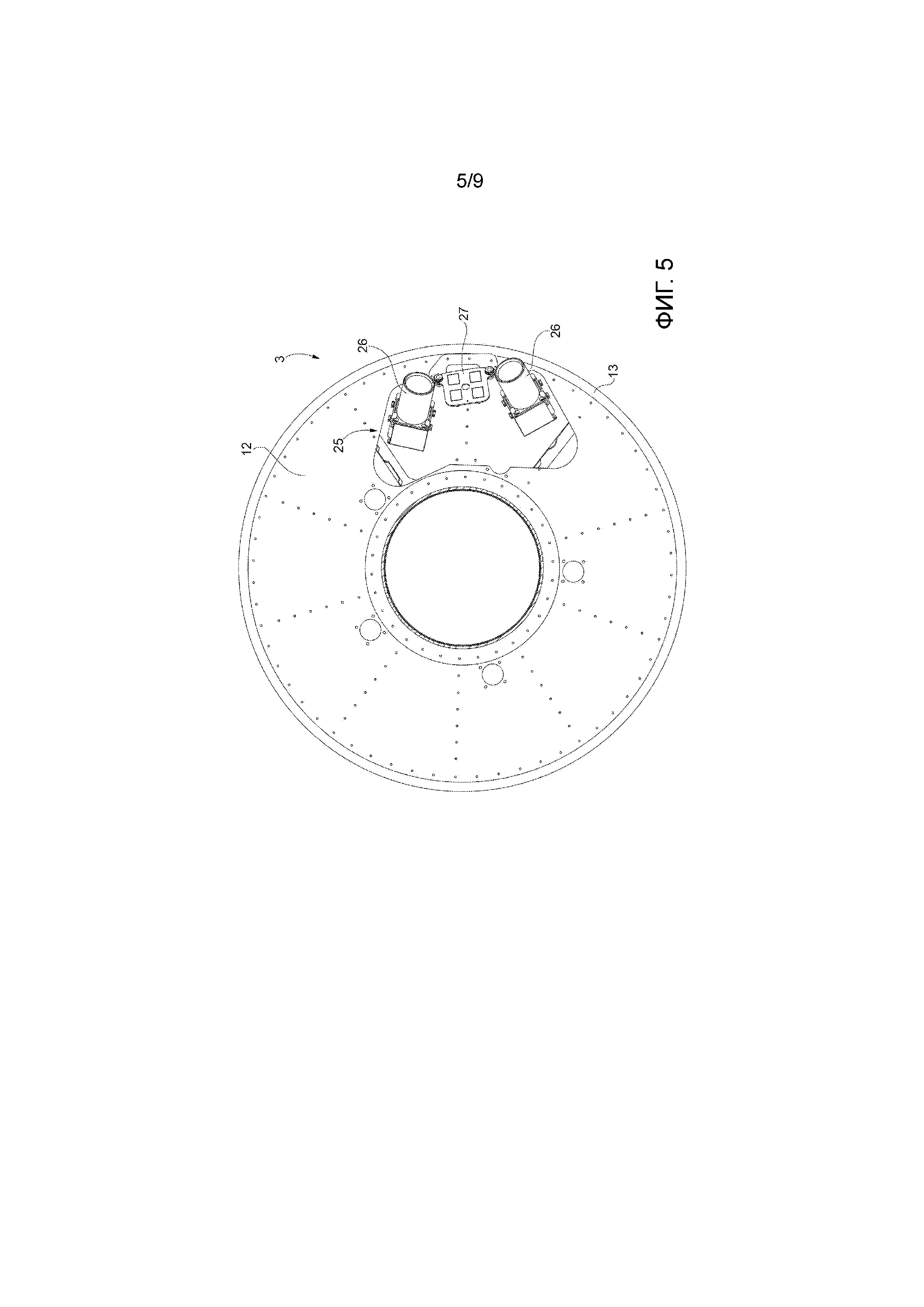
Фигура 5 представляет собой вид снизу винта, показанного на Фигурах 3 и 4, причем некоторые детали удалены в целях наглядности;
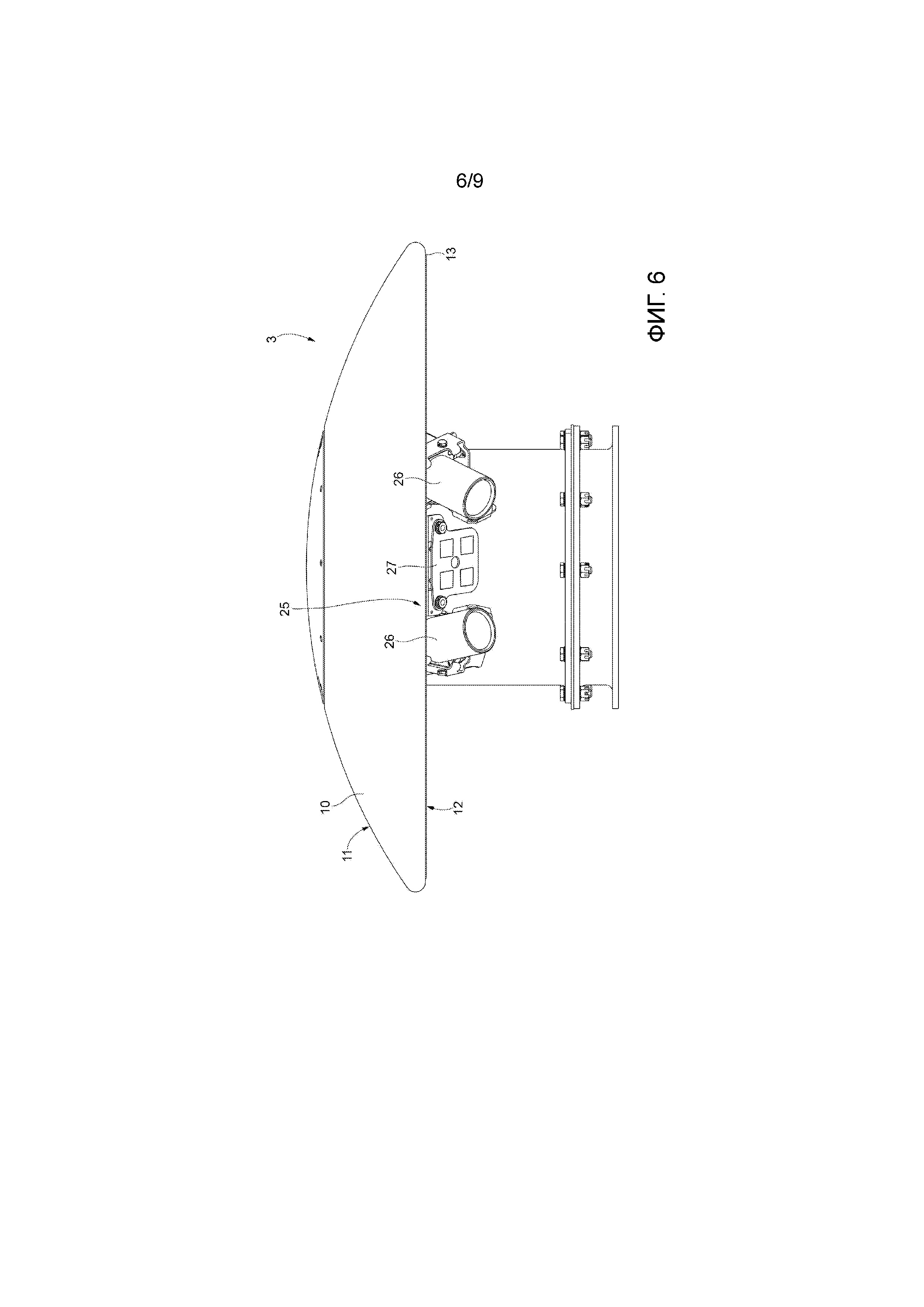
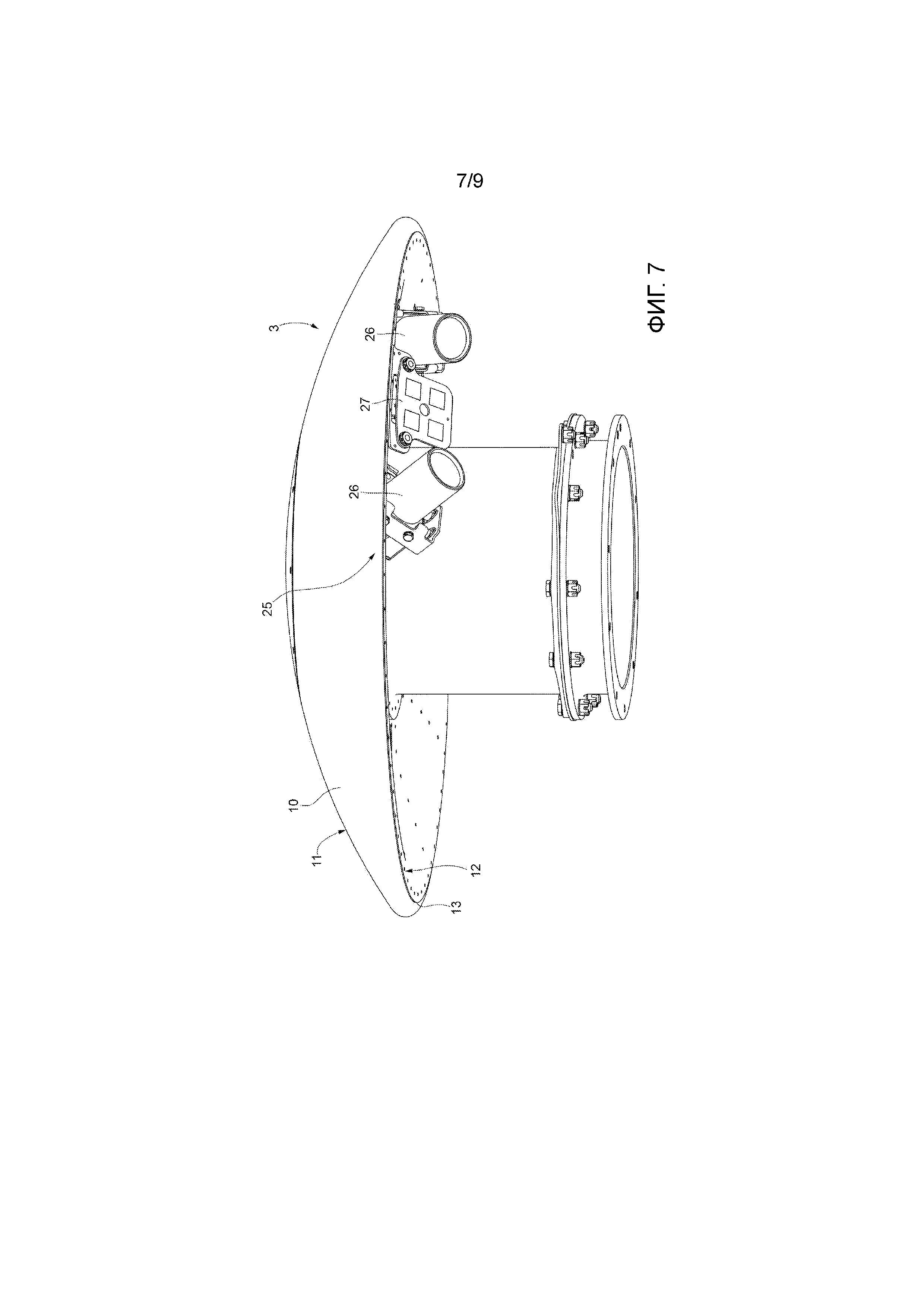
Фигуры 6 и 7 представляют собой увеличенные виды спереди некоторых деталей винта, показанного на Фигурах 3-5;
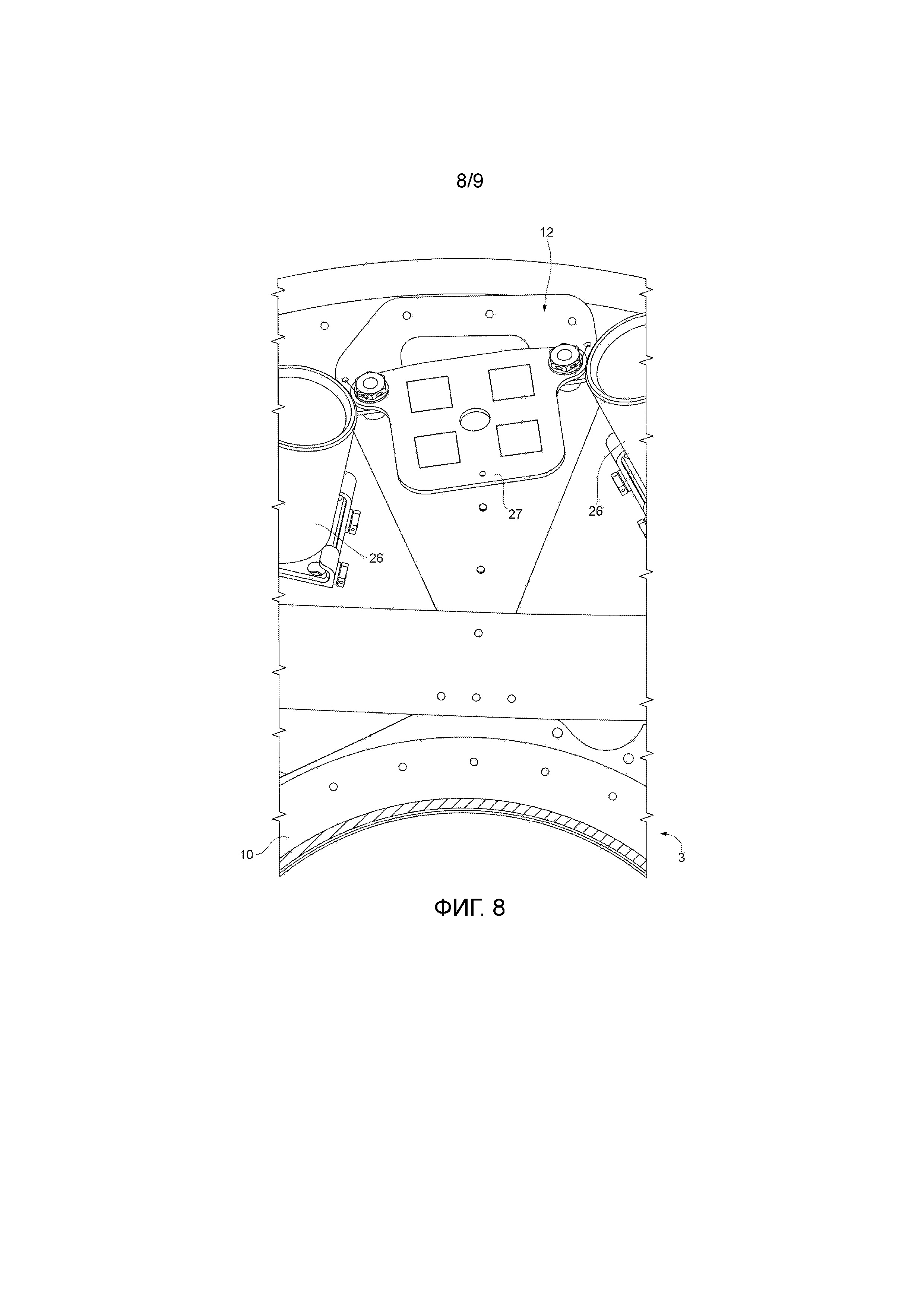
Фигура 8 представляет собой увеличенный вид снизу некоторых деталей винта, показанного на Фигурах 2-7; и
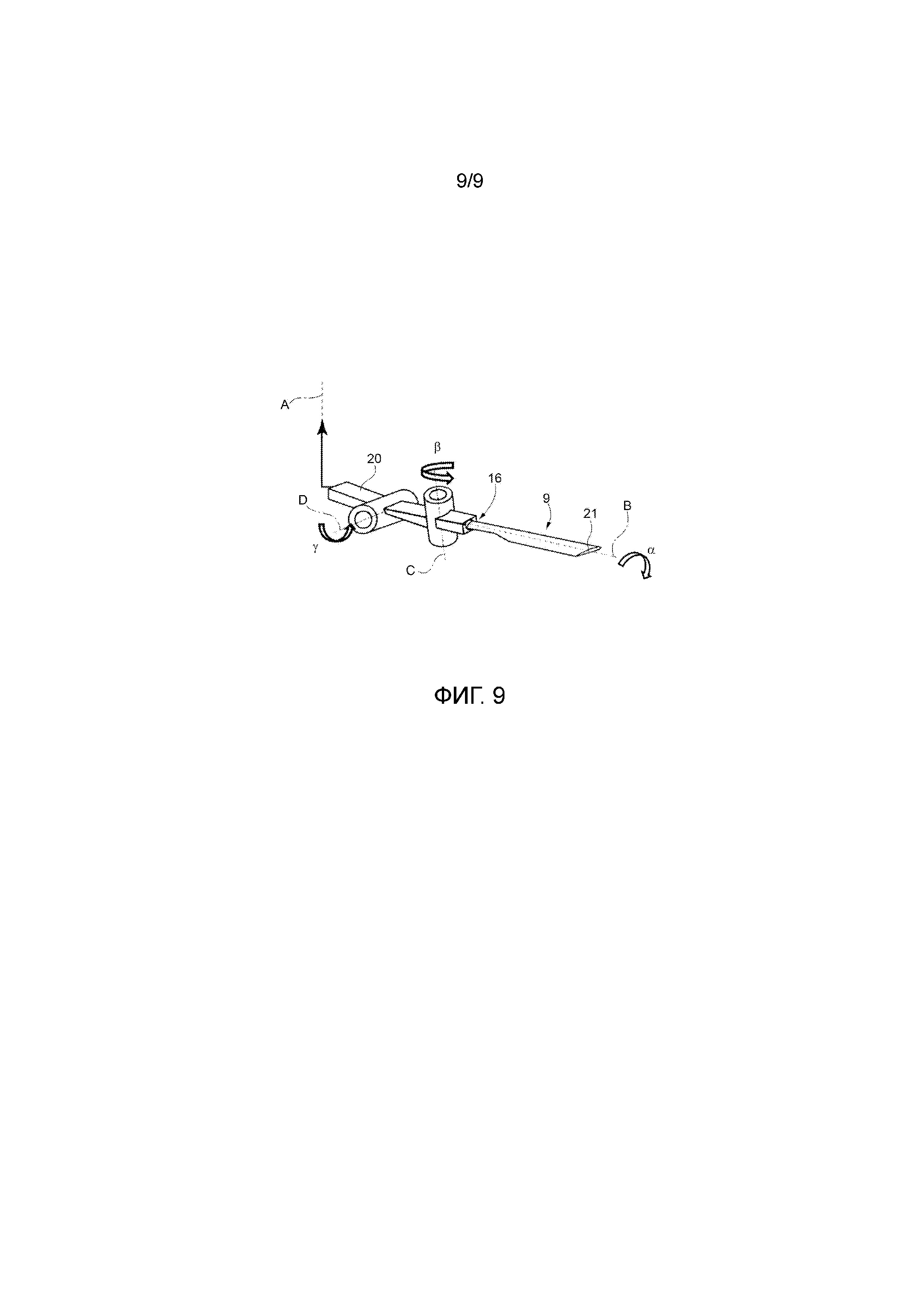
Фигура 9 представляет собой схему, иллюстрирующую степени свободы вращательного движения каждой лопасти винта, показанного на Фигурах 2-8.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Обратимся к Фигуре 1, ссылочная позиция 1 обозначает летательный аппарат, выполненный с возможностью висения, в частности, вертолет, в общем содержащий фюзеляж 2, несущий винт 3, расположенный наверху фюзеляжа 2 и выполненный с возможностью вращения вокруг оси А, и хвостовой винт 4, расположенный на одном конце фюзеляжа 2 и выполненный с возможностью вращения вокруг оси, поперечной относительно оси А.
Более подробно, несущий винт 3 содержит втулку 5, центрированную на оси А и удерживающую множество консольно установленных лопастей 9, которые продолжаются в радиальном направлении относительно оси А.
Несущий винт 3 дополнительно содержит вал 6, выполненный с возможностью вращения вокруг оси А, выполненный за одно целое с втулкой 5 в угловом направлении и соединенный (не показано) с приводным элементом, например, турбиной, установленной на вертолете 1. В частности, вал 6 является полым.
Точнее говоря (Фигура 2), вал 6 частично размещен внутри втулки 5 и выполнен за одно целое с втулкой 5 в угловом направлении с помощью соединительного средства известного типа.
Важно отметить, что известны различные типы винтов, каждый из которых имеет свой вариант шарнирного соединения лопастей 9 с втулкой 5.
В зависимости от типа винта каждый поперечный участок каждой лопасти 9 имеет одну или более степеней свободы вращательного движения относительно втулки 5.
Эти степени свободы вращательного движения показаны в качестве неограничивающего примера на Фигуре 9 и соответствуют:
углу α установки, связанному с поворотом вокруг оси B, что обеспечивает изменение угла установки лопасти 9;
углу β отставания-опережения, связанному с поворотом вокруг оси C, параллельной и смещенной относительно оси А, что обеспечивает отставание-опережение лопасти 9; и
углу γ взмаха, связанному с поворотом вокруг оси D, поперечной относительно оси A, B и C, что обеспечивает взмах лопасти 9.
В зависимости от типа винта 3 и шарнирного соединения лопастей 9 с втулкой 5 вышеуказанные углы α, β и γ соответствуют поворотам, которые являются жесткими или получены посредством упругой деформации лопастей 9.
В показанном варианте выполнения винт 3 относится к полностью шарнирному типу, т.е. углы α, β и γ соответствуют жестким поворотам вокруг соответствующих осей B, C и D.
В показанном варианте выполнения лопасти 9 шарнирно соединены с втулкой 5 с помощью эластомерных подшипников 24 (только один из которых показан на Фигуре 3).
Вследствие этого, участки, поперечные оси B каждой лопасти 9, также подвергаются упругим смещениям вдоль осей B, C и D, что обусловлено силами, действующими на каждую лопасть 9 во время работы винта 3, в частности, центробежной силой.
В общем можно связать шесть степеней свободы с каждым поперечным участком каждой лопасти 9, три из которых являются вращательными и соответствуют значениям углов α, β и γ, а три являются поступательными и соответствуют смещениям вдоль осей A, B и C.
В этом описании выражение «пространственное положение» поперечных участков лопасти 9 далее будет означать значение вышеуказанных степеней свободы участка лопасти 9.
Винт 3 также содержит устройство 10 направления потока, выполненное с возможностью направления аэродинамического потока на винт 3 и, следовательно, снижения аэродинамического сопротивления, а также снижения влияния струи от несущего винта на хвостовой винт.
Более подробно, устройство 10 направления потока имеет кольцевую форму, продолжается вокруг оси А и расположено с противоположной стороны втулки 5 относительно фюзеляжа 2.
Устройство 10 направления потока имеет форму «шляпы» и ограничено двумя поверхностями 11 и 12, обращенными друг к другу в осевом направлении; в частности, поверхность 11 ограничивает устройство 10 направления потока в осевом направлении с противоположной стороны относительно втулки 5, тогда как поверхность 12 ограничивает устройство 10 направления потока в осевом направлении со стороны, ближайшей к втулке 5.
Поверхность 11 является непрерывной и продолжается в радиальном направлении от оси А на уменьшающемся в осевом направлении расстоянии от втулки 5.
Поверхность 12 имеет кольцевую форму, центрированную на оси А.
Поверхности 11 и 12 соединяются вдоль кругового края 13, который также центрирован на оси А.
Поверхности 11 и 12 имеют такую форму, что осевое расстояние между ними уменьшается в радиальном направлении от оси А.
Как показано на сопровождающих чертежах, каждая лопасть 9 продолжается в общем вдоль оси B, по существу радиальной относительно оси А, и содержит основной корпус 16 (только частично показан на сопровождающих чертежах), предназначенный для образования несущей/маневренной поверхностей вертолета.
Винт 3 содержит множество соединительных элементов 17, закрепленных на втулке 5, к которым шарнирно прикреплены основные корпусы 16 соответствующих лопастей 9.
В свою очередь, основной корпус 16 содержит два конца 20 и 21, противоположные друг другу вдоль оси B и соответственно расположенные в радиально внутреннем и внешнем положениях относительно оси А.
В частности, соединительный элемент 17 каждой лопасти 9 имеет по существу C-образную форму и образован парой параллельных кронштейнов 18, между которыми закреплен самый внутренний в радиальном направлении конец основного корпуса 16 лопасти 3, и соединительный участок 19 кронштейнов 18, выполненный с возможностью зацепления с соответствующим гнездом 22 (Фигура 2), образованным пластиной 23 втулки 5, лежащей в плоскости, ортогональной оси А.
Точнее говоря, соединительный участок 19 соединительного элемента 17 каждой лопасти 9 входит в зацепление с соответствующим гнездом 22 втулки 5 и обеспечивает шарнирное соединение лопасти 9 относительно втулки 5.
Вертолет 1 также содержит блок 25 обнаружения, выполненный с возможностью обнаружения пространственного положения лопастей 9 относительно втулки 5.
Блок 25 обнаружения предпочтительно выполнен с возможностью получения оптического изображения пространственного положения каждой лопасти 9 относительно втулки 5.
В частности, блок 25 обнаружения содержит одну или более камер 26 (Фигуры 4, 5 и 6).
Блок 25 обнаружения также содержит блок 28 управления (схематически показан на Фигуре 2), который запрограммирован с возможностью обработки изображений, получаемых камерой 26, и определения пространственного положения лопастей 9.
В предпочтительном варианте выполнения настоящего изобретения блок 25 обнаружения содержит одну камеру 26 для получения оптического изображения каждой лопасти 9.
Альтернативно, блок 25 обнаружения содержит две стереоскопические камеры 26 для получения оптического изображения каждой лопасти 9.
Точнее говоря, камеры 26 установлены на поверхности 12 устройства 10 направления потока и обращены к соответствующим лопастям 9.
Предпочтительно, камеры 26 выполнены с возможностью получения изображения пространственного положения лопастей 9 на соединительных элементах 17 соответствующих лопастей 9.
Альтернативно, камеры 26 выполнены с возможностью получения оптического изображения пространственного положения лопастей 9 на концах 20 соответствующих лопастей 9.
В частности, поверхность 12 содержит устройство 27 подсветки для подсветки областей рассматриваемых лопастей 9 во время этапа получения оптического изображения.
Устройство 27 подсветки синхронизировано с получением оптических изображений камерами 26.
Вертолет 1 также содержит автопилот 50 (схематически показан на Фигуре 2), который генерирует сигналы управления для лопастей 9. Эти сигналы управления регулируют, например, углы α установки лопастей 9 в соответствии с условиями и профилем выполняемого полета.
В одном конкретном варианте выполнения автопилот 50 принимает входные данные от блока 28 управления, содержащие значения углов α, β и γ и упругих смещений вдоль осей B, C и D лопастей 9 винта 3, и генерирует сигналы управления на основе этих значений.
Во время работы приводной вал 6 вращается вокруг оси А, приводя во вращение втулку 5 и лопасти 9.
Работа винта 3 описана ниже со ссылкой только на одну лопасть 9.
Лопасть 9, приводимая в движение втулкой 5, изменяет свое пространственное положение относительно втулки 5.
В частности, лопасть 9 поворачивается относительно втулки 5 и вокруг осей B, C и D на углы α, β и γ.
В то же время каждый поперечный участок лопасти 9 подвергается упругому смещению, например, под действием центробежной силы, имеющей компоненты, параллельные осям B, C и D.
Блок 25 обнаружения определяет пространственное положение лопасти 9 во время работы винта 3.
Точнее говоря, устройства 27 подсветки подсвечивают области рассматриваемых лопастей 9, и камеры 26 получают изображение лопастей 9 на соединительном элементе 17 и/или конце 20 лопасти 9.
Это изображение обрабатывается блоком 28 управления, который определяет пространственное положение лопасти 9.
Обратимся к Фигуре 3, винт в соответствии с другим вариантом выполнения настоящего изобретения обозначен в целом ссылочной позицией 3'. Винт 3' аналогичен винту 3, и ниже будут описаны только отличия; по возможности соответствующие или эквивалентные детали винтов 3 и 3' будут обозначены одинаковыми ссылочными позициями.
В частности, винт 3' отличается от винта 3 тем, что камеры 26' установлены на пластине 23 втулки 5, размещены в пространстве, образованном между пластиной 23 и соединительными элементами 17 соответствующих лопастей 9, и выполнены с возможностью получения изображений соответствующих соединительных элементов 17.
В показанном варианте выполнения камеры 26' представляют собой микрокамеры.
Работа винта 3' аналогична работе винта 3 и поэтому не описана подробно.
На основе изучения винта 3, 3' и способа в соответствии с настоящим изобретением очевидны преимущества, которые могут быть обеспечены.
В частности, блок 25 обнаружения выполнен с возможностью получения изображений, связанных с пространственными положениями лопастей 9 относительно втулки 5, т.е. значения углов α, β и γ и жестких или упругих смещений участков лопастей 9.
Из этого следует, что блок 25 обнаружения может определять значение поворотов и/или смещений, соответствующих всем степеням свободы вращательного или поступательного движения лопастей 9.
Это определение всех степеней свободы лопастей 9 выполняется с использованием небольшого количества компонентов и, следовательно, не требует использования дополнительных конструкций или датчиков на лопастях 9, которые могут влиять на динамическое и аэродинамическое поведение.
В дополнение, блок 25 обнаружения работает бесконтактным образом и, следовательно, отличается высокой надежностью.
Блок 25 обнаружения может быть легко применен в отношении разных типов винтов 3 и 3', таких как, например, полностью шарнирные, полужесткие или жесткие винты 3 и 3', либо с физическими шарнирами, либо бесшарнирные.
Кроме того, блок 25 обнаружения выполнен с возможностью определения значения упругого смещения участков лопастей 9 вдоль соответствующих осей B относительно втулки 5. В случае, когда лопасти 9 шарнирно соединены с втулкой 5 с помощью эластомерных подшипников 24 в бесшарнирных винтах или с помощью эластомерных элементов в бесподшипниковых винтах, эти смещения указывают степень износа и повреждения вышеуказанных эластомерных компонентов. Из этого следует, что блок 25 обнаружения выполнен с возможностью обеспечения индикации рабочего состояния этих эластомерных подшипников 24 в режиме реального времени.
Наконец, пространственное положение лопастей 9, определенное блоком 25 обнаружения, может эффективно использоваться в качестве входных данных для автопилота 50 вертолета 1. Таким образом, автопилот 50 обрабатывает сигналы, связанные с винтом 3 или 3', которые имеют более высокую полосу пропускания, чем сигналы, связанные с пространственным положением фюзеляжа 2, и широко используются в качестве входных данных для автопилота 50. В результате, автопилот 50 имеет улучшенные характеристики скорости и точности, чем автопилоты известного типа, обычно используемые в вертолетах известного типа.
Наконец, также следует понимать, что в отношении вышеописанного винта 3 или 3' и способа могут быть выполнены модификации и изменения без отклонения от объема настоящего изобретения.
В частности, блок 25 обнаружения может быть применен в отношении хвостового винта 4 вместо винта 3 или 3'.
Вместо полностью шарнирного винта 3 может быть использован жесткий винт, полужесткий винт, винт на кардане, бесшарнирный винт или бесподшипниковый винт, а также любой другой винт, выполненный с возможностью обеспечения вышеуказанных степеней свободы лопастей 9 посредством жестких или упруго деформируемых соединений, отличных от винта 3 или 3'.
Винт 3 или 3' может быть применен в отношении конвертоплана или конфигураций, полученных на основе вертолета.
Вертолет с подавляющей шум и вибрацию трансмиссионной установкой
Уплотнительное кольцо
Летательный аппарат, содержащий устройство для отображения пространственного положения летательного аппарата по отношению к фиксированному направлению в пространстве
Устройство демпфирования вибрации и способ демпфирования для винта воздушного судна, допускающего зависание

