Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДАВЛЕНИЕМ И ГАЗОВОЙ СМЕСЬЮ ДЛЯ НЕИНВАЗИВНОЙ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ
Вид РИД
Изобретение
[001] Настоящее изобретение в целом относится к способам и системам для точного управления давлением и газовой смесью в системе для искусственной вентиляции легких.
УРОВЕНЬ ТЕХНИКИ
[002] Наиболее распространенные средства обеспечения интенсивной терапии с искусственной вентиляцией легких требуют интубации пациентов посредством эндотрахеальной трубки, которую герметичным образом помещают в трахее посредством надувной манжеты. Интубация представляет собой наилучшее средство для работы с дыхательными путями в клинических условиях и поддержания наполнения легких воздухом, однако она создает значительные риски, в том числе истирание тканей, инфицирование и поверхностный наркоз пациента ввиду высокого уровня дискомфорта. Следовательно, интубацию закономерно называют инвазивной искусственной вентиляцией легких, при этом принятие решения лечащим персоналом об интубации должно быть тщательно обдумано. Для отдельной группы госпитализированных пациентов, нуждающихся в поддержке дыхания, риски, приводящие к неблагоприятным побочным эффектам интубации, могут перевесить преимущества.
[003] В свете значительных рисков инвазивной искусственной вентиляции легких был разработан альтернативный подход, основанный на искусственной вентиляции легких, проводимой на дому, который обеспечивает преимущество, заключающееся в поддержании через дыхательные пути, однако использует соединение с помощью маски, размещаемой на рту и носу пациента, или трахеостомической трубки. Этот подход называется неинвазивной искусственной вентиляцией легких с положительным давлением или просто неинвазивной искусственной вентиляцией легких (НИВЛ). При неинвазивной искусственной вентиляции легких возможна некоторая утечка, которую зачастую намеренно применяют для уменьшения количества СО2 в конце спокойного выдоха, который в противном случае пациент бы вдохнул повторно, поскольку в неинвазивной системе искусственной вентиляции легких устройство для искусственной вентиляции легких соединяется с маской посредством одной одноконтурной схемы. По сравнению с этим, при инвазивной искусственной вентиляции легких используют соединительную схему с двумя контурами, которая отдельно переносит выдыхаемые газы, что предотвращает повторный вдох CO2 при инвазивной искусственной вентиляции легких, и, следовательно, не требует обеспечения утечки.
[004] При неинвазивной искусственной вентиляции легких пациентов, требующих проведения интенсивной терапии, обычно используют комбинацию нагнетателя воздуха в качестве источника воздуха окружающей среды и пропорционального клапана в качестве источника сжатого кислорода для управления давлением и газовой смесью (т.е. процентной концентрацией кислорода) во время дыхания. В некоторых конструкциях пропорциональный клапан вводит чистый кислород в область низкого давления или впускную сторону нагнетателя воздуха, так что управление потоком нагнетателя воздуха полностью генерирует давление для подачи воздуха, тогда как в других конструкциях пропорциональный клапан вводит газ в область высокого давления или выпускную сторону нагнетателя воздуха. В последнем случае, как устройство для искусственной вентиляции легких, так и пропорциональный клапан создают давление. Однако координирование устройства для искусственной вентиляции легких со средствами управления пропорциональным клапаном для достижения определенного и точного давления и смеси включает в себя множество проблем. Например, время отклика нагнетаемого воздушного потока обычно намного меньше, чем время отклика клапана, поскольку инерция нагнетателя воздуха требует времени для ускорения. Медленный отклик самого нагнетателя воздуха влияет на время отклика давления в целом, однако несоответствие в динамике потока между нагнетателем воздуха и клапаном делает управление давлением и смесью чрезвычайно проблематичным. Кроме того, несмотря на то, что при неинвазивной искусственной вентиляции легких предусмотрена линия измерения проксимального давления, использование этого давления в качестве источника для управления вызывает значительную задержку в контуре обратной связи. Непосредственное замыкание контура между измеренным проксимальным давлением, при обеспечении более точного постоянного давления в дыхательных путях пациента, ограничивает скорость, с которой могут происходить изменения давления, ввиду устойчивости. Хотя контур скорости нагнетателя воздуха может способствовать улучшению реагирования, при низком потоке присутствует низкая скорость, при этом показания тахометра для измерений на эффекте Холла исключаются. Может быть использована скорость, управляемая аналого-цифровым преобразователем, однако это снижает надежность системы нагнетателя воздуха и увеличивает затраты.
[005] В существующих системах также возникают проблемы, связанные с влиянием возмущений, что также должно быть учтено в рамках конструкции для обеспечения того, чтобы элементы управления следовали желаемому целевому давлению, несмотря на возникающие возмущения, и чтобы элементы управления ослабляли, а не усиливали эти возмущения. Источниками возмущений при неинвазивной искусственной вентиляции легких являются, например: (a) возмущение потока от пациента; (b) нарушение соединения с пациентом, такие как утечки и частичное закупоривание; и, среди прочего, (c) возмущение крутящего момента подшипников двигателя нагнетателя воздуха и нагрузка от аэродинамического давления. Подобным образом, выдыхаемый пациентом газ может проходить через нагнетатель воздуха к источнику воздуха окружающей среды, может предварительно загрузить подводящий путь нагнетателя воздуха газом, обогащенным кислородом. Последующий повторный вдох газа вводит дополнительный кислород выше желаемого заданного значения, в дальнейшем делая управление составом газовой смеси проблематичным.
[006] Кроме того, в устройствах для управления устройством для искусственной вентиляции легких часто применяют пропорционально интегрально дифференцирующие («ПИД») компенсаторы для стабилизации и придания формы переходному отклику. Хотя изменения в динамике давления пациента могут привести к перегрузке при использовании ПИД-компенсатора, причиной перегрузки может быть сама архитектура ПИД-компенсатора, поскольку она использует две пары действительных нулей или комплексных нулей в конструкции, которые вносят вклад во влияние на отклик замкнутого контура.
[007] Следовательно, в уровне техники существует необходимость в системах для неинвазивной искусственной вентиляции легких, которые более точно управляют давлением и составом газовой смеси устойчивым образом, избегая при этом многих проблем, с которыми сталкиваются в известных конструкциях устройств для неинвазивной искусственной вентиляции легких.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[008] Настоящее изобретение относится к инновационным способам и системам для управления давлением и газовой смесью в системе для неинвазивной искусственной вентиляции легких. Различные варианты реализации и варианты осуществления, раскрытые в настоящем документе, направлены на систему для неинвазивной искусственной вентиляции легких, которая управляет давлением нагнетателя воздуха с использованием многоуровневой архитектуры каскадной обратной связи. Для архитектуры обратной связи используют дополнительный фильтр, в которой фильтр объединяет сигналы машинного давления и сигналы проксимального давления в единый сигнал для обратной связи. Кроме того, система для неинвазивной искусственной вентиляции легких содержит контроллер смеси, использующий устройство для оценки смеси и определяющий отдельно траекторию потока для сервосигнала пропорционального клапана потока кислорода с целью обеспечения быстрого и точного управления газовой смесью, не действующего в роли возмущающего воздействия на работу системы управления давлением нагнетателя воздуха. Кроме того, система для неинвазивной искусственной вентиляции легких содержит контроллер скорости, в котором используется устройство для наблюдения за скоростью двигателя, основанное на модели, для дополнения показаний скорости с тахометра при низкой скорости.
[009] В целом, в одном аспекте предложено устройство для искусственной вентиляции легких для управления давлением и газовой смесью в потоке воздуха. Устройство для искусственной вентиляции легких содержит:
(i) источник газа;
(ii) пропорциональный клапан, выполненный с возможностью управления расходом газа из источника газа;
(iii) контроллер смеси, сообщающийся с пропорциональным клапаном и выполненный с возможностью мониторинга потока газа, проходящего через пропорциональный клапан, а также выполненный с возможностью управления процентным содержанием кислорода в потоке воздуха;
(iv) двигатель нагнетателя воздуха и
(v) контроллер двигателя нагнетателя воздуха, выполненный с возможностью управления скоростью двигателя нагнетателя воздуха с использованием контура обратной связи скорости нагнетателя воздуха, контура обратной связи потока и контура обратной связи давления.
[0010] В соответствии с вариантом реализации, контроллер смеси и контроллер нагнетателя воздуха выполнены с возможностью совместного управления выходным потоком.
[0011] В соответствии с вариантом реализации, контур обратной связи скорости нагнетателя воздуха выполнен с возможностью линеаризации управления скоростью двигателя нагнетателя воздуха и обеспечения ограничений высокой скорости нагнетателя воздуха без перегрузки или выключения.
[0012] В соответствии с вариантом реализации, контур обратной связи потока выполнен с возможностью минимизации любого возмущения потока газа в устройстве для искусственной вентиляции легких относительно целевого потока, управляемого контроллером давления.
[0013] В соответствии с вариантом реализации, контур обратной связи давления выполнен с возможностью отслеживания траектории приложенного давления.
[0014] В соответствии с вариантом реализации, устройство для искусственной вентиляции легких дополнительно содержит псевдодифференциальный компенсатор, предназначенный для исключения перегрузки требуемой траектории, вызванной компенсатором.
[0015] В соответствии с вариантом реализации, контроллер давления содержит дополнительный фильтр, выполненный с возможностью объединения сигнала машинного давления и сигнала проксимального давления в единый сигнал для контроллера.
[0016] В соответствии с вариантом реализации, устройство для искусственной вентиляции легких дополнительно содержит контроллер скорости, выполненный с возможностью управления скоростью двигателя нагнетателя воздуха.
[0017] В целом, в одном аспекте предложено устройство для искусственной вентиляции легких. Устройство для искусственной вентиляции легких содержит:
(i) контроллер двигателя нагнетателя воздуха, выполненный с возможностью управления электрическим током, поступающим на двигатель нагнетателя воздуха, с использованием контура обратной связи электрического тока, контура обратной связи скорости нагнетателя воздуха, контура обратной связи потока и контура обратной связи давления, а также содержащий дополнительный фильтр, выполненный с возможностью объединения сигнала машинного давления и сигнала проксимального давления в единый сигнал обратной связи для контроллера давления;
(ii) контроллер смеси, выполненный с возможностью мониторинга потока газа, проходящего через пропорциональный клапан, и газа, поступившего от нагнетателя воздуха, и дополнительно выполненный с возможностью управления процентным содержанием кислорода в потоке воздуха, подаваемом пациенту; и
(iii) контроллер скорости, выполненный с возможностью управления скоростью потока воздуха.
[0018] В целом, в одном аспекте предложен способ управления давлением и газовой смесью выходящего потока газа, включающий следующие этапы:
(i) обеспечение устройства для искусственной вентиляции легких, содержащего источник газа, пропорциональный клапан, выполненный с возможностью управления скоростью потока газа из источника газа, контролер смеси, сообщающийся с пропорциональным клапаном, датчик потока нагнетателя воздуха, двигатель нагнетателя воздуха и контроллер давления, при этом контроллер давления содержит контроллер потока и контроллер скорости;
(ii) активация двигателя нагнетателя воздуха и открытие пропорционального клапана для создания потока и давления в устройстве для искусственной вентиляции легких;
(iii) управление, посредством контроллера давления, скоростью двигателя нагнетателя воздуха с использованием контура обратной связи скорости нагнетателя воздуха, контура обратной связи потока и контура обратной связи давления;
(iv) мониторинг потока, проходящего через устройство для искусственной вентиляции легких, с использованием контроллера смеси и
(v) регулирование потока, проходящего через пропорциональный клапан, с использованием контроллера смеси для обеспечения управления газовой смесью.
[0019] В соответствии с вариантом реализации, способ дополнительно включает этап регулирования, посредством контроллера двигателя нагнетателя воздуха, скорости двигателя нагнетателя воздуха на основе обратной связи измеренной скорости.
[0020] В соответствии с вариантом реализации, способ дополнительно включает этапы: мониторинга скорости нагнетателя с использованием контроллера скорости и регулирования скорости нагнетателя воздуха с использованием контроллера скорости.
[0021] В соответствии с вариантом реализации, устройство для искусственной вентиляции легких дополнительно содержит дополнительный фильтр, выполненный с возможностью объединения сигнала машинного давления и сигнала проксимального давления в единый сигнал для контроллера давления.
[0022] Следует понимать, что все комбинации вышеизложенных замыслов и дополнительных замыслов, описанных более подробно ниже (при условии, что такие замыслы не являются взаимно несовместимыми) рассматриваются как часть объекта изобретения, описанного в настоящем документе. В частности, все комбинации заявленного объекта изобретения, представленные в конце этого описания, следует рассматривать как часть объекта изобретения, описанного в настоящем документе.
[0023] Эти и другие аспекты изобретения станут очевидны и будут разъяснены со ссылкой на вариант(ы) реализации, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] На чертежах одинаковые ссылочные обозначения по существу относятся к одним и тем же частям на разных видах. Кроме того, чертежи не подлежат масштабированию, напротив, акцент следует делать на иллюстрации принципов изобретения в целом.
[0025] Фиг. 1 представляет собой схематический вид системы для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0026] Фиг. 2 представляет собой схематический вид системы пропорционального клапана управления потоком, в соответствии с вариантом реализации.
[0027] Фиг. 3 представляет собой схематический вид системы для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0028] Фиг. 4 представляет собой блок-схему последовательности операций способа управления давлением и газовой смесью в системе для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0029] Фиг. 5 представляет собой схематический вид системы управления давлением нагнетателя воздуха для системы для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0030] Фиг. 6 представляет собой схематический вид модели компенсатора контура управления давлением нагнетателя воздуха устройства для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0031] Фиг. 7 представляет собой схематический вид модели компенсатора контура потока нагнетателя воздуха устройства для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0032] Фиг. 8 представляет собой схематический вид модели компенсатора контура скорости нагнетателя воздуха устройства для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0033] Фиг. 9 представляет собой схематический вид контроллера газовой смеси устройства для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0034] Фиг. 10 представляет собой схематический вид устройства для оценки смеси контроллера устройства для неинвазивной искусственной вентиляции легких, в соответствии с вариантом реализации.
[0035] Фиг. 11 представляет собой схематический вид последовательной логической схемы повторного вдоха, в соответствии с вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0036] В настоящем раскрытии описаны различные варианты реализации системы для искусственной вентиляции легких и способа. В более общем смысле, Заявитель признал и принял во внимание, что было бы полезно создать систему для неинвазивной искусственной вентиляции легких, которая позволяет осуществлять точное измерение, регулирование и управление давлением и составом газовой смеси. Например, в способе и системе для неинвазивной искусственной вентиляции легких используют многоуровневое управление каскадной обратной связью для управления давлением нагнетателя воздуха. Для архитектуры обратной связи используют дополнительный фильтр, при этом фильтр объединяет сигналы машинного давления и проксимального давления в единый сигнал для обратной связи. Кроме того, система содержит контроллер смеси, содержащий устройство для оценки смеси, при этом контроллер смеси отдельно определяет траекторию потока для сервосигнала пропорционального клапана потока кислорода с целью обеспечения быстрого и точного управления смесью. Кроме того, система содержит контроллер скорости, в котором используется устройство для наблюдения за скоростью двигателя, основанное на модели, для дополнения показаний скорости с тахометра при низкой скорости. Способ и система в результате обеспечивают более точное управление как давлением, так и составом газовой смеси в устройстве для неинвазивной искусственной вентиляции легких.
[0037] Несмотря на то, что способы и системы, описанные ниже, применимы к неинвазивной искусственной вентиляции легких, эти способы и системы могут быть подобным образом использованы для любой системы управления потоком с использованием пропорциональных клапанов управления потоком, в частности там, где скорость дросселирования клапана значительно выше, чем требуемая пропускная способность замкнутого контура устройств для управления потоком.
[0038] На Фиг. 1 представлен один вариант реализации системы 100 для неинвазивной искусственной вентиляции легких. В данном варианте реализации пропорциональный клапан вводит газ на стороне высокого давления или выпускного отверстия нагнетателя воздуха, таким образом, что нагнетатель воздуха и пропорциональный клапан создают давление. Кроме того, в соответствии с одним из вариантов реализации, система представляет собой одноконтурное устройство для искусственной вентиляции легких, в котором имеет место значительная утечка в области соединения с пациентом и в котором выдыхаемый пациентом газ стремится к перемещению в обратном направлении через нагнетатель воздуха во время выдоха.
[0039] Система 100 содержит источник 220 газа (см. фиг. 2), в котором может использоваться любой газ, пригодный для дыхания, в том числе, но без ограничения, атмосферный воздух и кислород, помимо прочего. Газ из источника газа подают из устройства для искусственной вентиляции легких под заранее заданным давлением. Кроме того, система содержит контроллер 120, который представляет собой универсальный микропроцессор, интегральную схему специального назначения (ASIC), систему-на-кристалле (SOC) и/или программируемые пользователем вентильные матрицы (ППВМ) помимо других типов контроллеров. Контроллер может быть реализован с использованием или без использования процессора, а также может быть реализован в виде комбинации аппаратного обеспечения специального назначения для выполнения некоторых функций и процессора (например, одного или нескольких запрограммированных микропроцессоров и связанных схем) для выполнения других функций.
[0040] Контроллер 120 может быть соединен или может находиться в сообщении иным образом с любой необходимой памятью, источником питания, устройствами ввода/вывода, схемой управления и/или другими устройствами, необходимыми для работы системы в соответствии с описанными или иным образом представленными в настоящем документе вариантами реализации. Например, в различных вариантах реализации процессор или контроллер могут быть соединены с одним или несколькими носителями данных. В некоторых вариантах реализации на носителе данных может быть закодирована одна или несколько программ, которые, при выполнении одним или несколькими процессорами и/или контроллерами, выполняют по меньшей мере некоторые из функций, описанных в настоящем документе. Различные носители данных могут неподвижно находиться внутри процессора или контроллера, или же могут быть переносными, так что одна или несколько программ, хранящихся на нем, могут быть загружены в процессор или контроллер для реализации различных аспектов настоящего изобретения, описанных в настоящем документе. Термины «программа» или «компьютерная программа» используют здесь в обобщенном смысле для обозначения любого типа компьютерного кода (например, программного обеспечения или микрокода), который может быть использован для программирования одного или нескольких процессоров или контроллеров.
[0041] В соответствии с вариантом реализации, система содержит трубку или трубчатую конструкцию 130, по которой газ доставляют из удаленного компонента 140 устройства для искусственной вентиляции легких к маске 150 пользователя. Маска 150 пользователя может представлять собой, например, лицевую маску, которая охватывает полностью или частично рот и/или нос пользователя. Маски могут быть разных размеров для адаптации к различным размерам пациентов или индивидуумов, и/или маска может быть настраиваемой. В качестве другой альтернативы, маска 150 пользователя может быть вставлена в трахеотомическую трубку или установлена на ней, или может взаимодействовать с ней иным образом. Следовательно, маска 150 пользователя может иметь различные размеры для приспособления к трахеотомиям различных форм и размеров. Маска пользователя выполнена с возможностью по меньшей мере частичной вставки в дыхательные пути пациента.
[0042] Кроме того, система 100 содержит нагнетатель 160 воздуха с двигателем, который вместе с системой 200 пропорционального клапана (показана на фиг. 2) генерирует поток и давление для системы. Управление двигателем нагнетателя воздуха осуществляет контроллер 162 двигателя нагнетателя воздуха, который выполнен с возможностью управления, например, скоростью двигателя. В соответствии с вариантом реализации, двигатель нагнетателя воздуха является компонентом нагнетателя воздуха, который может содержать лопасти, корпус и двигатель. Поток и давление в системе частично определяются скоростью двигателя нагнетателя воздуха, управление которой, в свою очередь, осуществляет контроллер 162. Контроллер 162 двигателя нагнетателя воздуха может представлять собой такой же контроллер, что и контроллер 120, или может представлять собой отдельный контроллер, который, предпочтительно связан с контроллером 120. Контроллер может представлять собой любой процессор и может быть соединен тем или иным образом с любой необходимой памятью, источником питания, устройствами ввода/вывода, схемой управления и/или другими устройствами, необходимыми для работы системы, в соответствии с вариантами реализации, описанными или иным образом предусмотренными в настоящем документе.
[0043] В соответствии с вариантом реализации, в системе 100 используют как воздух окружающей среды, так и кислород под высоким давлением. Воздух окружающей среды поступает через впускной фильтр, а кислород поступает через впускное отверстие высокого давления, управление которым осуществляет система 200 пропорционального клапана. Следовательно, с целью управления потоком и давлением газа в устройстве для искусственной вентиляции легких, система 100 должна точно управлять как скоростью двигателя нагнетателя воздуха, так и работой системы пропорционального клапана. Ссылаясь на фиг. 2, в одном варианте реализации система представляет собой систему 200 пропорционального клапана. Система пропорционального клапана содержит пропорциональный клапан 210, который может представлять собой любой пропорциональный клапан, известный из уровня техники. Существует много различных типов пропорциональных клапанов, в том числе винтовые пропорциональные клапаны, электромагнитные пропорциональные клапаны и многие другие типы пропорциональных клапанов. Любой из этих клапанов может быть использован в системе 200. Кроме того, система пропорционального клапана содержит источник 220 газа высокого давления. Источник газа может представлять собой любой источник газа, который может быть использован, такой как воздух окружающей среды, резервуар с кислородом, резервуар с азотом, их комбинации, а также очень широкий спектр других источников газа. Нет необходимости в том, чтобы газ был пригоден для вдыхания человеком, и, следовательно, газ в источнике газа может быть токсичным или представлять собой другой газ. Газ из источника 220 газа выходит из него через 230 и выходит через выпускное отверстие 240, если пропорциональный клапан 210 по меньшей мере частично открыт. Пропорциональный клапан 210 управляет количеством газа, выходящего из источника газа, а также скоростью, при которой из источника газа выходит указанное количество газа.
[0044] Система пропорционального клапана содержит контроллер 250, который может представлять собой такой же контроллер, что и контроллер 120, или может представлять собой отдельный контроллер, который предпочтительно связан с контроллером 120. Контроллер может представлять собой любой процессор и может быть соединен тем или иным образом с любой необходимой памятью, источником питания, устройствами ввода/вывода, схемой управления и/или другими устройствами, необходимыми для работы системы, в соответствии с описанными или иным образом представленными в настоящем документе вариантами реализации. Несмотря на то, что на фиг. 2 контроллер 250 показан отдельно от пропорционального клапана 210, в соответствии с другими вариантами реализации, контроллер может быть прикреплен к внешней стороне клапана, может быть неотъемлемой частью клапана, полностью удален от клапана или находиться в некоторой другой физической взаимосвязи с клапаном. В случае, когда контроллер удален от клапана, связь между контроллером и клапаном может быть осуществлена беспроводным образом.
[0045] Контроллер 250 управляет пропорциональным клапаном 210 и, таким образом, управляет количеством газа, выходящего из источника газа, а также скоростью, с которой указанное количество газа выходит из источника газа. Управление контроллером может осуществляться извне, например, пользователем, и/или оно может быть осуществлено посредством программирования. Например, пользователь может нажать кнопку или выдать другой входной сигнал, указывающий на необходимость увеличения потока, а контроллер принимает этот сигнал и выдает сигнал на пропорциональный клапан для увеличения потока. В качестве альтернативы, контроллер или связанный с ним процессор запрограммированы или выполнены с возможностью уменьшения или увеличения потока в соответствии с конкретным временем, откликом или другим входящим сигналом. Кроме того, система 200 содержит датчик 260 потока. Датчик потока обнаруживает поток газа после его выхода из пропорционального клапана 210. В соответствии с вариантом реализации, система 200 пропорционального клапана является компонентом устройства 100 для искусственной вентиляции легких, как показано на фиг. 2. Следовательно, выход 240 может представлять собой трубчатую конструкцию 130, ведущую к пациенту, или может быть соединен с ней.
[0046] Ссылаясь на фиг. 3, в одном варианте реализации она представляет собой вид примера системы 100 для неинвазивной искусственной вентиляции легких с нагнетателем 160 воздуха и системой 200 пропорционального клапана, которая содержит пропорциональный клапан, управляемый для установки и регулировки подачи потока газа высокого давления в систему. В данном варианте реализации пропорциональный клапан вводит в систему газ высокого давления, такой как кислород. Благодаря действию нагнетателя 160 воздуха, воздух окружающей среды втягивается в систему, где он сжимается в нагнетателе воздуха, смешивается с кислородом из системы пропорционального клапана, а затем доставляется пациенту. Кроме того, система для искусственной вентиляции легких может содержать датчик 270 потока газа, предназначенный для обнаружения потока газа высокого давления. Информация от датчика 270 потока газа может быть использована, например, для анализа и/или регулировки пропорционального клапана 210 с целью доставки правильного потока газа. Кроме того, система 100 для искусственной вентиляции легких может содержать, например, датчик 190 потока воздуха, который обнаруживает поток воздуха окружающей среды, проходящий в нагнетатель воздуха 160. Информация от датчика 190 потока воздуха может быть использована для анализа и/или регулировки нагнетателя 160 воздуха для обеспечения доставки правильного потока воздуха. В качестве альтернативы, любой из датчика 270 потока газа и датчика 190 потока воздуха может быть использован для обнаружения сбоя при подаче газа или воздуха, соответственно. Воздух окружающей среды и газ высокого давления поступают в коллектор, где происходит смешивание этих двух газов. Затем смешанный газ поступает к пациенту. Смешанный газ сжимается как нагнетателем 160 воздуха, так и пропорциональным клапаном 210, перед доставкой пациенту 100. Несмотря на то, что на фиг. 3 изображена система определенной конфигурации, возможны многие вариации данной конфигурации.
[0047] Ссылаясь на фиг. 4, в одном варианте реализации представлена блок-схема последовательности операций способа 400 управления давлением и газовой смесью в системе для неинвазивной искусственной вентиляции легких. На этапе 410 обеспечивают систему 100 для неинвазивной искусственной вентиляции легких. Система представляет собой любую из систем для неинвазивной искусственной вентиляции легких, описанных или иным образом представленных в настоящем документе, и может содержать, например, помимо прочих компонентов, контроллер 120, нагнетатель 160 воздуха, контроллер 162 двигателя нагнетателя воздуха, пропорциональный клапан 210, контроллер 250 пропорционального клапана, источник 220 газа и датчик 260 потока. Также возможны и другие варианты реализации.
[0048] На этапе 420 способа активируют систему 100 для искусственной вентиляции легких, а контроллер 120 управляет контроллером 162 двигателя нагнетателя воздуха, который может представлять собой такой же контроллер, для активации двигателя нагнетателя воздуха для подачи воздуха окружающей среды в систему. Кроме того, контроллер 120 управляет контроллером 250 пропорционального клапана, который может представлять собой такой же контроллер, для открытия пропорционального клапана 210, чтобы обеспечить возможность попадания газа высокого давления в систему. Активированный нагнетатель 160 воздуха и открытый пропорциональный клапан 210 совместно создают поток и давление, и за счет их соотношения потока, конкретную газовую смесь в системе.
[0049] На этапе 430 способа контроллер 162 двигателя нагнетателя воздуха управляет и регулирует скорость двигателя нагнетателя воздуха с использованием многоуровневого механизма 500 обратной связи. Ссылаясь на фиг. 5, в одном варианте реализации она представляет собой схематический вид многоуровневого механизма обратной связи. В соответствии с вариантом реализации, система 100 должна охватывать широкий диапазон скоростей и динамику нагрузки для точного отслеживания и поддержания давления. Кроме того, системе может быть необходима устойчивость к возмущениям потока, в процессе регулирования траектории давления, помимо других требований управления. Для того обеспечения данных требований, в системе 100 используется каскадная архитектура управления с четырьмя встроенными контурами управления обратной связью: (1) контур обратной связи электрического тока; (2) контур обратной связи скорости нагнетателя воздуха; (3) контур обратной связи потока; и (4) контур обратной связи давления. Данная архитектура максимизирует жесткость внутреннего контура и управляет подавлением возмущений на каждом подуровне, так что устройство для управления давлением на самом верхнем уровне способны достичь высокой производительности. В соответствии с вариантом реализации, контур обратной связи электрического тока минимизирует воздействие со стороны противоэлектродвижущей силы («противоЭДС») и преодолевает свойственную электрическую постоянную времени двигателя. Контур обратной связи скорости нагнетателя воздуха может линеаризовать устройства для управления скоростью, подавлять возмущения нагрузки двигателя и обеспечивать жесткое ограничение до максимальной скорости с высокой степенью точности. Контур обратной связи потока помогает подавлять факторы воздействия на давление, обусловленные потребностью пациента в потоке, кашлем и частичными помехами в схеме. При этом на верхнем уровне контур обратной связи давления точно отслеживает траектории приложенного давления. Кроме того, система может содержать псевдодифференциальный компенсатор («ПДК»), предназначенный для управления давлением, который устраняет перегрузку, обусловленную нулевыми значениями ПИД, но сохраняет характерные особенности устойчивости ПИД. Компенсатор контура потока также представляет собой ПДК, а контур скорости представляет собой ПИД.
[0050] В соответствии с вариантом реализации, для контроллера 162 двигателя нагнетателя воздуха предусмотрен дополнительный фильтр, используемый для обратной связи. Фильтр объединяет сигналы машинного и проксимального давления в единый сигнал для обратной связи. В соответствии с вариантом реализации, объединение осуществляют по дополнительным полосам частот: проксимального датчика на низкой частоте и машинного датчика на более высоких частотах. Машинный сигнал с меньшей задержкой обеспечивает устойчивый, но ускоренный отклик нагнетателя воздуха, а проксимальный сигнал (который представляет собой измеренное значение давления в проксимальном соединении с пациентом) - точное проксимальное давление в состоянии покоя.
[0051] На этапе 440 способа контроллер 170 смеси осуществляет мониторинг объема и направления потоков через схему и нагнетатель воздуха, а также регулирует поток кислорода, проходящий через пропорциональный клапан, для обеспечения управления смесью. В соответствии с вариантом реализации, контроллер смеси отдельно определяет траекторию потока для сервосигнала пропорционального клапана потока кислорода, обеспечивая быстрое и точное управление смесью. Например, контроллер смеси может выполнить коррекцию смеси, если им была обнаружена ошибка в текущей смеси. В соответствии с вариантом реализации, коррекция смеси состоит из контроллера с обратной связью с пропорционально-интегральным (ПИ) компенсатором, который функционирует вместе с частью прямой обратной связи контроллера. В соответствии с вариантом реализации, контроллер смеси также восполняет проблему повторного вдоха, тщательно отслеживая объем и направление источников потока воздуха посредством внутренних коллекторов. Он определяет то, насколько сильно обогащен газ в подводящем пути нагнетателя воздуха при повторном вдохе, а контроллер смеси уменьшает поток кислорода с целью восполнения. Канал положительной обратной связи используют для быстрого реагирования на заданную смесь, а более медленная обратная связь - для получения высокой точности в установившемся режиме.
[0052] В соответствии с вариантом реализации, контроллер смеси использует устройство для оценки смеси, обеспечивающее оценку обратной связи для коррекции количества O2 контроллером смеси, который, в свою очередь, выполняет тщательный мониторинг объема и направления потоков воздуха посредством схемы и нагнетателя воздуха. Ссылаясь на фиг. 10, в одном варианте реализации она представляет собой схематический вид устройства 1000 для оценки смеси.
[0053] На этапе 450 контроллер скорости выполняет мониторинг скорости и дополняет показания скорости с тахометра при низкой скорости, обеспечивая возможность управления скоростью нагнетателя воздуха при очень низких скоростях. В соответствии с вариантом реализации, контроллер скорости соединяет контроллеры потока и электрического тока, и блокирует возмущения, вызванные вязкостью трения и вращением. Контроллер скорости зависит от основанного на модели устройства для наблюдения за скоростью двигателя с целью дополнения показаний скорости с тахометра при низкой скорости. Это может значительно улучшить возможность управления быстрыми изменениями давления, возникающими при выдохе, с помощью нагнетателя воздуха.
[0054] На этапе 460 происходит изменение давления и/или потока, и система приспосабливается, например, путем повышения или понижения смеси, повышения или понижения давления посредством системы пропорционального клапана, и/или путем повышения или понижения скорости двигателя нагнетателя воздуха. Изменение давления и/или потока может быть запросом на изменение, например, изменение в настройках устройства для искусственной вентиляции легких. Данное изменение может быть результатом утечки в системе или изменением состояния, положения пользователя устройства для искусственной вентиляции легких, или других изменениями. Система 100 обнаруживает изменение и определяет их с использованием контроллера или контроллеров, а также способов, описанных в настоящем документе, для регулировки системы и возврата надлежащих настроек давления и/или потока.
[0055] Управление давлением при неинвазивной искусственной вентиляции легких
[0056] Ссылаясь на фиг. 5, в одном варианте реализации она представляет собой схематическое представление каскадного контроллера 500 давления с контуром скорости, контуром потока и контуром давления. Устройства для управления давлением при неинвазивной искусственной вентиляции легких используют источники газа от нагнетателя воздуха и кислородного клапана, обеспечивающие поддержание газовой смеси для пациента через одну одноконтурную систему с ожидаемыми утечками. С целью преодоления ограничивающих динамических различий в системе используют альтернативный подход к смешиванию, называемый «координированием». При координировании сервоконтур потока кислорода выполнен так, чтобы следовать траектории потока, определяемой фракцией измеренного общего потока. Подробная информация об алгоритме координирования приведена ниже, однако в первую очередь важно также рассмотреть проблему, которая влияет на смесь при управлении давлением при неинвазивной искусственной вентиляции легких, а именно повторный вдох пациентом выдыхаемого газа в подводящем пути нагнетателя воздуха. В системе с одноконтурной схемой при определенных настройках и нагрузке пациента, газ во время выдоха может изменить направление, через подводящий путь нагнетателя воздуха, обогащая этот подводящий путь кислородом для последующего вдоха. Важно, что устройства для управления принимают во внимание повторный вдох для соответствия точности смеси.
[0057] В соответствии с вариантом реализации, система также должна охватывать широкий диапазон динамики нагрузки для точного отслеживания давления. Кроме того, система может быть должна подавлять возмущения в потоке при регулировании траектории давления. Для удовлетворения таких возможностей и обеспечения возможности строгого ограничения скорости может быть использована архитектура каскадного управления. В соответствии с вариантом реализации, каскадная архитектура содержит три встроенных контура управления обратной связью: (i) контур скорости; (ii) контур потока и (iii) контур давления.
[0058] В соответствии с вариантом реализации, наиболее внутренний контур на выходе выдает текущую команду нагнетателя воздуха, а на входе принимает траекторию скорости от контура потока на следующем верхнем уровне, а также скорость нагнетателя воздуха, измерения электрического тока и напряжения для оценки скорости нагнетателя воздуха для обратной связи. Контур скорости поддерживает внутреннее управление с «антивиндапом» (от англ. – «anti-windup»), а также обеспечивает выходной сигнал, который выдают обратно на контроллер давления для постепенного замедления интегратора контроллера давления в случае, если контур скорости достигнет пределов насыщения. Контур потока на входе принимает траекторию потока от контура давления, наиболее внешний контур в каскаде и измеренное значение потока нагнетателя воздуха в качестве обратной связи. Контур давления принимает в качестве своих входных сигналов траекторию давления из любого конкретного режима искусственной вентиляции легких (ИВЛРД, ИВЛПД и т.д.), измеренные значения проксимального и машинного давления, объединенные посредством дополнительного фильтра для обратной связи, а также насыщенный скоростью сигнал, от контура скорости. Каскадный подход к управлению может быть выгодным образом применен в случае, если процесс способен обеспечить более одного релевантного измеренного значения для достижения цели первичного контроля. Рассматривая сигналы промежуточной обратной связи, процесс может быть спроектирован для улучшения отслеживания и блокировки помех. Для устройств управления давлением учитывают измеренные значения давления, потока и скорости с целью каскадного управления.
[0059] В соответствии с вариантом реализации, внутренний контур скорости содержит элемент для выполнения «антивиндапа», который находится в локальном и отдаленном сообщении с контуром внешнего давления, обеспечивая немедленное восстановление от насыщения при максимальной или минимальной скорости. Данное нелинейное управление обеспечит возможность ускорения нагнетателя воздуха настолько быстро, насколько позволят текущие ограничения без перегрузки или потери управления. В соответствии с вариантом реализации, сигнал обратной связи контура скорости может быть выдан посредством комбинированного сигнала тахометра X6 на эффекте Холла для высокой скорости и устройства для оценки, основанного на модели, при низкой скорости и вплоть до нулевого значения с частотой дискретизации 1 кГц, без неравномерного колебания фазы. Контроллер обратной связи потока промежуточного контура помогает устранить помехи потока в контуре управления давлением и помогает обеспечить дополнительное демпфирующее действие для контура управления давлением.
[0060] В соответствии с вариантом реализации, динамика управления давлением и координированного управления смесью тесно связаны в части нагрузки, которой они управляют, и должны быть функционально рассмотрены вместе в достижении требуемой стабильности и производительности, однако эти два контроллера отделены друг от друга с точки зрения топологии и, следовательно, могут быть описаны отдельно. Следует отметить, что на фиг. 5 и 6 изображена общая структура компонентов контроллера и соединения между ними. Однако каждый компонент каскадного управления, компенсаторов давления, потока и скорости описан более подробно ниже.
[0061] Компенсатор давления при неинвазивной искусственной вентиляции легких
[0062] На фиг. 6 представлен схематический вид компенсатора 600 контура управления давлением в нагнетателе воздуха согласно одному варианту реализации. Хотя машинное давление обеспечивает наилучшее измерение давления относительно стабильности управления, предполагаемая система координат для управления является более удаленным проксимальным соединением с пациентом. Однако большее различие в расстоянии между воздействием потока и измерением давления на проксимальном соединении с пациентом («проксимальное» или «Pprox») обуславливает значительное передаточное запаздывание в контуре обратной связи. Как правило, это запаздывание требует более низкого коэффициента усиления контура для достижения стабильной работы и, следовательно, снижения производительности (времени нарастания, перегрузки и т.д.). Необходимым условием может быть функционирование в системе координат проксимального давления и, поэтому, для восстановления как стабильности, так и производительности, может быть использован дополнительный фильтр, объединяющий два показателя давления вместе в единый показатель измеренного значения давления. Погрешность в отслеживании между траекторией давления и проксимальным давлением является наиболее важной в установившемся режиме (и до некоторой степени более низких частотах), а частоты перехода к запасам устойчивости, как правило, имеют место в более высоком диапазоне частот. Таким образом, каждый из показателей проксимального и машинного давления может быть обработан фильтрами, которые разделяют информацию по отдельным диапазонам частот, однако при этом объединен для обеспечения полного диапазона, который является более эффективным для управления с обратной связью, чем если бы они были взяты независимо друг от друга.
[0063] В соответствии с вариантом реализации, дополнительный фильтр реализован с использованием конструкции обобщенного фильтра для того, чтобы служить в роли фильтра нижних частот для Pprox компонента давления обратной связи, Pfdbk, и полосового фильтра для компонента Pmach. Описание дополнительного фильтра требует определения промежуточной частоты, ωx, в которой пересекаются амплитудные частотные характеристики фильтра нижних частот и полосового фильтра:
 (Ур. 1)
(Ур. 1)
[0064] Отсоединение или закупорка проксимальной линии может быть определена алгоритмом определения отсоединения и закупорки (который не описан в настоящем описании). Для FLP(n) может быть использован обобщенный фильтр со следующими настройками: a = 0; b = ωx = 6,28 рад/с (1 Гц); c = 1; d = ωx; ΔT = 0,001 с; входное значение обобщенного фильтра при x(n) = Pprox(n); и выходное значение обобщенного фильтра при y(n) = FLP(n). Для FBP(n) может быть использован полосовой фильтр со следующими настройками: ωнизкое = ωx; ωвысокое = 2513,3 рад/с (400 Гц); ΔT = 0,001 с; и установленное входное значение полосового фильтра, u(n) = Pmach(n); и установленное выходное значение полосового фильтра, v(n) = FBP(n). В соответствии с вариантом реализации, погрешность сервосигнала контроллера давления εp(n) представляет собой разницу между траекторией показателей давления Ptraj(n) и измеренным (исходным) давлением Pfdbk(n):
 (Ур. 2)
(Ур. 2)
[0065] ПДК-компенсатор контура давления
[0066] В соответствии с вариантом реализации, в базовой структуре компенсатора контура давления используется структура псевдодифференцирующей обратной связи. Данная структура выполняет такую же динамику замкнутого контура, как и при использовании ПИД-компенсатора, однако структура ПДК исключает нулевые значения, вводимые в ПИД, и, следовательно, любую перегрузку, вызываемую самим контроллером. На фиг. 6 изображено, что входной сигнал интегратора, Qi_in(n), вычисляют путем суммирования компонентов обратной связи «антивиндапа» от контроллера скорости и давления и произведения интегрального коэффициента усиления, KiP, а также погрешности сервосигнала давления 
 (Ур. 3)
(Ур. 3)
[0067] В соответствии с вариантом реализации, могут быть использованы следующие коэффициенты усиления: KiP = 300 л/мин/см H2O; KaP = 10 с-1; и KaPI = 10 с-1. Интеграция аппроксимируется в дискретном времени по правой разности. Выходное значение интегратора Qi_out (n) вычисляют как:
 (Ур. 4)
(Ур. 4)
при этом начальное условие  (0) = 0. Интегратор никогда не сбрасывается после начала работы.
(0) = 0. Интегратор никогда не сбрасывается после начала работы.
[0068] Компоненты обратной связи давления включают в себя масштабированные значения отфильтрованного машинного давления, Qр(n), и показатель времени изменения давления Qd(n), причем последний оценивают с помощью отфильтрованной производной машинного давления. В соответствии с вариантом реализации, способы, описанные в настоящем документе, могут быть использованы для вычисления этих компонентов путем замены следующих присвоенных переменных и параметров. Для производной давления обратной связи Pfdbk_f(n) используют следующую производную.
 (Ур. 5)
(Ур. 5)
[0069] Затем неотфильтрованную команду управления потоком, Qsum(n), вычисляют как сумму и разность выходных показателей интегратора и компонентов обратной связи:
 (Ур. 6)
(Ур. 6)
где KdP = 0,15 л/мин-сек/см H2O; и KpP = 12 л/мин-сек/см. Выходное значение компенсатора давления, траектория потока воздуха нагнетателя воздуха, Qb_traj(n) ограничены предельными значениями потока:
 (Ур. 7)
(Ур. 7)
где:  и
и  в заключение, разность насыщенности вычисляют для завершения цикла «антивиндапа» для давления ввиду предельных значений потока:
в заключение, разность насыщенности вычисляют для завершения цикла «антивиндапа» для давления ввиду предельных значений потока:
 (Ур. 8)
(Ур. 8)
[0070] Компенсатор потока нагнетателя воздуха при неинвазивной искусственной вентиляции легких
[0071] В соответствии с вариантом реализации, контроллер потока выполнен с возможностью сопряжения контуров управления скоростью и давлением нагнетателя воздуха и обеспечивает некоторую стабилизацию управления давлением в зависимости от того, каким образом реагирует поток. Данная стабилизация обеспечивает демпфирование устройств для управления давлением, а также обеспечивает большее отделение устройств для управления давлением от помех потока. Ссылаясь на фиг. 7, в одном варианте реализации она представляет собой схематический вид компенсатора 700 контура потока, основанного на конструкции ПДК.
[0072] Перед использованием обратной связи для вычисления погрешности сервосигнала потока, измеренное значение, Qb(n), исходного потока нагнетателя воздуха сперва может быть отфильтровано для снижения высокочастотного шума с использованием фильтра нижних частот второго порядка. Для получения отфильтрованного измеренного значения, Qbf(n), потока нагнетателя воздуха могут быть использованы следующие замены сигналов и настройки параметров: x(n) = Qb(n); y(n) = Qbf (n); ωo = 3000 рад/с; ζ = 0,707; и ΔT = 0,001 с. Как изображено на фиг. 7, погрешность сервосигнала контроллера потока,  может быть вычислена как разность между траекторией потока нагнетателя воздуха, Qb_traj(n), и масштабированным отфильтрованным измеренным значением, Qbf (n), потока нагнетателя воздуха:
может быть вычислена как разность между траекторией потока нагнетателя воздуха, Qb_traj(n), и масштабированным отфильтрованным измеренным значением, Qbf (n), потока нагнетателя воздуха:
 (Ур. 9)
(Ур. 9)
[0073] На фиг. 7 показано, что входное значение интегратора, ωi_in(n), вычисляют путем суммирования обратной связи «антивиндапа» и произведения интегрального коэффициента усиления, KiQ, и погрешности сервосигнала потока εQ(n):
 (Ур. 10)
(Ур. 10)
где используют следующие коэффициенты усиления: KaQ = 10 с-1; и KiQ = 2000 об/мин/л/мин-сек. Интеграцию аппроксимируют в дискретном времени по правой разнице. Выходное значение интегратора ωi_out(n) вычисляют как:
 (Ур. 11)
(Ур. 11)
при исходных условиях ωi_in(0) = 0 и ωi_out(0) = 2000. В соответствии с вариантом реализации, интегратор не сбрасывается после начала работы.
[0074] Компоненты обратной связи потока включают в себя масштабированные значения отфильтрованного потока нагнетателя воздуха Qb_f(n) и отфильтрованную производную потока  , как показано на фиг. 7. Могут быть использованы следующие присвоенные переменные и параметры. Для отфильтрованного потока нагнетателя воздуха,
, как показано на фиг. 7. Могут быть использованы следующие присвоенные переменные и параметры. Для отфильтрованного потока нагнетателя воздуха,  , x(n) = Qb(n); y(n) = Qb_f(n); ωo = 1500 рад/с; ζ = 0,707; ΔT = 0,001 с. Для отфильтрованной производной потока нагнетателя воздуха
, x(n) = Qb(n); y(n) = Qb_f(n); ωo = 1500 рад/с; ζ = 0,707; ΔT = 0,001 с. Для отфильтрованной производной потока нагнетателя воздуха  ; x(n) = Qb(n); y(n) =
; x(n) = Qb(n); y(n) =  ; ωo = 1500 рад/с; ζ = 0,707; ΔT = 0,001 с. Затем команда управления исходной скоростью, ωsum(n), может быть вычислена как сумма и разность компонентов выходного значения интегратора и обратной связи, и суммы погрешности давления прямой обратной связи:
; ωo = 1500 рад/с; ζ = 0,707; ΔT = 0,001 с. Затем команда управления исходной скоростью, ωsum(n), может быть вычислена как сумма и разность компонентов выходного значения интегратора и обратной связи, и суммы погрешности давления прямой обратной связи:
 (Ур. 12)
(Ур. 12)
где KdQ = 0,15 об/мин-сек/л/мин; и KpQ = 0,0 об/мин/л/мин. Выходное значение компенсатора потока нагнетателя воздуха, траектория скорости нагнетателя воздуха, ωtraj(n), ограничены предельными значениями скорости:
 (Ур. 13)
(Ур. 13)
где  =50 000 об/мин; и
=50 000 об/мин; и  = 2000 об/мин. Следует отметить, что контроллер скорости выполнен с возможностью управления при скорости ниже 2000 об/мин, однако в соответствии с вариантом реализации, данное нижнее предельное значение было выбран для обеспечения наилучшего ответа на восстановление после насыщения. Наконец, разность насыщенности вычисляют для завершения цикла «антивиндапа» для потока ввиду предельных значений скорости:
= 2000 об/мин. Следует отметить, что контроллер скорости выполнен с возможностью управления при скорости ниже 2000 об/мин, однако в соответствии с вариантом реализации, данное нижнее предельное значение было выбран для обеспечения наилучшего ответа на восстановление после насыщения. Наконец, разность насыщенности вычисляют для завершения цикла «антивиндапа» для потока ввиду предельных значений скорости:
 (Ур. 14)
(Ур. 14)
[0075] Контроллер скорости нагнетателя воздуха
[0076] В соответствии с вариантом реализации, управление скоростью нагнетателя воздуха обеспечивает управление скоростью нагнетателя воздуха для жесткого регулирования потока, а также помогает уменьшить вероятность выключения усилителя электрического тока двигателя при условиях превышения скорости. Это может быть достигнуто, например, при четком следовании траектории скорости, обеспечивая нулевую перегрузку и быстрое восстановление насыщения. Контроллер скорости может использовать, например, гибридный способ измерения скорости нагнетателя воздуха, в котором используют улучшенное показание тахометра X6 при высокой скорости и устройство для оценки, основанное на модели, при более низкой скорости. Гибридный подход обеспечивает сигнал скорости с низким уровнем шума, который реагирует во всем диапазоне с обновлением 1 кГц, включая точную оценку скорости, которая функционирует почти до нулевого значения скорости. В случае если бы тахометр использовался сам по себе, частота дискретизации на 6 переходах на эффекте Холла составляла бы всего около 200 Гц. За счет использования скорости, оцененной по электрическому току и напряжению, частота дискретизации 1 кГц скорости двигателя поддерживается постоянно вплоть до нулевого значения скорости. Не используя скорость, оцененную по электрическому току и напряжению выше 10000 об/мин, а вместо нее только сигнал тахометра, сигнал обратной связи заблокирован от распознавания низкочастотных гармонических колебаний двигателя – в частности, пульсации вращательного момента двигателя, известных также как пульсации крутящего момента. Более низкий диапазон управления скоростью обеспечивает улучшенное управление переходом давления в положительное давление в дыхательных путях при выдохе («ПДДПВ»).
[0077] В соответствии с вариантом реализации, контроллер может содержать интегратор как часть компенсатора для точности отслеживания траектории скорости, а также устройство для динамичного управления с «антивиндапом», которое находится в сообщении как с локальным интегратором в контроллере скорости, так и с интегратором в контроллере давления. Конструкция устройства для «антивиндапа» обеспечивает возможность работы контроллера при насыщении во время ускорения нагнетателя воздуха с целью минимизации времени нарастания и обеспечения немедленного восстановления при линейном управлении для точного отслеживания траектории скорости. В соответствии с вариантом реализации, единственный случай, когда контроллер не может отслеживать траекторию, имеет место во время быстрого замедления. Для быстрого замедления двигатель двухквадрантного контроллера электрического тока тормозит или иным образом уменьшает скорость двигателя, используя ограниченный источник электроэнергии, хранящийся в конденсаторах. Однако после восстановления контроллера электрического тока после торможения, контроллер скорости и его механизм для жесткого «антивиндапа» обеспечивают наивысшую вероятность блокировки на траектории скорости.
[0078] Компенсатор скорости нагнетателя воздуха
[0079] На фиг. 8 показана блок-схема компенсатора 800 скорости нагнетателя воздуха в одном варианте реализации. В соответствии с вариантом реализации, погрешность скорости εω(n) вычисляют как разность между траекторией скорости, ωtraj(n), и отфильтрованной оценкой скорости, 
 (Ур. 15)
(Ур. 15)
Отфильтрованная оценка скорости может быть получена путем фильтрации оценки исходной скорости  с помощью вычисления фильтром нижних частот второго порядка и с использованием следующих замен сигналов и значений параметров: x(n) = ; y(n) =
с помощью вычисления фильтром нижних частот второго порядка и с использованием следующих замен сигналов и значений параметров: x(n) = ; y(n) = ; ωо= 1800 рад/с; ζ = 0,707; и ΔT = 0,001. Перед описанием способа определения оценки исходной скорости, сперва будут описаны вычисления компенсатора скорости нагнетателя воздуха.
; ωо= 1800 рад/с; ζ = 0,707; и ΔT = 0,001. Перед описанием способа определения оценки исходной скорости, сперва будут описаны вычисления компенсатора скорости нагнетателя воздуха.
[0080] В соответствии с вариантом реализации, компенсатор 800 скорости нагнетателя воздуха в целом представляет собой устройство для пропорционального интегрального управления с фиксированными коэффициентами усиления и компенсацией «антивиндапом», но также возможно использование других механизмов. Как правило, интегральный коэффициент усиления определяет скорость (иначе говоря, электрическую жёсткость) в управлении, а пропорциональный коэффициент усиления добавляет демпфирование и помогает снизить перегрузку. Пропускная способность линейного частотного отклика (разомкнутого контура) нагнетателя воздуха относительно медленная, поэтому, для достижения соотношения траекторий потока/давления при высоких значениях давления в доли секунды в значительной степени зависит от возможности насыщения скорости нагнетателя воздуха. Кроме того, может быть важно, чтобы контроллер скорости обеспечивал возможность насыщения нагнетателя воздуха с максимальной скоростью, а также предусматривал быстрое восстановление после насыщения сразу же при изменении знака погрешности сервосигнала. Разность насыщения, обнаруженная в контроллере скорости, Ιb_sat(n), также может быть передана обратно в наружный контур давления в каскаде контроллера для того чтобы помочь интегратору контроллера давления в демпфировании погрешности во время насыщения нагнетателя воздуха.
[0081] Входное значение интегратора Ιi_in(n) вычисляют как сумму масштабированной погрешности скорости,  и масштабированной разности насыщения:
и масштабированной разности насыщения:
 (Ур. 16)
(Ур. 16)
 (Ур. 17)
(Ур. 17)
[0082] Пропорциональная составляющая управления электрическим  током может быть вычислена как произведение пропорционального коэффициента усиления компенсатора скорости,
током может быть вычислена как произведение пропорционального коэффициента усиления компенсатора скорости,  , и погрешности сервосигнала управления скоростью:
, и погрешности сервосигнала управления скоростью:
 (Ур. 18)
(Ур. 18)
[0083] Интеграцию аппроксимируют в дискретном времени по правой разности. Выходное значение интегратора, Ii_out(n), может быть рассчитано как:
 (Ур. 19)
(Ур. 19)
где начальные условия составляют  и
и  . Неограниченное управление, Ιsum(n), представляет собой лишь сумму интегральных и пропорциональных компонентов управления:
. Неограниченное управление, Ιsum(n), представляет собой лишь сумму интегральных и пропорциональных компонентов управления:
 (Ур. 20)
(Ур. 20)
[0084] Выходное значение управления скоростью, траектории электрического тока двигателя нагнетателя воздуха, Ib_tra(n), затем может быть вычислено как управление, ограниченное предельными значениями электрического тока:
 (Ур. 21)
(Ур. 21)
где  , и
, и

[0085] В соответствии с вариантом реализации, задается нулевое значение  , значение
, значение  фиксируется до 1 при фазе выдоха и ≤10000 об/мин, а значение сбрасывается до нулевого значения в начале вдоха. В соответствии с вариантом реализации,
фиксируется до 1 при фазе выдоха и ≤10000 об/мин, а значение сбрасывается до нулевого значения в начале вдоха. В соответствии с вариантом реализации,  вычисляют с использованием обобщенного фильтра, выполненного с возможностью линейного запаздывания, и с использованием следующих замен:
вычисляют с использованием обобщенного фильтра, выполненного с возможностью линейного запаздывания, и с использованием следующих замен:  ,
,  ,
,  ,
,  , и:
, и:  и
и  .
.
[0086] В соответствии с одним из вариантов реализации отфильтрованное переключение нижней границы электрического тока позволяет скорости приближаться к более низким значениям в течение первой части выдоха и, следовательно, к более низкому сопротивлению и работе дыхания.
[0087] Устройство для оценки скорости нагнетателя воздуха
[0088] С точки зрения моделирования, трехфазный бесщеточный двигатель может быть подобен двигателю постоянного тока с линейной зависимостью между электрическим током и крутящим моментом, а также напряжением и об/мин. Таким образом, модель двигателя постоянного тока может служить в роли устройства для точной оценки скорости. Следовательно, дискретное время устройства для оценивания, вычисляющего оценку скорости,  , может быть выведено в единицах об/мин путем включения коэффициента масштабирования 30/π:
, может быть выведено в единицах об/мин путем включения коэффициента масштабирования 30/π:

(Ур. 22)
где константы вычисления: R = 0,21 Ом; L = 0,000045 Генри; KT = 0,0065 Нм/А; а для  задано нулевое значение.
задано нулевое значение.
[0089] Контроллер смеси O2 при неинвазивной искусственной вентиляции легких
[0090] Для инвазивной искусственной вентиляции легких управление концентрацией доставляемого газообразного кислорода (смеси), как правило, осуществляют простым логометрическим разделением общей цели потока. Это применимо как к искусственной вентиляции легких с циклом объема, так и к искусственной вентиляции легких с циклом давления, а поскольку клапаны O2 и воздуха, как правило, совпадают или достаточно близки с точки зрения их статической чувствительности и динамического отклика, для соответствия конкретному коэффициенту соответствия в коррекции смеси, как правило, нет необходимости. Использование устройств для управления потоком с обратной связью для воздуха и O2, которое еще больше повышает точность устройств для управления потоком, усиливает данное предположение. Однако при некотором управлении смесью при неинвазивной искусственной вентиляции легких может иметь место динамическое несоответствие между откликом потока нагнетателя воздуха и клапана O2. Данное несоответствие, не говоря уже о выходной газовой смеси, возвращающейся в подводящий путь нагнетателя воздуха, делает реализацию логометрического подхода затруднительной, если не невозможной, вызывая неустойчивости управления давлением и большие погрешности смешивания. Для управления смесью может быть использован другой подход, в котором сервосигнал потока O2 следует за суммарным откликом потока. Как отмечено выше, такой подход называется «координированием» или «управлением с координированием». В данной архитектуре имеет место контур положительной обратной связи относительно измеренного значения потока O2. Стабильность возможна только в том случае, когда цепь обратной связи с отрицательным давлением остается доминирующей в общей системе управления давлением (содержащей элемент для управления смесью). Подход с координированием обеспечивает довольно постоянный отклик давления и подходящую точность смешивания во всем диапазоне настроек и ожидаемых нагрузок пациента. На фиг. 9 изображена общая структура компонентов контроллера 900 для этого подхода, а также соединения между ними. Более подробная информация о данном подходе приведена ниже.
[0091] Для управления смесью некоторые вычисления проходят через интервал ΔT регулярного управления, и эти вычисления индексированы переменной n = 1,2,3 ... Другие вычисления обновляют только один раз за цикл дыхания либо в начале вдоха, либо в начале выдоха. Эти вычисления имеют переменный временной интервал (в зависимости от заданной скорости дыхания или интервалов запуска) и индексированы переменной k = 1,2,3 ...
[0092] Управление смесью от вдоха до вдоха устанавливает неотъемлемую частоту дискретизации, фиксированную либо заданной частотой дыхания, либо, в случае вдохов, инициированных пациентом, измеренной частотой, которая варьируется в соответствии с интервалом последнего вдоха. Согласно теореме Шеннона о выборках, нельзя ожидать восстановления и использования информации, если выборка происходит медленнее, чем половина наивысшей частоты, которой собираются управлять. По мере изменения частоты дыхания конструкция контроллера должна поддерживать стабильное управление с замкнутым контуром с последовательным переходным откликом. Это создает проблему в то время, когда система может реагировать на изменение заданного значения только для обратной связи, и поэтому также необходим компонент непосредственной обратной связи с коэффициентом усиления <1,0 для того чтобы управление смесью проходило немедленно в правильном направлении. Затем следует более медленный ответ управления с замкнутым контуром.
[0093] В соответствии с вариантом реализации, управление смесью с замкнутым контуром получают способом размещения полюсов; способом прямого синтеза, в котором необходимую динамику системы с замкнутым контуром рассматривают как цель разработки – в части ее полюсов с замкнутым контуром. В данном подходе к разработке предполагается, что система непрерывного времени (смешивания) является ответом первого порядка с постоянной времени, составляющей 10 секунд. Предполагается удержание нулевого порядка, и комбинация этих двух элементов преобразуется в эквивалентную систему с дискретным временем. Затем для вычисления структуры и коэффициентов усиления контроллера используют установку с дискретным временем и требуемую систему с замкнутым контуром.
[0094] Коррекция смеси
[0095] Коррекция смеси может быть выполнена, например, с использованием элемента управления с обратной связью на основе устройства для оценки смеси вместо любых средств прямого измерения концентрации кислорода. В оценке используют измеренные значения нагнетателя воздуха и потока, а также предположения о пути потока. Коррекции обновляют от вдоха до вдоха и применяют в качестве коэффициента, уменьшающего составляющую кислорода в потоке. Коррекция смеси, в целом, необходима для решения проблемы повторного вдоха, но она также может откорректировать динамические отличия между доставкой газа нагнетателем воздуха и клапаном сжатого кислорода. Контроллер коррекции смеси вычисляет коэффициент коррекции смеси в начале каждого вдоха. Чем выше коэффициент воздействия кислорода при повторном вдохе, тем меньше будет коэффициент коррекции. Коэффициент коррекции, близкий к 1, указывает на небольшой или полностью отсутствующий повторный вдох.
[0096] Коррекция смеси может быть начата с вычисления погрешности смеси, εM(k), для каждого вдоха, определяемой разностью траектории смеси, Mtraj(k), и оцененным процентным содержанием в смеси,  :
:
 (Ур. 23)
(Ур. 23)
[0097] В соответствии с вариантом реализации, ПользовательскаяНастройкаСмеси(n) представляет собой значение настройки смеси, установленное пользователем, обновляемое при ΔT с:
 (Ур. 24)
(Ур. 24)

 (Ур. 25)
(Ур. 25)

[0098] В соответствии с вариантом реализации, фильтр может быть использован для создания плавной траектории для входа потока нагнетателя воздуха, следующего за фильтром.  можно вычислить, заменив следующее:
можно вычислить, заменив следующее:  ,
,  , ,
, ,  ,
,  ,
,  ,
,  , and
, and  .
.
[0099] Вход интегратора компенсатора смеси, Mi_in(k), вычисляют как:
 (Ур. 26)
(Ур. 26)
где  = 0,0. Для поддержания постоянного отклика на выборку, независимо от установленной частоты дыхания, α, β и коэффициенты усиления вычисляют от вдоха до вдоха непосредственно из обобщения, поскольку полюса и нули выражены в экспоненциальной форме:
= 0,0. Для поддержания постоянного отклика на выборку, независимо от установленной частоты дыхания, α, β и коэффициенты усиления вычисляют от вдоха до вдоха непосредственно из обобщения, поскольку полюса и нули выражены в экспоненциальной форме:
 (Ур. 27)
(Ур. 27)
 (Ур. 28)
(Ур. 28)
где  - интервал дыхания в секундах,
- интервал дыхания в секундах,  = 1,0 и
= 1,0 и  = 2 с.
= 2 с.
[00100] В соответствии с вариантом реализации, выходное значение интеграции вычисляют простой обратной разностью, однако при этом скрепленной минимальным и максимальным коэффициентами коррекции как
 (Ур. 29)
(Ур. 29)
где начальные условия представляют собой  .
.
[00101] Для «антивиндапа» потока нагнетателя воздуха, следующего за фильтром, разность смеси, Msat(n), вычисляют как:
 (Ур. 30)
(Ур. 30)
[00102] В соответствии с вариантом реализации, контроллер сбрасывается при двух условиях: (1) установленная смесь составляет 21% - (в данном случае контроллер удерживают в режиме сброса для всех вдохов пока установленная смесь составляет 21%) или (2) произошло изменение траектории смеси (и в данном случае контроллер сбрасывают до его значения сброса только для этого одного вдоха):
 (Ур. 31)
(Ур. 31)
где  .
.
[00103] Последовательная логическая схема, связанная с изменениями пользовательских настроек смеси, на которую они воздействуют мгновенно, и то, каким образом определенные изменения ограничены состояниями или событиями в процессе дыхания, правильно определена логическими положениями, приведенными в настоящем документе. Мгновенные изменения в смеси могут произойти только во время выдоха, и на них воздействуют компоненты фильтра BFF и CPC. Однако действия контроллера смеси с замкнутым контуром имеют большую задержку, инициирование которых происходит только в начале вдоха и дополнительно ограничены условиями сброса.
[00104] После вычисления показателя эталонного потока кислорода, может быть применен коэффициент скорректированной смеси для вычисления траектории сервосигнала потока кислорода из общей скорости отфильтрованного потока при стандартной скорости управления (каждую 1 мс):
 (Ур. 32)
(Ур. 32)
[00105]  состоит из двух компонентов: отфильтрованного потока нагнетателя воздуха, следующего за компонентом,
состоит из двух компонентов: отфильтрованного потока нагнетателя воздуха, следующего за компонентом,  , и компонента погрешности давления дополнительного фильтра,
, и компонента погрешности давления дополнительного фильтра,  :
:
 (Ур. 33)
(Ур. 33)
где 
[00106] Для каждого отфильтрованного компонента на каждом интервале времени вычисляют коэффициент масштабирования,  , и полюс фильтра
, и полюс фильтра  :
:
 (Ур. 34)
(Ур. 34)
 (Ур. 35)
(Ур. 35)
где  . В соответствии с вариантом реализации,
. В соответствии с вариантом реализации,  представляет собой коэффициент регулировки, который при высоких настройках смеси отменяет жесткость отслеживания и шумовую связь между потоком нагнетателя воздуха и потоком кислорода. Небольшое значение
представляет собой коэффициент регулировки, который при высоких настройках смеси отменяет жесткость отслеживания и шумовую связь между потоком нагнетателя воздуха и потоком кислорода. Небольшое значение  обеспечивает жесткость отслеживания, однако дает поток кислорода с усиленным шумом.
обеспечивает жесткость отслеживания, однако дает поток кислорода с усиленным шумом.
[00107] В соответствии с вариантом реализации, отфильтрованный компонент потока нагнетателя воздуха вычисляют с использованием фильтра нижних частот, влияя на измерение потока нагнетателя воздуха, откорректированное по смеси
 (Ур. 36)
(Ур. 36)
 (Ур. 37)
(Ур. 37)
где  ,
,  , и
, и  .
.
[00108] В соответствии с вариантом реализации, компонент погрешности давления дополнительного фильтра вычисляют как фильтр высоких частот последовательно с фильтром нижних частот (суммарный результат: полоса пропускания), влияя на погрешность давления:
 (Ур. 38)
(Ур. 38)
 (Ур. 39)
(Ур. 39)
 (Ур. 40)
(Ур. 40)
где  ,
,  , и
, и  .
.
[00109] Устройство для оценки смеси
[00110] В соответствии с вариантом реализации, устройство для оценки смеси может быть использовано для обеспечения оценки обратной связи для корректирующей части O2 контроллера смеси. Целями разработки устройства для оценки смеси являются, например: (1) обеспечение усредненной оценки доставленной смеси по множеству вдохов; (2) моделирование поведения обратного потока и коррекция оценки воздуха, обогащенного О2, в начале вдохов. Текущая концентрация кислорода (смеси) в простейшей форме (при условии отсутствия обратных продуктов обмена веществ или газовой смеси от предшествующих вдохов) может быть определена соотношением фракции кислорода в потоке и общего потока газа.
[00111] Ссылаясь на фиг. 10, в одном варианте реализации она представляет собой схематический вид устройства 1000 для оценки смеси в контроллере смеси. Коэффициент смешивания нагнетателя воздуха, Kb_O2(n), может быть выбран в соответствии с состоянием окна повторного вдоха WR (n):
 (Ур. 41)
(Ур. 41)
где  представляет собой текущую оцененную фракцию смеси из выборки (взятую при спадающем фронте e(n)). WR (n) представляет собой окно, которое при истинном значении указывает на обогащенный воздух, содержащийся в подводящем пути нагнетателя воздуха. WR (n) также называют «окном повторного вдоха», которое обновляют по циклу управления и определено далее графиками и диаграммами состояния. Когда WR (n) истинно, это указывает на то, что воздух, обогащенный O2, от предыдущего вдоха остается в подводящем пути нагнетателя воздуха, а также на то, что последняя текущая оцененная фракция смеси из выборки должна быть использована для определения фракции кислорода в газе, подаваемом нагнетателем воздуха. Когда WR(n) устанавливается в исходное положение, смесь, подаваемая нагнетателем воздуха, считают равной 21%.
представляет собой текущую оцененную фракцию смеси из выборки (взятую при спадающем фронте e(n)). WR (n) представляет собой окно, которое при истинном значении указывает на обогащенный воздух, содержащийся в подводящем пути нагнетателя воздуха. WR (n) также называют «окном повторного вдоха», которое обновляют по циклу управления и определено далее графиками и диаграммами состояния. Когда WR (n) истинно, это указывает на то, что воздух, обогащенный O2, от предыдущего вдоха остается в подводящем пути нагнетателя воздуха, а также на то, что последняя текущая оцененная фракция смеси из выборки должна быть использована для определения фракции кислорода в газе, подаваемом нагнетателем воздуха. Когда WR(n) устанавливается в исходное положение, смесь, подаваемая нагнетателем воздуха, считают равной 21%.
[00112] На фиг. 10 изображено, например, то, что существуют три отдельных усредненных значения, которые могут поддерживаться непрерывно: (i) усредненный общий поток нагнетателя воздуха  ; (ii) усредненный эффективный поток кислорода от клапана O2,
; (ii) усредненный эффективный поток кислорода от клапана O2,  ; и (iii) усредненная фракция потока нагнетателя воздуха, которая является чистым O2,
; и (iii) усредненная фракция потока нагнетателя воздуха, которая является чистым O2, 
[00113] В соответствии с вариантом реализации, поскольку датчик потока нагнетателя воздуха всегда настроен на измерение воздуха, Qb(n) корректируют до ожидаемого состава газа в соответствии с пользовательскими настройками смеси, Mset (n), поскольку QbO2corr(n) и QbO2corr(n) ограничены положительным потоком, поскольку положительный поток имеет отношение к устройству для оценки. Кроме того, следует отметить, что Kb_O2(n) фиксирован из оценки текущей смеси,  , и на спадающем фронте e(n). Эти конкретные сигналы и значение времени имеют решающее значение для обеспечения точной оценки смеси при высокой частоте дыхания, от умеренного до высокого объема, при условиях сильного смешивания, при котором эффекты повторного вдоха становятся значительными.
, и на спадающем фронте e(n). Эти конкретные сигналы и значение времени имеют решающее значение для обеспечения точной оценки смеси при высокой частоте дыхания, от умеренного до высокого объема, при условиях сильного смешивания, при котором эффекты повторного вдоха становятся значительными.
[00114] С целью оценки усредненных значений, устройство для оценки смеси может использовать специальные сдвиги фазы (фильтры) первого порядка, которые обеспечивают возможность фиксации в соответствии с состоянием нагнетателя воздуха. В соответствии с вариантом реализации, требуются три случая, при которых применяют следующую замену переменных и параметров, а логику включения для каждого из трех фильтров определяют направлением потока в коллекторе. Смесь оценивают только при потоке, который перемещается в направлении к пациенту. Отрицательный поток не допускается к фильтрам  .
.
[00115] Сперва корректируют потоки нагнетателя воздуха и кислорода. Поток нагнетателя воздуха корректируют для текущей смеси в датчике потока нагнетателя воздуха:
 (Ур. 42)
(Ур. 42)
[00116] И за потоком кислорода закрепляют нулевое значение:
 (Ур. 43)
(Ур. 43)
[00117] Чистый поток представляет собой сумму потока нагнетателя воздуха и потока кислорода. Физическая разница между потоком нагнетателя воздуха и потоком сжатого газа заключается в том, что нагнетатель воздуха может как уменьшать поток, так и получать его. Сжатый газообразный кислород может лишь получать поток. Во время доставки вдоха, на состав и объем потока газа, идущего к пациенту, Qnet, будет оказывать влияние направление потока нагнетателя воздуха, Qb, и объем потока относительно объема потока кислорода, QO2. Эти условия определяют отличительное состояние потока, которое может быть использовано в качестве основы для более точной оценки смеси. Например, первое и второе состояние потока могут определять чистый поток, идущий в направлении к пациенту. Третье состояние потока может определять выдох. В состоянии 1 потока как поток газа нагнетателя воздуха, так и поток газообразного кислорода направлены в сторону пациента. В состоянии 2 потока направление потока нагнетателя воздуха изменено на обратное, однако поскольку поток нагнетателя воздуха слабее, чем поток кислорода, чистый поток является их отличием и имеет в составе чистый кислород. В состоянии 4 потока учтен случай, в котором поток нагнетателя воздуха равен и противоположен потоку кислорода; весь газообразный кислород проходит из нагнетателя воздуха, а значение чистого потока к пациенту равно нулю. Массив взаимоисключающих состояний коллектора представлено следующим:



 (Ур. 44)
(Ур. 44)
[00118] В случае если это допустимо фильтром в устройстве для оценки, e(n) принимает вид:
 (Ур. 45)
(Ур. 45)
где следующие показатели определяют другие входные и выходные значения трех фильтров в устройстве для оценки смеси:  и
и  .
.
[00119] (1) При  составляющая кислорода в потоке нагнетателя воздуха:
составляющая кислорода в потоке нагнетателя воздуха:  ;
;  ;
;  ; ΔT = 0,001 секунды; и
; ΔT = 0,001 секунды; и  ,21 (предполагается, что воздух первоначально находится в цепи).
,21 (предполагается, что воздух первоначально находится в цепи).
[00120] (2) При  общий поток нагнетателя воздуха:
общий поток нагнетателя воздуха:  ;
;  ΔT = 0,001 секунды; и
ΔT = 0,001 секунды; и  (начальное условие для этого фильтра предотвращает деление на ноль при запуске).
(начальное условие для этого фильтра предотвращает деление на ноль при запуске).
[00121] (3) При  поток из газового клапана сжатого кислорода:
поток из газового клапана сжатого кислорода:
 (Ур. 46)
(Ур. 46)

где τ = τM; ΔT = 0,001 секунды; и yo = 0,0.
[00122] На каждом этапе n управления оценка текущей фракции в смеси, , может быть вычислена как:
 (Ур. 47)
(Ур. 47)
[00123] В начале каждого вдоха, усредненное значение фракции в смеси  , может быть отобрано, обеспечивая среднее значение
, может быть отобрано, обеспечивая среднее значение  за последний вдох:
за последний вдох:
 (Ур. 48)
(Ур. 48)
а оценку процента смеси,  , вычисляют для использования в контроллере смеси:
, вычисляют для использования в контроллере смеси:
 (Ур. 49)
(Ур. 49)
 (Ур. 50)
(Ур. 50)
[00124] С целью завершения описания устройства для оценки смеси, оцененная фракция смеси от предыдущего доставленного вдоха,  , может быть отобрана, когда чистый поток становится отрицательным:
, может быть отобрана, когда чистый поток становится отрицательным:
 (Ур. 51)
(Ур. 51)
[00125] Логическая схема состояния окна повторного вдоха
[00126] Ссылаясь на фиг. 11, в одном варианте реализации она представляет собой блок-схему, на которой изображена последовательная логическая схема 1100 повторного вдоха. Логическая схема повторного вдоха определяет состояние окна повторного вдоха WR(n), которое при ИСТИННОМ значении, указывает на то, что некоторая часть обогащенного кислородом газа от предыдущего вдоха поступила в контур коллектора нагнетателя воздуха при выдохе. Таким образом, это обеспечивает указательный сигнал для устройстве для оценки смеси для обогащения концентрации O2 во входном газе нагнетателя воздуха во время восстановления смещения потока при выдохе или в начале вдоха при последующем вдохе. Логическая схема обнаруживает и вычисляет объем этого обогащенного газа и применяет его (вплоть до предполагаемого ограничения нечувствительностью) для активации сигнала.
[00127] Следует отметить, что синхронизация окна повторного вдоха не зависит от сигнала выполнения команды (IE signal), а зависит только от нулевого перекрещивания потока нагнетателя воздуха. Это является важным конструктивным признаком, поскольку при высокой частоте дыхания происходит значительный сдвиг фазы между сигналами IE и Qb:
 (Ур. 52)
(Ур. 52)
 (Ур. 53)
(Ур. 53)
 (Ур. 54)
(Ур. 54)
 (Ур. 55)
(Ур. 55)
 (Ур. 56)
(Ур. 56)
 (Ур. 57)
(Ур. 57)
 (Ур. 58)
(Ур. 58)
[00128] Функция SR_FlipFlop функционирует таким же образом, что и цифровой триггер или фиксатор с раздельными входами.  (n) представляет собой «установленное» входное значение, а
(n) представляет собой «установленное» входное значение, а  (n) представляет собой входное значение сброса с C в таблице, представляющей (нарастающий) фронт импульса, который совпадает с приращением n. Входные значения триггера определяют следующим образом.
(n) представляет собой входное значение сброса с C в таблице, представляющей (нарастающий) фронт импульса, который совпадает с приращением n. Входные значения триггера определяют следующим образом.
 (Ур. 59)
(Ур. 59)
 (Ур. 60)
(Ур. 60)
 (Ур. 61)
(Ур. 61)
где  ,
,  :
:
 (Ур. 62)
(Ур. 62)
[00129] Для QbO2corr (n), как было определено выше, оно представляет собой откорректированный для смеси, измеренный датчиком нагнетателя воздуха поток в л/мин. Положительный поток перемещается от нагнетателя воздуха в направлении к предохранительному клапану и точке введения на теле пациента. VD представляет собой эффективный объем зоны нечувствительности.
[00130] Все определения, определенные и используемые в настоящем документе, следует понимать как обладающие преимуществом над определениями из словарей, определениями, содержащимися в документах, включенных посредством ссылки, и/или общепринятыми значениями определенных терминов.
[00131] Грамматические показатели единственного числа, используемые в настоящем документе в описании и в пунктах формулы изобретения, если явным образом не указано обратное, следует понимать как «по меньшей мере одно».
[00132] Выражение «и/или», используемое в настоящем документе в описании и в пунктах формулы изобретения, следует понимать как «одно из или оба» из элементов, объединенных таким образом, т.е. элементов, которые совместно присутствуют в некоторых случаях и отдельно присутствуют в других случаях. Несколько элементов, перечисленных с помощью «и/или», следует понимать в одинаковом смысле, т.е. «один или несколько» элементов, объединенных таким образом. Другие элементы могут присутствовать при необходимости, за исключением элементов, конкретно определенных с оговоркой «и/или», независимо от того, связаны они или не связаны с конкретно определенными элементами.
[00133] Используемое в настоящем документе в описании и в пунктах формулы изобретения «или» следует понимать как имеющее такое же значение, что и «и/или», определенное выше. Например, при разделении пунктов в списке «или» или «и/или» следует интерпретировать как включительные, т.е. включающие по меньшей мере одно, но также включающие более одного, из числа или перечня элементов, и, при необходимости, дополнительные не включенные в перечень пункты. Только термины, которые явно обозначены иным образом, такие как «только один из» или «в точности один из», или, при использовании в пунктах формулы изобретения, «состоящий из», относятся к включению только одного элемента из числа или перечня элементов. Как правило, используемый в настоящем документе термин «или» следует понимать как указание исключающих альтернатив (т.е. «одно или другое, но не оба»), когда им предшествуют условия исключительности, такие как «или один», «один из», «только один из» или «в точности один из».
[00134] Используемую в настоящем документе в описании и пунктах формулы изобретения выражение «по меньшей мере один» по отношению к перечню из одного или нескольких элементов следует понимать в значении по меньшей мере одного элемента, выбранного из любых одного или нескольких элементов в перечне элементов, но необязательно включающего по меньшей мере каждый элемент, конкретно указанный в перечне элементов и не исключая каких-либо комбинаций элементов в перечне элементов. Это определение также допускает, что присутствие элементов необязательно, помимо элементов, конкретно указанных в перечне элементов, к которым относится выражение «по меньшей мере один», независимо от того, присутствует ли связь между ними и определенными элементами или нет.
[00135] Следует также понимать, что, если явным образом не указано иное, в любых заявленных в настоящем документе способах, которые включают более одного этапа или действия, порядок этапов или действий способа не обязательно ограничен порядком, в котором перечислены этапы или действия способа.
[00136] В пунктах формулы изобретения, как и в вышеприведенном описании, все переходные выражения, такие как «содержащий», «включающий», «имеющий», «содержащий в себе», «включающий в себя», «удерживающий», «имеет в составе» и т.п., следует понимать как открытые, т.е. означающие процесс включения, но не ограничения ими. Только переходные выражения «состоящий из» и «состоящий по существу из» являются закрытыми или полузакрытыми переходными выражениями, соответственно, как указано в Руководстве Патентного ведомства США по процедурам патентной экспертизы, раздел 2111.03.
[00137] Несмотря на то, что выше было описано и изображено несколько вариантов реализаци изобретения, специалистам в данной области техники с легкостью станет ясно множество других средств и/или конструкций для выполнения функции и/или получения результатов, и/или одного или нескольких из описанных в настоящем документе преимуществ, при этом каждое такое изменение и/или модификацию следует рассматривать в пределах объема вариантов реализации изобретения, раскрытых в настоящем документе. В более широком смысле, специалистам в данной области техники будет ясно, что все параметры, размеры, материалы и/или конфигурации, описанные в настоящем документе, приведены в качестве примера, и что фактические параметры, размеры, материалы и/или конфигурации будут зависеть от конкретного применения или применений, для которых используют решение, представленное в настоящем изобретении. Специалисты в данной области техники поймут или смогут установить, используя не более, чем рутинные эксперименты, множество эквивалентов конкретных вариантов реализации изобретения, описанных в настоящем документе. Таким образом, следует понимать, что вышеприведенные варианты реализации представлены лишь в качестве примера и что в рамках объема прилагаемой формулы изобретения и ее эквивалентов изобретения могут быть реализованы на практике иным образом, отличающимся от конкретно описанного и заявленного. Варианты реализации изобретения, раскрытые в настоящем описании, отностся к каждому отдельному признаку, системе, изделию, материалу, набору и/или способу, описанным в настоящем документе. Кроме того, любая комбинация двух или более таких признаков, систем, изделий, материалов, наборов и/или способов, если такие признаки, системы, изделия, материалы, наборы и/или способы не являются взаимно несовместимыми, включена в объем настоящего изобретения.
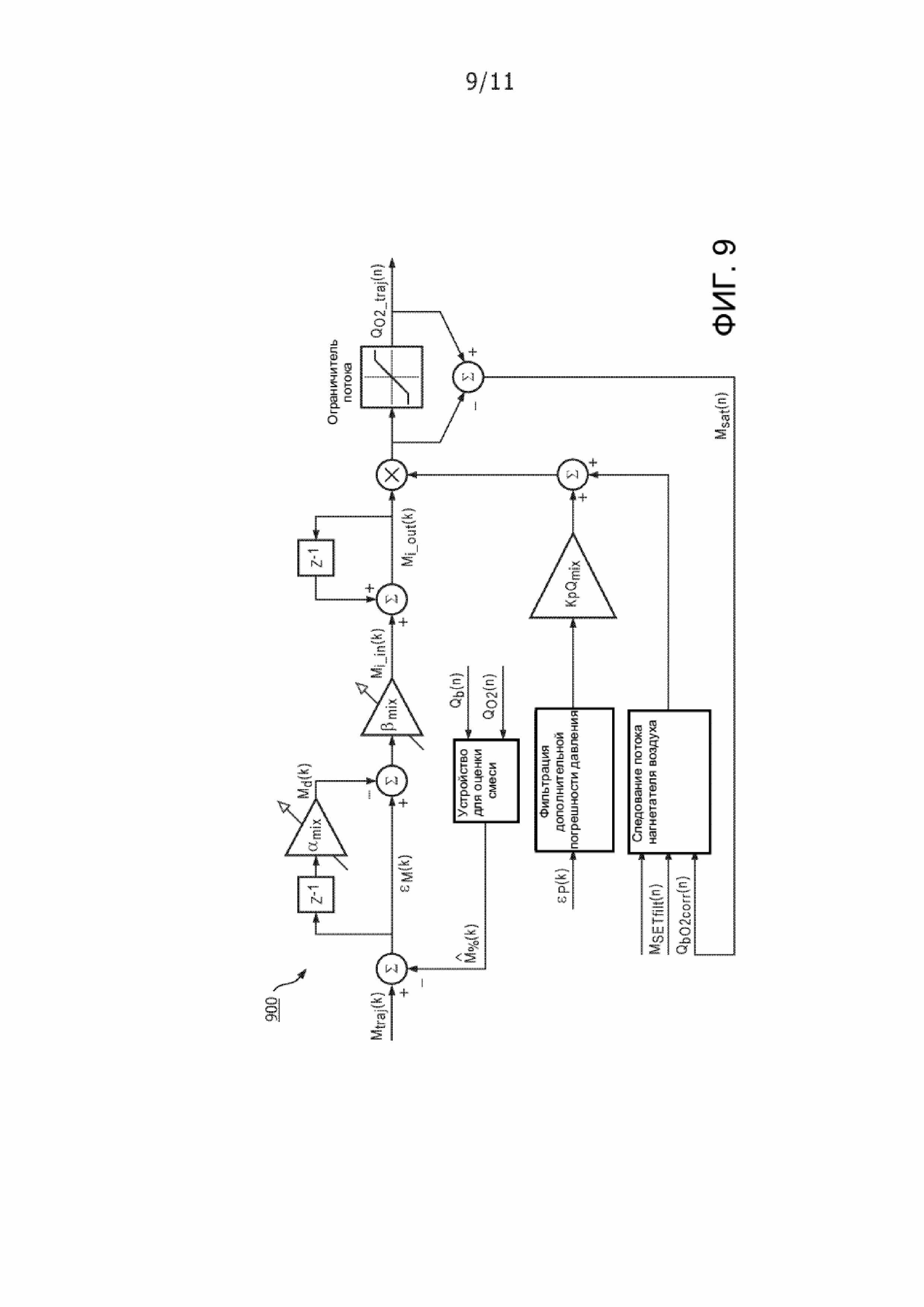
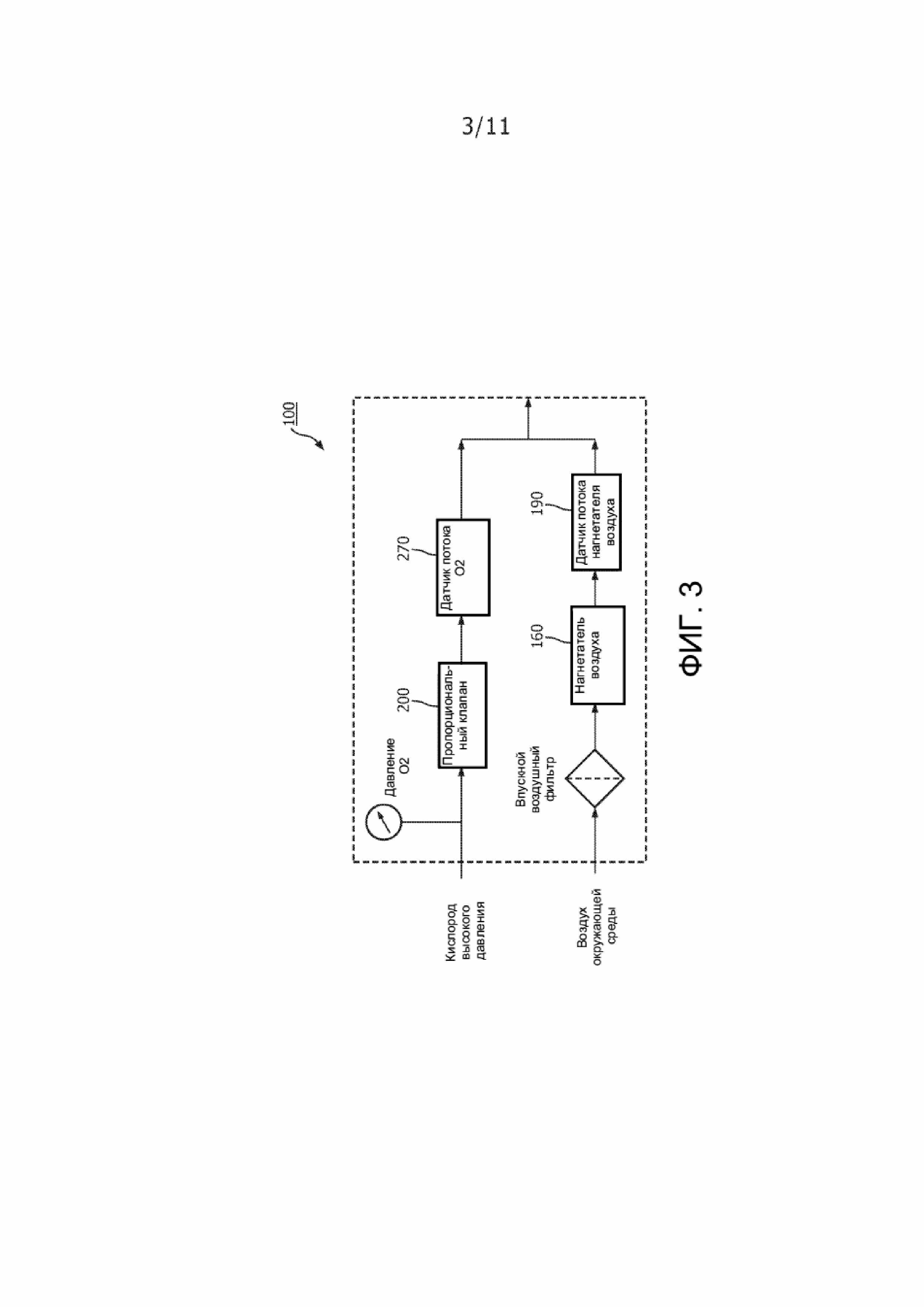
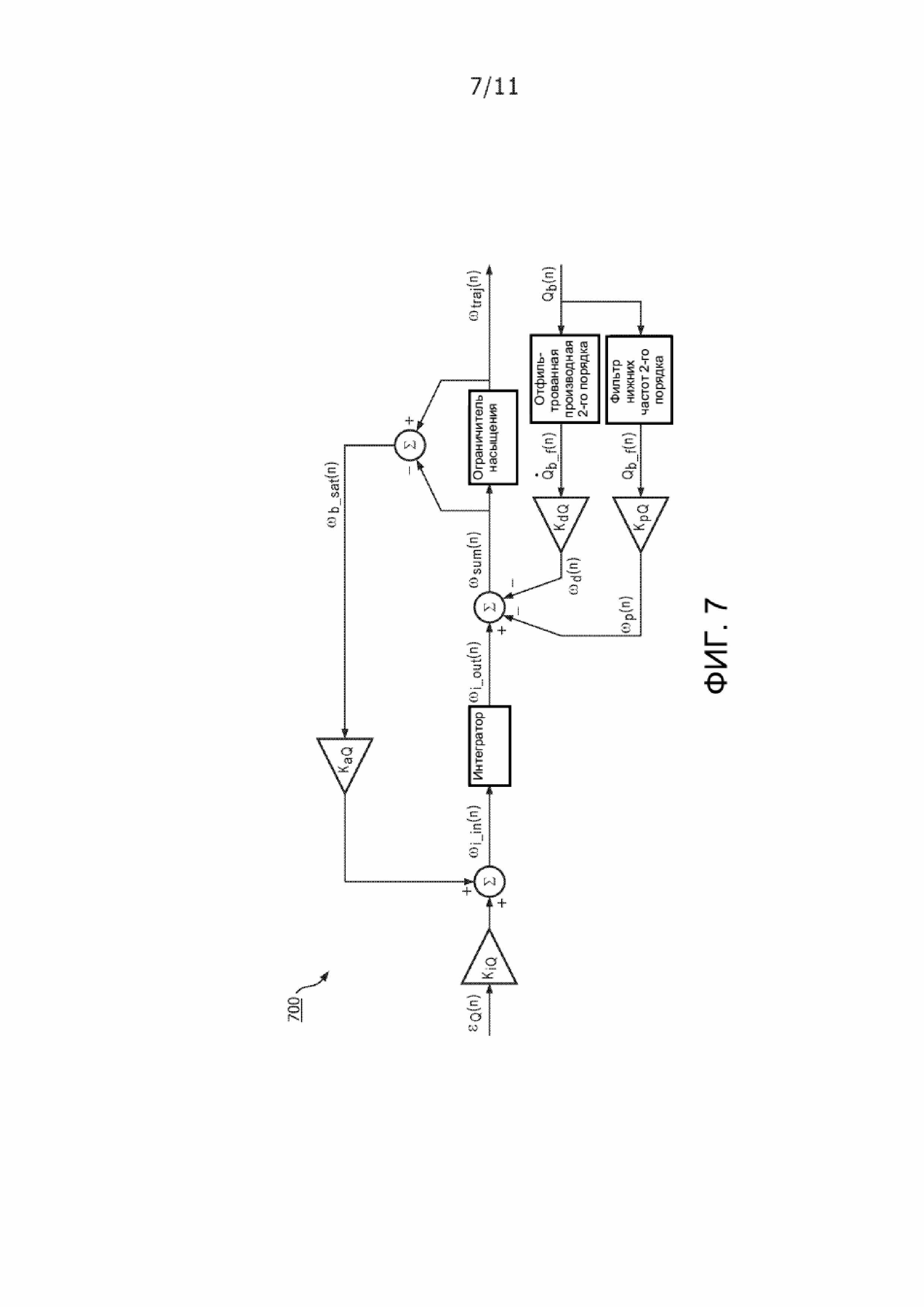
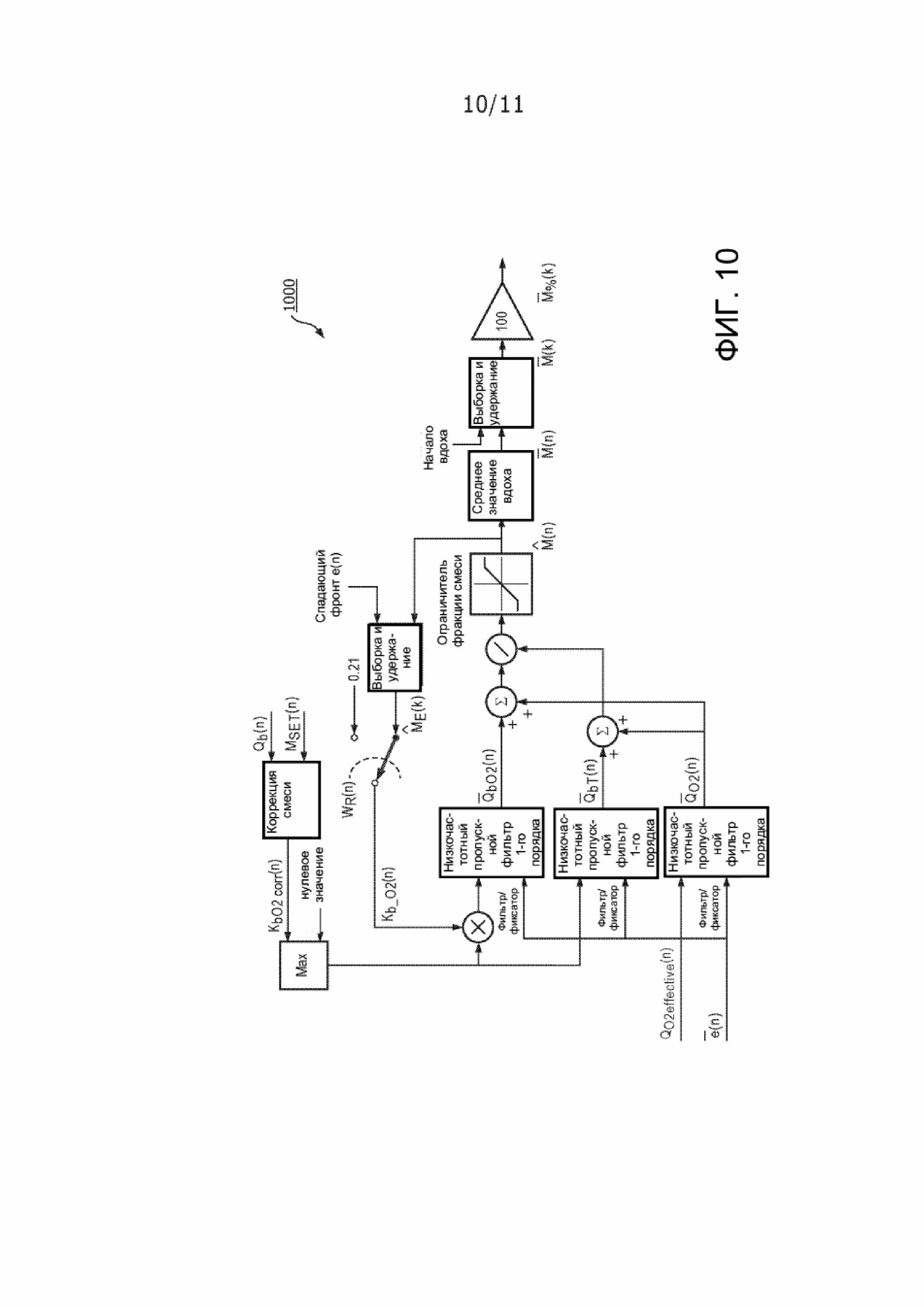
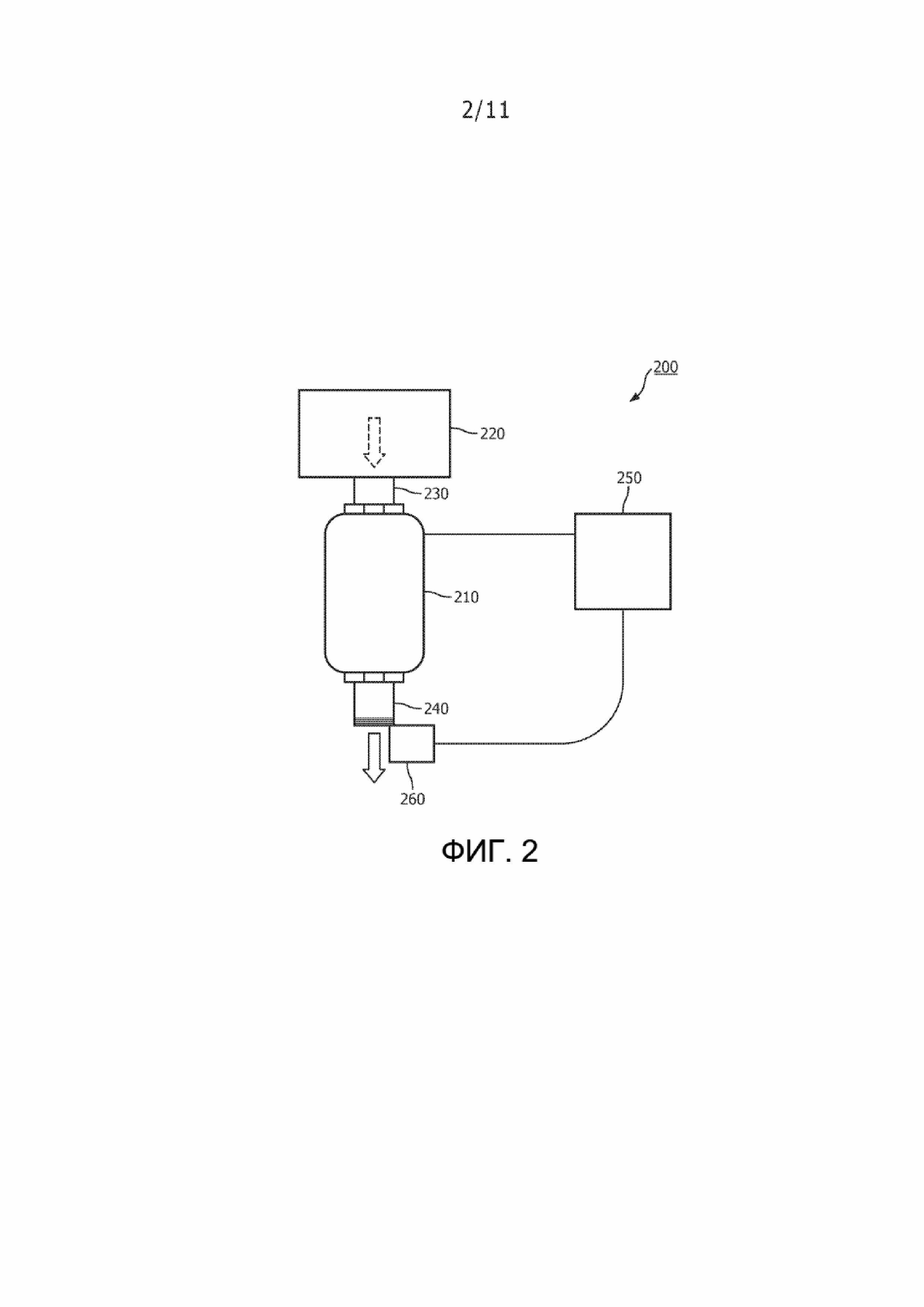
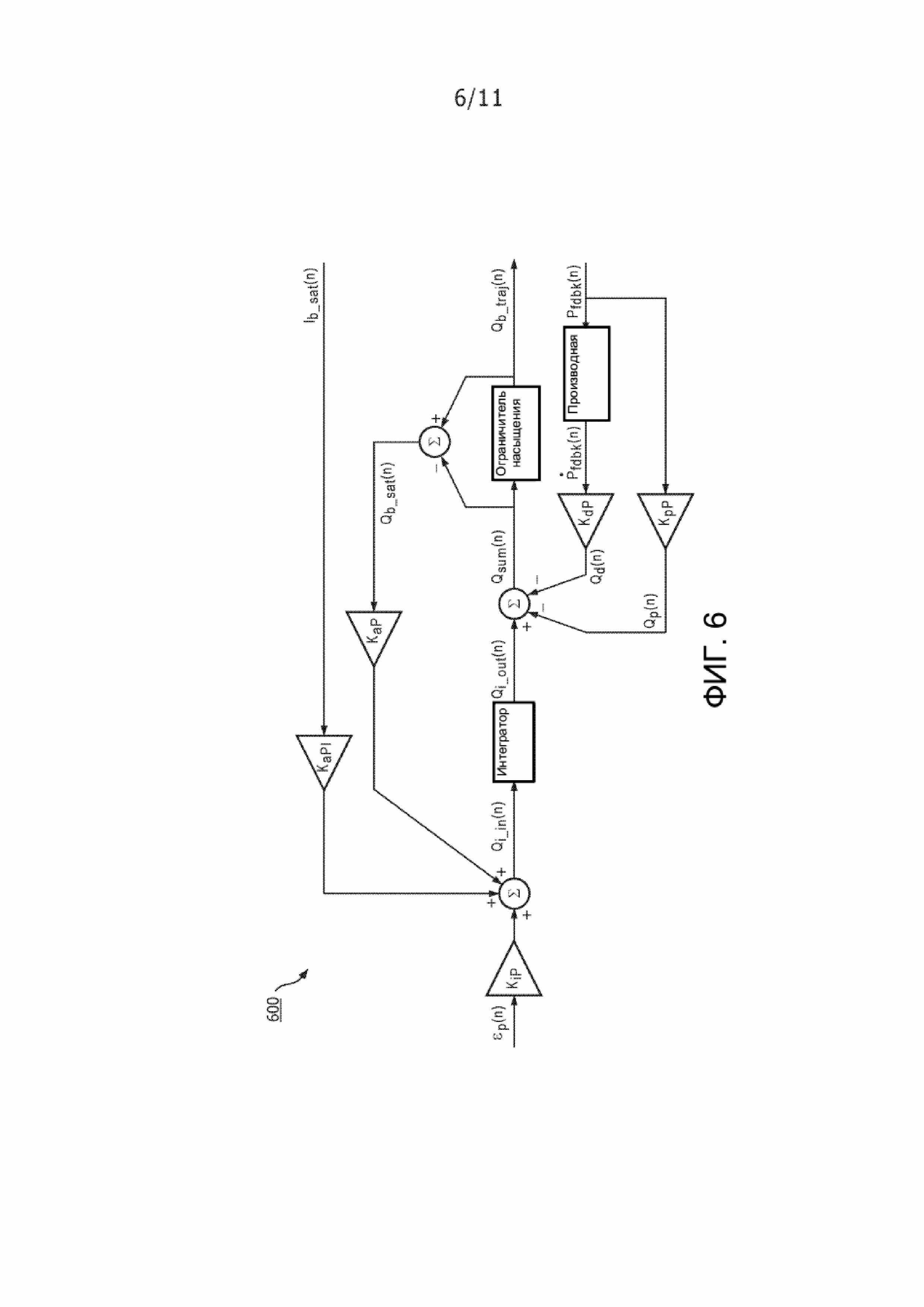
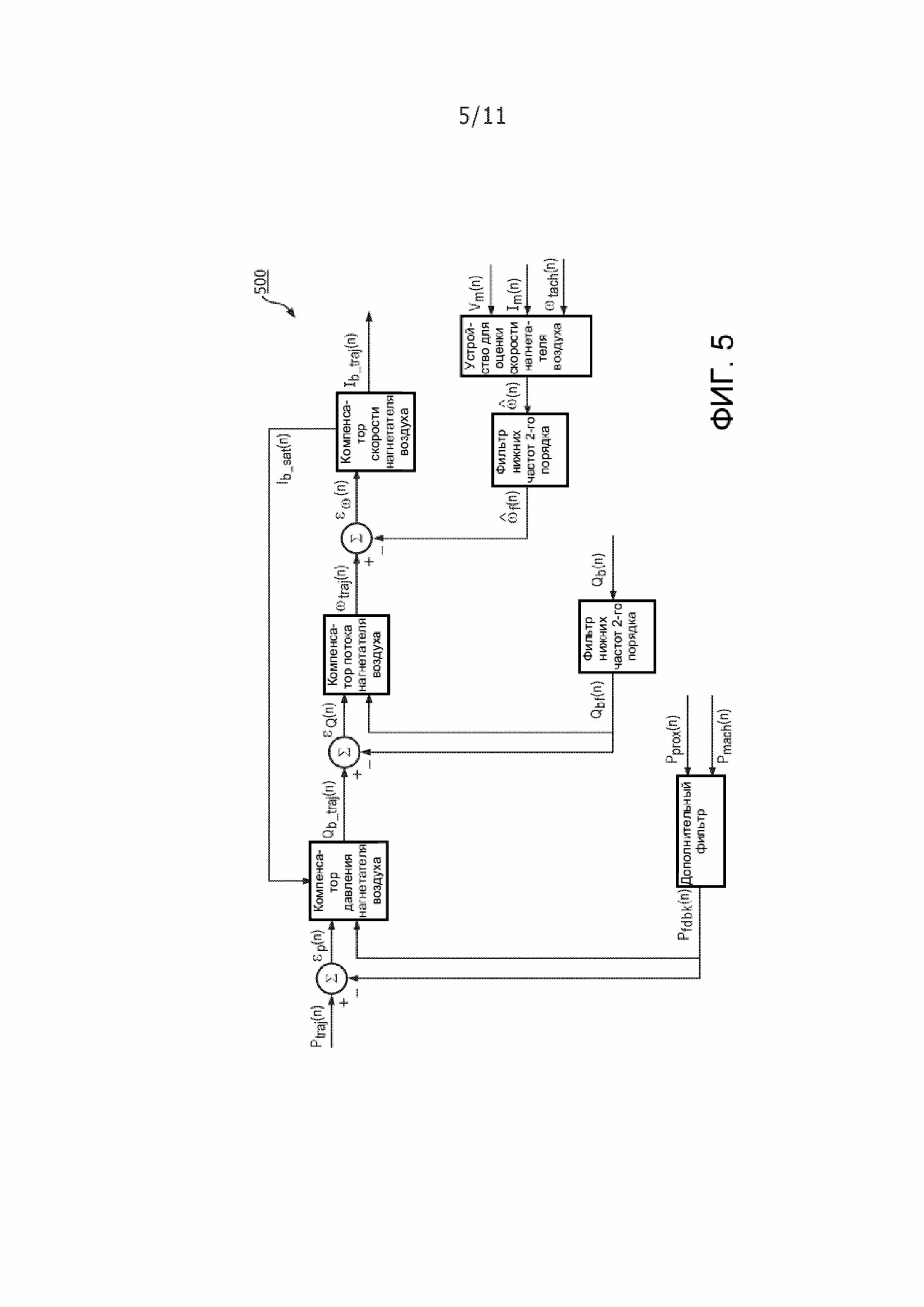
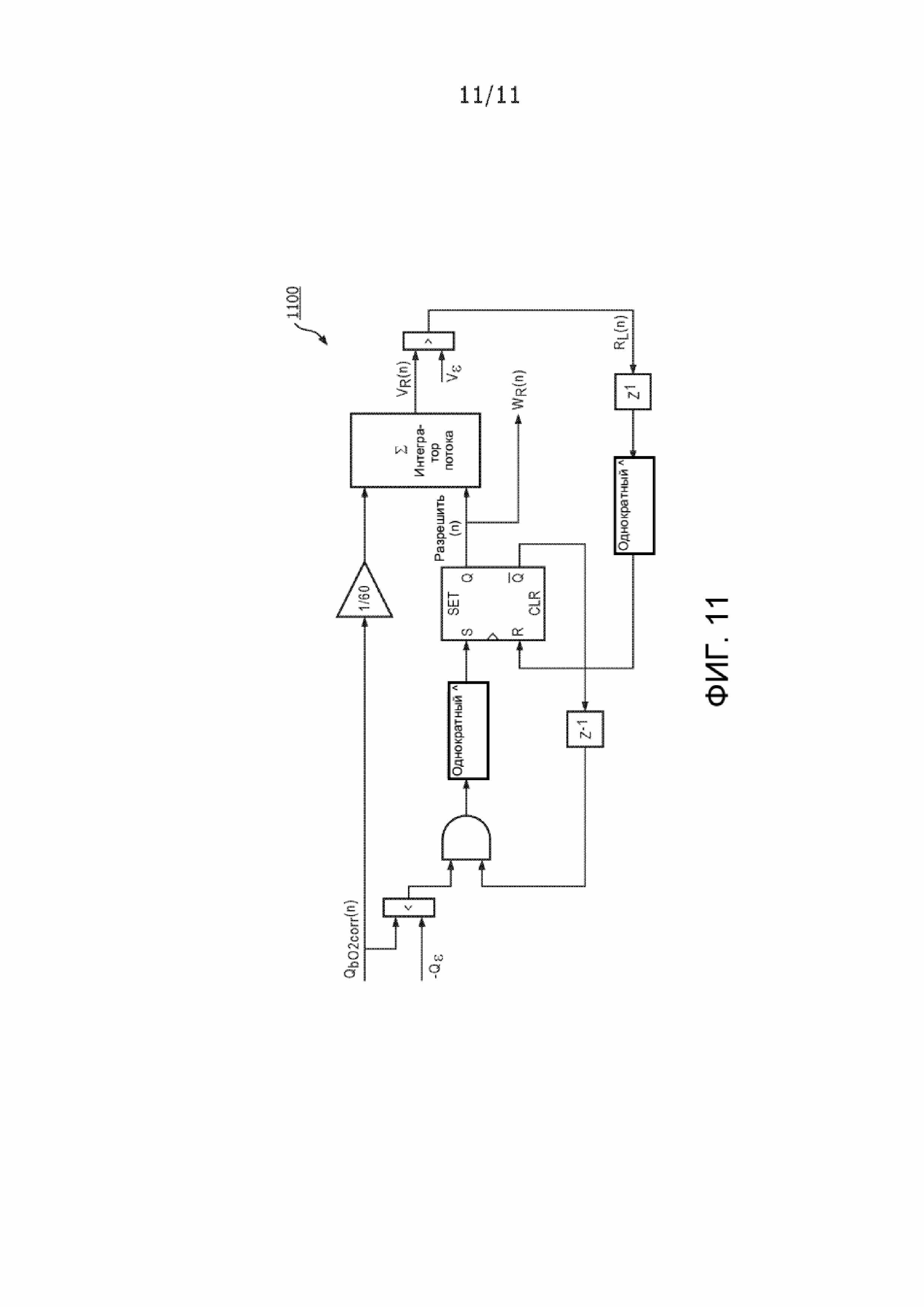
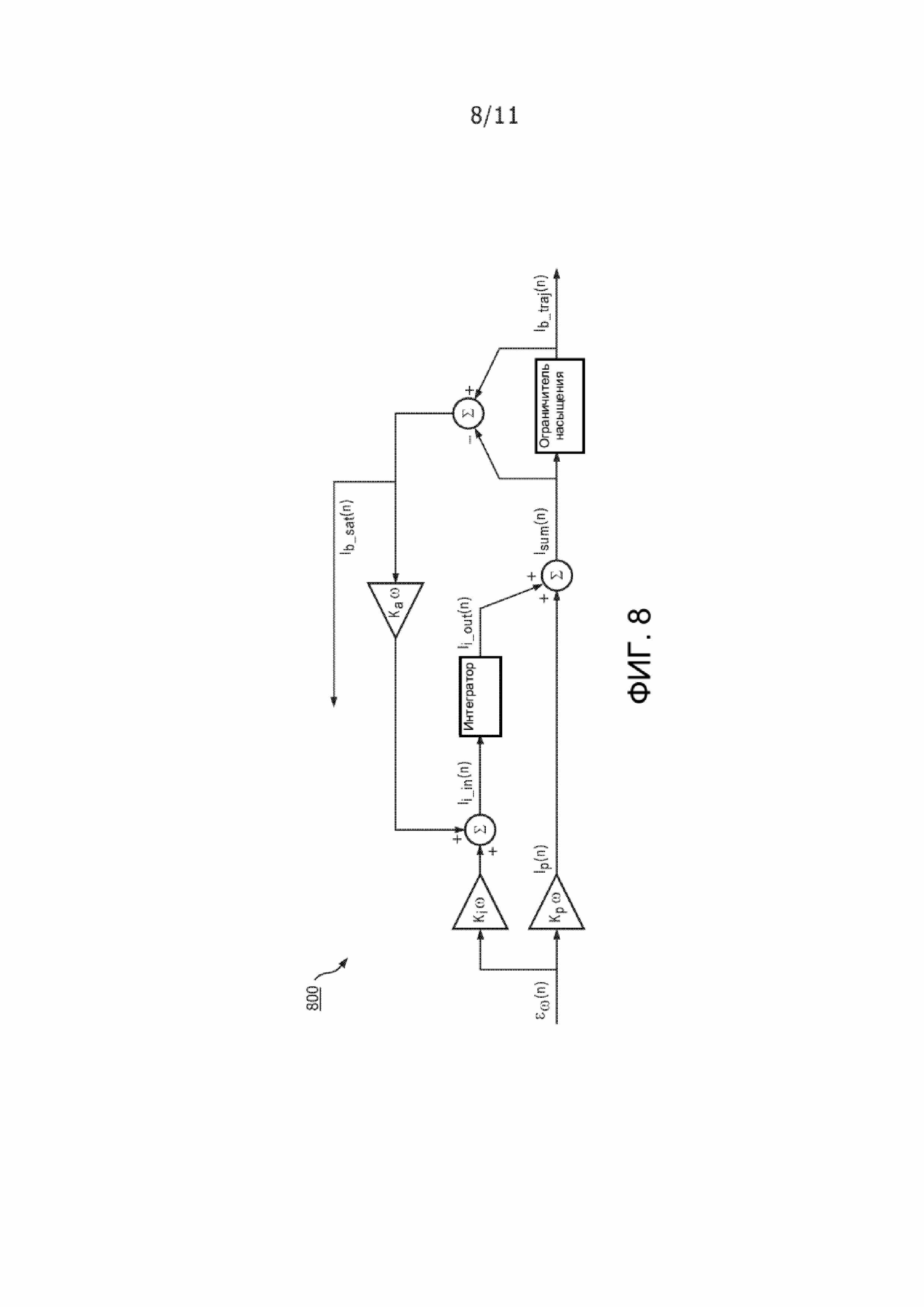
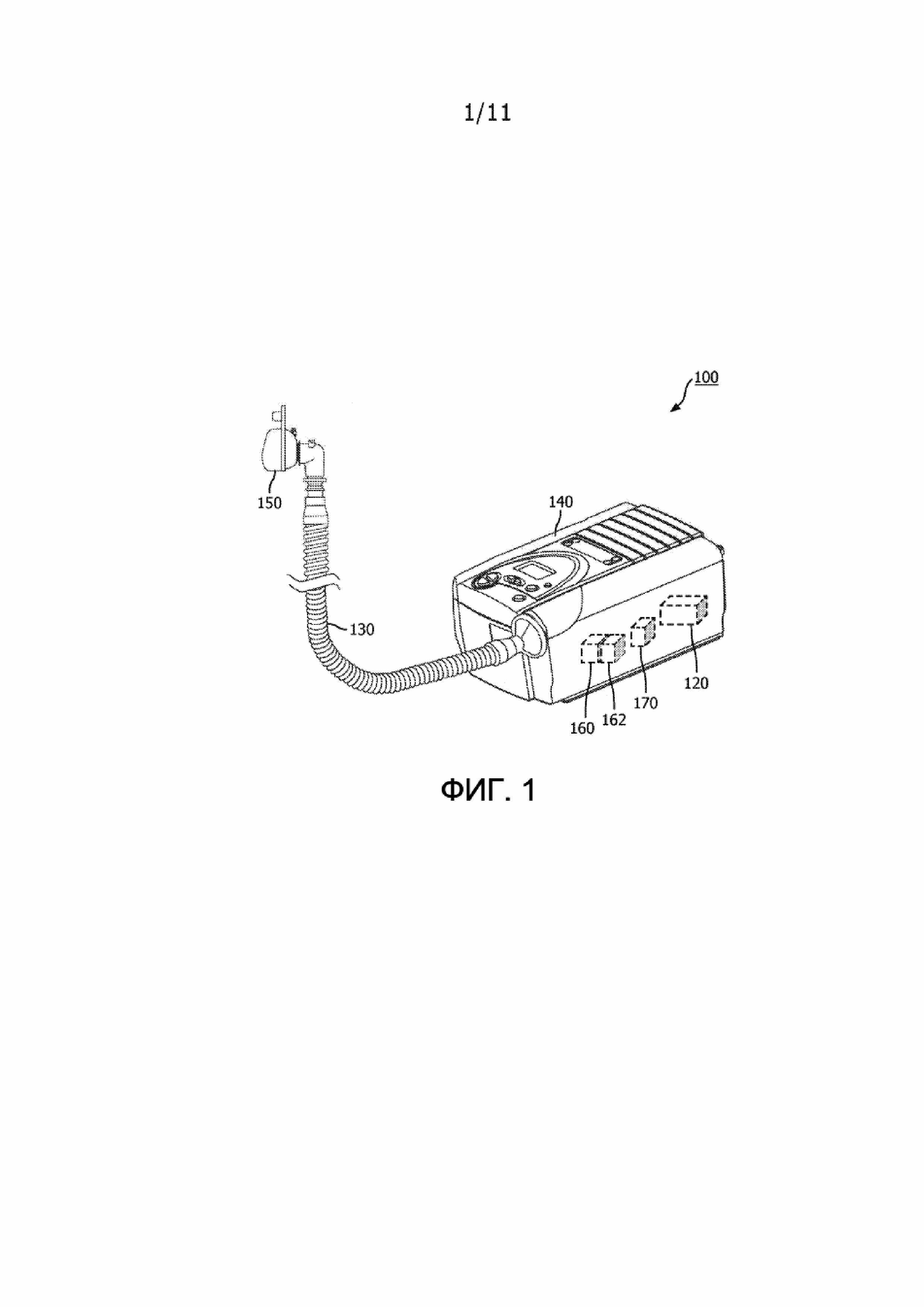
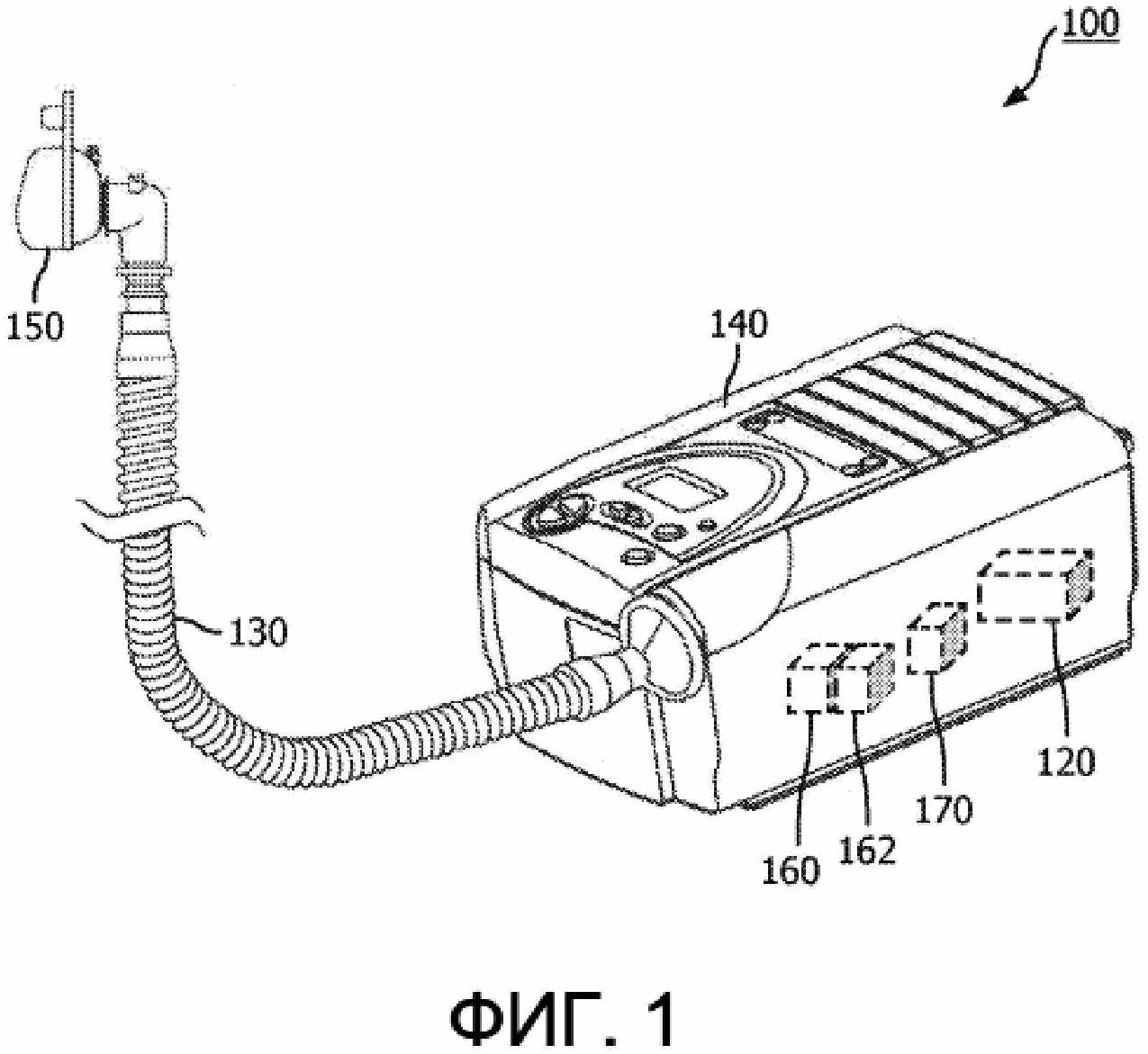
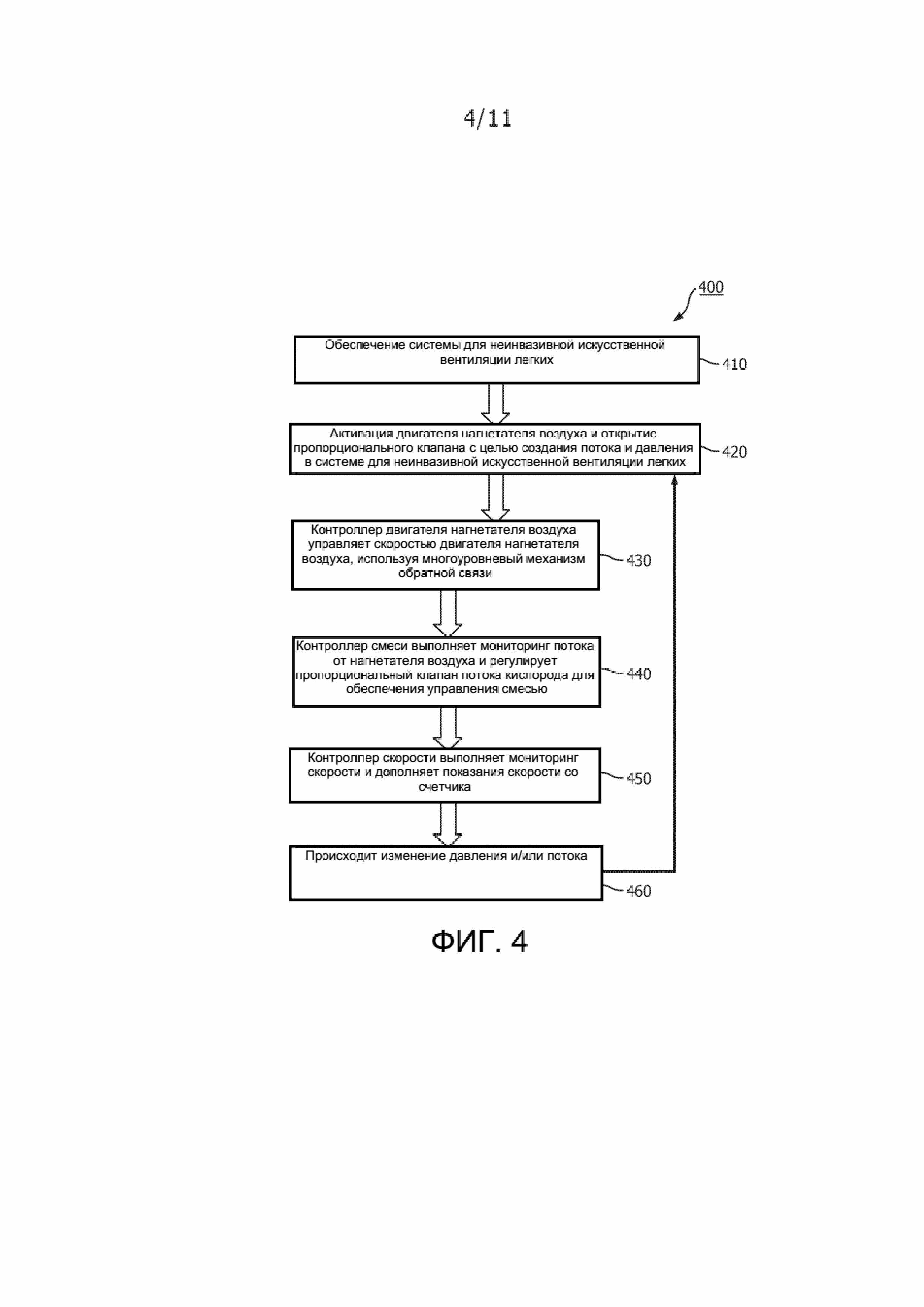
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия

