Результат интеллектуальной деятельности: СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ ЕЕ РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее раскрытие в общем относится к системе и способу управления одним или более компонентами транспортного средства на основе информации изображения, получаемой от камеры транспортного средства. Конкретнее, система управления транспортным средством на основе камеры выполнена с возможностью просмотра получаемой информации изображения для определения соответствующих случаев, при которых осуществляется управление различными компонентами транспортного средства.
Уровень техники
[0002] Когда водитель транспортного средства следует направлениям, выводимым навигационной системой его транспортного средства, при следовании навигационному маршруту к его месту назначения, навигационная система может пытаться направлять водителя на или через дорогу, которая закрыта. То есть навигационный маршрут, осуществляемый навигационной системой, проходит через закрытую дорогу. В эти примерах водителю нужно будет вручную регулировать навигационный маршрут так, что навигационный маршрут исключает прохождение через закрытую дорогу. При движении вблизи закрытых дорог водитель обычно находится в пределах зоны строительства. Зоны строительства обычно имеют более низкие, чем ожидается ограничения скорости, которые указаны нестандартными знаками. Зоны строительства обычно являются хаотичными и в некоторых примерах полны мусора, который может попадать на проезжую часть. Водитель должен быть постоянно бдительным, чтобы распознавать изменения в ограничении скорости и определять опасный мусор на проезжей части. Водитель может извлекать пользу из системы, которая контролирует окружение транспортного средства, прогнозирует, когда навигационный маршрут будет проходить через закрытую дорогу, превентивно изменяет навигационный маршрут для исключения закрытой дороги, идентифицирует изменения в ограничении скорости и идентифицирует опасный мусор на проезжей части.
Сущность изобретения
[0003] Эта заявка определена приложенной формулой изобретения. Описание обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие варианты осуществления предполагаются в соответствии с технологиями, описанными здесь, как будет очевидно специалисту в области техники при рассмотрении следующих далее чертежей и подробного описания, и такие варианты осуществления предназначены находиться в пределах объема охраны этой заявки.
[0004] Примерные варианты осуществления обеспечивают системы и способы контроля за окружением транспортного средства с использованием камеры, прогнозирующие, когда навигационный маршрут будет проходить через закрытую дорогу, превентивно изменяющие навигационный маршрут для исключения закрытой дороги, определяющие изменения в ограничении скорости и определяющие опасный мусор на проезжей части.
[0005] Согласно одному аспекту изобретения предложена система помощи водителю транспортного средства, содержащая: камеру (ы) транспортного средства, которая захватывает изображение(я), и процессор(ы), выполненный с возможностью: анализировать изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия; формировать и отображать навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия; определять, что одно из изображений предоставляет анализируемый знак закрытия дороги, но не анализируемое ассоциированное расстояние закрытия, и в ответ запрашивать сервер информации о трафике для определения ассоциированного расстояния закрытия.
Согласно одному варианту осуществления системы процессор(ы) выполнен с возможностью анализировать изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия посредством программного обеспечения обработки изображений, причем камера(ы) транспортного средства непосредственно смонтирована на транспортном средстве и при этом транспортное средство включает в себя (i) двигатель, выполненный с возможностью подачи механической мощности на колесо(а), и (ii) аккумулятор(ы).
Согласно другому варианту осуществления системы процессор(ы) выполнен с возможностью анализировать изображение(я) на предмет знаков закрытия дороги по меньшей мере частично посредством сравнения изображения(й) с предварительно сохраненными изображениями множества различных знаков закрытия дороги.
Согласно другому варианту осуществления системы процессор(ы) выполнен с возможностью формировать навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия таким образом, что навигационный маршрут избегает закрытых дорог на протяжении их ассоциированных расстояний закрытия.
Согласно второму аспекту изобретения предложена система помощи водителю транспортного средства, содержащая: камеру(ы) транспортного средства, которая захватывает изображение(я); процессор(ы), выполненный с возможностью: анализировать изображение(я) на предмет (i) знаков закрытия дороги и (ii) ассоциированных расстояний закрытия; формировать и отображать навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия; начинать анализ изображения(й) на предмет знаков объезда при обнаружении анализируемого знака закрытия дороги; определять, что одно из изображений предоставляет анализируемый знак закрытия дороги, но не анализируемое ассоциированное расстояние закрытия, и в ответ запрашивать сервер информации о трафике для определения ассоциированного расстояния закрытия.
Согласно одному варианту осуществления системы процессор(ы) выполнен с возможностью анализировать изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия посредством программного обеспечения обработки изображений, причем камера(ы) транспортного средства непосредственно смонтирована на транспортном средстве и при этом транспортное средство включает в себя двигатель, выполненный с возможностью подачи механической мощности на колесо(а), и аккумулятор(ы).
Согласно третьему аспекту изобретения предложена система помощи водителю транспортного средства, содержащая: камеру(ы) транспортного средства, которая захватывает изображение(я); процессор(ы), выполненный с возможностью: анализировать изображение(я) на предмет (i) знаков закрытия дороги и (ii) ассоциированных расстояний закрытия; формировать и отображать навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия; анализировать изображение(я) на предмет объектов и ширины дороги; сравнивать ширины объектов с шириной дороги; выводить предупреждения об опасности на основании результатов сравнений.
Согласно одному варианту осуществления системы процессор(ы) выполнен с возможностью выводить предупреждения об опасности посредством формирования графического представления на дисплее.
Согласно другому варианту осуществления системы процессор(ы) выполнен с возможностью модулирования интенсивностей выводимых предупреждений об опасности на основании определенных идентификационных данных анализируемых объектов.
Согласно другому варианту осуществления системы процессор(ы) выполнен с возможностью анализировать изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия посредством программного обеспечения обработки изображений, причем камера(ы) транспортного средства непосредственно смонтирована на транспортном средстве и при этом транспортное средство включает в себя (i) двигатель, выполненный с возможностью подачи механической мощности на колесо(а), и (ii) аккумулятор(ы).
Согласно четвертому аспекту изобретения предложена система помощи водителю транспортного средства, содержащая: камеру(ы) транспортного средства, которая захватывает изображение(я); навигационный модуль, который обеспечивает возможность ввода пользователем требуемого навигационного маршрута, причем навигационный маршрут является перенастраиваемым навигационным маршрутом; процессор(ы), выполненный с возможностью: анализировать изображение(я) на предмет (i) знаков закрытия дороги и (ii) ассоциированных расстояний закрытия; формировать и отображать навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия; определять отсутствие требуемого навигационного маршрута из навигационного модуля; формировать и отображать перенастраиваемый навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия, даже когда требуемый навигационный маршрут из навигационного модуля отсутствует.
Согласно одному варианту осуществления системы процессор(ы) выполнен с возможностью анализировать изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия посредством программного обеспечения обработки изображений, причем камера(ы) транспортного средства непосредственно смонтирована на транспортном средстве и при этом транспортное средство включает в себя (i) двигатель, выполненный с возможностью подачи механической мощности на колесо(а), и (ii) аккумулятор(ы).
Согласно другому варианту осуществления системы процессор(ы) выполнен с возможностью определять, что одно из изображений включает в себя анализируемый знак закрытия дороги, но не анализируемое ассоциированное расстояние закрытия, и в ответ запрашивать сервер информации о трафике для определения ассоциированного расстояния закрытия.
[0006] Согласно пятому аспекту изобретения предложен способ помощи водителю транспортного средства, содержащий этапы, на которых посредством процессора(ов), который принимает захваченное(ые) изображение(я) от камер(ы) транспортного средства: анализируют изображение(я) на предмет (i) знаков закрытия дороги и (ii) ассоциированных расстояний закрытия; формируют и отображают навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия; анализируют изображение(я) на предмет знаков закрытия дороги и ассоциированных расстояний закрытия посредством программного обеспечения обработки изображений; анализируют изображение(я) на предмет знаков закрытия дороги посредством сравнения изображения(й) с предварительно сохраненными изображениями множества различных знаков закрытия дороги; формируют навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия таким образом, что навигационный маршрут избегает закрытых дорог на протяжении их ассоциированных расстояний закрытия; определяют, что одно из изображений включает в себя анализируемый знак закрытия дороги, но не анализируемое ассоциированное расстояние закрытия, и в ответ запрашивают сервер информации о трафике для определения ассоциированного расстояния закрытия.
Согласно одному варианту осуществления способ дополнительно включает в себя этап, на котором начинают анализ изображения(й) на предмет знаков объезда при обнаружении анализируемого знака закрытия дороги.
Согласно другому варианту осуществления способ дополнительно включает в себя в себя этапы, на которых: анализируют изображение(я) на предмет объектов и ширины дороги; сравнивают ширины объектов с шириной дороги; выводят предупреждения об опасности на основании результатов сравнений.
Согласно другому варианту осуществления способ дополнительно включает в себя этап, на котором выводят предупреждения об опасности посредством формирования графического представления на дисплее.
Согласно другому варианту осуществления способ дополнительно включает в себя этап, на котором управляют интенсивностями выводимых предупреждений об опасности на основании определенных идентификационных данных анализируемых объектов.
Согласно другому варианту осуществления способа навигационный маршрут является перенастраиваемым навигационным маршрутом, а способ дополнительно включает в себя этапы, на которых: определяют отсутствие требуемого навигационного маршрута из навигационного модуля; формируют и отображают перенастраиваемый навигационный маршрут на основании анализируемых знаков закрытия дороги и анализируемых ассоциированных расстояний закрытия, даже когда требуемый навигационный маршрут из навигационного модуля отсутствует.
Краткое описание чертежей
[0007] Для лучшего понимания изобретения может быть сделана ссылка на варианты осуществления, показанные на следующих чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены так, чтобы подчеркнуть и ясно проиллюстрировать новые признаки, описанные здесь. В дополнение, компоненты системы могут быть по-разному расположены, как известно в уровне техники. На Фигурах одинаковые ссылочные позиции могут относиться к одинаковым частям на всех различных фигурах, если не указано иное.
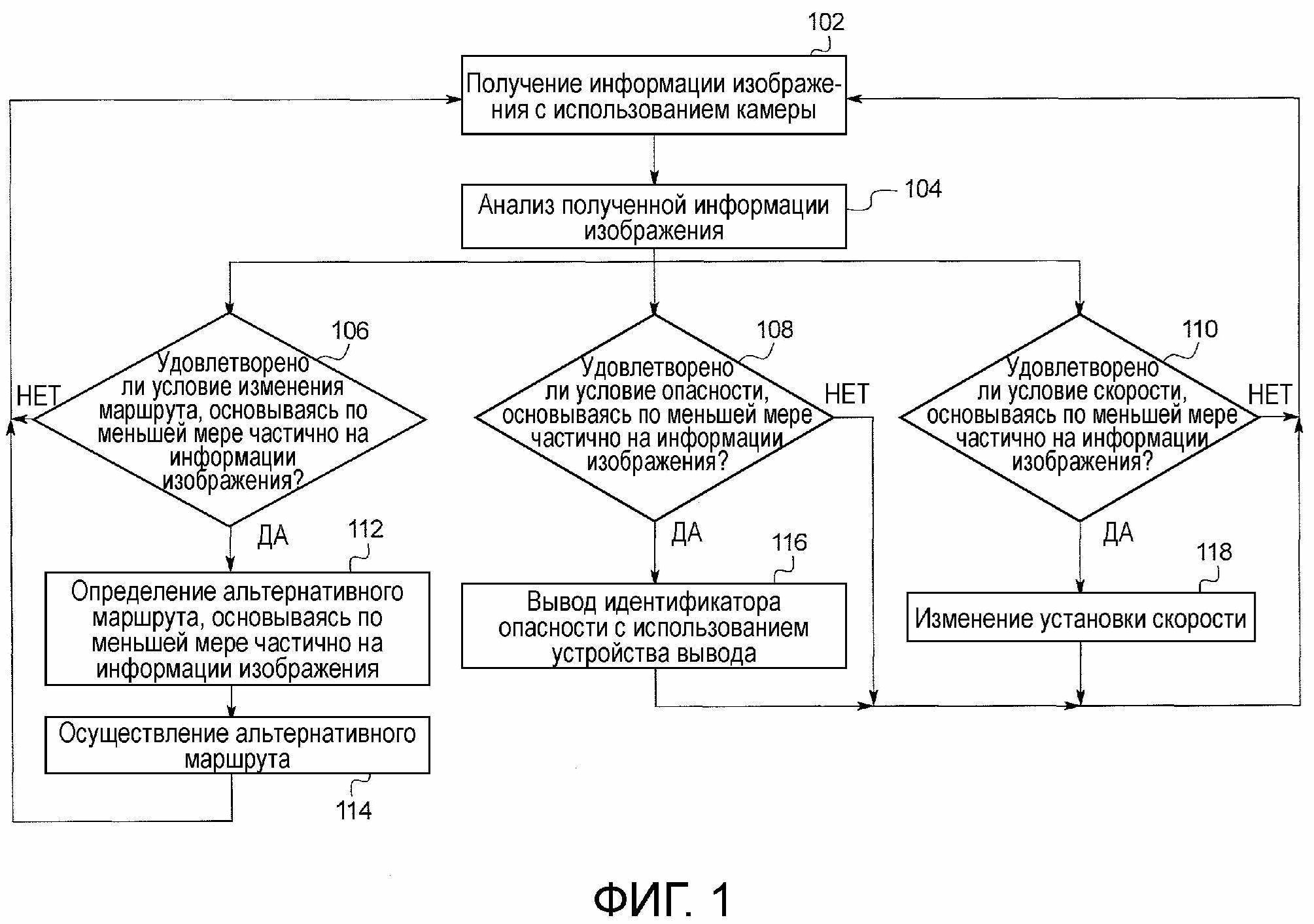
[0008] Фигура 1 представляет собой блок-схему, иллюстрирующую процесс функционирования одного примерного варианта осуществления системы управления транспортным средством на основе камеры настоящего раскрытия.
[0009] Фигура 2 представляет собой снимок экрана дисплея навигационной системы транспортного средства, отображающего осуществляемый в настоящее время навигационный маршрут, которому следует водитель транспортного средства.
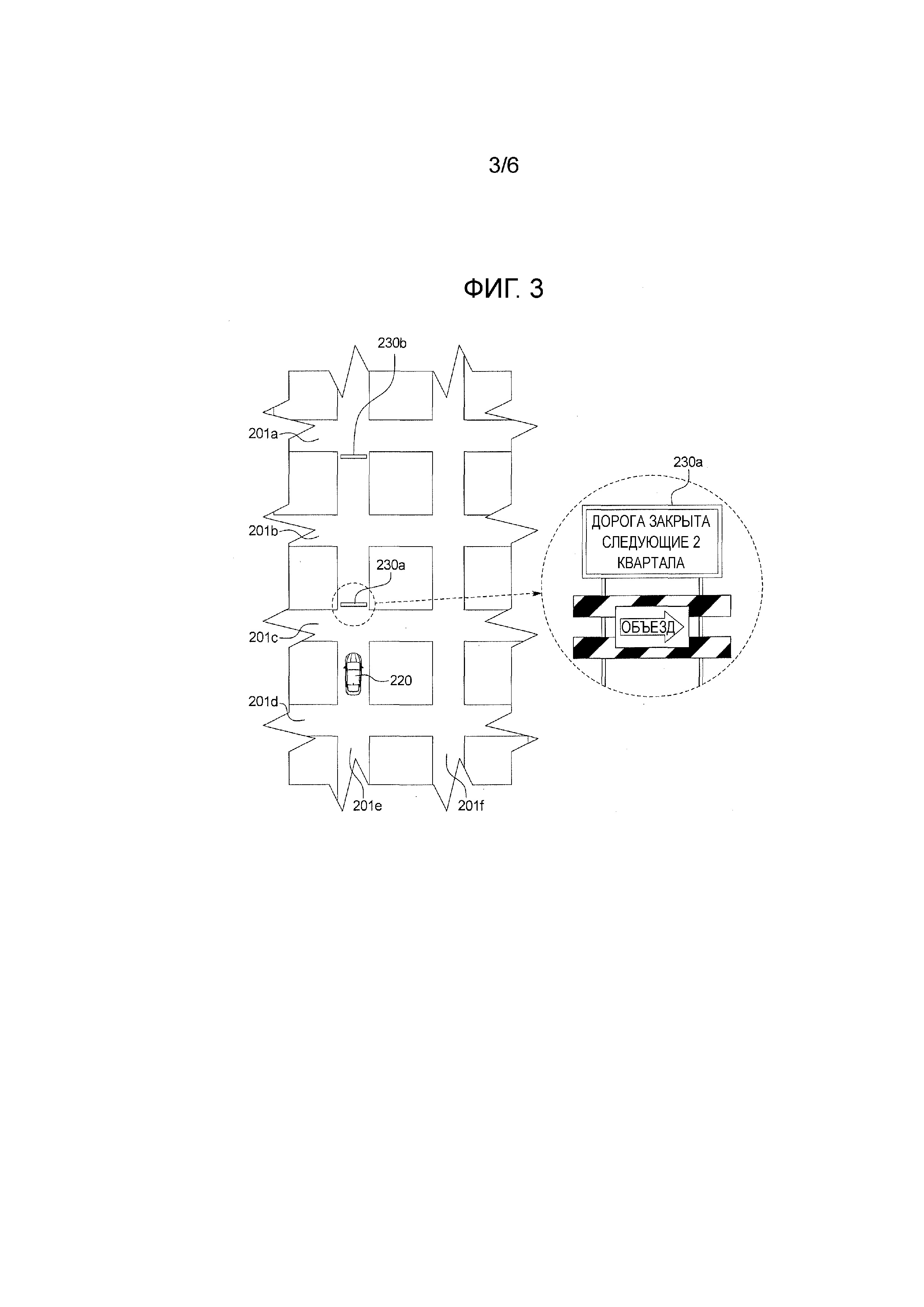
[0010] Фигура 3 представляет собой вид сверху транспортного средства на Фигуре 2, которое включает в себя один вариант осуществления системы управления транспортным средством на основе камеры настоящего раскрытия и которое движется по улице вдоль навигационного маршрута, показанного на Фигуре 2.
[0011] Фигура 4 представляет собой снимок экрана дисплея навигационной системы транспортного средства на Фигуре 2, отображающего указатель альтернативного навигационного маршрута, указывающий альтернативный навигационный маршрут.
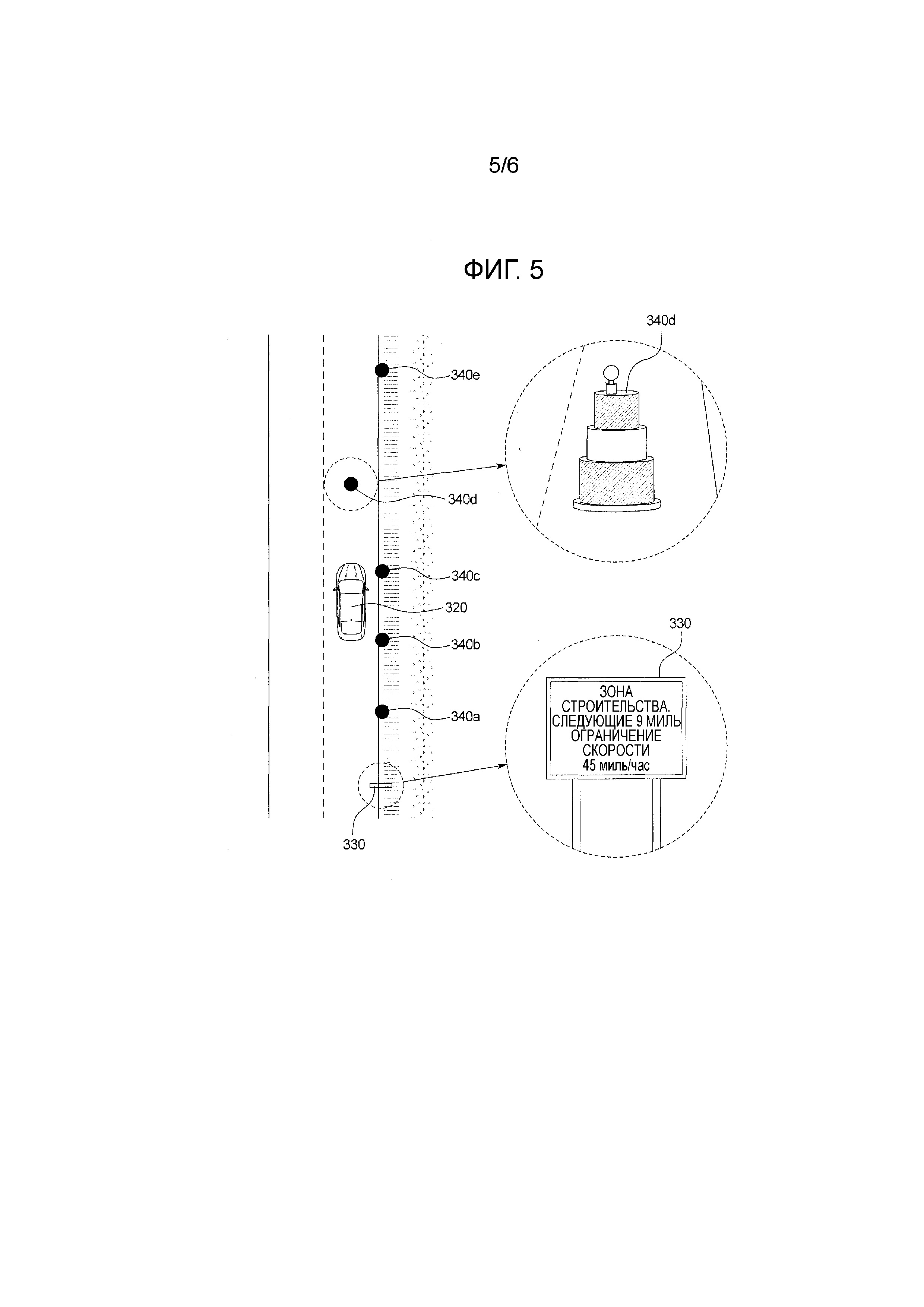
[0012] Фигура 5 представляет собой вид сверху другого транспортного средства, которое включает в себя другой вариант осуществления системы управления транспортным средством на основе камеры настоящего раскрытия и которое движется в пределах зоны строительства.
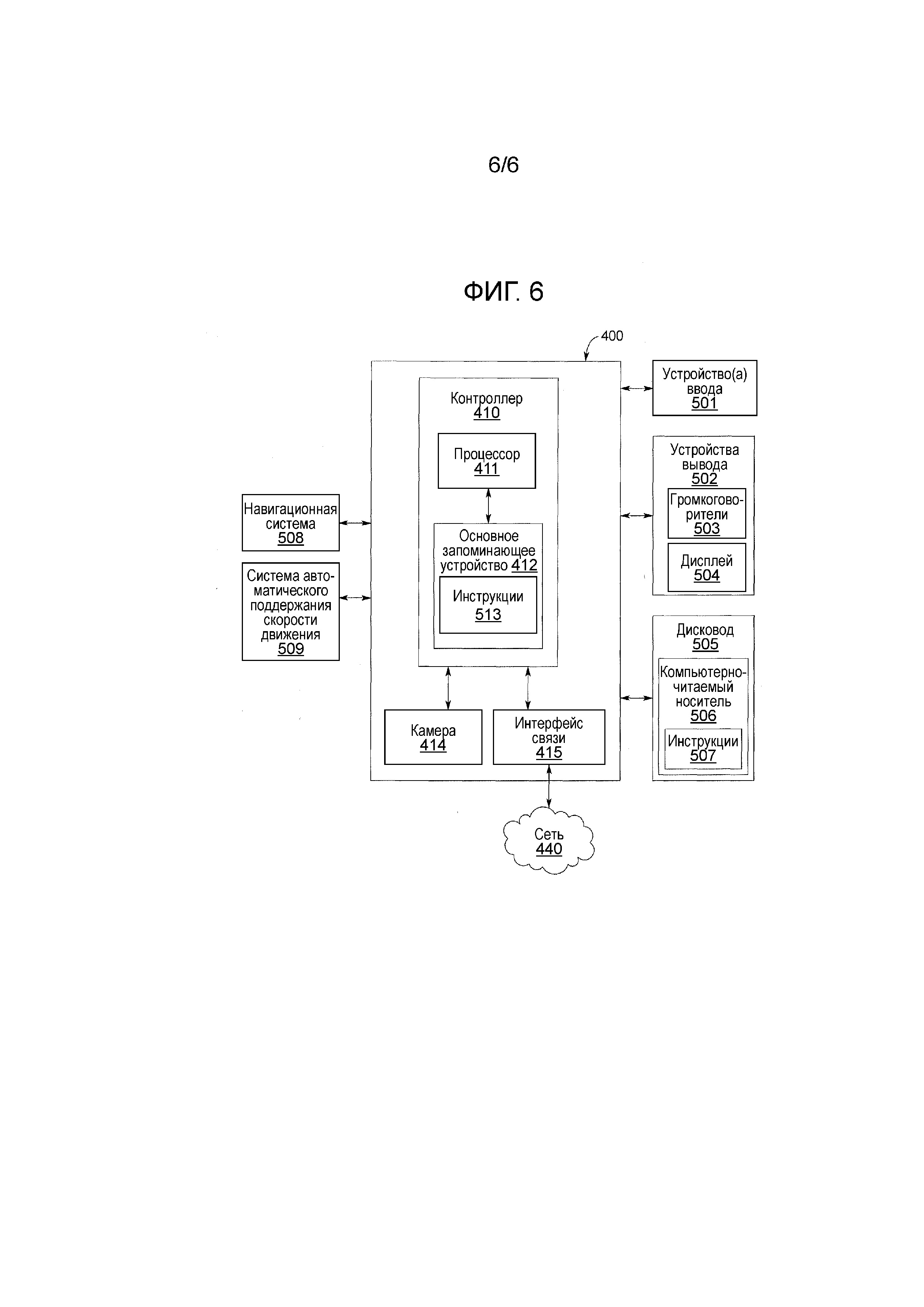
[0013] Фигура 6 иллюстрирует блок-схему, включающую в себя компоненты одного варианта осуществления системы управления транспортным средством на основе камеры настоящего раскрытия.
Подробное описание примерных вариантов осуществления
[0014] Хотя система управления транспортным средством на основе камеры и способ настоящего раскрытия могут быть осуществлены в различных формах, показаны на чертежах и будут далее описаны некоторые примерные и неограничивающие варианты осуществления системы управления транспортным средством на основе камеры и способа. Настоящее раскрытие должно рассматриваться как иллюстрация системы управления транспортным средством на основе камеры и способа и не предназначено для ограничения системы управления транспортным средством на основе камеры и способа определенными вариантами осуществления, проиллюстрированными и описанными здесь. Однако не все изображенные компоненты, описанные в этом раскрытии, могут требоваться, и некоторые варианты осуществления могут включать в себя дополнительные, различные компоненты или меньшее количество компонентов из тех, которые явно описаны здесь. Изменения в расположении и типе компонентов могут быть выполнены без отклонения от сущности или объема охраны формулы изобретения, изложенной здесь.
[0015] Различные варианты осуществления настоящего раскрытия обеспечивают систему и способ управления одним или более компонентами транспортного средства на основе информации изображения, получаемой от камеры. В общем, система управления транспортным средством на основе камеры настоящего раскрытия включает в себя камеру, выполненную с возможностью получения информации изображения о внешней окрестности, обычно впереди транспортного средства, и процессор, выполненный с возможностью анализа информации изображения, определения того, удовлетворено ли одно или более условий, основываясь (по меньшей мере частично) на информации изображения, и управления одним или более компонентами и/или преобразования одной или более установок транспортного средства (или его компонентов), если какое-либо из условий удовлетворено. Конкретнее, в некоторых вариантах осуществления процессор выполнен с возможностью: (1) определения того, удовлетворено ли условие изменения маршрута, основываясь по меньшей мере частично на информации изображения, и если так, то выполнен с возможностью изменения навигационного маршрута, осуществляемого навигационной системой транспортного средства; (2) определения того, удовлетворено ли условие опасности, основываясь по меньшей мере частично на информации изображения, и если так, то выполнен с возможностью предписывать устройству вывода транспортного средства (такого как громкоговорители транспортного средства или источник света на приборной панели транспортного средства) выводить предупреждение об опасности; и (3) определения того, удовлетворено ли условие скорости, основываясь по меньшей мере частично на информации изображения, и если так, то выполнен с возможностью изменения установки скорости транспортного средства (например, установки скорости системы автоматического поддержания скорости движения (круиз-контроля) транспортного средства).
[0016] Компоненты системы управления транспортным средством на основе камеры настоящего раскрытия (описанного подробно ниже) могут быть включены на, в или иным образом объединены с транспортным средством. Один или более компонентов системы управления транспортным средством на основе камеры могут использоваться совместно с одним или более компонентами существующих систем транспортного средства, например, (но не ограничиваясь) навигационной системы.
[0017] Система управления транспортным средством на основе камеры может быть включена в или иным образом может использоваться с любым подходящим транспортным средством, например, (но не ограничиваясь): (1) некоммерческим пассажирским транспортным средством, таким как седан или грузовик; (2) коммерческим транспортным средством, таким как тягач с прицепом; или (3) негражданским транспортным средством, таким как транспортное средство, используемое правоохранительными органами, правительственным учреждением, учреждением по реагированию на чрезвычайные ситуации (например, учреждением пожарной охраны), или учреждением медицинского реагирования (например, больницей). Этот список не является исчерпывающим и обеспечен только в целях приведения примера.
[0018] Признаки, процессы и способы, описанные здесь в отношении возможностей системы управления транспортным средством на основе камеры, могут быть осуществлены с помощью инструмента управления транспортным средством на основе камеры, функционирующего в системе управления транспортным средством на основе камеры. Инструмент управления транспортным средством на основе камеры может быть программой, приложением и/или комбинацией программного обеспечения и аппаратного обеспечения, которая включена в один или более компонентов, входящих в состав системы управления транспортным средством на основе камеры. Инструмент управления транспортным средством на основе камеры и система управления транспортным средством на основе камеры описаны более подробно ниже (и вместе для краткости называются системой управления транспортным средством на основе камеры).
[0019] Хотя транспортное средство и признаки, соответствующие описанной здесь системе управления транспортным средством на основе камеры, описаны ниже в ситуациях, в которых транспортное средство движется, также в пределах объема охраны этого раскрытия находится то, что те же признаки могут применяться, когда транспортное средство находится в неподвижном состоянии (например, припарковано, остановилось на красный свет или остановилось в пробке).
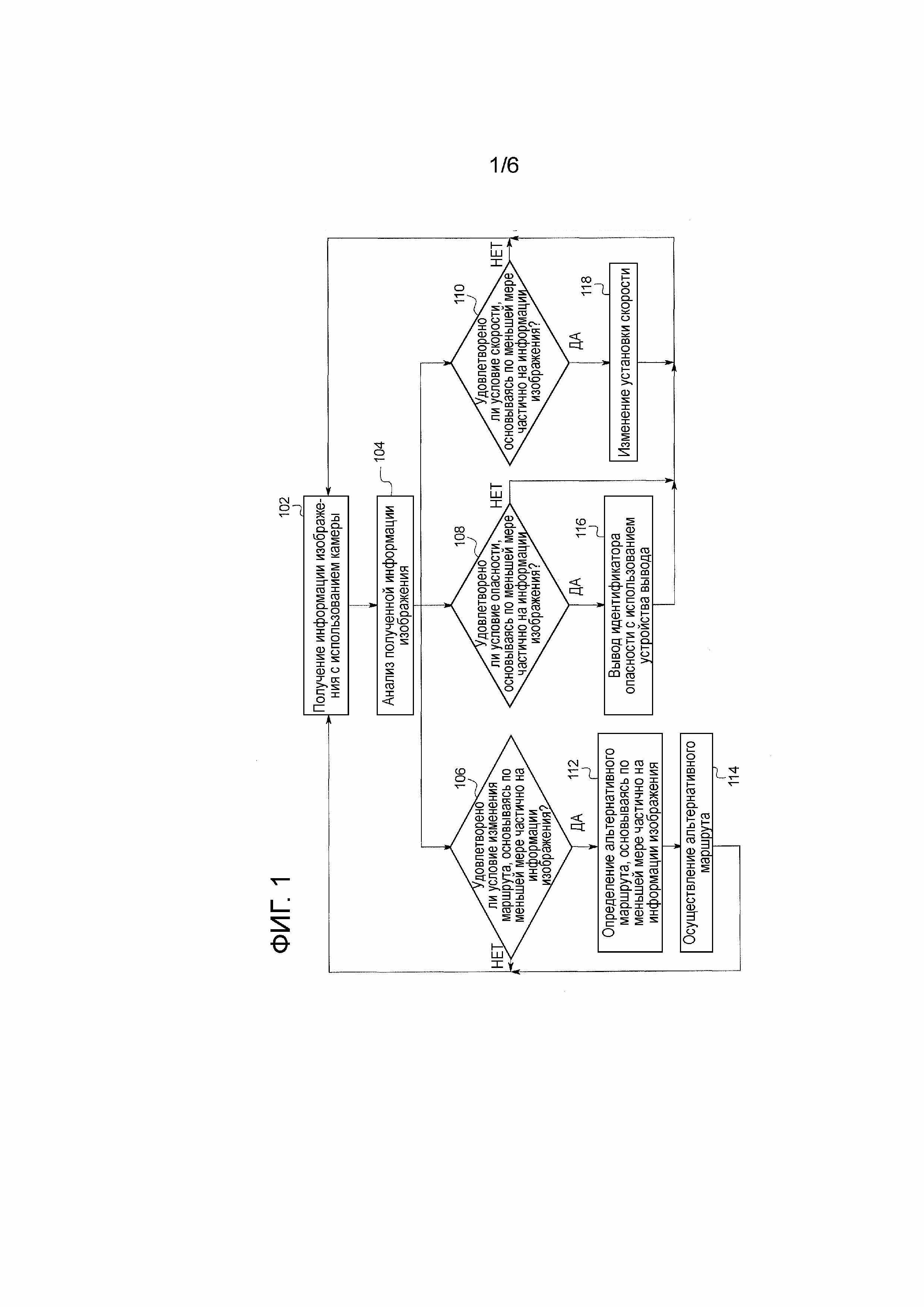
[0020] Фигура 1 представляет собой блок-схему примерного процесса или способа 100 функционирования системы управления транспортным средством на основе камеры настоящего раскрытия. В различных вариантах осуществления процесс 100 представлен набором инструкций, хранящихся в одном или более запоминающих устройствах и выполняемых одним или более процессорами (такими, как описанные ниже с использованием Фигуры 6). Хотя процесс 100 описан со ссылкой на блок-схему, показанную на Фигуре 1, многие другие процессы осуществления действий, связанных с этим проиллюстрированным процессом 100, могут быть применены. Например, порядок некоторых из проиллюстрированных блоков и/или ромбов может быть изменен, некоторые из проиллюстрированных блоков и/или ромбов могут быть возможными и/или некоторые из проиллюстрированных блоков и/или ромбов могут не применяться.
[0021] При работе этого варианта осуществления система управления транспортным средством на основе камеры получает информацию изображения с использованием камеры, как обозначено блоком 102. Например, обращенная вперед камера транспортного средства захватывает цифровое видео внешней окрестности передней части транспортного средства. Система управления транспортным средством на основе камеры анализирует получаемую информацию изображения, как обозначено блоком 104. Продолжая вышеупомянутый пример, процессор системы управления транспортным средством на основе камеры непрерывно (или через определенные интервалы) анализирует захватываемое цифровое видео для определения того, выполнено ли какое-либо из нижеуказанных условий, основываясь (по меньшей мере частично) на захватываемом цифровом видео.
[0022] Система управления транспортным средством на основе камеры затем делает три отдельных определения, основываясь на информации изображения. Конкретно, система управления транспортным средством на основе камеры: (1) определяет, удовлетворено ли условие изменения маршрута, основываясь по меньшей мере частично на информации изображения, как обозначено ромбом 106; (2) определяет, удовлетворено ли условие опасности, основываясь по меньшей мере частично на информации изображения, как обозначено ромбом 108; и (3) определяет, удовлетворено ли условие скорости, основываясь по меньшей мере частично на информации изображения, как обозначено ромбом 110. Система управления транспортным средством на основе камеры делает эти определения в любом подходящем порядке, одновременно или по существу одновременно.
[0023] Если система управления транспортным средством на основе камеры определяет в ромбе 106, что условие изменения маршрута удовлетворено, основываясь по меньшей мере частично на информации изображения, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, основываясь по меньшей мере частично на информации изображения, как обозначено блоком 112, и осуществляет альтернативный навигационный маршрут, как обозначено блоком 114. Продолжая вышеупомянутый пример, если процессор идентифицирует знак закрытой дороги в захваченном цифровом видео и определяет, что навигационный маршрут, осуществляемый навигационной системой транспортного средства, проходит через эту закрытую дорогу, процессор определяет, что условие изменения маршрута удовлетворено, определяет альтернативной навигационный маршрут, который исключает закрытую дорогу, и заставляет навигационную систему осуществлять альтернативный навигационный маршрут вместо осуществляемого в настоящее время навигационного маршрута. Затем процесс 100 возвращается к блоку 102. Если, с другой стороны, система управления транспортным средством на основе камеры определяет в ромбе 106, что условие изменения маршрута не удовлетворено, процесс 100 возвращается к блоку 102. Продолжая вышеупомянутый пример, если процессор идентифицирует знак закрытой дороги, но вместе с тем определяет, что навигационный маршрут, осуществляемый навигационной системой транспортного средства, не проходит через эту закрытую дорогу, процессор определяет, что условие изменения маршрута не удовлетворено.
[0024] Если система управления транспортным средством на основе камеры определяет в ромбе 108, что условие опасности удовлетворено, основываясь по меньшей мере частично на информации изображения, система управления транспортным средством на основе камеры выводит предупреждение об опасности с использованием устройства вывода, как обозначено блоком 116. Продолжая вышеупомянутый пример, если процессор идентифицирует мусор на проезжей части в захваченном цифровом видео, процессор определяет, что условие опасности удовлетворено и заставляет громкоговорители транспортного средства выводить предупреждение об опасности в виде повторяющегося звукового сигнала. Затем процесс 100 возвращается к блоку 102. Если, с другой стороны, система управления транспортным средством на основе камеры определяет в ромбе 108, что условие опасности не удовлетворено, процесс 100 возвращается к блоку 102. Продолжая вышеупомянутый пример, если процессор идентифицирует мусор на обочине дороги в захваченном цифровом видео, процессор определяет, что условие опасности не удовлетворено.
[0025] Если система управления транспортным средством на основе камеры определяет в ромбе 110, что условие скорости удовлетворено, основываясь по меньшей мере частично на информации изображения, система управления транспортным средством на основе камеры изменяет установку скорости транспортного средства, как обозначено блоком 110. Продолжая вышеупомянутый пример, если процессор идентифицирует знак ограничения скорости в захваченном цифровом видео и определяет, что установка скорости системы автоматического поддержания скорости движения транспортного средства выше, чем указанное ограничение скорости, процессор определяет, что условие скорости удовлетворено и изменяет установку скорости системы автоматического поддержания скорости движения транспортного средства для соответствия указанному ограничению скорости. Затем процесс 100 возвращается к блоку 102. Если, с другой стороны, система управления транспортным средством на основе камеры определяет в ромбе 110, что условие скорости не удовлетворено, процесс 100 возвращается к блоку 102. Продолжая вышеупомянутый пример, если процессор идентифицирует знак ограничения скорости в захваченном цифровом видео, но определяет, что установка скорости системы автоматического поддержания скорости движения транспортного средства соответствует указанному ограничению скорости, процессор определяет, что условие скорости не удовлетворено.
[0026] Каждое условие и соответствующее(ие) действие(я), выполняемое(ые) системой, когда система определяет, что это условие удовлетворено, объясняется подробно ниже.
Получение информации изображения
[0027] Как отмечено выше, система управления транспортным средством на основе камеры получает информацию изображения, такую как цифровые неподвижные изображения, потоковое видео и/или цифровое видео, с помощью одной или более подходящих камер (или других устройств формирования изображений) на, встроенных в или иным образом связанных с транспортным средством. По меньшей мере одна из камер ориентирована так, чтобы получать информацию изображения в окрестности и в общем впереди транспортного средства. Это позволяет камере получать данные изображений дорожных знаков и других объектов, которые обычно являются видимыми с позиции водителя транспортного средства.
[0028] В некоторых вариантах осуществления (и как описано подробно ниже) одна или более камер находятся в сообщении с и выполнены с возможностью передачи получаемой информации изображения процессору системы управления транспортным средством на основе камеры, чтобы позволять процессору анализировать информацию изображения. В других вариантах осуществления (и как описано подробно ниже) одна или более камер находятся в сообщении с и выполнены с возможностью передачи получаемой информации изображения на запоминающее устройство, которое в дальнейшем хранит информацию изображения. Процессор может просматривать информацию изображения путем доступа к запоминающему устройству.
Условие изменения маршрута
[0029] Как отмечено выше, когда система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, основываясь по меньшей мере частично на информации изображения, получаемой от камеры, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, который отличается от навигационного маршрута, осуществляемого навигационной системой транспортного средства, и заставляет навигационную систему транспортного средства осуществлять альтернативный навигационный маршрут (вместо осуществляемого в настоящее время навигационного маршрута).
[0030] В некоторых вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, когда: (1) навигационная система транспортного средства осуществляет навигационный маршрут, и (2) система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что дорога, через которую проходит осуществляемый в настоящее время навигационный маршрут, закрыта. Иными словами, в этих вариантах осуществления условие изменения маршрута удовлетворяется, когда система управления транспортным средством на основе камеры определяет, что навигационная система транспортного средства будет направлять водителя для движения по или на закрытую дорогу.
[0031] Система управления транспортным средством на основе камеры может определять, что дорога закрыта, основываясь на информации изображения, любым из множества способов. В различных вариантах осуществления система управления транспортным средством на основе камеры анализирует информацию изображения путем поиска информации изображения для изображений особых дорожных знаков (которые могут быть включены в базу данных, хранимую на запоминающем устройстве), таких как знаки «Дорога закрыта», знаки «Объезд», знаки «Нет сквозного движения», знаки «Только для местного движения» и любые другие подходящие указатели. В других вариантах осуществления система управления транспортным средством на основе камеры анализирует информацию изображения путем поиска информации изображения для объектов (таких как конусы, бочки, шлагбаумы, строительное оборудование, аварийные транспортные средства и т.п.), которые блокируют всю дорогу. Система управления транспортным средством на основе камеры может использовать любое подходящее программное обеспечение или инструмент для обработки изображений, чтобы анализировать информацию изображения.
[0032] Если условие изменения маршрута удовлетворено, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, который исключает закрытую дорогу, через которую проходит осуществляемый в настоящее время навигационный маршрут. В некоторых вариантах осуществления система управления транспортным средством на основе камеры использует информацию изображения, чтобы (по меньшей мере частично) определять альтернативный навигационный маршрут путем определения длины закрытой дороги, основываясь на информации изображения. Например, знак «Дорога закрыта» может указывать длину закрытой дороги, например, 2 мили. Вооружившись этой информацией, система управления транспортным средством на основе камеры может определять альтернативный навигационный маршрут, который исключает 2-мильный участок закрытой дороги. В различных вариантах осуществления, когда система управления транспортным средством на основе камеры не может определять длину закрытой дороги, основываясь на информации изображения, система управления транспортным средством на основе камеры взаимодействует с одной или несколькими другими системами, такими как системы информации о дорожном движении, новостные информационные системы, системы получения изображений с помощью спутников и т.п., для определения длины закрытой дороги. В других вариантах осуществления система управления транспортным средством на основе камеры не определяет альтернативный навигационный маршрут, а вернее, система управления транспортным средством на основе камеры отправляет соответствующую информацию (например, длину закрытой дороги) навигационной системе транспортного средства, и навигационная система транспортного средства определяет альтернативный навигационный маршрут.
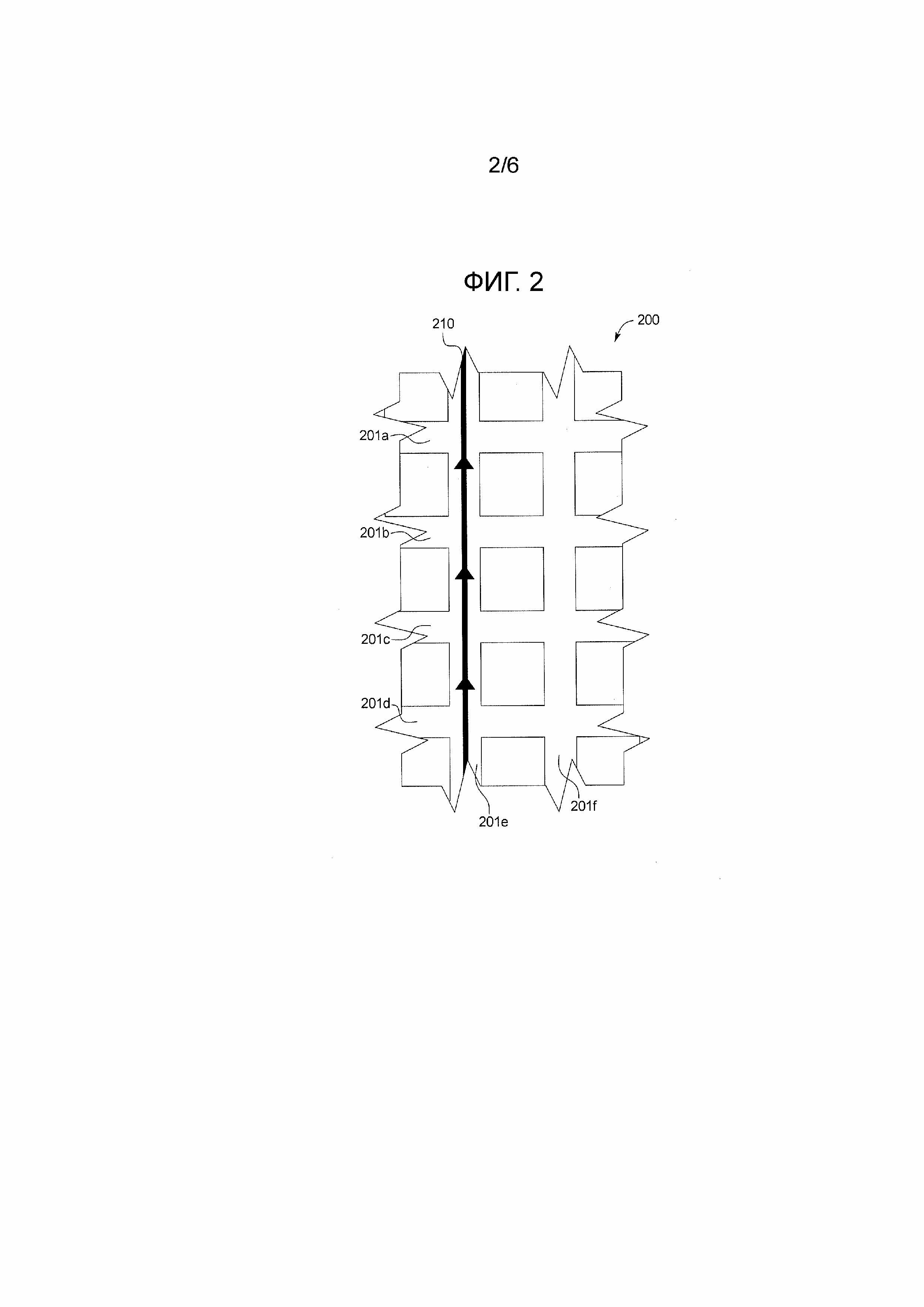
[0033] Фигура 2 представляет собой снимок 200 экрана дисплея навигационной системы транспортного средства 220 (показанного на Фигуре 3), отображающего осуществляемый в настоящее время навигационный маршрут, которому следует водитель. Снимок 200 экрана включает в себя улицы 201a, 201b, 201c, и 201d Восток-Запад; улицы 201e и 201f Север-Юг; и указатель 210 навигационного маршрута. Как обозначено указателем 210 навигационного маршрута, осуществляемый в настоящее время навигационный маршрут направляет водителя для движения на север вдоль улицы 201e.
[0034] Фигура 3 представляет собой вид сверху транспортного средства 220, которое включает в себя один вариант осуществления системы управления транспортным средством на основе камеры, движущегося по улице 201e вдоль навигационного маршрута. Здесь заграждения 230а и 230b блокируют улицу 201e между улиц 201c и 201a. Другими словами, улица 201e закрыта на протяжении 2-х кварталов между улицами 201c и 201a. Как обозначено указателем 210 навигационного маршрута на Фигуре 2, навигационный маршрут, осуществляемый в настоящее время навигационной системой транспортного средства 220, проходит через этот закрытой участок улицы 201e. Камера (не показана) системы управления транспортным средством на основе камеры транспортного средства 220 получает информацию изображения, которая включает в себя изображение заграждения 230a, которое включает в себя дорожный знак, имеющий текст «ДОРОГА ЗАКРЫТА СЛЕДУЮЩИЕ 2 КВАРТАЛА», напечатанный на нем. Процессор системы управления транспортным средством на основе камеры анализирует полученную информацию изображения, включающую в себя изображение заграждения 230a, и определяет, что улица 201e закрыта на протяжении двух кварталов.
[0035] Процессор системы управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено в данном случае, так как: (1) навигационная система транспортного средства 220 осуществляет навигационный маршрут, и (2) система управления транспортным средством на основе камеры определяет, основываясь на полученной информации изображения (включающей в себя изображение заграждения 230a), что улица 201e, через которую проходит осуществляемый в настоящее время навигационный маршрут, закрыта.
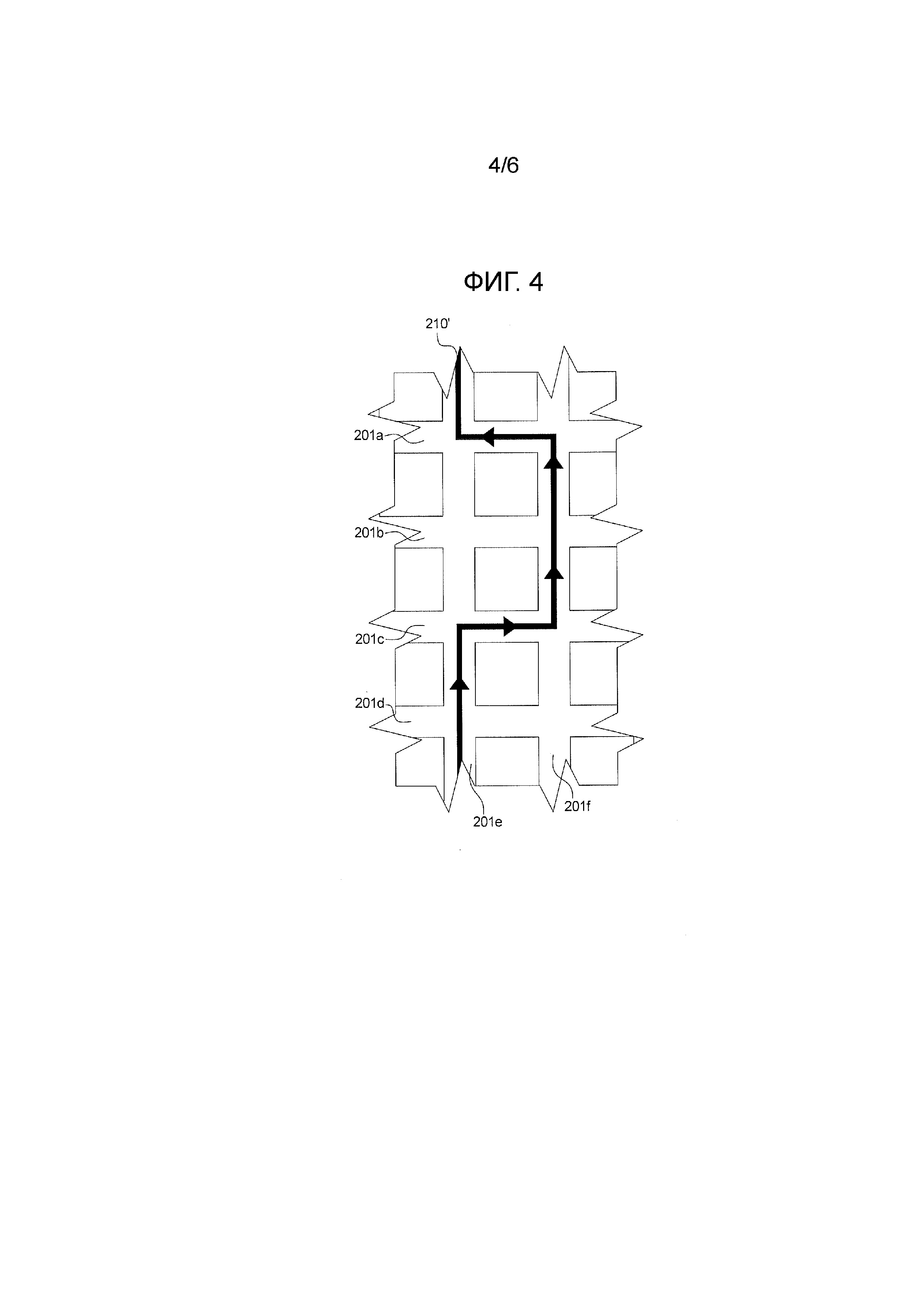
[0036] Так как условие изменения маршрута удовлетворено, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут для исключения закрытого участка улицы 201e. В этом примерном варианте осуществления система управления транспортным средством на основе камеры делает это путем создания альтернативного навигационного маршрута, который исключает улицу 201e на протяжении 2-х кварталов. Система управления транспортным средством на основе камеры далее заставляет навигационную систему транспортного средства 220 осуществлять альтернативный навигационный маршрут вместо осуществляемого в настоящее время навигационного маршрута. Фигура 4 представляет собой снимок 400 экрана экрана дисплея навигационной системы транспортного средства 220, отображающего указатель 210’ альтернативного навигационного маршрута, указывающий альтернативный навигационный маршрут, вместо указателя 210 первоначального навигационного маршрута, показанного на Фигуре 2. Альтернативный навигационный маршрут исключает закрытый участок улицы 201e, направляя водителя на восток по улице 201c, на север по улице 201f, на запад по улице 201a и на север по улице 201e.
[0037] В некоторых вариантах, осуществления когда система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, система управления транспортным средством на основе камеры автоматически определяет альтернативный навигационный маршрут и осуществляет альтернативный навигационный маршрут без ввода данных водителем. В других вариантах осуществления, когда система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, система управления транспортным средством на основе камеры запрашивает водителя, например через отображаемое указание и/или звуковое указание, желает ли водитель, чтобы система управления транспортным средством на основе камеры определяла и осуществляла альтернативный навигационный маршрут, и позволяет водителю вводить водительские инструкции (например, с помощью сенсорного экрана или голосовой команды). Система управления транспортным средством на основе камеры определяет и осуществляет альтернативный навигационный маршрут в этих вариантах осуществления только после получения водительских инструкций, чтобы сделать это. В дополнительных вариантах осуществления, когда система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, система управления транспортным средством на основе камеры автоматически определяет альтернативный навигационный маршрут, но запрашивает водителя, например через отображаемое указание и/или звуковое указание, желает ли водитель, чтобы система управления транспортным средством на основе камеры осуществляла альтернативный навигационный маршрут, и позволяет водителю вводить водительские инструкции. Система управления транспортным средством на основе камеры осуществляет альтернативный навигационный маршрут в этих вариантах осуществления только после получения водительских инструкций, чтобы сделать это.
[0038] В других вариантах осуществления вместо определения всего альтернативного навигационного маршрута заранее система управления транспортным средством на основе камеры динамически определяет альтернативный навигационный маршрут, основываясь на знаках «Объезд», которые система управления транспортным средством на основе камеры идентифицирует в информации изображения. Другими словами, в этих вариантах осуществления как только система управления транспортным средством на основе камеры определяет, что дорога закрыта, система управления транспортным средством на основе камеры контролирует и идентифицирует знаки «Объезд» и динамически обновляет навигационный маршрут после идентификации каждого последующего знака «Объезд». Например, в одном примерном варианте осуществления система управления транспортным средством на основе камеры определяет, что дорога закрыта, идентифицирует первый знак «Объезд», указывающий на восток, и обновляет навигационный маршрут для направления водителя на восток. Система управления транспортным средством на основе камеры далее идентифицирует второй знак «Объезд», указывающий на север, и система управления транспортным средством на основе камеры обновляет навигационный маршрут для направления водителя на север. Система управления транспортным средством на основе камеры далее идентифицирует третий знак «Объезд», указывающий на запад, и система управления транспортным средством на основе камеры обновляет навигационный маршрут для направления водителя запад. Система управления транспортным средством на основе камеры далее идентифицирует четвертый знак «Объезд», указывающий на север, и система управления транспортным средством на основе камеры обновляет навигационный маршрут для направления водителя на север.
[0039] Некоторые варианты осуществления объединяют это динамическое определение альтернативного навигационного маршрута с определением альтернативного навигационного маршрута заранее. Например, в одном примерном варианте осуществления система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут заранее и может изменять этот альтернативный навигационный маршрут, основываясь на идентифицируемых в дальнейшем знаках «Объезд».
[0040] В альтернативных вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, когда система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что дорога, через которую, скорее всего, пройдет транспортное средство, основываясь на текущей траектории транспортного средства, закрыта. Иными словами, в этих вариантах осуществления система управления транспортным средством на основе камеры прогнозирует, где транспортное средство будет продвигаться, и определяет, что условие изменения маршрута удовлетворено, когда траектория транспортного средства будет пересекаться с закрытой дорогой. Навигационной системе транспортного средства не нужно осуществлять навигационный маршрут для условия изменения маршрута, удовлетворяемого в этих вариантах осуществления. Если условие изменения маршрута удовлетворено в этих вариантах осуществления, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, который исключает закрытую дорогу, к которой направляется транспортное средство, (любым из способов, описанных выше) и активирует навигационную систему для предупреждения водителя о том, что дорога закрыта и предложения альтернативного навигационного маршрута.
[0041] В альтернативных вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, когда: (1) навигационная система транспортного средства осуществляет навигационный маршрут, и (2) система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что дорога этого осуществляемого в настоящее время навигационного маршрута проходит через зону строительства. Иными словами, в этих вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, когда навигационная система транспортного средства будет направлять водителя для движения по или на дорогу, которая строится. Если условие изменения маршрута удовлетворено в этих вариантах осуществления, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, который исключает зону строительства, через которую проходит осуществляемый в настоящее время навигационный маршрут, (любым из способов, описанных выше) и осуществляет альтернативный навигационный маршрут (любым из способов, описанных выше).
[0042] В альтернативных вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие изменения маршрута удовлетворено, когда система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что транспортное средство скорее всего пройдет через зону строительства, основываясь на текущей траектории транспортного средства. Иными словами, в этих вариантах осуществления система управления транспортным средством на основе камеры прогнозирует, где транспортное средство будет продвигаться, и определяет, что условие изменения маршрута удовлетворено, когда траектория транспортного средства будет пересекаться с зоной строительства. Навигационной системе транспортного средства не нужно осуществлять навигационный маршрут для условия изменения маршрута, удовлетворяемого в этих вариантах осуществления. Если условие изменения маршрута удовлетворено в этих вариантах осуществления, система управления транспортным средством на основе камеры определяет альтернативный навигационный маршрут, который исключает зону строительства, к которой направляется транспортное средство, (любым из способов, описанных выше) и активирует навигационную систему для предупреждения водителя о зоне строительства и предложения альтернативного навигационного маршрута.
Условие опасности
[0043] Как отмечено выше, когда система управления транспортным средством на основе камеры определяет, что условие опасности удовлетворено, основываясь по меньшей мере частично на информации изображения, получаемой от камеры, система управления транспортным средством на основе камеры заставляет устройство вывода транспортного средства выводить предупреждение об опасности для предупреждения водителя об опасности.
[0044] В некоторых вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие опасности удовлетворено, когда система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что опасный объект расположен на дороге вдоль траектории транспортного средства. Иными словами, в этих вариантах осуществления условие опасности удовлетворено, когда система управления транспортным средством на основе камеры определяет, что опасный объект находится на пути транспортного средства.
[0045] Система управления транспортным средством на основе камеры может определять, что объект находится на дороге вдоль траектории транспортного средства любым из множества способов. В различных вариантах осуществления система управления транспортным средством на основе камеры анализирует информацию изображения путем поиска информации изображения для любых объектов (таких как животные, бочки, конусы, куски шин, мусор и т.п.), расположенных на полосе движения транспортного средства (или в других вариантах осуществления в пределах обозначенной близости к полосе движения транспортного средства). Система управления транспортным средством на основе камеры может использовать любое подходящее программное обеспечение или инструмент для обработки изображений, чтобы анализировать информацию изображения.
[0046] Как только система управления транспортным средством на основе камеры определяет, что объект находится на дороге вдоль траектории транспортного средства, система управления транспортным средством на основе камеры определяет, является ли этот объект опасным объектом (таким как корова), который будет удовлетворять условию опасности, или неопасным объектом (таким как пластиковый мешок), который не будет удовлетворять условию опасности. Система управления транспортным средством на основе камеры может определять, является ли объект опасным объектом, любым из множества способов и основываясь на любом из множества факторов. В различных вариантах осуществления система управления транспортным средством на основе камеры делает это путем определения одной или более характеристик объекта и делая перекрестные ссылки характеристик(и) с одной или более характеристиками опасного объекта, включенными в базу данных. Если объект имеет характеристику или набор характеристик опасного объекта, которые соответствуют характеристикам или набору характеристик опасного объекта, система управления транспортным средством на основе камеры обозначает объект как опасный объект, тем самым удовлетворяя условию опасности.
[0047] Характеристики объекта могут быть любыми подходящими характеристиками объекта, такими как (но не ограничиваясь): тип объекта; размер объекта; скорость объекта, ускорение объекта, положение объекта, прогнозируемое перемещение/путь/траектория/положение/местонахождение объекта или тип объекта. Характеристики опасного объекта могут быть любым(и) подходящим(и) поднабором(ами) этих характеристик. Например, в одном варианте осуществления объект, имеющий размер по меньшей мере одну четверть ширины полосы движения транспортного средства, представляет собой опасный объект, объект, имеющий тип объекта животное, представляет собой опасный объект, и объект, имеющий прогнозируемую траекторию по направлению к транспортному средству, представляет собой опасный объект.
[0048] Если система управления транспортным средством на основе камеры определяет, что условие опасности удовлетворено, система управления транспортным средством на основе камеры заставляет одно или более устройств вывода транспортного средства выводить предупреждение об опасности для предупреждения водителя об опасном объекте. Например, система управления транспортным средством на основе камеры может заставлять: громкоговорители транспортного средства выводить звуковое предупреждение об опасности (например, повторяющийся звуковой сигнал или голосовое предупреждение); источник света транспортного средства (например, лампочку на приборной панели) светиться; экран дисплея транспортного средства (например, экран дисплея навигационной системы) отображать текстовое предупреждение; компонент транспортного средства вибрировать или перемещаться (например, заставляет рулевое колесо вибрировать); или их любую подходящую комбинацию. В некоторых вариантах осуществления выходной сигнал увеличивается по интенсивности, когда серьезность опасности увеличивается (например, конус на дороге заставляет лампочку на приборной панели мигать, в то время как олень на дороге заставляет громкоговорители издавать повторяющийся звуковой сигнал и рулевое колесо вибрировать).
[0049] Фигура 5 представляет собой вид сверху транспортного средства 320, которое включает в себя один вариант осуществления системы управления транспортным средством на основе камеры, движущегося по улице 301. Множество бочек 340a-340e зоны строительства размещены вдоль улицы 310. Здесь бочка 340d зоны строительства была перемещена в пределах полосы движения, по которой движется транспортное средство 320. Камера (не показана) системы управления транспортным средством на основе камеры транспортного средства 320 получает информацию изображения, которая включает в себя изображение бочки 340d зоны строительства. Здесь процессор системы управления транспортным средством на основе камеры определяет, что условие опасности удовлетворено, так как бочка 340d зоны строительства, которая относится к типу объекта, обозначенного как опасный объект, расположена в пределах полосы движения транспортного средства. Соответственно, система управления транспортным средством на основе камеры заставляет громкоговорители транспортного средства выводить повторяющийся звуковой сигнал для предупреждения водителя о бочке 340d зоны строительства на полосе движения транспортного средства.
Условие скорости
[0050] Как отмечено выше, когда система управления транспортным средством на основе камеры определяет, что условие скорости удовлетворено, основываясь по меньшей мере частично на информации изображения, получаемой от камеры, система управления транспортным средством на основе камеры изменяет установку скорости транспортного средства.
[0051] В некоторых вариантах осуществления система управления транспортным средством на основе камеры определяет, что условие скорости удовлетворено, когда: (1) система автоматического поддержания скорости движения транспортного средства активна и управляет скоростью транспортного средства согласно установке скорости, и (2) система управления транспортным средством на основе камеры определяет, основываясь на информации изображения, что установка скорости отличается от установленного ограничения скорости. Иными словами, в этих вариантах осуществления условие скорости удовлетворено, когда система управления транспортным средством на основе камеры определяет, что система автоматического поддержания скорости движения транспортного средства активна и установлена на более высокой или более низкой скорости, чем установленное ограничение скорости.
[0052] Система управления транспортным средством на основе камеры может определять установленное ограничение скорости, основываясь на информации изображения, любым из множества способов. В различных вариантах осуществления система управления транспортным средством на основе камеры анализирует информацию изображения путем поиска информации изображения для изображений знаков ограничения скорости. Система управления транспортным средством на основе камеры может использовать любое подходящее программное обеспечение или инструмент для обработки изображений, чтобы анализировать информацию изображения.
[0053] Если условие скорости удовлетворено, система управления транспортным средством на основе камеры изменяет установку скорости системы автоматического поддержания скорости движения транспортного средства для соответствия установленному ограничению скорости.
[0054] Возвращаясь к Фигуре 5, знак 330 ограничения скорости в зоне строительства установлен вдоль обочины дороги 301. Камера (не показана) системы управления транспортным средством на основе камеры транспортного средства 320 получала информацию изображения, которая включала изображение знака 330 ограничения скорости в зоне строительства. Здесь процессор системы управления транспортным средством на основе камеры определял, основываясь на знаке 330 ограничения скорости в зоне строительства, что установленное ограничение скорости составляет 45 миль в час (72,4 км/ч), и определял, что условие скорости было удовлетворено, так как система автоматического поддержания скорости движения транспортного средства 320 была активна и управляла скоростью транспортного средства в соответствии с установкой скорости на 65 миль в час (104,6 км/ч). Соответственно, система управления транспортным средством на основе камеры снижала установку скорости системы автоматического поддержания скорости движения транспортного средства с 65 миль в час (104,6 км/ч) до 45 миль в час (72,4 км/ч) для соответствия указанному заново установленному ограничению скорости в зоне строительства.
[0055] В некоторых вариантах осуществления, когда система управления транспортным средством на основе камеры определяет, что условие скорости удовлетворено, система управления транспортным средством на основе камеры автоматически изменяет установку скорости транспортного средства без ввода данных водителем. В других вариантах осуществления, когда система управления транспортным средством на основе камеры определяет, что условие скорости удовлетворено, система управления транспортным средством на основе камеры запрашивает водителя, например через отображаемое указание и/или звуковое указание, желает ли водитель, чтобы система управления транспортным средством на основе камеры изменяла установку скорости транспортного средства, и позволяет водителю вводить водительские инструкции. Система управления транспортным средством на основе камеры изменяет установку скорости транспортного средства только после получения водительских инструкций, чтобы сделать это.
Варианты
[0056] В некоторых вариантах осуществления вместо того, чтобы полагаться исключительно на информацию изображения для определения того, удовлетворено ли какое-либо из условия изменения маршрута, условия опасности и условия скорости, система управления транспортным средством на основе камеры также использует информацию, получаемую от одного или более датчиков транспортного средства, для определения того, удовлетворено ли какое-либо из этих условий.
[0057] Например, транспортное средство может включать в себя и система управления транспортным средством на основе камеры может быть выполнена с возможностью связи с одним или более датчиками, такими как радиолокационный датчик, инфракрасный датчик и/или ультразвуковой датчик. Система управления транспортным средством на основе камеры может получать информацию или данные от одного или более из этих датчиков. Система управления транспортным средством на основе камеры может затем использовать эту информацию для определения того, удовлетворено ли какое-либо из условий.
Компоненты системы управления транспортным средством на основе камеры
[0058] Фигура 6 иллюстрирует один примерный вариант осуществления системы 400 управления транспортным средством на основе камеры. Другие варианты осуществления системы управления транспортным средством на основе камеры могут включать в себя другие, меньшее количество или дополнительные компоненты, чем описанные ниже и показанные на Фигуре 6.
[0059] Система 400 управления транспортным средством на основе камеры включает в себя контроллер 410, содержащий по меньшей мере один процессор 411, находящийся в сообщении с основным запоминающим устройством 412, которое хранит набор инструкций 413. Процессор 411 выполнен с возможностью связи с основным запоминающим устройством 412, доступа к набору инструкций 413 и осуществления набора инструкций 413, чтобы заставлять систему 400 управления транспортным средством на основе камеры выполнять любой из способов, процессов и признаков, описанных здесь. Система 400 управления транспортным средством на основе камеры также включает в себя камеру 414 (описанную выше), находящуюся в сообщении с контроллером 410, и интерфейс 415 связи, находящийся в сообщении с контроллером 410.
[0060] Процессор 411 может быть любым подходящим устройством обработки или набором устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема или одна или более интегральных схем специального назначения (ASICs), выполненных с возможностью осуществления набора инструкций 413. Основное запоминающее устройство 412 может быть любым подходящим запоминающим устройством, таким как, но не ограничиваясь: энергозависимое запоминающее устройство (например, RAM, которое может включать в себя энергонезависимое RAM, магнитное RAM, сегнетоэлектрическое RAM и любые другие подходящие формы); энергонезависимое запоминающее устройство (например, дисковое запоминающее устройство, флэш-память, EPROMs, EEPROMs, энергонезависимое твердотельное запоминающее устройство на основе мемристоров и т.д.); неизменяемое запоминающее устройство (например, EPROMs); и/или постоянное запоминающее устройство.
[0061] Система 400 управления транспортным средством на основе камеры включает в себя интерфейс 415 связи. Интерфейс 415 связи содержит проводной и/или беспроводной сетевой интерфейс для обеспечения связи с внешней сетью 440. Внешняя сеть 440 может быть совокупностью одной или более сетей, включающих в себя основанные на стандартах сети (например, 2G, 3G, 4G, Универсальная Мобильная Телекоммуникационная Система (UMTS), ассоциация GSM (R), стандарт "долговременное развитие" (LTE) (TM) или более); WiMAX; Bluetooth; технологию "коммуникации ближнего поля" (NFC); WiFi (включающий в себя 802.11 a/b/g/n/ac или другие); WiGig; сети системы глобального позиционирования (GPS); и другие, доступные во время подачи этой заявки, или которые могут быть разработаны в будущем. Дополнительно, внешняя(ие) сеть(и) может(могут) быть публичной сетью, такой как Интернет; частной сетью, такой как интранет; или их комбинациями, и могут использовать множество сетевых протоколов, доступных сейчас или которые будут разработаны позже, включающих в себя, но не ограничиваясь, сетевые протоколы на основе TCP/IP.
[0062] В некоторых вариантах осуществления набор инструкций 413, хранящихся на основном запоминающем устройстве 412, и которые являются выполняемыми для обеспечения функциональных возможностей системы управления транспортным средством на основе камеры, могут быть загружены с внешнего сервера через внешнюю сеть 440. Дополнительно, в некоторых вариантах осуществления система 400 управления транспортным средством на основе камеры может связываться с центральным командным сервером через внешнюю сеть 440. Например, система 400 управления транспортным средством на основе камеры может сообщать информацию изображения, получаемую камерой системы 400 управления транспортным средством на основе камеры, центральному командному серверу путем управления интерфейсом 415 связи для передачи информации изображения центральному командному серверу через внешнюю сеть 440. Система 400 управления транспортным средством на основе камеры также может сообщать любые сгенерированные данные центральному командному серверу.
[0063] Система 400 управления транспортным средством на основе камеры выполнена с возможностью связи с множеством компонентов транспортного средства и систем транспортного средства (например, через одну или более шин связи (не показаны)), включающих в себя: одно или более устройств 501 ввода, одно или более устройств 502 вывода, дисковод 505, навигационную систему 508, включающую в себя приемник системы глобального позиционирования (GPS) и выполненную с возможностью взаимодействия с GPS для обеспечения информации, основанной на местоположении, и направлений (как известно в уровне техники), и систему 509 автоматического поддержания скорости движения (которая известна в уровне техники).
[0064] Устройства 501 ввода могут включать в себя любые подходящие устройства ввода, которые позволяют водителю или пассажиру транспортного средства вводить изменения или обновления для информации, на которую ссылается система 400 управления транспортным средством на основе камеры, как описано здесь. Устройства 501 ввода могут включать в себя, например, ручку управления, приборную панель, клавиатуру, сканер, цифровую камеру для захвата изображения и/или распознавания визуальных команд, сенсорный экран, устройство звукового ввода (например, микрофон в салоне), кнопки, мышку или сенсорную панель.
[0065] Устройства вывода могут включать в себя выводы приборного щитка (например, циферблаты, световые устройства), приводы, дисплей 504 (например, жидкокристаллический дисплей («LCD»), дисплей на основе органических светоизлучающих диодов («OLED»), дисплей с плоским экраном, твердотельный дисплей, дисплей на электронно-лучевой трубке («CRT»), или проекционный дисплей) и громкоговорители 503.
[0066] Дисковод 505 выполнен с возможностью приема компьютерно-читаемого носителя 506. В некоторых вариантах осуществления дисковод 505 принимает компьютерно-читаемый носитель 506, на котором один или более наборов инструкций 507, например, программного обеспечения для работы системы 400 управления транспортным средством на основе камеры, могут быть включены. Дополнительно, Инструкции 507 могут воплощать один или более способов или логическую схему, как описано здесь. В конкретном варианте осуществления инструкции 507 могут находиться полностью или по меньшей мере частично в любом одном или нескольких из основного запоминающего устройства 412, компьютерно-читаемого носителя 506 и/или в процессоре 411 при выполнении инструкций процессором 411.
[0067] Хотя компьютерно-читаемый носитель показан как единственный носитель, выражение «компьютерно-читаемый носитель» включает в себя единственный носитель или множество носителей, таких как централизованная или распределенная база данных и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Выражение «компьютерно-читаемый носитель» также включает в себя любой материальный носитель, который имеет возможность хранения, кодирования или передачи набора инструкций для осуществления процессором или которые заставляют компьютерную систему выполнять любой один или более способов или операций, раскрытых здесь.
[0068] Любые описания процессов или блоков на Фигурах следует понимать как представляющие модули, сегменты или части кода, которые включают в себя одну или более выполняемых инструкций для осуществления конкретных логических функций или этапов в процессе, и альтернативные варианты осуществления включены в пределах объема охраны вариантов осуществления, описанных здесь, в которых функции могут быть выполнены в порядке, отличающемся от показанного или обсужденного, включая по существу одновременное выполнение или выполнение в обратном порядке, в зависимости от включенных функциональных возможностей, как будет понятно специалисту в области техники.
[0069] Следует подчеркнуть, что вышеописанные варианты осуществления, в частности любые «предпочтительные» варианты осуществления, являются возможными примерами вариантов осуществления, всего лишь изложенными для ясного понимания принципов изобретения. Многие изменения и модификации могут быть выполнены для вышеописанного(ых) варианта(ов) осуществления, по существу не отступая от сущности и принципов технологий, описанных здесь. Все такие модификации предназначены для включения в настоящее раскрытие в пределах объема охраны этого раскрытия и защищены следующей ниже формулой изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Система связи пассажира и способ управления системой связи пассажира
Виртуальная карта транспортных средств
Система совместно используемых транспортных средств
Система обнаружения нахождения в пределах границ с использованием беспроводных сигналов
Система и способ предупреждения для транспортного средства и транспортное средство
Транспортные средства и система регулирования движения

