Результат интеллектуальной деятельности: Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано для уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата (КА).
Известен способ прогнозирования движения центра масс навигационного КА, включающий прогнозирование ухода центра масс навигационного КА от номинального положения под действием внешних возмущающих сил [Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Чеботарев В.Е., Косенко В.Е., Сиб. гос. аэрокосмич. ун-т. - Красноярск, 2011. с. 41-52].
При работе по целевому назначению навигационный КА осуществляет заданную ориентацию путем поворота КА вокруг центра масс. Движение КА вокруг центра масс приводит к возникновению сил, которые оказывают влияние на движение самого центра масс КА. Если движение КА вокруг центра масс прогнозируемо, то и силы прогнозируемы, и, как следствие, движение центра масс КА тоже прогнозируемо.
Задачей баллистического центра является прогнозирование движения центра масс навигационного КА. Погрешность ориентации панелей солнечных батарей (СБ) на Солнце приводит к непрогнозируемым силам от солнечного давления, которые вносят вклад в погрешность прогнозирования движения центра масс навигационного КА.
При работе по целевому назначению навигационные КА ориентированы в солнечно-земной системе координат (ось ОХ КА ориентирована по местной вертикали, ось OY КА ориентирована в плоскости Солнце - космический аппарат - Земля, ось OZ КА дополняет систему координат до правой), при этом нормали к панелям солнечных батарей ориентированы на Солнце путем разворотов относительно оси OZ с помощью приводов СБ.
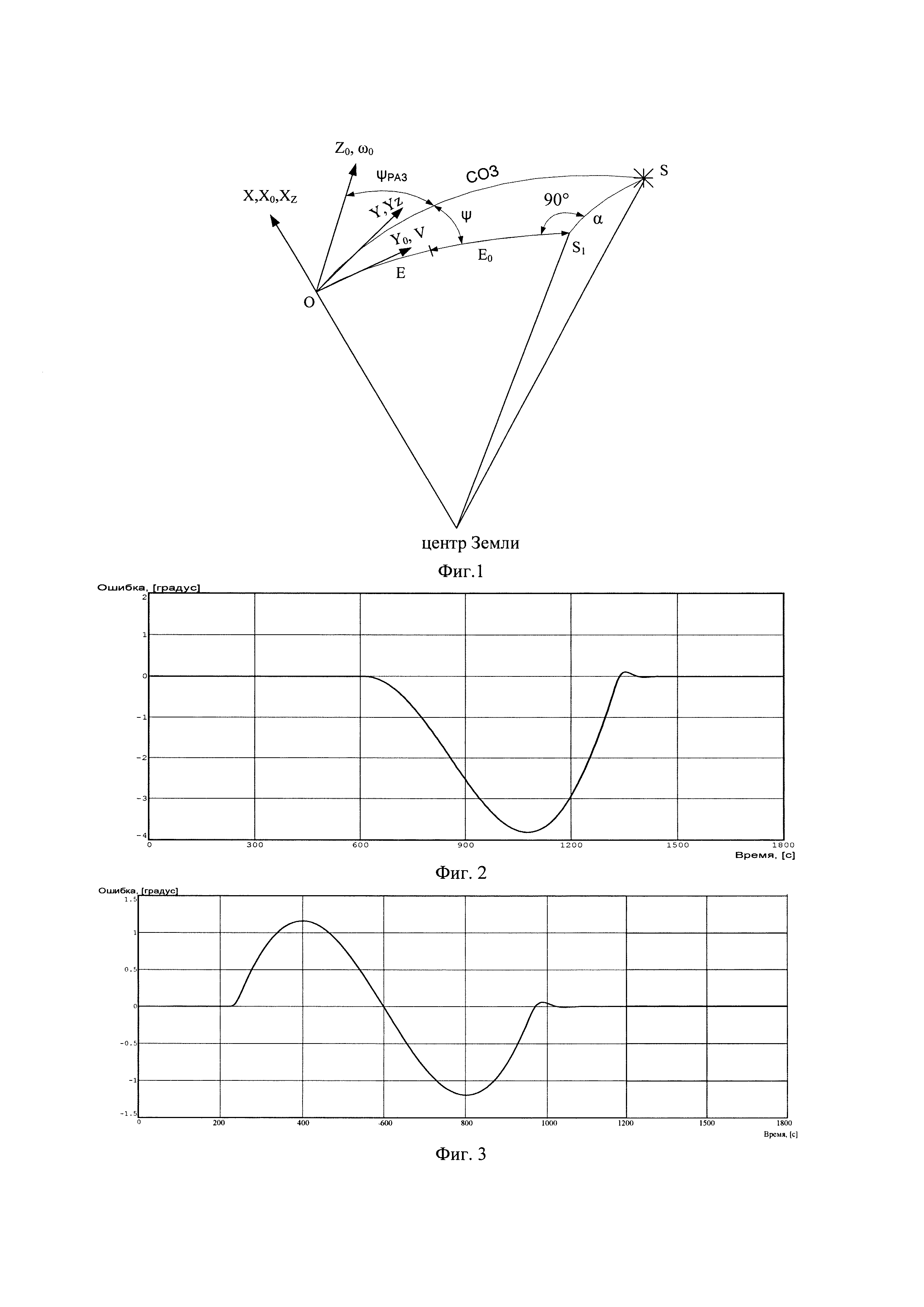
Ориентация КА в солнечно-земной системе координат иллюстрирована на фиг. 1, на которой обозначено: СОЗ - угол Солнце - объект (космический аппарат) - Земля; α - угол между плоскостью орбиты и направлением на Солнце; О - центр масс КА; S - направление на Солнце; S1 - проекция направления на Солнце на плоскость орбиты; Е - угол от текущего положения КА на орбите до точки орбиты, в которой угол СОЗ максимален; Е0 - угол от точки по орбите, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален; ψ - курсовой угол (текущий угол между осью OYO и плоскостью СОЗ); ψРАЗ - угол разворота вокруг оси ОХ в процессе движения по орбите от текущего положения плоскости СОЗ до оси OZO; ω0 - орбитальная угловая скорость КА; V - линейная скорость КА; OXOYOZO - орбитальная система координат (OXO - направлена по текущему радиус-вектору изделия от Земли, OYO - направлена по вектору линейной скорости КА, OZO - дополняет систему координат до правой); OXZYZZZ - солнечно-земная система координат (OXZ - совпадает с OXO, OYZ - лежит в плоскости СОЗ и направлена в сторону Солнца, OZZ - дополняет систему координат до правой); OXYZ - связанная с КА система координат.
SOZ - угол СОЗ.
Скорость вращения плоскости СОЗ (ωSOZ) определяется по формуле (1) с помощью фиг. 1.

Вывод формулы (1):
Из сферического треугольника OSS1 на фиг. 1 имеем:

Дифференцируя (2) и полагая, что α'=0 и Е'=ω0, получим:

Из сферического треугольника OSS1 на фиг. 1 имеем:
Подставляя (7) в (3), получим формулу (1).
Из формулы (1) следует, что при угле α между плоскостью орбиты и направлением на Солнце, близком к нулю, скорость вращения плоскости СОЗ близка к нулю. Однако в точке Е=0° (180°) скорость вращения плоскости СОЗ стремится к бесконечности.
Таким образом, отслеживание плоскости СОЗ при прохождении максимальных углов СОЗ (в диапазоне от 178° до 180°) с использованием исполнительных органов системы ориентации без ошибки невозможно.
На фиг. 2, 3 показаны процессы отслеживания плоскостью XOY плоскости СОЗ при прохождении КА максимальных углов СОЗ без упреждения и с упреждением при угле α=0°.
Из рассмотрения фиг. 2, 3 видно, что без упреждения ошибка ориентации панелей СБ на Солнце получается существенно больше, чем с упреждением. Поскольку на навигационных КА устанавливается одностепенной привод СБ, который осуществляет ориентацию панелей СБ в плоскости XOY, то при развороте КА вокруг оси ОХ также возникает погрешность ориентации панелей СБ на Солнце в плоскости XOZ.
Погрешность ориентации панелей СБ на Солнце приводит к изменению сил от солнечного давления, действующих на КА, при этом силы от солнечного давления при развороте КА без упреждения больше чем с упреждением, потому что проекции сил от солнечного давления на ось OYO орбитальной системы координат, совпадающей с вектором линейной скорости КА, при упреждающем развороте относительно точки максимального угла СОЗ компенсируются.
Изменение сил от солнечного давления приводит к увеличению погрешность прогнозирования движения центра масс КА.
Основным недостатком способа прогнозирования движения центра масс навигационного космического аппарата, описанного выше, является, что в баллистическом центре при прогнозировании движения центра масс навигационного КА не учитываются развороты вокруг оси ОХ при прохождении максимальных углов СОЗ.
Выходом из сложившейся ситуации может быть моделирование в баллистическом центре упреждающего разворота относительно точки максимального угла СОЗ.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является способ прогнозирования движения центра масс навигационного КА, включающий определение ухода центра масс навигационного КА от номинального положения под действием внешних возмущающих сил [Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Чеботарев В.Е., Косенко В.Е; Сиб. гос. аэрокосмич. ун-т. - Красноярск, 2011. с. 41-52].
Описанный способ принят за прототип изобретения.
Недостатки прототипа:
Во время прохождения максимальных углов СОЗ при прогнозировании ухода центра масс навигационного КА от номинального положения не учитывается упреждающий разворот, что приводит к увеличению погрешности прогнозирования движения центра масс КА.
Таким образом, целесообразно, при прохождении максимальных углов СОЗ учитывать упреждающий разворот вокруг оси ОХ КА. Это позволит уменьшить погрешность прогнозирования движения центра масс навигационного КА.
В основу настоящего изобретения положена задача создания способа, позволяющего уменьшить погрешность прогнозирования движения центра масс навигационного космического аппарата.
Поставленная задача решается следующим образом.
Заявлен способ прогнозирования движения центра масс навигационного космического аппарата, включающий прогнозирование ухода центра масс навигационного космического аппарата от номинального положения под действием внешних возмущающих сил, отличающийся тем, что при модуле угла между плоскостью орбиты и направлением на Солнце меньше заданного значения, в наземном баллистическом комплексе на каждом витке рассчитывают угол между плоскостью орбиты и направлением на Солнце на момент начала упреждающего разворота вокруг оси ОХ, по рассчитанному углу с помощью табличных зависимостей определяют параметры упреждающего разворота вокруг оси ОХ, вычисляют времена начала и окончания упреждающего разворота вокруг оси ОХ, осуществляют моделирование упреждающего разворота вокруг оси ОХ с последующим расчетом сил от солнечного давления, влияющих на движение центра масс космического аппарата.
Сущность изобретения.
С целью уменьшения погрешности прогнозирования движения центра масс навигационного КА при модуле угла между плоскостью орбиты и направлением на Солнце меньше заданного значения (2) на каждом витке в баллистическом центре выполняется моделирование упреждающего разворота.
Для моделирования упреждающего разворота вокруг оси ОХ (далее по тексту упреждающий разворот) в баллистическом центре необходимо знать следующие параметры упреждающего разворота:
- время начала упреждающего разворота (ТН);
- время окончания упреждающего разворота (ТК);
- угловая скорость КА относительно оси ОХ на момент начала упреждающего разворота (ωН);
- угол упреждающего разворота (ψRAZV);
- значение курсового угла на момент начала упреждающего разворота (ψН);
- максимальная скорость разворота КА вокруг оси ОХ (ωn - константа);
- угловое ускорение КА при проведении разворота (ω' - константа);
- угол между положением КА на орбите в момент включения упреждающего разворота и точкой максимального угла СОЗ (Е0).
Кинематические параметры упреждающего разворота зависят только от угла α между плоскостью орбиты и направлением на Солнце. При одном и том же угле α,
реализованном в различное время, параметры упреждающего разворота будут одинаковы, за исключением времени начала и конца упреждающего разворота.
Поэтому, если провести расчет таблиц зависимостей параметров упреждающего разворота от угла α между плоскостью орбиты и направлением на Солнце то, зная угол αН между плоскостью орбиты и направлением на Солнце в момент включения упреждающего разворота, можно получить параметры упреждающего разворота, описанные выше.
Продолжительность упреждающего разворота не превышает 15 минут. Примерно за 10 минут до прохождения максимального угла СОЗ определяется угол αН по формуле:

где:
αT - текущее значение угла между плоскостью орбиты и направлением на Солнце;
α' - скорость изменения угла между плоскостью орбиты и направлением на Солнце;
Tnp - время прохождения спутника по орбите от текущей точки орбиты до точки орбиты, в которой включается упреждающий разворот.

где:
ET - угловое расстояние по орбите от текущей точки до точки, в которой угол СОЗ максимален;
Е0 - угловое расстояние по орбите от точки, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален (определяется из таблицы 1 по углу αT);
ω0 - орбитальная угловая скорость (константа).
По углу αН из табличных зависимостей (таблица 1) определяются параметры упреждающего разворота:
- угловая скорость КА относительно оси ОХ на момент начала упреждающего разворота (ωН);
- угол упреждающего разворота (ψRAZV);
- угол между положением КА на орбите в момент включения упреждающего разворота и точкой максимального угла СОЗ (Е0).
Время начала и окончания упреждающего разворота определяются по формулам:

где:
OTEK - текущее время;
ET - угловое расстояние по орбите от текущей точки до точки, в которой угол СОЗ максимален;
Е0 - угловое расстояние по орбите от точки, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален (определяется из таблицы 1 по углу
ω0 - орбитальная угловая скорость (константа).
Значение курсового угла ψH на момент начала упреждающего разворота определяется по формуле:

где:
VRAZV - угол упреждающего разворота (таблица 1);
αH - значение угла между плоскостью орбиты и направлением на Солнце на момент начала упреждающего разворота.
Модель упреждающего разворота разделена на три участка:
- участок разгона (участок набора максимальной скорости) - описывает движение космического аппарата вокруг оси ОХ при наборе максимальной скорости вращения КА. Набор поисковой скорости характеризуется наличием постоянного углового ускорения;
- участок разворота на максимальной скорости - описывает движение космического аппарата вокруг оси ОХ с постоянной максимальной скоростью вращения КА;
- участок торможения - описывает движение космического аппарата вокруг оси ОХ при уменьшении угловой скорости космического аппарата с постоянным отрицательным ускорением.
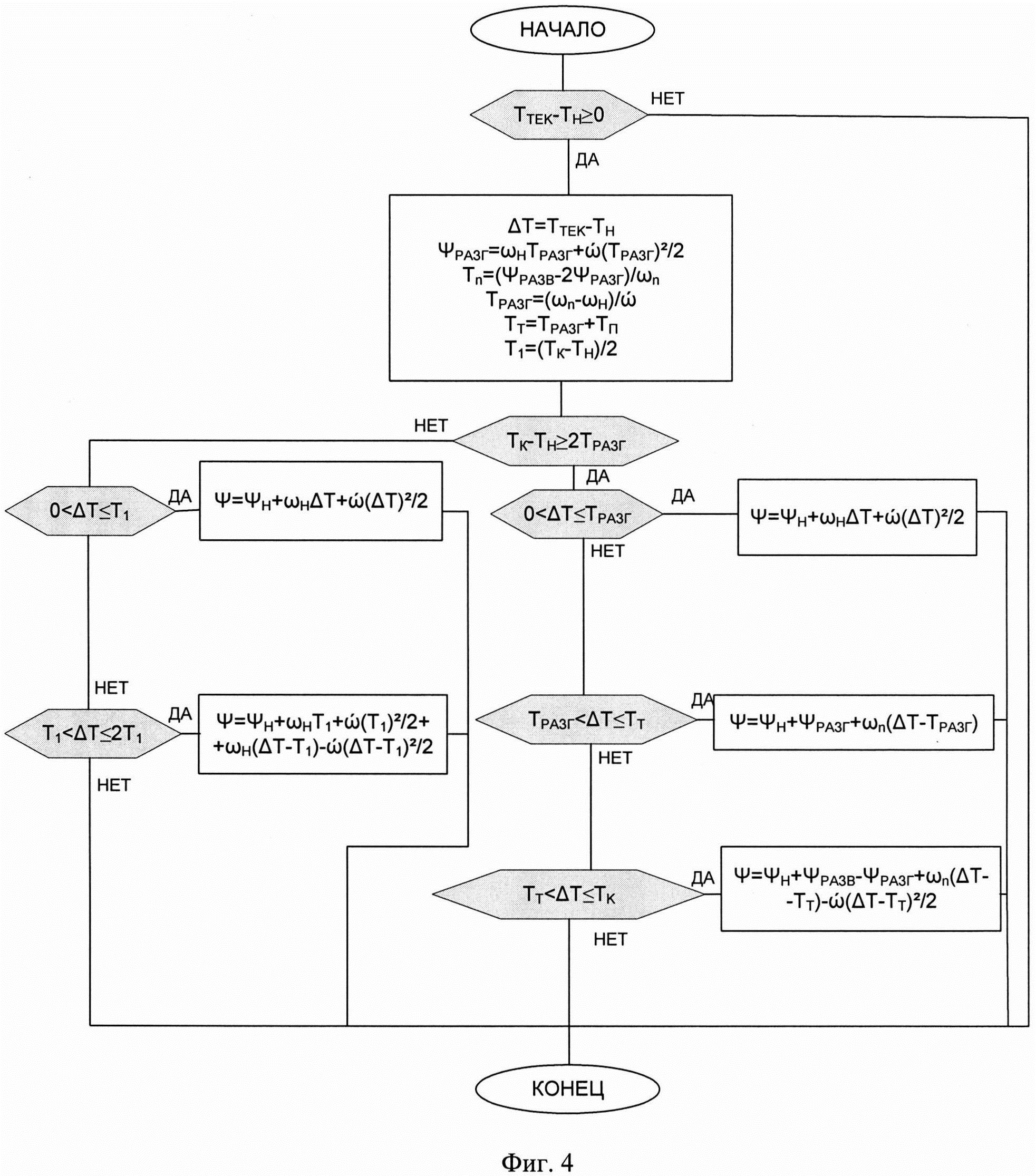
На фиг. 4 представлена блок-схема логики моделирования упреждающего разворотов вокруг оси ОХ КА в баллистическом центре.
На фиг. 4 обозначено:
ψ - текущий курсовой угол;
ωH - угловая скорость КА вокруг оси ОХ на момент начала упреждающего разворота;
ωn - максимальная угловая скорость разворота КА вокруг оси ОХ;
ψRAZV - угол упреждающего разворота;
ψRAZG - угол, пройденный на участке разгона;
TRAZG - время разгона КА относительно оси ОХ до скорости поиска;
ТН - время начала упреждающего разворота;
TK - время окончания упреждающего разворота;
Tn - время разворота на максимальной угловой скорости;
TTEK - текущее время;
ω' - угловое ускорение.
Зная текущее значение угла ψ, можно определить, например, величины проекции дополнительных сил от солнечного давления, действующих на КА при прохождении больших углов СОЗ, на оси орбитальной системы координат по следующим формулам:
Для π - ω0TP<Е<π+ω0TP:

где:
TP - время прохождения половины упреждающего разворота;
ω0 - орбитальная угловая скорость;
Fyo,Fzo - проекции сил от солнечного давления на оси орбитальной системы координат;
FS - сила от солнечного давления;
SSB - площадь панелей СБ;
h0 - удельная величина светового давления;
αS - погрешность ориентации нормали к панели СБ на Солнце;
Cs - коэффициент зеркального отражения СБ;
Cd - коэффициент диффузного отражения СБ;
ψ - текущий курсовой угол;
ET - угловое расстояние по орбите от текущей точки до точки, в которой угол СОЗ максимален.
Таким образом, заявленное изобретение позволяет сделать силы от солнечного давления, действующие на КА при прохождении максимальных углов СОЗ прогнозируемыми, что в свою очередь позволяет уменьшить погрешность прогнозирования движения центра масс КА.
Предложенный способ уменьшения погрешности прогнозирования движения навигационного космического аппарата будет применяться в баллистических центрах для прогнозирования движения центра масс КА системы «ГЛОНАСС».
Способ прогнозирования движения центра масс навигационного космического аппарата, включающий прогнозирование ухода центра масс навигационного космического аппарата от номинального положения под действием внешних возмущающих сил, отличающийся тем, что при модуле угла между плоскостью орбиты и направлением на Солнце меньше заданного значения, в наземном баллистическом комплексе на каждом витке рассчитывают угол между плоскостью орбиты и направлением на Солнце на момент начала упреждающего разворота вокруг оси ОХ, по рассчитанному углу с помощью табличных зависимостей определяют параметры упреждающего разворота вокруг оси ОХ, вычисляют времена начала и окончания упреждающего разворота вокруг оси ОХ, осуществляют моделирование упреждающего разворота вокруг оси ОХ с последующим расчетом сил от солнечного давления, влияющих на движение центра масс космического аппарата.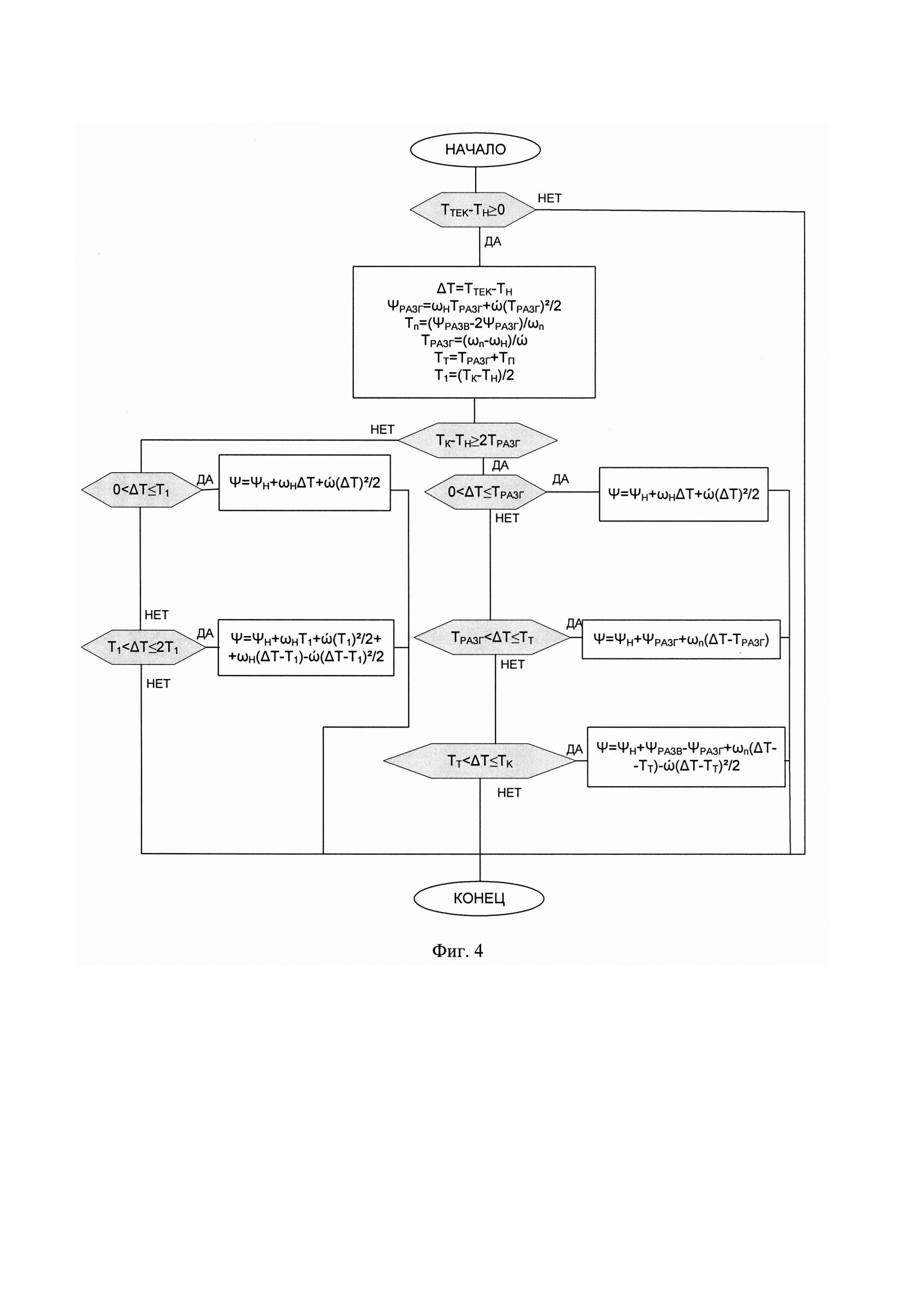
Датчик положения ротора (варианты)
Глушитель
Пьезокерамический материал
Пневмоглушитель
Комбинированный двигатель летательного аппарата
Устройство для управления процессом сканирования лазерным лучом
Миниатюрный измеритель параметров электризации космических аппаратов с микросистемным вибрационным модулятором электрического поля
Панель солнечной батареи
Устройство для управления лазерным лучом
Способ ограничения срока пассивного существования элементов космического аппарата в околоземном космическом пространстве и устройство для его осуществления
Способ ориентации космического аппарата
Способ удержания геостационарного космического аппарата
Способ ориентации космического аппарата
Способ ориентации космического аппарата

