Результат интеллектуальной деятельности: Система управления и наведения вооружения боевой машины
Вид РИД
Изобретение
Изобретение относится к области вооружения и военной техники, в частности к системам управления огнем (СУО) боевых машин (БМ) типа танков, БМП, БТР, БМД и т.п.
В качестве наиболее близкого решения может быть рассмотрена система управления и наведения вооружения боевой машины, описанная в патенте на изобретение РФ №2553712 и выбранная в качестве прототипа.
Представленная система содержит пульты управления по горизонтальному и вертикальному наведению (ГН и ВН), аппаратуру системы управления вооружением, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок управления системы наведения вооружения (БУ СНВ), к которому подсоединены два контура, горизонтального и вертикального наведения, а именно: последовательно соединенные усилитель мощности, двигатель и редуктор, датчик положения соответственно горизонтального (башни) и вертикального (пушки) каналов наведения, выходы которых, а также датчиков абсолютных угловых скоростей горизонтального и вертикального наведения подсоединены к БУ СНВ.
Общими признаками прототипа и заявляемого технического решения являются задающее устройство независимо стабилизированного в пространстве инерциального объекта стабилизации, аппаратура системы управления боевым отделением, пульты управления по ГН и ВН, блок управления стабилизатора (в заявляемом техническом решении - блок управления системой наведения вооружения), усилители мощности, редукторы и электродвигатели оружия, датчик положения башни, датчик положения по ВН оружия, датчик крена и тангажа (входит в состав аппаратуры системы управления вооружением), датчики абсолютной угловой скорости пушки по ГН и ВН.
Недостатками прототипа является невозможность установки дополнительного стабилизированного вооружения, и как следствие невозможность рационально выбирать свой тип вооружения и боеприпаса, приспособленный для конкретной цели, отсутствие информационных каналов обмена с другими устройствами, что затрудняет диагностику и возможность установки на другие боевые машины.
Задача, на решение которой направлено заявляемое техническое решение, заключается в повышении точности и эффективности стрельбы по расширенной номенклатуре целей, в широком диапазоне условий боевого применения; расширении функциональных возможностей БМ, повышении эксплуатационных характеристик системы управления и наведения вооружения (СУНВ).
Поставленная задача решается системой управления и наведения вооружения боевой машины, содержащей пульты управления по ГН и ВН, аппаратуру системы управления вооружением, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок управления системы наведения вооружения (БУ СНВ), к которому подсоединены два контура, горизонтального и вертикального наведения, а именно: последовательно соединенные усилитель мощности, двигатель и редуктор, датчик положения соответственно горизонтального (башни) и вертикального (пушки) каналов наведения, выходы которых, а также датчиков абсолютных угловых скоростей горизонтального и вертикального наведения подсоединены к БУ СНВ, при этом новым является то, что система наведения вооружения (СНВ) выполнена с возможностью подсоединения к первому входу-выходу, являющемуся первым входом-выходом БУ СУНВ, посредством информационного канала CAN-1 - к задающему устройству стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, по второму входу-выходу, являющемуся вторым входом-выходом БУ СНВ, посредством канала CAN-2 - к устройству выработки баллистических поправок стрельбы, входящему в состав аппаратуры системы управления вооружением, и включает дополнительные контура вертикального наведения в виде последовательно соединенных соответственно двигателя и редуктора, датчика положения пусковой установки (ПУ) УР малого калибра и ПУ УР большего калибра, левой и правой, причем датчики положения механически связаны с соответствующими ПУ, при этом входы этих контуров подсоединены соответственно ко второму-четвертому выходам усилителя мощности ВН, третий вход БУ СНВ посредством внутреннего цифрового информационного канала обмена типа CAN дополнительно соединен электрически с датчиками положения ПУ малого калибра, датчиками положения ПУ большего калибра, а также датчиками положения пушки и датчиками абсолютных угловых скоростей горизонтального и вертикального наведения, при этом коммутация различных видов оружия осуществляется в БУ СНВ по командам с аппаратуры системы управления вооружением.
Технический результат, обеспечиваемый при реализации заявляемого технического решения, достигается за счет того, что:
- дополнительное стабилизированное вооружение, в виде правой и левой пусковых установок УР большего калибра и УР малого калибра, работающие в режиме независимой стабилизации, позволяет осуществлять управление оператором и автоматически, выбирать соответствующее вооружение;
- используются цифровые датчики углового положения и угловых скоростей с более низкими значениями абсолютной погрешности выходного сигнала;
- осуществляется передача сигналов непосредственно в цифровом коде, без дополнительных промежуточных преобразований величин, за счет чего устраняются обусловленные ими дополнительные погрешности;
- повышаются эксплуатационные характеристики СУНВ и возможности его диагностики и адаптации к другим комплексам управления вооружением за счет наличия информационных каналов обмена между аппаратурой системы управления боевого отделения и СУНВ.
Именно организованная таким образом система управления и наведения вооружения обеспечивает повышение эффективности стрельбы по расширенной номенклатуре целей, в широком диапазоне условий боевого применения. Тем самым достигается цель изобретения.
Сопоставительный анализ с прототипом показывает, что заявляемая система управления и наведения вооружения БМ отличается наличием новых элементов, а именно:
- двигателя и редуктора вертикального наведения ПУ УР малого калибра;
- двигателя и редуктора вертикального наведения ПУ УР большего калибра, левой и правой;
- датчика положения ПУ малого калибра;
- датчика положения ПУ большего калибра, левой и правой;
- информационные каналы типа CAN.
Сравнение заявленного решения с другими техническими решениями показывает, что отдельные вновь вводимые элементы достаточно известны в технике, но введение их в указанной связи в СУО позволяет решить поставленные задачи.
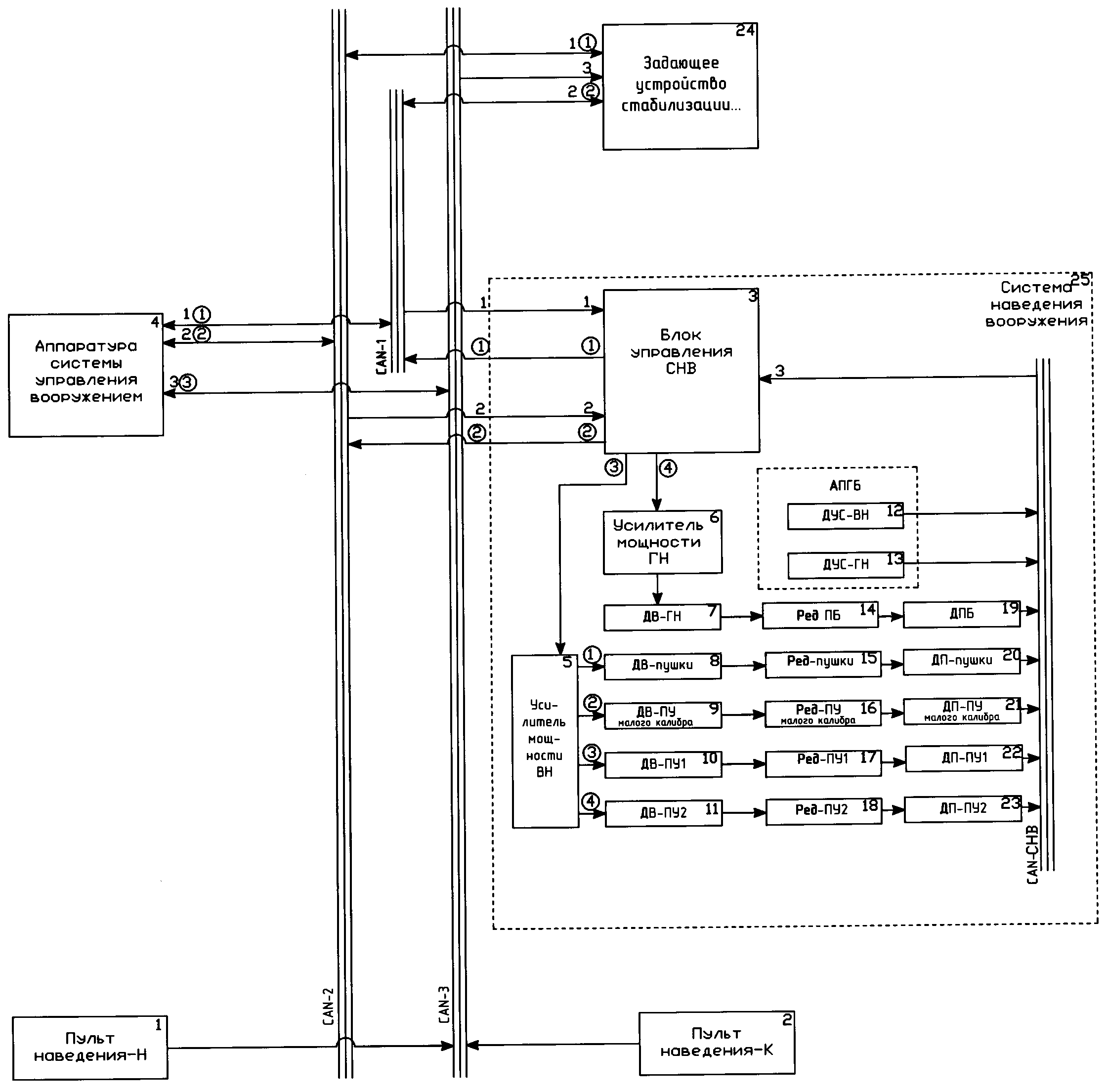
Сущность изобретения, его техническая реализуемость и промышленная применимость поясняются чертежом, представленным на фиг. 1, на котором показана функциональная схема системы управления и наведения вооружения боевой машины.
Система управления и наведения вооружения (СНВ) содержит блок управления СНВ (БУ СУНВ) 3, усилители мощности вертикального 5 и горизонтального наведения 6, двигатель горизонтального наведения (башни) 7, двигатели вертикального наведения пушки 8, ПУ УР малого калибра 9 и двух ПУ УР большего калибра 10, 11, датчики положения башни 19, пушки 20, ПУ малого калибра 21, двух ПУ большего калибра 22, 23, датчики угловых скоростей (ДУС) вертикального 12 и горизонтального наведения пушки 13, а также пульты наведения наводчика 1 и командира 2, аппаратуру системы управления вооружением 4, задающее устройство независимо стабилизированного в пространстве инерциального объекта стабилизации по ГН и ВН 24, причем первый вход-выход БУ СУНВ 3 соединен посредством цифрового канала информационного обмена CAN-1 с задающим устройством независимо стабилизированного в пространстве инерциального объекта стабилизации по ГН и ВН 24 и является первым внешним входом-выходом СУНВ, второй вход-выход БУ СНВ 3 соединен посредством канала CAN-2 с устройством выработки баллистических поправок, структурно входящим в аппаратуру системы управления вооружением 4, и также является внешним, вторым входом-выходом СНВ, а третий вход, являющийся внутренним для СНВ, посредством внутреннего цифрового канала CAN-CHB соединен с ДУС вертикального 12 и горизонтального наведения пушки 13, с датчиками положения башни 19 (по горизонтальному каналу), а по вертикальному каналу - с датчиком положения пушки 20, датчиком положения ПУ малого калибра 21, датчиками положения левой и правой ПУ большего калибра 22, 23, которые (датчики) взаимосвязаны, в свою очередь, с выходами соответствующих редукторов 14-18, входы которых соединены с выходами двигателей соответственно 7-11, входы которых соединены соответственно с первым-четвертым выходами усилителя мощности вертикального наведения 5, внутренние третий и четвертый выходы БУ СНВ 3 соединены со входами усилителей мощности соответственно вертикального 5 и горизонтального наведения 6, а пульты управления наводчика 1 и командира 2 связаны посредством информационного канала CAN-3 с задающим устройством независимо стабилизированного в пространстве инерциального объекта стабилизации по ГН и ВН 24.
БУ СУНВ 3 обеспечивает стабилизацию и стабилизированное наведение вооружения при стрельбе с места, с ходу и на плаву всеми видами имеющегося в БМ оружия:
- пушки,
- УР малого калибра,
- УР большего калибра.
Канал CAN-CHB служит для обмена информацией в режиме реального времени между БУ СНВ и датчиками угловых положений различных типов оружия и башни, а также датчиками угловых скоростей пушки по вертикали и горизонту.
Функционирование комплекса вооружения обеспечивается совместной работой СНВ, задающего устройства независимо стабилизированного в пространстве инерциального объекта стабилизации и аппаратуры системы управления вооружением.
Принцип функционирования СУНВ заключается в традиционно используемом в системах управления подобного типа БМ принципе «марка на цели», при котором наведение оружия на цель заключается в сопровождении цели линией визирования (центром прицельной марки на экране видеомонитора) в ручном или в автоматическом режиме, и постоянном отслеживании линии визирования стволами оружия с учетом рассчитанных угловых поправок.
Линия визирования прицела имеет независимую двухплоскостную гироскопическую стабилизацию, а ее наведение по каналам вертикального и горизонтального наведения выполняется в ручном от пульта наведения наводчика 1 или пульта наведения наводчика 2, либо в режиме автосопровождения по командам, пропорциональным требуемой скорости наведения. Режимы работы комплекса вооружения в целом и отдельных составных ее частей задаются совокупностью команд управления, поступающих в случае ручного сопровождения с пульта наведения наводчика 1 или пульта наведения командира 2.
В режиме «Основной» вооружение, с которого осуществляется стрельба, отслеживает с помощью электромеханических приводов положение стабилизированной линии визирования прицела наводчика (ПН), наведение которой производит наводчик при помощи пульта наведения наводчика (ПН-Н), при этом аппаратурой системы управления вооружением выдаются команды на измерение дальности, стрельбу, переключение типов боеприпасов, а также управление функциями ПН. Наводчик может использовать автомат сопровождения цели.
Командир в режиме «Основной» при помощи ПН-К производит поиск целей в ручном, полуавтоматическом и автоматическом режимах, производит замеры дальности до цели, при этом в СУНВ выдаются команды на измерение дальности через прицел командира (ПК), производит наведение стабилизированной линии визирования ПК, выдает целеуказание наводчику с возможностью передачи захваченной автоматом сопровождения целью, управляет функциями ПН (изменение полей зрения, выполнение настройки и корректировки телевизионного и тепловизионного изображений (яркость, контрастность, фокусировка), работает с оптическим локационным обнаружителем).
В режиме «Основной» блок выработки баллистических поправок БВБП, входящий в состав аппаратуры системы управления вооружением, рассчитывает и отрабатывает поправки вертикального и горизонтального упреждения с учетом следующих параметров: типа боеприпаса, текущей дальности до цели, температуры воздуха, температуры заряда, атмосферного давления, боковой и продольной составляющей ветра, угловой скорости линии визирования, угла крена машины, угла места цели.
Соответствующая информация поступает с датчиков внешних условий, датчика крена и тангажа, внутренних датчиков положения, поступающих по цифровым каналам связи CAN. Угловая скорость цели определяется с использованием значений команд наведения, поступающих по цифровому каналу на вход ПН.
Управление режимами работы СУНВ (смена режимов работы) осуществляется с аппаратуры системы управления вооружением путем активации соответствующих кнопок. При этом в канал информационно-логического взаимодействия CAN-2 выдаются команды управления, по которым обеспечивается переключение режимов работы без задержек и прерываний работы.
Любая ветвь (привод) СНВ, например привод башни, функционирует следующим образом:
выходной сигнал усилителя мощности ГН 6 вращает вал электродвигателя ГН 7, который в свою очередь через редуктор ГН 14 поворачивает башню с установленным вооружением в направлении, определяемом задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта 24, с учетом угловой поправки по ГН, рассчитанной устройством вычисления баллистических поправок, входящим в состав аппаратуры системы управления вооружением 4.
Аналогично выбранный в блоке управления СУНВ 3 электродвигатель ВН (8-11) через соответствующий редуктор ВН (15-18) поворачивает пушку или выбранную пусковую установку в направлении, определяемом задающим устройством стабилизации с датчиком положения независимо стабилизированного в пространстве инерциального объекта 24 по ВН с учетом угловой поправки по ВН, рассчитанной соответственно устройством вычисления баллистических поправок для выбранного типа вооружения
Таким образом, заявляемая в качестве изобретения система управления и наведения вооружением БМ позволяет:
- повысить огневую мощь, обеспечив эффективное поражение в широком диапазоне условий боевого применения всей номенклатуры целей, предназначенных для БМ рассматриваемого типа, путем использования помимо пушки, двух типов управляемого вооружения, появляется возможность выбора для каждого типа цели специализированного оружия, при этом пусковые установки УР работают в режиме независимой стабилизации, аналогично основному вооружению;
- повысить точность стрельбы и быстродействие комплекса вооружения за счет использования цифровых датчиков углового положения и угловых скоростей с более низкими значениями абсолютной погрешности выходного сигнала, непосредственной передачи сигналов в цифровом коде, без дополнительных промежуточных преобразований величин, что позволяет устранить дополнительные погрешности;
- повысить эксплуатационные характеристики системы управления и возможности его диагностики и адаптации к другим комплексам управления вооружением за счет наличия информационных каналов обмена между аппаратурой системы управления боевого отделения, задающим устройством независимо стабилизированного в пространстве инерциального объекта стабилизации по горизонтальному и вертикальному наведению и СУНВ,
- обеспечить повышение надежности, а также унификацию как в смысле использования на различных образцах бронетанковой техники: танков, БМП, БТР, БМД, так и для применения на объектах стационарного и морского базирования.
Система управления и наведения вооружения (СУНВ) боевой машины, содержащая пульты управления по горизонтальному и вертикальному наведению (ГН и ВН), аппаратуру системы управления вооружением, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок управления системы наведения вооружения (БУ СНВ), к которому подсоединены два контура горизонтального и вертикального наведения, а именно: последовательно соединенные усилитель мощности, двигатель и редуктор, датчик положения соответственно горизонтального (башни) и вертикального (пушки) каналов наведения, выходы которых, а также датчиков абсолютных угловых скоростей горизонтального и вертикального наведения подсоединены к БУ СНВ, отличающаяся тем, что система наведения вооружения (СНВ) выполнена с возможностью подсоединения к первому входу-выходу, являющемуся первым входом-выходом БУ СУНВ, посредством информационного канала CAN-1 - к задающему устройству стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, а по второму входу-выходу, являющемуся вторым входом-выходом БУ СНВ, посредством канала CAN-2 - к устройству выработки баллистических поправок стрельбы, входящему в состав аппаратуры системы управления вооружением, и включает дополнительные контуры вертикального наведения в виде последовательно соединенных соответственно двигателя и редуктора, датчика положения пусковой установки (ПУ) УР малого калибра и ПУ УР большего калибра, левой и правой, причем датчики положения механически связаны с соответствующими ПУ, при этом входы этих контуров подсоединены соответственно ко второму-четвертому выходам усилителя мощности ВН, третий вход БУ СНВ посредством внутреннего цифрового информационного канала обмена типа CAN дополнительно соединен электрически с датчиками положения ПУ малого калибра, датчиками положения ПУ большего калибра, а также датчиками положения пушки и датчиками абсолютных угловых скоростей горизонтального и вертикального наведения, при этом коммутация различных видов оружия осуществляется в БУ СНВ по командам с аппаратуры системы управления вооружением.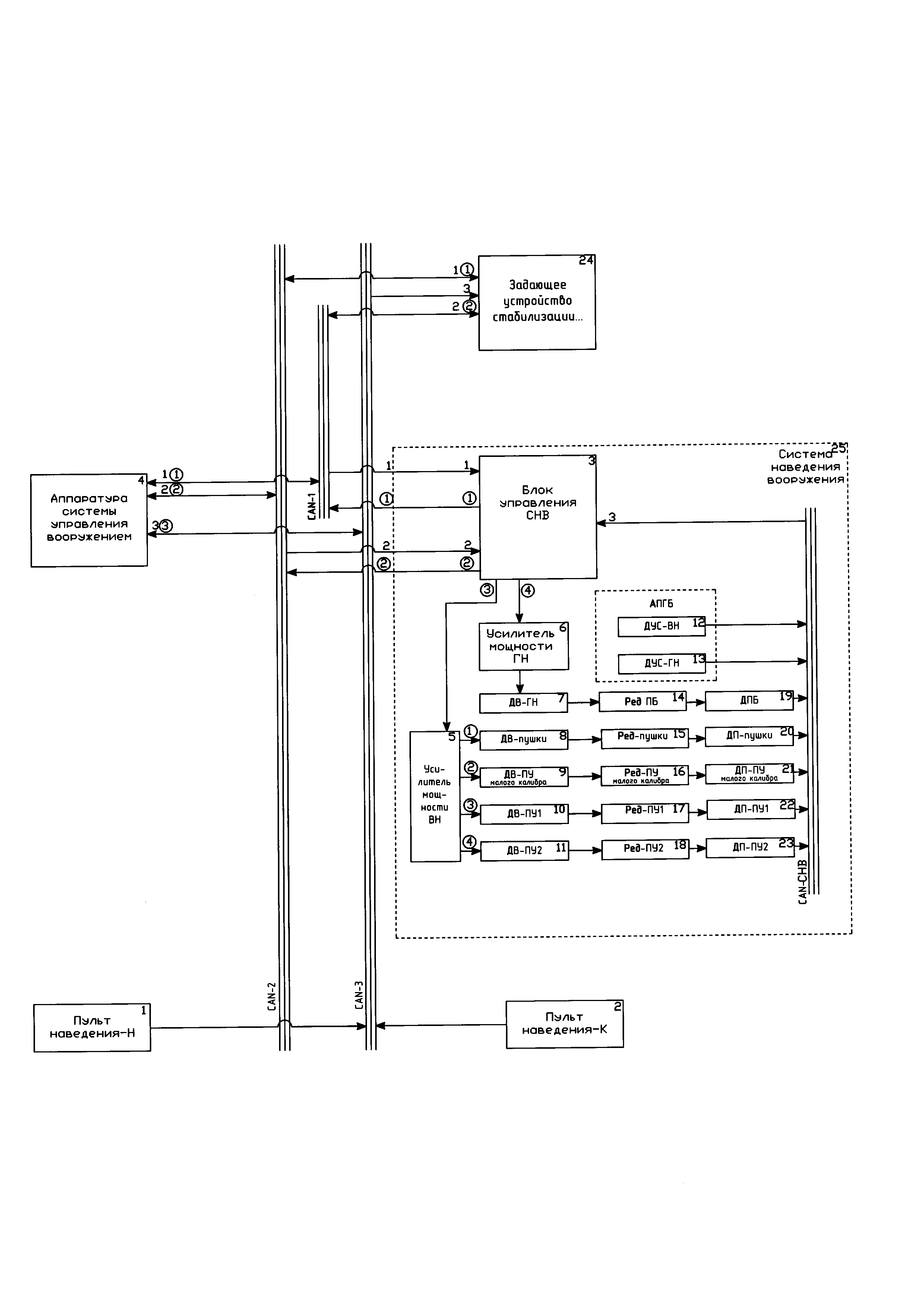
Способ получения авиационного бензина б95/130
Устройство обеспечения теплового режима и чистоты космической головной части ракеты космического назначения с крупногабаритной полезной нагрузкой
Способ наблюдения за местностью механиком-водителем военной гусеничной машины
Стенд для отработки всеглубинного пускового устройства арбалетного типа для необитаемых подводных аппаратов
Способ обеспечения эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры
Комплекс имитации сложных военных объектов
Устройство компенсации активных помех с коммутацией компенсационного канала
Способ определения координат и скорости источника радиоизлучения
Система управления пиросредствами
Полевой индикатор естественного электромагнитного поля земли
Способ сопровождения объектов

