Результат интеллектуальной деятельности: СИСТЕМА ВЗАИМОДЕЙСТВИЯ МЕЖДУ АГЕНТАМИ, СПОСОБ ВЗАИМОДЕЙСТВИЯ МЕЖДУ АГЕНТАМИ И НЕПЕРЕХОДНАЯ ЗАПОМИНАЮЩАЯ СРЕДА
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе взаимодействия агентов, способу взаимодействия агентов и носителю для хранения информации.
2. Описание предшествующего уровня техники
[0002] В публикации патентной заявки Японии 2003-016584 (JP 2003-016584 А) раскрыто информационное оконечное устройство, которое включает в себя блок сбора информации хост-транспортного средства, для сбора информации хост-транспортного средства, включая информацию о местоположении и информацию о скорости, блок передачи для передачи информации о хост-транспортном средстве другому транспортному средству, когда выполнено предварительно заданное условие передачи, и блок голосового управления для выполнения голосового управления, касающегося другого транспортного средства на основе информации о местоположении и информации о скорости другого транспортного средства, которые получены от другого транспортного средства. Блок голосового управления в информационном оконечном устройстве уведомляет водителя информацией о другом транспортном средстве, когда расстояние между транспортными средствами -между хост-транспортным средством и другим транспортным средством превышает предварительно заданное расстояние.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Согласно техническим средствам, описанным в публикации патентной заявки Японии JP 2003-016584 А, информация о местоположении другого транспортного средства получается, и водитель уведомляется информацией о местоположении другого транспортного средства, таким образом, чтобы хост-транспортное средство не удалялось от другого транспортного средства. Однако эти технические средства не предполагаются для помощи хост-транспортному средству при управлении во взаимодействии с другим транспортным средством, например, когда хост-транспортное средство обгоняет другое транспортное средство или, когда хост-транспортное средство въезжает на полосу движения, по которой движется другое транспортное средство.
[0004] Настоящее изобретение обеспечивает технические средства для уведомления водителя об информации, принятой посредством взаимодействия между агентами, для оказания помощи водителю при вождении.
[0005] Первый объект изобретения предусматривает систему взаимодействия агентов, содержащую: первого агента, выполненного с возможностью получения информации о показателе вождения первого водителя в первом транспортном средстве; и второго агента, выполненного с возможностью уведомления второго водителя во втором транспортном средстве об информации помощи при вождении, выводимой на основе информации о показателе вождения первого водителя, принятой первым агентом.
[0006] Согласно первому объекту, система взаимодействия агентов позволяет второму водителю, который уведомляется об информации помощи при вождении, выводимой на основе информации о показателе вождения первого водителя, управлять на основе этой информации помощи при вождении, тем самым помогая второму водителю в управлении.
[0007] Согласно первому объекту, первый агент может быть выполнен с возможностью формирования информации о показателе вождения первого водителя на основе речевого сигнала первого водителя.
[0008] Согласно первому объекту, второй агент может быть выполнен с возможностью уведомления второго водителя об информации помощи при вождении, выводимой на основании графика движения первого водителя, причем график движения первого водителя оценивается по информации о показателе вождения первого водителя.
[0009] Согласно первому объекту, первый агент может быть выполнен с возможностью идентификации информации о предстоящем управлении первого водителя, а второй агент может быть выполнен с возможностью уведомления второго водителя об информации помощи при вождении, выводимой на основе показателя вождения первого водителя, идентифицированного первым агентом, и информации о предстоящем управлении первого водителя.
[0010] Согласно первому объекту, информация о показателе вождения первого водителя может включать в себя несколько типов параметров, а второй агент может быть выполнен с возможностью выведения информации помощи при вождении на основе, по меньшей мере, одного из нескольких типов параметров и уведомлять второго водителя об информации помощи при вождении.
[0011] Согласно первому объекту, информация о показателе вождения первого водителя может быть обновлена за счет действия первого водителя, реагирующего на информацию помощи при вождении, предоставленную от первого агента.
[0012] Второй объект изобретения предусматривает способ взаимодействия агентов. Способ взаимодействия агентов содержит: взаимодействие между первым агентом, установленным в первом транспортном средстве, и вторым агентом, установленным во втором транспортном средстве; получение первым агентом информации о показателе вождения первого водителя в первом транспортном средстве; и уведомление вторым агентом второго водителя во втором транспортном средстве об информации помощи при вождении, выводимой на основе информации о показателе вождения первого водителя.
[0013] Согласно второму объекту, способ взаимодействия агентов позволяет второму водителю, которого уведомляют об информации помощи при вождении, выводимой на основе информации о показателе вождения первого водителя, осуществлять управление на основе этой информации помощи при вождении, тем самым помогая второму водителю при вождении.
[0014] Третий объект изобретения предусматривает носитель для хранения информации. Носитель для хранения информации сохраняет информацию о показателе вождения первого водителя в первом транспортном средстве, при этом информация получена первым агентом, установленным в первом транспортном средстве, в виде нескольких типов параметров, и используется при обработке, при которой второй агент во втором транспортном средстве уведомляет второго водителя во втором транспортном средстве об информации помощи при вождении, выводимой на основе информации о показателе вождения первого водителя.
[0015] Четвертый объект изобретения предусматривает способ взаимодействия агентов. Способ взаимодействия агентов включает в себя: взаимодействие между первым агентом, установленным в первом транспортном средстве, и вторым агентом, установленным во втором транспортном средстве; получение первым агентом информации о показателе вождения первого водителя в первом транспортном средстве; и отправка информации о показателе вождения первого водителя второму агенту таким образом, что второй агент может принимать информацию.
[0016] Пятый объект изобретения предусматривает способ взаимодействия агентов. Способ взаимодействия агентов включает в себя: взаимодействие между первым агентом, установленным в первом транспортном средстве, и вторым агентом, установленным во втором транспортном средстве; получение информации о показателе вождения первого водителя в первом транспортном средстве, полученном первым агентом; и уведомление вторым агентом второго водителя во втором транспортном средстве об информации помощи при вождении, выводимой на основе принятой информации о показателе вождения первого водителя.
[0017] Вышеупомянутые объекты обеспечивают технические средства для уведомления водителя об информации посредством взаимодействия между агентами, для содействия водителю при вождении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Признаки, преимущества, а также техническая и промышленная значимость иллюстративных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и где:
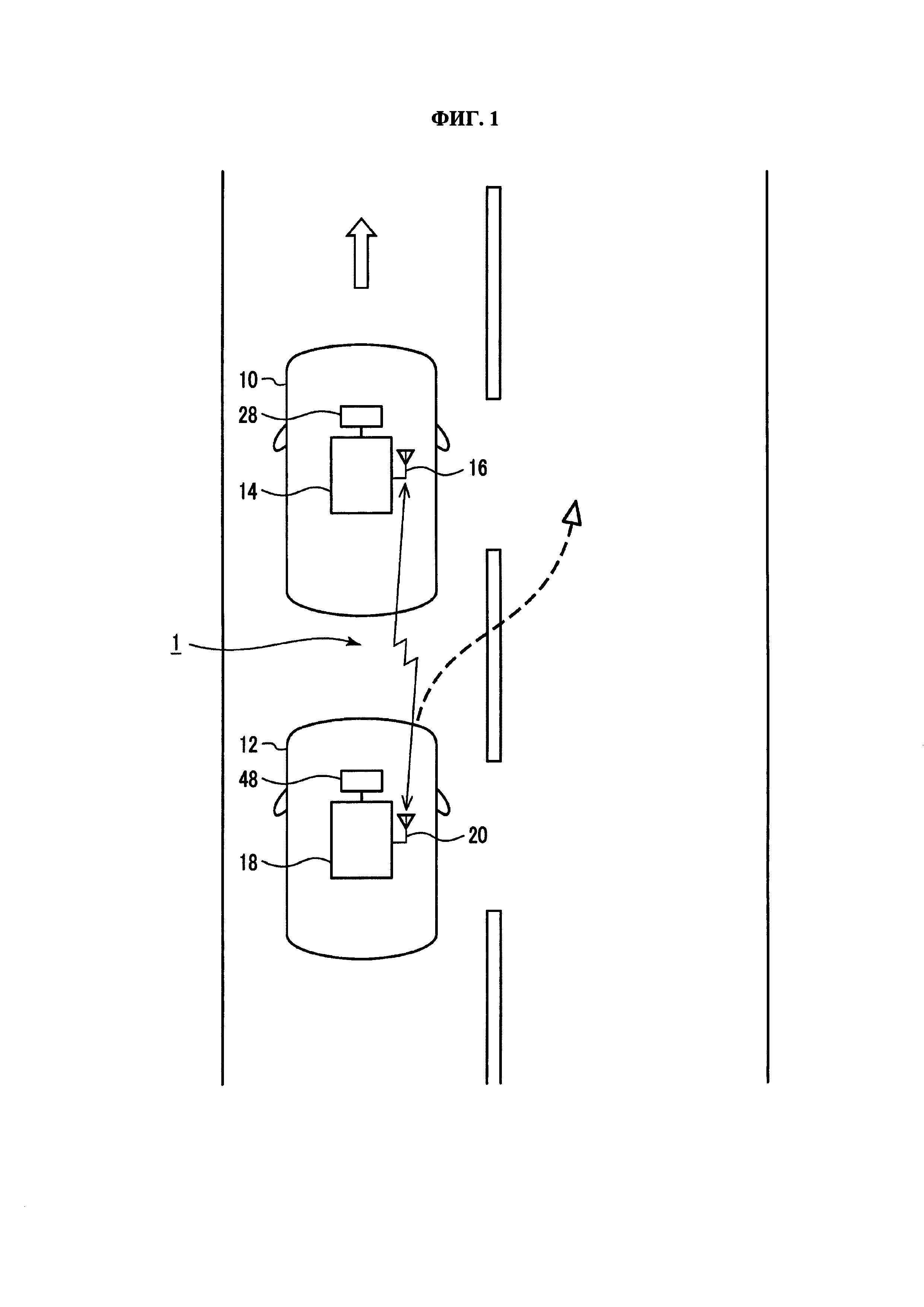
Фиг. 1 представляет собой схему, иллюстрирующую систему взаимодействия агентов;
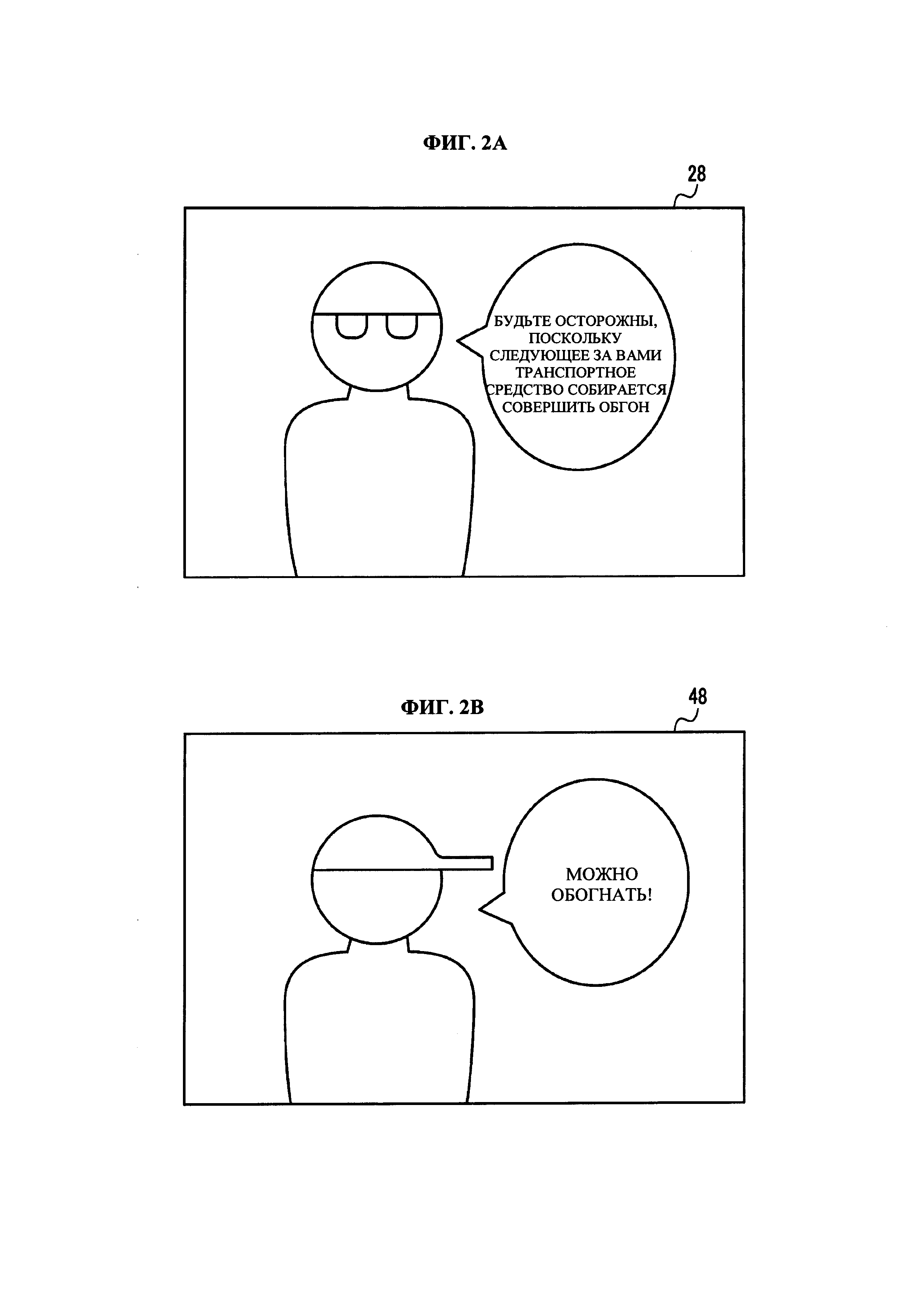
Фиг. 2А представляет собой схему, иллюстрирующую пример информации, которую агент одного транспортного средства посылает водителю другого транспортного средства, когда другое транспортное средство обгоняет первое транспортное средство;
Фиг. 2В представляет собой схему, иллюстрирующую пример информации, которую агент одного транспортного средства посылает водителю другого транспортного средства, когда одно транспортное средство обгоняет другое транспортное средство;
Фиг. 3 представляет собой схему, иллюстрирующую функциональную конфигурацию системы взаимодействия агентов;
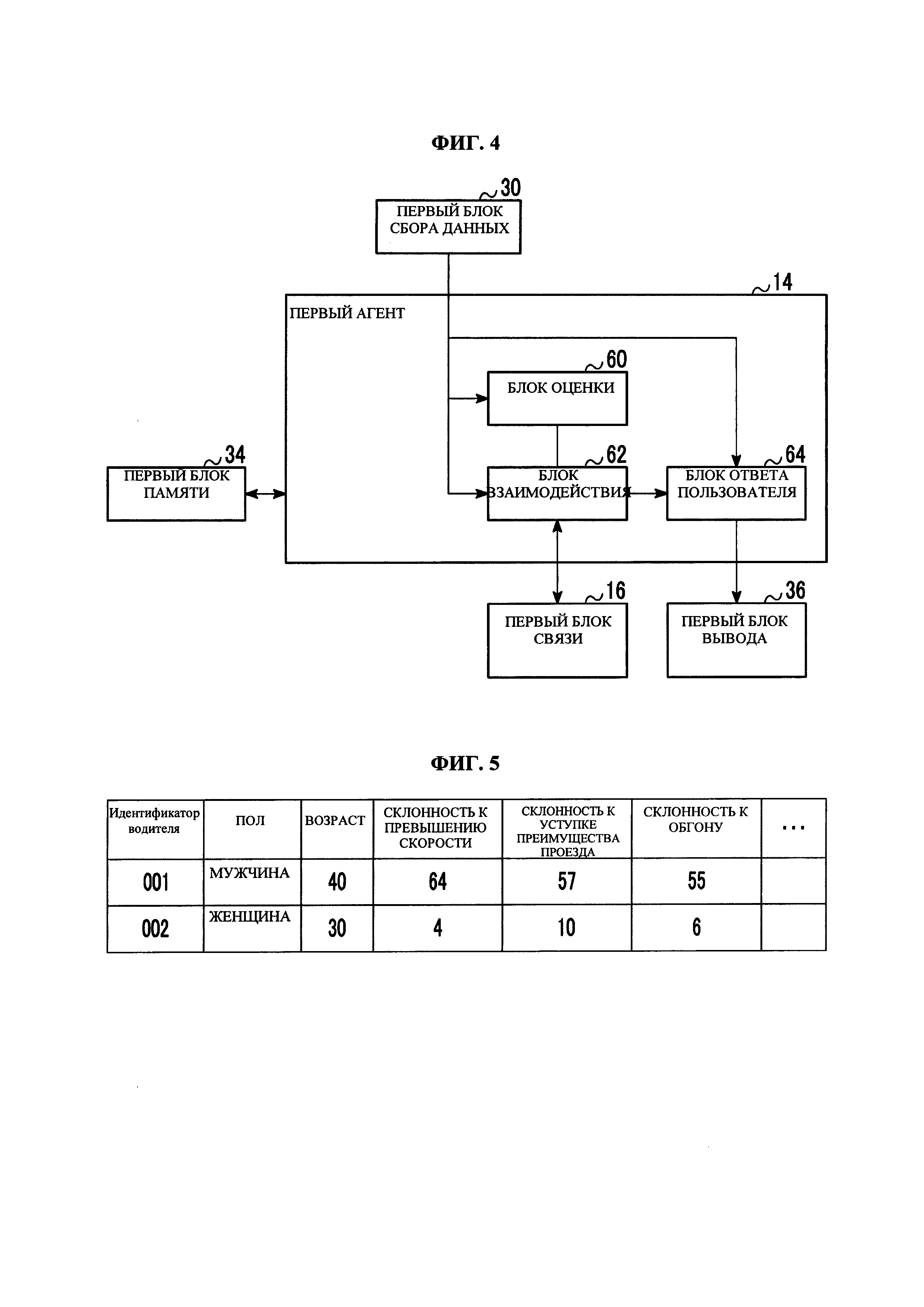
Фиг. 4 представляет собой схему, иллюстрирующую функциональную конфигурацию первого агента;
Фиг. 5 представляет собой схему, иллюстрирующую информацию о показателях вождения водителей;
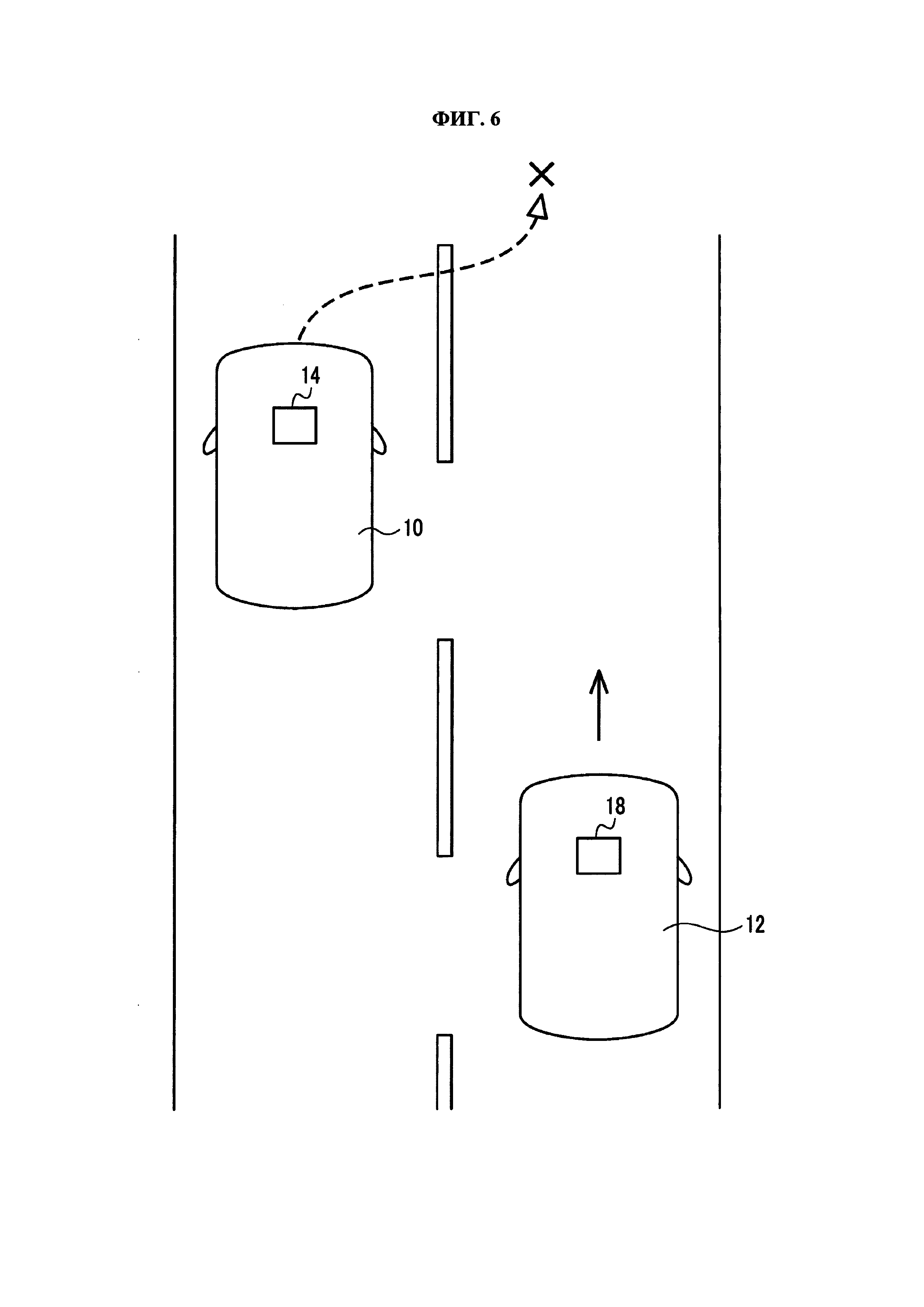
Фиг. 6 представляет собой схему, иллюстрирующую пример помощи при вождении на основе информации о показателях вождения водителей, полученной путем взаимодействия между агентами;
Фиг. 7 представляет собой схему, иллюстрирующую пример помощи при вождении на основе информации о предстоящем управлении водителей, полученной путем взаимодействия между агентами; и
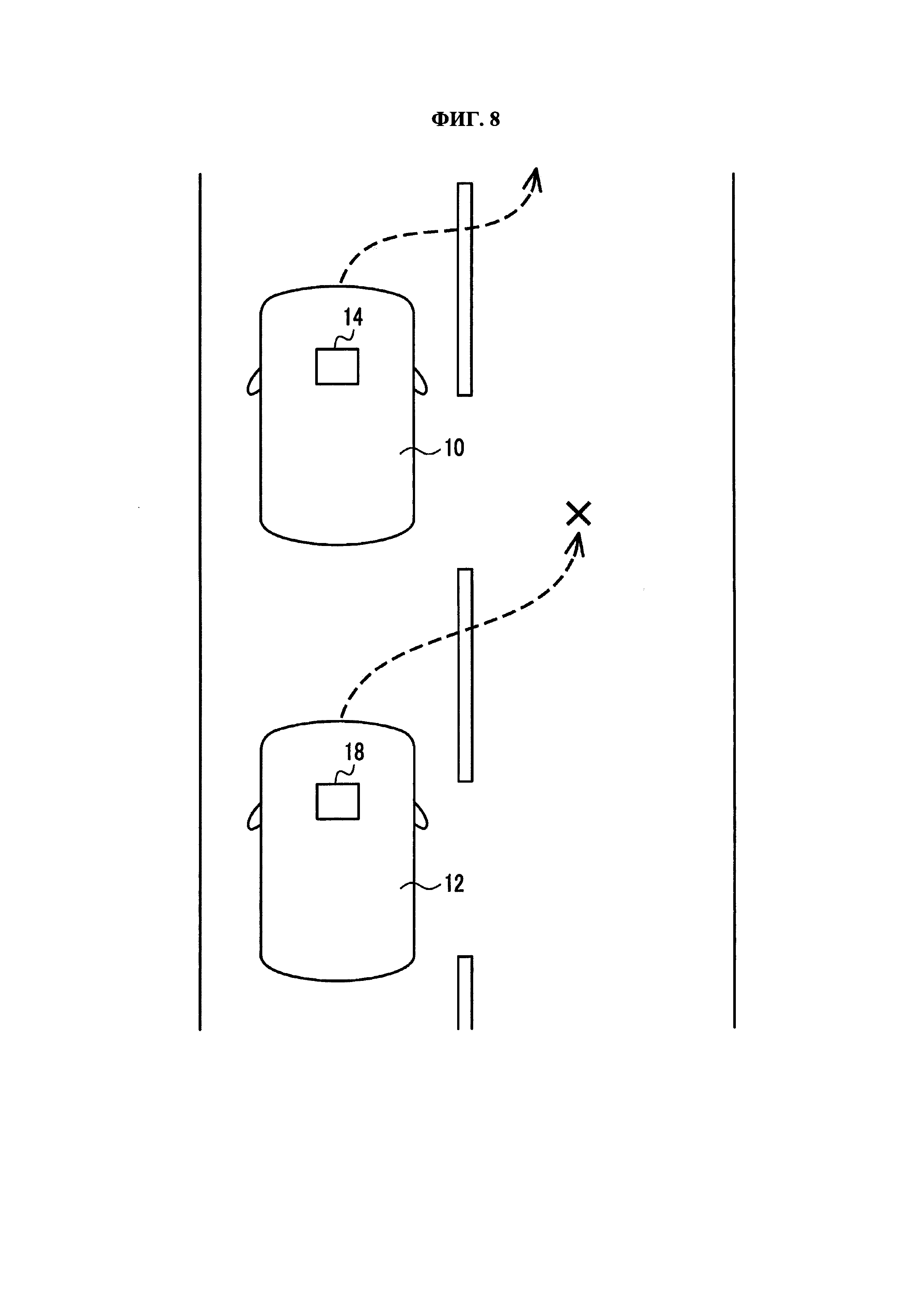
Фиг. 8 представляет собой схему, иллюстрирующую пример помощи при вождении на основе информации о показателях вождения водителей, полученной путем взаимодействия между агентами, и информации о предстоящем управлении.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
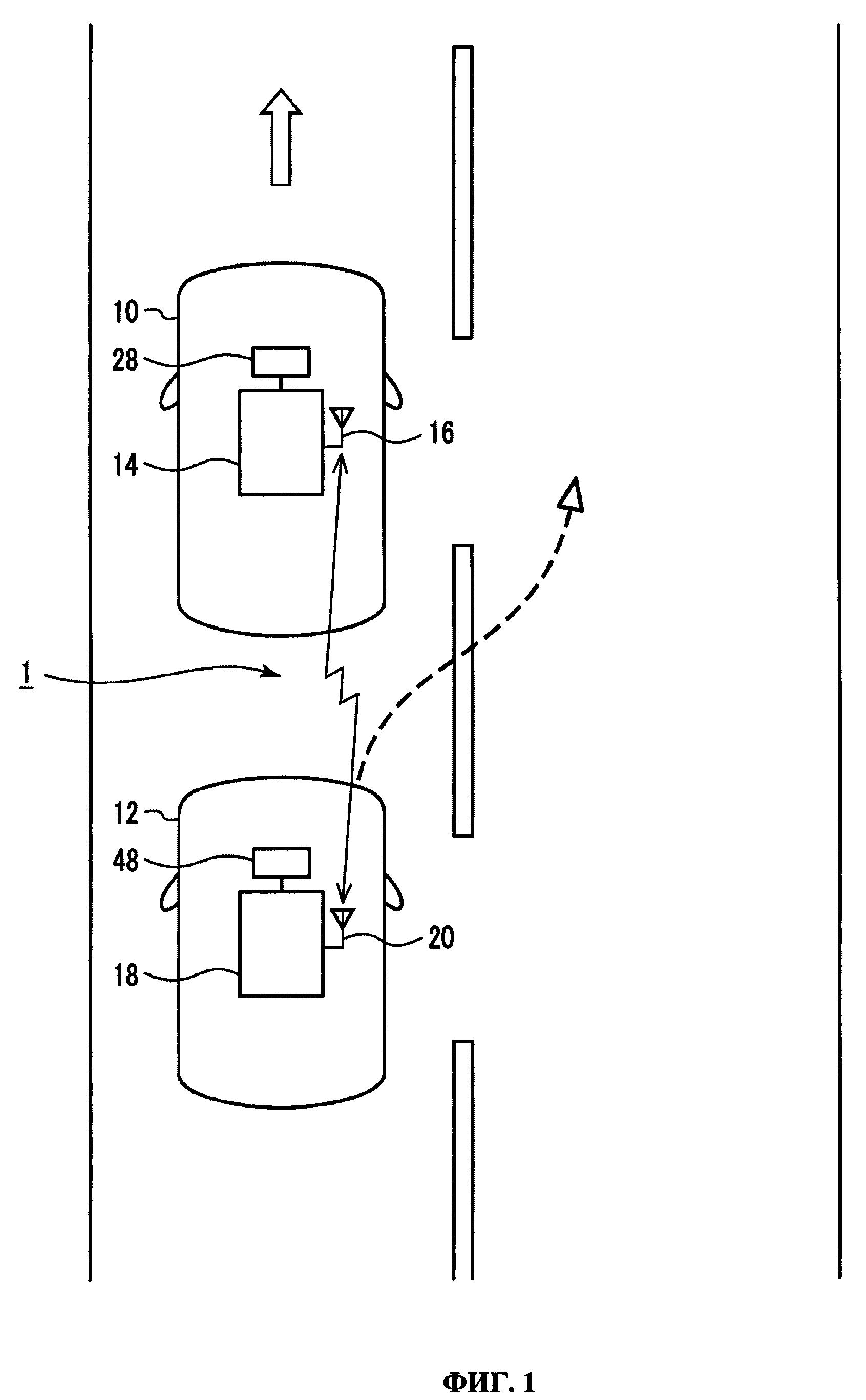
[0019] Фиг. 1 представляет собой схему, иллюстрирующую систему 1 взаимодействия между агентами. На фиг. 2А и фиг. 2В представлены схемы, иллюстрирующие пример информации, которую каждый агент передает водителю, когда транспортное средство обгоняет другое транспортное средство.
[0020] В системе 1 взаимодействия между агентами, первый агент 14, установленный на первом транспортном средстве 10 и второй агент 18, установленный на втором транспортном средстве 12 взаимодействуют друг с другом для обмена информацией об управлении каждым транспортным средством через первый блок 16 связи и второй блок 20 связи. Обмен информацией, таким образом, используется для обеспечения помощи при вождении. Например, первый агент 14 получает график движения и предпочтения вождения второго транспортного средства 12, находящегося вблизи первого транспортного средства 10, чтобы уведомить первого водителя в первом транспортном средстве 10 информацией помощи при вождении, полезной для первого водителя. Аналогичным образом, второй агент 18 получает график движения и предпочтения вождения первого транспортного средства 10, чтобы уведомить второго водителя во втором транспортном средстве 12 информацией помощи при вождении, полезной для второго водителя.
[0021] Первый агент 14 и второй агент 18 обмениваются информацией с водителями интерактивно в большинстве случаев, чтобы предоставлять информацию о перемещении посредством голоса и/или изображения для помощи водителям при вождении. Первый агент 14 и второй агент 18 могут взаимодействовать с водителем не только о движении, но и о повседневных вещах, не связанных с движением.
[0022] Первый блок 16 связи и второй блок 20 связи обмениваются информацией посредством связи между транспортными средствами с использованием инфракрасного лазера или радиоволны и/или посредством связи через релейное устройство, например, серверное устройство. Идентификатор транспортного средства присваивается каждой части информации, отправленной первым блоком 16 связи и вторым блоком 20 связи.
[0023] В ситуации, показанной на фиг. 1, второй водитель во втором транспортном средстве 12 говорит, что второе транспортное средство 12 собирается обогнать первое транспортное средство 10. В результате получения этого речевого сигнала, второй агент 18 отправляет информацию о предстоящем управлении, которая указывает на то, что второе транспортное средство 12 собирается обогнать первое транспортное средство 10, первому агенту 14 первого транспортного средства 10.
[0024] Первый агент 14 получает график движения второго транспортного средства 12 и, как показано на фиг. 2А, уведомляет первого водителя информацией помощи при вождении, которая предупреждает, что второе транспортное средство 12 собирается обогнать первое транспортное средство 10, используя первое передающее устройство 28 посредством голоса и изображения. Когда первый водитель говорит в ответ на уведомление от первого агента 14, что обгон вторым транспортным средством 12 разрешен, первый агент 14 отправляет информацию о предстоящем управлении первого водителя, которая указывает на то, что обгон разрешен, второму агенту 18. После получения этой информации второй агент 18 уведомляет второго водителя об информации помощи при вождении, которая указывает на то, что второе транспортное средство 12 может обогнать первое транспортное средство 10, используя второе передающее устройство 48 посредством голоса и изображения, как показано на фиг. 2В.
[0025] Согласно другому способу, первый агент 14 получает информацию, которая указывает, что второе транспортное средство 12 собирается обогнать первое транспортное средство 10, от второго агента 18 и, в ответ на эту информацию, отправляет информацию, указывающую на показатель вождения первого водителя для второго агента 18. На основании информации, указывающей на показатель вождения первого водителя, второй агент 18 определяет, возможен ли плавный обгон. Если определено, что плавный обгон возможен, второй агент 18 уведомляет второго водителя об информации помощи при вождении, которая указывает на то, что второе транспортное средство 12 может обогнать первое транспортное средство 10, используя второе передающее устройство 48 посредством голоса и изображения, как показано на фиг. 2В.
[0026] Согласно любому из способов, описанных выше, первый водитель получает уведомление об информации помощи при вождении, указывающей на график движения второго транспортного средства 12, и, основываясь на этом уведомлении, может двигаться с предосторожностью, принимая меры, чтобы не менять полосу и не увеличивать скорость транспортного средства. Аналогичным образом, второй водитель получает уведомление об информации помощи при вождении, определяемую на основе предстоящего управления первого транспортного средства 10, и на основе этого уведомления может плавно обогнать первое транспортное средство 10. Таким образом, взаимодействие между агентами позволяет оказать помощь водителям при вождении.
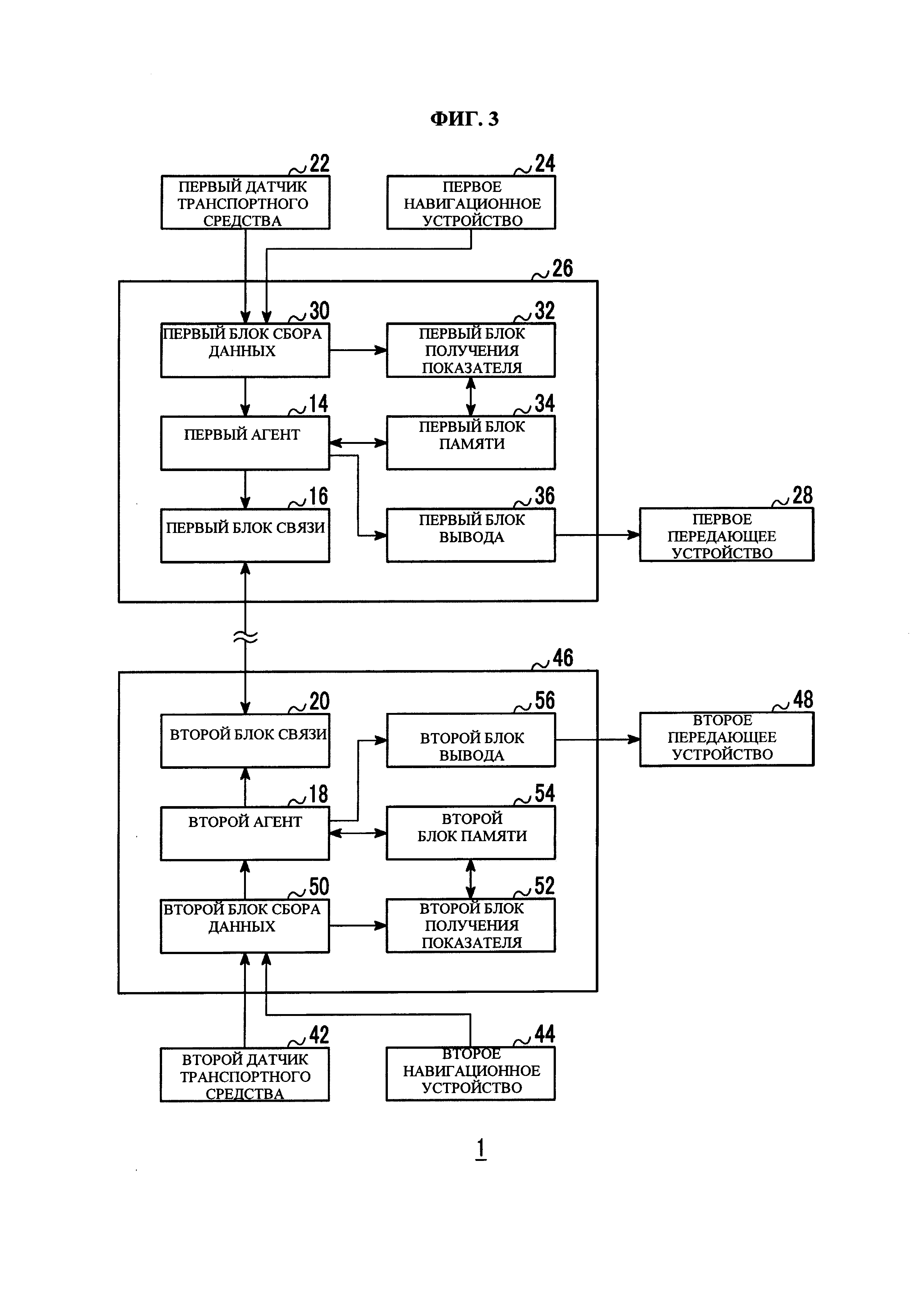
[0027] Фиг. 3 представляет собой схему, показывающую функциональную конфигурацию системы 1 взаимодействия агентов. Компоненты, показанные на фиг. 3 в виде функциональных блоков, которые выполняют различные виды обработки, каждый может быть реализован с помощью микросхемы, запоминающего устройства и другой БИС на основе аппаратного обеспечения, а также программы, загруженной в устройство памяти на основе программного обеспечения. Поэтому специалистам в данной области техники понятно, что эти функциональные блоки могут быть реализованы в различных формах только с помощью аппаратного оборудования, только с помощью программного обеспечения или сочетания аппаратного и программного обеспечения. То есть реализация этих функциональных блоков не должна ограничиваться одним из них.
[0028] Первое транспортное средство 10 оснащено первым датчиком 22 транспортного средства, первым навигационным устройством 24, первым блоком 26 управления и первым передающим устройством 28. Первый датчик 22 транспортного средства включает в себя различные датчики, размещенные в первом транспортном средстве 10, такие как датчик для отслеживания окружающего пространства, датчик для определения состояния движения и микрофон для восприятия речевого сигнала от водителя.
[0029] Датчик для отслеживания окружающего пространства содержит камеру для фиксации близлежащих зон транспортного средства, а также радар и лазер для распознавания объекта вблизи транспортного средства. Основываясь на результатах распознавания этих датчиков, можно получить информацию о местоположении другого транспортного средства вблизи хост-транспортного средства. Датчик для определения состояния движения содержит датчик для определения скорости транспортного средства, датчик для определения ускорения, датчик для определения величины работы рулевого управления и датчик для определения величины работы торможения. Основываясь на результатах распознавания этих датчиков, можно получить результат движения транспортного средства для учета предпочтений вождения водителя. Информация, полученная первым датчиком 22 транспортного средства, посылается в первый блок 26 управления.
[0030] Первое навигационное устройство 24 получает информацию, указывающую на место назначения, которое задано водителем, и информацию о местоположении первого транспортного средства 10, и отправляет информацию о месте назначения и информацию о местоположении в первый блок 26 управления. Первое передающее устройство 28, которое включает в себя дисплей и динамик, отправляет информацию водителю под управлением первого блока 26 управления.
[0031] Первый блок 26 управления содержит первый агент 14, первый блок связи 16, первый блок 30 сбора данных, первый блок 32 получения показателя, первый блок 34 памяти и первый блок 36 вывода. Первый блок 30 сбора данных получает информацию об окружающем пространстве, информацию о состоянии движения, речевую информацию, информацию о месте назначения и информацию о местоположении от первого датчика 22 транспортного средства и первого навигационного устройства 24.
[0032] Первый блок 32 получения показателя получает предпочтения вождения водителя на основе информации о режиме движения, полученной первым блоком 30 сбора данных. Первый блок 32 получения показателя классифицирует поведение вождения водителя на несколько уровней в зависимости от того, управляет ли водитель спокойно или резко, на основе информации о режиме движения, указывающей на предысторию вождения. Далее, первый блок 32 получения показателя сохраняет информацию о классификации, которая указывает на плавность вождения, в первом блоке 34 памяти в качестве предпочтений вождения.
[0033] Первый блок 34 памяти сохраняет информацию, указывающую на предпочтения вождения водителя, а также личную информацию, указывающую на пол и возраст водителя, в качестве информации о показателе вождения водителя. Информация о показателе вождения водителя содержит информацию показателя о водителе и информацию, указывающую на предпочтения вождения. Кроме того, первый блок 34 памяти сохраняет информацию о карте.
[0034] Первый блок 36 вывода формирует изображение и речевые сигналы для передачи на первое передающее устройство 28, в соответствии с определением первым агентом 14, и передает сформированную информацию на первое передающее устройство 28, для обеспечения водителя информацией.
[0035] Первый агент 14 взаимодействует со вторым агентом 18 второго транспортного средства 12, чтобы предоставить информацию помощи при вождении, используя информацию об окружающем пространстве, информацию о состоянии движения, речевую информацию, информацию о месте назначения и информацию о местоположении, полученную первым блоком 30 сбора данных, а также информацию показателя вождения водителя, сохраненную в первом блоке 34 памяти.
[0036] Второе транспортное средство 12 оснащено вторым датчиком 42 Транспортного средства, вторым навигационным устройством 44, вторым блоком 46 управления и вторым передающим устройством 48. Второй блок 46 управления содержит второй агент 18, второй блок 20 связи, второй блок 50 сбора данных, второй блок 52 получения показателя, второй блок 54 памяти и второй блок 56 вывода. Поскольку каждая из функций, предусмотренных во втором транспортном средстве 12, такая же, как и у первого транспортного средства 10, описание будет опущено.
[0037] Фиг. 4 представляет собой схему, показывающую функциональную конфигурацию первого агента 14. Первый агент 14 имеет блок 60 оценки, блок 62 взаимодействия и блок 64 ответа пользователя.
[0038] Блок 64 ответа пользователя распознает речь первого водителя и отвечает на речь для взаимодействия с водителем. Блок 64 ответа пользователя не только реагирует на речь первого водителя, но также выдает голосовое сообщение, которое побуждает первого водителя говорить, или предоставляет первому водителю информацию помощи при вождении. Например, блок 64 ответа пользователя выдает голосовое сообщение «Куда вы едете?», чтобы побудить первого водителя говорить о месте назначения или, в зависимости от информации о скорости транспортного средства, выдает голосовое сообщение «Двигайтесь с уменьшенной скоростью» для обеспечения помощи при вождении.
[0039] Блок 64 ответа пользователя обновляет информацию о показателе вождения первого водителя на основе речи первого водителя. Например, блок 64 ответа пользователя идентифицирует пол, возраст и характер первого водителя из речи первого водителя и сохраняет идентифицированную информацию в первом блоке 34 памяти в качестве показателя вождения первого водителя. Блок 64 ответа пользователя может получить информацию о показателе вождения первого водителя, которая не является данными о вождении, путем анализа речи первого водителя.
[0040] Может быть множество типов информации о показателе вождения водителя. Например, показатель вождения водителя может включать в себя параметр скорости транспортного средства, параметр уступки преимущества проезда, и параметр управления при обгоне.
[0041] Фиг. 5 представляет собой схему, показывающую информацию о показателе вождения водителя. Первый блок 34 памяти сохраняет пол, возраст, параметр превышения скорости, параметр уступки преимущества проезда, параметр управления при обгоне и тому подобное в сочетании с идентификатором водителя. Параметр превышения скорости задается на основе частоты, с которой была превышена скорость, и скорости транспортного средства, на которую превысило ограничение скорости. Параметр уступки преимущества проезда устанавливается в зависимости от того, сколько раз другим транспортным средствам было разрешено въезжать на полосу впереди хост-транспортного средства с другой полосы движения, и сколько раз другим транспортным средствам не разрешалось въезжать на полосу впереди хост-транспортного средства с другой полосы движения. Параметр управления при обгоне устанавливается в зависимости от того, сколько раз обгонялось хост-транспортное средство. Информация о показателе вождения водителя состоит из параметров, указывающих на множество типов предпочтений вождения, причем эти параметры используются для получения информации помощи при вождении. Множество типов предпочтений вождения водителя, если они установлены таким образом, позволяют агенту точно спрогнозировать поведение водителя, соответствующее состоянию движения, предоставляя соответствующую информацию помощи при вождении.
[0042] В примере, показанном на фиг. 5, первое транспортное средство 10 используется несколькими водителями, например, членами семьи, с информацией о показателе вождения каждого водителя, хранящегося в первом блоке 34 памяти. Каждый из нескольких типов параметров представлен числовым значением от 0 до 100, при этом большее числовое значение указывает на предпочтение резкого вождения. Фиг. 5 выявляет, что водитель в верхнем ряду резче, чем водитель в нижнем ряду в любом типе предпочтений вождения; то есть водитель в верхнем ряду легче превышает ограничение скорости, более неохотно уступает право проезда другому транспортному средству и его реже обгоняют.
[0043] Информация о показателе вождения первого водителя может быть выведена на основе информации помощи при вождении, предоставленной первым агентом 14, а также речи и результатах управления первого водителя, который получил информацию помощи при вождении. Например, предположим, что первый агент 14 предоставил первому водителю информацию помощи при вождении, указывающую «Существует транспортное средство, встраивающееся в поток справа». В этом случае, если первый водитель говорит, что другому транспортному средству не разрешено въезжать в полосу впереди хост-транспортного средства, или если другому транспортному средству не разрешено въезжать в полосу впереди хост-транспортного средства, первый блок 32 получения показателя обновляет параметр уступки преимущества проезда таким образом, что параметр увеличивается. И наоборот, если первый водитель разрешил другому транспортному средству въехать на полосу впереди хост-транспортного средства, первый блок 32 получения показателя обновляет параметр уступки преимущества проезда таким образом, что он уменьшается. Таким образом, первый агент 14 обновляет параметры, которые указывают на предпочтения вождения, на основе действий первого водителя, реагирующего на информацию помощи при вождении, предоставленную первым агентом 14, например, на основе ответа первого водителя на информацию помощи при вождении или на основе результата управления.
[0044] Как показано на фиг. 4, блок 60 оценки получает информацию о месте назначения из речи первого водителя и, из принятой таким образом информации о месте назначения и информации карты, сохраненной в первом блоке 34 памяти, оценивает график движения первого транспортного средства 10. Блок 60 оценки может получать информацию о месте назначения, которая не установлена в первом навигационном устройстве 24, из речи первого водителя. Из полученной информации о месте назначения, блок 60 оценки оценивает дорогу, по которой запланировано движение первого транспортного средства 10, и полосу движения, которая определяется в соответствии с тем, будет ли первое транспортное средство 10 поворачивать вправо-влево. Блок 60 оценки получает информацию о месте назначения от первого навигационного устройства 24, когда информация о месте назначения установлена в первом навигационном устройстве 24, и оценивает график движения первого транспортного средства 10 из информации о месте назначения и информации о карте.
[0045] Блок 60 оценки получает информацию о показателе вождения первого водителя от первого блока 34 памяти и, основываясь на информации о показателе вождения первого водителя, оценивает график движения первого транспортного средства 10. Например, если предпочтения вождения водителя указывают на то, что водитель управляет спокойно, блок оценки 60 оценивает, что водитель будет продолжать двигаться спокойно в левой полосе на скоростной автомагистрали. И наоборот, если предпочтения вождения водителя указывают, что водитель управляет резко, блок оценки 60 оценивает, что водитель будет перемещаться быстро по правой полосе на скоростной автомагистрали. Таким образом, исходя из показателя вождения, блок 60 оценки оценивает полосу движения, а также время, за которое водитель будет менять полосу.
[0046] Кроме того, на основе информации о показателе вождения первого водителя блок 60 оценки оценивает, разрешать ли другому транспортному средству вклиниться или обгонять. Например, если предпочтения вождения водителя указывают на то, что водитель управляет спокойно, блок оценки 60 оценивает, что водитель разрешит другому транспортному средству вклиниться при медленном движении и что, если предпочтения вождения водителя указывают на то, что водитель управляет резко, блок 60 оценки оценивает, что водитель не разрешит вклиниться другим транспортным средствам.
[0047] Блок 62 взаимодействия идентифицирует информацию о предстоящем управлении первого водителя в первом транспортном средстве 10 и отправляет идентифицированную информацию о предстоящем управлении второму агенту 18. Информация о предстоящем управлении первого водителя содержит информацию о графике движения, оцененную блоком 60 оценки, и информацию о речи, полученную блоком 64 ответа пользователя, и включает в себя информацию о движении в будущем. Информация о предстоящем управлении первого водителя является информацией, которая информирует о графике управления первого водителя в близлежащих зонах первого транспортного средства 10 и/или второго транспортного средства 12. Близлежащие зоны первого транспортного средства 10 и/или второго транспортного средства 12 могут представлять собой диапазон, определяемый первым датчиком 22 транспортного средства и/или вторым датчиком 42 транспортного средства. То есть информация о предстоящем управлении не является информацией о графике движения в отдаленном будущем, как например, информация о месте назначения, а является информацией о графике движения хост-транспортного средства, относящейся к движению других транспортных средств вблизи хост-транспортного средства, например, информация о графике движения в ближайшем будущем, как например, «обгон с этого момента» или «изменение полосы с этого момента».
[0048] Информация о предстоящем управлении, оцениваемая блоком 60 оценки, содержит информацию, полученную путем оценки из показателя вождения первого водителя, информацию, полученную путем оценки графика движения из речи первого водителя, и информацию, полученную путем оценки из информации о месте назначения, которая установлена в первом навигационном устройстве 24. Информация о предстоящем управлении, полученная блоком 64 ответа пользователя, содержит информацию об управлении, сообщенную первому водителю, информацию об управлении, подлежащую сообщению первому водителю и информацию об управлении, одобренную первым водителем.
[0049] Блок 62 взаимодействия устанавливает информацию помощи при вождении на основе информации о графике движения второго транспортного средства 12, полученную в результате взаимодействия со вторым агентом 18. Например, блок 62 взаимодействия первого агента 14 уведомляет первого водителя об информации помощи при вождении, которая предупреждает водителя об обгоне, например, как показано на фиг. 2А. Блок взаимодействия второго агента 18 уведомляет второго водителя об информации помощи при вождении, которая побуждает водителя совершить обгон, например, как показано на фиг. 2В.
[0050] Первый блок 16 связи отправляет информацию о показателе вождения первого водителя и информацию о предстоящем управлении на второй блок 20 связи и принимает информацию о показателе вождения второго водителя и информацию о предстоящем управлении от второго блока 20 связи.
[0051] Фиг. 6 представляет собой схему, показывающую пример помощи при вождении на основе информации о показателях вождения водителей, полученной посредством взаимодействия между агентами. В этом примере первый водитель сначала говорит, что он или она хочет изменить полосу движения. После восприятия этого речевого сигнала, первый агент 14 получает информацию о втором транспортном средстве 12, находящемся вблизи первого транспортного средства 10, из результата распознавания первого датчика 22 транспортного средства и начинает взаимодействие со вторым агентом 18. Первый агент 14 также может получить информацию о местоположении второго транспортного средства 12 через серверное устройство.
[0052] Второй агент 18 отправляет информацию о показателе вождения второго водителя первому агенту 14, и в этом случае информация о показателе вождения указывает, что водитель молод, и предпочтения вождения указывают на то, что вождение является резким. То есть, основываясь на показателе вождения второго водителя, первый агент 14 определяет, что для первого транспортного средства 10 не очень удобно менять полосу и перемещаться в положение перед вторым транспортным средством 12, формирует информацию помощи при вождении, рекомендующую, что первому транспортному средству 10 не следует менять полосу движения, чтобы переместиться в положение перед вторым транспортным средством 12, и уведомляет первого водителя о сформированной информации помощи при вождении. Таким образом, первый агент 14 может содействовать первому водителю при вождении, отправив предупреждение на основе показателя вождения второго водителя.
[0053] В ситуации движения, показанной на фиг. 6, если предпочтения вождения второго водителя указывают, что водитель управляет спокойно, первый агент 14 определяет, что первое транспортное средство 10 может изменить полосу. В этом случае, основываясь на этом определении, первый агент 14 может отправить информацию помощи при вождении первому водителю, чтобы указать, что первое транспортное средство 10 может изменить полосу.
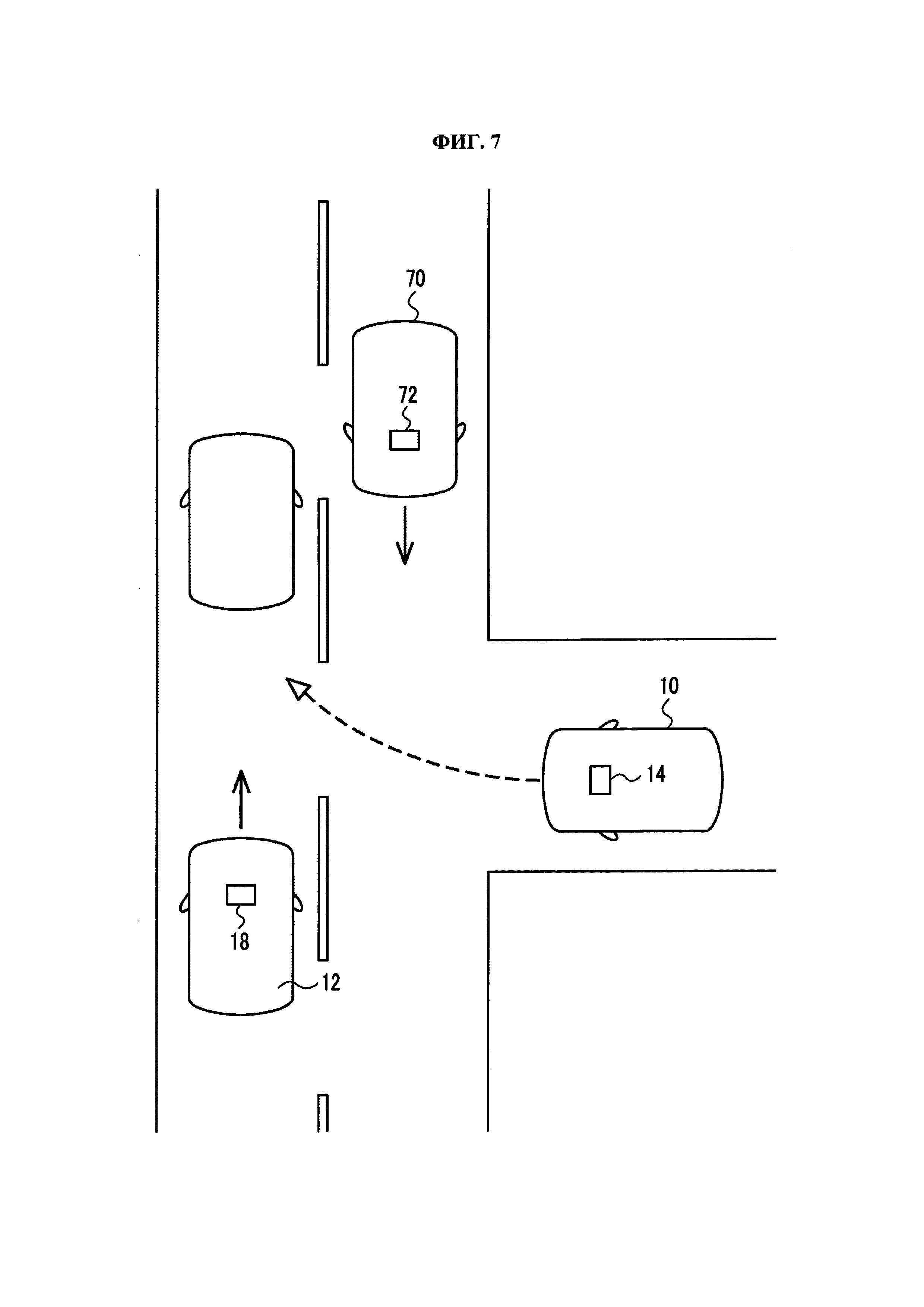
[0054] Фиг. 7 представляет собой схему, показывающую пример помощи при вождении на основе информации о предстоящем управлении водителей, полученной в результате взаимодействия между агентами. В этом примере первое транспортное средство 10 будет поворачивать направо на Т-образном перекрестке, а первый агент 14 получает информацию о местоположении второго транспортного средства 12 и третьего транспортного средства 70 из результата определения первого датчика 22 транспортного средства.
[0055] Из речи первого водителя первый агент 14 оценивает, что первое транспортное средство 10 собирается повернуть направо, и отправляет информацию, которая указывает, что первое транспортное средство 10 будет поворачивать направо, второму агенту 18 и третьему агенту 72 в виде информации о предстоящем управлении.
[0056] Второй агент 18 и третий агент 72 уведомляют каждого водителя, что первое транспортное средство 10 собирается повернуть направо. В ответ на это уведомление, второй водитель говорит, что первое транспортное средство 10 может вклиниться впереди второго транспортного средства 12, а третий водитель говорит, что первое транспортное средство 10 может пересечь полосу первым. На основании речевого сигнала второго водителя, второй агент 18 отправляет информацию, которая указывает, что первому транспортному средству 10 разрешено поворачивать направо, а второе транспортное средство 12 временно останавливается, первому агенту 14 в качестве информации о предстоящем управлении. Аналогичным образом, на основании речевого сигнала третьего водителя третий агент 72 отправляет информацию, которая указывает, что первому транспортному средству 10 разрешено поворачивать направо, а третье транспортное средство 70 временно останавливается, первому агенту 14 в качестве информации о предстоящем управлении.
[0057] Первый агент 14 получает информацию о графике движения второго транспортного средства 12 и третьего транспортного средства 70, формирует информацию помощи при вождении, указывающую, что первое транспортное средство 10 может сразу повернуть направо, и уведомляет первого водителя о сформированной информации помощи при вождении. После получения информации помощи при вождении от первого агента 14, первый водитель поворачивает направо и перемещает первое транспортное средство 10 перед вторым транспортным средством 12. Таким образом, график движения каждого водителя и информация, отправленная каждым агентом водителю для подтверждения, передаются между агентами, и водителю каждого транспортного средства отправляется информация о предстоящем управлении других транспортных средств в близлежащих зонах для содействия водителю во время вождения. Информация, отправляемая каждым агентом водителю для подтверждения, также используется для формирования предпочтений вождения водителя.
[0058] Фиг. 8 представляет собой схему, показывающую пример помощи при вождении на основе информации о показателе вождения водителей, полученной посредством взаимодействия между агентами, и информации о предстоящем управлении. Второй агент 18 получает информацию о местоположении первого транспортного средства 10 из результата определения второго датчика 42 транспортного средства для взаимодействия с первым агентом 14.
[0059] В этом примере, в качестве графика движения первого водителя, первый агент 14 получает информацию о том, что первое транспортное средство 10 намеревается изменить полосу на правую. Кроме того, в качестве информации о показателе вождения первого водителя, первый агент 14 получает информацию о том, что предпочтения вождения указывают на то, что вождение является спокойным, и что первому водителю около шестидесяти. На основе этой информации первый агент 14 оценивает, что первый водитель будет изменять полосу раньше, чем среднестатистический водитель. Первый агент 14 отправляет информацию, которая указывает, что первый водитель будет изменять полосу, второму агенту 18 в качестве информации о предстоящем управлении. Хотя первый агент 14 оценивает предстоящее управление первого водителя из показателя вождения и графика движения первого водителя в этом примере, настоящее изобретение не ограничено этим порядком; вместо этого второй агент 18 может получать показатель вождения и график движения первого водителя и оценивать предстоящее управление первого водителя.
[0060] После получения графика движения первого водителя, второй агент 18 уведомляет второго водителя о том, чтобы не обгонять первое транспортное средство 10. Это уведомление позволяет второму водителю вести осторожно, чтобы второе транспортное средство 12 не перегнало первое транспортное средство 10.
[0061] Этот вариант осуществления является просто примером, и для специалистов в данной области техники должно быть понятно, что возможны различные модификации при сочетании компонентов, и что такие модификации также входят в объем настоящего изобретения.
[0062] В данном варианте осуществления, хотя первый агент 14 и второй агент 18 содействуют водителю при вождении, уведомляя водителя об информации помощи при вождении, настоящее изобретение не ограничено этим порядком. Например, по меньшей мере, либо первое транспортное средство 10, либо второе транспортное средство 12 может находиться в автономном режиме вождения, а информация о предстоящем управлении другого транспортного средства, полученная в результате взаимодействия между первым агентом 14 и вторым агентом 18, может использоваться при автономном вождении транспортного средства.
[0063] Блок автономного управления транспортным средством выполняет управление, показанное на фиг. 7, то есть, управление поворотом первого транспортного средства 10 направо и управление временной остановкой второго транспортного средства 12 на основе информации о предстоящем управлении других транспортных средств, полученной в результате взаимодействия между агентами. Использование информации о предстоящем управлении другими транспортными средствами, полученной при взаимодействии между агентами, для автономного управления вождением, таким образом, позволяет определить маршрут движения других транспортных средств, обеспечивая тем самым безопасное управление.
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Способ взаимодействия между агентами и энергонезависимый носитель информации

