Результат интеллектуальной деятельности: Автоматизированный сортировщик-подборщик манипулятора-трипода
Вид РИД
Изобретение
Изобретение относится к машиностроению, в частности к робототехнике, а именно к манипуляторам, используемых в производственных линиях для выполнения технологических операций, связанных с сортировкой, укладкой и упаковкой продукции, применяемой в пищевой, химической промышленностях и прочих отраслях народного хозяйства.
Известен манипулятор-трипод параллельно-последовательной структуры, установленный на транспортном средстве, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, с целью расширения зоны действия крана и повышения жесткости конструкции, он снабжен дополнительным цилиндром, размещенным на основании, выполненным в виде плоской треугольной фермы, одна сторона которой закреплена на транспортном средстве с возможностью поворота в вертикальной плоскости, при этом в точке соединения трех цилиндров с помощью пятиподвижного шарнира закреплен трехстепенной управляемый захват, представляющий собой три последовательно соединенных между собой механизма, конструкции которых соединены с помощью вращательных цилиндрических шарниров с кинематической парой пятого класса, и для их поворота предусмотрены шаговые двигатели, закрепленные на конструкции механизмов (Патент РФ №2616493, опубл. 2017).
Наиболее близким по технической сущности к заявленному автоматизированному сортировщику-подборщику манипулятора-трипода является манипулятор-трипод промышленного назначения, содержащий основание, шарниры, исполнительные звенья, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, при этом исполнительные звенья выполнены в виде линейных приводов, каждый из которых соединяется между собой и с двухстепенным управляемым захватом, который представлен в виде двух независимых последовательно соединенных между собой звеньев в виде полусфер и грузозахватным органом, при этом звенья соединены между собой посредством вращательных цилиндрических шарниров с кинематической парой пятого класса, оси симметрии звеньев двухстепенного управляемого захвата перпендикулярны друг другу, а ось симметрии пятиподвижного сферического шарнира совпадает с одной из осей двухстепенного управляемого захвата, каждое звено имеет жесткое крепление с шаговым двигателем, основание выполнено в виде равностороннего треугольника, на котором установлены датчики технического зрения (Патент РФ №2651781, опубл. 2018).
К недостаткам известных технических решений следует отнести: короткая (незначительная) трасса перемещения груза вследствие ограниченной степени подвижности манипулятора.
Задача - совершенствование технологического процесса выполнения операций сортировки, подборки и транспортировки.
Технический результат - точечно выборочная сортировка и подборка груза по форме и размеру при выполнении технологических операций, возможность осуществления перемещения груза за пределы зоны обслуживания манипулятора-трипода.
Указанный технический результат достигается автоматизированным сортировщиком-подборщиком манипулятора-трипода, содержащим основание, шарниры, исполнительные звенья в виде трех линейных приводов, управляемый захват, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, датчики технического зрения, согласно изобретению дополнительно содержит шаговый двигатель, при этом управляемый захват представлен в виде полусферического звена с одной степенью подвижности, грузозахватный орган представлен в виде конусовидного заборного всасывающего устройства и гибкого продуктопровода, при этом диаметр выходного отверстия конусовидного заборного всасывающего устройства прямо пропорционален диаметру входного отверстия гибкого продуктопровода, расположенных последовательно друг за другом и жестко соединенных между собой, при этом заборное всасывающее устройство соединено с полусферическим звеном управляемого захвата, а шаговый двигатель жестко крепится корпусом с полусферическим звеном управляемого захвата.
Изобретение поясняется чертежами.
На фиг. 1 изображен общий вид автоматизированного сортировщика-подборщика манипулятора-трипода.
На фиг. 2 кинематическая схема управляемого захвата.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Предлагаемый автоматизированный сортировщик-подборщик манипулятора-трипода состоит из пространственного приводного трехстержневого механизма в виде треугольной пирамиды со звеньями переменной длины в качестве исполнительных звеньев. Механизм содержит основание 1, к вершинам которого посредством шарниров 2 с двумя степенями свободы закреплены корпуса трех линейных приводов 3-5 (фиг. 1). В вершине пирамиды в одной точке соединяются между собой штоки трех линейных приводов 3-5 и управляемый захват 6 с помощью пятиподвижного сферического шарнира 7. Для распознавания и определения координат объекта манипулирования на основании 1 установлены датчики технического зрения 8.
Управляемый захват 6 (фиг. 2) содержит полусферическое звено 9 с одной степенью подвижности, грузозахватный орган в виде заборного конусовидного всасывающего устройства 10, гибкого продуктопровода 11 расположенных последовательно друг за другом и жестко соединенные между собой. Для вращения полусферического звена 9 предусмотрен шаговый двигатель 12, который жестко крепится корпусом к конструкции полусферического звена 9.
Работа автоматизированного сортировщика-подборщика манипулятора-трипода осуществляется следующим образом.
Датчики технического зрения 8, установленные на основании 1 распознают груз по форме и размеру и определяют его координаты расположения. После обработки данных по грузу, манипулятор-трипод от систем управления получает команду на перемещение, которое выполняется за счет работы пространственного приводного трехстержневого механизма.
Пространственный приводной трехстержневой механизм, представленный в виде пирамиды перемещает управляемый захват 6, грузозахватный орган 10 с гибким продуктопроводом 11 последовательно соединенные между собой следующим образом. Пространственный приводной трехстержневой механизм, образованный основанием 1, шарнирами 2 и линейными приводами 3-5 изменяет структуру геометрии за счет изменения длин штока хотя бы одного линейного привода 3, 4 или 5. Шарниры 2 обеспечивают необходимую двухстепенную подвижность звеньев 3-5 относительно основания 1. Вследствие изменения геометрии пространственной структуры манипулятора-трипода перемещается сферический пятиподвижный шарнир 7, который увлекает за собой управляемый захват 6 и грузозахватный орган 10. Таким образом, максимальное перемещение грузозахватного органа 10 выполняет параллельно-пространственная структура манипулятора-трипода. Дальнейшее регулирование вертикального положения грузозахватного органа 10 в пространстве осуществляется под управлением шагового двигателя 12 полусферического звена 9 управляемого захвата 6. При включении шагового двигателя 12, полусферическое звено 9 начинает поворачиваться на определенный угол α относительно своей оси симметрии Z2, пока грузозахватный орган 10 полностью не с ориентируется над грузом. Отобранный груз по форме и размеру засасывается через конусовидное заборное всасывающее устройство и далее перемещается по гибкому продуктопроводу 11.
Таким образом, автоматизированный сортировщик-подборщик манипулятора-трипода, содержащий грузозахватный орган в виде конусовидного заборного всасывающего устройства и гибкого продуктопровода позволяет точечно сортировать и подбирать по форме и размеру груз, а также перемещать его на большие расстояния за пределы зоны обслуживания манипулятора-трипода.
Автоматизированный сортировщик-подборщик манипулятора-трипода, содержащий основание, шарниры, исполнительные звенья в виде трех линейных приводов, управляемый захват, соединенные между собой с помощью пятиподвижного сферического шарнира и с грузозахватным органом, датчики технического зрения, отличающийся тем, что он дополнительно содержит шаговый двигатель, при этом управляемый захват представлен в виде полусферического звена с одной степенью подвижности, грузозахватный орган представлен в виде конусовидного заборного всасывающего устройства и гибкого продуктопровода, при этом диаметр выходного отверстия конусовидного заборного всасывающего устройства прямо пропорционален диаметру входного отверстия гибкого продуктопровода, расположенных последовательно друг за другом и жестко соединенных между собой, при этом заборное всасывающее устройство соединено с полусферическим звеном управляемого захвата, а шаговый двигатель жестко крепится корпусом с полусферическим звеном управляемого захвата.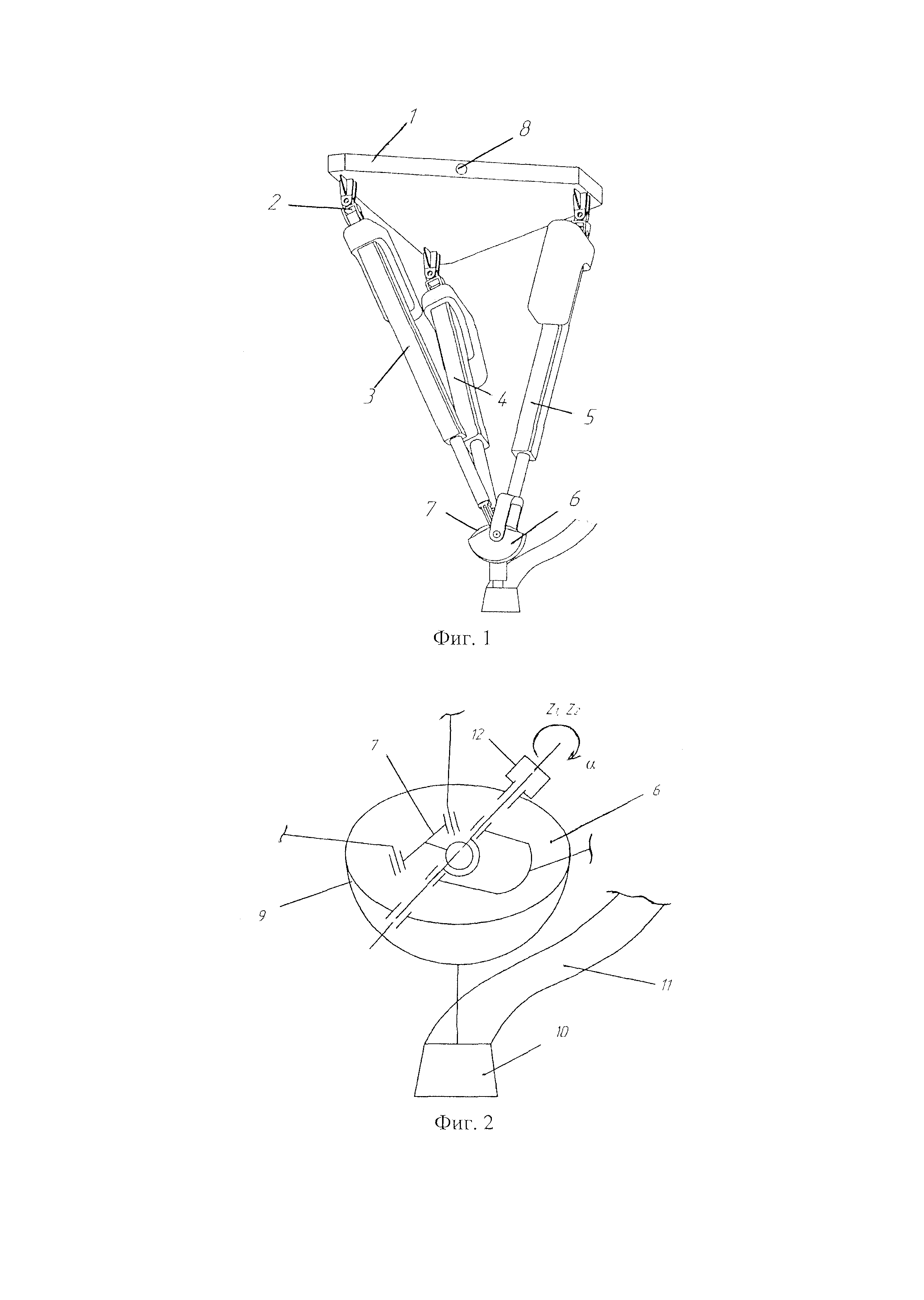
Машина для внесения твердых органических удобрений
Комбинированный почвообрабатывающий агрегат
Чизельный глубокорыхлитель-удобритель
Рабочий орган глубокорыхлителя-удобрителя
Картофелеуборочный комбайн
Почвообрабатывающее орудие
Агрегат для измельчения и внесения в почву твердых органических удобрений
Рабочий орган плоскореза глубокорыхлителя-удобрителя
Устройство для очистки топливных фильтров двигателей
Картофелекопатель
Робот-пропольщик
Робот-пропольщик
Устройство для очистки корпусов судов
Робот-погрузчик сеток с овощами
Устройство для визуализации направлений реакций плоских стержневых конструкций
Мобильный робот для побелки стволов деревьев
Робот-погрузчик сеток с овощами
Роботизированный комплекс для полосового опрыскивания овощных культур
Навесной вилочный погрузчик
Робот-погрузчик сеток с овощами

