Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ГАБАРИТНОСТИ ГРУЗА ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ
Вид РИД
Изобретение
Изобретение относится к области вспомогательного железнодорожного оборудования, а именно, к системам и способам определения габаритности и объема груза открытых железнодорожных вагонов и платформ, и может быть использовано в системах видеонаблюдения на железной дороге.
На предприятиях, связанных с транспортировкой сыпучего груза в открытых вагонах, часто возникает задача контроля содержимого вагонов. Контроль объема и веса загружаемого груза важен как для корректного стоимостного расчета отгружаемого и перевозимого груза, так и для исключения перегруза вагонов, который сопряжен с возможностью не только повреждения вагонов, но и усиленного износа и даже повреждения железнодорожного полотна.
Традиционно задачу определения габаритности груза железнодорожных вагонов решают путем взвешивания вагонов как в процессе погрузки, так и до и непосредственно после погрузки или разгрузки с помощью специальных весовых платформ. Также весовые платформы используют непосредственно на стационарных погрузочных пунктах. С помощью весовых платформ производят взвешивание груза в процессе погрузки, что исключает перегруз. Однако такой подход не всегда применим, в частности, тогда, когда погрузку осуществляют с помощью мобильных погрузчиков.
При известной плотности загружаемого материала, вес груза можно определить путем измерения его объема. Для этого используют в том числе лазерные сканеры объема.
Наиболее близким к заявленному изобретению является способ определения габаритности груза железнодорожных вагонов, описанный в патенте RU2311311, в котором используют несколько пар оптоэлектронных датчиков "излучатель - приемник", измеряют время перекрытия оптического канала, измеряют скорость поезда, вычисляют длину нарушения габарита груза и габариты груза. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком способа прототипа является его дороговизна, вследствие необходимости использования нескольких пар оптоэлектронных датчиков "излучатель - приемник".
Техническим результатом заявленного изобретения является создание более дешевых системы и способа определения габаритности груза железнодорожных вагонов, за счет возможности использования всего лишь одной камеры в качестве оптоэлектронного датчика и трехмерного сканера.
Поставленный технический результат достигнут путем создания системы определения габаритности груза железнодорожных вагонов, содержащей, по меньшей мере, одну камеру 1, выход которой соединен с входом вычислительного устройства–коррелятора 2, а вход которой соединен с первым выходом устройства 4 синхронизации и считывания, второй выход которого соединен с входом дальномера 3, выход которого соединен с входом сервера 6, который также соединен с выходом вычислительного устройства – коррелятора 2, причем
- камера 1 выполнена с возможностью формирования покадрового изображения груза и передачи его в
- вычислительное устройство–коррелятор 2, которое выполнено с возможностью вычисления карт смещения точек изображения по соседним кадрам по мере смещения вагона, а также с возможностью передачи кадров изображения и карт смещения в сервер 6,
- дальномер 3 выполнен с возможностью измерения смещения вагона и передачи его в сервер 6;
- устройство 4 синхронизации и считывания выполнено с возможностью формирования сигналов синхронизации частоты съемки кадров камеры 1 с частотой измерений дальномера 3, а также с возможностью передачи сигналов синхронизации в камеру 1 и дальномер 3;
- сервер 6 выполнен с возможностью определения профиля поверхности груза, при этом вычисления, по мере смещения вагона, для каждого кадра изображения и соответствующего ему положения вагона, расстояния LA от плоскости объективов камеры 1 до текущей точки А на поверхности груза согласно выражению
LA = B*f / Р,
где
B – расстояние, на которое сместился вагон, за время, между моментами формирования двух кадров изображения груза,
f – расстояние от оптического центра объектива камеры до фоточувствительной матрицы объектива,
Р = |P1- P2| - величина сдвига проекции точки А на поверхности груза на фоточувствительную матрицу объектива камеры, за время, между моментами формирования двух кадров изображения груза;
P1, P2 – расстояния от точек A1 и A2 проекции на фоточувствительную матрицу объектива точки А на поверхности груза до оптической оси объектива на двух кадрах изображения груза, сформированных за время смещения вагона на расстояние В.
В предпочтительном варианте осуществления система содержит камеру 5 считывания бортового номера вагона, выход которой соединен с входом сервера 6 и которая выполнена с возможностью считывания бортового номера вагона и передачи его в сервер 6.
В предпочтительном варианте осуществления система содержит стереокамеру с двумя объективами, каждый из которых имеет светочувствительную матрицу, при этом стереобаза В является расстоянием между параллельными оптическими осями объективов стереокамеры.
Поставленный технический результат достигнут также путем создания способа определения габаритности груза железнодорожных вагонов, в котором
- с помощью устройства 4 синхронизации и считывания формируют сигналы синхронизации частоты съемки кадров камеры 1 с частотой измерений дальномера 3, и передают сигналы синхронизации в стереокамеру 1 и дальномер 3;
- с помощью камеры 1 формируют покадровое изображение профиля груза и передают его в
- вычислительное устройство–коррелятор 2, с помощью которого вычисляют карты смещения точек изображения по соседним кадрам по мере смещения вагона, а также передают кадры изображения и карты смещения в сервер 6;
- с помощью дальномера 3 измеряют смещение вагона и передают его в сервер 6;
- с помощью сервера 6 определяют профиль поверхности груза, при этом вычисляют по мере перемещения вагона для каждого кадра изображения и соответствующего ему положения вагона расстояния LA от плоскости объективов стереокамеры 1 до текущей точки А на поверхности груза согласно выражению LA = B*f / Р, где
B – стереобаза (расстояние смещения вагона между получением разных снимков одной камерой для виртуальной стереопары, что эквивалентно расстоянию между оптическими осями объективов для реальной стереокамеры),
f – расстояние от оптического центра объектива до фоточувствительной матрицы объектива,
Р = |P1- P2| - величина сдвига проекции точки А на поверхности груза на фоточувствительные матрицы объективов, вызванная параллаксом стереопары,
P1, P2 – расстояния от точек A1 и A2 проекции на планарные фоточувствительные матрицы объективов точки А на поверхности груза до оптических осей объективов.
В предпочтительном варианте осуществления способа с помощью камеры 5 считывания бортового номера вагона считывают бортовой номер вагона и передают его в сервер 6.
В предпочтительном варианте осуществления способа применяется реальная стереокамера при этом стереокамера имеет две или более камер, каждая из которых имеет объектив и светочувствительную матрицу, а стереобаза В является расстоянием между параллельными оптическими осями объективов.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
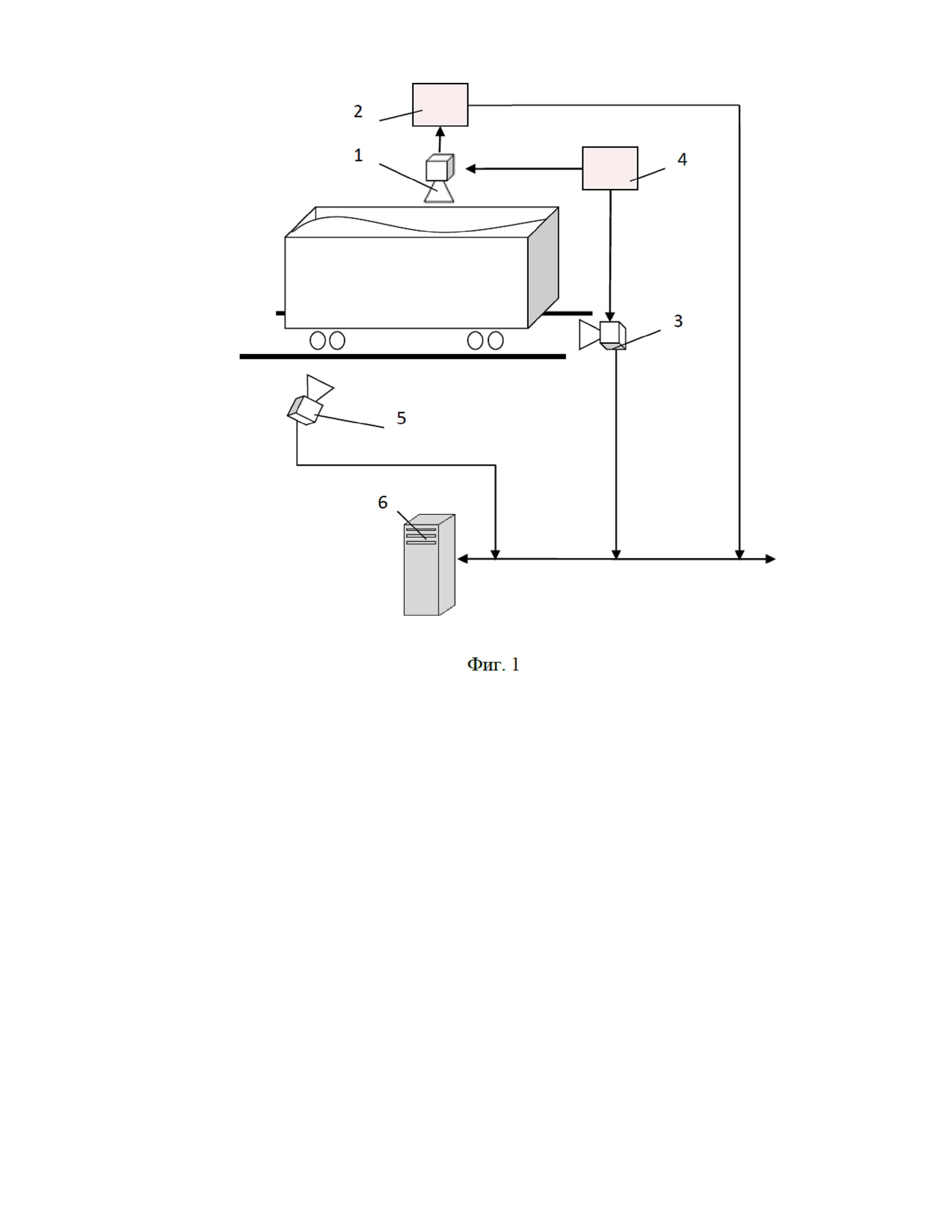
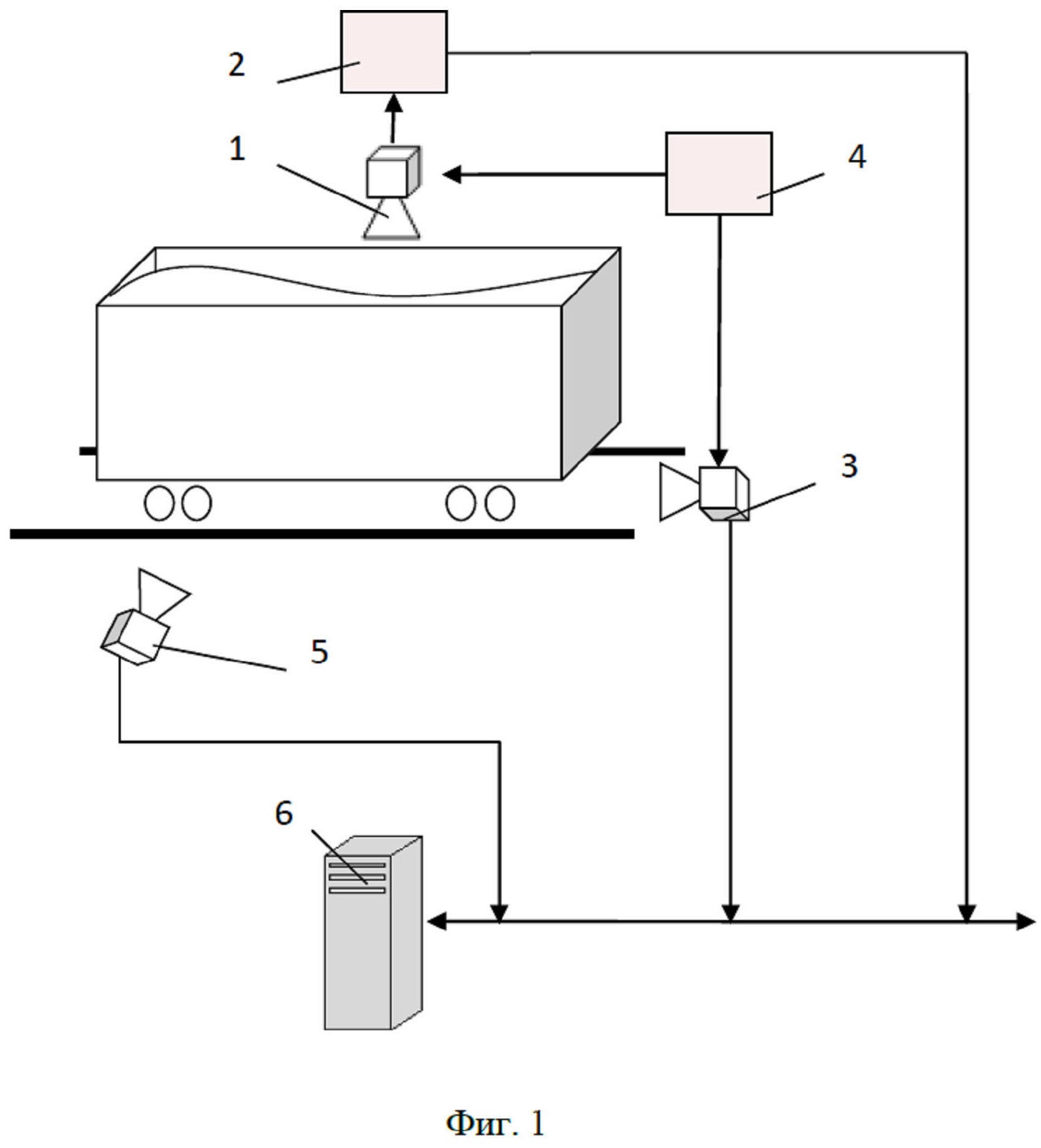
Фиг. 1. Схема принципа функционирования системы и способа определения габаритности груза железнодорожных вагонов, выполненная согласно изобретению.
Элементы:
1 –камера;
2 – вычислительное устройство–коррелятор;
3 – дальномер;
4 – устройство синхронизации и считывания;
5 – камера считывания бортового номера вагона;
6 – сервер.
Фиг. 2. Схема принципа работы варианта выполнения системы и способа определения габаритности груза железнодорожных вагонов, содержащих стереокамеру, которая состоит из двух объективов, оптические оси которых строго параллельны и смещены на расстояние B друг от друга.
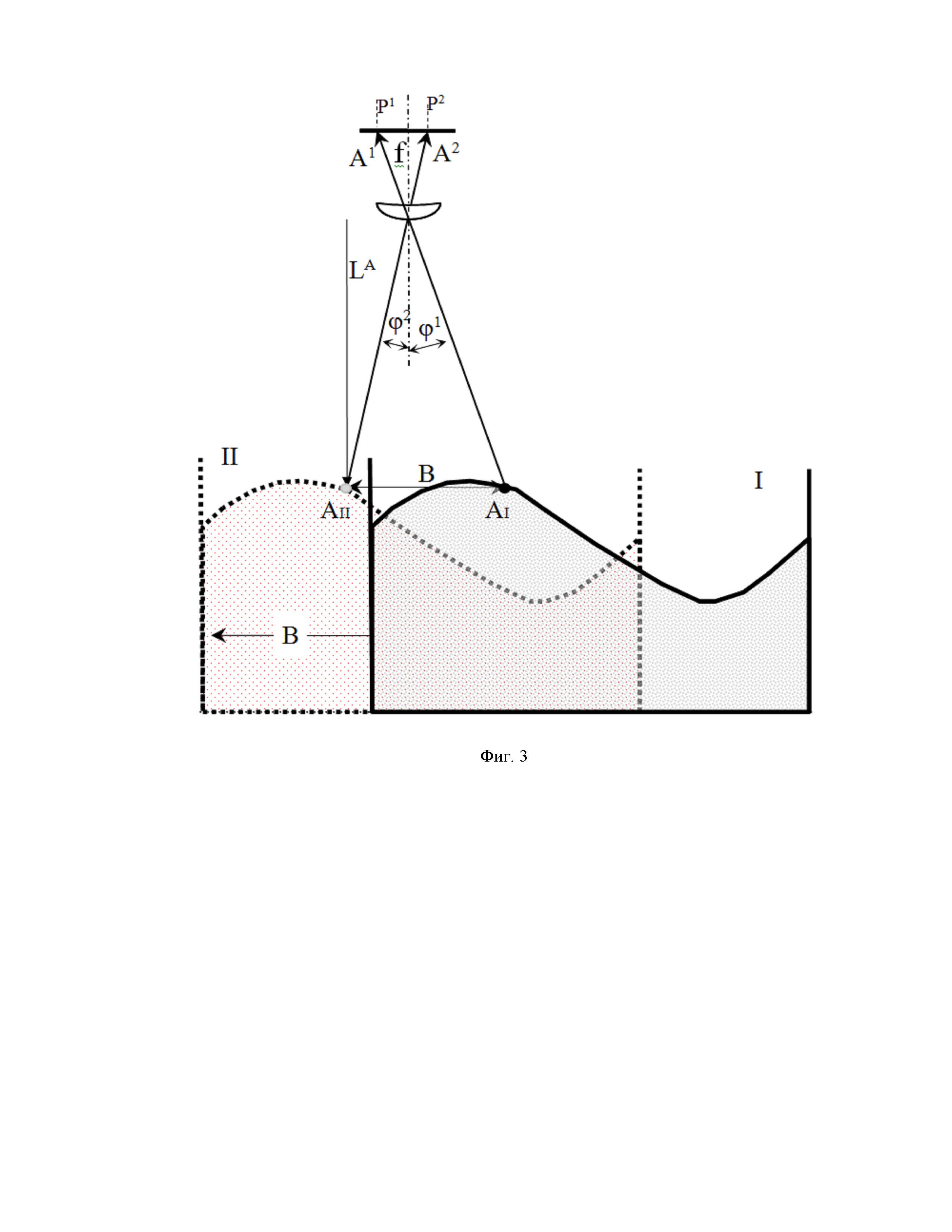
Фиг.3. Схема принципа работы варианта выполнения системы и способа определения габаритности груза железнодорожных вагонов, содержащих одну камеру, при смещении вагона на расстояние B.
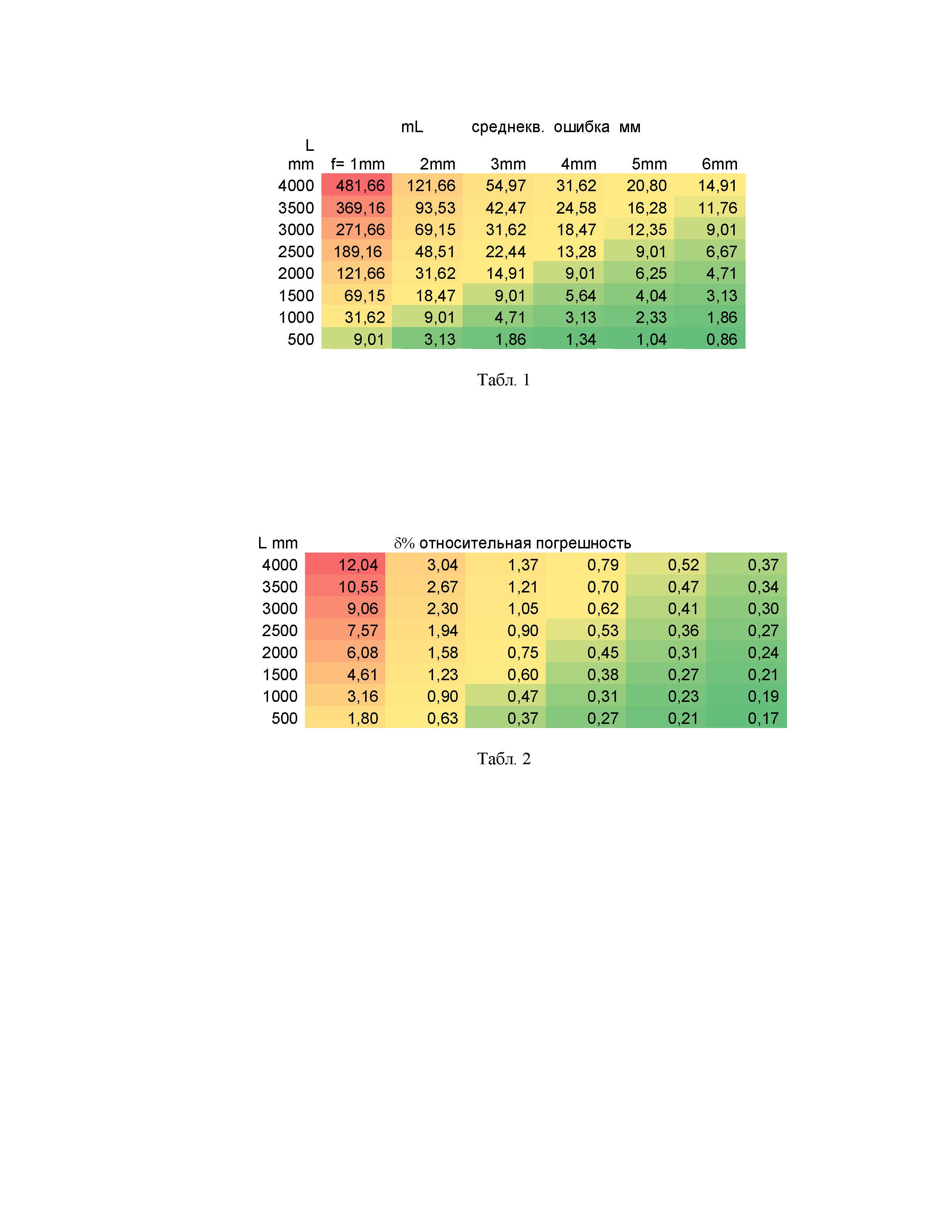
Табл. 1. Таблица значений среднеквадратической ошибки вычисления расстояния LA от плоскости объектива камеры до текущей точки А на поверхности груза для разных расстояний LA и разных фокусных расстояний камеры, для случая смещения вагона на 500 мм, выполненная согласно изобретению.
Табл. 2. Таблица значений относительной погрешности вычисления расстояния LA от плоскости объектив камеры до текущей точки А на поверхности груза для разных расстояний LA и разных фокусных расстояний камеры, для случая смещения вагона на расстояние 500 мм, выполненная согласно изобретению.
Табл. 3. Таблица значений, приведенных в пикселях (размер пикселя матрицы видеокамеры взят 5 микрометров), смещения проекции точки А на поверхности груза на фоточувствительную матрицу объектива для разных расстояний LA и разных фокусных расстояний объектива, выполненная согласно изобретению.
Табл. 4. Таблица значений смаза изображения за время экспозиции при разных экспозициях в зависимости от скорости движения вагона, при наблюдении вагона с расстояния 1 м камерой с разрешением 4 Мп, выполненная согласно изобретению.
Табл. 5. Таблица значений смещения изображения на плоскости матрицы между соседними кадрами для разной частоты кадров в зависимости от скорости движения вагона, при наблюдении вагона с расстояния 1 м камерой с размером матрицы 4 Мп, выполненная согласно изобретению.
Рассмотрим функционирование варианта выполнения заявленной системы определения габаритности груза железнодорожных вагонов (Фиг. 1). Система содержит камеру 1, выход которой соединен с входом вычислительного устройства–коррелятора 2, а вход которой соединен с первым выходом устройства 4 синхронизации и считывания, второй выход которого соединен с входом дальномера 3, выход которого соединен с входом сервера 6, который также соединен с выходом вычислительного устройства – коррелятора 2.
Способ определения габаритности груза железнодорожных вагонов осущестляется следующим образом (Фиг. 1-3).
С помощью устройства 4 синхронизации и считывания формируют сигналы синхронизации частоты съемки кадров камеры 1 с частотой измерений дальномера 3, и передают сигналы синхронизации в камеру 1 и дальномер 3.
С помощью камеры 1 формируют покадровое изображение груза и передают его в вычислительное устройство–коррелятор 2, с помощью которого вычисляют карты смещения точек изображения по соседним кадрам по мере смещения вагона, а также передают кадры изображения и карты смещения в сервер 6.
С помощью дальномера 3 измеряют смещение вагона и передают его в сервер 6.
С помощью камеры 5 считывания бортового номера вагона считывают бортовой номер вагона и передают его в сервер 6.
С помощью сервера 6 определяют профиль поверхности груза, при этом вычисляют по мере перемещения вагона для каждого кадра изображения и соответствующего ему положения вагона расстояние LA от плоскости объектива камеры 1 до текущей точки А на поверхности груза согласно выражению LA = B*f / Р, где
B – расстояние, на которое сместился вагон между соседними кадрами, в данном варианте это расстояние можно назвать стереобазой, по аналогии с терминологией для стереокамер (расстояние между оптическими осями объективов), в которых также используется явление параллакса,
f – расстояние от оптического центра объектива до фоточувствительной матрицы объектива,
Р = |P1- P2| - величина сдвига проекции точки А на поверхности груза на фоточувствительную матрицу камеры, вызванная параллаксом,
P1, P2 – расстояния от точек A1 и A2 проекции на планарную фоточувствительную матрицу объектива точки А на поверхности груза до оптической оси объектива.
Рассмотрим более подробно вариант выполнения заявленных системы и способа определения габаритности груза железнодорожных вагонов, содержащих одну камеру, при смещении вагона на расстояние B.
В заявленном варианте выполнения изобретения (Фиг. 3) параллакс, как сдвиг проекции точки А на матрице одной камеры возникает в последовательных кадрах из-за смещения всего объекта наблюдения - вагона из позиции I где снят первый кадр на известное расстояние В, в позицию II, в которой снимается следующий кадр. Расстояние В, по аналогии со стереовидением, можно назвать стереобазой.
Самой трудоемкой задачей в изобретении является нахождение однозначного соответствия точки A1 - проекции точки А на планарную фоточувствительную матрицу камеры на первом кадре, точке проекции A2 той же точки А на планарную фоточувствительную матрицу на втором кадре. Задача нахождения соответствия точек A1 и A2 является классической и ее успешно решают с помощью различных корреляционных методов, а требуемая вычислительная сложность зависит от размера окрестности точек A1 и A2 в которой требуется искать соответствие.
Если пренебречь нелинейными геометрическими искажениями, вносимыми оптической системой камеры, тогда расстояние LA можно, в первом приближении, рассчитать исходя из соображений геометрических пропорций:
LA = B*f / (|P1-P2|);
где B – расстояние смещения вагона,
f – расстояние от оптического центра объектива до фоточувствительной матрицы объектива (до плоскости изображения),
P1, P2 – расстояния от точек A1 и A2 проекции на планарную фоточувствительную матрицу камеры точки А на поверхности груза до оптической оси объектива до и после смещения вагона на расстояние B,
Р = | P1- P2| - величина сдвига проекции точки А на поверхности груза на фоточувствительную матрицукамеры, вызванная параллаксом.
Тогда:
LA = B*f / Р.
Точность измерения значения LA в конечном счете определяется погрешностями вычисления углов ϕ1и ϕ2 и значением B, или опосредованно – точностью измерения и вычисления значения Р – сдвига изображения вызванного параллаксом и геометрическими и оптическими параметрами камеры.
В нашем идеализированном случае среднеквадратическая погрешность mL вычисленного значения LA можно представить как
__________________
mL = (√(B*mP)2+(P*mB)2)/P2;
где mP и mB соответственно среднеквадратичные ошибки значений для Р и В.
Более точно расчет погрешности восстановления дистанции по данным от камеры приведен в работе [Хамухин Анатолий Владимирович “Высокоэффективные алгоритмы семантической обработки видеоизображений и управления приборными комплексами технического зрения” диссертация на соискание учёной степени доктора технических наук, Москва 2018], однако даже приведенное приближение позволяет вполне наглядно проиллюстрировать возможности заявленного изобретения.
Рассмотрим более подробно вариант выполнения заявленных системы и способа определения габаритности груза железнодорожных вагонов, содержащих стереокамеру, которая состоит из двух объективов, оптические оси которых строго параллельны и смещены на расстояние B друг от друга (Фиг. 2).
Каждую точку А на поверхности измеряемого груза наблюдают двумя объективами I и II стереопары под углами ϕ1 и ϕ2 соответственно, которые образованы расстояниями проекций A1 и A2 точки А на на планарные фоточувствительные матрицы объективов I и II и параллельными оптическими осями каждого объектива I и II. Измеренные углы ϕ1и ϕ2 и базовое расстояние стереопары В позволяют вычислить расстояние LA от плоскости объективов стереокамеры до текущей точки А на поверхности груза как высоту треугольника, образованного центрами левого и правого объективов стереокамеры со стереобазой B и измеряемой точки A.
Если абстрагироваться от нелинейных геометрических искажений, вносимых оптическими системами камер, расстояние LA можно, в первом приближении, рассчитать исходя из соображений геометрических пропорций:
LA = B*f / (|P1-P2|),
где B – стереобаза (расстояние между оптическими осями объективов стереокамеры),
f – расстояние от оптического центра объектива до плоскости изображения (до фоточувствительной матрицы),
P1, P2 – расстояние проекции точки А на плоскости изображения до оптической оси объектива камеры,
Заменим Р = | P1- P2| - собственно величина сдвига проекции точки А на плоскости изображения, вызванная параллаксом стереопары.
Тогда LA = B*f / Р;
Точность измерения значения LA в конечном счете определяется погрешностями вычисления углов ϕ1и ϕ2 и значением B, или опосредованно – точностью измерения и вычисления значения Р – сдвига изображения вызванного параллаксом и геометрическими и оптическими параметрами стереопары.
В нашем идеализированном случае среднеквадратическая погрешность mL вычисленного значения L можно представить как
__________________
mL = (√(B*mP)2+(P*mB)2)/P2,
где mP и mB соответственно среднеквадратичные ошибки значений для Р и В.
В таблицах 1 и 2 представлены значения среднеквадратической ошибки и относительной погрешности в процентах в зависимости от фокусного расстояния объектива камеры f и расстояния до объекта LA для стереобазы В равной 500 мм (в данном варианте равного смещению вагона).
Погрешность вычисления LA в диапазоне от 4м до 1м может быть достигнута менее 1см для условий, когда B равно 1м. Но при такой стереобазе, возрастают требования к камере: для обеспечения приемлемого угла обзора и точности определения углов ϕ1 и ϕ2 требуется камера высокого разрешения порядка 4 - 6 мегапикселей и высокой чувствительности. Также требуется чрезвычайно высокая стабильность положения камеры, или коллинеарность оптических осей объективов в случае примера для стереокамеры. В основном, эти требования в настоящее время вполне реализуемы различными способами, однако реализация такого подхода при большой стереобазе требует гигантских вычислительных ресурсов
Чем больше фокусное расстояние f объектива и чем ближе поверхность груза, тем выше точность, однако при этом сильно растет параллакс и тем сложнее определить ту же точку поверхности груза на разных изображениях. В таблице 3 представлены значения, приведенные в пикселях (размер пикселя взят 5 микрометров), смещения проекции точки А на поверхности груза на фоточувствительную матрицу объектива для разных расстояний LA и разных фокусных расстояний объективов.
Для корреляционных методов поиска совмещения база P равная 400 – 1200 элементам просто не достижима по вычислительной сложности, так как возрастает пропорционально четвертой степени зоны поиска. А для более короткофокусных объективов и меньших размеров стереопары параллакс уменьшается и уменьшается вычислительная сложность системы, но ошибка становится недопустимой.
В качестве варианта решения данной задачи, набирают требуемую стереобазу B на линейном массиве из N стереокамер, каждая из которых отстоит от соседней на расстоянии B/(N-1). В этом случае, чтобы набрать стереобазу B, эквивалентную апертуре в 500 пикселей, при разумном значении для вычислителя, области корреляционного поиска в 16х16 пикселей, разбивают всю стереобазу на 500/16 ≈ 32 интервала. Соответственно, вычислительная сложность при этом вырастет в 31 раз, но не в 30 тысяч раз, как при поиске по всей апертуре.
Конечно, систему из 32 синхронизированных камер высокого разрешения конструировать абсурдно.
В предложенном варианте система имеет камеру с одним объективом, при этом стереобазу В формируют за счет смещения вагона на расстояние B и поочередной съемки вагона одним объективом в разных позициях вагона. В данном случае задачу решают с помощью одной камеры, а стереобазу набирают за счет линейного перемещения самого вагона. Такая камера производит N снимков в процессе перемещения вагона, при этом набирает нужную для вычисления рельефа статистику не за счет параллакса, возникающего наобъективах стереокамеры, разнесенных на расстояние B, а за счет смещения вагона между сьемкой последовательности кадров одной камерой. В этом случае необходимо контролировать положение вагона с точностью, требуемой для формирования стереобазы.
Такая организация системы позволяет существенно снизить, до реально достижимых возможностей, требования к вычислительной сложности коррелятора, и более того организовать процесс вычисления итерационно, при котором вычисления для каждой точки объекта прекращаются при достижении необходимой точности, то есть для точки, расположенной ближе к объективу, необходимая точность может быть достигнута на меньшем количестве снимков, чем для более удаленных точек.
В таблицах 4 и 5 для условий наблюдения вагона с расстояния 1 м камерой с размером матрицы объектива 4 Мп показан смаз изображения в зависимости от экспозиции и скорости перемещения вагона и смещение в пикселях изображения на плоскости матрицы между соседними кадрами для разной частоты кадров в зависимости от скорости движения вагона
Из таблиц 4 и 5 можно сделать вывод, что заявленные система и способ реализуемы при результирующей стереобазе B равной 500 мм, фокусном расстоянии f объектива равном 4 мм, размере матрицы камеры равном 4 мегапикселя, но для экспозиции не более 2 мс (при скорости вагона до 40 км/час) и частоте кадров 60 кадров в секунду. При этом предельная погрешность измерения расстояния в диапазоне от 1 до 4 м от стереокамеры составит 0,8%.
Следует иметь в виду, что синхронно с экспонированием каждого кадра необходимо измерять линейное смещение вагона. Суммарная ошибка на дистанции 500 мм не должна превышать 1-2 мм, иначе эта ошибка станет доминирующей для результирующей ошибки вычислений.
Для увеличения точности измерения необходимо соответственно ужесточать требования к параметрам камер.
Заявленные система и способ определения габаритности груза железнодорожных вагонов основаны на использовании явления параллакса возникающего из-за смещения движущегося вагона при последовательной съемке поверхности груза, находящегося в открытом вагоне одной, неподвижно закрепленной камерой, которая выполняет функции 3-D сканера, для измерения объема загружаемого груза, а также расчета веса загруженного груза с достаточной для коммерческого применения относительной точностью менее 1%. Заявленные система и способ также позволяют контролировать габариты груза с целью исключения превышения допустимых габаритов. Преимуществом заявленного изобретения является отсутствие движущихся сканирующих деталей, относительная дешевизна, компактность и мобильность системы. Данные получаемые с камеры также могут быть использованы для контроля состояния внутреннего объема пустых вагонов и определения наличия посторонних предметов внутри вагонов.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации заявленного изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла заявленного изобретения, раскрытого в прилагаемой формуле изобретения.
Источник опорного напряжения с калибровкой выходного напряжения
Способ автоматической настройки системы разнесенных в пространстве телекамер для формирования панорамного изображения
Система и способ генерации изображений, содержащих текст
Система противодействия беспилотным летательным аппаратам
Устройство парковки и зарядки беспилотных летательных аппаратов (бпла)
Радиационно-стойкое статическое оперативное запоминающее устройство (озу) на комплементарных металл-окисел-полупроводник транзисторах
Устройство коммуникационного интерфейса для сети spacewire
Устройство видеонаблюдения
Система и способ трехмерной визуализации яркостной радиолокационной карты местности
Система и способ идентификации транспортных средств, противоправно вторгшихся на выделенную полосу
Рлс с программируемой временной диаграммой и способ ее функционирования
Система и способ определения нарушений правил дорожного движения при проезде перекрестка
Ядро сопроцессора быстрого преобразования фурье реального времени
Радиационно-стойкая библиотека элементов на комплементарных металл-окисел-полупроводник транзисторах
Способ и устройство ввода, обработки и вывода видеоизображения
Система регулирования уличного освещения и определения правонарушений и внештатных происшествий

