Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
Вид РИД
Изобретение
Изобретение относится к области электротехники, а именно к системам управления шаговыми двигателями, в частности, к системам управления биполярными шаговыми двигателями.
Известно устройство для управления шаговым двигателем (патент РФ №2125762 приоритет от 22.07.1997 г., «Устройство для управления шаговым двигателем», автор Стоялов В.В., МПК Н02Р 8/20, опубликовано 27.01.1999 г.), предназначенное для автоматического (микроконтроллера), автономного (с участием оператора) и циклического (от датчиков предельных перемещений) пошагового управления различными дискретными исполнительными механизмами с шаговыми электродвигателями и ограниченным диапазоном перемещения подвижного элемента, содержащее распределитель импульсов, многоканальный усилитель, датчики предельных перемещений, первый и второй мажоритарный элементы, первый и второй электронные переключатели, блок управления режимами работы, блок блокировки распределителя импульсов, блок формирования дискретных импульсов, элемент задержки, ждущий мультивибратор, при этом устройство обеспечивает формирование команд во всех режимах без потери шага и обесточивания фазных обмоток шагового двигателя по завершении импульса управления.
Недостатками данного устройства для управления шаговым двигателем являются: отсутствие возможности наращивания количества данных схем, подключаемых к единому интерфейсу управления; отсутствие возможности регулирования тока в обмотках шагового двигателя.
Наиболее близким по технической сущности является схема привода шагового двигателя (патент РФ №2357354 приоритет от 07.09.2004 г., «Схема привода шагового двигателя и способ управления приводом шагового двигателя», авторы: Суоми Эрик У., Станки Томас М, МПК Н02Р 8/20, опубликовано 27.05.2009 бюл. №15), которая использует процессор, формирующий на выходе сигнал широтно-импульсной модуляции (ШИМ). Схема привода содержит схему Н-моста, имеющую первый и второй входы и схему переключения, имеющую вход и выход. Первый вход Н-моста и вход схемы переключения подключены к выходу сигнала ШИМ процессора, а выход схемы переключения подключен ко второму входу Н-моста. Схема переключения инвертирует коэффициент заполнения ШИМ, когда сигнал ШИМ присутствует, и не инвертирует коэффициент заполнения, когда сигнал ШИМ отсутствует.
Недостатками данной схемы привода шагового двигателя являются: отсутствие возможности наращивания количества данных схем, подключаемых к единому интерфейсу управления; ограниченное использование данных схем при отсутствии ШИМ, так как в данном режиме ток в обмотках шагового двигателя отключается, что не всегда целесообразно.
Технической проблемой является создание устройства для управления шагового двигателя, обладающего расширенными функциональными возможностями, которые позволяют:
- осуществлять управление по интерфейсу CAN;
- подключать несколько данных устройств к интерфейсу CAN;
- иметь несколько режимов работы шагового двигателя и выбирать требуемый режим.
Технический результат, на достижение которого направлено изобретение, заключается в расширении функциональных возможностей.
Данный технический результат достигается тем, что в устройстве для управления шаговым двигателем содержащим, включающий блок памяти микропроцессор, схему переключения, схему привода шагового двигателя, образованную первым и вторым Н-мостами, выходы которых являются выходами устройства для управления шаговым двигателем и предназначены для подключения к соответствующим обмоткам шагового двигателя, новым является то, что дополнительно введены блок стабилизации тока в обмотках шагового двигателя, приемопередатчик интерфейса CAN, интерфейс CAN, вход-выход которого соединен с первым входом-выходом приемопередатчика интерфейса CAN, второй вход-выход которого соединен с входом-выходом микропроцессора, первый, второй, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым, третьим, четвертым и пятым входами схемы переключения, первый, второй, третий и четвертый выходы которой соединены соответственно с первым, вторым, третьим и четвертым входами схемы привода шагового двигателя, первый и второй выходы которой соединены соответственно с первым и вторым входами блока стабилизации тока в обмотках шагового двигателя, третий вход которого является входом управления блока стабилизации тока, а первый и второй выходы соединены соответственно с шестым и седьмым входами схемы переключения, при этом схема переключения содержит, инвертор, первый и второй логические элементы ИЛИ, первый и второй триггеры, первый, второй, третий и четвертый логические элементы И, выходы которых являются соответственно первым, вторым, третьим и четвертым выходами схемы переключения, первые входы первого, второго, третьего и четвертого логических элементов И являются соответственно вторым, третьим, четвертым и пятым входами схемы переключения, а объединенные вторые входы первого и второго логических элементов И и объединенные вторые входы третьего и четвертого логических элементов И соединены соответственно с выходами первого и второго триггеров, первые входы которых объединены и соединены с выходом инвертора, вход которого является первым входом схемы переключения и соединен с первыми входами первого и второго логических элементов ИЛИ, вторые входы которых являются соответственно шестым и седьмым входами схемы переключения, выходы первого и второго логических элементов ИЛИ соединены соответственно со вторыми входами первого и второго триггеров.
Введение приемопередатчика интерфейса CAN позволяет подключить устройство для управления шаговым двигателем к интерфейсу CAN, что позволяет наращивать количество подобных схем до 127 на сегменте интерфейса. Интерфейс CAN позволяет дистанционно управлять работой устройства для управления шаговым двигателем. Использование данной схемы переключения с указанными связями позволяет работать шаговому двигателю в режиме с ШИМ регулированием тока в обмотках и в режиме без регулирования тока в обмотках.
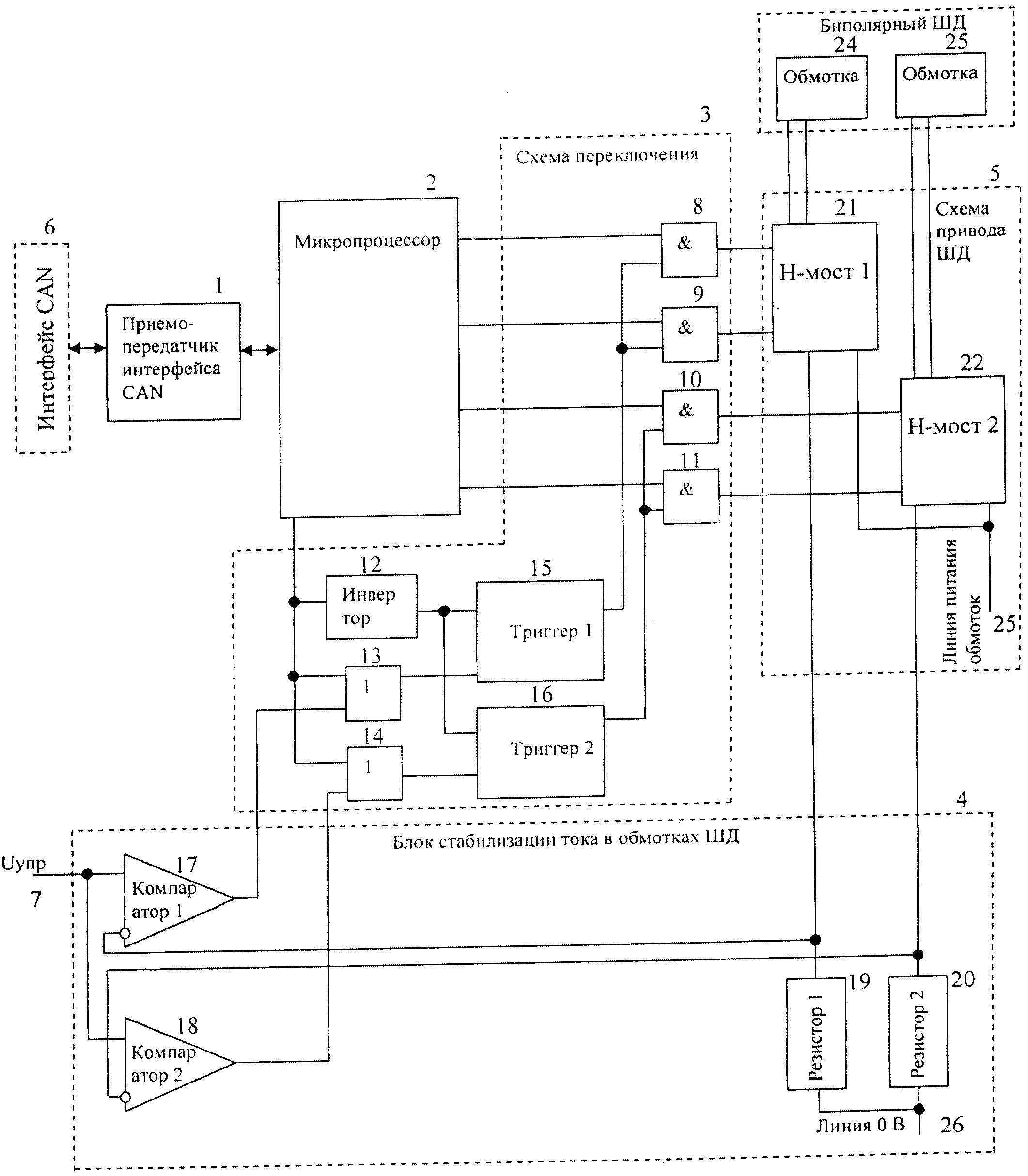
На фигуре приведена схема устройства для управления шаговым двигателем.
Устройство для управления шаговым двигателем содержит приемопередатчик 1 интерфейса CAN, включающий блок памяти микропроцессор 2, схему 3 переключения, блок 4 стабилизации тока в обмотках шагового двигателя, схему 5 привода шагового двигателя, интерфейс CAN 6, вход управления Uупр. 7
Вход-выход интерфейса CAN 6 соединен с первым входом-выходом приемопередатчика 1 интерфейса CAN, второй вход-выход которого соединен с входом-выходом микропроцессора 2. Первый, второй, третий, четвертый и пятый выходы микропроцессора 2 соединены соответственно с первым, вторым, третьим, четвертым и пятым входами схемы 3 переключения, первый, второй, третий и четвертый выходы которой соединены соответственно с первым, вторым, третьим и четвертым входами схемы 5 привода шагового двигателя. Первый и второй выходы схемы 5 привода шагового двигателя соединены соответственно с первым и вторым входами блока 4 стабилизации тока в обмотках шагового двигателя. Третий вход блока 4 стабилизации тока в обмотках шагового двигателя является входом управления Uупр. 7. Первый и второй выходы блока 4 стабилизации тока в обмотках шагового двигателя соединены соответственно с шестым и седьмым входами схемы 3 переключения.
Схема 3 переключения содержит первый 8, второй 9, третий 10 и четвертый 11 логические элементы «И», инвертор 12, первый 13 и второй 14 логические элементы «ИЛИ», первый 15 и второй 16 триггеры. Выходы первого 8, второго 9, третьего 10 и четвертого 11 логических элементов «И» являются соответственно первым, вторым, третьим и четвертым выходами схемы 3 переключения. Первые входы первого 8, второго 9, третьего 10 и четвертого 11 логических элементов «И» являются соответственно вторым третьим, четвертым и пятым входами схемы 3 переключения. Объединенные вторые входы первого 8 и второго 9 логических элементов «И» и объединенные вторые входы третьего 10 и четвертого 11 логических элементов «И» соединены соответственно с выходами первого 15 и второго 16 триггеров. Первые входы первого 15 и второго 16 триггеров объединены и соединены с выходом инвертора 12, вход которого является первым входом схемы 3 переключения и соединен с первыми входами первого 13 и второго 14 логических элементов «ИЛИ», вторые входы которых являются соответственно шестым и седьмым входами схемы 3 переключения. Выходы, первого 13 и второго 14 логических элементов «ИЛИ» соединены соответственно со вторыми входами первого 15 и второго 16 триггеров.
Блок 4 стабилизации тока в обмотках шагового двигателя содержит первый 17 и второй 18 компараторы, первый 19 и второй 20 резисторы, первые выводы которых являются первым и вторым входом блока 4 стабилизации тока в обмотках шагового двигателя и соединены с инвертирующими входами первого 17 и второго 18 компаратора. Не инвертирующие входы компараторов 17, 18 объединены и связаны с входом управления Uупр. 7, который является третьим входом блока 4 стабилизации тока в обмотках шагового двигателя. Выходы компараторов 17, 18 являются первым и вторым выходами блока 4 стабилизации тока в обмотках шагового двигателя. Вторые выводы резисторов 19, 20 объединены и связаны с линией 0 В 26.
Схема 5 привода шагового двигателя образованна первым 21 и вторым 22 Н-мостами, входы которых соединены с линией питания обмоток 23. Выходы первого 21 и второго 22 Н-мостов являются выходами устройства для управления шаговым двигателем и предназначены для подключения к соответствующим обмоткам 24, 25.
Приемопередатчик 1 интерфейса CAN может быть выполнен на микросхеме 5559ИН14АУ. Вход-выход интерфейса CAN 6 должен обеспечивать канал последовательной передачи данных, реализованный в соответствии со стандартом ISO 11898-1:2003.
Микропроцессор 2 с блоком памяти (на фигуре не показан) может быть выполнен на микросхеме 1986 ВЕ93У.
Схема 3 переключения может быть построена на микросхемах серии 1594.
Блок 4 стабилизации тока в обмотках шагового двигателя, и схема 5 привода шагового двигателя с двумя Н-мостами могут быть построены по известным схемам, описанным в журнале "Основы схемотехники", №6-7/2001. Автор - Л. Ридико.
В качестве биполярного шагового двигателя (обмотки 24,25) возможно использовать двигатель типа 5ДШМ-20/5-0.06-2 с двумя обмотками.
Устройство для управления шаговым двигателем работает следующим образом.
После включения микропроцессор 2 через приемопередатчик 1 интерфейса CAN проводит информационный обмен по интерфейсу CAN 6 с устройствами (на фигуре не показаны), подключенными также к данному интерфейсу 6 и выбирает режим работы шагового двигателя, например: направление движения вала двигателя (вперед, назад); количество шагов; полношаговый режим или полушаговый режим; со стабилизацией тока или без; скорость вращения вала (вал на рисунке не показан). На интерфейсе CAN 6 одновременно могут находиться и работать до 127 устройств для управления шаговым двигателем с разными идентификаторами, хранящимися в памяти микропроцессора 2.
При отсутствии информационного обмена по интерфейсу CAN 6 микропроцессор 2 может выбрать автономный режим работы по хранящейся в памяти микропроцессора 2 программе.
При режиме работы шагового двигателя без регулирования тока в обмотках 24, 25 микропроцессор 2 формирует сигнал с уровнем логической «1» по первому выходу. Данный сигнал поступает на первый вход схемы переключения 3 и на вход инвертора 12 и первые входы элементов «ИЛИ» 13, 14. При сигнале с уровнем логической «1» на первых входах элементов «ИЛИ» 13, 14 сигналы на их вторых входах, которые поступают с первого и второго выхода блока 4 стабилизации тока в обмотках шагового двигателя не влияют на работу схемы переключения 3. Выходной сигнал с инвертора 12, поступает на первые объединенные входы триггеров 15, 16, выходные сигналы с элементов «ИЛИ» 13, 14 поступают на соответствующие вторые входы триггеров 15, 16. При такой комбинации сигналов на выходах триггеров 15, 16 в схеме 3 переключения формируются сигналы с уровнем логической «1». В результате сигналы по второму, третьему, четвертому, пятому выходам микропроцессора 2 проходят без изменений логических уровней через второй, третий, четвертый и пятый входы схемы переключения 3 на первые входы логических элементов «И» 8, 9, 10, 11 и поступают на первый, второй, третий, четвертый выходы схемы 3 переключения и поступают на первый, второй, третий, четвертый входы схемы 5 привода шагового двигателя, которая с помощью двух Н-мостов 21, 22 управляет напряжением на обмотках шагового двигателя. Частота и параметры импульсов по второму, третьему, четвертому, пятому выходам микропроцессора 2 определяют скорость и направление вращение вала, время нарастания тока до максимального в обмотках 24, 25 шагового двигателя, которое должно быть достаточно для поворота вала, при этом максимальный ток может быть выбран оптимально исходя из необходимости экономии электроэнергии для питания обмоток 24, 25 шагового двигателя.
При режиме работы шагового двигателя с ШИМ регулированием тока в обмотках, микропроцессор 2 выдает на первый выход сигнал с частотой приблизительно равной 40 кГц и длительностью уровня логической «1» приблизительно равной 5 мкс и длительностью уровня логического «0» приблизительно равной 20 мкс. Когда микропроцессор 2 выдает на первый выход сигнал с уровнем логической «1» работа устройства для управления шаговым двигателем аналогична работе в режиме без регулирования тока в обмотках 24, 25 шагового двигателя. Сигнал с первого выхода микропроцессора 2 с уровнем логического «0» подается на первый вход схемы 3 переключения, в которой поступает на первые входы элементов «ИЛИ» 13, 14 и вход инвертора 12 выход которого соединен с объединенными первыми входами триггеров. При превышении тока в обмотках 24, 25 шагового двигателя выше заданного уровня, который определяется сигналом на входе управления Uупр.7 блока 4 стабилизации тока в обмотках шагового двигателя и сигналами с резисторов 19, 20, являющихся датчиками тока в обмотках 24, 25, на первом и втором выходах блока 4 стабилизации тока в обмотках шагового двигателя компараторами 17 и 18 создаются сигналы с уровнями логического «0», которые поступают на шестой и седьмой входы схемы 3 переключения, где поступают на вторые входы элементов «ИЛИ» 13, 14, с выходов которых сигналы с уровнем логического «0» поступают на соответствующие входы триггеров 15, 16. При такой комбинации входных сигналов триггеры 15 и 16 выдают на выходе сигналы с уровнем логического «0», которые поступают на объединенные вторые входы логических элементов «И» 8, 9 и 10, 11 соответственно и формируют сигналы логического «0» на выходах логических элементов «И» 8, 9, 10, И, которые являются первым, вторым, третьим, четвертым выходами схемы 3 переключения, сигналы с которой поступают на соответствующие входы схемы 5 привода шагового двигателя на два Н-моста 21, 22, которые снимают напряжение с обмоток 24, 25 шагового двигателя. В результате ток в обмотках 24, 25 шагового двигателя снижается до уровня приводящего к переключению компараторов 17, 18 в блоке 4 стабилизации тока в обмотках шагового двигателя, на выходах которых появляется сигнал логической «1». Данный сигнал переключает триггеры 15, 16 на выходах которых появляются сигналы с уровнем логической «1» которые поступают на объединенные вторые входы логических элементов «И» 8, 9 и 10, 11 соответственно. Сигналы по второхму, третьему, четвертому, пятому выходам микропроцессора 2 проходят без изменений логических уровней через второй, третий, четвертый и пятый входы схемы переключения 3 на первые входы логических элементов «И» 8, 9, 10, 11 и поступают на первый, второй, третий, четвертый выходы схемы 3 переключения и поступают на первый, второй, третий, четвертый входы схемы 5 привода шагового двигателя, которая с помощью двух Н-мостов 21, 22 управляет напряжением на обмотках шагового двигателя. При появлении напряжения на обмотках 24, 25 шагового двигателя ток в обмотках растет до уровня приводящего к переключению компараторов 17, 18 в блоке 4 стабилизации тока в обмотках шагового двигателя, на выходах которых появляется сигнал логической «0» и процесс повторяется. В результате на первом, втором, третьем, четвертом выходах схемы 3 переключения формируется сигнал ШИМ, который стабилизирует ток в обмотках 24, 25 шагового двигателя. Параметры сигнала по первому выходу микропроцессора 2 определяют длительность ограничения тока в обмотках 24, 25 шагового двигателя, сигналы со второго, третьего, четвертого, пятого выходов микропроцессора 2, определяют скорость и направление вращение вала шагового двигателя.
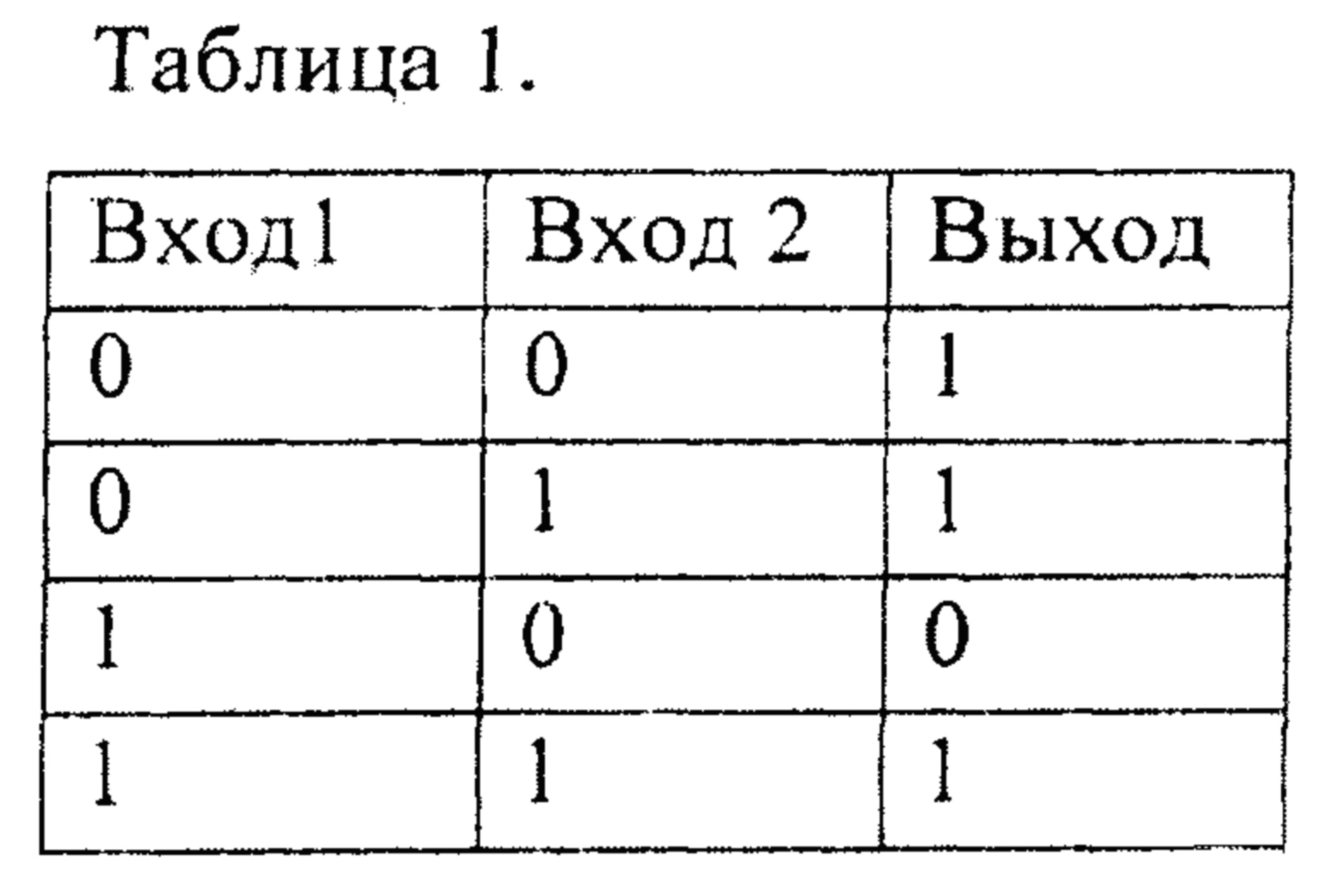
При описании работы устройства для управления шаговым двигателем принималась работа триггеров 15 и 16 в соответствии с таблицей 1.
Частота и параметры сигналов по всем выходам микропроцессора 2 должны выбираться исходя из оптимальной работы конкретного шагового двигателя (с учетом уменьшения шума, потребления, обеспечения необходимого момента угла поворота).
Устройство для управления шаговым двигателем, содержащее включающий блок памяти микропроцессор, схему переключения, схему привода шагового двигателя, образованную первым и вторым Н-мостами, выходы которых являются выходами устройства для управления шаговым двигателем и предназначены для подключения к соответствующим обмоткам шагового двигателя, отличающееся тем, что дополнительно введены блок стабилизации тока в обмотках шагового двигателя, приемопередатчик интерфейса CAN, интерфейс CAN, первый вход-выход которого соединен с первым входом-выходом приемопередатчика интерфейса CAN, второй вход-выход которого соединен с входом-выходом микропроцессора, первый, второй, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым, третьим, четвертым и пятым входами схемы переключения, первый, второй, третий и четвертый выходы которой соединены соответственно с первым, вторым, третьим и четвертым входами схемы привода шагового двигателя, первый и второй выходы которой соединены соответственно с первым и вторым входами блока стабилизации тока в обмотках шагового двигателя, третий вход которого является входом управления блока стабилизации тока, а первый и второй выходы соединены соответственно с шестым и седьмым входами схемы переключения, при этом схема переключения содержит инвертор, первый и второй логические элементы ИЛИ, первый и второй триггеры, первый, второй, третий и четвертый логические элементы И, выходы которых являются соответственно первым, вторым, третьим и четвертым выходами схемы переключения, первые входы первого, второго, третьего и четвертого логических элементов И являются соответственно вторым третьим, четвертым и пятым входами схемы переключения, а объединенные вторые входы первого и второго логических элементов И и объединенные вторые входы третьего и четвертого логических элементов И соединены соответственно с выходами первого и второго триггеров, первые входы которых объединены и соединены с выходом инвертора, вход которого является первым входом схемы переключения и соединен с первыми входами первого и второго логических элементов ИЛИ, вторые входы которых являются соответственно шестым и седьмым входами схемы переключения, выходы первого и второго логических элементов ИЛИ соединены соответственно со вторыми входами первого и второго триггеров.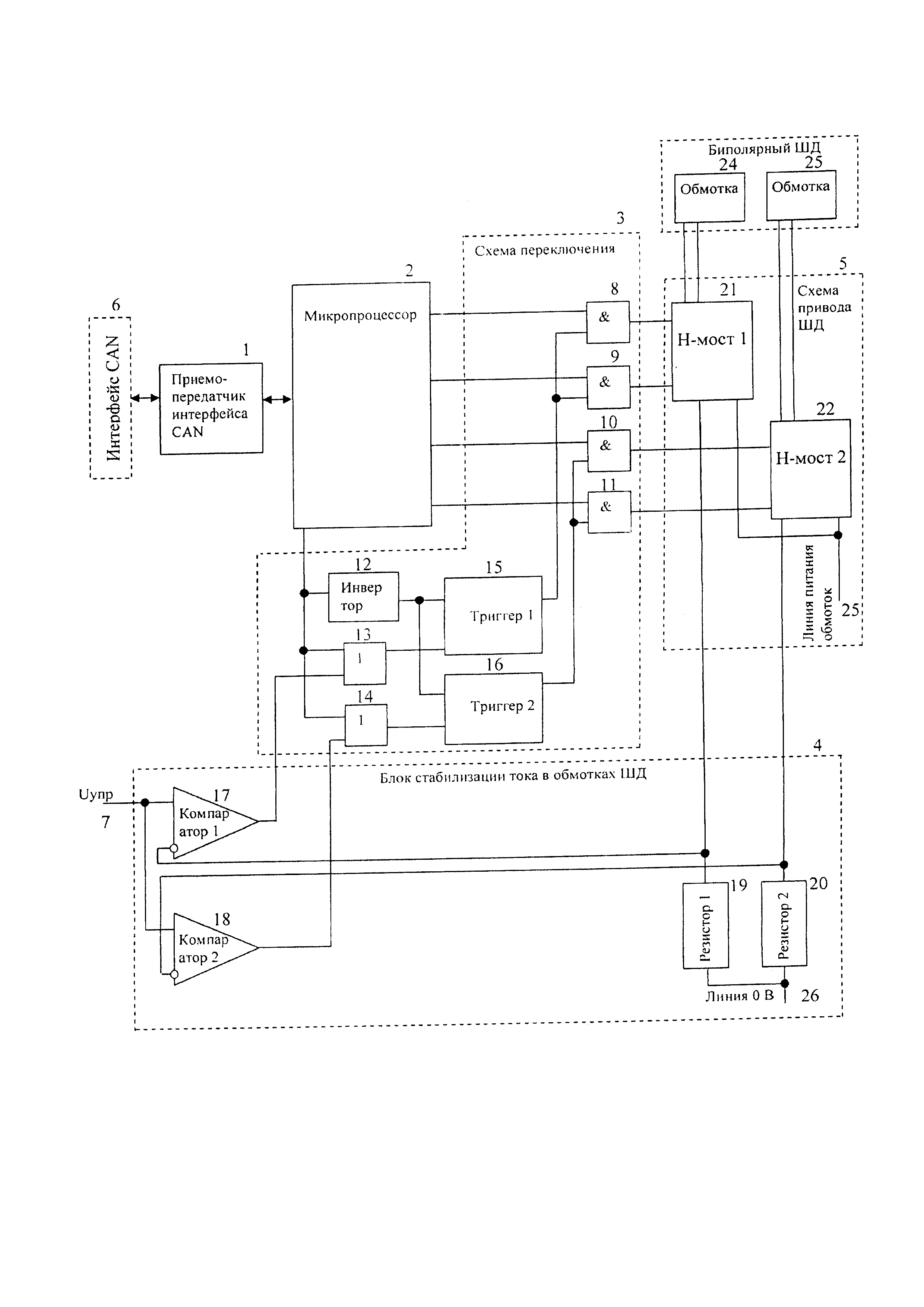
Ударный пневмоцилиндр
Канал технологический совмещенный для промышленной ядерной установки
Способ определения угловой скорости вращения объекта, стабилизированного вращением
Многоканальный рельсовый разрядник
Устройство крепления концентричных кольцевых тепловыделяющих элементов в тепловыделяющей сборке
Оптическая усилительная головка с контротражателем диодной накачки
Квантрон твердотельного лазера с термостабилизацией диодной накачки
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения
Бронезащита
Датчик углового положения
Устройство контроля работы генератора
Устройство для формирования установочного импульса
Защитное устройство
Понижающий конденсаторный преобразователь напряжения
Одновибратор
Электронный взрыватель
Автоматизированная система контроля электрических величин электронной аппаратуры
Автоматизированная система контроля электрических величин электронной аппаратуры

