Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ АМОРТИЗАЦИИ У ИСКУССТВЕННОГО СУСТАВА
Вид РИД
Изобретение
Изобретение относится к способу управления изменением сопротивления у искусственного сустава ортеза, экзоскелета или протеза нижней конечности, причем искусственный сустав имеет верхнюю часть и нижнюю часть, которые закреплены друг на друге с возможностью поворота вокруг оси поворота, причем между верхней частью и нижней частью закреплен блок сопротивления для предоставления сопротивления против сгибания или разгибания искусственного сустава, и с блоком сопротивления согласовано регулировочное устройство, при помощи которого изменяется сопротивление, если сигнал датчика согласованного с регулировочным устройством блока управления активирует регулировочное устройство. Способ используется в частности для управления характером движения или амортизации искусственных коленных суставов, тем не менее он не ограничен этим, а может также применяться для тазобедренных или голеностопных суставов.
Искусственные суставы для ортезов, экзоскелетов или протезов имеют верхнюю часть с верхним соединительным элементом и нижнюю часть с нижним соединительным элементом, которые шарнирно друг с другом соединены. На верхнем соединительном элементе у искусственных коленных суставов расположены, как правило, захваты для культи бедра или шина бедра, в то время как на нижнем соединительном элементе расположена труба голени или шина голени со стопой протеза или элементом для стопы. При еще имеющейся голени верхняя часть протеза расположена на гильзе протеза для голени, а на нижней части закреплена стопа протеза, у ортезов соответствующие компоненты закреплены на подходящих частях тела. В самом простом случае верхняя часть и нижняя часть соединены друг с другом с возможностью поворота на одноосном шарнире.
Для того чтобы была возможность наиболее естественно воспроизводить или поддерживать различные требования во время различных фаз одного шага или при других движениях или операциях, зачатую предусмотрено устройство сопротивления, которое предоставляет сопротивление сгибания и сопротивление разгибания. Посредством сопротивления сгибания устанавливается, насколько легко нижнюю часть можно поворачивать относительно верхней части при приложенном усилии. Сопротивление разгибания замедляет у коленного сустава движение нижней части вперед и образует среди прочего упор разгибания, сопротивление сгибания предотвращает непреднамеренное сгибание и ограничивает максимальное сгибание на фазе маха (проноса ноги в воздухе).
Из DE 10 2008 008 284 A1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, с которым согласованы несколько датчиков, например, датчик угла сгибания, датчик ускорения, датчик наклона и/или датчик усилия. В зависимости от данных датчиков определяется положение для упора разгибания.
DE 10 2006 021 802 A1 описывает управление пассивным коленным суставом протеза, включающее в себя регулируемую амортизацию в направлении сгибания для адаптации устройства протеза с расположенными с верхней стороны соединительными средствами и соединительным элементом для искусственной стопы. Адаптация осуществляется к подъему по лестнице, причем обнаруживается происходящее при низком моменте поднятие стопы протеза, и амортизация сгибания понижается во время фазы поднятия ниже уровня, который подходит для ходьбы по плоскости. Амортизация сгибания может увеличиваться в зависимости от изменения угла сгибания колена и в зависимости от действующего на голень осевого усилия.
DE 10 2009 052 887 A1 описывает среди прочего способ управления суставом ортеза или протеза при помощи устройства сопротивления и датчиков, причем датчиками во время использования сустава предоставляются данные о состоянии. Датчики регистрируют моменты или усилия, причем данные датчиков, по меньшей мере, двух установленных параметров увязываются друг с другом посредством математической операции, и вследствие этого рассчитывается вспомогательная переменная, которая берется за основу управления сопротивлением сгибания и/или разгибания.
Для управления изменением характера амортизации данные датчиков согласно уровню техники количественно оцениваются, то есть, как правило, задаются определенные пороговые значения, при достижении или недостижении которых активируется или деактивируется привод, так что устройство сопротивления предоставляет повышенное или пониженное сопротивление сгибания или разгибания.
Пациенты могут использовать протезы, экзоскелеты или ортезы при различных окружающих условиях. Они могут спускаться по лестницам, проходить вниз по склонам или ходить по плоскости с различными скоростями. Кроме того, пациентами могут переноситься грузы, что также сказывается на поведении протеза или ортеза. В частности, после окончания фазы маха, то есть после касания земли экипированной ногой, когда вес тела переносится на экипированную ногу, существует для пациента постоянная потребность в повышенной безопасности. Однако слишком высокая начальная амортизация сгибания, то есть амортизация, которая препятствует сгибанию искусственного коленного сустава, привела бы к ударной нагрузке в тазобедренном суставе, что повлекло бы за собой уменьшение комфорта ношения и принятия протеза или ортеза.
Современные компьютеризованные амортизирующие устройства могут очень точно и быстро адаптировать сопротивление против сгибания или разгибания. Ограничивающими факторами являются точность определенных или зарегистрированных данных, сложность обрабатываемых данных, достоверность обнаружения выполненного в каждом случае движения и конструктивная сложность.
Задача данного изобретения предоставить способ управления искусственным суставом нижней конечности, в частности искусственным коленным суставом, при помощи которого может достигаться надежная, быстрая и экономичная адаптация к различным ситуациям во время ходьбы и комфортный характер ходьбы при одновременной максимальной безопасности.
Согласно изобретению эта задача решается с помощью способа с признаками основного независимого пункта формулы изобретения. Предпочтительные варианты осуществления и усовершенствования изобретения раскрыты в зависимых пунктах формулы изобретения, описании, а также на чертеже.
Соответствующий изобретению способ управления изменением амортизации у искусственного сустава ортеза, экзоскелета или протеза нижней конечности, причем искусственный сустав имеет верхнюю часть и нижнюю часть, которые закреплены друг на друге с возможностью поворота вокруг оси поворота, причем между верхней частью и нижней частью закреплен блок сопротивления для предоставления сопротивления против сгибания или разгибания искусственного сустава, и с блоком сопротивления согласовано регулировочное устройство, при помощи которого изменяется сопротивление, если сигнал датчика согласованного с регулировочным устройством блока управления активирует регулировочное устройство, предусматривает, что сопротивление изменяется в зависимости от положения и/или длины хорды ноги и/или их производных по времени. Хорда ноги используется таким образом в качестве управляющего параметра или вспомогательной переменной, для того чтобы на основе положения или длины, или комбинации из положения и длины хорды ноги распознавать, какое именно движение выполняется, так что необходимые изменения сопротивления могут адаптивно инициироваться для соответствующей ситуации во время ходьбы или других действий, таких как присаживание, вставание, езда на велосипеде, ходьба назад или тому подобное. Положение хорды ноги достоверно предоставляет данные об ориентации ноги, вне зависимости от сгибания, например, сгибания фазы остановки или разгибания фазы остановки. Кроме того, из положения хорды ноги и укорочения хорды ноги без изменения положения можно делать вывод о неподвижном оседании, поворот вперед хорды ноги указывает на ходьбу вниз по наклонной поверхности, а поворот назад, например, на присаживание. На основе анализа этих данных, блоком управления активируется регулировочное устройство, для того чтобы адаптировать сопротивление в блоке сопротивления к соответствующей ситуации во время ходьбы. Для этого сопротивление сгибания и разгибания повышаются или понижаются соответствующим образом. Длина хорды ноги предоставляет помимо этого сведения о ходе выполнения движения, например, если хорда ноги укорачивается при повороте назад, то через это может регистрироваться или, по меньшей мере, определяться ход выполнения движения присаживания. Таким образом, адаптация сопротивления осуществляется на основе этих данных. Равным образом актуальны производные по времени относительно положения или длины хорды ноги. Определяются скорости или ускорения соответствующего движения, что дает, например, указание о скорости ходьбы, так что измененные в соответствии с этим значения сопротивления обеспечиваются на соответствующих фазах движения. Способ ориентирован не только на управление блоками сопротивления в искусственных коленных суставах, наоборот также у амортизированных голеностопных суставов может соответствующий блок сопротивления изменяться в зависимости от длины и/или положения хорды ноги или их производных по времени. То же самое относится также к блоку сопротивления в тазобедренном суставе. Способ может применяться к ортезу, протезу или особой форме ортеза, а именно экзоскелету.
В качестве хорды ноги предпочтительно используется соединительная линия между точкой поворота тазобедренного сустава и точкой стопы. Точка поворота тазобедренного сустава определяется, например, у протеза коленного сустава техником-ортопедом. Точка поворота тазобедренного сустава задает также длину сегмента бедра, которая определена как расстояние между осью поворота или осью колена и точкой поворота тазобедренного сустава. Расстоянием между осью колена и точкой стопы определена длина голени. В качестве точки стопы может определяться либо середина стопы, мгновенный полюс движения перекатывания, либо конечная точка вертикали голени на уровне подошвы элемента для стопы, стопы протеза или на земле. У ортезов или экзоскелетов элемент для опоры еще имеющейся естественной стопы не является обязательно необходимым, если должно осуществляться управление блоком сопротивления между элементом для бедра и элементом для голени.
Положение хорды ноги или же угол хорды ноги может определяться как сумма из выявленного угла голени и умноженного на коэффициент угла колена. Коэффициент находится в диапазоне между 0,4 и 0,6, предпочтительно положение хорды ноги относительно вертикали определено как сумма из угла голени к вертикали и поделенного пополам (коэффициент 0,5) угла колена. Альтернативно положение хорды ноги может рассчитываться через угол голени, угол колена и длину сегмента бедра с длиной сегмента голени. Соответствующие длины сегментов известны и сохранены в устройстве управления. Угол голени может выявляться датчиками положения, а угол колена, который отображает относительный поворот вокруг оси колена, определяется как угол между продолжением продольного распространения голени к продольному распространению бедра, измерение может осуществляться датчиком угла.
Угол голени и/или угол бедра могут измеряться напрямую инерциальным датчиком угла. Альтернативно может быть расположен датчик положения на соответствующем другом сегменте, причем датчиком угла колена определяется угол колена, и из комбинации инерциального угла бедра с углом колена определяется угол голени, или из комбинации датчика положения на голени и датчика угла колена определяется угол бедра.
Длина хорды ноги может определяться из угла колена и длин сегментов бедра и голени. При помощи длины хорды ноги и ее изменения во времени делаются выводы о скоростях движения, в зависимости от которых изменяются сопротивления в блоке амортизации.
Сопротивление в блоке сопротивления может также изменяться в зависимости от направления изменения положения и/или длины хорды ноги. Так поворот вперед может благодаря уменьшению угла хорды ноги по направлению к вертикали или увеличению угла хорды ноги в сторону от вертикали обнаруживаться как оседающий шаг при ходьбе вниз по наклонной поверхности, в частности если длина хорды ноги укорачивается. Из укорочения или удлинения хорды ноги делается вывод, выполняется ли движение вставания или движение присаживания, присаживание или вставание или ходьба по лестнице вниз или вверх.
При ходьбе вперед, то есть во всех ситуациях ходьбы, в которых происходит прогрессия вперед, нога перекатывается вперед. Ориентация ноги, то есть ориентация хорды ноги и ее изменение, могут таким образом рассматриваться как параметр хода выполнения для шага. После контакта пятки или "Heel Strike" нога имеет в большинстве случаев наклон назад, то есть хорда ноги наклонена относительно вертикали против направления ходьбы назад. Вслед за этим нога перекатывается вперед, угол хорды ноги уменьшается по направлению к вертикали и затем увеличивается от вертикали, пока в конце фазы остановки не будет иметься максимальный наклон вперед. Для того чтобы уточнять дифференциацию ситуации во время ходьбы, предпочтительно частное из изменения положения хорды ноги и изменения угла бедра или угла голени определяется и используется для оценки ситуации во время ходьбы. Угол бедра или угол голени, или их производные по времени коррелируют с движением ноги во время шага. При ходьбе вперед по плоскости бедро и голень также перекатываются вперед, это происходит как с, так и без сгибания фазы остановки. При ходьбе по наклонной поверхности вниз угол бедра остается приблизительно постоянным, при спуске по лестнице бедро отклоняется назад, угол таким образом увеличивается относительно вертикали. В зависимости от выявленной ситуации во время ходьбы сопротивление затем адаптируется, например, амортизация сгибания повышается или для определенного углового диапазона понижается, для того чтобы делать возможным сгибание при попеременном спуске по лестнице.
В качестве параметра для распознавания ситуации во время ходьбы может определяться и использоваться в частности частное из изменения положения хорды ноги и изменения угла бедра или угла голени. В частности, сопротивление может изменяться в зависимости от уклона графика соответствующей фазовой диаграммы. Если угол бедра или угол голени накладывается на положение хорды ноги или угол хорды ноги, то ситуации во время ходьбы можно различать при помощи уклона на фазовой диаграмме. Уклон может определяться как или из разностного частного Δϕi/Δϕj или дифференциального частного dϕi/dϕj функциональной зависимости двух углов ϕi и ϕj, причем например мгновенная касательная или же секущая может использоваться в течение более длительного промежутка времени. Поведение блока сопротивления может адаптироваться к соответствующим ситуациям в зависимости от уклона.
Наряду с изменением блока сопротивления или сопротивления на основе уклона на фазовой диаграмме углов также предусмотрено, что это изменение сопротивления происходит также на основе частного из их производных по времени, а именно из частного изменения скорости хорды ноги и изменения скорости бедра или скорости голени.
Дальнейшее уточнение дифференциации различных ситуаций во время ходьбы может осуществляться вследствие того, что для обнаружения фазы остановки или стояния используется датчик усилия, который регистрирует действующее на нижнюю часть осевое усилие или действующий на нижнюю часть момент. Если нижняя часть ненагружена или по существу ненагружена, то можно исходить из того, что нижняя конечность находится на фазе маха, фазе подъема или фазе касания земли, что требует другой регулировки сопротивления, чем стояние или фаза остановки при ходьбе. Соответствующий датчик может предоставлять для этого дополнительную информацию.
Предпочтительно сопротивление дополнительно изменяется в зависимости от положения или изменения положения верхней части и/или нижней части. Верхняя часть и нижняя часть действуют предпочтительно в качестве бедра и голени. Предпочтительно сопротивление изменяется в частности, если положение и/или изменение положения хорды ноги находится выше или ниже заданного порогового значения.
Само собой разумеется, положение может изменяться в зависимости ото всех этих указанных параметров или лишь от одного из указанных параметров.
Блок сопротивления может быть выполнен, например, в виде привода, например, в виде гидравлического, пневматического, магнитореологического, магнитного, электрического, механического или электромагнитного блока сопротивления. У гидравлических или пневматических блоков сопротивления закрываются перепускные каналы, так что по этим перепускным каналам никакая среда больше не может перетекать из камеры разгибания в камеру сгибания. Таким образом, поток среды между камерой разгибания и камерой сгибания может при необходимости также полностью блокироваться. У механических блоков сопротивления, например, трение повышается настолько, что дальнейшее сгибание не может происходить. То же самое относится к приводимым в действие электрически блокам сопротивления.
Также могут использоваться приводы, которые и активно вводят энергию в систему, и наоборот выводят энергию из системы и таким образом действуют в качестве блока сопротивления. Приводы могут быть выполнены, например, в виде электродвигателей, гидравлических или пневматических насосов или пьезоэлектрических элементов.
Далее примеры осуществления изобретения разъясняются более подробно при помощи приложенного чертежа. На чертеже показаны:
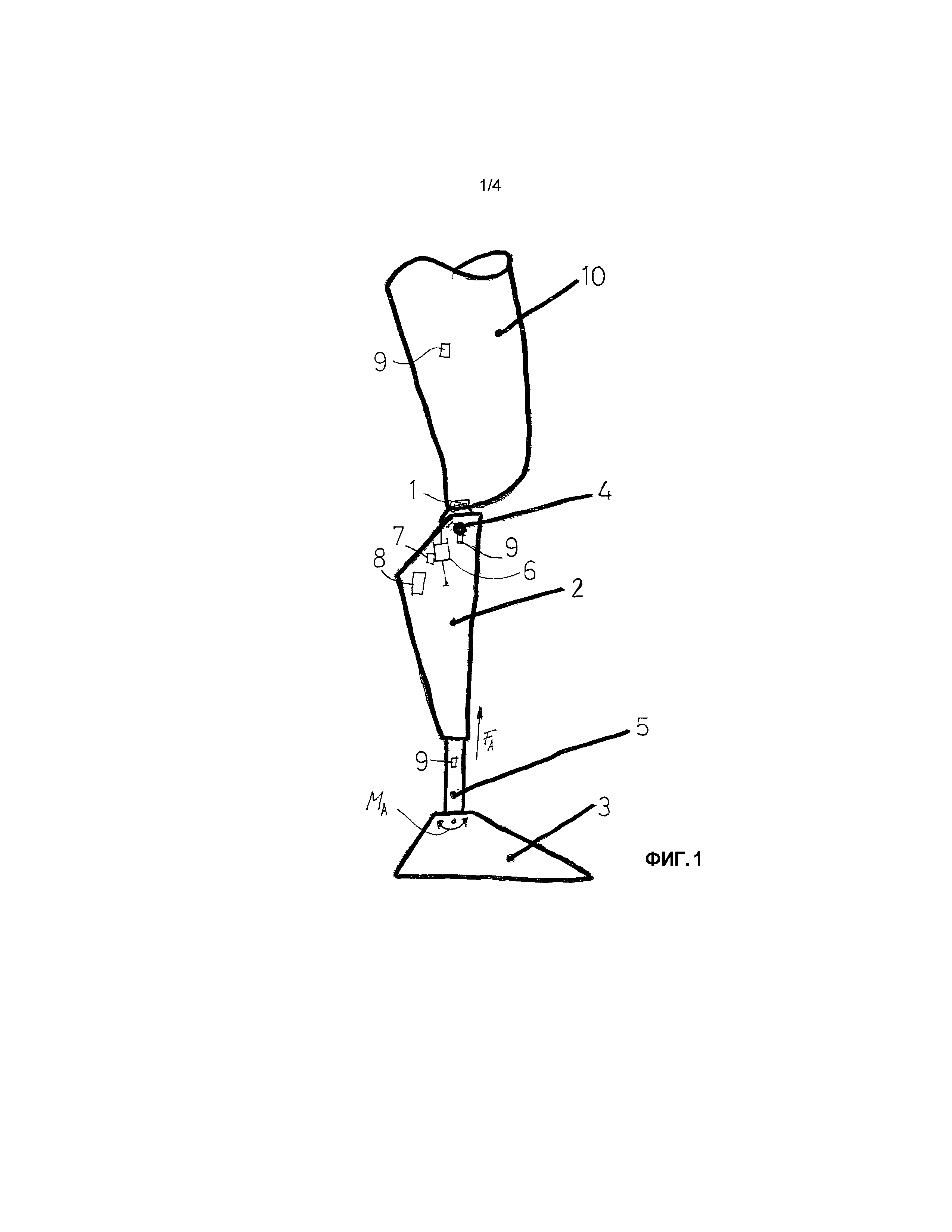
фиг. 1 - схематичное изображение протеза ноги;
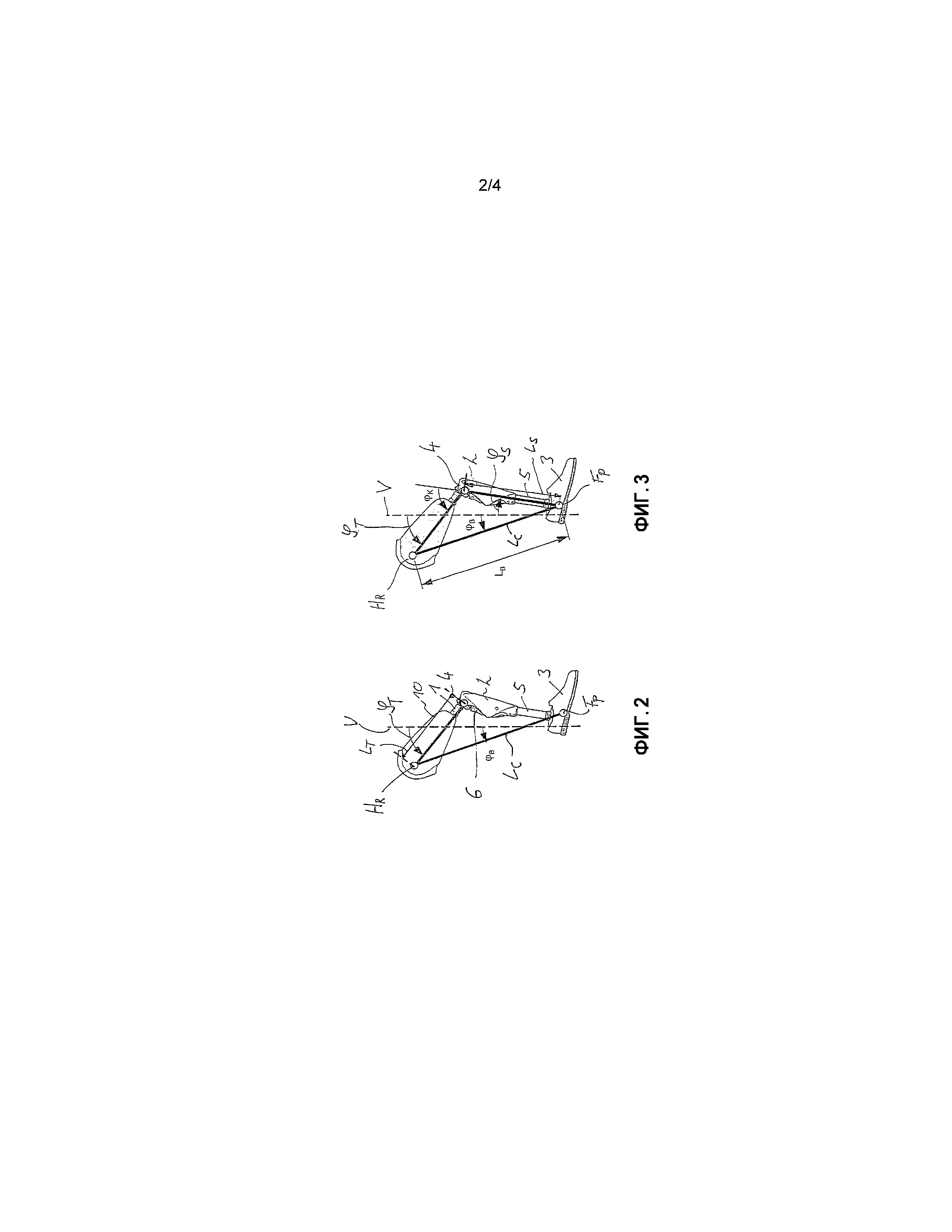
фиг. 2 - схематичное изображение протеза колена с углами;
фиг. 3 - изображение согласно фиг. 2 с обозначением параметров;
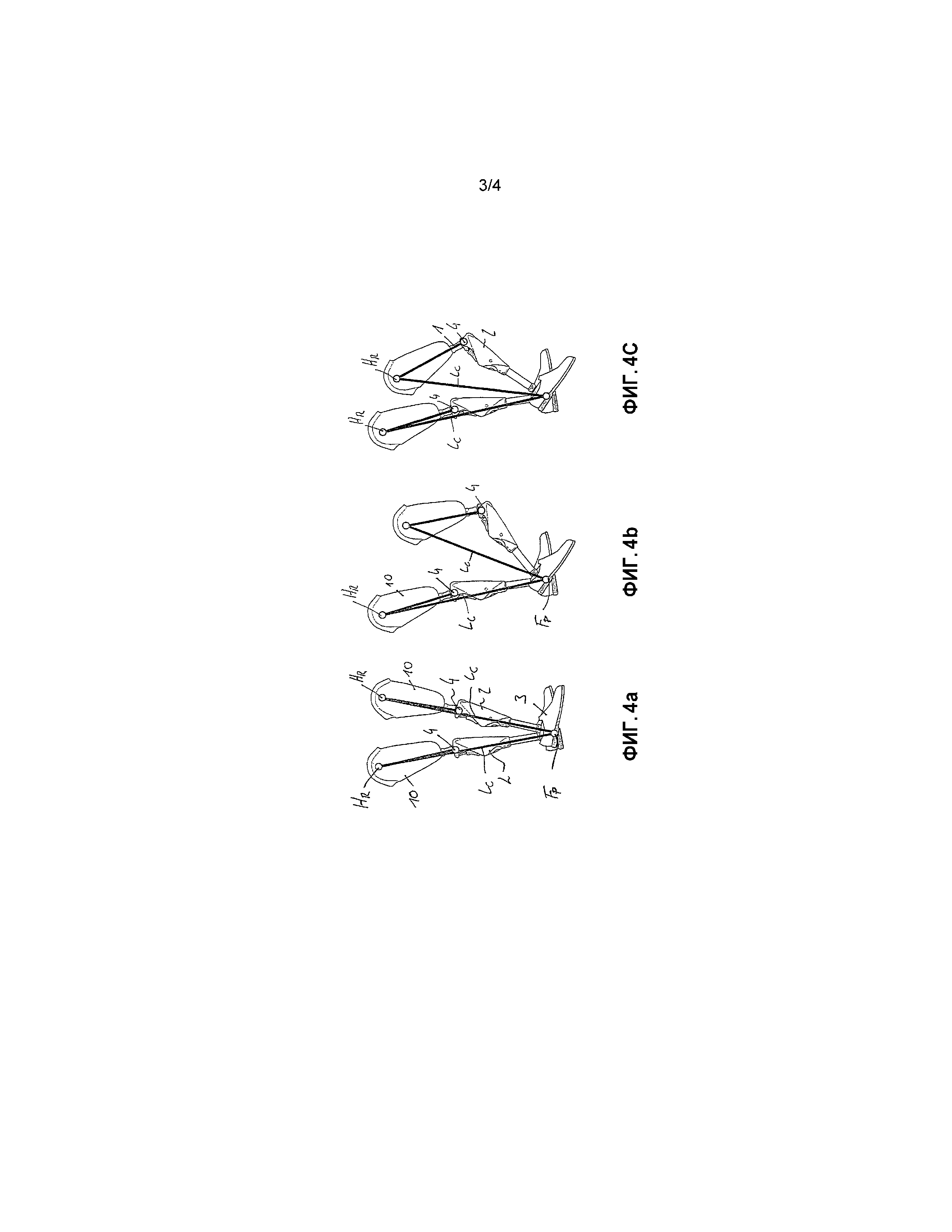
фиг. с 4a по 4c - изображения различных ситуаций во время ходьбы; и
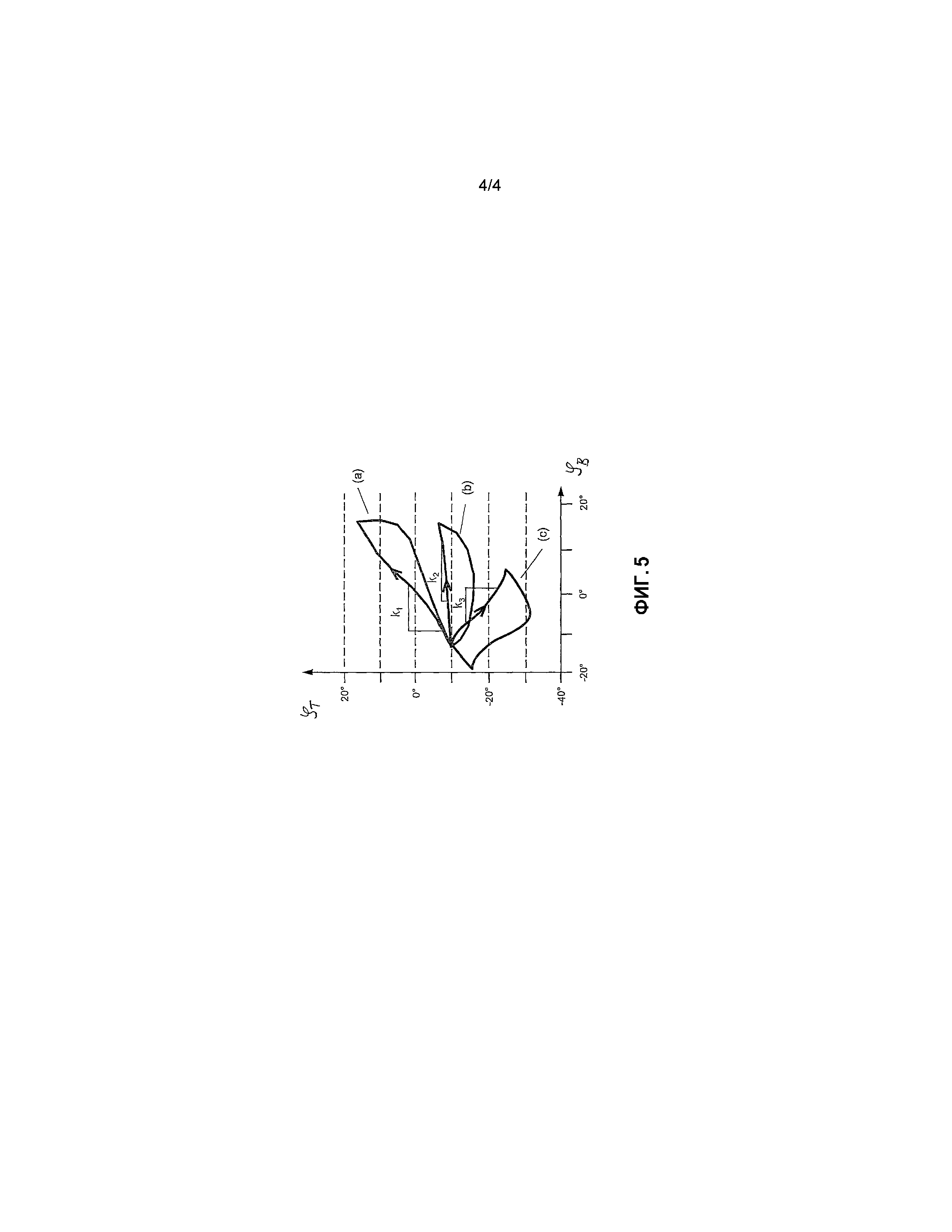
фиг. 5 - различные изображения угла бедра с изменением ориентации ноги.
На фиг. 1 показан на схематичном изображении протез ноги с верхней частью 1, на которой закреплена бедренная гильза 10 для приема культи бедра. На верхней части 1 расположена с возможностью поворота нижняя часть 2 в виде части голени. Нижняя часть 2 установлена на верхней части 1 с возможностью поворота вокруг оси 4 поворота. Нижняя часть 2 имеет трубу 5 голени, на дистальном конце которой закреплена стопа 3 протеза, в которой может быть размещено устройство для определения действующего на трубу 5 голени осевого усилия, а также момента лодыжки, который действует вокруг места закрепления стопы 3 протеза на трубе 5 голени.
В или на нижней части 2 расположено устройство 6 сопротивления, которое может быть выполнено, например, в виде амортизатора или привода, и которое поддерживается между верхней частью 1 и нижней частью 2, для того чтобы предоставлять регулируемое сопротивление разгибания и сопротивление сгибания. С устройством 6 сопротивления согласовано регулировочное устройство 7, например, двигатель, магнит или другой привод, при помощи которого соответствующее сопротивление R внутри блока 6 сопротивления может изменяться. Если блок 6 сопротивления выполнен в виде гидравлического амортизатора или пневматического амортизатора, то регулировочным устройством 7 соответствующее поперечное сечение потока перепускного канала может увеличиваться или уменьшаться. Также регулировочным устройством 7 аэрогидродинамическое сопротивление может изменяться другим образом. Это может происходить, например, посредством открытия или закрытия клапанов или посредством изменений вязкости или магнитореологических свойств. Если блок сопротивления выполнено в виде электродвигателя в режиме генератора, то посредством изменения электрического сопротивления может устанавливаться увеличение или уменьшение соответствующих сопротивлений против сгибания или разгибания. Блок сопротивления может быть также выполнен в виде механического сопротивления против сгибания или разгибания в виде фрикционного тормоза или в виде элемента из эластомера с переменным сопротивлением деформированию или в виде магнитореологического амортизатора.
Для того чтобы была возможность активировать или деактивировать регулировочное устройство 7, с нижней частью 2 согласовано, в частности установлено в оболочке голени, устройство 8 управления, при помощи которого на регулировочное устройство 7 выдается соответствующий сигнал активации или деактивации. Регулировочное устройство 7 активируется или деактивируется на основе данных датчиков, данные датчиков выдаются одним или несколькими датчиками 9, которые расположены на искусственном коленном суставе. Ими могут быть датчики угла, инерциальные датчики угла, датчики ускорения и/или датчики усилия. Датчики 9 соединены с устройством 8 управления, например, кабелями или при помощи беспроводного передающего устройства. В изображенном примере осуществления датчик 9 выполнен в частности в виде датчика угла колена или инерциального датчика угла. Датчики могут быть расположены на бедренной гильзе 10, верхней части 1, нижней части 2, трубе 5 голени или стопе 3 протеза. У ортезов датчики закреплены на в каждом случае соответствующих шинах, элементах суставов или элементах для стоп, датчики 9 могут быть также закреплены на самих конечностях.
Датчиками 9 контролируется весь цикл шага от касания пяткой (Heel Strike) через отрыв пальцев стопы от земли до нового последующего касания пяткой HS, таким образом также вся фаза маха с разгибанием фазы маха и сгибанием фазы маха.
На фиг. 2 показан на виде сбоку в согнутом положении коленный сустав протеза с бедренной гильзой 10, верхней частью 1, присоединенной с возможностью поворота вокруг оси 4 колена нижней частью 2 с расположенным в ней блоком 6 сопротивления, дистальной трубой 5 голени и закрепленной на ней стопой протеза. Хорда LC ноги распространяется между точкой FP стопы и точкой HR поворота тазобедренного сустава. Хорда LC ноги - это соединение между точкой HR поворота тазобедренного сустава и точкой FP стопы, при помощи ориентации хорды LC ноги можно делать выводы о выполненном в каждом случае движении, в частности могут отличаться друг от друга различные движения или ситуации во время ходьбы. Точка FP стопы может находиться посередине стопы, альтернативно точка FP стопы задается как мгновенный полюс полюсного движения, как ось поворота голеностопного сустава или как продолжение продольного распространения нижней части 2 до уровня подошвы стопы. В качестве параметра положения хорды LC ноги отмечен угол ϕB хорды ноги, который определен как угол между хордой LC ноги и вертикалью V. В изображенном положении устройства протеза верхняя часть 1 согнута под углом относительно нижней части 2, хорда LC ноги отклонена таким образом назад. Из этого следует, что также угол ϕT бедра прилегает к вертикали V. Угол ϕT бедра увеличивается относительно вертикали V, если нижняя часть 2, например, удерживается в вертикальном положении, а верхняя часть 1 поворачивается в изображенном примере осуществления против часовой стрелки вокруг оси 4 поворота. Базовым параметром для угла ϕT бедра является соединительная линия между точкой HR поворота тазобедренного сустава и осью 4 колена, удаление обеих точек друг от друга вдоль этой соединительной линии определяет одновременно длину LT бедра.
На фиг. 3 в дополнение к величинам согласно фиг. 2 нанесен угол ϕK колена, который является углом между сегментом бедра, представленным соединительной линией между осью 4 колена и точкой HR поворота тазобедренного сустава, и продольным распространением нижней части 2. Угол ϕK колена равен 0, если устройство протеза находится в максимально разогнутом положении. Это означает, что продольное распространение нижней части 2 находится на одной прямой с продольным распространением верхней части 1, то есть соединение между осью 4 колена и точкой HR поворота тазобедренного сустава находится на одной прямой с соединительной линией между осью 4 колена и точкой FP стопы, если точка FP стопы расположена на оси продольного распространения трубы 5 голени.
Длина LS голени определяется расстоянием между осью 4 колена и точкой FP стопы. Угол ϕS голени является углом между вертикалью V и соединительной линией между точкой FP стопы и осью 4 колена. В изображенном примере осуществления с согнутым коленным суставом протеза на угол ϕK угол ϕS голени положительно отклонен в направлении ходьбы вперед, угол ϕT бедра ориентирован в обратном направлении относительно вертикали, хорда LC ноги отклонена назад на угол ϕB. Длина LB хорды LC ноги определена расстоянием между точкой HR поворота тазобедренного сустава и точкой FP стопы.
Длину LB хорды LC ноги можно рассчитывать из известных длин LT и LS сегментов в сочетании с углом колена. Наряду с инерциальными датчиками 9 углов, которые могут быть расположены на нижней части 2 или верхней части 1 и соответственно на бедренной гильзе 10 или трубе 5 голени, ориентацию или угол ϕB хорды ноги можно также определять из комбинации угла ϕS голени с установленным углом ϕK колена, причем для этого имеется формула:
ϕB=ϕS+d×ϕK,
где d находится между 0,4 и 0,6, в частности составляет 0,5.
Благодаря знанию длины LB и ориентации ϕB хорды LC ноги и при необходимости производных по времени этих величин возможно отслеживать движение перекатывания на фазе остановки вне зависимости от сгибания или разгибания фазы остановки и получать информацию о ходе выполнения движения. Благодаря изменению ориентации хорды ноги или угла ϕB хорды ноги может отслеживаться ход выполнения движения как на фазе остановки, так и на фазе маха, так что эта величина посредством адаптации настроек амортизации может привлекаться к управлению поведением фазы остановки и/или поведением фазы маха.
Угол ϕT бедра, а также угол ϕS голени, которые могут обозначаться также как угол сегмента, могут измеряться инерциальными датчиками, которые находятся на соответствующем сегменте. Альтернативно осуществляется расчет при помощи лишь одного инерциального датчика на в каждом случае незатронутом сегменте и угла ϕK колена, который определяется датчиком угла колена.
На фиг. 4a изображены два фрагмента положения ноги для ходьбы по горизонтальной плоскости. Левое изображение показывает устройство протеза вскоре после контакта пяткой, длина LB хорды LC ноги практически максимальна, так как необозначенный угол ϕB хорды ноги практически соответствует углу ϕT бедра. В дальнейшем ходе выполнения шага происходит прогрессия вперед, устройство протеза поворачивается в целом вперед, хорда LC ноги поворачивается вокруг точки FP стопы, которая может находиться также на голеностопном суставе, вперед, так что хорда LC ноги расположена перед вертикалью. На фиг. 4a можно увидеть, что в течение большого времени прогрессии вперед при ходьбе по плоскости бедро или бедренная гильза 10 смещается вперед вместе с хордой LC ноги при почти разогнутом коленном суставе, изменение угла колена не происходит.
На фиг. 4b показана ходьба по направленной вниз наклонной поверхности. На левом изображении можно увидеть увеличенное сгибание в коленном суставе протеза, бедренная гильза 10 повернута вокруг оси 4 колена, ориентация хорды LC ноги примерно соответствует ориентации на фазе касания земли при ходьбе по горизонтальной плоскости.
Дальнейший ход движения вниз по наклонной поверхности показан на правом изображении фиг. 4b. Равным образом происходит движение перекатывания вокруг точки FP стопы, хорда LC ноги поворачивается вокруг точки FP стопы вперед, угол ϕT бедра остается ввиду увеличенного сгибания вокруг оси 4 колена в практически неизменном положении, то есть ориентация бедра или бедренной гильзы 10 в пространстве не изменяется или изменяется лишь в незначительной степени, в то время как хорда LC ноги выполняет поворот вперед.
Третья ситуация во время ходьбы изображена на фиг. 4c, а именно спуск по лестнице. Ориентация отдельных компонентов устройства протеза соответствует в начальном положении, которое показано на левом изображении, ходьбе по наклонной поверхности вниз. Хорда LC ноги наклонена назад, то есть отклонена против часовой стрелки относительно вертикали назад. В дальнейшем ходе выполнения попеременного спуска по лестнице устройство протеза сгибается, происходит поворот верхней части 1 относительно нижней части 2, угол ϕK колена увеличивается, так же уменьшается длина LB хорды LC ноги. Ориентация хорды LC ноги изменяется меньше, чем при ходьбе по горизонтальной поверхности или по наклонной поверхности вниз, то есть поворот хорды LC ноги вперед происходит лишь в меньшей степени, угол ϕB хорды ноги к вертикали таким образом меньше, чем при ходьбе по горизонтальной поверхности или по наклонной поверхности вниз.
В ситуациях ходьбы согласно фиг. с 4a по 4с происходит прогрессия вперед, нога перекатывается таким образом вперед. Подходящим параметром или вспомогательной переменной для дифференциации и распознавания соответствующей ситуации во время ходьбы является частное между изменением угла ϕT бедра или угла ϕS голени и изменением ориентации ноги или угла ϕB хорды ноги. Равным образом подходят и предусмотрены в качестве параметра производные по времени, то есть частное изменения угловых скоростей хорды LC ноги и бедра или голени.
На фиг. 5 нанесены изменения соответствующих углов, на кривой a показано изменение углов для ходьбы по горизонтальной плоскости, на кривой b изменение угла хорды ноги и угла бедра для ходьбы по наклонной поверхности вниз, на кривой c изменение углов для спуска по лестнице.
Видно, что все кривые a, b, c имеют различный ход, в частности различен уклон k для соответствующего хода кривой. Уклон k может определяться как разностное частное, для этого имеется формула:
k=(ϕT1-ϕT0)/(ϕB1-ϕB0).
Для ходьбы по горизонтальной плоскости уклон k1 существенно больше, чем уклон k2 для ходьбы по наклонной поверхности вниз. В то время как при ходьбе по горизонтальной плоскости согласно кривой a изменение угла ϕT бедра по существу ориентируется на изменение угла ϕB хорды ноги - уклон равен примерно 1, угол ϕT бедра при ходьбе по наклонной поверхности вниз практически неизменен, так что устанавливается существенно меньший уклон k2 для ходьбы по наклонной поверхности вниз. При спуске по лестнице угол ϕB хорды ноги уменьшается существенно меньше, чем угол ϕT бедра, так что для уклона k3 при спуске по лестнице устанавливается отрицательное значение.
В зависимости от обнаруженного отношения (частного) или соответствующего уклона k1, k2, k3 может осуществляться адаптация сопротивлений, стандартная настройка для ходьбы по плоскости может при обнаружении ходьбы по наклонной поверхности вниз изменяться согласно ходу кривой b таким образом, что имеется подпружинивание и тем самым уменьшенное сгибание при соответствующем угле ϕB хорды ноги. Если обнаруживается отрицательный уклон k3 согласно кривой c на фиг. 5, то может предполагаться спуск по лестнице. Медленное оседание или предотвращение полной блокировки устройства протеза должно избегаться, для того чтобы исключать эффект "катапульты".
Соответственно характеристические фазовые диаграммы получаются, если вместо углов наносятся угловые скорости или угловые ускорения хорды ноги и бедра или голени.
Благодаря соответствующему изобретению способу не должны измеряться или анализироваться усилия или ходы кривых усилий, для того чтобы регистрировать различие ситуаций во время ходьбы или ход выполнения их движения. Принципиально только углы измеряются, рассчитываются или определяются и берутся за основу изменения настройки амортизации.
Протезный захватный модуль
Способ и устройство для управления ортезом или протезом коленного сустава
Способ и устройство для управления ортезом или протезом сустава
Шарнирное устройство
Способ и устройство для управления ортезом или протезом сустава нижней конечности
Способ управления искусственным ортезным или протезным коленным суставом
Искусственный палец
Удерживающее гильзу протеза устройство и система из гильзы протеза и удерживающего гильзу протеза устройства
Внутренний корпус протеза
Способ управления изменением амортизации
Способ управления искусственным ортезным или протезным коленным суставом
Способ управления изменением амортизации
Способ управления амортизацией фазы остановки искусственного коленного сустава

