Результат интеллектуальной деятельности: Способ построения радиолокационной станции
Вид РИД
Изобретение
Изобретение относится к радиолокационной технике, а именно к способам построения радиолокационных станций (РЛС) и может быть использовано в РЛС различного назначения, например, управления воздушным движением, метеорологических и т.д.
Известен способ построения РЛС [1 - стр. 661, рис. 13.44, Справочник по радиолокации. / Под ред. М.И. Сколника. М.: Техносфера. 2014 г. книга 1. - 672 с.], при котором устанавливают антенну в виде плоской фазированной антенной решетки (ФАР), состоящую из М приемопередатчиков и М горизонтальных антенных линеек, расположенных одна над другой, на вращающееся опорно-поворотное устройство, устанавливают в каждую антенную линейку по N антенных элементов, объединяют их через делитель мощности, ко входу которого подключают антенный вход-выход одного из приемопередатчиков. Выход формирователя зондирующего сигнала соединяют с делителем мощности, выходы которого соединяют со входами приемопередатчиков, в передающей части каждого приемопередатчика устанавливают фазовращатель и твердотельный усилитель мощности зондирующего сигнала.
К недостаткам известного способа следует отнести:
- использование в антенной решетке (АР) пассивных линеек излучателей, излучатели которых объединяются с помощью сумматора-делителя мощности, что в режиме передачи вызывает потери выходной излучаемой мощности, а в режиме приема ухудшает чувствительность приемной части ФАР, что ведет к уменьшению дальности действия РЛС. Оценка параметров РЛС с использованием известного решения с пассивными линейками показывает, что при использовании фазовращателей с величиной потерь от 0,5 до 1 дБ, делителей с потерями 0,5 дБ, фидеров с потерями 0,2 дБ и разъемов, обеспечивающих соединение фидеров, с потерями 0,2 дБ, общие потери сигнала составят от 1,4 до 1,9 дБ. Это соответствует снижению мощности выходного сигнала в режиме передачи в интервале от 1,38 до 1,55 раз, ту же величину составит ухудшение чувствительности в режиме приема. Оценка снижение дальности действия РЛС с помощью уравнения дальности при радиолокации [2 - стр. 8, Мищенко Ю.А. Зоны обнаружения. М: Воениздат. 1963. - 96 с.] показывает, что уменьшение дальности действия РЛС при одновременном уменьшении выходной мощности и ухудшения минимальной принимаемой мощности Pr0 в интервале от 1,38 до 1,55 раз (от 17,5% до 24,5%).
Наиболее близким по технической сущности к предлагаемому способу является способ построения РЛС [3 - стр. 25-27, рис. 2.3, Кузьмин С.З. Цифровая радиолокация. Введение в теорию. Киев. 2000 г. - 420 с.], принятый за прототип, заключающийся в том, что излучают зондирующий сигнал и принимают отраженные сигналы антенной системой в виде неподвижной плоской фазированной антенной решетки, при этом формируют антенную решетку из подрешеток, в каждой из которых антенные элементы соединяют через фазовращатель с сумматором подрешетки, который в режиме передачи используют как делитель мощности, формируют в режиме передачи зондирующий сигнал, усиливают его по мощности, распределяют его на подрешетки, при этом устанавливают направление передающего луча путем изменения фазы зондирующего сигнала с помощью фазовращателей подрешеток. В режиме приема суммируют принимаемые сигналы в подрешетках с помощью сумматоров подрешеток, усиливают их, преобразуют по частоте, преобразуют в цифровую форму и формируют приемную диаграмму направленности (ДН) путем весового суммирования отсчетов сигналов с выхода подрешеток. При выполнении радиолокационного обзора производят сканирование максимумами передающей и приемной ДН фазированной антенной решетки в заданной зоне обзора и выполняют обнаружение отраженных сигналов в отсчетах приемной диаграммы направленности, формируют радиолокационные данные обнаруженных объектов, выполняют оценку численных значений координат объектов и параметров траектории объектов.
К недостаткам прототипа следует отнести:
- использование в антенной решетке пассивных подрешеток, антенные элементы которых объединяются с помощью сумматора-делителя мощности, что в режиме передачи вызывает потери выходной излучаемой мощности, а в режиме приема ухудшает чувствительность приемной части АР, что ведет к уменьшению дальности действия РЛС. Оценка параметров РЛС с использованием известного решения с пассивными линейками показывает, что при использовании фазовращателей с величиной потерь от 0,5 до 1 дБ, делителей с потерями 0,5 дБ, фидеров с потерями 0,2 дБ и разъемов, обеспечивающих соединение фидеров, с потерями 0,2 дБ, общие потери передаваемого сигнала в режиме передачи и принимаемого сигнала в режиме приема составят от 1,4 до 1,9 дБ (в интервале от 1,38 до 1,55 раз). При этом уменьшение дальности действия РЛС составит от 17,5% до 24,5%;
- использование передающего луча только игольчатой формы, что значительно увеличивает время обзора в случае, если заданный угол обзора в угломестной плоскости ϕАЗ превышает ширину передающей ДН в угломестной плоскости ΔϕАЗ. При этом время обзора увеличивается в ϕАЗ/ΔϕАЗ раз, поскольку необходимо выполнять обзор несколько раз с разным угловым направлением максимума ДН в угломестной плоскости.
Технической проблемой, на решение которой направлен предлагаемый способ, является увеличение дальности действия радиолокационной станции.
Для решения указанной технической проблемы предлагается способ построения радиолокационной станции, при котором излучают зондирующий сигнал и принимают отраженные сигналы антенной системой в виде плоской фазированной антенной решетки, формируют в режиме передачи зондирующий сигнал, усиливают его по мощности, при этом устанавливают направление максимума передающей диаграммы направленности путем изменения фазы зондирующего сигнала с помощью фазовращателей, а в режиме приема усиливают принимаемые сигналы, преобразуют по частоте, преобразуют в цифровую форму и формируют приемную ДН путем весового суммирования полученных отсчетов, при выполнении радиолокационного обзора производят сканирование максимумами передающей и приемной диаграмм направленности фазированной антенной решетки в заданной зоне обзора и выполняют обнаружение отраженных от объектов сигналов по отсчетам принимаемого сигнала, формируют радиолокационные данные обнаруженных объектов, выполняют оценку численных значений координат объектов и параметров траектории объектов.
Согласно изобретению, устанавливают антенную систему на опорно-поворотное устройство, устанавливают антенные элементы фазированной антенной решетки на передние панели многоканальных приемопередающих модулей с шагом между ними по вертикали и горизонтали, определяемым требуемым сектором электронного сканирования, соответственно, в вертикальной и горизонтальной плоскостях, соединяют каждый антенный элемент с антенным входом-выходом одного из каналов многоканального приемопередающего модуля, формируют антенное полотно фазированной антенной решетки из многоканальных приемопередающих модулей, устанавливая их рядом друг с другом таким образом, чтобы поверхности их передних панелей были расположены в одной плоскости, а расстояние между антенными элементами сохранялось неизменным в вертикальной и горизонтальной плоскостях, при этом в режиме передачи в передающей части каждого приемопередающего канала изменяют фазу зондирующего сигнала с помощью фазовращателя и усиливают в твердотельном усилителе мощности таким образом, чтобы в пространстве формировалась передающая диаграмма направленности игольчатой или веерообразной формы, ширина которой определяется требуемым угловым размером зоны обнаружения радиолокационной станции, в режиме приема в каждом приемопередающем канале усиливают принимаемые сигналы и преобразуют их по частоте, сигналы с выходов приемопередающих каналов преобразуют в цифровую форму, при этом используют полученные отсчеты для формирования многолучевой приемной диаграммы направленности, каждый луч которой имеет игольчатую форму, а соседние лучи перекрываются по уровню половинной мощности, причем ширина приемной диаграммы направленности соответствует ширине передающей диаграммы направленности, при обнаружении объектов, измерении их дальности и угловых координат, используют моноимпульсный метод обработки сигналов каждой из соседних пар приемных лучей, при этом для сканирования в ограниченном секторе по азимуту используют электронную перестройку приемной и передающей диаграмм направленности при неподвижной антенной системе, а для кругового обзора по азимуту используют вращение антенной системы с помощью опорно-поворотного устройства.
Техническим результатом предлагаемого изобретения является сокращаение времени обзора пространства.
Проведенный сравнительный анализ предлагаемого способа и прототипа показывает, что их отличие заключается в следующем:
- в прототипе фазированная антенная решетка разделена на пассивные подрешетки, внутри подрешеток каждый антенный элемент соединяют через фазовращатель с сумматором подрешетки, который в режиме передачи используют как делитель мощности. В то время как в предлагаемом способе антенный элемент соединен со входом-выходом одного из приемопередающих каналов многоканального приемопередающего модуля. Такое построение сокращает потери выходной мощности зондирующего сигнала и снижает коэффициент шума приемной части, по сравнению с прототипом, что ведет к увеличению дальности действия РЛС;
- в прототипе используется один усилитель мощности зондирующего сигнала, сигнал с выхода которого делят по числу подрешеток, распределяют на подрешетки, в которых, в свою очередь, сигнал делится по числу антенных элементов. В то же время в предлагаемом способе в каждом приемопередающем канале установлен твердотельный усилитель мощности;
- в прототипе используется передающий луч только игольчатой формы, что значительно увеличивает время обзора, в случае если заданный угол обзора в угломестной плоскости ϕАЗ превышает ширину передающей ДН в угломестной плоскости ΔϕАЗ. В то же время в предлагаемом способе в зависимости от углового размера зоны обнаружения радиолокационной станции, кроме игольчатой формы может использоваться более широкая веерообразная форма ДН, что обеспечивает снижение времени обзора за счет перекрытия, например, всего заданного угломестного угла обзора за один оборот ФАР. При использовании веерообразной формы передающей ДН число лучей многолучевой приемной ДН выбирается таким, чтобы ширина приемной ДН соответствовала угломестной ширине передающей ДН;
- в прототипе используется неподвижная ФАР, при этом сектор обзора РЛС по азимуту и углу места ограничен сектором обзора ФАР. Типичным значением сектора обзора является ±45°…±60°, т.е для кругового обзора пространства требуется три или четыре неподвижных ФАР, что значительно увеличивает стоимость РЛС. В то время как в предлагаемом способе используется опорно-поворотное устройство, что обеспечивает работу РЛС или в режиме секторного сканирования с помощью электронного перемещения ДН при неподвижной ФАР, или в режиме кругового сканировании пространства по азимуту за счет механического вращения ФАР, что значительно снижает стоимость РЛС.
Сочетание отличительных признаков и свойства предлагаемого способа построения РЛС из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
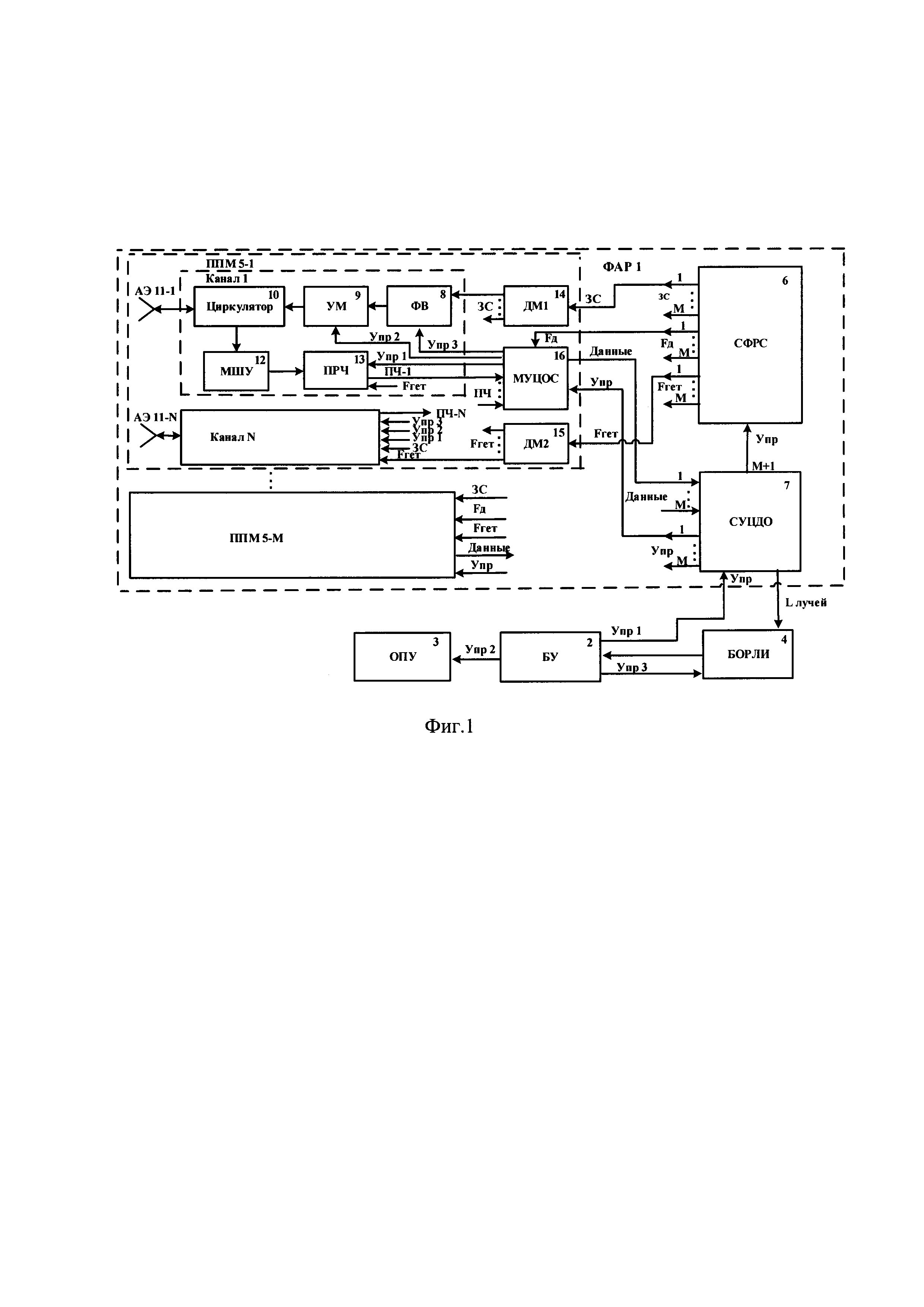
На фиг. 1. приведена структурная схема устройства, обеспечивающего реализацию предложенного способа.
На фиг. 2. приведена структурная схема системы управления и цифрового диаграммообразования.
На фиг. 3. приведена структурная схема преобразователя частоты.
На фиг. 4. приведена структурная схема модуля управления и цифровой обработки сигналов.
При реализации предложенного способа выполняют следующую последовательность действий:
- излучают зондирующий сигнал и принимают отраженные сигналы антенной системой в виде плоской фазированной антенной решетки -1,
- устанавливают антенные элементы фазированной антенной решетки на передние панели многоканальных приемопередающих модулей с шагом между ними по вертикали и горизонтали, определяемым требуемым сектором электронного сканирования, соответственно, в вертикальной и горизонтальной плоскостях, соединяют каждый антенный элемент с антенным входом-выходом одного из каналов многоканального приемопередающего модуля - 2;
- формируют антенное полотно фазированной антенной решетки из многоканальных приемопередающих модулей, устанавливая их рядом друг с другом таким образом, чтобы поверхности их передних панелей были расположены в одной плоскости, а расстояние между антенными элементами сохранялось неизменным в вертикальной и горизонтальной плоскостях -3;
- устанавливают антенную систему на опорно-поворотное устройство - 4;
- в режиме передачи формируют зондирующий сигнал, усиливают его по мощности в передающей части каждого приемопередающего канала, устанавливают направление максимума передающей диаграммы направленности путем изменения фазы зондирующего сигнала с помощью фазовращателей, при этом в передающей части каждого приемопередающего канала изменяют фазу зондирующего сигнала с помощью фазовращателя и усиливают в твердотельном усилителе мощности таким образом, чтобы в пространстве формировалась передающая диаграмма направленности игольчатой или веерообразной формы, ширина которого определяется требуемым угловым размером зоны обнаружения радиолокационной станции - 5;
- в режиме приема усиливают принимаемые сигналы и преобразуют их по частоте в каждом приемопередающем канале, преобразуют в цифровую форму сигналы с выходов приемопередающих каналов, при этом используют полученные отсчеты для формирования многолучевой приемной диаграммы направленности, формируют приемную диаграмму направленности путем весового суммирования полученных отсчетов, каждый луч которой имеет игольчатую форму, а соседние лучи перекрываются по уровню половинной мощности, причем ширина приемной диаграммы направленности соответствует ширине передающей диаграммы направленности - 6;
- при выполнении радиолокационного обзора производят сканирование максимумами передающей и приемной диаграмм направленности фазированной антенной решетки в заданной зоне обзора, выполняют обнаружение от объектов сигналов по отсчетам принимаемого сигнала, формируют радиолокационные данные обнаруженных объектов, выполняют оценку численных значений координат объектов и параметров траектории объектов, при этом измерение их дальности и угловых координат выполняют с использованием моноимпульсного метода обработки сигналов каждой из соседних пар приемных лучей - 7;
- для сканирования в ограниченном секторе по азимуту используют электронную перестройку приемной и передающей диаграмм направленности при неподвижной антенной системе, а для кругового обзора по азимуту используют вращение антенной системы с помощью опорно-поворотного устройства - 8.
Предложенный способ предназначен для построения РЛС с антенной системой в виде активной фазированной антенной решетки (ФАР), обеспечивающей работу в режиме секторного сканирования с помощью электронного перемещения ДН при неподвижной ФАР, или в режиме кругового сканировании пространства по азимуту за счет механического вращения ФАР на опорно-поворотном устройстве.
Реализация предложенного способа построения РЛС возможна, например, с помощью устройства, включающего в себя (фиг. 1) ФАР 1, блок управления (БУ) 2, первый управляющий выход которого подключен к управляющему входу ФАР 1, второй управляющий выход - ко входу управления опорно-поворотного устройства (ОПУ) 3, третий управляющий выход - к управляющему входу блока обработки радиолокационной информации (БОРЛИ) 4, а вход - к выходу БОР ЛИ 4.
ФАР 1 включает в себя М приемопередающих модулей (ППМ) 5, систему формирования и распределения сигналов (СФРС) 6 и систему управления и цифрового диаграммообразования (СУЦДО) 7.
СФРС 6 имеет М выходов зондирующего сигнала (ЗС), соединенных со входами ЗС ППМ 5, М выходов дискретизации (Fд), соединенных со входами дискретизации ППМ 5, М выходов гетеродина (Fгeт), соединенных с гетеродинными входами ППМ 5.
ППМ 5 содержат N приемопередающих каналов, каждый из которых содержит последовательно соединенные фазовращатель (ФВ) 8, вход которого является зондирующим входом канала, твердотельный усилитель мощности (УМ) 9, циркулятор 10, вход-выход которого соединен с антенным элементом (АЭ) 11, к выходу циркулятора 10 подключены последовательно соединенные малошумящий усилитель (МШУ) 12, преобразователь частоты (ПРЧ) 13, гетеродинный вход которого является гетеродинным входом канала, а выход промежуточной частоты (ПЧ) является выходом ПЧ канала. Управляющие входы ПРЧ 13, УМ 9 и ФВ 8 являются соответственно первым, вторым и третьим управляющим входом канала.
ППМ 5 также содержит первый делитель мощности ДМ1 14, выходы которого соединены с зондирующими входами каналов, а вход является зондирующим входом ППМ 5, второй делитель мощности ДМ2 15, выходы которого соединены с гетеродинными входами каналов, а вход является гетеродинным входом ППМ 5, модуль управления и цифровой обработки сигналов (МУЦОС) 16, вход дискретизации которого является входом дискретизации ППМ 5. Выход данных МУЦОС 16 является выходом данных ППМ 5 и соединен с одним из М входов данных СУЦДО 7, управляющий вход МУЦОС 16 является управляющим входом ППМ 5 и соединен с одним из М управляющих выходов СУЦДО 7. Первый, второй и третий управляющие выходы МУЦОС 16 соединены соответственно с первым, вторым и третьим управляющими входами каналов.
Выход данных СУЦДО 7 соединен со входом данных БОРЛИ 4, а его M+1-й управляющий выход соединен с управляющим входом СФРС 6.
СУЦДО 7 (фиг. 2) имеет K формирователей 17 по числу формируемых лучей, каждый из которых содержит М каналов, при этом входы m-ных каналов в формирователях 17 объединены. Каждый канал формирователя 17 содержит перемножитель 18, первый вход которого является входом канала, ко второму входу подключен выход постоянного запоминающего устройства (ПЗУ) 19, а выход перемножителя 18 является выходом канала и подключен к одному из М входов цифрового сумматора 20, выход которого подключен к одному из L входов интерфейса (И) 21. Выход интерфейса 21 является выходом СУЦДО 7. Устройство управления (УУ) 22, вход которого является управляющим входом СУЦДО 7, имеет М+1 управляющих выходов, которые являются управляющими выходами СУЦДО 7. Все блоки СУЦДО 7 могут быть выполнены, в зависимости от числа ППМ 5 и числа формируемых лучей К, в виде одной или нескольких программируемых логических интегральных схем (ПЛИС).
ПРЧ 13 (фиг. 3) представляет собой последовательно соединенные смеситель (СМ) 23, вход которого является входом ПРЧ 13, а гетеродинный вход - гетеродинным входом ПРЧ 13 и усилитель промежуточной частоты (УПЧ) 24, выход которого является выходом промежуточной частоты (ПЧ) ПРЧ 13, а управляющий вход - управляющим входом ПРЧ 13.
МУЦОС 16 (фиг. 4) содержит N аналого-цифровых преобразователей (АЦП) 25, входы которых являются входами ПЧ МУЦОС 16, тактовые входы соединены с выходами третьего делителя мощности ДМ3 26, вход которого является входом дискретизации МУЦОС 16. Выходы АЦП 25 соединены со входами данных блока управления и обработки (БУО) 27. Первый, второй и третий управляющие выходы БУО 27 являются соответственно первым, вторым и третьим управляющими выходами МУЦОС 16. Выход данных и управляющий вход БУО 27 являются соответственно выходом данных и управляющим входом МУЦОС 16. БУО 27 может быть выполнен в виде ПЛИС.
СФРС 6 представляет собой три синтезатора частоты, обеспечивающих формирование зондирующего сигнала ЗС, сигнала тактовой частоты дискретизации Fд, и сигнала гетеродина Fгет. При этом могут быть использованы, например, синтезаторы из [4 - стр. 142-143. Mini-Circuits. RF & Microwave components guide. 2010]. Сформированные в синтезаторах сигналы разветвляются на М выходов с помощью делителей мощности [4- стр. 136 -140].
Первый, второй и третий делители мощности ДМ1 14, ДМ2 15 и ДМ3 26 могут быть выполнены на основе готовых делителей [4- стр. 136 -140].
БОРЛИ 4 представляет собой ЭВМ, обеспечивающую обработку отсчетов сигнала по заданному алгоритму.
БУ 2 представляет собой ЭВМ, обеспечивающую управление работой устройств ФАР 1, ОПУ 3 и БОРЛИ 4, а также отображение результатов радиолокационной обработки.
ОПУ 3 обеспечивает вращение ФАР 1 в азимутальной плоскости и может быть выполнено на основе опорно-поворотного круга с подшипником и червячного вала с электромотором.
РЛС выполняет обзор пространства путем сканирования по азимуту за счет электронного перемещения передающей и приемной ДН при неподвижной ФАР 1 или механическим вращением ФАР 1 с помощью ОПУ 3. В первом случае сектор сканирования по азимуту определяется максимальным сектором сканирования ФАР 1, а во втором случае сектор сканирования по азимуту равен 360°.
В каждом азимутальном положении ДН в режиме передачи формируют передающую ДН игольчатой или веерообразной формы с помощью ФАР 1, ширина ДН определяется требуемым угловым размером зоны обнаружения радиолокационной станции. Так, при большом секторе обзора в угломестной плоскости ДН может иметь веерообразную форму в угломестной плоскости. Формирование передающей ДН производится путем установки в ППМ 5 из состава ФАР 1 требуемых фазовых и амплитудных соотношений регулировкой сдвига фазы зондирующего сигнала ЗС в фазовращателях 8 и коэффициента усиления твердотельных усилителей мощности УМ 9.
Для плоской прямоугольной ФАР 1, апертура которой содержит Nx АЭ 11, установленных вдоль координаты X на расстоянии dx, и Ny АЭ 11, установленных вдоль координаты Y, на расстоянии dy, диаграмма направленности F(ϕ,θ) определяется как [3 - с. 27-28]:

где 
где Аxm, Ayn - весовые коэффициенты амплитудного распределения в твердотельных УМ 9, соединенных с АЭ 11, которые расположены вдоль координат X и Y соответственно;
ψxm, ψyn - весовые коэффициенты фазового распределения, представленные в виде фазовых сдвигов в фазовращателях 8, соединенных через твердотельный УМ 9 и циркулятор 10 с АЭ 11, которые расположены вдоль координат X и Y соответственно.
Для обзорных РЛС веерообразная ДН может иметь косекансную форму [5 - рис. 5.1 - Бакулев П.А. Радиолокационные системы. М. Радиотехника. 2004. 320 с]. Такая форма ДН формируется путем установки соответствующих амплитудных и фазовых коэффициентов в твердотельных усилителях мощности УМ 9 и фазовращателях 8, например, как описано в [6 - Лопатенко Э.В., Марусич А.А. Диаграмма направленности антенны cosec с низким уровнем боковых лепестков. //Радиотехника. 2006. №12. с. 49-53.].
После усиления зондирующего сигнала ЗС в твердотельных УМ 9 он поступает на подключенный к этому каналу антенный элемент (АЭ) 11.
После излучения зондирующего сигнала ЗС ФАР 1 переходит в режим приема.
В режиме приема принимаемые отраженные сигналы с выходов АЭ 11 в каждом ППМ 5 проходят через циркулятор 10, усиливаются в МШУ 12, преобразуются по частоте в ПРЧ 13 и представляются в виде цифровых отсчетов Smn(tK) в момент с помощью АЦП 25. Полученные отсчеты в БУО 27
преобразуются в последовательный код и передаются в СУЦДО 7.
Из полученных цифровых отсчетов формируют приемную многолучевую в угломестной плоскости ДН с лучами игольчатой формы путем взвешенного суммирования в СУЦДО 7. Отсчеты i-го луча с направлением максимума ϕi, θi вычисляются путем умножения цифрового потока с каждого АЦП 25 Smn(t) в перемножителях 18 на весовой коэффициент Wmn(ϕi, θi) из ПЗУ 19 и суммирования в цифровом сумматоре 20. Диаграмма направленности для г-го приемного луча имеет вид

где 
Число лучей L определяется шириной передающей ДН и шириной одного луча. Так, при использовании передающей ДН веерообразной формы в угломестной плоскости, лучи приемной многолучевой ДН имеют игольчатую форму и расположены в угломестной плоскости, при этом направления их максимумов обеспечивает перекрытие соседних лучей по уровню половинной мощности. Ширина приемной диаграммы направленности в угломестной плоскости соответствует ширине передающей ДН.
Сформированные отсчеты К приемных лучей с выходов формирователей 17 поступают в интерфейс 21, где преобразуются в последовательную форму и в виде последовательных кодов передаются в БОРЛИ 4, где в каждой из соседних пар сформированных приемных лучей выполняют обнаружение объектов по отраженным сигналам, измерение их дальности и угломестных координат, соответствующих угломестному положению тех приемных лучей, в которых они были обнаружены [3, с. 144-151, 174-177].
Выполняют оценку параметров траектории объектов [3, с. 183-185] и оценку характеристик объектов [3, с. 331-333].
Предлагаемый способ построения РЛС обеспечивает следующие преимущества по сравнению с прототипом:
- увеличивает дальность действия РЛС. В прототипе ФАР разделена на пассивные подрешетки, внутри подрешеток каждый антенный элемент соединяют через фазовращатель с сумматором подрешетки, который в режиме передачи используют как делитель мощности. В то время как в предлагаемом способе АЭ 11 соединен линией связи минимальной длины со входом-выходом одного из приемопередающего канала многоканального ППМ 5. Такое построение сокращает потери выходной мощности зондирующего сигнала и снижает коэффициент шума приемной части ППМ 5, что ведет к увеличению дальности действия РЛС на 17,5…24,5% по сравнению с прототипом.
- увеличение надежности работы РЛС. В прототипе используется один усилитель мощности зондирующего сигнала, сигнал с выхода которого делят по числу подрешеток, распределяют на подрешетки, в которых, в свою очередь, сигнал делится по числу антенных элементов. Такое построение прототипа приводит к сильной зависимости надежности РЛС от надежности единственного усилителя мощности. В то же время в предлагаемом способе в каждом приемопередающем канале установлен твердотельный усилитель мощности УМ 9 и отказ нескольких из них при большом числе каналов не приводит к значительному изменению параметров РЛС в целом;
- в прототипе используется передающий луч игольчатой формы, что значительно увеличивает время обзора, в случае если заданный угол обзора в угломестной плоскости ϕАЗ превышает ширину передающей ДН в угломестной плоскости ΔϕАЗ. При этом время обзора увеличивается в ϕАЗ/ΔϕАЗ раз, поскольку необходимо выполнять обзор пространства построчным сканированием, т.е. за несколько оборотов ФАР 1 с разным углом наклона ДН в угломестной плоскости. В то время как в предлагаемом способе кроме игольчатой может использоваться веерообразная форма ДН, что обеспечивает снижение времени обзора за счет перекрытия всего заданного угломестного угла обзора за один оборот ФАР 1. При использовании веерообразной формы передающей ДН число лучей многолучевой приемной ДН выбирается таким, чтобы угломестная ширина приемной ДН соответствовала угломестной ширине передающей ДН;
- в прототипе используется неподвижная ФАР 1, при этом сектор обзора РЛС по азимуту ограничен возможностью ее электронного сканирования. Типичным значением сектора обзора является ±45°…±60°, т.е для кругового обзора пространства требуется три или четыре неподвижных ФАР, что значительно увеличивает стоимость РЛС. В то время как в предлагаемом способе используется опорно-поворотное устройство, что обеспечивает работу РЛС или в режиме секторного сканирования с помощью электронного перемещения ДН при неподвижной ФАР 1, или в режиме кругового сканировании пространства по азимуту за счет механического вращения ФАР 1, с помощью ОПУ 3, что значительно снижает стоимость РЛС.
Работоспособность предлагаемого способа была проверена на макете устройства (фиг. 1). Испытания показали совпадение полученных характеристик с расчетными.
Способ построения радиолокационной станции, при котором излучают зондирующий сигнал и принимают отраженные сигналы антенной системой в виде плоской фазированной антенной решетки, в режиме передачи формируют зондирующий сигнал, усиливают его по мощности, при этом устанавливают направление максимума передающей диаграммы направленности путем изменения фазы зондирующего сигнала с помощью фазовращателей, а в режиме приема усиливают принимаемые сигналы, преобразуют по частоте, преобразуют в цифровую форму и формируют приемную диаграмму направленности путем весового суммирования полученных отсчетов, при выполнении радиолокационного обзора производят сканирование максимумами передающей и приемной диаграмм направленности фазированной антенной решетки в заданной зоне обзора и выполняют обнаружение отраженных от объектов сигналов по отсчетам принимаемого сигнала, формируют радиолокационные данные обнаруженных объектов, выполняют оценку численных значений координат объектов и параметров траектории объектов, отличающийся тем, что устанавливают антенную систему на опорно-поворотное устройство, устанавливают антенные элементы фазированной антенной решетки на передние панели многоканальных приемопередающих модулей с шагом между ними по вертикали и горизонтали, определяемым требуемым сектором электронного сканирования, соответственно, в вертикальной и горизонтальной плоскостях, соединяют каждый антенный элемент с антенным входом-выходом одного из каналов многоканального приемопередающего модуля, формируют антенное полотно фазированной антенной решетки из многоканальных приемопередающих модулей, устанавливая их рядом друг с другом таким образом, чтобы поверхности их передних панелей были расположены в одной плоскости, а расстояние между антенными элементами сохранялось неизменным в вертикальной и горизонтальной плоскостях, при этом в режиме передачи в передающей части каждого приемопередающего канала изменяют фазу зондирующего сигнала с помощью фазовращателя и усиливают в твердотельном усилителе мощности таким образом, чтобы в пространстве формировалась передающая диаграмма направленности игольчатой или веерообразной формы, ширина которой определяется требуемым угловым размером зоны обнаружения радиолокационной станции, в режиме приема в каждом приемопередающем канале усиливают принимаемые сигналы и преобразуют их по частоте, сигналы с выходов приемопередающих каналов преобразуют в цифровую форму, при этом используют полученные отсчеты для формирования многолучевой приемной диаграммы направленности, каждый луч которой имеет игольчатую форму, а соседние лучи перекрываются по уровню половинной мощности, причем ширина приемной диаграммы направленности соответствует ширине передающей диаграммы направленности, при обнаружении объектов, измерении их дальности и угловых координат используют моноимпульсный метод обработки сигналов каждой из соседних пар приемных лучей, при этом для сканирования в ограниченном секторе по азимуту используют электронную перестройку приемной и передающей диаграмм направленности при неподвижной антенной системе, а для кругового обзора по азимуту используют вращение антенной системы с помощью опорно-поворотного устройства.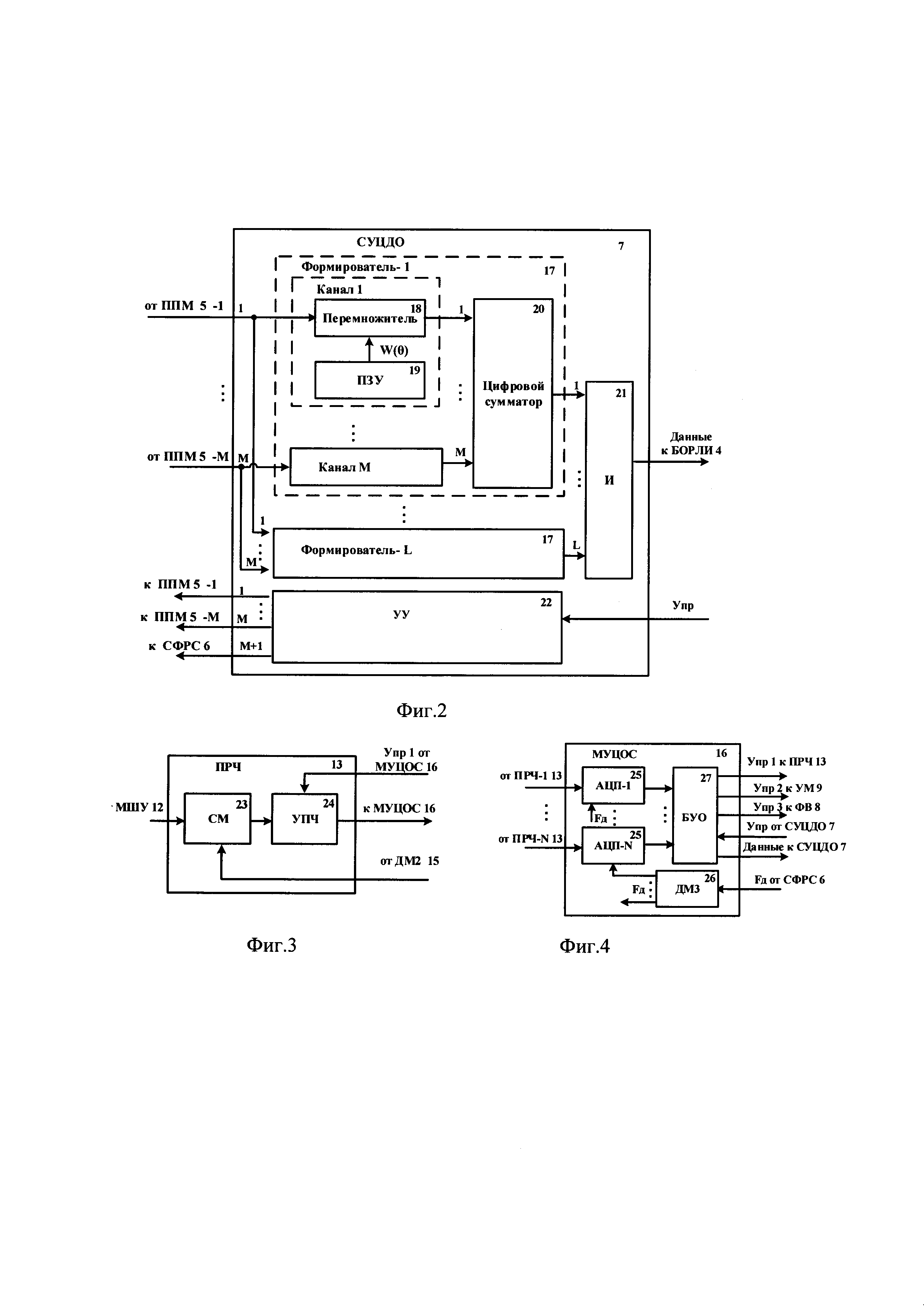
Способ обучения искусственной нейронной сети
Способ построения антенной системы с изменяемым углом плоскости линейной поляризации
Голографический способ измерения доплеровского сдвига частоты
Способ построения антенной решетки
Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей
Способ обнаружения малых беспилотных летательных аппаратов
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой
Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой
Способ формирования диаграммы направленности
Способ обзора пространства
Мощный свч транзистор
Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса
Уравновешенное опорно-поворотное устройство

