Результат интеллектуальной деятельности: ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
Изобретение относится к области машиностроения и касается особенностей конструктивного выполнения электротранспорта, в частности - электромобилей с приводом от асинхронного электродвигателя через ременный редуктор, системы управления электродвигателями и может быть использовано в различных областях техники, например, в качестве силовой установки в таких транспортных средствах, как электроприводные скутеры, мотоциклы, квадроциклы, снегоходы, автомобили общего пользования, грузового транспорта и т.д.
Уровень техники
Многообразие известных схем, конструкций и компоновочных решений тяговых приводов электромобилей укладывается в рамки трех основных вариантов:
центральный электродвигатель плюс редуктор плюс межколесный механический дифференциал (подварианты с задним, передним и разнесенным их расположением);
два бортовых электродвигателя, по одному на каждое ведущее колесо (подварианты с задним и передним расположением);
электромотор-колеса (подварианты с двумя и четырьмя мотор-колесами).
Наиболее распространены и считаются перспективными электромобили с приводом по первому варианту, в том числе с комбинированными силовыми установками (FR N 2200800 A, B 60 K 17/00, 1974; US N 3888325 A, B 60 K 1/00, 1975).
Такое традиционное применение электродвигателей устанавливается на автомобилях различных концернов, таких как Мерседес, БМВ, Тесла и др.
Известен вариант привода электромобиля (SU 1724486), содержащий индивидуальные приводы колес, каждый из которых образует единую компоновку с редуктором и колесом, редуктор выполнен в виде планетарной прецессионной передачи, сателлит которой содержит два роликовых венца, жестко связанных между собой, между которыми на телах качения размещено кольцо, на наружной поверхности которого выполнена однопериодная синусоидальная канавка, взаимодействующая с пьезопреобразователями, которые содержат генераторы окружных и осевых колебаний, установленные в ступице колеса, при этом центральное колесо прецессионного редуктора связанно со ступицей колеса, а центральное ведомое колесо с его ободом.
Причинами, по которым нельзя достичь технического результата является то, что конструкция сложна, дорогостоящая и использует электродвигатель постоянного тока, ряд недостатков, для которых необходимы большие пусковые и переходные токи при трогании и ускорении транспортного средства или обычный асинхронный двигатель, которые имеют проблемы страгирования на старте или момента при разгоне.
Известен вариант привода электромобиля (RU 2146623), содержащий систему управления и центральный тяговый трехфазный асинхронный электродвигатель с двумя роторами, соосно установленными в расточке неподвижного однопакетного статора с возможностью вращения друг относительно друга на оппозитных валах, внешние концы которых соединены с редукторами, отличающийся тем, что система управления, по меньшей мере, частично расположена в П-образной нише между электродвигателем и редукторами, при этом электродвигатель, редукторы и система управления совместно образуют агрегат.
Причинами, по которым нельзя достичь технического результата является то, что конструкция содержит обычный асинхронный двигатель, которые имеют проблемы страгирования на старте или момента при разгоне и имеет высокое потребление энергии.
Второй вариант привода реализован, в частности, в электромобиле Impact, разработанном концерном General Motors (Автомобильная промышленность США, 1990, N 5. - С.7-9). В нем два электродвигателя переднего расположения определяют завышенные габаритно-массовые и стоимостные показатели. В то же время, несомненным достоинством этого привода следует признать использование перспективных асинхронных электродвигателей (по 42,5 кВт каждый) с регулируемым инвертором в составе системы управления приводом.
Причинами, по которым нельзя достичь технического результата является то, что система дорогая и массогабаритная.
Третий вариант направлен на разработку различных мотор-колес (патенты WO 93/08999 А1, 13.05.93, US 6384496 B1, 07.05.2002; US 6617746 B1, 09.09.2003; RU 2129965 C1, 10.05.1999; RU 2172261 C1, 20.08.2001).
Причинами, по которым нельзя достичь технического результата является то, что описанные мотор-колеса и все известные его разновидности образуют электродвигатель постоянного тока и имеют ряд недостатков, главный из которых заключается в необходимости больших пусковых и переходных токов при трогании и ускорении транспортного средства. Это приводит к быстрому износу и порче аккумуляторов и ухудшению теплового режима. Другим недостатком является недостаточно эффективное возвращение и использование электроэнергии. Также названные электродвигатели имеют низкий крутящий момент, что существенно ограничивает область их практического использования.
Имеющееся мотор-колесо асинхронного типа (патент RU № 2156191, опубл. 20.09.2000) более перспективно, техническое решение очень сложное, в нем имеются механические потери, износ самого двигателя и все соответствующие недостатки, включая дороговизну, сложность, проблемы страгивания на старте или момента при разгоне (в зависимости от обмотки - звезда или треугольник).
Известные технические решения, направленные на устранение указанных недостатков, связаны с применением высоковольтных источников питания и сложных схем управления, что делает их дорогостоящими и сложными в изготовлении и малонадежными в эксплуатации (US 6791226 B1, 14.09.2004; US 6727668 B1, 27.04.2004; US 6355996 B1, 12.03.2002).
Причинами, по которым нельзя достичь технического результата является то, что наиболее сложной и тяжело разрешимой проблемой всех мотор-колес является система управления ими, позволяющая обеспечивать функции дифференциала колес без его физического наличия, пробуксовки, сцепления с различной поверхностью.
Известен патент US 20140257613. Данная система применена на электромобиле Тесла.
В качестве электродвигателя используются трехфазные асинхронные двигатели с системой управления, позволяющие моделировать дополнительную синусоиду и создавая четырех полюсной двигатель. Дополнительный полюс увеличивает крутящий момент электродвигателя. Электродвигатели требуют жидкостного охлаждения и высоки потери в редукторной и дифференциальной части передачи крутящего момента.
Известен аналог, который по технической сущности наиболее близок и выбран в качестве прототипа - патент JP 5-276719 A, МПК B60K 17/12, H02K 16/02 1993 г., в котором используется симметричный двухроторный электродвигатель при его центральном, поперечном расположении. Привод электромобиля, содержит систему управления и центральный тяговый электродвигатель с двумя роторами, соосно установленными в расточке неподвижного однопакетного статора с возможностью вращения друг относительно друга на оппозитных валах, внешние концы которых соединены с редукторами, выполнены в виде ременных передач.
Общими признаками является наличие тягового электродвигателя с роторами, имеющими возможность вращения друг относительно друга на оппозитных валах, внешние концы которых соединены с редукторами, выполненными в виде ременных передач.
Причины, по которым нельзя достичь технического результата заключаются в том, что невозможно обеспечить поддержку высокого крутящего момента в широком диапазоне скоростей вращения за счет разгрузки мощности электродвигателя, передающего крутящий момент через ременную передачу, и предотвращение снижения их крутящего момента на компенсацию увеличения мощностных параметров и при высоких оборотах электродвигателя повышающаяся мощность резко снижает крутящий момент для поддержания увеличения скорости движения транспортного средства, а крутящий момент в таком приводе ограничен характеристиками электродвигателя и не имеет возможности повышения характеристик за счет увеличения количества электродвигателей модульным увеличением их количества.
Раскрытие сущности изобретения
Техническая проблема, решаемая изобретением, - разработка асинхронного электропривода, которая направлена на снижение массогабаритных показателей высоконагруженных электроприводов при повышении крутящего момента и мощности в широком диапазоне оборотов электродвигателя, путем применения энергоэффективных тяговых электродвигателей с уменьшением количества механизмов и принципов трения на распределение крутящих моментов через передаточные механизмы, повышением экономичности за счет разгрузки мощности электродвигателей, передающего крутящий момент через ременную передачу, и снижением себестоимости электротранспорта, создания условий для свободного инерционного хода, рекуперации и большой скорости на колесах транспортных средств.
Техническим результатом является достижение высокого крутящего момента в широком диапазоне скоростей транспортного средства при оптимизации мощностных параметров привода.
Технический результат достигается тем, что в известном электроприводе транспортного средства, содержащем тяговый асинхронный электродвигатель с ротором, выходной вал которого соединен с редуктором, выполненным в виде ременной передачи и соединенным с осью колеса, в соответствии с изобретением, электропривод снабжен по крайней мере одним дополнительным тяговым асинхронным электродвигателем со своим однопакетным ротором, вращающимся относительно своего однопакетного статора и имеющим прямой привод на ось колеса транспортного средства, причем выходной вал ротора дополнительного асинхронного двигателя соединен через указанную ременную передачу с выходным валом ротора первого тягового асинхронного электродвигателя, оба асинхронных тяговых электродвигателя выполнены в виде модуля.
Причем роторы электродвигателей содержат независимо попарно короткозамкнутые витки, проходящие в пазах магнитопровода ротора, представляющие собой пары короткозамкнутых стержней, расположенные по периметру ротора, замыкая пары пазов, расстояние между которыми соответствует расстоянию между зонами, прилегающими к границам полюсного деления статора, и зонами, прилегающими к границам половины полюсного деления статора.
Статоры электродвигателей имеют две обмотки статора, собранные одна в звезду, другая в треугольник, большего, чем у стандартного двигателя с одной обмоткой, числа фаз и сложения магнитных полей этих двух обмоток.
Роторы содержащие независимо попарно короткозамкнутые витки, проходящие в пазах магнитопровода ротора, также могут иметь обмотки, собранные в звезду или в треугольник.
В частности, электропривод может содержать только электродвигатели, передающие крутящий момент через ременную передачу, соединенные с дифференциалом привода колес, интегрированным в асинхронный электропривод и механические тормоза, интегрированные в электродвигатели, и работающие совместно и отдельно с электрическим торможением электродвигателями.
Электропривод может содержать более одного тягового асинхронного электродвигателя, выполненного в виде модуля.
Выполнение электропривода, снабженного, по крайней мере, одним дополнительным тяговым асинхронным электродвигателем со своим однопакетным ротором, вращающимся относительно своего однопакетного статора и имеющим прямой привод на ось колеса транспортного средства, у которого выходной вал ротора соединен через указанную ременную передачу с валом ротора первого тягового асинхронного электродвигателя, выполненным в виде модуля, снабженного приемным устройством, позволяет обеспечить достижение высокого крутящего момента в широком диапазоне скоростей транспортного средства при оптимизация мощностных параметров привода с возможностью дополнительного увеличения его мощностных характеристик.
Объединение всех электродвигателей в одну систему управления обеспечивает поддержку высокого крутящего момента в широком диапазоне скоростей вращения за счет разгрузки мощности электродвигателей, передающих крутящий момент через ременную передачу, и предотвращение снижения их крутящего момента на компенсацию увеличения мощностных параметров, мощностью электродвигателей имеющих прямой привод и вращающихся с меньшей скоростью пропорционально передаточному числу ременной передачи и сохраняющих крутящий момент при более высоких оборотах колес транспортного средства.
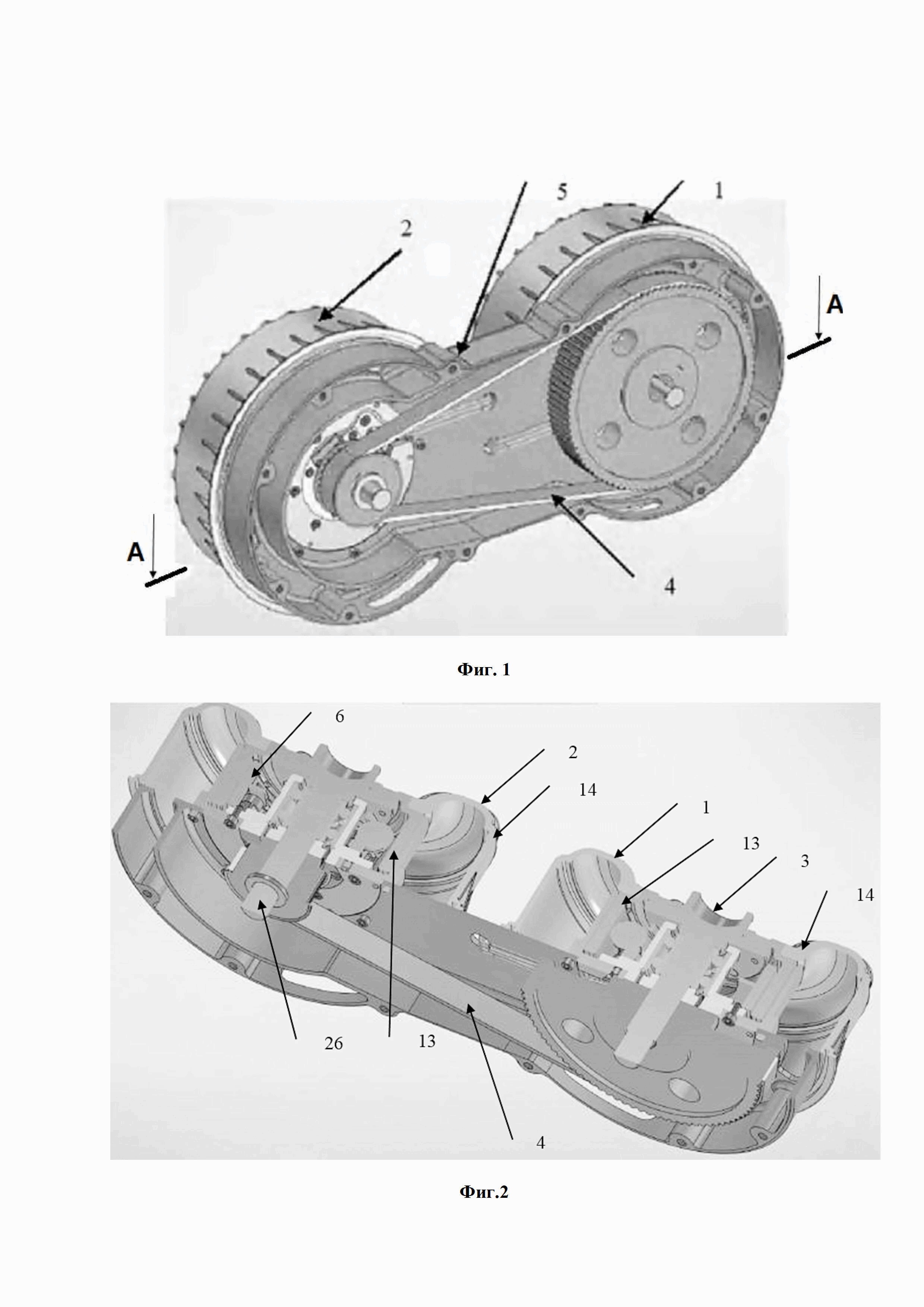
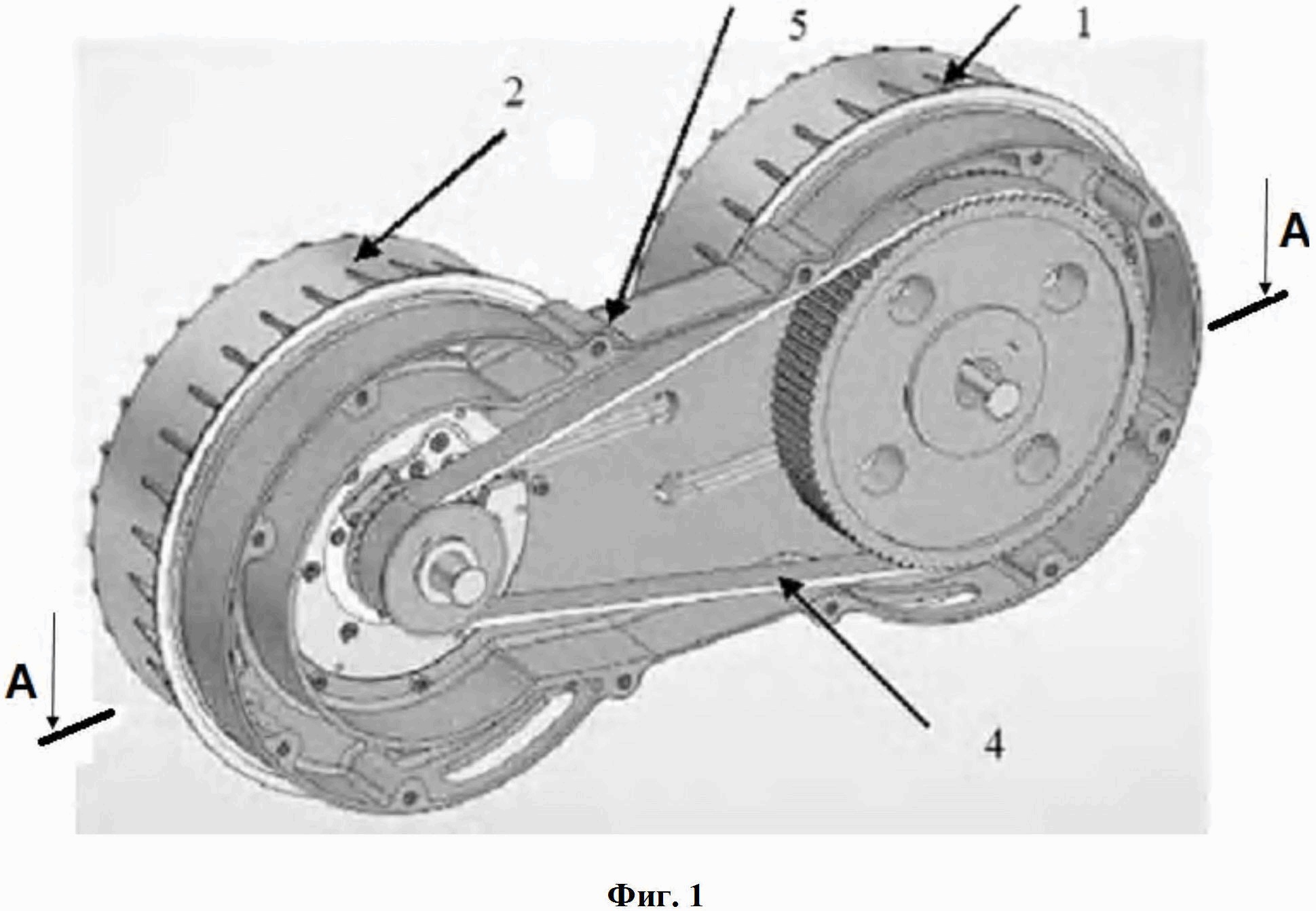
Сущность технического решения поясняется фигурами 1, 2, 3 и 4.
Фиг. 1 - общий вид электропривода.
Фиг. 2 - сечение А-А фиг. 1.
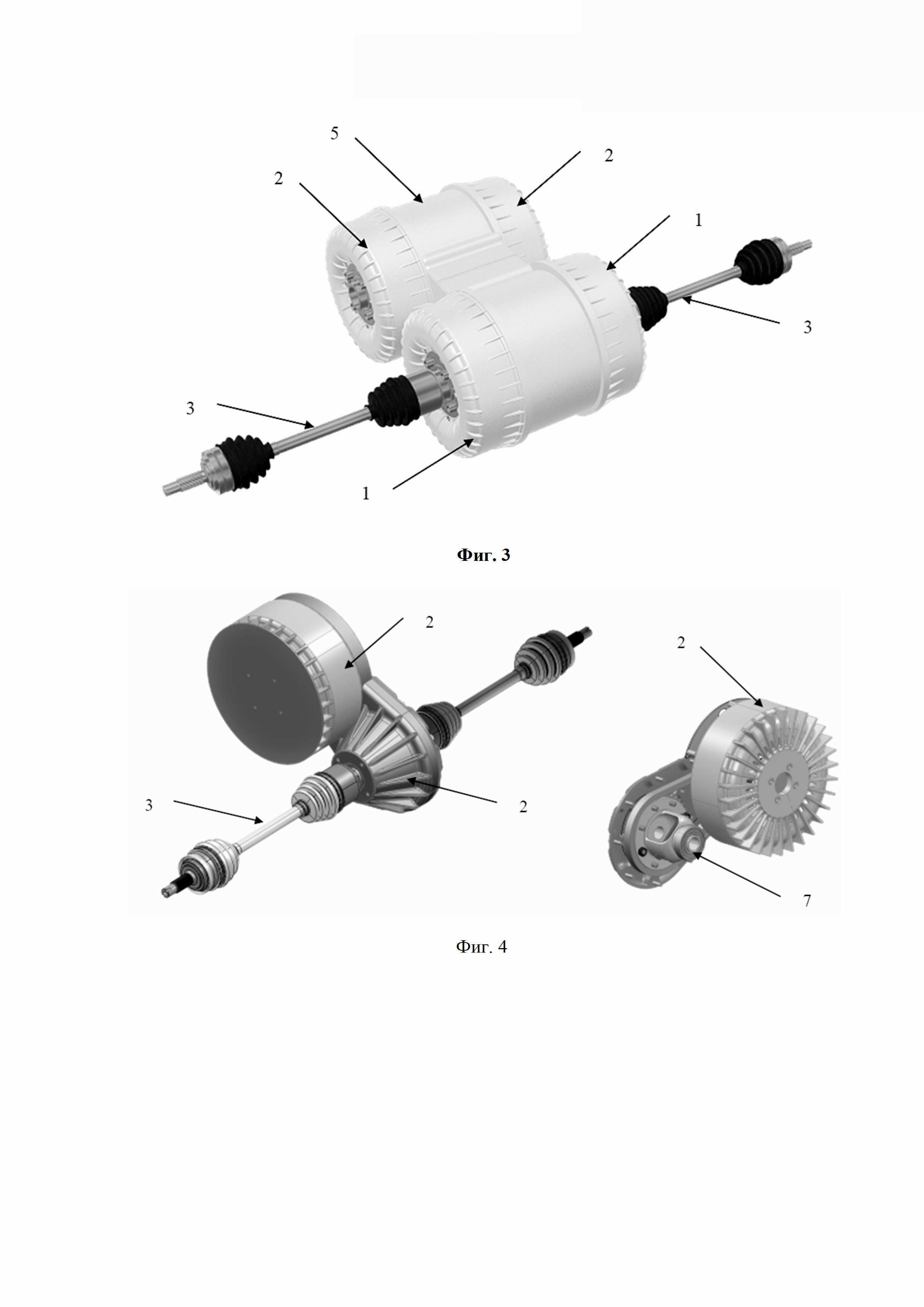
Фиг. 3 - электропривод с независимым приводом на два колеса.
Фиг. 4 - электропривод, имеющий один электродвигатель, передающий крутящий момент через ременную передачу и дифференциал привода колес.
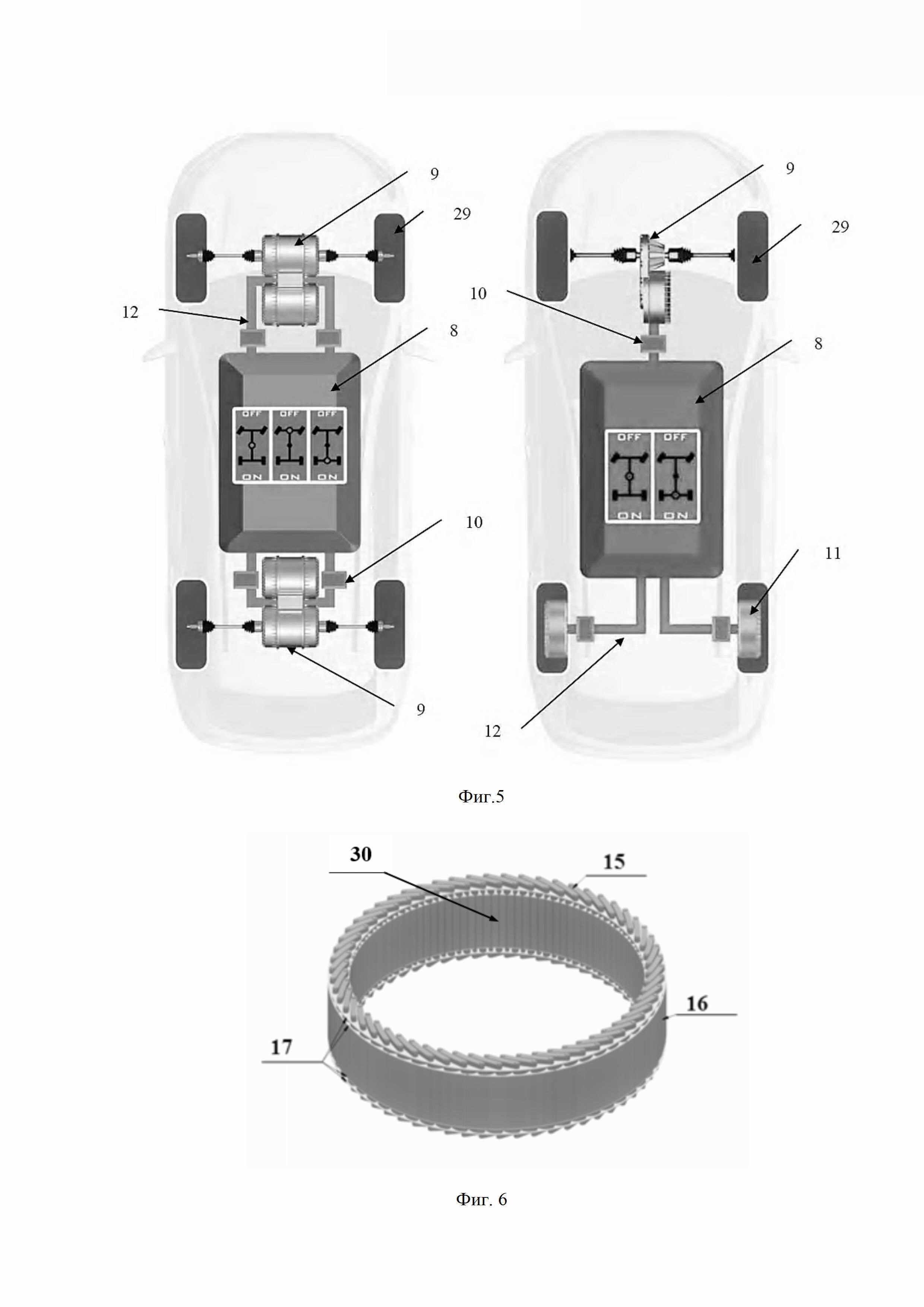
Фиг. 5 - примеры установки альтернативных вариантов в транспортные средства.
Фиг. 6 - схема ротора электродвигателей.
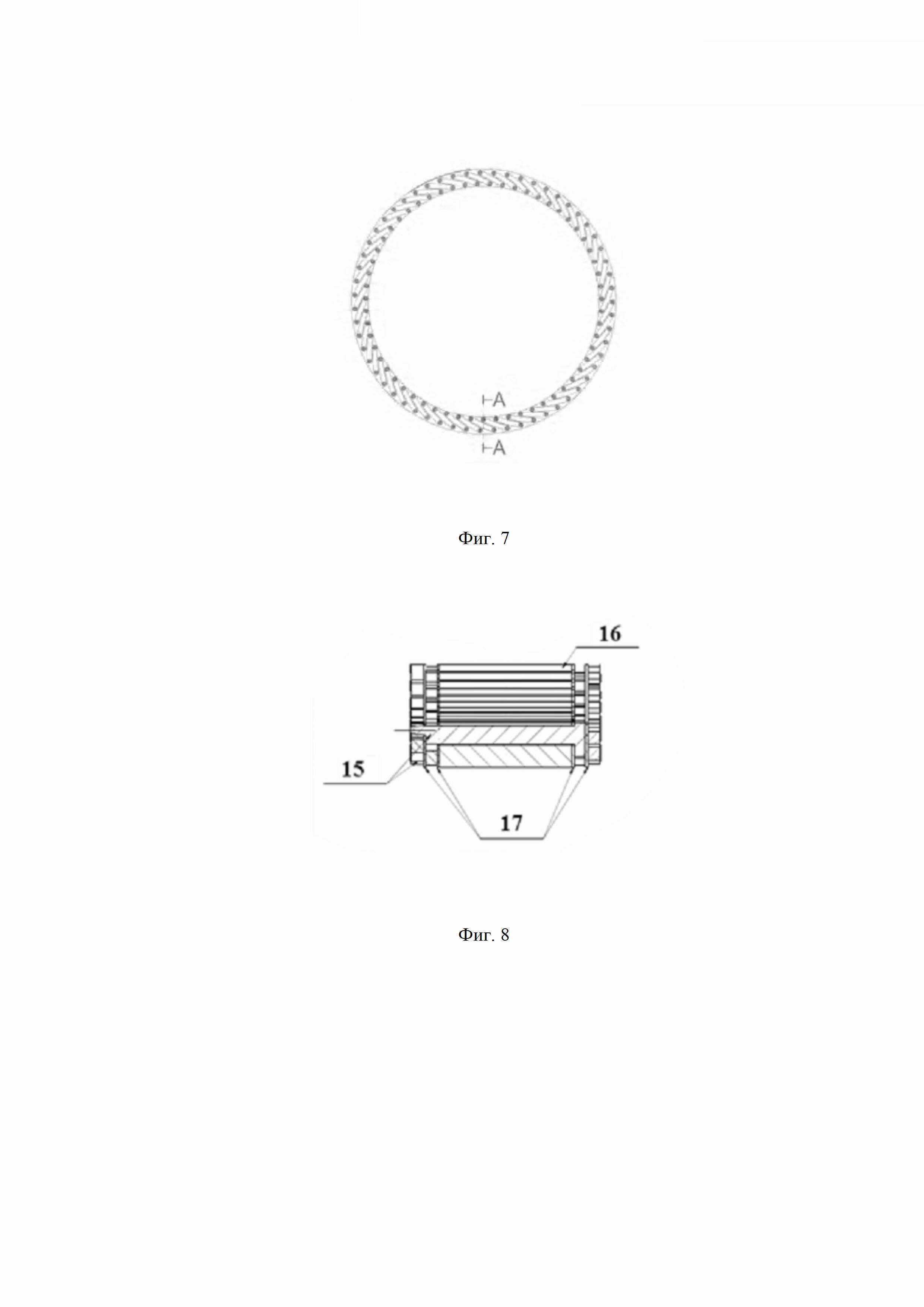
Фиг. 7 - поперечное сечение фиг.6.
Фиг. 8 - сечение А-А фиг.7.
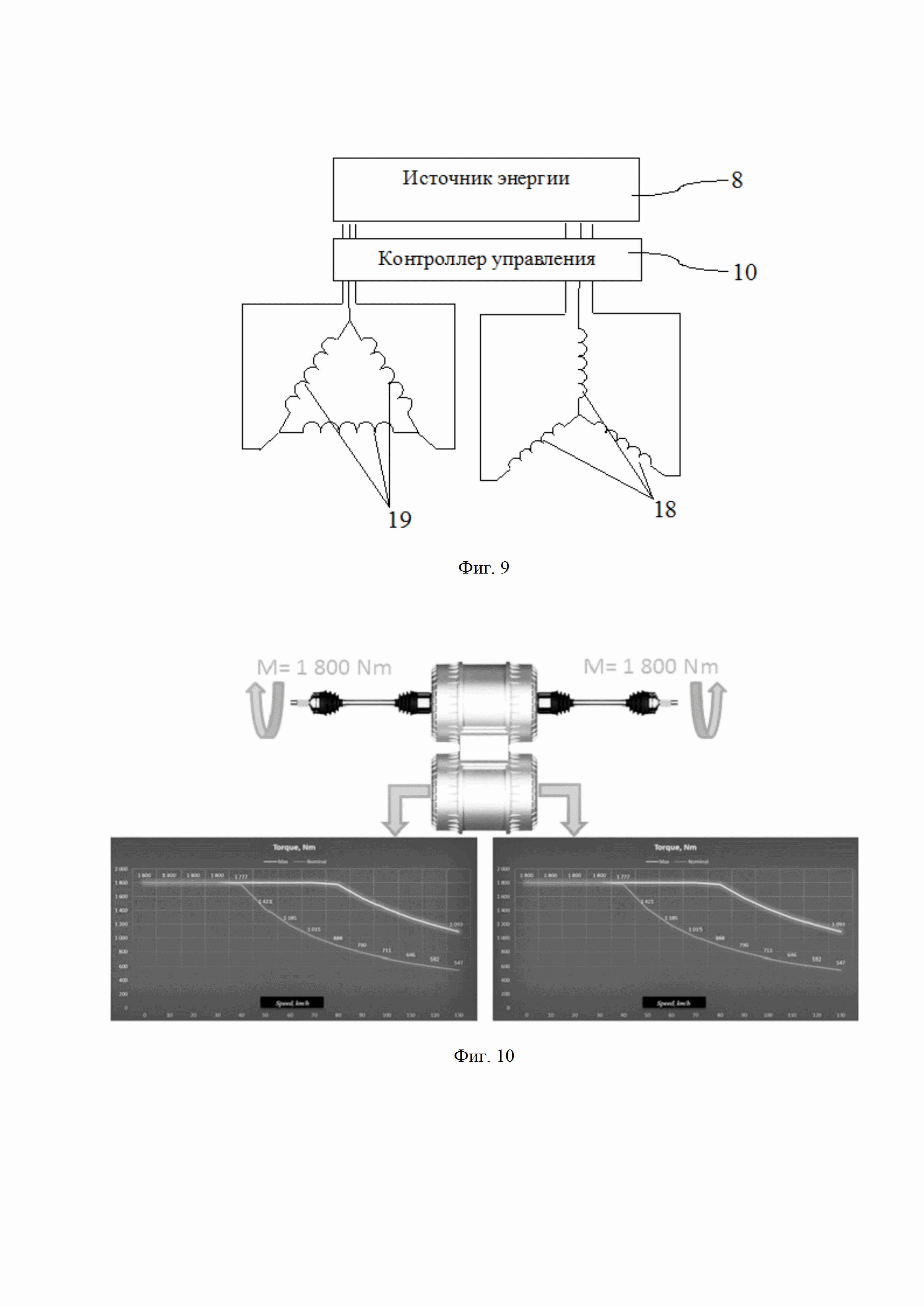
Фиг. 9 - пример управления обмотками статора «звезда-треугольник».
Фиг. 10 - характеристики конкретного исполнения привода, показанного на фиг. 3.
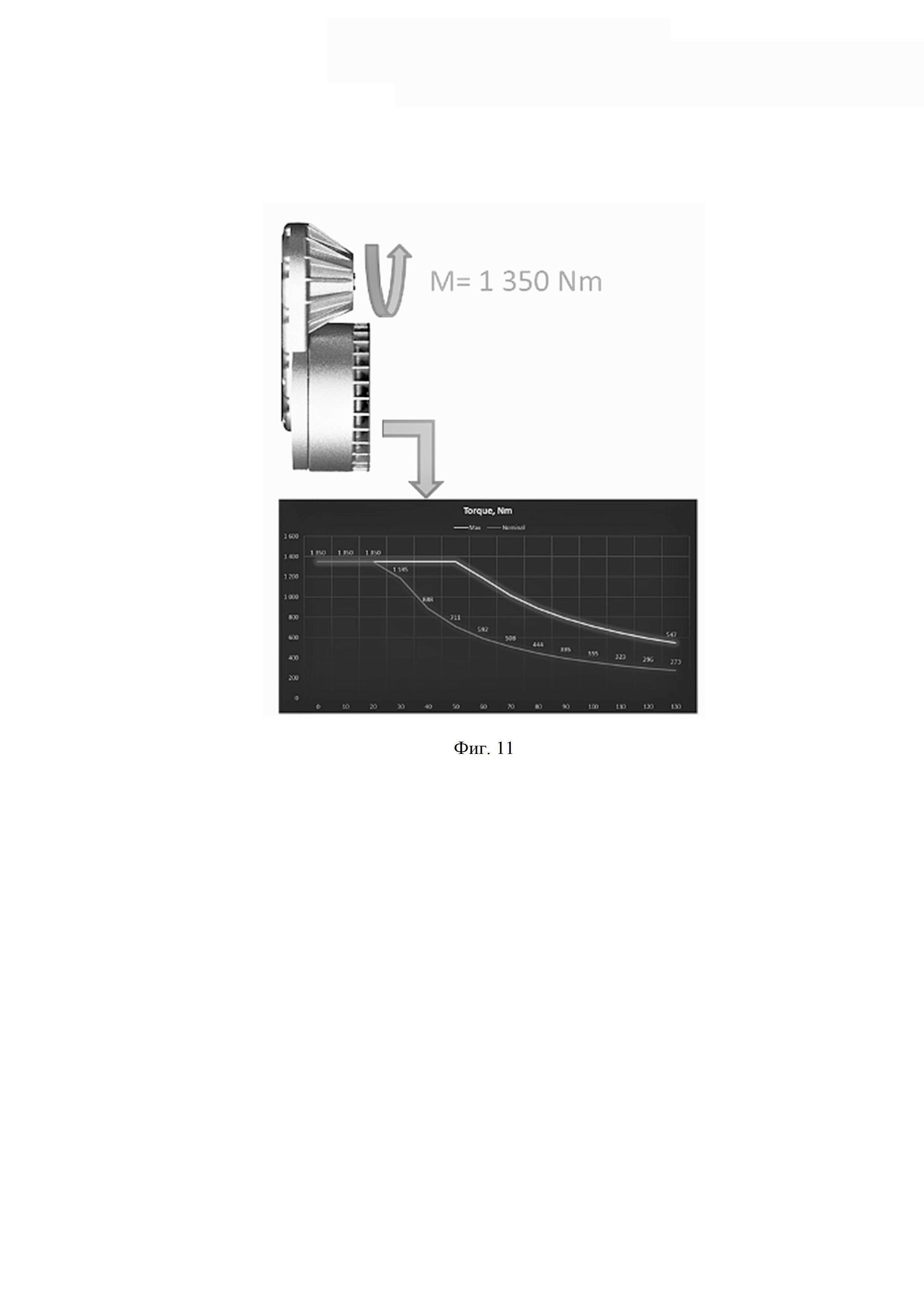
Фиг. 11 - характеристики конкретного исполнения привода, показанного на фиг.4
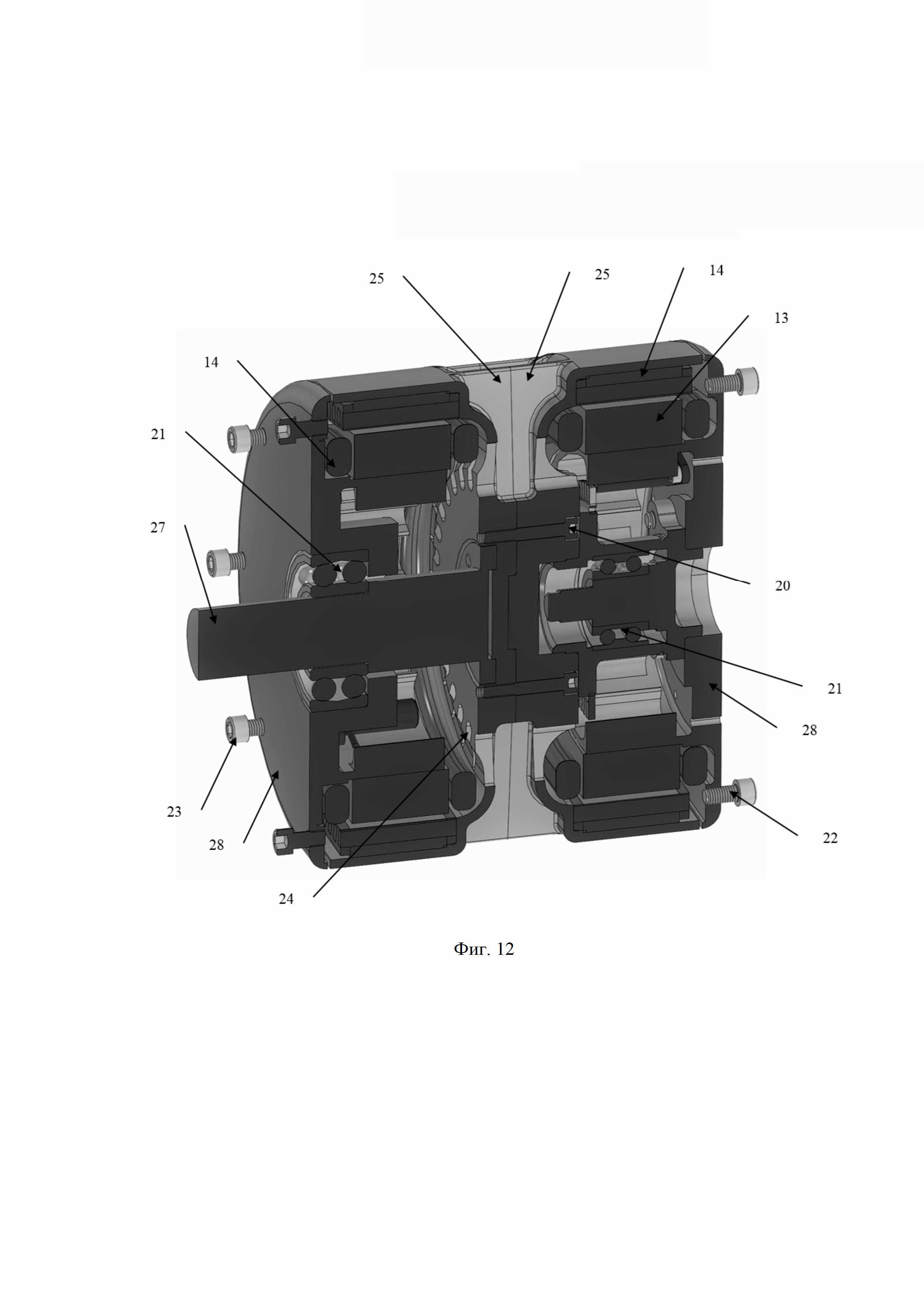
Фиг. 12 - пример модульного соединения электродвигателей привода.
На чертежах элементы обозначены следующими позициями:
1 - дополнительный тяговый асинхронный электродвигатель, имеющий прямой привод на колеса транспортного средства;
2 - тяговый асинхронный электродвигатель, соединённый через ременную передачу с электродвигателем 1;
3 - выходной вал на колеса транспортного средства (полуось);
4 - ременная передача;
5 - корпус привода;
6 - механический тормоз;
7 - дифференциал привода колес;
8 - источник энергии (аккумуляторная батарея);
9 - электропривод;
10 - контроллеры управления;
11 - асинхронный привод по принципу мотор-колеса;
12 - жгуты проводов;
13 - статор электродвигателя;
14 - ротор электродвигателя;
15 - попарно замкнутые медные или алюминиевые проводники ротора;
16 - пакет магнитопровода ротора;
17 - стеклотекстолитовые прокладки:
18 - обмотки, подключенные по схеме «звезда»;
19 - обмотки, подключенные по схеме «треугольник»;
20 - болты соединения роторов в модули;
21 - подшипники выходного вала 3;
22 - болты крепления статора электродвигателя к приводу;
23 - болты крепления статора следующего модуля электродвигателей;
24 - отверстия инерционно-центробежной системы воздушного охлаждения;
25 - корпус ротора 14;
26 - выходной вал тягового асинхронного электродвигателя 2, соединённого через ременную передачу с электродвигателем 1;
27 - выходной вал электродвигателя 1 или 2;
28 - корпус статора;
29 - колесо транспортного средства;
30 - пазы ротора.
На фиг. 3, 4 представлены два альтернативных варианта конкретного исполнения: 1) Электропривод с независимым приводом на два колеса; 2) Электропривод, имеющий только электродвигатель, передающий крутящий момент через ременную передачу и дифференциал привода колес. Тем не менее, возможно применение и других вариантов за счет объединения или упрощения электропривода.
Осуществление изобретения.
Электропривод транспортного средства содержит тяговый асинхронный электродвигатель 2 и по крайней мере один дополнительный тяговый асинхронный электродвигатель 1 с питанием переменным током, заключенные в корпусе 5 привода. Оба тяговых асинхронных электродвигателя 1, 2 выполнены в виде модуля, состоящего из одного или двух электродвигателей. Модули также могут соединятся, увеличивая мощность и крутящий момент пропорционально количеству таких модулей. Тяговый асинхронный электродвигатель 2 снабжен ротором 14, выходной вал 3 которого соединен с редуктором, выполненным в виде ременной передачи 4 и соединенным с колесом 29 (см. фиг. 5). Статор 13 электродвигателя выполнен в виде медной проволоки, намотанной на стальной магнитопровод. Ротор 14 выполнен в виде попарно замкнутых медных или алюминиевых проводников 15 (см. фиг.6-8). Ротор 14 содержит пакет магнитопровода 16, стеклотекстолитовые прокладки 17 и медные проводники 15, попарно замыкающие витки пазов 30 ротора (фиг. 6 - 8).
Короткозамкнутые витки обмотки ротора 14 спроектированы так, что вращающееся электромагнитное поле статора 13 воздействует на попарно замкнутые медные или алюминиевые проводники ротора 15 обмотки ротора 14, проходящие через зоны, прилегающие к границам полюсного деления статора и вращающееся электромагнитное поле статора 13 добавляет дополнительное воздействие на участки проводников 15 обмотки ротора 14, проходящих через зоны, прилегающие к границам половины полюсного деления статора.
Дополнительный тяговый асинхронный электродвигатель 1 выполнен со своим однопакетным ротором 14, вращающимся относительно своего однопакетного статора 13 и имеет прямой привод на колеса 29 транспортного средства через вал 3. Выходной вал 3 ротора 14 дополнительного тягового асинхронного двигателя 1 соединен через ременную передачу 4 с валом 26 ротора тягового асинхронного электродвигателя 2, увеличивающего крутящий момент оси колеса пропорционально передаточному числу ременной передачи 4.
Источником электропитания 8 является литий-ионная батарея.
При нажатии педали акселерации, связанной с реостатом акселерации, сигнал обрабатывается в контроллерах управления 10, который через преобразователи подает сигналы на подачу тока с источника энергии 8 на электропривод 9 (см. фиг. 5).
Электропривод 9 (см. фиг. 5) состоит из электродвигателей 1 имеющих прямой привод на колеса транспортного средства (см. фиг. 1, 2) и электродвигателей 2 (см. фиг. 1, 2), соединённых через ременную передачу с электродвигателями 1.
Система электроприводов 9, объединена в общую систему контроллерами управления 10 и жгутами проводов 12 (см. фиг. 5). Также электроприводы 9 могут объединяться в одну систему с другими видами электродвигателей, такими, например, как асинхронные мотор колеса 11 (см. фиг. 5).
Контроллеры управления 10 отслеживают работу каждого привода и управляют параметрами каждого электродвигателя по программе и алгоритмам, заложенным в конкретное исполнение транспортного средства. При этом, общее отслеживание и управление электродвигателями возложено на один из контроллеров 10, берущего на себя функции мастер-контроллера (см. фиг. 5).
При работе электродвигателей 1, 2 (см. фиг. 1 и 2) подключённых по схеме обмотки “звезда” 18 (фиг. 9) или по схеме обмотки “треугольник” 19 (фиг. 9) электроника контроллера управления 10 (см. фиг. 5) определяет векторное управление электродвигателями 1 и 2 и нагрузочные параметры обмоток.
При работе электродвигателей 1 и 2 (см. фиг. 1 и 2) при задействовании одновременно обмотки подключённой по схеме “звезда” 18 (фиг. 9) и подключённой по схеме “треугольник” 19 (фиг. 9), на этапе разгона электрический момент приходится на все комбинированные обмотки, подключённые по схеме “звезда” и “треугольник”, распределение токов происходит по совмещенному соединению обмоток “звезда” и “треугольник”, при этом, распределение может происходить не симметрично, а управляемо электроникой контроллера управления 10. Это позволяет увеличить возможности перегрузки и коэффициента полезного действия при различных режимах в пределах от 3 до 40%, а также существенно снизить шумность электродвигателя до 40% за счет исключения перетекания паразитирующих токов и симметричному распределению электрических нагрузок. Во время движения нагрузка непрерывно переходит на обмотки, подключённые по схеме “треугольник”, и электродвигатель переходит на режим максимальной мощности.
Подведенная к статору 13 электродвигателя энергия переменного тока создает в нем первичное вращающееся магнитное поле, которое, благодаря магнитному сцеплению с ротором 14, наводит в его проводниках 15 (фиг. 6, 8) электрический ток для создания вторичного магнитного поля. Причем проводники 15 ротора 14, представляют собой пары короткозамкнутых стержней проводников, расположенных по периметру ротора таким образом, что ток от стержней каждой пары проводников, находящихся в области генерирования его максимальных значений и, как следствие, наименьшей интенсивности магнитного поля статора и с минимальным электромеханическим взаимодействием со статором, направляется к стержням соответствующих пар с максимальными значениями магнитного поля статора, создавая тем самым условия для дополнительного воздействия вторичного поля ротора на первичное поле статора как в поперечном, так и в продольном направлении с помощью первой, второй и последующих четных гармоник. Такая схема увеличивает эффективность электромеханического взаимодействия между ротором и статором как для повышения механической мощности, передаваемой на вал, так и для сохранения работоспособности машины при отключении фазы питания статора.
При этом создаваемый крутящий момент электродвигателей 1 (см. фиг. 1 и 2) передается напрямую на колеса транспортного средства через вал 3 ротора (см. фиг. 1 и 2) и частота его вращения совпадает с частотой вращения колес 29. Крутящий момент и частота вращения электродвигателя 2 (см. фиг. 1 и 2), связанного с электродвигателем 1 через ременную передачу 4 (см. фиг. 1), увеличивается пропорционально передаточному числу ременной передачи, для сохранения равности скоростей вращения на валу 3 - равная скорость должна быть на валу ротора или на оси колеса?? - на оси 3 (см. фиг. 1, 2). При этом общий крутящий момент электропривода суммируется от крутящего момента электродвигателя 1 прямого привода и крутящего момента, создаваемого электродвигателем 2 через ременную передачу.
Коэффициент потерь на ременной передачи составляет 1% и не оказывает существенного влияния на энергоэффективность по сравнению, например, с планетарными или гипоидным редукторами.
Так как, скорость вращения электродвигателя 2 (см. фиг. 1 и 2) выше скорости вращения электродвигателя 1, то он пропорционально быстрее выходит на максимальную мощность и для дальнейшего увеличения скорости вращения при сохранении мощностных параметров его крутящий момент начинает падать.
Однако, так как электродвигатели 1 и 2 (см. фиг. 1 и 2) объединены в один привод через ременную передачу, то электродвигатель 1, имеющий меньшую частоту вращения и не вышедший на полную мощность, компенсирует недостаток мощности электродвигателя 2 для сохранения крутящего момента.
Таким образом, поддерживается максимальный крутящий момент в большем скоростном диапазоне движения транспортного средства.
На фиг. 3 - 5 приведены примеры конкретного исполнения электропривода с независимым приводом на два колеса и упрощенного исполнения электропривода, имеющего только электродвигатель 2, передающий крутящий момент через ременную передачу и дифференциал 7 привода колес.
Из параметров, приведенных на фиг.10 - 11 видно, что высокий крутящий момент электропривода с независимым приводом на два колеса остается в большем скоростном диапазоне работ.
Частным случаем, может являться интегрирование дифференциала 7 привода колес (см. фиг. 4) в привод для механического распределения крутящего момента между колесами транспортного средства.
Также частным случаем является исключение электродвигателей прямого привода, и передача крутящего момента всего электропривода только через ременную передачу 4 электродвигателем 2 (см. фиг. 2).
При нажатии на педаль тормоза происходит обработка информации о нажатии мастер-контроллером одного из контролеров управления 10 (см. фиг. 3). На основании данных о частоте вращения колеса и степени нажатия педали тормоза контроллер управления 10 вычисляет момент торможения, который необходимо создать в сложившейся ситуации для обеспечения заданного водителем торможения. Если полученный момент торможения менее заданной в программе управления величины, контроллер управления 10 даёт команду на изменение коммутации электродвигателей на режим генератора без задействования механического тормоза 6 (см. фиг. 1.). Если полученный момент торможения больше заданной в алгоритме управления контроллера управления 10 величины, происходит дополнительно механическое срабатывание главного тормозного цилиндра, приводящего в действие исполнительный тормозной цилиндр. Результатом этого становится то, что торможение осуществляется и механическим тормозом 6 и генератором (электродвигателями в режиме рекуперации 1 и 2).
При отсутствии воздействий на педаль акселератора и педаль тормоза, контроллер управления 10 не подаёт сигнал коммутирования электродвигателей 1 и 2 (см. фиг. 1 и 2) электроприводов 9 (см. фиг. 3) с источника энергии 8 (см. фиг. 3) и не создает магнитного поля. Статор и ротор не имеют физического контакта (через щетки, магниты и др.) и взаимодействуют только через магнитное поле и при его отсутствии достигается большой инерционный пробег транспортного средства из-за отсутствия электромагнитных и физических ограничений электродвигателей по его «выбегу».
Результаты испытаний показали достижение высокого крутящего момента в широком диапазоне скоростей транспортного средства при оптимизация мощностных параметров привода, т.е. достижение заявляемого технического результата.
При необходимости увеличения крутящего момента и мощности привода электродвигатели имеют возможность модульного соединения стандартных по характеристикам моторов в приводе.
Для этого роторы 14 электродвигателей соединяются вместе через корпусы роторов 25 болтами 20 (фиг. 12). Выходной вал 27 соединен с роторами 14 на корпусах 25 и вращается на подшипниках 21.
Статоры 13 электродвигателя - неподвижны и крепятся к корпусу 5 электропривода болтами 22. Следующий модуль может крепиться к текущему болтами 23. Таким образом, электродвигатели 1 или 2 со внешним ротором 14 соединены их вращающимися поверхностями друг к другу и вращаются совместно с валом 27 на подшипниках 21 внутри по отношению к корпусам статоров 28.
Отверстия 24 в корпусе ротора 25 при вращении роторов 14 относительно статоров 13 формируют инерционно-центробежную систему воздушного охлаждения.
Увеличение модулей возможно, как для дополнительных тяговых асинхронных электродвигателей 1, имеющих прямой привод на колеса транспортного средства, так и тяговых асинхронных электродвигателей 2, соединённых через ременную передачу с электродвигателем 1.
Выходной вал 27 в этом случае может являться либо выходным валом на колеса транспортного средства 3 электродвигателя 1 либо выходным валом 26 тягового асинхронного электродвигателя 2, соединённого через ременную передачу с электродвигателем 1.
Асинхронный электропривод с интеграцией на редуктор и дифференциал
Генератор маховичный
Модульный электромобиль
Асинхронное мотор-колесо с повышенным магнитным сцеплением
Система управления полноприводным электромобилем
Электродвигатель
Асинхронный электропривод с интеграцией на редуктор и дифференциал
Генератор маховичный
Модульный электромобиль
Асинхронное мотор-колесо с повышенным магнитным сцеплением
Система управления полноприводным электромобилем
Электродвигатель

