Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области военной техники, а именно к системе управления аэродинамическими рулями ракетам, и может быть использовано при разработке управляемых ракет, противоракет и баллистических ракет.
Уровень техники
Известны конструкции систем управления и стабилизации ракет:
- Карпенко А.В. Российское ракетное оружие 1943-1993 г., справочник, издание второе, СПБ, "ПИКА", 1993, стр. 135, 145, 146;
- Авиация ПВО России и научно-технический прогресс: Боевые комплексы и системы вчера, сегодня, завтра / под ред. Е.А. Федосова, М., Дрофа, 2001, стр. 214, 215, 282, 286-290;
- Проектирование зенитных управляемых ракет / под ред. В.Г. Светлова, М., «Экслибрис-Пресс», 2013, стр. 344…451;
- Патент РФ №RU 2259536 С1, дата публикации 27.08.2004 г.
В известных конструкциях для управления ракетой используются три канала управления: по тангажу, рысканию и крену. Управление ракетой осуществляется с помощью четырех кинематически развязанных между собой аэродинамических руля с индивидуальными осями вращения. Специальная программа (или отдельное устройство) - раскладчик обеспечивает расчет и передачу управляющих сигналов каждого из каналов управления на рулевой привод каждого аэродинамического руля.
Общим недостатком такого технического решения, по-нашему мнению, является использование четырех кинематически развязанных между собой аэродинамических руля с индивидуальными осями вращения, располагаемых в одной плоскости, перпендикулярной строительной оси ракеты. Это приводит к существенному (не менее чем в 2,5 раза) укорочению длины осей вращения по сравнению с калибром ракеты, пропорциональному увеличению перерезающего момента на оси, увеличению ее диаметра и массы подшипников, уменьшению места для размещения рулевых приводов.
В качестве прототипа изобретения может быть рассмотрено техническое решение, предложенное в конструкции ракеты В-601П (5 В27У), разработанной для системы С-125:
- Эскизный проект ракеты В-601П системы С-125, кн. 1, ОКБ-2, 1960 г, стр. 111…174;
- Эскизный проект ракеты В-601П системы С-125, кн. 2, ОКБ-2, 1960, стр. 6…28, 51…58;
- Ракета 5 В27У. Техническое описание ТО-5 В27У-1-ОП. Книга 1, стр. 38…46;
- Система уточненных данных по ракете 5 В27 этапа серийного производства, п/я В-2852, 1969 г., стр. 74…127.
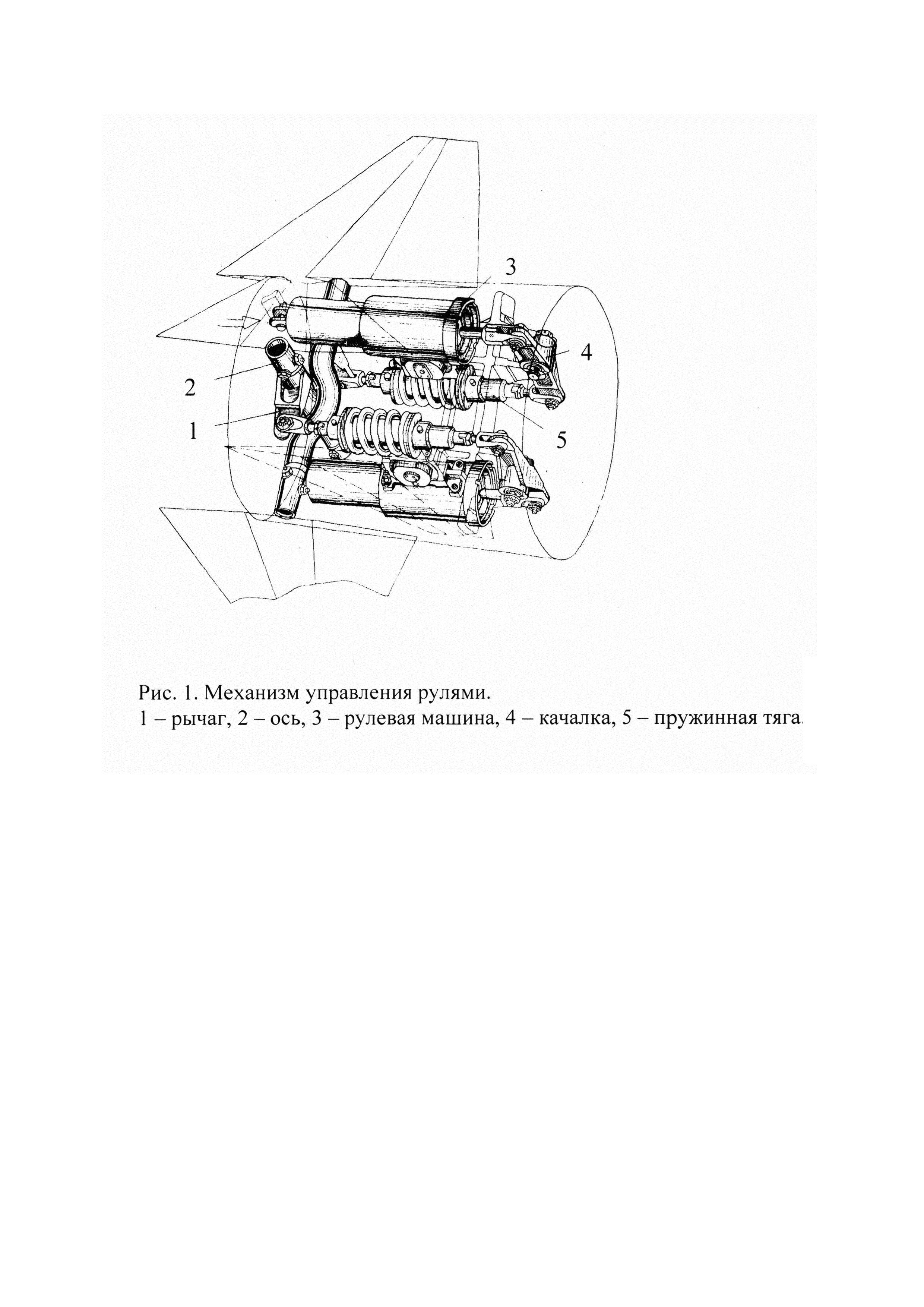
Данное техническое решение включает применение на корпусе ракеты тандемно и симметрично расположенных относительно продольной оси ракеты четырех кинематически связанных между собой по два аэродинамических руля с двумя осями вращения, имеющих длину, соизмеримую с калибром ракеты (Рис. 1 «Механизм управления рулями», где 1 - рычаг, 2 - ось, 3 - рулевая машина, 4 - качалка, 5 - пружинная тяга), что снижает срезающий момент на осях и позволяет применить оси и подшипники меньшего размера, упрощает систему управления за счет исключения с рулей задачи управления креном. Рули синхронно в каждой из плоскостей управляют полетом ракеты по каналам рыскания и тангажа.
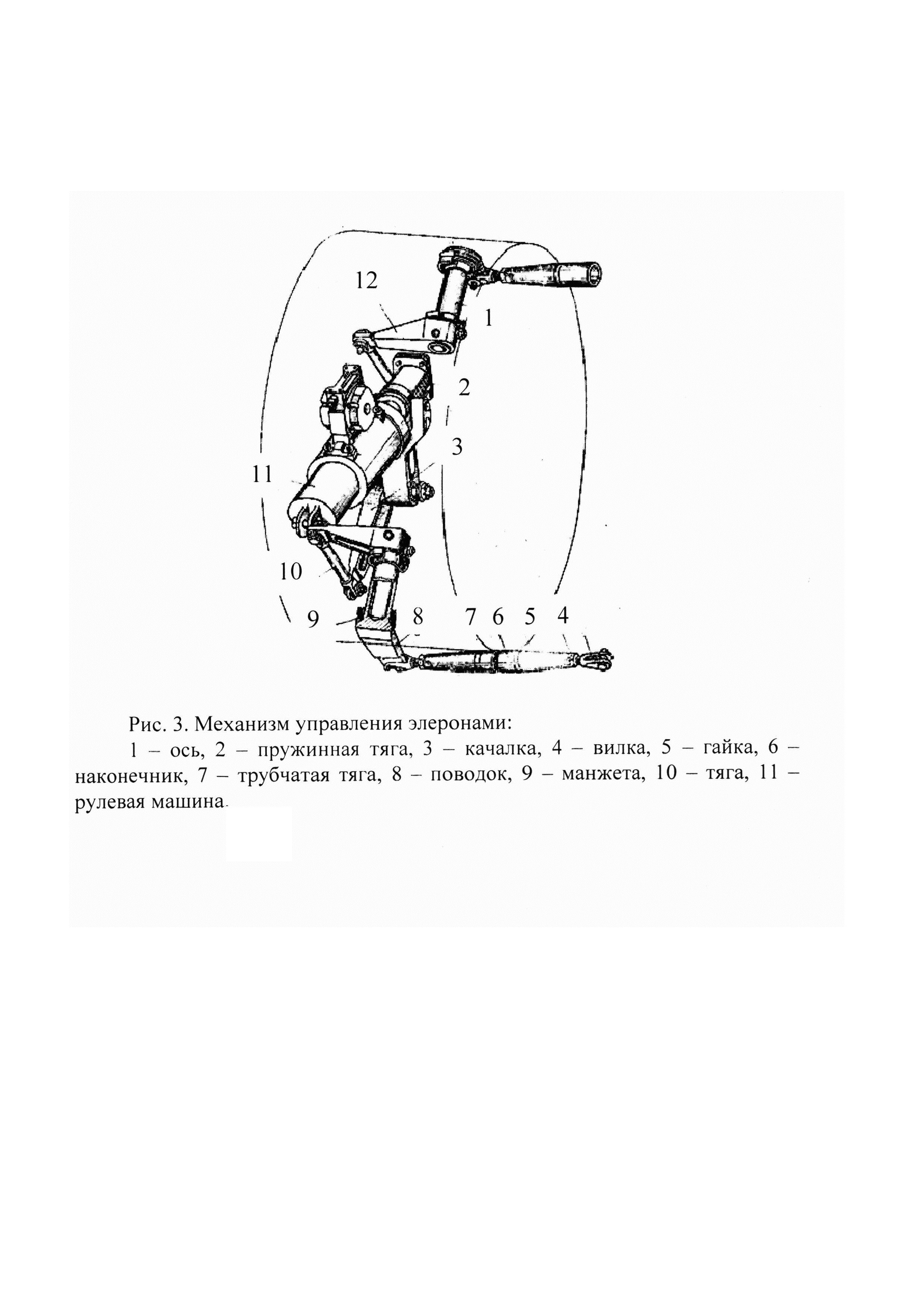
Задача управления ракетой по каналу крена возложена на элероны, размещенные на задних кромках крыльев (Рис. 2 «Крыло с элероном», где 1 - качалка, 2 - обтекатель, 3, 6, - опорный узел, 4 - элерон, 5 - сухарь, 7 - шарнирный подшипник, 8, 10 - ось, 9 - шарикоподшипник и Рис. 3. «Механизм управления элеронами», где 1 - ось, 2 - пружинная тяга, 3 - качалка, 4 - вилка, 5 - гайка, 6 -наконечник, 7 - трубчатая тяга, 8 - поводок, 9 - манжета, 10 - тяга, 11 - рулевая машина).
Недостатком прототипа изобретения является необходимость применения дополнительных устройств и механизмов управляющих креном ракеты, усложняющих и удорожающих конструкцию ракеты, увеличивающих время реакции ракеты на управляющие воздействия.
Раскрытие сущности изобретения
Сущность предлагаемого технического решения заключена отказе от управления ракетой по каналу крена. Ракета имеет возможность свободного вращения по крену. Вращение ракеты и ее строительной системы координат вокруг продольной (строительной) оси не регулируется и происходит под действием случайных возмущений.
Осуществление изобретения
Для определения текущего положения угла крена ракеты вводится условно-неподвижная система координат, положение осей которой определяется инерциальной системой, сохраняющей положение осей в пространстве. Начало координат условно-неподвижной системы координат фиксируется относительно земной системы координат в течение предстартовой подготовки ракеты на ПУ. Условно-неподвижная система координат в течение всего времени полета считается неподвижной относительно земной системы координат и используется в расчетах углового положения ракеты относительно цели и управляющих сигналов наведения по каналам рыскания и тангажа.
Положительный эффект предлагаемого технического решения заключается:
- в увеличении точности наведения ракеты за счет расширения полосы контура управления ракетой вследствие исключения из контура управления динамических звеньев управления ракетой по крену, инерционных звеньев рулевых приводов и инерционно-интегрирующего звена корпуса самой ракеты;
- существенном упрощением конструкции ракеты и ее системы управления;
- снижении массы ракеты и трудоемкости ее изготовления.
Ракета, управляемая четырьмя аэродинамическими рулями, расположенными на корпусе симметрично в одной плоскости, перпендикулярной строительной оси ракеты, отличающаяся тем, что она обеспечена возможностью свободного вращения по крену вокруг продольной оси под действием случайных возмущений и управления только по каналам тангажа и рыскания четырьмя попарно кинематически связанными между собой аэродинамическими рулями с двумя осями вращения, при этом текущее положение угла крена ракеты для расчета управляющих сигналов управления по каналам тангажа и рыскания определено в условно-неподвижной системе координат, неподвижность которой относительно земной системы координат в полете обеспечена инерциальной системой.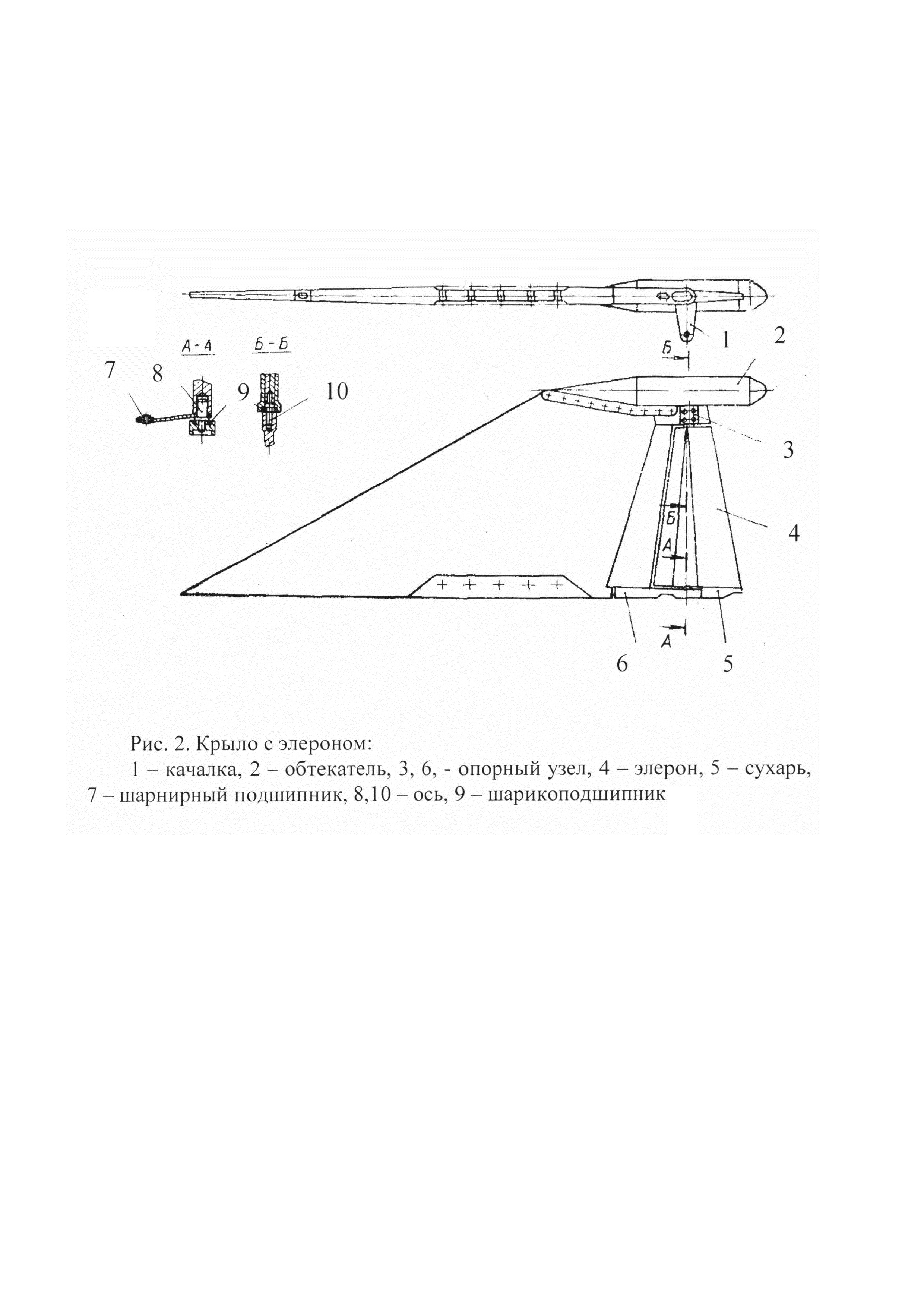
Система "антенна-обтекатель"
Механизм раскрытия и стопорения крыльев ракеты
Складной аэродинамический руль летательного аппарата
Способ старта ракеты из широкофюзеляжного носителя
Ракета
Способ вертикального воздушного запуска ракет
Управляемый снаряд
Эжекционное устройство для охлаждения оборотной воды
Ракетная часть реактивного снаряда
Эжекционное устройство для охлаждения оборотной воды
Рулевой привод управляемых ракеты и снаряда
Механизм раскрытия и стопорения крыльев ракеты
Складной аэродинамический руль летательного аппарата
Способ старта ракеты из широкофюзеляжного носителя
Ракета
Способ вертикального воздушного запуска ракет
Механизм фиксации консоли аэродинамической поверхности ракеты

