Результат интеллектуальной деятельности: Мультироторный летательный аппарат
Вид РИД
Изобретение
Изобретение относится к области воздухоплавания, а именно, к летательным аппаратам с вертикальными взлетом и посадкой.
Известен мультироторный летательный аппарат, с вертикальными взлетом и посадкой, содержащий несущий каркас с установленными на нем воздушными винтами и соединенный с несущим каркасом корпус, в котором размещено транспортируемое аппаратом оборудование, в частности, аппаратуру наблюдения, приема и передачи сигнала, при этом корпус жестко соединен с несущим каркасом (US 2016/0340028 А1, опуб., 24.11.2016).
Недостатками известного летательного аппарата являются ухудшенная приемистость при смене пространственного положения аппарата, связанная с большой массой и моментом инерции оборудования, размещенного в его корпусе.
Известен летательный аппарат, содержащий единый корпус с установленными на нем воздушными винтами, при этом воздушные винты связаны с корпусом при помощи универсальных шарниров, а также звеньев управления взаимным положением воздушных винтов и корпуса (2278800 С2, опуб., 01.01.2000).
Недостатками известного аппарата являются невозможность самоустановки корпуса относительно несущей системы с воздушными винтами, что не позволяет быстро изменять пространственное положение аппарата.
Техническим результатом является повышение приемистости и маневренности летательного аппарата.
Поставленная задача достигается тем, что в мультироторном летательном аппарате с вертикальными взлетом и посадкой, содержащем, по меньшей мере, один несущий каркас с установленными на нем, по меньшей мере, двумя воздушными винтами и, по меньшей мере, один соединенный с несущим каркасом корпус, в котором размещено транспортируемое аппаратом оборудование, согласно изобретению, корпус соединен с несущим каркасом при помощи универсального шарнира с возможностью обеспечения свободной самоустановки положения корпуса относительно несущего каркаса.
Поставленная задача достигается также тем, что он может быть снабжен датчиком пространственного положения несущего каркаса относительно поверхности земли.
Поставленная задача достигается также тем, что несущий каркас может быть связан с корпусом при помощи дополнительных звеньев с возможностью принудительного изменения пространственного положения корпуса относительно несущего каркаса и фиксации взаимного положения корпуса и несущего каркаса, а также с возможностью обеспечения свободной самоустановки положения корпуса относительно несущего каркаса за счет рассогласования взаимного расположения элементов дополнительного звена.
Поставленная задача достигается также тем, что дополнительные звенья могут быть выполнены в виде тяг с регулируемой длиной, расположенных в пересекающихся плоскостях, либо дополнительные звенья выполнены в виде поворотных механизмов, оси вращения которых скрещиваются или пересекаются.
Изобретение поясняется при помощи чертежей.
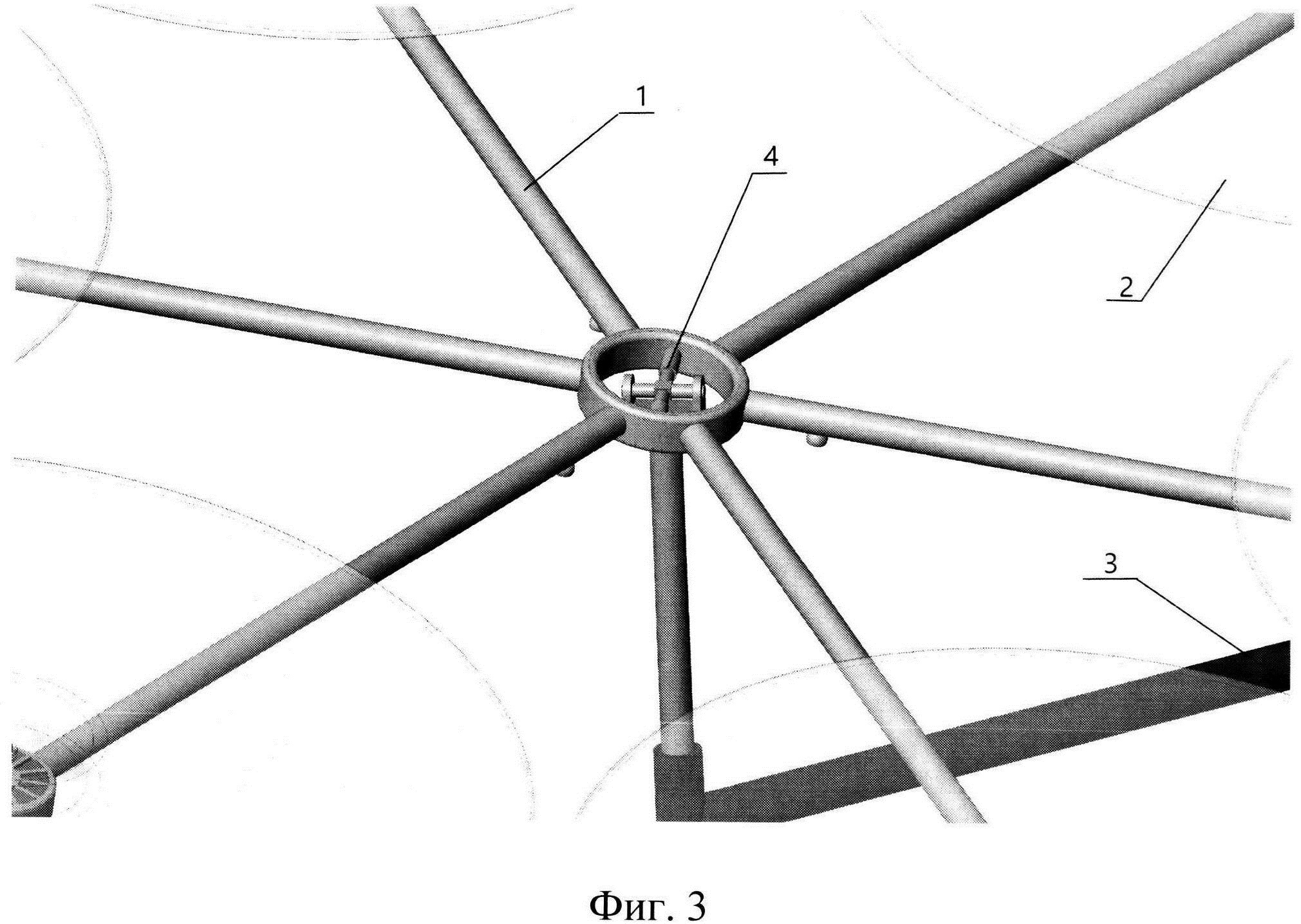
На фиг. 1 показан общий вид спереди на аппарат;
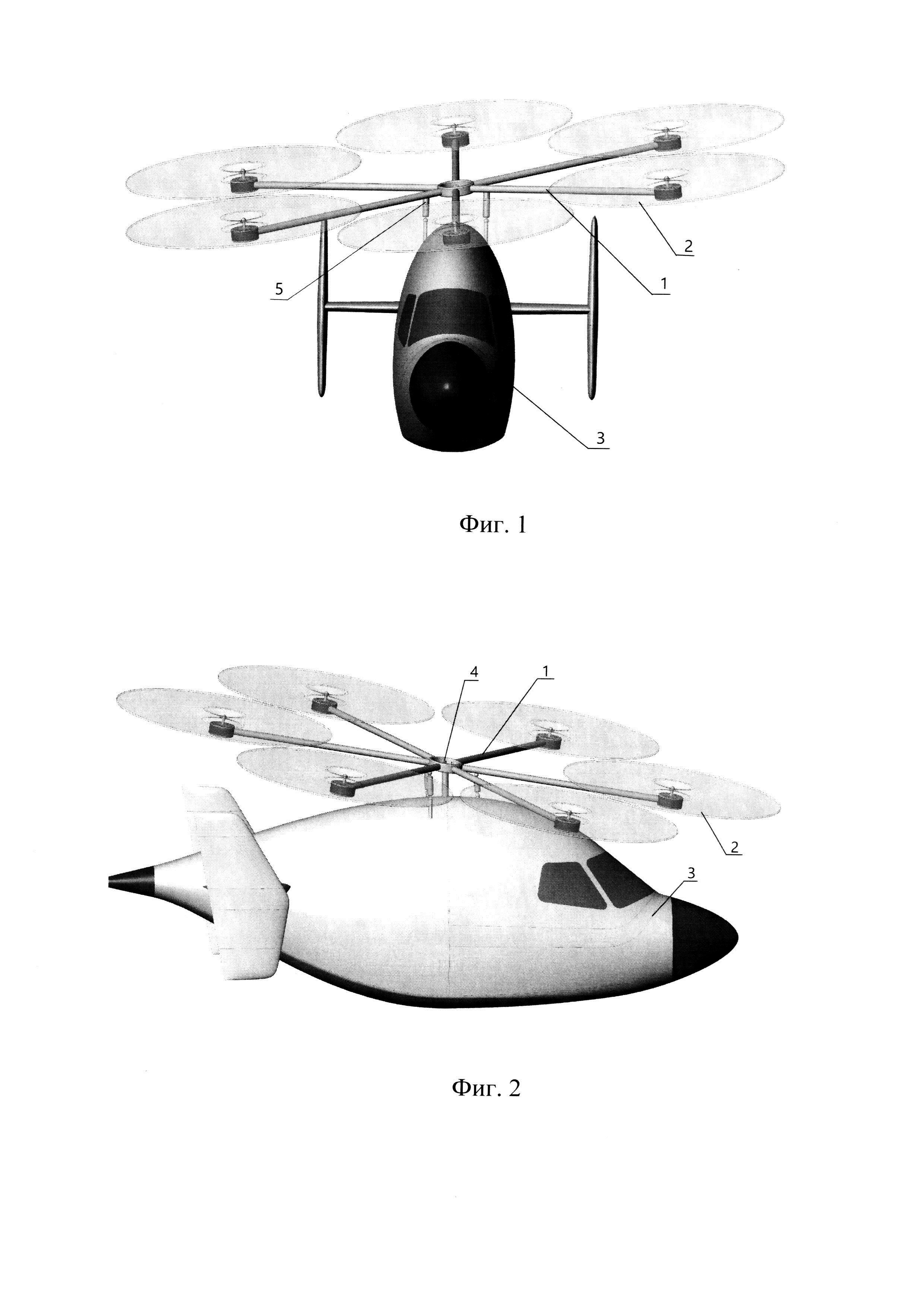
На фиг. 2 - то же, вид сбоку;
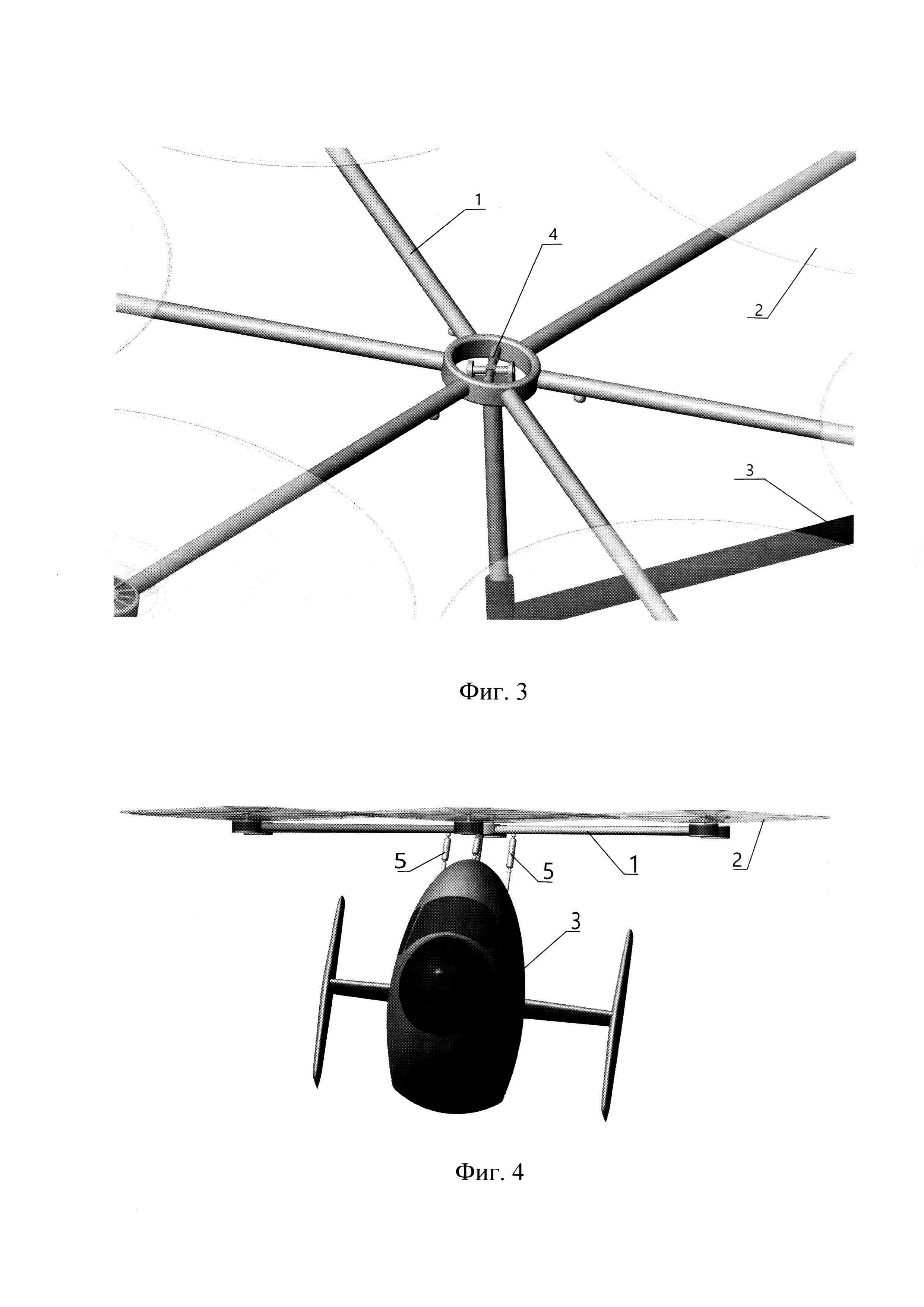
На фиг. 3 - узел связи несущего каркаса с корпусом аппарата;
На фиг. 4 показан аппарат с нарушением центровки из-за отказа двигателя;
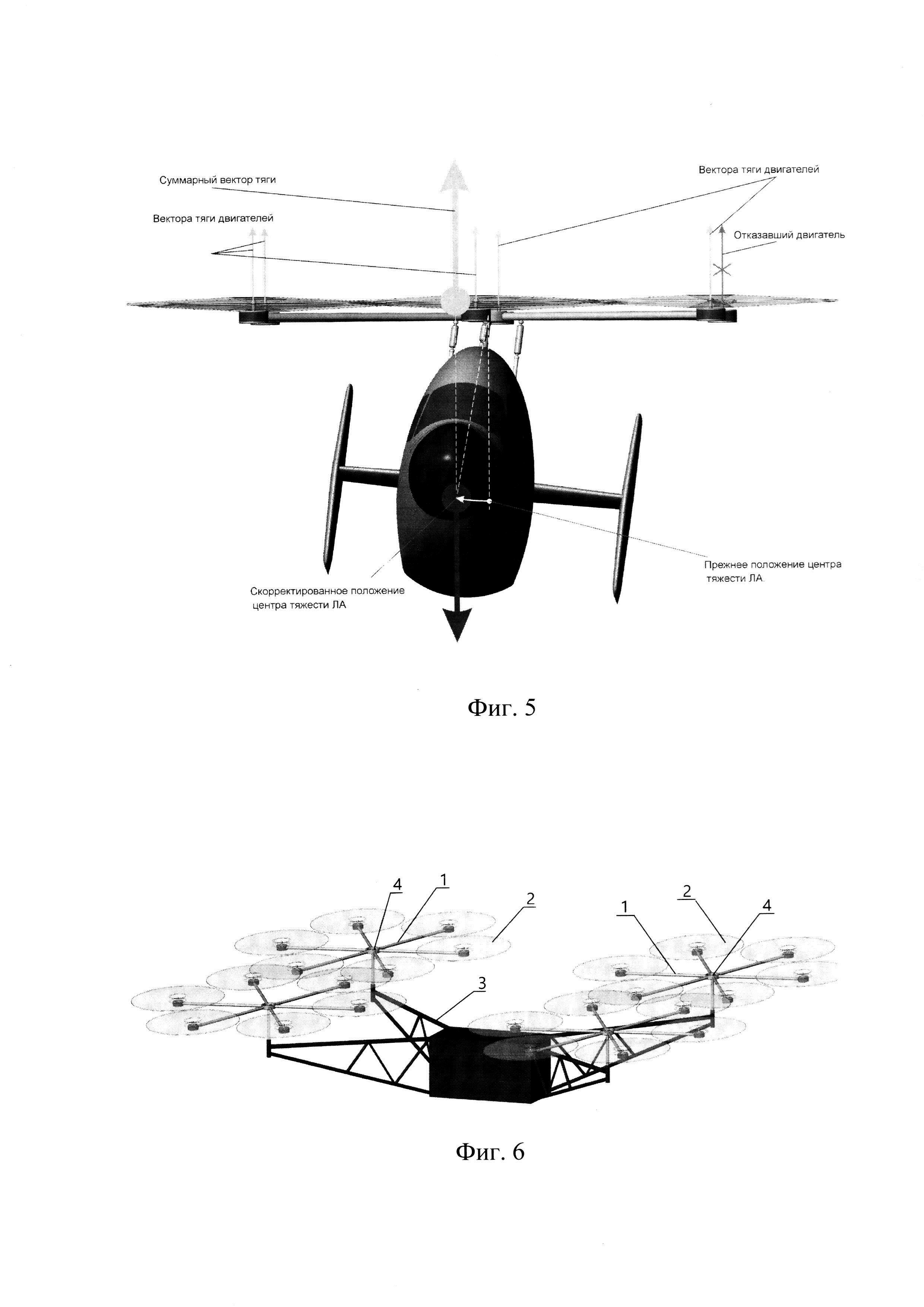
На фиг. 5 - то же, показано направление действия сил в случае нарушения центровки.
На фиг. 6 показан пример выполнения аппарата, корпус которого связан с несколькими несущими каркасами.
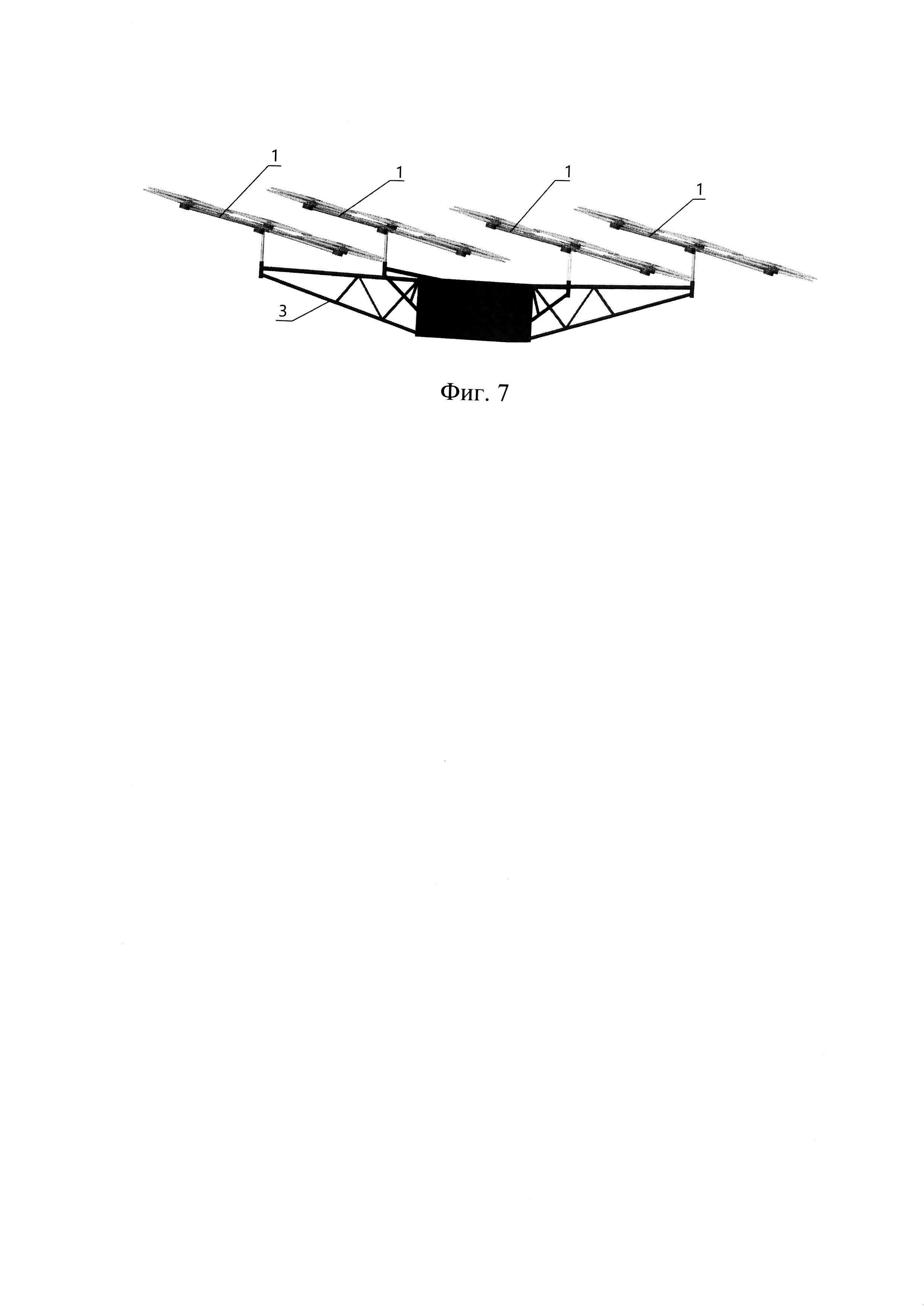
На фиг. 7 - то же, с измененным положением несущих каркасов относительно корпуса.
Летательный аппарат содержит несущий каркас 1 с установленными на нем воздушными винтами 2, корпус 3, соединенный с несущим каркасом 1 при помощи универсального шарнира 4. В корпусе 3 размещено транспортируемое аппаратом оборудование, например, аппаратуру наблюдения, приема и передачи сигнала.
Несущий каркас 1 может быть связан с корпусом 3 при помощи дополнительных звеньев с возможностью принудительного изменения пространственного положения корпуса 3 относительно несущего каркаса и фиксации взаимного положения корпуса и несущего каркаса 1. При этом дополнительные звенья могут быть выполнены в виде линейных тяг 5 с регулируемой длиной, расположенных в пересекающихся плоскостях. Либо дополнительные звенья выполнены в виде поворотных механизмов (на чертежах не показаны), оси вращения которых скрещиваются или пересекаются.
Аппарат может быть снабжен датчиком (на чертежах не показан) пространственного положения несущего каркаса относительно поверхности земли.
Описываемый летательный аппарат используется следующим образом. Аппарат взлетает и осуществляет посадку в вертикальном направлении за счет тяги воздушных винтов 2. Привод винтов может быть выполнен электрическим, при этом электродвигатели могут быть скомпонованы вместе с винтами, либо крутящий момент может передаваться на винты при помощи механических передач. Привод может быть выполнен в виде тепловых двигателей, непосредственно приводящих воздушные винты, или с помощью гибридной двигатель-электрической силовой установки.
Изменение направления полета или пространственного положения аппарата относительно поверхности земли осуществляется за счет изменения силы тяги одного воздушного винта или группы винтов за счет изменения частоты вращения или шага винта. При необходимости изменения положения аппарата в пространстве (углового или линейного) значительная инерционная масса корпуса, в случае применения классических коптеров с жесткой связью несущего каркаса и корпуса, не позволяет осуществить эту операцию быстро.
Наличие универсального шарнира 4 в механической связи корпуса 3 с несущим каркасом 1 позволяет быстро изменить положение несущего каркаса 1 с винтами 2 относительно поверхности земли и относительно инертного корпуса 3 и сменить за счет этого зону размещения аппарата. То есть наличие универсального шарнира 4 обеспечивает свободную самоустановку корпуса 3 относительно несущего каркаса 1 во всех направлениях.
Наличие дополнительных звеньев связи корпуса 3 и несущего каркаса 1 обеспечивает принудительное изменение положения корпуса 3 относительно несущего каркаса 1. При этом указанные дополнительные звенья не препятствуют свободной самоустановке корпуса 3 и несущего каркаса 1 на соответствующих режимах полета, так как выполнены с возможностью изменения либо длины (в случае применения линейных тяг 5), либо углового положения (поворотные механизмы), а также фиксации или свободного, рассогласованного взаимного положения элементов дополнительного звена.
Например, в случае отказа одного или нескольких двигателей, система управления аппаратом осуществляет принудительное изменение положения корпуса 3 относительно несущего каркаса 1 с целью приведения центра тяжести аппарата в центр действия суммарного вектора тяги винтов 2, изменяющего свое положение в случае отказа винтов 2 или под действием других факторов (см. фиг. 5).
При использовании нескольких несущих каркасов 1 (как показано на фиг. 7) каждый имеет возможность изменить свое положение относительно корпуса 3 и занять оптимальное положение с точки зрение затрат энергии на маневрирование аппарата или для иных целей.
Таким образом, описываемое изобретение позволяет обеспечить приемистость и маневренность летательного аппарата, а также безопасность в случае неожиданного внешнего воздействия или при отказе привода части воздушных винтов.
Винтокрыл
Блок электрической аппаратуры
Способ монтажа полупроводниковых элементов
Закрытая электрическая машина с внутренним неподвижным якорем
Воздушный винт со складывающимися лопастями
Закрытая электрическая машина
Способ регулирования перистальтического насоса
Способ регулирования перистальтического насоса
Винтокрыл
Электрическая машина
Блок электрической аппаратуры
Закрытая электрическая машина с внутренним неподвижным якорем
Воздушный винт со складывающимися лопастями
Закрытая электрическая машина

