Результат интеллектуальной деятельности: ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР
Вид РИД
Изобретение
Изобретение относится к пространственным манипуляторам с несколькими степенями свободы и может быть использовано в автоматических линиях, обрабатывающих центрах и различном технологическом оборудовании, и транспортирующих системах в машиностроении и медицине.
Известен пространственный манипулятор, содержащий основание и подвижную платформу, подвижно соединенные между собой посредством трех расположенных по окружности шарнирных 4-звенных параллелограмных механизмов, звенья которых образуют замкнутые кинематические цепи с податливыми четырехсторонними замкнутыми контурами (Clavel R. Device for the movement and positioning of an element in space/Устройство для движения и позиционирования зажатого элемента в пространстве. United States Patent No.4.975.582 от 1990 г.) - аналог.
Недостатками известного пространственного манипулятора являются:
1. Ограниченная зона рабочего пространства манипулятора из-за возможности перемещения подвижной платформы с рабочим органом или деталью только в трех направлениях (из шести возможных в пространстве) из-за малого числа степеней его свободы W, равного только трем (W=3).
2. Низкая жесткость и точность позиционирования, а также низкая нагрузочная способность из-за наличия выполнения замкнутой цепи манипулятора с податливыми под рабочей нагрузкой четырехсторонними замкнутыми контурами.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению, является пространственный платформенный манипулятор, содержащий опорное основание и подвижную платформу, шарнирно соединенные между собой посредством трех установленных двухзвенных стержневых поворотных опор, образующих с опорным основанием и подвижной платформой замкнутую кинематическую цепь, в которой опорное основание и подвижная платформа выполнены в виде симметрично установленных между собой равносторонних треугольников, где каждая из вершин подвижной платформы шарнирно соединена с одной вершин опорной платформы посредством множества вращательных кинематических пар, образующих замкнутые кинематические цепи с податливыми шестисторонними замкнутыми контурами пространственного механизма (схема пространственного платформенного манипулятора в статье Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизма)»/Вестник Сибирского государственного аэрокосмического университета, 2012. Вып. О.С. 46-50, рис. 1) - прототип.
Недостатками указанного пространственного платформенного манипулятора являются:
1. Сложность системы управления и большие габариты манипулятора из-за необходимости применения электромеханических приводов формирования положения каждой поворотных опор.
2. Ограниченная зона рабочего пространства манипулятора из-за возможности перемещения подвижной платформы с рабочим органом или деталью только в трех направлениях (из шести возможных в пространстве) из-за малого числа степеней его свободы W, равного только трем (согласно представленного в этой статье расчета W по известной в ТММ формуле Чебышева-Малышева получено значение W=3).
3. Низкая жесткость и точность позиционирования, а также нагрузочная способность из-за выполнения замкнутой цепи манипулятора с податливыми под рабочей нагрузкой шестисторонними шарнирными замкнутыми контурами.
В основу изобретения положена техническая задача, заключающаяся в увеличение рабочего пространства манипулятора за счет увеличения числа степеней свободы для перемещения в окружающем пространстве подвижной платформы с установленным на ней рабочим органом или деталью, а также повышение жесткости и точности позиционирования манипулятора в сочетании с увеличением его нагрузочной способности.
Получение технического результата достигается за счет того, что пространственный платформенный VIP-манипулятор содержит опорное основание и подвижную платформу, шарнирного соединенные между собой посредством установленных между ними стержневых подвижных опор и выполненных в виде развернутых друг относительно друга на угол β=60° равносторонних треугольников, каждая из вершин подвижной платформы шарнирно соединена с двумя соседними вершинами опорной платформы через соединение каждой пары из шести стержневых подвижных опор посредством двойных сферических шарниров с общей осью их вращения, образующих трехсторонние замкнутые контуры пространственного механизма. Стержневые подвижные опоры снабжены устройством изменения их длины в виде самотормозящейся винтовой пары и/или подвижного гидроцилиндра. Замкнутая кинематическая цепь манипулятора выполнена в виде многорядного, например, двухрядного устройства, образованного путем последовательного соединения между собой отдельных платформенных пространственных механизмов посредством симметричного закрепления опорного основания одного из пространственных механизмов на подвижной платформе другого пространственного механизма.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
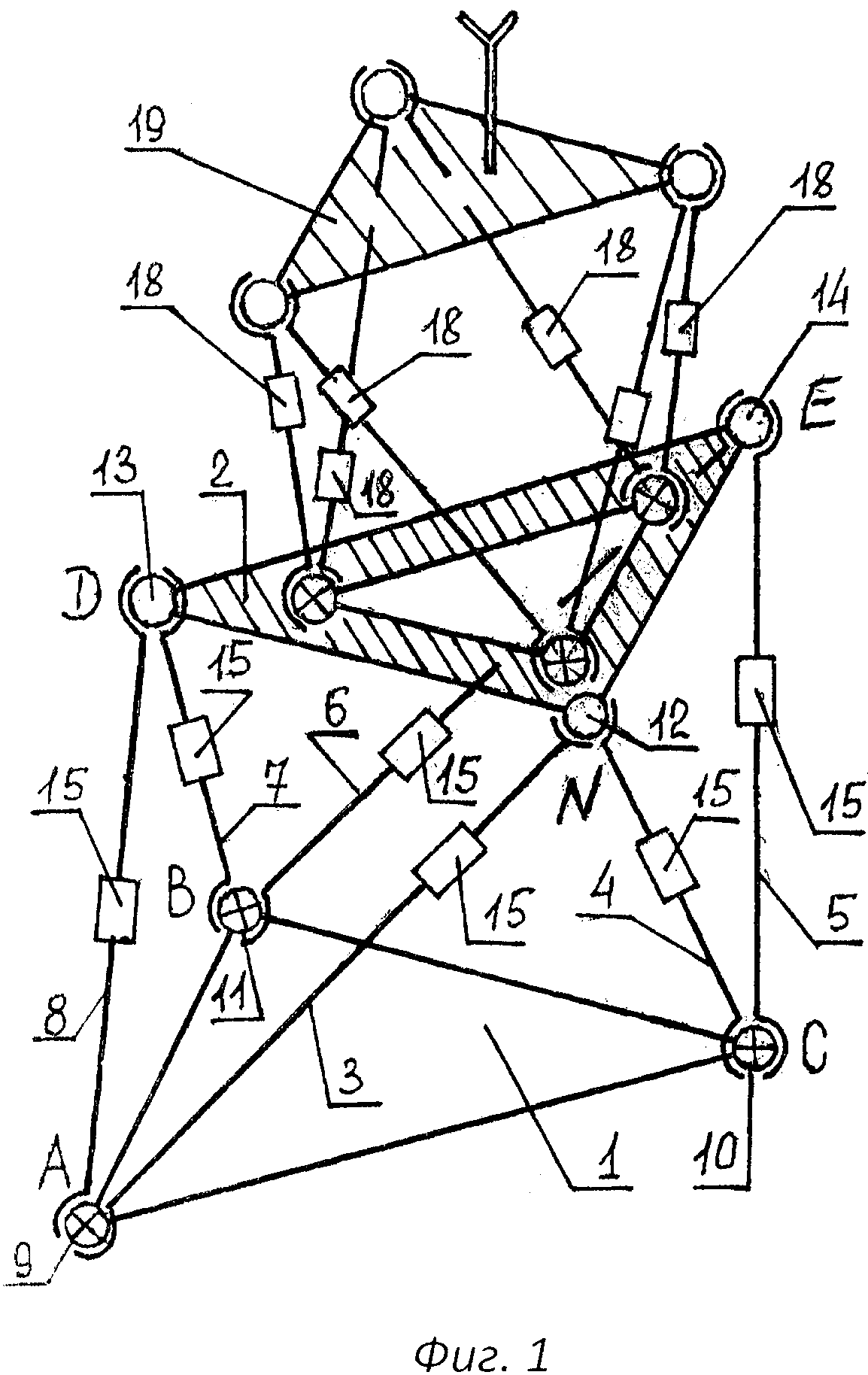
На фиг. 1 изображен общий вид пространственного платформенного VIP-манипулятора, содержащего опорное основание 1 с вершинами А, В, С и подвижную платформу 2 с вершинами D, Е, N, шарнирно соединенных между собой посредством установленных между ними шести стержневых подвижных опор 3, 4, 5, 6, 7 и 8. Опорное основание 1 и подвижная платформа 2 выполнены в виде развернутых друг относительно друга на угол β=60° равносторонних треугольников ABC и DEN, каждая из вершин D, Е и N подвижной платформы 2 шарнирно соединена с двумя соседними вершинами А, В и С опорной платформы 1 через соединение каждой пары из шести стержневых подвижных опор 3, 4, 5, 6, 7 и 8 посредством шести двойных сферических шарниров 9, 10, 11, 12, 13 и 14 с общей осью их вращения, образующих трехсторонние замкнутые контуры пространственного механизма в виде ANC, CNE, СЕВ, EBD, DBA и DAN. Каждый из трех указанных двойных сферических шарниров 12, 13 и 14 на вершинах D, Е и N подвижной платформы 2 выполнен в виде шестиподвижного сферического соединительного устройства, а каждый из трех других сферических шарниров 9, 10 и 11 на вершинах А, В и С опорного основания 1 выполнен в виде четырехподвижного соединительного устройства, образованного соединением двух стержневых подвижных опор с опорным основанием 1 через крестовину с четырьмя вращательными кинематическими парами. Стержневые подвижные опоры 3, 4, 5, 6, 7 и 8 снабжены устройством изменения их длины 15, которое может быть выполнено в виде винтовой самотормозящейся кинематической пары 16 или/и подвижного гидроцилиндра 17.
Замкнутая кинематическая цепь VIP-манипулятора может быть выполнена в виде многорядного, например, двухрядного устройства (фиг. 1), образованного последовательным соединением между собой отдельных платформенных пространственных механизмов путем симметричного закрепления опорного основания одного из пространственных механизмов (например, с устройством 18 изменения длины его опор) на подвижной платформе другого пространственного механизма (например, с устройством 15 изменения длины его опор).
Для каждого из указанных на фиг. 1 пространственных платформенных механизмов, содержащих по 8 звеньев (6 подвижных опор и 2 треугольных платформы) и по 6 двойных сферических шарниров, согласно известной в ТММ формуле Чебышева-Малышева число степеней каждого из этих механизмов W1=6, W2=6, а общее число степеней свободы всего двухрядного устройства манипулятора будет равно их сумме, т.е. W∑=W1+W2=6+6=12.
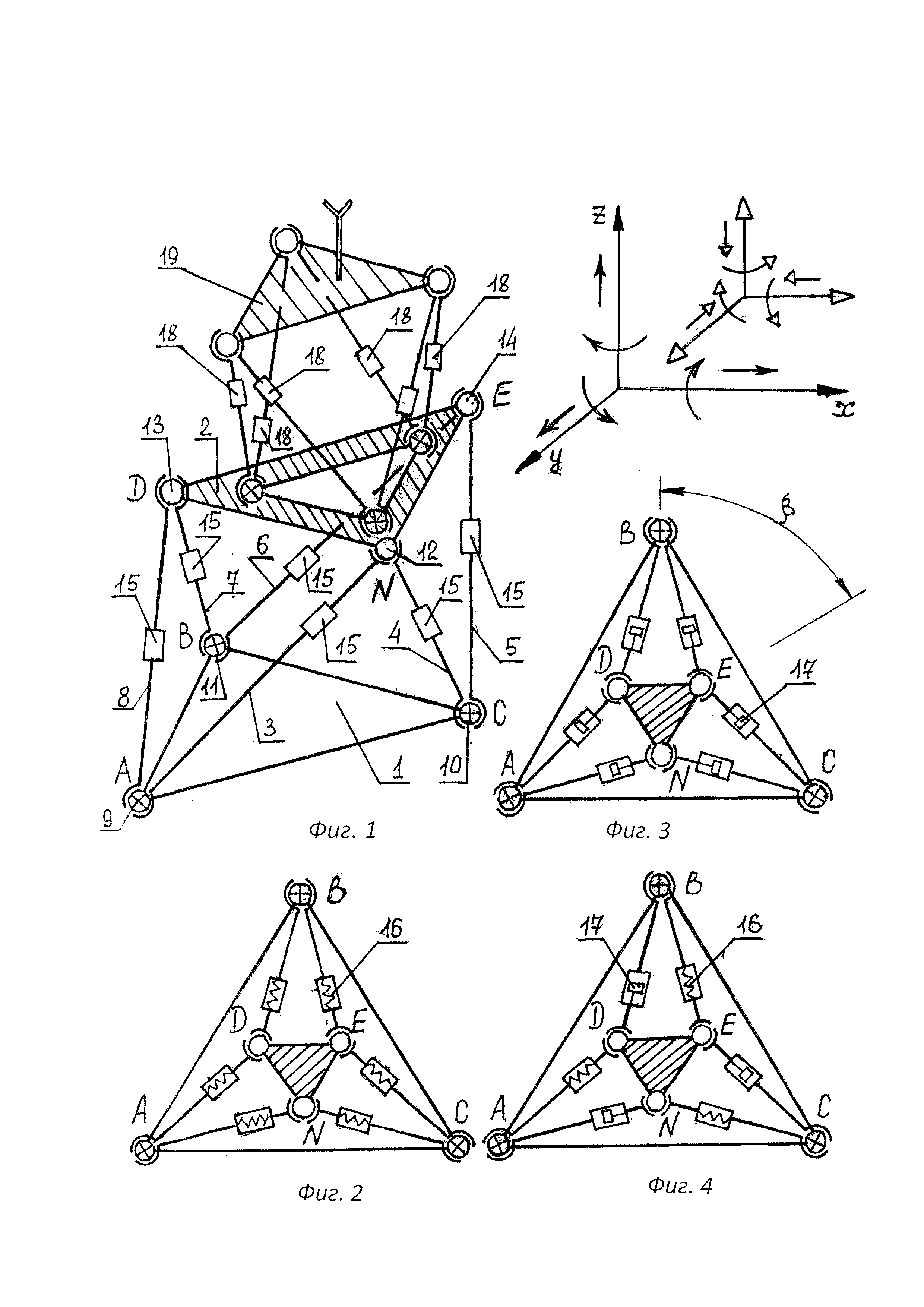
На фиг. 2 представлен вариант выполнения устройства изменения длины стержневых подвижных опор в виде винтовых самотормозящих кинематических пар 16.
На фиг. 3 представлен вариант выполнения устройства изменения длины стержневых подвижных опор в виде подвижных гидроцилиндров 17.
На фиг. 4 представлен вариант выполнения устройства изменения длины стержневых подвижных опор в виде установленных в каждом из трехсторонних замкнутых контуров манипулятора и смонтированных на смежных стержневых подвижных опорах посредством чередования между собой винтовой самотормозящейся кинематической пары 16 на одной стержневой подвижной опоре и подвижного гидроцилиндра 17 на другой соседней стержневой подвижной опоре.
Работа представленного пространственного платформенного VIP-манипулятора заключается в следующем.
При изменении длины каждой из шести стержневых подвижных опор посредством винтовых самотормозящихся кинематических пар 16 и подвижных гидроцилиндров 17 в каждом из соединяемых пространственных механизмов (рис. 1) реализуются все 6 возможных в системе координат «x-y-z» движений подвижной платформы (т.е. три вращательных вокруг осей x, у, z и три поступательных относительно вдоль осей x, у, z). В результате сложения всех этих движений подвижная платформа на выходе двурядного манипулятора будет иметь 12 степеней свободы.
Достигаемый в предлагаемом пространственном платформенной VIP-манипуляторе положительный эффект заключается в следующем:
1. Обеспечивается увеличение рабочей зоны обслуживания манипулятора за счет увеличения до W∑=12 числа реализуемых степеней свободы при перемещении выходной подвижной платформы с рабочим органом.
2. Повышается жесткость, точность позиционирования и нагрузочная способность манипулятора за счет замыкания всех его звеньев в трехсторонние жесткие замкнутые контуры во всей его цепи (ANC, CNE, СЕВ, EBD, DBA, DAN).
Многократный цилиндрический шарнир
Складывающийся шарнирный манипулятор
Многократный цилиндрический шарнир
Складывающийся шарнирный манипулятор

