Результат интеллектуальной деятельности: ФОРМИРОВАНИЕ И ИСПОЛЬЗОВАНИЕ КАРТ ВЫСОКОГО РАЗРЕШЕНИЯ
Вид РИД
Изобретение
Настоящее изобретение имеет отношение к области техники беспроводной связи, а точнее, к устройству для формирования карт высокого разрешения (HD) и способам для формирования карт HD, беспроводным сетям связи и транспортным средствам, использующим карты HD. Изобретение дополнительно имеет отношение к сетям доставки карт HD для автономного вождения.
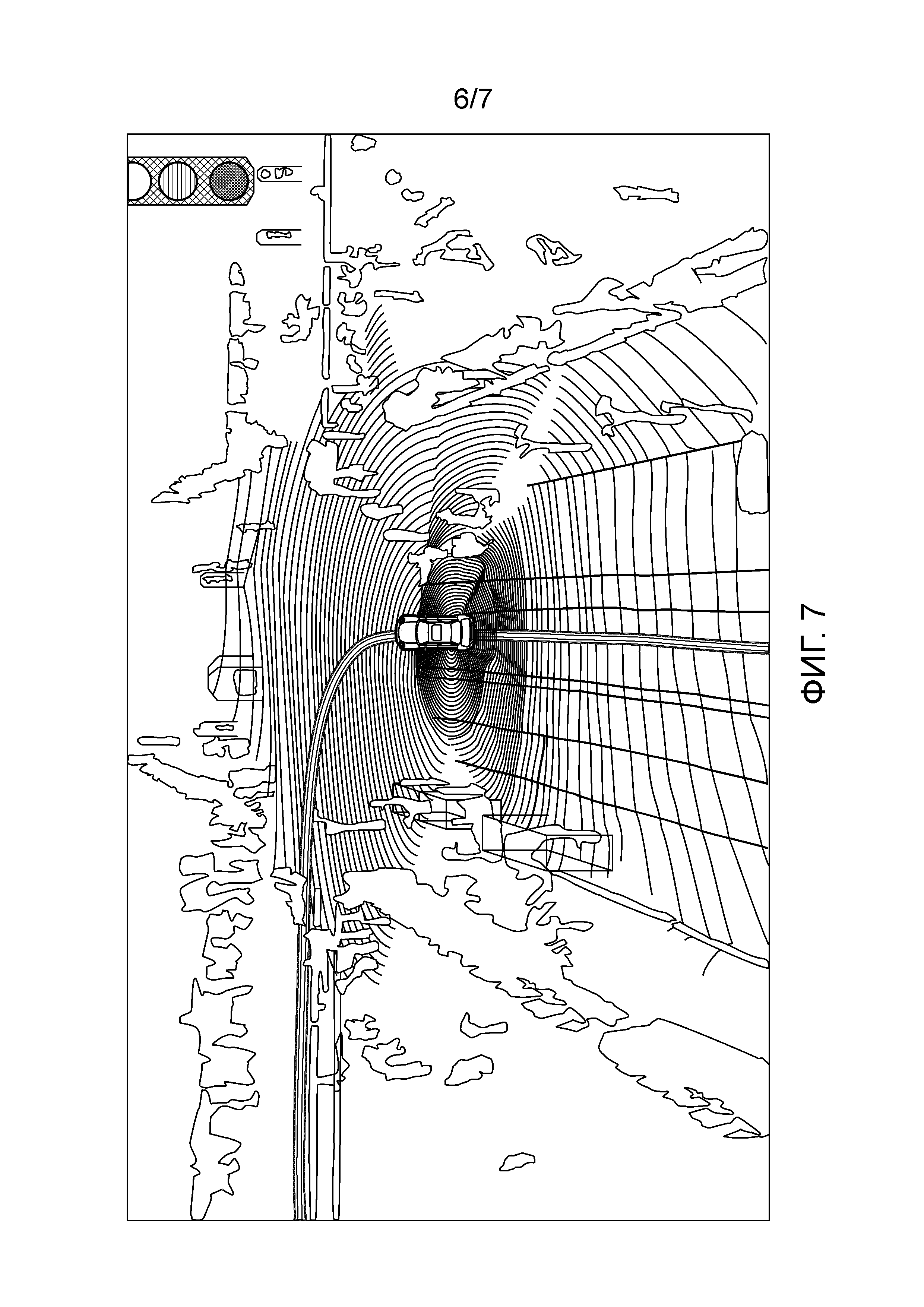
Автономное вождение рассматривается в качестве одного из трех наиболее широких применений в системах 5G (пятого поколения), как сообщается в [1]. Для автономного вождения, разрешения текущих карт для автомобильных навигационных систем не достаточно, и необходимы карты более высокого разрешения и реального времени, как сообщается в [2]. Эта разновидность новой карты называется картой HD (высокого разрешения) или динамической картой. Фиг. 7 показывает пример карты HD собранной лазерным локатором (LiDAR, лазерным устройством обнаружения и измерения дальности), который представляет собой основанную на лазере обработку, которая считывает объекты в среде поля ближней зоны автомобиля. Фиг. 7 показывает изображение облака точек, собранное лазерным локатором для карты HD. Технические решения, описанные в материалах настоящей заявки, относятся к CIU и к RSU, и к сетям, состоящим из CIU и/или RSU, чтобы давать возможность автономного вождения посредством доставки карт HD широкого охвата в реальном времени. CIU для автономного вождения может содержать блок датчиков HD, например, лазерный локатор, чтобы собирать информацию для карты HD, блок Rx (приемника) миллиметрового диапазона, чтобы принимать карты HD в реальном времени, например, с пропускной способностью более чем 2,2 Гбит/с и с задержкой менее 10 мс с окружающих автомобилей, то есть, из других CIU и/или RSU. CIU может содержать блок обработки карты HD для расчета карты HD, поддерживающей по меньшей мере 300 метров впереди, комбинируя многочисленные карты HD, принятые посредством RSU. Эти CIU могут содержать блок Tx (передатчика) миллиметрового диапазона для пересылки карты HD, рассчитанной в трансляторе CIU в реальном времени, например, с пропускной способностью более 2,2 Гбит/с и с задержкой менее 10 миллисекунд, на окружающие автомобили или RSU. CIU может содержать блок автономного вождения для формирования команд вождения автомобиля для акселератора, тормозов, рулевого механизма, и т. д., на основании карты HD, рассчитанной в трансляторе CIU. В [2], сообщается, что общий объем данных карты HD в течение одночасового вождения становится приблизительно 1 Тбайтом, что соответствует скорости передачи данных 2,2 Гбит/с. В [2], также отмечено, что задержка должна быть меньше 10 мс для приема кадра карты HD.
Самый последний выпуск 14 V2V 3GPP пробует поддерживать связь V2V (между транспортными средствами) для поддержки служб безопасности дорожного движения [3]. Были разработаны стандарт V2V 3GPP и связанные стандарты, такие как IEEE802.11p, ETSI CAM и US SAE, чтобы обмениваться информацией для вождения, такой как чрезвычайные ситуации, предупреждения, местоположение, скорость, и т. д., между транспортными средствами для содействия безопасному вождению. Однако, вследствие ограниченной скорости передачи данных в линии связи V2V, объем данных, которыми можно обмениваться, слишком мал для автономного вождения, которое требует огромного объема данных для карты HD. Более того, встраивание V2V во все транспортные средства проблематично вследствие более длительных сроков службы изделий у транспортных средств.
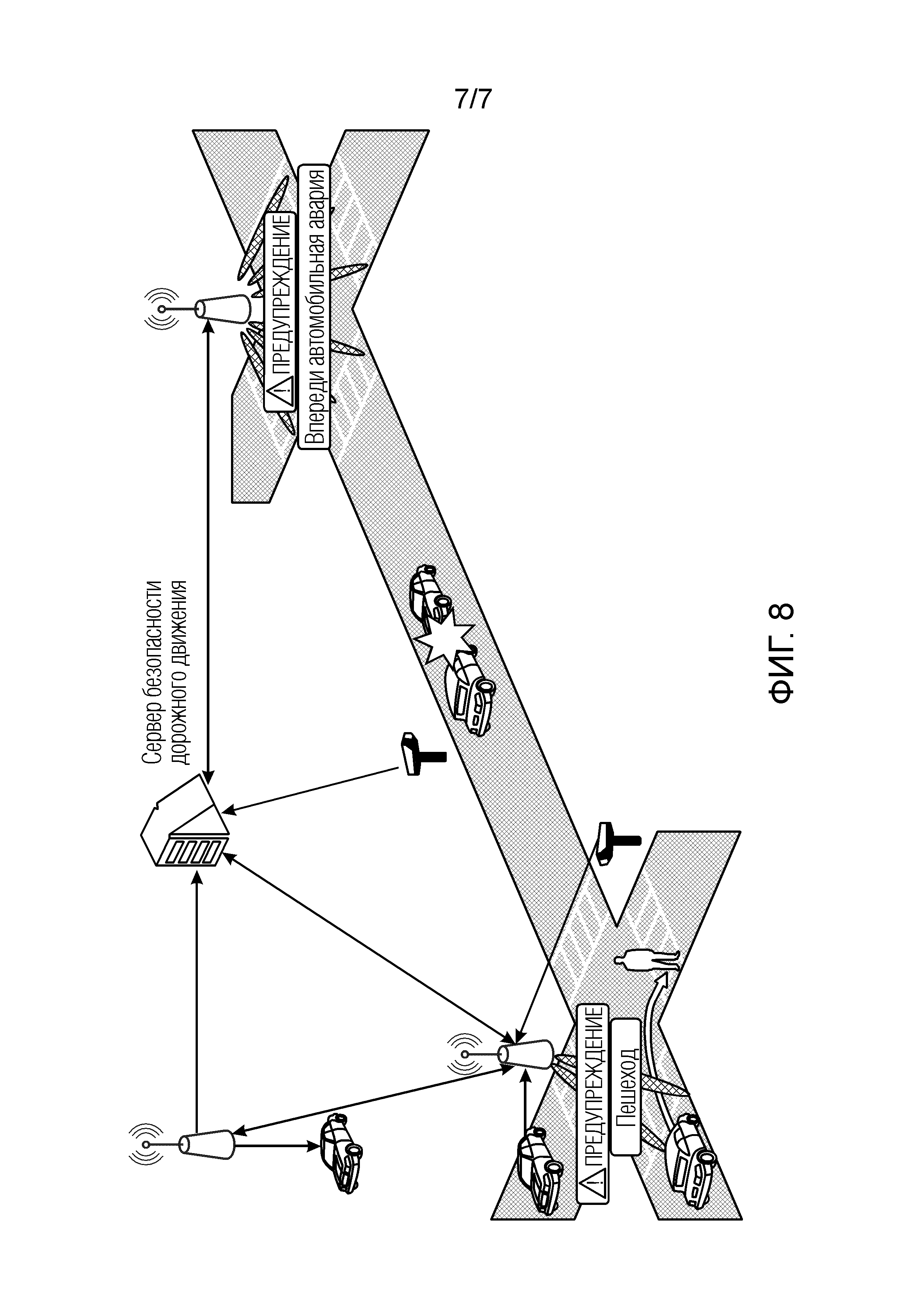
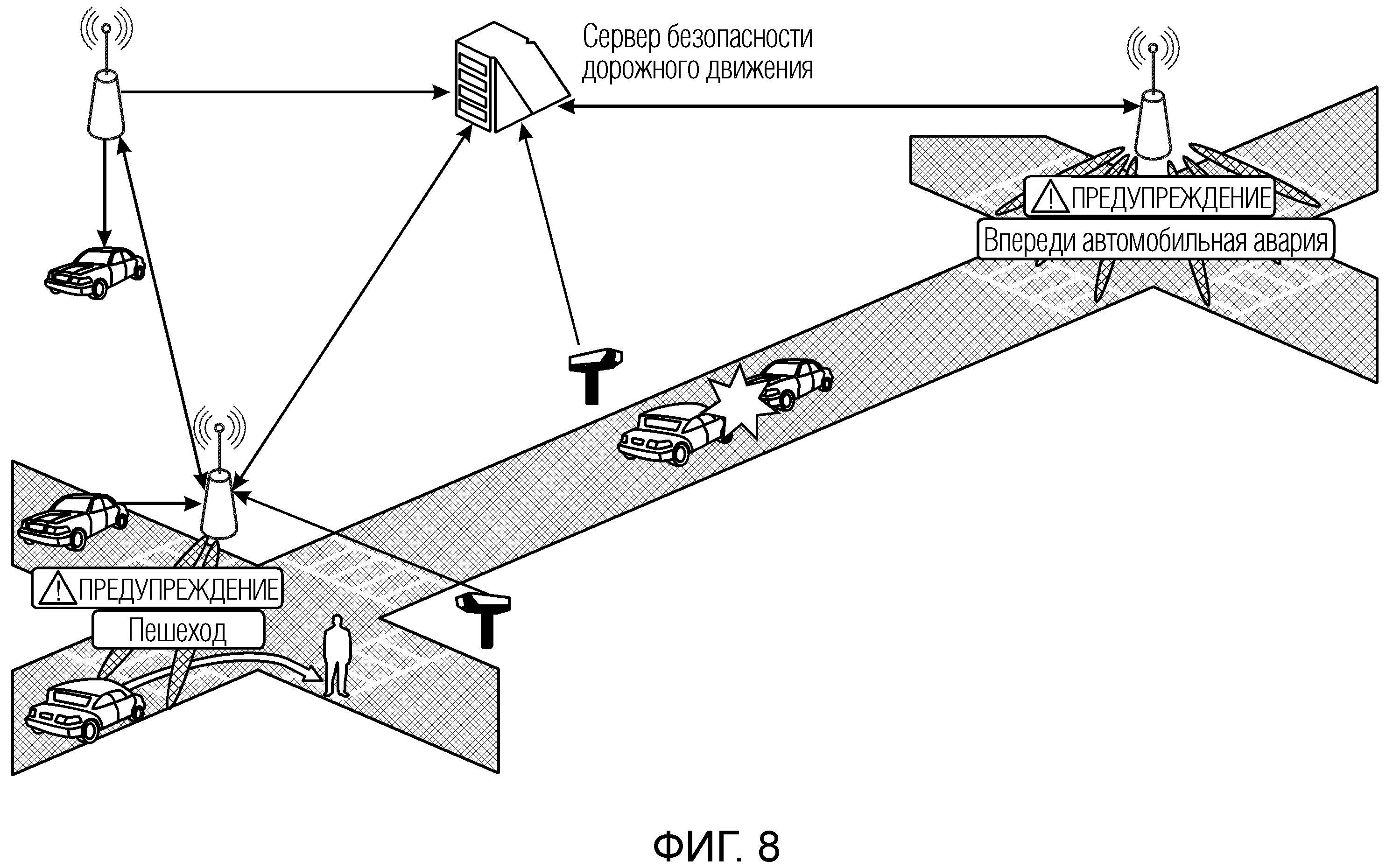
Самый последний выпуск 14 3GPP пробует поддерживать связь V2X (между транспортным средством и всем остальным) для поддержки служб безопасности дорожного движения с помощью инфраструктуры [3]. V2X 3GPP является расширением современной VICS (системы информирования и связи с транспортными средствами) и DSRC (специализированной связи ближнего действия) для обмена информацией о дорожных пробках, дорожно-транспортных происшествиях, дорожном строительстве, и т. д., между дорогой и транспортными средствами через инфраструктуру. Фиг. 8 показывает пример V2X для предупреждения о дорожно-транспортных происшествиях и пешеходах, переходящих дороги, где RSU (придорожные блоки) выявляют события на дороге. На фиг. 8, роль сервера безопасности дорожного движения должна обновлять дорожную карту информацией о дорожных событиях, выявленных посредством RSU, и доставлять карту на автомобили, расположенные в той же самой зоне или городе. Поскольку сервер безопасности дорожного движения расположен глубоко внутри сети, задержка доставки дорожной карты гораздо больше 10 мс.
Было предложено скомбинировать автомобильный радиолокатор миллиметрового диапазона и связь в миллиметровом диапазоне для повышения скорости передачи данных между транспортными средствами, пользуясь технологией миллиметрового диапазона, без повышения себестоимости аппаратных средств (4). В [5], было внесено предложение о совместном считывании и совместном маневрировании посредством обмена информацией с датчиков (например, информацией с лазерного локатора) в пределах группы автомобилей (колонны автотранспорта) или даже из RSU для решения проблемы действующих вслепую объектов.
Таким образом, есть необходимость в улучшении автономного вождения.
Цель состоит в том, чтобы предусмотреть концепцию, которая предоставляет возможность безопасного и надежного автономного вождения.
Изобретатели обнаружили, что, посредством комбинирования принятых карт HD с собственными данными с датчиков, может быть получена команда управления для транспортного средства, несущего соответственное устройство, которая надежна, так как она содержит информацию в пределах области, сканированной собственными датчиками, и содержит информацию в областях, которые вероятно невидимы собственными датчиками, но видны по принятой карте. Поэтому, сценарий, требующий командного сигнала, надежен для областей, видимых или невидимых самим устройством. Посредством передачи адаптированной карты или сформированной карты, идентичная надежность может обеспечиваться для других устройств.
Согласно варианту осуществления, устройство содержит процессорные блоки, выполненные с возможностью выдавать первую карту высокого разрешения, блок датчиков, выполненный с возможностью для выдачи данных с датчиков, представляющих собой окружающие условия на периферии устройства, и блок приемника, выполненный с возможностью принимать данные, представляющие собой вторую карту высокого разрешения. Процессорный блок выполнен с возможностью объединять вторую карту высокого разрешения и данные с датчиков, с тем чтобы выдавать первую карту высокого разрешения. Устройство содержит блок передатчика, выполненный с возможностью для передачи результата объединения второй карты высокого разрешения и данных с датчиков. Устройство дополнительно содержит блок генератора команд, выполненный с возможностью формировать командный сигнал, представляющий собой команду управления транспортным средством для транспортного средства, несущего устройство, на основании первой карты высокого разрешения.
Устройство может предоставлять возможность для безопасного и надежного автономного вождения посредством объединения внешних карт с собственными данными с датчиков, формируя команды вождения на основании такой обновленной карты HD и перераспределяя обновленные карты.
Согласно варианту осуществления, сеть связи содержит множество устройств, при этом, множество устройств выполнено с возможностью обмениваться картами высокого разрешения, сформированными множеством устройств. По меньшей мере одно устройство из множества устройств выполнено с возможностью объединять карты высокого разрешения, принятые с других устройств сети связи, с тем чтобы формировать сводную карту высокого разрешения. Это может предусматривать карту высокого разрешения, покрывающую большую зону или область, то есть, сводная карта высокого разрешения может содержать широкий диапазон охвата и дополнительно может содержать низкие проблемы галопирования, так как карта может формироваться на основании разных точек обзора.
Согласно варианту осуществления, придорожный блок (RSU) содержит процессорный блок, выполненный с возможностью выдавать первую карту высокого разрешения. RSU дополнительно содержит блок датчиков, выполненный с возможностью для выдачи данных с датчиков, представляющих собой окружающие условия на периферии RSU, и блок приемника, выполненный с возможностью принимать данные, представляющие собой вторую карту высокого разрешения. Процессорный блок выполнен с возможностью объединять вторую карту высокого разрешения и данные с датчиков, с тем чтобы выдавать первую карту высокого разрешения. RSU дополнительно содержит блок передатчика, выполненный с возможностью для передачи результата объединения второй карты высокого разрешения и данных с датчиков. Первая карта высокого разрешения содержит картографическую информацию в пределах радиуса по меньшей мере 300 метров вокруг RSU. Это может предусматривать придорожный блок, который может выдавать более точную информацию карты в радиусе вокруг RSU, с тем чтобы давать возможность отправителям, таким как транспортные средства, данных точно планировать и отслеживать маршрут движения.
Согласно варианту осуществления, сеть содержит множество RSU, при этом, RSU расположены на расстоянии друг от друга, с тем чтобы охватывать проезжую часть транспортной системы. Это может предусматривать предоставление информации для автономного вождения в местных распределенных точках, так чтобы информация имелась в распоряжении вдоль проезжей части транспортной системы.
Согласно варианту осуществления, сеть связи содержит множество RSU, при этом, множество RSU выполнено с возможностью обмениваться картами высокого разрешения, сформированными множеством RSU. По меньшей мере один RSU из множества RSU выполнен с возможностью объединять карты высокого разрешения, принятые с других RSU сети связи, с тем чтобы формировать сводную карту высокого разрешения. Это может давать преимущества сводной карты высокого разрешения, формируемой придорожными блоками.
Согласно варианту осуществления, сеть связи содержит множество вышеупомянутых устройств и множество RSU. Множество устройств и множество RSU выполнены с возможностью обмениваться картами высокого разрешения, сформированными множеством устройств и множеством RSU. По меньшей мере одно устройство или по меньшей мере один RSU сети связи выполнены с возможностью объединять принятые карты высокого разрешения, с тем чтобы формировать сводную карту высокого разрешения. Таким образом, сводная карта высокого разрешения может формироваться совместно устройствами и RSU.
Согласно варианту осуществления, транспортное средство содержит вышеупомянутое устройство. Транспортное средство выполнено с возможностью автономно перемещаться в ответ на командный сигнал, представляющий собой команду управления транспортным средством.
Дополнительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Варианты осуществления настоящего изобретения далее описаны подробнее со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 показывает принципиальную структурную схему автомобильного внутреннего блока (CIU) согласно варианту осуществления;
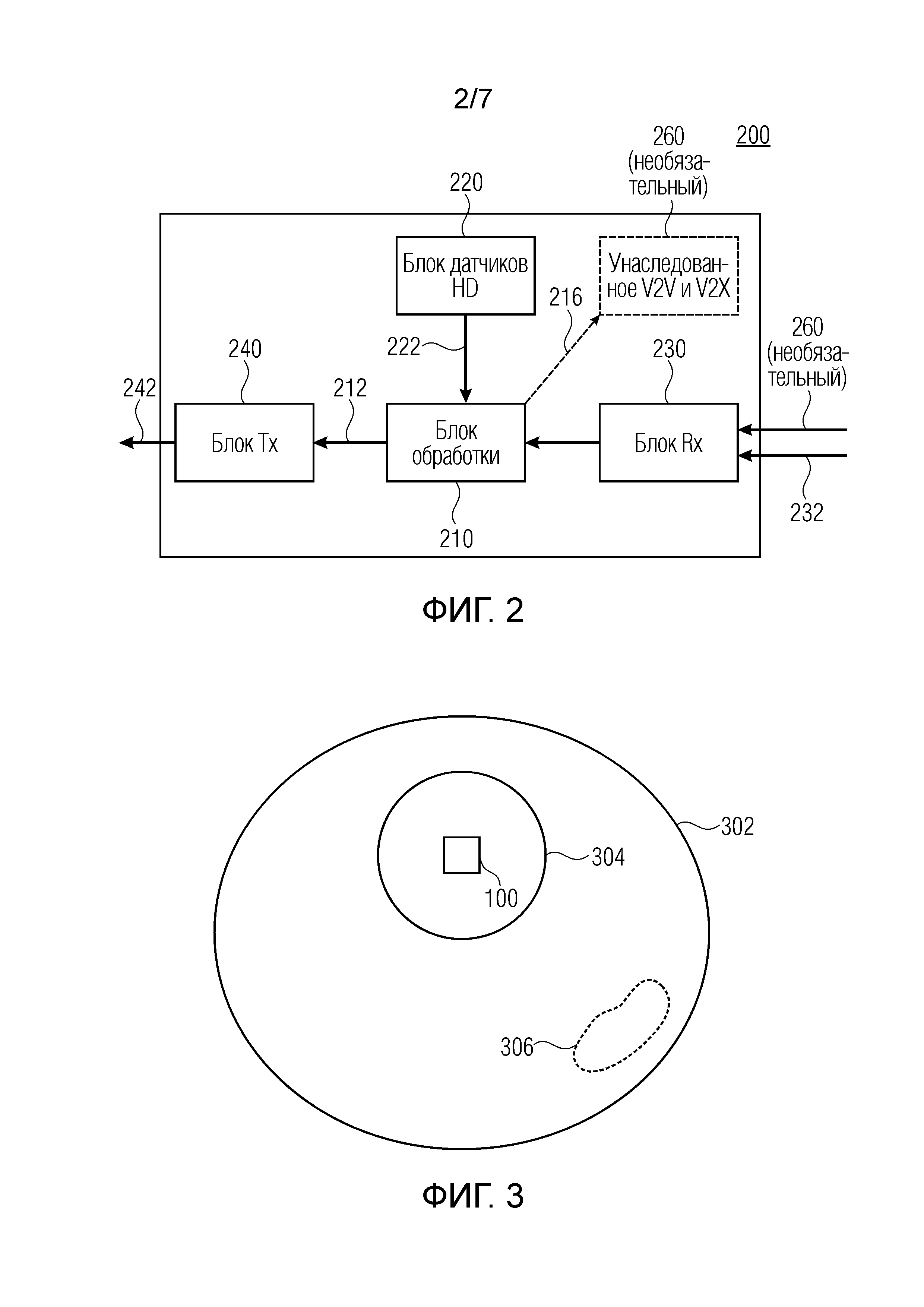
фиг. 2 показывает принципиальную структурную схему придорожного блока (CIU) согласно варианту осуществления;
фиг. 3 показывает принципиальную структурную схему карты HD согласно варианту осуществления;
Фиг. 4a показывает принципиальную структурную схему сети связи согласно варианту осуществления;
Фиг. 4b показывает принципиальную структурную схему карты высокого разрешения согласно варианту осуществления;
фиг. 5 показывает принципиальную структурную схему сети, содержащей множество RSU, согласно варианту осуществления;
фиг. 6 показывает принципиальную структурную схему сети, содержащей множество CIU, согласно варианту осуществления;
фиг. 7 показывает пример карты HD, собранной лазерным локатором; и
фиг. 8 показывает пример V2X для предупреждения о дорожно-транспортных происшествиях и пешеходах, переходящих дороги, где RSU (придорожные блоки) выявляют события на дороге согласно предшествующему уровню техники.
Одинаковые или равнозначные элементы или элементы с равнозначными или эквивалентными функциональными возможностями обозначены в нижеследующем описании одинаковыми или равнозначными номерами ссылок, даже если появляются на разных фигурах.
В нижеследующем описании, множество деталей изложены, чтобы обеспечить более полное понимание вариантов осуществления настоящего изобретения. Однако, специалистам в данной области техники будет очевидно, что варианты осуществления настоящего изобретения могут быть осуществлены на практике без этих конкретных деталей. В других случаях, широко известные конструкции и устройства показаны скорее в виде структурной схемы, чем детально, для того чтобы избежать затенения вариантов осуществления настоящего изобретения. В дополнение, признаки разных вариантов осуществления, описанных в дальнейшем, могут комбинироваться друг с другом, если специально не оговорено иное.
Варианты осуществления, описанные в материалах настоящей заявки, могут относиться к картам высокого разрешения (картам HD). Такие карты могут содержать данные, собираемые с многочисленных форм агрегации датчиков. Таковые могут включать в себя, но не в качестве ограничения, географические данные, такие как информация о привязке к начальной вершине древовидной структуры в комбинации с данными, относящимися к объектам, присутствующим на начальной вершине древовидной структуры, и/или дополнительными данными, такими как ограничения скорости движения, или тому подобное. Агрегированная информация может быть снабжена высоким разрешением, то есть, иметь разрешение несколько метров, несколько дециметров или даже несколько сантиметров. Карты HD могут предоставлять информацию или могут быть картами, уже используемыми в виде декаметровых схем, то есть, можно получать то, вдоль какого направления проезжая часть загромождена и на каком расстоянии. Информация, содержащаяся на картах HD, может содержать автомобили, пешеходов, другие пересекающиеся объекты, светофоры, и всевозможную другую информацию, уместную для дорожного движения.
Некоторые варианты осуществления, описанные в материалах настоящей заявки, относятся к транспортным средствам. Хотя транспортные средства могут быть описаны в связи с дорожными транспортными средствами, пояснения, приведенные в материалах настоящей заявки, также применяются к авиационным транспортным средствам. Подобно дорожным транспортным средствам, авиационные транспортные средства должны избегать столкновений с другими объектами, должны соблюдать определенные правила при движении и обычно передвигаются из отправного пункта к месту назначения, но с использованием одного дополнительного измерения в пространстве.
Некоторые варианты осуществления, описанные в материалах настоящей заявки, относятся к придорожным блокам (RSU), при этом, другие варианты осуществления, описанные в материалах настоящей заявки, могут относиться к автомобильным внутренним блокам (CIU). Такие термины используются для проведения различия меду устройствами, которые являются устанавливаемыми на транспортные средства, и устройствами, которые выполнены для в большей степени зафиксированного положения, такого как вдоль проезжих частей. Несмотря на использование термина «автомобиль», это не будет ограничивать варианты осуществления, описанные в материалах настоящей заявки. CIU также могут быть устанавливаемыми на авиационные транспортные средства, такие как самодвижущиеся аппараты, так же, как и транспортные средства, описанные в материалах настоящей заявки, не ограничены дорожными транспортными средствами. В дополнение, RSU не ограничены устанавливаемыми вдоль дорог, особенно при предоставлении данных или карт HD для авиационных транспортных средств. RSU также могут быть устанавливаемыми в другие места или на объекты, такие как крыша здания, гора, дерево, фонарный столб, кроме того могут быть устанавливаемыми на относительно статичное воздушное транспортное средство, такое как аэростат, или любое другое транспортное средство. Говоря простыми словами, CIU может быть устройством для использования карт HD применительно к управлению транспортным средством, при этом, RSU может быть частью инфраструктуры, поддерживающей CIU.
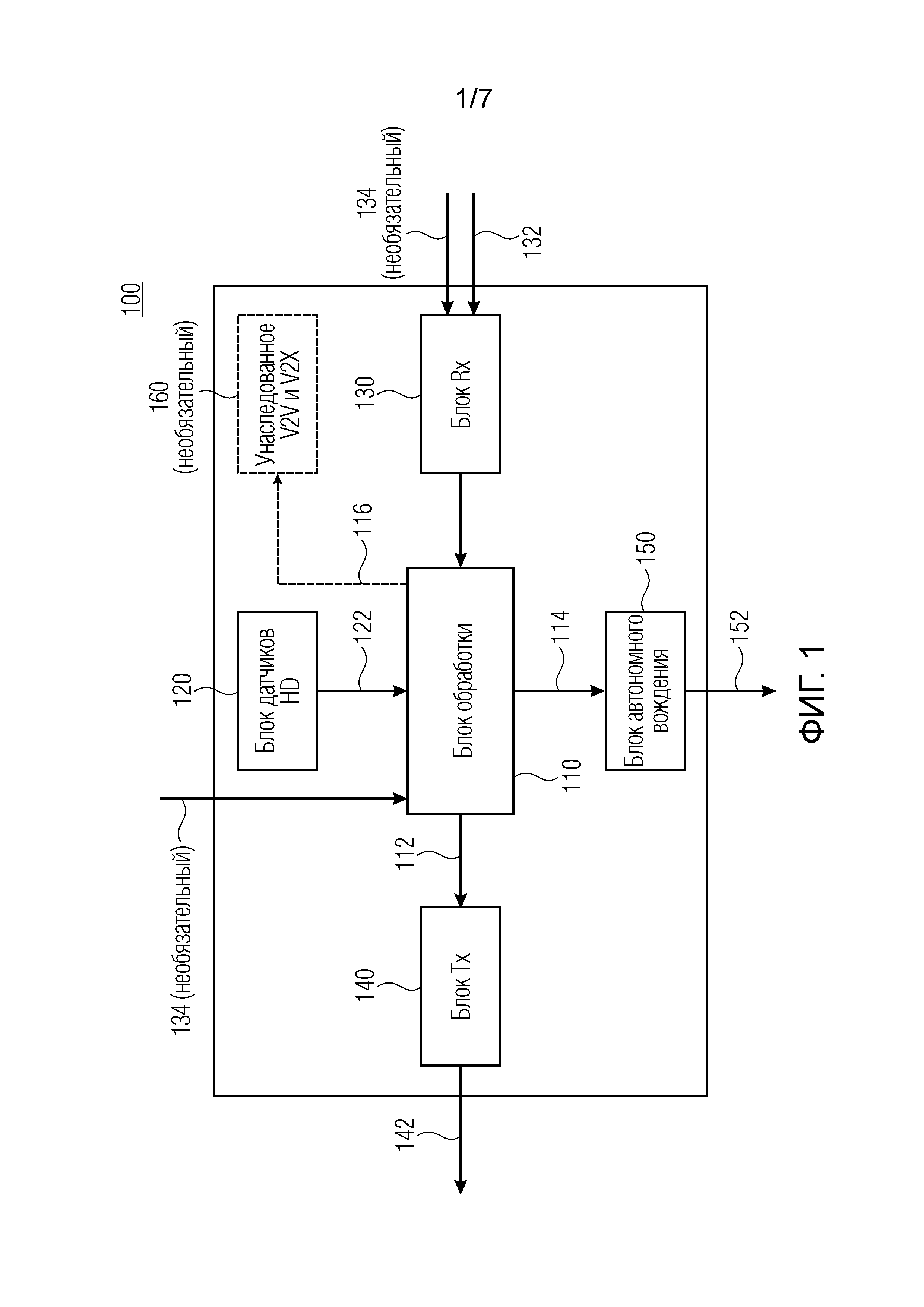
Фиг. 1 показывает принципиальную структурную схему автомобильного внутреннего блока (CIU) согласно варианту осуществления. CIU содержит процессорный блок 110, который выполнен с возможностью выдавать карту высокого разрешения. CIU 100 дополнительно содержит блок 120 датчиков, который выполнен с возможностью для предоставления данных с датчиков, представляющих собой окружающие условия на периферии устройства. Например, блок 120 датчиков может содержать датчики для обнаружения и измерения дальности до объекта, такие как радиолокатор (радиочастотное устройство обнаружения и определения дальности) или лазерный локатор (лазерное устройство обнаружения и определения дальности). Окружающими условиями, например, могут быть расстояние от устройства до соседних или дополнительных объектов, скорость устройства, положение устройства на карте HD и/или в абсолютной системе координат, в том числе, возвышение устройства, или тому подобное. Данные 122 с датчиков, например, могут содержать информацию о размере, скорости и/или положении объектов, которые являются считываемыми или обнаруживаемыми с помощью блока 120 датчиков. Блок 120 датчиков может быть выполнен с возможностью сканировать периферию устройства с использованием технологии формирования изображений для предоставления данных 122 с датчиков. Окружающими условиями может быть расстояние до выявленных объектов в пределах периферии.
CIU 100 дополнительно содержит блок 130 приемника, который выполнен с возможностью принимать данные 132, представляющие собой карту высокого разрешения, предоставленную внешним источником, таким как дополнительный CIU и/или RSU, и/или сеть, содержащая множество устройств, являющихся CIU и/или RSU.
Процессорный блок 110 выполнен с возможностью объединять принятую карту HD и данные 122 с датчиков, с тем чтобы формировать и выдавать карту HD из CIU 100.
CIU 140 содержит блок 140 передатчика, который выполнен с возможностью для передачи результата 112 объединения, выполненного процессорным блоком 110. Блок 140 передатчика выполнен с возможностью выдавать сигнал 142 для передачи результата 112, при этом, сигнал 142 предпочтительно является беспроводным сигналом.
CIU 100 дополнительно содержит блок 150 генератора команд, который выполнен с возможностью формировать командный сигнал 152, представляющий собой команду управления транспортным средством для транспортного средства, несущего CIU 100. Процессорный блок 110 выполнен с возможностью выдавать информацию 114 в генератор 150 команд, так чтобы блок 150 генератора команд мог получать командный сигнал 152 на ее основании. Информация 114 основана на карте HD, сформированной процессорным блоком 110. Согласно одному из примеров, информацией 114 является карта HD. Согласно еще одному примеру, информация 114 соответствует результату 112. Результат 112, например, получается посредством модификации информации, содержащейся в принятой карте HD, данными 122. Карта HD, принятая благодаря данным 132, например, может содержать информацию о скорости или положении других объектов на карте. Собственные данные с датчиков могут содержать более точные данные или в большей степени актуальные данные, так чтобы блок 110 обработки мог пролонгировать или обновлять данные принятой карты HD собственными данными с датчиков. Согласно примеру, принятая карта HD охватывает зону, которая обширнее или больше по сравнению с дальностью действия, воспринимаемой блоком 120 датчиков. Блок 110 обработки может быть выполнен с возможностью обновлять или подновлять только те зоны или объекты данных на принятой карте HD, для которых имеются в распоряжении другие данные. Другие данные могут формироваться блоком 120 датчиков или могут приниматься посредством использования блока 130 приемника, принимающего дополнительную карту HD. Дополнительная карта HD может покрывать зону, которая отлична от второй карты HD, и/или может иметь другую отметку времени.
CIU может быть выполнен с возможностью определять командные сигналы 152 на основании так называемой базовой карты. Такая базовая карта может содержать информацию о проезжих частях, таких как реки, улицы, или тому подобное, и, например, может использоваться в навигационных системах. Такая базовая карта может быть общей для множества CIU или RSU и может комбинироваться с данными карты HD. Устройство 100 может быть выполнено с возможностью пропускать передачу, такую как базовая карта, так как эта базовая карта уже может присутствовать на передающем узле. Для экономии полосы пропускания и энергии, устройство может быть выполнено с возможностью передавать результат объединения карты HD, принятой посредством сигнала 132, и данных 122 с датчиков в отсутствие такой базовой карты. Таким образом, принятая карта 132 HD также может быть картой в отсутствие упомянутой базовой карты, при этом, блок 110 обработки может быть выполнен с возможностью объединять принятую карту высокого разрешения с данными с датчиков и с базовой картой, которая также упоминается как статическая карта. Для распределения уместной динамической информации, может быть достаточно распределять, то есть, передавать только результат объединения в виде карты высокого разрешения, которая объединяется со статической картой на принимающем узле.
Командный сигнал 152 может быть выполнен с возможностью управлять транспортным средством. Командный сигнал 152, например, может относиться к сигналу, указывающему транспортному средству, что следует затормозить, разогнаться, повернуть, набрать высоту, снизиться, связаться, или тому подобное.
CIU 100 может быть выполнен с возможностью принимать дополнительные данные с помощью блока 130 приемника, дополнительные данные представляют собой по меньшей мере одну дополнительную карту HD, и объединять принятые карты HD и данные 122 с датчиков, с тем чтобы выдавать свою собственную карту HD.
Карты HD, передаваемые посредством сигнала 142 или принимаемые посредством сигнала 132, могут содержать большой объем данных. Для приема большого объема данных и/или для передачи большого объема данных, блок 130 приемника и блок 140 передатчика выполнены с возможностью, соответственно, принимать сигнал миллиметрового диапазона и передавать сигнал миллиметрового диапазона. Под сигналом миллиметрового диапазона может подразумеваться сигнал, который передается, с тем чтобы иметь длину волны, имеющую значение по меньшей мере 1 миллиметр и не более 10 миллиметров, что может соответствовать частотному диапазону, имеющему значение по меньшей мере 30 ГГц и не более 300 ГГц, и предоставляющему возможность, чтобы передавались высокие скорости передачи битов. В качестве неограничивающего примера, частота миллиметрового диапазона может начинаться с 24,25 ГГц, принимая во внимание мировые правила радиосвязи. Блок 140 передатчика может быть выполнен с возможностью передавать карту высокого разрешения со скоростью передачи битов, которая имеет значение по меньшей мере 2 Гбит/с, по меньшей мере 2,1 Гбит/с или по меньшей мере 2,2 Гбит/с. Например, размер кадра, который имеет значение по меньшей мере 2,75 Мбайт, может требоваться в качестве объема данных на каждый кадр для передачи карты высокого разрешения, в частности, при передаче объединенных карт высокого разрешения. Процессорный блок 110 может быть выполнен с возможностью выдавать карту высокого разрешения, с тем чтобы имела объем данных, который имеет значение по меньшей мере 2,75 Мбайт, по меньшей мере 3,25 Мбайт или по меньшей мере 3,75 Мбайт.
Более того, процессорный блок может быть выполнен с возможностью формировать карту HD с временными интервалами, с тем чтобы обеспечивать непрерывное обновление карты HD. Одиночная карта HD может подразумеваться в качестве кадра карты HD. Например, процессор может быть выполнен с возможностью формировать карты HD, кадры, соответственно, с временным интервалом между ними, имеющим значение не более 10 мс, 8 мс или даже 7 мс. Это может предусматривать обновление карты HD в реальном времени. Реальное время может подразумеваться в качестве предоставления данных достаточно своевременно, так чтобы не было задержки или отрицательного влияния на приемной стороне от все еще присутствующей задержки. Например, передвижение со скоростью 180 километров в час, то есть, 50 метров в секунду, и прием или формирование карты HD с интервалом по времени в 10 мс эквивалентны перемещению транспортного средства, несущего CIU, приблизительно на 0,5 метра. Датчики транспортного средства могут считывать объекты, находящиеся дальше, например, по меньшей мере в 10 метрах, по меньшей мере 30 метрах или по меньшей мере 100 метрах, так что задержка на 0,5 метров или 10 мс может компенсироваться без какого бы то ни было отрицательного влияния и, таким образом может рассматриваться в качестве реального времени, хотя и имея временные такты между одиночными кадрами.
Он же в 110 может быть выполнен с возможностью формировать карту высокого разрешения, с тем чтобы содержала картографическую информацию с радиусом по меньшей мере 300 метров вокруг CIU.
CIU 100 может содержать необязательный унаследованный интерфейс 160, выполненный с возможностью передавать данные согласно унаследованной схеме связи V2V или V2X. Для этого, блок 110 обработки может быть выполнен с возможностью определять или извлекать подробности 116 данных, принятых в связи с принимаемой картой HD и/или в связи с данными 122 с датчиков. Блок 110 обработки может быть выполнен с возможностью приводить извлеченные подробности 116, такие как информация, относящаяся к службам безопасности дорожного движения, например, дорожным пробкам, дорожно-транспортным происшествиям, дорожному строительству, и т. д., в соответствие со схемой связи и передавать такие извлеченные подробности 116 согласно схеме связи. Говоря простыми словами, CIU может быть совместим с существующими схемами связи, хотя это может требовать преобразования данных.
Процессорный блок 110 может быть выполнен с возможностью формировать карту высокого разрешения, с тем чтобы содержала ту же самую систему координат по сравнению с принятой картой 132 HD. Это может предоставлять возможность для увеличения площади карты и/или для получения сводной карты, которая может повторно передаваться и/или использоваться в целом.
CIU 100 может быть выполнен с возможностью принимать необязательную информацию 134, например, с использованием блока 130 приемника. Информация 134 может содержать информацию, указывающую интересующую область на карте высокого разрешения, подлежащей формированию. Блок обработки может быть выполнен с возможностью формировать карту высокого разрешения, с тем чтобы имела высокий уровень разрешения, то есть, высокий уровень информации, в интересующей области по сравнению с областью вне интересующей области. Интересующая область, например, может быть местом поворота или пунктом назначения транспортного средства или транспортного средства, несущего CIU. Например, вдоль маршрута, по которому следует ехать транспортному средству, карта высокого разрешения может формироваться с более высоким уровнем разрешения по сравнению с областями или дорогами вне маршрута, где транспортное средство вероятно не поедет.
Другими словами, фиг. 1 показывает структурную схему CIU. Блок датчиков HD собирает информацию для карты HD, например, пользуясь лазерным локатором. Блок Rx миллиметрового диапазона принимает карты HD в реальном времени, например, с пропускной способностью более 2,2 Гбит/с и с задержкой меньше 10 мс, с окружающих автомобилей и/или RSU. Блок обработки карты HD рассчитывает карту HD, поддерживающую по меньшей мере 300 метров впереди, комбинируя многочисленные карты HD, принятые блоком Rx миллиметрового диапазона. Блок Tx миллиметрового диапазона пересылает карту HD, рассчитанную в блоке обработки карты HD, в реальном времени, например, с пропускной способностью более чем 2,2 Гбит/с и с задержкой меньше 10 мс на окружающие автомобили и/или RSU. Блок автономного вождения формирует команды вождения автомобиля для акселератора, тормозов и рулевого механизма на основании карты HD, рассчитанной в блоке обработки карты HD.
Фиг. 2 показывает принципиальную структурную схему придорожного блока (CIU) согласно варианту осуществления. RSU 200 может быть выполнен с возможностью выдавать карты HD, как описано применительно к CIU 100. В противоположность CIU 100 и RSU 200 могут быть реализованы без блока автономного вождения и генератора команд 150, соответственно. Придорожный блок 200 может выдавать карты HD на транспортное средство, в особенности в сценариях, в которых транспортному средству, несущему CIU, недостает других транспортных средств, чтобы предусматривать карту HD.
RSU 200 может содержать блок 210 обработки, который может быть идентичен блоку 110 обработки и выполнен с возможностью выдавать карту HD. RSU 200 может содержать блок 220 датчиков, который может быть идентичен блоку 120 датчиков и выполнен с возможностью для предоставления данных 222 с датчиков, которые могут быть идентичны данным 122 с датчиков и представлять собой окружающие условия на периферии RSU 200. RSU 200 содержит блок 230 приемника, который может быть идентичен блоку 130 приемника и может быть выполнен с возможностью принимать данные 232, представляющие собой вторую, внешнюю карту высокого разрешения, как было описано применительно к данным 132.
Процессорный блок 210 выполнен с возможностью объединять внешнюю карту 232 высокого разрешения и данные 222 с датчиков, с тем чтобы выдавать карту высокого разрешения, как указываемая сигналом 212. RSU 200 дополнительно содержит блок 240 передатчика, выполненный с возможностью для передачи результата объединения второй карты высокого разрешения и данных 222 с датчиков посредством использования сигнала 242. Результатом может быть, как было пояснено в связи с CIU 100, совмещение или объединение карт HD в отсутствие назначенной карты. В качестве альтернативы, назначенная карта также может передаваться, что может приводить к более полному набору данных в обмен на стоимость дополнительных данных.
Карта высокого разрешения, передаваемая посредством сигнала 242, содержит картографическую информацию в пределах радиуса по меньшей мере 300 метров вокруг RSU, по меньшей мере 350 метров или по меньшей мере 400 метров.
Как было описано применительно к CIU 100, RSU 200 может содержать унаследованный интерфейс 260, выполненный с возможностью передавать извлеченные детали согласно унаследованной схеме связи V2X и/или передавать детали 216 в транзитную сеть. Таким образом, CIU 100, RSU 200 могут быть выполнены с возможностью поддерживать связь с унаследованными сетями, при этом, RSU 200 может замещать связь между транспортными средствами транзитной связью.
Подробности, приведенные в отношении связи, передачи или объема передаваемых данных, которые пояснены в связи с CIU 100, также могут применяться к RSU 200, то есть, сформированная карта высокого разрешения может быть больше, чем площадь, считываемая блоком 220 датчиков, блок 230 приемника и блок 240 передатчика могут пользоваться для связи миллиметровым диапазоном, блок 240 передатчика может быть выполнен с возможностью для передачи карты высокого разрешения на скорости передачи битов, которая имеет значение по меньшей мере 2 Гбит/с, карта высокого разрешения может иметь объем данных, который имеет значение по меньшей мере 2,75 Мбайт, по меньшей мере 3,25 Мбайт или по меньшей мере 3,75 Мбайт. Более того, процессорный блок может быть выполнен с возможностью формировать карту высокого разрешения в виде кадра или множества кадров, два следующих друг за другом кадра разнесены по времени на интервал не более 10 мс, предпочтительно 8 мс, а предпочтительнее, 6 мс.
Блок 220 датчиков может использовать технологию формирования изображений для предоставления данных 222 с датчиков, как было описано применительно к блоку 120 датчиков, например, блок 220 датчиков может содержать датчик с лазерным локатором.
При обращении к фиг. 1, принятая карта 132 высокого разрешения может быть картой высокого разрешения, передаваемой посредством сигнала 242, то есть, картой 242 высокого разрешения. Наоборот, карта 332 высокого разрешения может быть картой 142 высокого разрешения, передаваемой посредством CIU 100. Принимая во внимание, что объединение может подразумеваться в качестве адаптации участка принятой карты, блок 120 или 220 датчиков может быть выполнен с возможностью сканировать периферию соответственного устройства 100 или 200 с использованием датчика с лазерным локатором, при этом, окружающими условиями может быть расстояние до выявленных объектов в пределах периферии. Принятая карта 132 или 232 может быть картой, принятой с дополнительного устройства, принятая карта высокого разрешения может содержать информацию, относящуюся к объектам в зоне принятой карты высокого разрешения, сформированной соответственным дополнительным устройством. Процессорный блок 110, 210, соответственно, может быть выполнен с возможностью адаптировать информацию, относящуюся к одному или более объектов на принятой карте, с использованием расстояния между соответственным устройством и объектами, выявленными блоком 120, 220 датчиков, соответственно, и с использованием фактического положения устройства, несущего соответственный процессорный блок 110 или 210.
Под RSU, возможно являющимся аналогичным CIU, может подразумеваться, что блок 230 приемника выполнен с возможностью принимать данные, представляющие собой по меньшей мере третью карту высокого разрешения, и что процессорный блок 210 выполнен с возможностью объединять вторую и третью карты высокого разрешения и данные с датчиков, с тем чтобы выдавать первую карту высокого разрешения. Более того, процессорный блок 210 может быть выполнен с возможностью формировать карту высокого разрешения, с тем чтобы содержала ту же самую систему координат по сравнению с принятой картой высокого разрешения. Более того, процессорный блок может быть выполнен с возможностью объединять принятую карту высокого разрешения, данные с датчиков и статическую карту, с тем чтобы выдавать первую карту высокого разрешения. RSU может быть выполнен с возможностью не передавать статическую карту при передаче результата объединения карты высокого разрешения и данных с датчиков.
Другими словами, фиг. 2 показывает структурную схему RSU. Блок датчиков HD собирает информацию для карты HD, например, пользуясь лазерным локатором. Блок Rx миллиметрового диапазона принимает карты HD в реальном времени, например, с пропускной способностью более 2,2 Гбит/с и с задержкой меньше 10 мс, с окружающих RSU и/или автомобилей. Блок обработки карты HD рассчитывает карту HD, поддерживающую по меньшей мере 300 метров впереди наряду с дорогой или дорогами, комбинируя многочисленные карты HD, принятые блоком Rx миллиметрового диапазона. Блок Tx миллиметрового диапазона пересылает карту HD, рассчитанную блоком обработки карты HD, в реальном времени, например, с пропускной способностью более чем 2,2 Гбит/с и с задержкой меньше 10 мс на окружающие RSU и/или автомобили. RSU для автономного вождения может содержать блок датчиков HD, например, датчик с лазерным локатором, для сбора информации для карты HD. Он дополнительно может содержать блок Rx миллиметрового диапазона для приема карт HD в реальном времени, например, с пропускной способностью более 2,2 Гбит/с и с задержкой меньше 10 миллисекунд, с окружающих RSU и/или автомобилей. Он дополнительно может содержать блок обработки карты HD для расчета карты HD, поддерживающей по меньшей мере 300 метров впереди наряду с дорогой(ами), комбинируя многочисленные карты HD, принятые CIU или RSU. Он дополнительно может содержать блок Tx миллиметрового диапазона для пересылки карты, рассчитанной в трансляторе CIU, в реальном времени, например, с пропускной способностью больше 2,2 Гбит/с и с задержкой меньше 10 мс, на окружающие RSU и/или автомобили (CIU).
Фиг. 3 показывает принципиальную структурную схему карты 302 HD, например, которая может приниматься посредством CIU 100 или RSU 200. Хотя фиг. 3 иллюстрирует наличие CIU 100, в качестве альтернативы, может присутствовать RSU 200. В дополнение, могут присутствовать дополнительные CIU или RSU согласно вариантам осуществления, описанным в материалах настоящей заявки. CIU 100 может быть выполнен с возможностью сканировать периферию 304, например, с использованием блока 120 датчиков. При приеме карты 302 HD, которая может быть картой 132 HD, CIU 100 может быть выполнен с возможностью адаптировать зону карты 302 HD, применительно к которой он получил собственные данные с датчиков. Таким образом, зона высокого разрешения, формируемая посредством CIU 100 или RSU 200, может быть большей, чем площадь периферии 304.
Карта HD может содержать метаданные, такие как отметки времени, относящиеся к зоне или объекту 306 на карте 302 HD. Таким образом, процессорный блок 110 или 210 может быть выполнен с возможностью определять давность информации, относящейся к зоне или объекту 306. В качестве альтернативы, карта HD может формироваться, с тем чтобы содержать информацию, указывающую давность других частей карты высокого разрешения. С использованием давности информации, процессорный блок 110 или 210 может быть выполнен с возможностью игнорировать информацию, которая имеет давность выше некоторого порогового значения, то есть, информация, являющаяся достигшей определенной давности или слишком старой, может игнорироваться. Например, информация, относящаяся к объекту 306, являющемуся пешеходом, переходящим улицу, может игнорироваться спустя некоторое время, когда другой CIU или RSU уже не выявил пешехода. Просто пешеход мог перейти улицу и мог покинуть нее. Пороговое значение для устаревания информации может быть разным для определенных классов объектов, например, пешеходы, животные или другие транспортные средства могут покидать свое положение, при этом, весьма вероятно, что здания, и тому подобное, будут оставаться в определенном положении в течение более длительного времени. Например, пороговым значением для устаревания информации применительно к объектам, которые считаются движущимися, например, может быть один час, 30 минут или 5 минут, или даже меньшее значение. Пороговым значением для устаревания применительно к классу объектов, которые считаются статичными, например, может быть месяц, неделя или сутки, или меньшее значение.
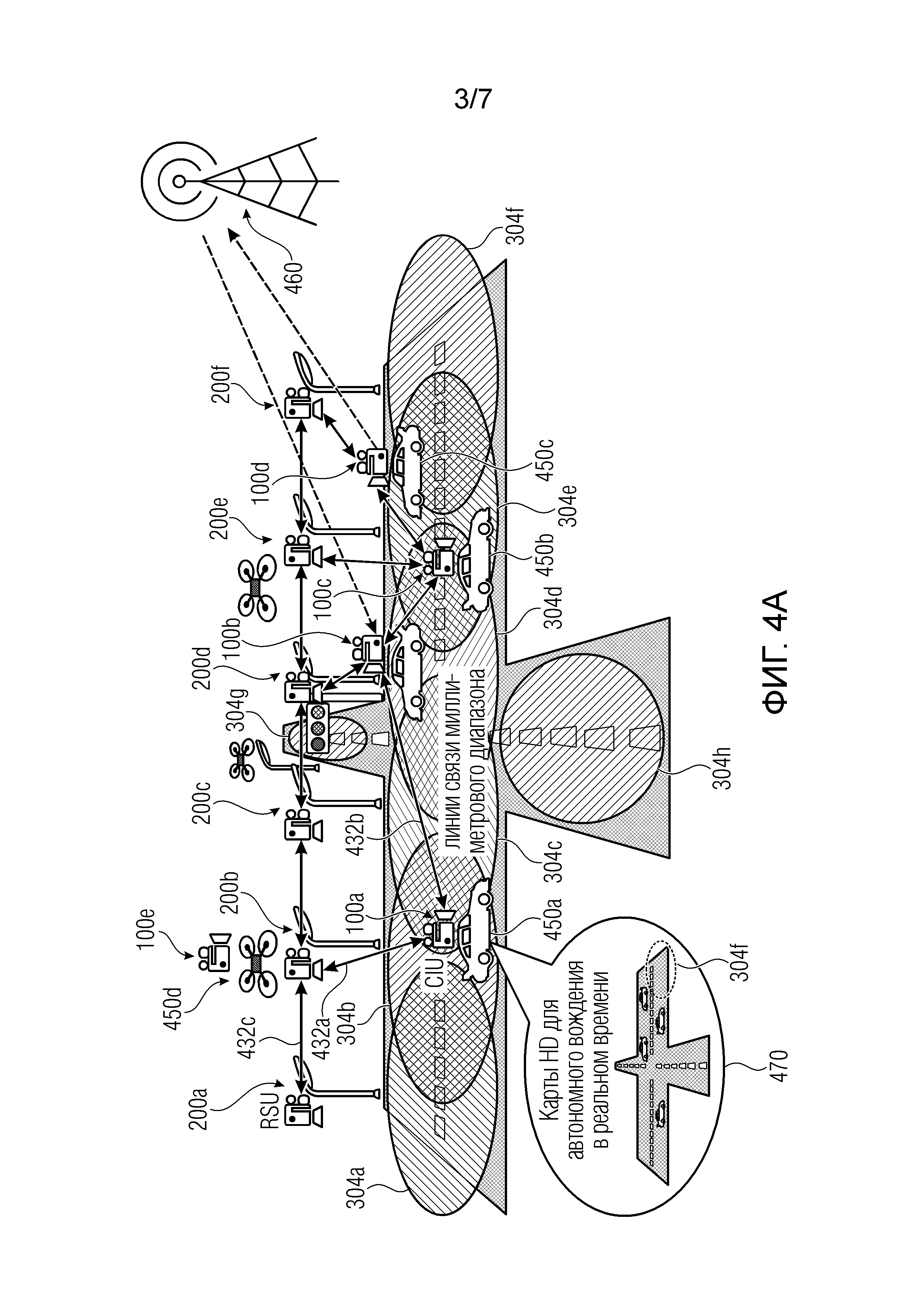
Фиг. 4 показывает принципиальную структурную схему сети 400 связи, содержащей множество CIU с 100a по 100e, несомых или являющихся установленными на транспортные средства с 450a по 450d, которые, например, могут быть автомобилями или самодвижущимися аппаратами. Транспортные средства, в качестве альтернативы, могут быть другими ведомыми или движимыми по воздуху транспортными средствами. Сеть 400 связи дополнительно содержит множество RSU с 200a по 200f. Каждые из CIU со 100a по 100e и RSU с 200a по 200f связаны с соответственными перифериями с 304a по 304h, которые могут частично или полностью перекрываться, но также могут быть расположены на расстоянии друг от друга. Каждая из областей с 304a по 304h может указывать зону действия датчика HD, такого как блок 120 или 220 датчиков. Каждый CIU со 100a по 100e может быть выполнен с возможностью поддерживать связь с соседними CIU и/иди соседними RSU, как указано двунаправленным линиями 432a и 432b связи, которые, например, могут представлять собой карты 132, 142, 232 и/или 242 высокого разрешения.
Один или более из CIU со 100a по 100e и/или RSU может быть выполнен с возможностью поддерживать связь с традиционными V2X в текущей сети 5G и/или транзитной передачи, которая принимает и/или передает информацию, указывающую скорость, торможение, и т. д., для узлов в сети. Каждые из CIU и/или RSU могут предоставлять карты 470 HD для автономного вождения и/или полета в реальном времени.
Таким образом, множество узлов сети, то есть, RSU и CIU, могут быть выполнены с возможностью обмениваться картами 470 высокого разрешения, сформированными соответственным узлом. По меньшей мере одно устройство RSU и/или CIU может быть выполнено с возможностью объединять карты высокого разрешения узлов, с тем чтобы формировать сводную карту высокого разрешения.
Как указано применительно к карте 470 HD, несмотря на неспособность «видеть» периферию 304f, CIU 100a, а потому, транспортное средство 450a, могут быть осведомлены об объектах, или тому подобном, в этой зоне.
Это может достигаться посредством связи между RSU, например, как указано двунаправленной связью 432c.
Транспортные средства с 550a по 550d могут быть выполнены с возможностью автономно перемещаться в ответ на командный сигнал 152, представляющий собой команду управления транспортным средством. CIU, установленный на транспортное средство 540, может быть выполнен с возможностью передавать сформированную карту высокого разрешения на другие CIU, в структуры сети связи, в сети, например, сети, как описанные в связи с фиг. 5 и фиг. 6, на дополнительные транспортные средства и/или RSU.
Другими словами, фиг. 4 показывает типичный сценарий по вариантам осуществления, описанным в материалах настоящей заявки. Предложение вариантов осуществления может состоять в том, чтобы осуществлять автономное вождение автомобилей или самодвижущихся аппаратов. Несколько автомобилей реализуют или несут CIU, описанные в связи с фиг. 1 для осуществления автономного вождения, пользуясь картой HD, рассчитанной посредством CIU. На фиг. 4, RSU, поясненные в связи с фиг. 2, например, расположены на фонарных столбах и дорожных знаках, например, с интервалами приблизительно каждые 100 метров для содействия автономному вождению доставкой карт HD на оборудованные CIU автомобили. Многочисленные CIU в находящихся поблизости автомобилях и многочисленные RSU на разных фонарных столбах на дороге (или дорогах, в том числе, перекрестках), обладают функцией для образования локальных сетей, чтобы обмениваться информацией карт HD для расширения охвата карт HD и для избегания проблем блокировки, комбинируя многочисленные карты HD, измеренные с разных углов (мест). Поскольку требуемая точность карты HD зависит от расстояния от интересующего места (то есть, более высокая точность может быть необходима в зоне, ближайшей к целевому автомобилю с автономным вождением), CIU и RSU могут поддерживать адаптивное снижение разрешения карт HD, подлежащих пересылке, на основании разности расстояний от интересующего места. CIU может поддерживать интерфейс с унаследованными средствами связи V2V и V2X для обмена сокращенной информацией, такой как чрезвычайное происшествие, предупреждения, местоположение, скорость, и тому подобное, с окружающими транспортными средствами через V2V или с сервером безопасности дорожного движения через V2X. Подобным образом, RSU поддерживает интерфейс с унаследованными устройствами через сеть связи Tx и транзитной передачи, присоединенную к серверу безопасности дорожного движения для обмена сокращенной информацией, такой как чрезвычайные происшествия, предупреждения, местоположение, скорость, и тому подобное. Варианты осуществления, описанные в материалах настоящей заявки, могут быть применены к самодвижущимся аппаратам, летающим в городе, где может быть обязательным автономное вождение. Варианты осуществления могут предоставлять возможность для реализации доставки карт HD в реальном времени, реализации автономного вождения транспортных средств и самодвижущихся аппаратов и/или улучшения служб безопасности дорожного движения.
В частности, как в некоторых сценариях, датчик с лазерным локатором может быть не способен измерять расстояние до 300 метров, совместная работа между разными RSU и/или CIU может предоставлять возможность для формирования карт с по меньшей мере 300 метров, в частности, в городских средах города с многими перекрестками и блокирующими объектами. Варианты осуществления предусматривают идею и концепцию для реализации инфраструктурной сети ради доставки информации карт HD на автомобили для осуществления автономного вождения. Концепция описанных вариантов осуществления также может быть применена к будущим транспортным системам для самодвижущихся аппаратов, где автономное вождение может быть обязательным для вождения и полета на большие расстояния.
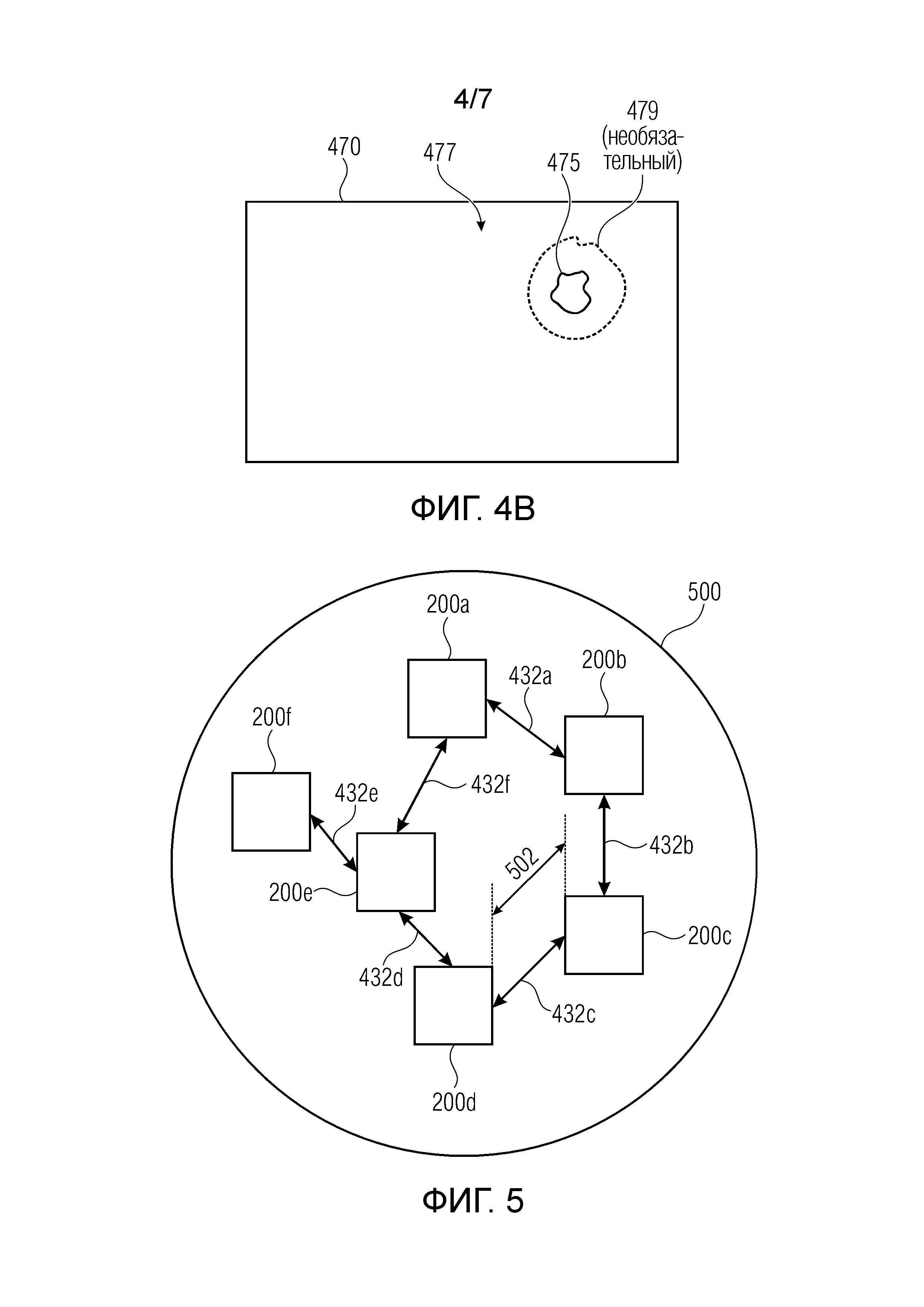
Фиг. 4b показывает принципиальную структурную схему карты 470 высокого разрешения согласно варианту осуществления. Карта 470 высокого разрешения может содержать интересующую область 475, например, связанную с CIU. Например, CIU или RSU, формирующие карту 470 высокого разрешения, могут быть выполнены с возможностью принимать информацию, указывающую интересующую область 475, и формировать карту высокого разрешения, подлежащую предоставлению в указывающий CIU. В интересующей области, разрешение карты 470 высокого разрешения может иметь более высокий уровень по сравнению с областью 477 вне интересующей области 475. Уровень разрешения может иметь отношение к типу объектов, представляемых на карте высокого разрешения, но также может иметь отношение к разрешению в показателях точности протяженности объектов на карте 470 высокого разрешения. Например, область 477, обособленная от интересующей области 475, может быть размещена на большом расстоянии от CIU, с которым связана интересующая область 475, или может быть областью, через которую не запланирован проезд CIU, с которым связана интересующая область 475. Наличие, положение и размер объектов, таких как транспортные средства, на улице в этом обособленном местоположении, может быть исключено или по меньшей мере уменьшено в отношении объема данных на карте, с тем чтобы добиваться меньшего объема данных карты 470 в области 477 по сравнению с интересующей областью 475. Карта 470 высокого разрешения может формироваться, с тем чтобы содержать множество областей 475, 477 и, по выбору, 479, то есть, больше двух, при этом, каждая область может иметь разный уровень разрешения. Уровень разрешения в интересующей области 475 может быть выше, чем в области 477 и/или 479 по меньшей мере в 2 раза, по меньшей мере в 3 раза, по меньшей мере в 4 раза, или в большей степени. Интересующая область может содержать часть не более 50% карты 470 высокого разрешения, предпочтительно не более 40% или, предпочтительнее, не более 30% площади карты 470 высокого разрешения.
Фиг. 5 показывает принципиальную структурную схему сети 500, содержащей множество RSU с 200a по 200f. Например, RSU с 200a по 200f сети 400 связи могут по меньшей мере частично формировать сеть 500. Как проиллюстрировано на фиг.4, RSU расположены на некотором расстоянии друг от друга, с тем чтобы охватывать проезжую часть транспортной системы, такую как дорожные или летные маршруты. RSU могут поддерживать связь друг с другом согласно дальности передачи двунаправленных линий с 432a по 432f связи. RSU могут быть расположены на некотором расстоянии друг от друга, то есть, не более суммы дальностей действия блоков датчиков обоих RSU, так чтобы периферии RSU были по существу без разрывов, то есть, применительно к каждому из мест или интервалов вдоль проезжей части, имелась в распоряжении информация для HD. Например, расстояние 502 между соседними RSU может быть не более 500 м, не более 400 метров или не более 300 метров.
Сеть 500, в качестве альтернативы, может содержать RSU с 200a по 200f, при этом, RSU выполнен с возможностью обмениваться картами высокого разрешения, сформированными посредством RSU с 200a по 200f. По меньшей мере один из RSU с 200a по 200f может быть выполнен с возможностью объединять карты высокого разрешения, принятые с других RSU сети 500 связи, с тем чтобы формировать сводную карту высокого разрешения. Таким образом, по сравнению с сетью 400, RSU, образующий сеть 500, может формировать сводную карту высокого разрешения.
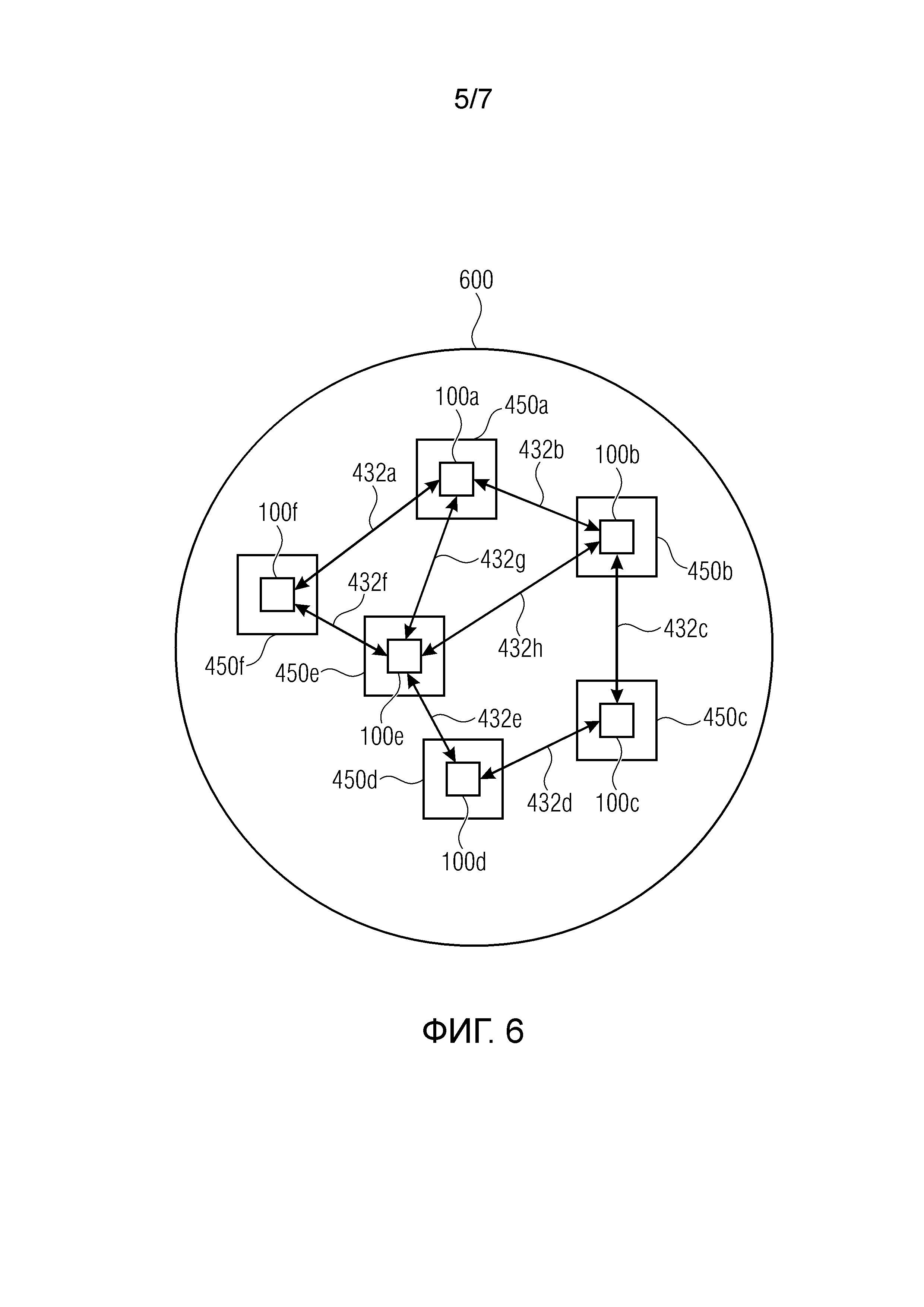
Фиг. 6 показывает принципиальную структурную схему сети 600, содержащей множество CIU со 100a по 100f, при этом, каждый из CIU, например, может быть установлен или переносится на транспортном средстве с 450a по 450f. Аналогично сети 500 связи, CIU со 100a по 100f могут поддерживать связь друг с другом с помощью линий с 432a по 432h связи, с тем чтобы обмениваться картами высокого разрешения, сформированным посредством CIU со 100a по 100f. По меньшей мере один из CIU может быть выполнен с возможностью объединять карты высокого разрешения с других устройств сети связи, с тем чтобы формировать сводную карту высокого разрешения.
Под связью и обменом картами высокого разрешения, описанными в связи с фиг. с 4 по 6, могло подразумеваться, что узел сети, принимающий карту высокого разрешения, включает эту карту в существующую карту и, кроме того, передает карту, полученную посредством этого, на дальнейший узел. В силу этого, шаг за шагом, размер карты может возрастать, и карта высокого разрешения, сформированная устройством, может содержать области, которые не видны ни устройству, передающему входную карту, ни устройству, формирующему карту высокого разрешения. Говоря простыми словами, периферия, сканируемая датчиками CIU или RSU, может распространяться по большим частям сети или даже по целой сети.
Даже если нет окружающих CIU или присутствующих RSU, в таком случае, CIU по-прежнему может работать подобно системе автономного вождения, то есть, связь с другим CIU и/или RSU может быть полезна, но не обязательна.
Ретранслятор CIU может относиться к сети связи, такой как сеть 600, содержащей множество или большое количество CIU, для расчета карты HD с большим охватом и меньшей проблемой блокировки, посредством обмена информацией карт HD между многочисленными CIU. Ретранслятор CIU может быть связан с сетью связи, такой как сеть 500, содержащая множество или большое количество CIU, для расчета карты HD с большим охватом и меньшей проблемой блокировки посредством обмена информацией карт HD между многочисленными CIU. Ретранслятор CIU-RSU может связываться с сетью связи, такой как сеть 400 связи, содержащей множество или большое количество CIU и множество или большое количество RSU для расчета карты HD с более широким охватом и меньшей проблемой блокировки посредством обмена информацией карт HD между многочисленными CIU и RSU. CIU может использоваться в сетях связи и содержать функцию адаптивного уменьшения разрешения карты HD, подлежащей пересылке, на основании разности расстояний от интересующего места. Это может упоминаться как адаптивное разрешение CIU. В то время как может подразумеваться функция адаптивного разрешения RSU, RSU используется в сетях связи и имеет функцию адаптивного уменьшения разрешения карты HD, подлежащей пересылке, на основании разности расстояний от интересующего места, имеющего отношение к CIU, который запрашивает или принимает карту высокого разрешения. То есть, CIU или RSU может быть выполнен с возможностью адаптировать разрешение формируемой карты на основании информации, указывающей интересующую область. В частности, когда объединение карт HD выполняется посредством CIU или RSU, объем кадра данных может превышать объем 2,75 Мбайт. Это может давать в результате скорость передачи данных больше 2,2 Гбит/с, например, при передаче данных в реальном времени. Адаптивное разрешение, то есть, предоставление карты высокого разрешения, так чтобы содержала разные области, области содержат разные уровни разрешения, может предотвращать или по меньшей мере уменьшать превышение объема данных и/или скорости передачи данных. Другими словами, для обеспечения задержки в 10 мс, объем данных на каждый кадр должен быть меньше 2,75 Мбайт в случае скорости передачи данных 2,2 Гбит/с, но этот объем данных или эта скорость передачи данных могут быть превышены, при этом, превышение может ограничиваться допустимым уровнем посредством уменьшения разрешения на участках или в областях карт.
CIU может содержать интерфейс с унаследованными средствами связи V2V и V2X (унаследованные функции CIU) для обмена сокращенной информацией, такой как чрезвычайные ситуации, предупреждения, местоположение, скорость, и т. д. RSU может содержать интерфейс с унаследованными средствами связи V2X (унаследованную функцию RSU) и средствами связи транзитной сети, транзитная сеть присоединена к серверам безопасности дорожного движения для обмена сокращенной информацией, такой как чрезвычайные ситуации, предупреждения, местоположение, скорость, и т. д. Самодвижущийся аппарат (беспилотный летательный аппарат) может реализовывать или нести CIU для автономного вождения посредством обмена информацией карт HD с окружающими самодвижущимися аппаратами и/или RSU.
Применениями для вариантов осуществления, описанных в материалах настоящей заявки, например, могут быть автономные вождение или полет для автомобилей и/или самодвижущихся аппаратов, служб безопасности дорожного движения, такие как избежание столкновений, и тому подобное, и/или они могут находиться в сфере умного города, то есть, планирования и отслеживания маршрута движения, путеводителя по городу, парковки автомобилей, и тому подобного.
Хотя некоторые аспекты были описаны в контексте устройства, ясно, что эти аспекты также представляют собой описание соответствующего способа, где вершина блок-схемы или устройство соответствуют этапу способа или признаку этапа способа. Аналогично, аспекты, описанные в контексте этапа способа, также представляют собой описание соответствующих вершины блок-схемы или элемента, либо признака соответствующего устройства.
В зависимости от требований некоторой реализации, варианты осуществления изобретения могут быть реализованы в аппаратных средствах или в программном обеспечении. Реализация может выполняться с использованием цифрового запоминающего носителя, например, гибкого диска, DVD (цифрового многофункционального диска), CD (компакт-диска), ПЗУ (постоянного запоминающего устройства, ROM), ППЗУ (программируемого ПЗУ, PROM), СППЗУ (стираемого ППЗУ, EPROM), ЭСППЗУ (электрически стираемого ППЗУ, EEPROM) или памяти FLASH, имеющего электронным образом считываемые сигналы управления, хранимые на нем, которые взаимодействуют (или способны взаимодействовать) с программируемой компьютерной системой, так чтобы выполнялся соответственный способ.
Некоторые варианты осуществления согласно изобретению содержат носитель данных, имеющий электронным образом считываемые сигналы управления, которые способны взаимодействовать с программируемой компьютерной системой, так чтобы выполнялся один из способов, описанных в материалах настоящей заявки.
Вообще, варианты осуществления настоящего изобретения могут быть реализованы в виде компьютерного программного продукта с управляющей программой, управляющая программа является действующей для выполнения одного из способов, когда компьютерный программный продукт работает на компьютере. Управляющая программа, например, может храниться на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из способов, описанных в материалах настоящей заявки, хранимую на машиночитаемом носителе.
Поэтому, другими словами, вариант осуществления обладающего признаками изобретения способа является компьютерной программой, имеющей управляющую программу для выполнения одного из способов, описанных в материалах настоящей заявки, когда компьютерная программа работает на компьютере.
Поэтому, дополнительным вариантом осуществления обладающих признаками изобретения способов является носитель данных (или цифровой запоминающий носитель, или машинно-читаемый носитель), содержащий записанную на нем компьютерную программу для выполнения одного из способов, описанных в материалах настоящей заявки.
Поэтому, дополнительным вариантом осуществления обладающего признаками изобретения способа является поток данных или последовательность сигналов, представляющие собой компьютерную программу для выполнения одного из способов, описанных в материалах настоящей заявки. Поток данных или последовательность сигналов, например, могут быть выполнены с возможностью передаваться через соединение передачи данных, например, через сеть Интернет.
Дополнительный вариант осуществления содержит средство обработки, например, компьютер или программируемое логическое устройство, выполненные с возможностью или приспособленные для выполнения одного из способов, описанных в материалах настоящей заявки.
Дополнительный вариант осуществления содержит компьютер, имеющий установленную на нем компьютерную программу для выполнения одного из способов, описанных в материалах настоящей заявки.
В некоторых вариантах осуществления, программируемое логическое устройство (например, программируемая пользователем вентильная матрица) может использоваться для выполнения некоторых или всех из функциональных возможностей способов, описанных в материалах настоящей заявки. В некоторых вариантах осуществления, программируемая пользователем вентильная матрица может взаимодействовать с микропроцессором, для того чтобы выполнять один из способов, описанных в материалах настоящей заявки. Обычно, способы предпочтительно выполняются каким-нибудь аппаратным устройством.
Описанные выше варианты осуществления являются всего лишь иллюстративными применительно к принципам настоящего изобретения. Понятно, что модификации и варианты компоновок и деталей, описанных в материалах настоящей заявки, будут очевидны специалистам в данной области техники. Поэтому, замысел состоит в том, чтобы ограничиваться только объемом прилагаемой патентной формулы изобретения, а не конкретными деталями, представленными в качестве описания и пояснения вариантов осуществления, приведенных в материалах настоящей заявки.
Литература
[1] ʺ5G Automotive Vision,ʺ 5GPPP White Paper, Oct. 20, 2015.
[2] Heiko G. Seif, Xiaolong Hu, ʺAutonomous Driving in the iCity - HD Maps as a Key Challenge of the Automotive Industry,ʺ ELSEVIER, Engineering, pp. 159-162, June 2016.
[3] Philippe Gicquel, ʺAutonomous Vehicles Needs Realtime Dynamic Map Data,ʺ Geospatial World, Nov. 2015.
[4] ʺStudy on LTE Support for Vehicle to Everything (V2X) Services,ʺ 3GPP TR22. 885, V14.0.0, Dec. 2015.
[5] V Va. T. Shimizu, G. Bansal and R.W. Heath Jr,. ʺMillimeter Wave Vehicular Communications: A Survey,ʺ Foundations and Trends® in Networking, vol. 10, no. 1, pp. 1-113, June 2016.
[6] L Hobert, A. Festag, I. Llatser, L. Altomare, F. Visintainer, A. Kovacs, ʺEnhancements of V2X Communication in Support of Cooperative Autonomous Driving,ʺ IEEE Commun. Mag., vol. 53, no. 12, pp. 64-70, Dec 2015.
Способ сварки и конструктивный элемент
Силовой полупроводниковый модуль с боковыми стенками слоистой конструкции
Устройство, способ и компьютерная программа для обеспечения набора пространственных указателей на основе сигнала микрофона и устройство для обеспечения двухканального аудиосигнала и набора пространственных указателей
Способ получения прозрачного проводящего покрытия из оксида металла путем импульсного высокоионизирующего магнетронного распыления
Транспортное средство с отражателем звуковых волн
Устройство, способ и компьютерная программа для выработки широкополосного сигнала с использованием управляемого расширения ширины полосы и слепого расширения ширины полосы
Аудио или видео кодер, аудио или видео и относящиеся к ним способы для обработки многоканальных аудио или видеосигналов с использованием переменного направления предсказания
Поставщик транспортного потока, поставщик сигнала dab, анализатор транспортного потока, приемник dab, способ, компьютерная программа и сигнал транспортного потока
Способ и кодер и декодер для воспроизведения без промежутка аудио сигнала
Аудиокодек, поддерживающий режимы кодирования во временной области и в частотной области
Передача данных в системе беспроводной связи с уменьшенной задержкой
Передача сигнала данных в системе беспроводной связи с уменьшенной сквозной задержкой

