Результат интеллектуальной деятельности: АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ
Вид РИД
Изобретение
1. ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к измерительным системам, а в частности, к измерительным системам, в которых используется свет. Более конкретно, настоящее изобретение в целом относится к способу и устройству для радиолокационных систем, вырабатывающих измерительную информацию с использованием активных оптических (лидарных) систем.
2. УРОВЕНЬ ТЕХНИКИ
[002] Лидар относится к сенсорной технологии, обеспечивающей возможность измерения расстояния путем освещения цели лазером и анализа откликов, полученных в результате освещения цели. Слово "лидар" является словом-гибридом, составленным из двух слов "лазер" и "радар", а не аббревиатурой.
[003] Лидарные системы используют для решения многих задач. Например, лидарные системы могут быть использованы в сейсмологии, при создании облака точек, в картографии, при топографической съемке, формировании изображения, направлении перемещений и в других областях.
[004] При решении задач направления перемещений лидарная система может быть использована для обнаружения препятствий и недопущения столкновения с ними при направлении перемещений подвижной платформы в окружающей среде. Например, лидарной системой может быть создано облако точек окружающей среды, которое обеспечивает информацию для определения возможных мест нахождения препятствий. Подвижная платформа может представлять собой, например, робота, автомобиль, самостоятельно управляющий направлением своих перемещений, или транспортное средство какого-либо иного подходящего типа.
[005] Используемые в настоящее время лидарные системы обеспечивают создание определенной конфигурации или узора (pattern) в целевой области с использованием лазерного пучка, который имеет по существу равномерное расхождение в целевой области. Иными словами, лазерный пучок имеет одинаковый диаметр на одинаковых расстояниях от лидарной системы.
[006] Однако лидарные системы такого типа обеспечивают только одно разрешение во всей зоне сканирования. При этом целевая область может быть ограничена частотой импульсов и мощностью лидарной системы. Увеличение размера целевой области может приводить к меньшему разрешению. В результате, получение желаемого размера целевой области с желаемым разрешением может оказаться невозможным.
[007] Вследствие этого, желательно разработать способ и устройство, в которых учитывались бы по меньшей мере некоторые из проблем, описанных выше, а также другие возможные проблемы. Например, желательно разработать способ и устройство, которыми обеспечивается техническая возможность получения информации о целевой области с желаемым разрешением.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[008] Один вариант реализации настоящего изобретения обеспечивает создание устройства, содержащего источник света, сканирующую систему и фокусирующую систему. Источник света во время своей работы испускает лазерный пучок. Сканирующая система выполнена с возможностью направления лазерного пучка к целевой области и задания угла сканирования для лазерного пучка при сканировании целевой области. Фокусирующая система выполнена с возможностью задания расхождения лазерного пучка при сканировании целевой области. Изменение величины изменения угла сканирования и/или расхождения лазерного пучка при сканировании целевой области приводит к изменению разрешения в пределах целевой области.
[009] Еще один иллюстративный вариант реализации настоящего изобретения обеспечивает создание способа сканирования целевой области. Задают расхождение лазерного пучка, используемое во время сканирования целевой области. Лазерный пучок под углом сканирования направляют к различным участкам в целевой области. Угол сканирования лазерного пучка задают при направлении лазерного пучка к указанным различным участкам. Изменение расхождения и/или величины изменения угла сканирования во время сканирования целевой области приводит к изменению разрешения для целевой области.
[0010] Еще один иллюстративный вариант реализации настоящего изобретения обеспечивает создание измерительной системы, содержащей источник света, сканирующую систему и фокусирующую систему. Источник света выполнен с возможностью испускания пучка по существу когерентного света. Сканирующая система выполнена с возможностью направления пучка по существу когерентного света к целевой области и задания угла сканирования для пучка по существу когерентного света. Фокусирующая система выполнена с возможностью регулировки расхождения пучка по существу когерентного света при сканировании целевой области. Изменение величины изменения угла сканирования и/или расхождения пучка когерентного света при сканировании целевой области приводит к изменению разрешения в пределах целевой области.
[0011] Указанные признаки и функции могут быть реализованы независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы с получением других вариантов осуществления изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и преимущества будут лучше поняты из следующего подробного описания иллюстративного варианта реализации настоящего изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[0013] на ФИГ. 1 показана иллюстрация среды проведения измерений в соответствии с иллюстративным вариантом реализации изобретения;
[0014] на ФИГ. 2 показана иллюстрация блок-схемы среды проведения измерений в соответствии с иллюстративным вариантом реализации изобретения;
[0015] на ФИГ. 3 показана иллюстрация блок-схемы фокусирующей системы в соответствии с иллюстративным вариантом реализации изобретения;
[0016] на ФИГ. 4 показана иллюстрация блок-схемы сканирующей системы в соответствии с иллюстративным вариантом реализации изобретения;
[0017] на ФИГ. 5 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения;
[0018] на ФИГ. 6 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения;
[0019] на ФИГ. 7 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения;
[0020] на ФИГ. 8 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения;
[0021] на ФИГ. 9 показана иллюстрация структурной схемы процесса сканирования целевой области в соответствии с иллюстративным вариантом реализации изобретения;
[0022] на ФИГ. 10 показана иллюстрация структурной схемы процесса создания информации на основе сканирования целевой области в соответствии с иллюстративным вариантом реализации изобретения;
[0023] на ФИГ. 11 показана иллюстрация структурной схемы процесса работы платформы в соответствии с иллюстративным вариантом реализации изобретения;
[0024] на ФИГ. 12 показана иллюстрация структурной схемы процесса выбора компонентов измерительной системы в соответствии с иллюстративным вариантом реализации изобретения;
[0025] на ФИГ. 13 показана иллюстрация структурной схемы процесса выбора компонентов измерительной системы в соответствии с иллюстративным вариантом реализации изобретения; и
[0026] на ФИГ. 14 показана иллюстрация графика необходимого выходного угла в зависимости от входного угла для линзы в соответствии с иллюстративным вариантом реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0027] В различных иллюстративных вариантах реализации изобретения рассматривается и учитывается ряд различных соображений. Например, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что в некоторых сферах применения могут быть необходимы различные разрешения для различных участков целевой области, подвергаемой сканированию.
[0028] Например, при направлении перемещений автономной подвижной платформы, такой как робот, необходимо высокое разрешение на пути в направлении перемещения робота, однако для периферии вокруг пути приемлемо низкое разрешение. В результате, одна лидарная система может быть использована с высоким разрешением, а вторая лидарная система может быть использована с низким разрешением.
[0029] В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что разрешение требует использования более чем одной лидарной системы, и для них может использоваться больше энергии, выделяться больше ресурсов, и они могут быть более сложными, чем одна лидарная система. Например, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что при использовании автономного подвижного робота мощность может представлять собой ценный источник, который необходимо сохранять. Автономный подвижный робот может содержать источник питания в виде системы батарей. Использование системы батарей ограничивает количество энергии, которую можно использовать для обеспечения работы автономного подвижного робота. В результате, большее потребление энергии множеством лидарных систем или лидарной системой, выполненной с возможностью испускания большего количества импульсов в минуту, может приводить к сокращению времени работы автономного подвижного робота.
[0030] В иллюстративных вариантах реализации изобретения также рассматривается и учитывается, что может быть необходимым иметь лидарную систему, выполненную с возможностью обеспечения различных разрешений в целевой области без изменения частоты кадров. Частота кадров представляет собой множество сканов целевой области, которые могут быть выполнены в течение определенного периода времени. Например, частота кадров может составлять 30 кадров в секунду, 60 кадров в секунду или какое-либо иное значение.
[0031] Частота кадров может быть ограничена в лидарной системе тем, с какой скоростью лазер в лидарной системе может вырабатывать импульсы. По мере увеличения разрешения увеличивается количество сканируемых участков, что означает необходимость испускания большего количества импульсов в одну и ту же единицу времени для сканирования целевой области с одной и той же частотой кадров.
[0032] В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что использование меньших разрешений в некоторых областях и более высоких разрешений в других областях может обеспечить возможность сканирования целевой области с меньшим числом испусканий лазера по сравнению со сканированием целевой области только с высоким разрешением. Кроме того, в иллюстративных вариантах реализации изобретения также рассматривается и учитывается, что сканирование с одинаковым разрешением может иногда приводить к пропуску объектов в целевой области. Иными словами, одинаковое разрешение может приводить к появлению слепых пятен, если расхождение лазерного пучка приводит к появлению промежутков между участками покрытия лазером в целевой области. Следовательно, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что для сокращения слепых пятен может быть желательно иметь различные разрешения на различных участках целевой области.
[0033] Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства, в которых изменение угла сканирования и/или расхождение лазерного пучка могут быть изменены во время сканирования целевой области. Сканирование целевой области приводит к получению кадра.
[0034] При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или большего количества приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим. Иными словами, "по меньшей мере одно из следующего" означает, что любое сочетание объектов и их количество из этого списка может быть использовано, но не все из объектов списка должны присутствовать. Объект может представлять собой конкретный объект, вещь или категорию.
[0035] Например, помимо прочего, "по меньшей мере один объект из следующих: объект А, объект В или объект С" может включать в себя объект А, объект А и объект В или объект В. Этот пример также может включать в себя объект А, объект В и объект С или объект В и объект С. Конечно, может использоваться любая комбинация этих объектов. В некоторых иллюстративных примерах "по меньшей мере одно из" может означать, например, помимо прочего, два объекта А; один объект В и десять объектов С; четыре объекта В и семь объектов С или любые другие подходящие комбинации.
[0036] Иллюстративные варианты реализации обеспечивают создание способа и устройства, которые обеспечивают сканирование целевой области с различными разрешениями. Например, при одном и том же сканировании есть более высокое разрешение одного или более интересующих участков в пределах целевой области и меньшее разрешение других участков в целевой области. В одном иллюстративном примере измерительная система содержит источник когерентного света, сканирующую систему и фокусирующую систему.
[0037] Сканирующая система выполнена с возможностью направления лазерного пучка к целевой области и задания угла сканирования для лазерного пучка при сканировании целевой области. Фокусирующая система выполнена с возможностью задания расхождения лазерного пучка при сканировании целевой области. Изменение величины изменения угла сканирования и/или расхождения лазерного пучка при сканировании целевой области приводит к изменению разрешения в пределах целевой области.
[0038] Далее со ссылкой на фигуры чертежей, и в частности, на ФИГ. 1, показана иллюстрация среды проведения измерений в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере среда 100 проведения измерений включает в себя производственное помещение 102, в котором работает автономный подвижный робот 104. В этом иллюстративном примере автономный подвижный робот 104 перемещается вдоль пути 106. Путь 106 ограничен полосой 108 и полосой 110 на полу 112 в производственном помещении 102. Полоса 108 и полоса 110 могут быть выполнены с использованием краски, ленты или какого-либо другого материала, который может быть использован автономным подвижным роботом 104 для направления своего перемещения по производственному помещению 102.
[0039] Как показано на чертежах, автономный подвижный робот 104 содержит подвижную платформу 114, роботизированную руку 116, лидарную систему 118 и контроллер 120. Мобильная платформа 114 обеспечивает возможность перемещения автономного подвижного робота 104. Роботизированная рука 116 может быть использована для выполнения производственных операций в производственном помещении 102. Лидарная система 118 вырабатывает информацию об окружающей среде вокруг автономного подвижного робота 104. Контроллер 120 управляет работой автономного подвижного робота 104.
[0040] В этом иллюстративном примере лидарная система 118 сканирует целевую область 122. Как показано на чертежах, центральный участок 124 целевой области 122 находится непосредственно перед автономным подвижным роботом 104 и в направлении перемещения автономного подвижного робота 104. Периферийный участок 126 включает в себя область за пределами центрального участка 124. Центральный участок 124 имеет более высокое разрешение по сравнению с периферийным участком 126 целевой области 122.
[0041] Более высокое разрешение на центральном участке 124 обеспечивает контроллеру 120 возможность определения объекта 128, преграждающего путь 106. Меньшее разрешение в периферийном участке 126 является достаточным для обнаружения объекта, который может находиться не прямо перед автономным подвижным роботом 104. Таким образом, контроллер 120 может направлять перемещение автономного подвижного робота 104 вокруг препятствий, таких как объект 128, который может находиться на пути 106.
[0042] Со ссылкой на ФИГ. 2 показана иллюстрация блок-схемы среды проведения измерений в соответствии с иллюстративным вариантом реализации изобретения. Среда 100 проведения измерений представляет собой пример одного варианта реализации среды 200 проведения измерений, показанной в блочной форме на ФИГ. 2.
[0043] В этом иллюстративном примере среда 200 проведения измерений включает в себя измерительную систему 202. Как показано на чертежах, измерительная система 202 включает в себя источник 204 света, сканирующую систему 206, фокусирующую систему 208, датчик 210 и контроллер 212.
[0044] Источник 204 света выполнен с возможностью испускания пучка по существу когерентного света 214. В приведенном иллюстративном примере источник 204 света выполнен с возможностью испускания пучка по существу когерентного света 214 в виде лазерного пучка 216 во время работы источника 204 света.
[0045] В одном иллюстративном примере лазерный пучок 216 может иметь длину волны, выбранную от приблизительно 10 нм до приблизительно 700 нм. В зависимости от конкретной реализации могут быть использованы другие длины волн или диапазоны разрядных значений. Например, в некоторых вариантах реализации длина волны может составлять от приблизительно 250 нм до приблизительно 1000 нм.
[0046] Кроме того, источник 204 света испускает лазерный пучок 216 в виде непрерывного лазерного пучка или пульсирующего лазерного пучка. Если лазерный пучок 216 является непрерывным, его можно подвергнуть модулированию, например, он может представлять собой лазерный пучок непрерывного излучения с частотной модуляцией (FMCW).
[0047] Как показано на чертежах, сканирующая система 206 выполнена с возможностью направления лазерного пучка 216 к целевой области 218. В частности, сканирующая система 206 выполнена с возможностью направления лазерного пучка 216 к участкам 220 в целевой области 218.
[0048] Целевая область 218 представляет собой область, о которой необходимо получить информацию 222. Целевая область может иметь различные формы. Например, целевая область 218 может иметь форму, выбранную из следующего: круг, квадрат, прямоугольник, трапеция, овал, многоугольник, пятиугольник, шестиугольник, ромб, правильный многоугольник и неправильный многоугольник, нестандартная форма, неправильная форма или какая-либо иная подходящая форма.
[0049] Как показано на чертежах, сканирующая система 206 работает для задания угла 226 сканирования лазерного пучка 216 при сканировании целевой области 218. Угол 226 сканирования представляет собой угол лазерного пучка 216 в отношении опорного элемента, относительно которого измеряют угол лазерного пучка. Угол 226 сканирования лазерного пучка 216 измеряют от сканирующей системы 206 к целевой области 218.
[0050] Каждый участок в участках 220, которого достиг лазерный пучок 216, имеет угол сканирования относительно углов сканирования для других участков в участках 220. Угол 226 сканирования лазерного пучка 216 изменяют так, чтобы лазерный пучок 216 перемещался от одного участка к другому участку в участках 220.
[0051] Например, угол 226 сканирования может быть увеличен на единицу для перемещения лазерного пучка 216 от первого участка ко второму участку. Увеличение угла 226 сканирования на один градус является величиной изменения угла 226 сканирования.
[0052] Величина изменения угла 226 сканирования от одного участка к другому участку может измениться в результате изменения углового разрешения 228 для получения информации 222 о целевой области 218. Угловое разрешение 228 является мерой угла в отношении способности различать различные объекты. Например, угловое разрешение 228 представляет собой угол разделения, при котором две равнозначные цели могут быть отличены друг от друга на одном и том же расстоянии.
[0053] По мере увеличения величины изменения угла 226 сканирования происходит уменьшение углового разрешения 228. С уменьшением величины изменения угла 226 сканирования происходит увеличение углового разрешения 228.
[0054] Например, изменение угла 226 сканирования может увеличивать угол сканирования на 0,5 градуса. Изменение угла 226 сканирования может затем увеличивать угол сканирования на 1 градус. Изменение угла 226 сканирования на 1 градус приводит к меньшему угловому разрешению по сравнению с изменением угла 226 сканирования на 0,5 градуса.
[0055] В приведенном иллюстративном примере фокусирующая система 208 задает расхождение 230 лазерного пучка 216 при сканировании целевой области 218. Изменение расхождения 230 лазерного пучка 216 изменяет пространственное разрешение 232 информации 222. По мере увеличения расхождения 230 происходит уменьшение пространственного разрешения 232, а по мере уменьшения расхождения 230 происходит увеличение пространственного разрешения 232.
[0056] Пространственное разрешение 228 представляет собой величину детализирования и может быть выражено числом пикселей 233, которые могут присутствовать в информации 222 для целевой области 218. Величина может быть выражена в пикселях на линию, точках на дюйм или какой-либо иной величиной. Как показано на чертежах, расхождение 230 влияет на показатель пикселей на линию и точек на дюйм.
[0057] Датчик 210 выполнен с возможностью обнаружения откликов 234 на лазерный пучок 216, направляемый к участкам 220 в целевой области 218. Расстояния 236 до участков 220 в целевой области 218 определены с использованием откликов 234 и являются частью информации 222.
[0058] В этом иллюстративном примере контроллер 212 управляет работой компонентов измерительной системы 202, таких как источник 204 света, сканирующая система 206, фокусирующая система 208 и датчик 210. Например, контроллер 212 управляет сканирующей системой 206 и фокусирующей системой 208 для задания угла 226 сканирования и/или расхождения 230 лазерного пучка 216.
[0059] Как показано на чертежах, контроллер 212 сообщается с датчиком 210. Контроллер 212 определяет информацию 222 о целевой области 218 на основе откликов 234, обнаруживаемых датчиком 210.
[0060] Например, контроллер 212 может определять расстояния 236 до участков 220. Расстояния 236 до участков 220 в целевой области 218 также могут быть определены с использованием по меньшей мере одного метода, выбранного из метода времени пролета (TOS), интенсивности откликов 234 или на основе другой информации с использованием откликов 234.
[0061] Для создания изображения 238 могут быть использованы расстояния 236 от сканирования целевой области 218. Пиксели 233 в изображении 238 соответствуют участкам 220.
[0062] Как показано на чертежах, частота, с которой могут быть созданы изображения 238 на основе сканирования целевой области 218, измеряется в виде частоты кадров. Частота кадров может быть выражена количеством кадров в секунду (FPS).
[0063] Изменение величины изменения угла 226 сканирования или расхождения 230 во время сканирования целевой области 218 приводит к изменению разрешения 240 в целевой области 218. Разрешение 240 включает в себя угловое разрешение 228 и/или пространственное разрешение 232. Посредством изменения величины изменения угла 226 сканирования и/или углового разрешения 228 могут быть обеспечены различные разрешения целевой области 218. В результате, различные разрешения могут присутствовать на изображении 238.
[0064] В целевой области 218 могут быть выбраны высокое и низкое разрешения для поддержания необходимой частоты кадров, если частота, с которой происходит испускание лазерного пучка 216, ограничивает частоту кадров для целевой области 218. Например, источник 204 света может быть выполнен с возможностью испускания не более 1000 импульсов в секунду. С такой частотой испускания источник 204 света может охватывать 1000 участков на скане целевой области 218 с частотой кадров 1 кадр в секунду.
[0065] Если 1000 участков целевой области 218 не являются достаточными для необходимого покрытия с выбранным расхождением и при данной величине изменения угла 226 сканирования, к участкам 220 могут быть добавлены дополнительные участки. Добавление к участкам 220, однако, сокращает частоту кадров.
[0066] С помощью измерительной системы 202 сканирующая система 206 управляет углом 226 сканирования лазерного пучка 216 и фокусирующей системой 208 для изменения величины изменения угла 226 сканирования и/или расхождения 230 лазерного пучка 216 при сканировании целевой области 218. Изменение величины изменения угла 226 сканирования и/или расхождения 230 лазерного пучка 216 при сканировании целевой области 218 приводит к изменению разрешения 240. Как показано на чертежах, разрешение 240 включает в себя угловое разрешение 228 и/или пространственное разрешение 232.
[0067] Изменение разрешения 240 во время сканирования целевой области 218 может обеспечить возможность направления лазерного пучка 216 к участкам 220 без увеличения количества участков 220. Указанное изменение может также обеспечить возможность сканирования участков 220 без сокращения частоты кадров.
[0068] Контроллер 212 может быть реализован в программном обеспечении, аппаратных средствах, программно-аппаратных средствах или их комбинации. Когда используется программное обеспечение, операции, выполняемые контроллером 212, могут быть реализованы в программном коде, выполненном с возможностью запуска на аппаратных средствах, таких как процессорный блок. Когда используются программно-аппаратные средства, операции, выполняемые контроллером 212, могут быть реализованы в программном коде и данных и сохранены в постоянной памяти для запуска в процессорном блоке. Когда используются аппаратные средства, аппаратные средства могут включать в себя схемы, которые работают для выполнения указанных операций в контроллере 212.
[0069] В приведенных иллюстративных примерах аппаратные средства могут быть выполнены в виде системы замыкания, интегральной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или аппаратных средств какого-либо другого соответствующего типа, выполненных для выполнения множества операций. С программируемым логическим устройством, рассматриваемое устройство может быть выполнено с возможностью выполнения указанного множества операций. Конфигурация рассматриваемого устройства может быть изменена позднее, или оно может иметь постоянную конфигурацию для выполнения указанного множества операций. Программируемые логические устройства включают в себя, например, программируемый логический блок, программируемую матричную логическую схему, логическую матрицу с эксплуатационным программированием, программируемую пользователем вентильную матрицу и другие соответствующие аппаратные устройства. Кроме того, процессы могут быть реализованы в органических компонентах, встроенных в неорганические компоненты, и могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем в органических полупроводниках.
[0070] Таким образом, измерительная система 202 работает как активная оптическая (лидарная) система с переменным разрешением. В приведенном иллюстративном примере измерительная система 202 может быть связана с платформой 242. Когда один компонент "связан" еще с одним компонентом, эта связь является физической связью. Например, первый компонент, измерительная система 202, может считаться физически связанной со вторым компонентом, платформой 242, посредством по меньшей мере одного из следующего: прикрепление ко второму компоненту, установление связи со вторым компонентом, установка на втором компоненте, приваривание ко второму компоненту, скрепление со вторым компонентом или соединение со вторым компонентом каким-либо иным подходящим способом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Кроме того, первый компонент также может считаться физически связанным со вторым компонентом при выполнении в виде части второго компонента, удлинении второго компонента или с использованием обоих указанных способов.
[0071] Как показано на чертежах, платформа 242 может иметь различные формы. Например, платформа 242 может быть выбрана из следующих объектов: подвижная платформа, неподвижная платформа, конструкция наземного базирования, конструкция водного базирования, конструкция космического базирования, автономный подвижный робот, транспортное средство, самоуправляемый автомобиль, летательный аппарат, беспилотное воздушное транспортное средство, надводный корабль, танк, транспортное средство для перевозки личного состава, космический летательный аппарат, космическая станция, портативное устройство, носимое устройство, спутник или какие-либо иные подходящие платформы.
[0072] Когда платформа 242 является подвижным роботом, целевая область 218 может находиться в направлении перемещения подвижного робота. Как показано на чертежах, контроллер 212 также может управлять работой платформы 242. Информация 222 может быть использована контроллером 212 для управления перемещением подвижного робота для достижения участка назначения при недопущении столкновений с препятствиями.
[0073] В другом примере целевая область 218 может находиться в месте размещения заготовки. Информация 222 может быть использована подвижным роботом для выполнения производственных операций на заготовке, таких как сверление отверстия, нанесение герметика, установка крепежа или каких-либо других подходящих операций.
[0074] Еще в одном примере платформа 242 может представлять собой самоуправляемый автомобиль, а целевая область 218 может представлять собой дорогу перед самоуправляемым автомобилем. Информация 222 может быть использована для обнаружения препятствий, таких как другие автомобили на дороге и участках выездов, знаки и другие объекты на обочине дороги. С учетом информации 222 о расстоянии, самоуправляемый автомобиль может управлять перемещением к точке назначения, сохранять свое положение на полосе дороги или выполнять какую-либо другую операцию.
[0075] Таким образом, приведенный иллюстративный пример обеспечивает одно или более технических решений для технической проблемы путем получения информации о целевой области с необходимым разрешением. Посредством изменения разрешения в пределах целевой области может быть получено более высокое разрешение для одного или более интересующих участков в целевой области. Меньшие разрешения могут быть использованы для других участков в целевой области. В результате, технический результат одного или более технических решений заключается в возможности поддержания частоты, с которой может быть выполнено сканирование целевой области, когда источник света ограничивает частоту, с которой вся целевая область сканируется с более высоким разрешением.
[0076] Далее со ссылкой на ФИГ. 3 показана иллюстрация блок-схемы фокусирующей системы в соответствии с иллюстративным вариантом реализации изобретения. В приведенных иллюстративных примерах одинаковые ссылочные номера могут быть использованы более чем на одной фигуре чертежей. Такое повторное использование ссылочных номеров на различных чертежах представляет один и тот же элемент на разных фигурах чертежей. В приведенном иллюстративном примере фокусирующая система 208 может иметь ряд различных конфигураций.
[0077] Например, фокусирующая система 208 может быть образована первой линзой 300 и второй линзой 302, выровненными на оптической оси 304. Первая линза 300 и вторая линза 302 образует систему линз с переменным фокусом. Оптическая ось 304 проходит по центру через первую линзу 300 и вторую линзу 302.
[0078] Как показано на чертежах, вторая линза 302 выполнена с возможностью перемещения по оптической оси 304 относительно первой линзы 300. В этом показанном примере вторая линза 302 выбрана из следующих объектов: собирающая линза и рассеивающая линза.
[0079] Лазерный пучок 216 проходит через первую линзу 300 вдоль оптической оси 304. Далее, лазерный пучок 216 проходит через вторую линзу 302 после прохождения через первую линзу 300. Расхождение 230 лазерного пучка 216 изменяют посредством перемещения второй линзы 302 вдоль оптической оси 304 относительно первой линзы 300.
[0080] В другом иллюстративном примере фокусирующая система 208 может включать в себя рассеивающую линзу 306 в дополнение к первой линзе 300 и второй линзе 302 или вместо них. Как показано на чертежах, рассеивающая линза 306 характеризуется различными уровнями расхождения 308 в своих различных частях 310.
[0081] Расхождение 230 лазерного пучка 216 для участка в целевой области 218 задают на основании того, какую часть из указанных различных частей 310 проходит лазерный пучок 216, проходящий через рассеивающую линзу 306. Например, сканирующая система 206 выполнена с возможностью направления лазерного пучка 216 к различным частям 310 рассеивающей линзы 306 таким образом, что расхождение 230 лазерного пучка 216 изменяется в дополнение к направлению лазерного пучка 216 к участкам 220 в целевой области 218 по ФИГ. 2. Иными словами, лазерный пучок 216 может проходить через различные участки 310 рассеивающей линзы 306 таким образом, что расхождение 230 лазерного пучка 216 изменяется на основании того, какую часть рассеивающей линзы 306 проходит лазерный пучок 216.
[0082] Рассеивающая линза 306 может быть выполнена с использованием линз различных типов. Например, рассеивающая линза 306 может быть выбрана из следующих объектов: сферическая линза, цилиндрическая линза и асферическая линза или линза какого-либо другого подходящего типа.
[0083] Со ссылкой на ФИГ. 4 показана иллюстрация блок-схемы сканирующей системы в соответствии с иллюстративным вариантом реализации изобретения. В приведенном иллюстративном примере сканирующая система 206 может иметь ряд различных конфигураций.
[0084] В одном иллюстративном примере сканирующая система 206 содержит множество зеркал 400, выполненных с возможностью перемещения вокруг множества осей 402. При использовании в настоящем документе выражение "множество" в отношении объектов обозначает один или более объектов. Например, множество зеркал 400 представляет собой одно или более зеркал 400.
[0085] В одном иллюстративном примере множество зеркал 400 может быть зеркалом 404, которое выполнено с возможностью поворота вокруг первой оси 406 и второй оси 408. Таким образом, лазерный пучок 216 может быть направлен для сканирования участков 220 в целевой области 218.
[0086] В другом иллюстративном примере зеркало 404 представляет собой первое зеркало 410, а сканирующая система 206 включает в себя второе зеркало 412. Первое зеркало 410 выполнено с возможностью поворота вокруг первой оси 406, а второе зеркало выполнено с возможностью поворота вокруг второй оси 408.
[0087] Еще в одном иллюстративном примере сканирующая система 206 включает в себя призму 414 Дове. Призма 414 Дове может быть использована вместо второго зеркала 412 и выполнена с возможностью поворота вокруг второй оси 408 для направления лазерного пучка 216.
[0088] Иллюстрация среды 200 проведения измерений и различных компонентов по ФИГ. 2-4 не означает наложения физических или архитектурных ограничений на способ, которым может быть осуществлен иллюстративный вариант реализации. Могут быть использованы другие компоненты в дополнение или вместо проиллюстрированных. Некоторые компоненты могут быть необязательными. Также, блоки показаны в целях иллюстрации некоторых функциональных компонентов. При осуществлении иллюстративного варианта реализации один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на другие блоки.
[0089] Например, измерительная система 202 также может включать в себя источник питания или соединение с источником питания. В качестве еще одного примера показан контроллер 212 в виде компонента, отдельного от измерительной системы 202.
[0090] В некоторых иллюстративных примерах контроллер 212 может быть частью измерительной системы 202. Кроме того, контроллер 212 может быть размещен с распределением более чем на одном физическом участке. Например, первая часть контроллера 212 может быть размещена в измерительной системе 202 и может управлять измерительной системой 202, а вторая часть контроллера 212 может быть размещена вне измерительной системы 202 и платформы 242. Например, вторая часть контроллера 212 может быть связана с платформой 242 или находиться в удаленном относительно измерительной системы 202 и платформы 242 участке.
[0091] В качестве еще одного примера фокусирующая система 208 по ФИГ. 3 также может включать в себя двигательную или приводную систему для перемещения второй линзы 302 вдоль оптической оси 304. Кроме того, сканирующая система 206, как показано на чертеже по ФИГ. 4, также может включать в себя двигательную систему, выполненную с возможностью поворота первого зеркала 410, второго зеркала 412 и призмы 418 Дове.
[0092] Со ссылкой на ФИГ. 5 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере измерительная система 500 представляет собой пример реализации измерительной системы 202, показанной в блочной форме на ФИГ. 2.
[0093] Как показано на чертежах, измерительная система 500 включает в себя лазер 502, фокусирующую систему 504, сканирующую систему 506 и датчик 508. Лазер 502 является примером источника 204 света; фокусирующая система 504 является примером фокусирующей системы 208; сканирующая система 506 является примером сканирующей системы 206; а датчик 508 является примером датчика 210.
[0094] В этом иллюстративном примере фокусирующая система 504 включает в себя первую линзу 510 и вторую линзу 512. Первая линза 510 и вторая линза 512 размещены на оптической оси 514. Как показано на чертежах, первая линза 510 закреплена, а вторая линза 512 выполнена с возможностью перемещения вдоль оптической оси 514 в направлении стрелки 515.
[0095] Как показано на чертежах, сканирующая система 506 включает в себя сканирующее зеркало 516. В этом иллюстративном примере сканирующее зеркало 516 выполнено с возможностью поворота вокруг двух осей.
[0096] Датчик 508 включает в себя ряд различных компонентов. Как показано на чертежах, датчик 508 включает в себя зеркало 518, прозрачное с одной стороны, и блок 520 фотодатчика.
[0097] Во время работы лазер 502 испускает лазерный пучок 522 импульсами. Импульсы лазерного пучка 522 перемещаются через зеркало 518, прозрачное с одной стороны, а затем через первую линзу 510 и вторую линзу 512 по траектории 519. Вторая линза 512 может быть перемещена для изменения расхождения лазерного пучка 522.
[0098] После этого лазерный пучок 522 достигает сканирующего зеркала 516. Сканирующее зеркало 516 выполнено с возможностью поворота для направления лазерного пучка 522 к целевой области 524 по траектории 519. Как показано на чертежах, целевая область 524 имеет прямоугольную форму. Различные участки в участках 526 в целевой области 524 достигаются лазерным пучком 522 посредством изменения угла сканирования лазерного пучка 522 посредством поворота сканирующего зеркала 516.
[0099] Лазер 502 управляется с временным регулированием импульсов таким образом, что каждый импульс лазерного пучка 522 достигает отличающегося участка из участков 526. Изменение угла сканирования лазерного пучка 522 приводит к изменению траектории 519, чтобы достигать различных участков из участков 526 во время сканирования целевой области 524.
[00100] В этом иллюстративном примере участки 526 и целевая область 524 сканируются лазерным пучком 522 с откликами (не показано), возвращающимися к сканирующему зеркалу 516 и направляемыми через первую линзу 510 и вторую линзу 512 к зеркалу 518, выполненному прозрачным с одной стороны, вдоль траектории 519. Зеркало 518, выполненное прозрачным с одной стороны, направляет отклик в блок 520 фотодатчика.
[00101] Как показано на чертежах, для получения информации о расстоянии вокруг целевой области 524 может быть выполнено одно сканирование целевой области 524. Кроме того, величина или размер изменения в градусах между каждым участком может быть изменен(а) сканирующим зеркалом 516 во время сканирования целевой области 524.
[00102] Указанное изменение может быть использовано для изменения углового разрешения, которое изменяет траекторию 519, ведущую к целевой области 524. Информация от одного сканирования целевой области 524 может быть использована для формирования изображения, которое представляет собой один кадр из одного сканирования целевой области 524.
[00103] Кроме того, расхождение лазерного луча 522 может быть изменено во время сканирования целевой области 524. Указанное изменение может быть задано посредством перемещения второй линзы 512 относительно первой линзы 510. Изменение расхождения лазерного пучка 522 изменяет диаметр лазерного пучка 502 на конкретном расстоянии от фокусирующей системы 504. Изменение расхождения изменяет пространственное разрешение. В приведенном здесь иллюстративном примере изменение угла сканирования и/или расхождение лазерного пучка 522 задают таким образом, что изменение числа градусов для угла сканирования от одного участка к другому участку в участках 526 в целевой области 524 приблизительно равно числу градусов для расхождения.
[00104] Как показано на чертежах, каждый участок в участках 526 в целевой области 524 показывает диаметр пучка на конкретном расстоянии от измерительной системы 500. Диаметр пучка задают расхождением лазерного пучка 522 под управлением фокусирующей системы 504. Как показано в этом примере, когда величина изменения угла сканирования увеличивается, расхождение лазерного пучка 522 также увеличивается таким образом, что диаметр лазерного пучка 522 также увеличивается. Иными словами, изменение расхождения основано на изменении угла сканирования.
[00105] Таким образом, диаметром лазерного пучка 522 можно управлять для покрытия целевой области 524 так, чтобы уменьшить вероятность размещения объекта между диаметрами пучков в слепой зоне в целевой области 524. Разрешение для участков 526 в целевой области 524 может быть изменено в одном и том же сканировании целевой области 524.
[00106] Как показано на чертежах, участки 526 в целевой области 524 имеют наибольшую плотность сканирования в части 528 в целевой области 524. Иными словами, плотность участков 526 является наибольшей, а диаметр лазерного пучка 522 в этой части является наименьшим. Участок 528 имеет самое высокое разрешение в целевой области 524. Величина изменения угла сканирования и расхождение лазерного пучка 522 являются наименьшими для участков 526 в части 528 по сравнению с другими частями целевой области 524.
[00107] Участки 526 в части 530 и части 532 имеют следующую наименьшую величину изменения угла сканирования и следующую наименьшую величину рассеивания лазерного пучка 522. Плотность участков 526 в части 530 и части 532 меньше, чем части 528. Кроме того, разрешение части 530 и части 532 ниже, чем части 528.
[00108] В этом иллюстративном примере участки 526 в части 534 и части 536 имеют большее изменение угла сканирования и большее расхождение по сравнению с участками 526 в части 530 и части 532. Часть 534 и часть 536 имеют меньшее разрешение, чем часть 530 и часть 532.
[00109] Как показано на чертежах, участки 526 в части 538 и части 540 имеют наибольшее изменение угла сканирования и наибольшее расхождение лазерного пучка 522. В результате, часть 538 и часть 540 имеют самое низкое разрешение в целевой области 524.
[00110] Таким образом, отклики на лазерный пучок 522 от участков 526 могут обеспечивать необходимый уровень покрытия в целевой области 524 с использованием меньшего числа участков 526 по сравнению с выполнением сканирования с использованием угла сканирования и рассеивания, показанных в части 528. Иными словами, использованием меньшего числа испусканий лазерного пучка 522 может быть достигнуто по существу покрытие целевой области 524 по сравнению с использованием большего числа испусканий лазерного пучка 522, когда плотность участков 526 является такой же, как в части 528, по всей целевой области 524.
[00111] Посредством использования более высокой плотности сканирования по всей целевой области 524 может быть получена информация высокого разрешения. Однако может иметь место меньшая частота кадров в зависимости от скорости, с которой лазер 502 может испускать импульсы лазерного пучка 522.
[00112] Посредством использования меньшей плотности сканирования с большим расхождением лазерного пучка 522 в областях за пределами части 528, целевая область 524 может быть покрыта необходимым образом с сокращением числа испусканий лазерного пучка 522 лазером 502, необходимого для сканирования целевой области 524. В результате, можно избежать сокращения частоты кадров по сравнению с поддержанием более высокого разрешения по всей целевой области 524.
[00113] Части в целевой области 524, для которых необходимы для более высокое и меньшее разрешения, могут быть выбраны на основании конкретной причины сканирования целевой области 524. Например, при сканировании горизонта земли на предмет обнаружения объектов, часть 528 может находиться на горизонте. Более высокое разрешение может обеспечить возможность как обнаружения, так и определения объектов. Меньшие разрешения на большем удалении от части 528 могут распознать наличие объектов или их перемещение без определения того, какие объекты находятся в целевой области 524. В качестве еще одного примера участок в целевой области 524, выбранный для высокого разрешения, может представлять собой дорогу или путь.
[00114] Со ссылкой на ФИГ. 6 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере измерительная система 500 представляет собой еще один пример реализации измерительной системы 202, показанной в блочной форме на ФИГ. 2.
[00115] В этом примере сканирующая система 504 также включает в себя линзу 600. Как показано на чертежах, линзу 600 используют в этом иллюстративном примере для увеличения или уменьшения отклонения лазерного пучка 522 сканирующим зеркалом 516.
[00116] В этом примере лазерный пучок 522 направляют к участкам 602 в целевой области 603. Как показано на чертежах, целевая область 603 имеет круглую форму в отличие от прямоугольной формы целевой области 524 по ФИГ. 5. В этом примере плотность сканирования уменьшается на удалении от центра 604 целевой области 603.
[00117] Как показано на чертежах, часть 605 имеет наибольшую плотность сканирования с наибольшей плотностью участков 602. Изменение угла сканирования и отклонения лазерного пучка 522 является наименьшим в части 605. Эта часть имеет самое высокое разрешение в целевой области 603.
[00118] Часть 606 имеет меньшую плотность участков 602 по сравнению с частью 605. Разрешение этой части является следующим наибольшим в целевой области 603. Часть 608 имеет меньшую плотность участков 602 по сравнению с частью 606. Иными словами, изменение угла сканирования и расхождения больше по сравнению с частью 606.
[00119] Часть 610 имеет меньшую плотность сканирования, чем часть 608. Разрешение в части 610 ниже, чем в части 608. Часть 610 имеет наименьшую плотность сканирования и наименьшую плотность участков 602 в целевой области 603.
[00120] Со ссылкой на ФИГ. 7 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере измерительная система 500 представляет собой еще один пример реализации измерительной системы 202, показанной в блочной форме на ФИГ. 2.
[00121] В этом примере сканирующая система 504 также включает в себя призму 700 Дове. Призма 700 Дове выполнена с возможностью поворота вокруг одной оси. Как показано на чертежах, сканирующее зеркало 516 выполнено с возможностью поворота вокруг одной оси вместо двух осей. В этом иллюстративном примере призма 700 Дове выполнена с возможностью поворота по разным осям от сканирующего зеркала 516.
[00122] Поворот призмы 700 Дове обусловливает испускание лазерного пучка 522 с круговой конфигурацией в целевой области 603. Изменение поворота сканирующего зеркала 516 приводит к изменению угла сканирования лазерного пучка 522 в радиальном направлении от центра 604 в целевой области 603.
[00123] Со ссылкой на ФИГ. 8 показана иллюстрация измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере измерительная система 500 представляет собой еще один пример реализации измерительной системы 202, показанной в блочной форме на ФИГ. 2.
[00124] В этом иллюстративном примере линза 800 и рассеивающая линза 802 являются частью сканирующей системы 506. Линза 800 и рассеивающая линза 802 также являются частью фокусирующей системы 504.
[00125] Сканирующее зеркало 516 выполнено с возможностью поворота по двум осям для направления лазерного пучка 522 через различные участки рассеивающей линзы 802. Рассеивающая линза 802 характеризуется различными уровнями расхождения в своих различных частях.
[00126] В результате, расхождение лазерного пучка 522 может быть задано на основе конкретной части, через которую проходит лазерный пучок 522, проходящий через рассеивающую линзу 802. Кроме того, эти различные части рассеивающей линзы 802 также отклоняют лазерный пучок 522 для направления лазерного пучка 522 к одному из участков 602 в целевой области 603.
[00127] Таким образом, различная плотность сканирования, как показано для участков 602 в целевой области 603, получена на основе упомянутой конкретной части, через которую проходит лазерный пучок 522, проходящий через рассеивающую линзу 802. Например, центр рассеивающей линзы 802 имеет меньшее расхождение по сравнению с периферией рассеивающей линзы 802.
[00128] В качестве примеров реализации показаны иллюстрации различных конфигураций измерительной системы 500 по ФИГ. 5-8, измерительной системы 202, показанной в блочной форме на ФИГ. 2, и они не означают ограничения способа, которым измерительная система 500 может быть реализована в других примерах. Например, в других примерах измерительной системы 500 линза 800 может не использоваться. В других иллюстративных примерах, целевые области могут иметь другие формы, отличные от прямоугольной формы целевой области 524 и круглой формы целевой области 603. Форма целевой области может быть, например, неправильной формой, четырехугольником, пятиугольником или иметь какую-либо иную подходящую форму.
[00129] Кроме того, могут быть использованы другие конфигурации участков для различных разрешений в дополнение или вместо показанных для одной из целевой области 524 и целевой области 603. Например, целевая область может иметь два отдельных участка, на которых изменения угла сканирования и рассеивания лазерного пучка 522 являются наименьшими. Например, два несмежных участка с самым высоким разрешением могут присутствовать в целевой области.
[00130] Еще в одном иллюстративном примере форма, размер и участки с выбранными разрешениями могут изменять от одного сканирования к другому сканированию. Например, самое высокое разрешение может быть в центре округлой целевой области. Если перемещение объекта определено на периферии целевой области, изменения угла сканирования и расхождения могут быть такими, что наименьшее изменение угла сканирования и расхождения находятся на периферии, где обнаружено перемещение объекта.
[00131] Таким образом, разрешения могут изменяться динамически от одного сканирования целевой области к другому. Кроме того, сама целевая область также может быть изменена, чтобы иметь по меньшей мере отличающуюся форму или отличающуюся размер.
[00132] Со ссылкой на ФИГ. 9 показана иллюстрация структурной схемы процесса сканирования целевой области в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 9, может быть реализован в среде 200 проведения измерений по ФИГ. 2. Например, процесс может быть реализован в измерительной системе 202 для сканирования целевой области 218 по ФИГ. 2.
[00133] Процесс начинают с задания расхождения лазерного пучка во время сканирования целевой области (операция 900). Задание расхождения при выполнении операции 900 может включать в себя отсутствие расхождения, положительное расхождение или отрицательное расхождение. Таким образом, диаметром лазерного пучка можно управлять при достижении лазерным пучком целевой области. В этом иллюстративном примере целевая область может быть областью, находящейся на выбранном расстоянии от измерительной системы.
[00134] Согласно процессу направляют лазерный луч к различным участкам в целевой области под углом сканирования (операция 902). Согласно процессу задают угол сканирования лазерного пучка, выполняемого при направлении лазерного пучка к указанным различным участкам (операция 904). При выполнении операции 904 угол сканирования изменяют для каждого импульса лазерного пучка.
[00135] Изменение величины изменения угла сканирования и/или расхождения во время сканирования целевой области приводит к изменению разрешения для целевой области. Величину изменения угла сканирования и расхождения задают таким образом, что расхождение основано на величине изменения угла сканирования, или величина изменения угла сканирования основана на расхождении. В приведенном иллюстративном примере величина изменения угла сканирования и/или расхождение задают таким образом, что изменение числа градусов для угла сканирования приблизительно равно числу градусов для расхождения.
[00136] В этом иллюстративном примере операция 900, операция 902 и операция 904 или операция 906 не указывают какой-либо конкретный порядок. Эти операции могут быть выполнены по существу в одно и то же время. Кроме того, некоторые из этих операций могут быть выполнены по существу в одно и то же время, до или после другой операции или в каком-либо другом порядке.
[00137] Согласно процессу выполняют обнаружение откликов на лазерный пучок, направляемый к указанным различным участкам в целевой области (операция 906), после чего процесс завершают. Эти операции приводят к получению одного сканирования целевой области. Различные операции могут быть повторены для выполнения дополнительного сканирования целевой области.
[00138] Отклики, обнаруживаемые при выполнении операции 906, могут быть использованы для выполнения множества операций. Это множество операций выбрано по меньшей мере из одной из следующих операций: создание изображения целевой области, определение расстояний до объектов в целевой области, определение объектов в целевой области, управление перемещением платформы, перемещение объекта, манипулирование объектом, обнаруженным в целевой области, или какие-либо другие подходящие операции.
[00139] Со ссылкой на ФИГ. 10 показана иллюстрация структурной схемы процесса создания информации на основе сканирования целевой области в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 10, может быть реализован в среде 200 проведения измерений. Например, различные операции могут быть выполнены в контроллере 212. В других иллюстративных примерах компьютер или иная система обработки данных может получать информацию от измерительной системы и обрабатывать указанную информацию.
[00140] Процесс начинают сканированием целевой области (операция 1000). Операция 1000 может быть выполнена с использованием различных операций, описанных на ФИГ. 9, создания информации о целевой области. В этом иллюстративном примере операцию 1000 выполняют для создания информации, которая может быть использована в изображении целевой области.
[00141] Согласно процессу затем определяют расстояния до участков в целевой области исходя из откликов, принятых датчиком в измерительной системе (операция 1002). При выполнении операции 1002 согласно процессу может быть выполнено определение времени пролета (TOF) исходя из времени приема отклика, прошедшего после испускания лазерного луча, приведшего к появлению отклика. Кроме того, для определения расстояния также может быть использована интенсивность отклика. Эти расстояния являются информацией о целевой области, полученной на основе откликов.
[00142] Затем согласно процессу создают одно изображение для множества изображений с использованием информации о расстоянии (операция 1004) с последующим возвратом процесса к операции 1000. При выполнении операции 1004 каждое определенное расстояние формирует пиксели, которые соответствуют участку в целевой области. Изображение может иметь различные разрешения на различных участках изображения. Указанное изображение также считается информацией, созданной на основе откликов.
[00143] Со ссылкой на ФИГ. 11 показана иллюстрация структурной схемы процесса обеспечения работы платформы в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 11, может быть реализован в среде 200 проведения измерений. Например, процесс может быть реализован в платформе 242 с использованием измерительной системы 202. Контроллер 212 может также управлять работой платформы 242 и может выполнять различные операции, показанные на этой структурной схеме. В других иллюстративных примерах эти операции могут быть выполнены отдельным контроллером или устройством иного типа, используемым для управления работой платформы.
[00144] Процесс начинают с определения множества объектов в изображениях целевой области (операция 1100). Затем согласно процессу управляют работой платформы на основе определения множества объектов в изображении и расстояний до этого множества объектов (операция 1102), после чего процесс завершают.
[00145] Например, если платформа выполнена в виде подвижного робота в производственном помещении, операции могут представлять собой направление перемещений робота к месту назначения, сверление отверстия в заготовке, установку крепежа, осмотр детали или какие-либо другие подходящие операции. В качестве еще одного примера, если платформа является самоуправляемым автомобилем, операции могут быть направлены на поддержание расстояния до другого автомобиля, перестроение в другую полосу движения или какие-либо другие подходящие операции.
[00146] Со ссылкой на ФИГ. 12 показана иллюстрация структурной схемы процесса выбора компонентов измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 12, может быть использован для определения параметров компонентов в сканирующей системе 206 и фокусирующей системе 208 по ФИГ. 2-А. Например, указанный процесс может быть использован для определения параметров при использовании в фокусирующей системе 208 сферической линзы. В частности, этот процесс может быть использован с фокусирующей системой 208, содержащей первую линзу 300 и вторую линзу 302, реализованные с использованием сферических линз.
[00147] Процесс начинают с определения двумерной угловой конфигурации, необходимой для обеспечения выдачи выходных сигналов измерительной системы (операция 1200). Эта двумерная угловая конфигурация является конфигурацией или узором из участков на плоскости в целевой области. Например, конфигурация из участков 526 и целевой области 524 по ФИГ. 5 и конфигурация из участков 602 в целевой области 603 по ФИГ. 6 являются примерами двумерных угловых конфигураций.
[00148] Затем для каждого участка в целевой области согласно процессу определяют траекторию от плоскости в целевой области обратно к сканирующему зеркалу (операция 1202). Траектория также может включать в себя любые оптические элементы, такие как линзы, которые могут находиться между указанным участком в целевой области и сканирующим зеркалом. В одном иллюстративном примере сканирующее зеркало является первым элементом для отклонения лазерного пучка по одной оси или по двум осям. Линзы, через которые лазерный пучок проходит к сканирующему зеркалу, изменяют расхождение лазерного пучка, однако не используются для отклонения лазерного пучка в приведенном иллюстративном примере. Отклонение управляет лазерным пучком в необходимом направлении.
[00149] Для отклонения лазерного пучка от оптической оси также может быть использована поворотная призма Дове. Указанное отклонение может быть выполнено, например, посредством наклона призмы Дове или посредством отклонения пучка с использованием сканирующего зеркала перед тем, как лазерный пучок достигнет призмы Дове. Сканирующее зеркало и призма Дове могут быть выполнены с возможностью поворота таким образом, что для сканирования необходима только одна ось поворота.
[00150] Затем согласно процессу определяют угол сканирования необходимый для того, чтобы лазерный пучок достиг каждого из участков на плоскости в целевой области (операция 1204). Затем согласно процессу определяют положение сканирующего зеркала для каждого из углов сканирования, необходимых для указанных участков на плоскости в целевой области (операция 1206).
[00151] Согласно процессу, определяют расхождение лазерного пучка, необходимое для получения желаемого диаметра каждого из участков на целевой плоскости в целевой области (операция 1208). При выполнении операции 1208 определяют изменения значения расхождения лазерного пучка, которое может быть необходимо для получения желаемых диаметров. Затем согласно процессу определяют настройки для системы линз с переменным фокусом, чтобы получить желаемое расхождение для желаемого диаметра в каждом из участков (операция 1210), после чего процесс завершают.
[00152] Согласно данному процессу определяют параметры углов сканирования и расхождения. Эти параметры далее могут быть использованы для обеспечения работы измерительной системы 202 по ФИГ. 2, чтобы получить необходимую конфигурацию участков 220 в целевой области 218. Конфигурация также включает в себя необходимый диаметр лазерного пучка, достигающего плоскости в целевой области 218. Например, эти параметры могут быть использованы для управления перемещением линзы, такой как вторая линза 302, и фокусирующей системы 208, показанной в блочной форме на ФИГ. 3.
[00153] Со ссылкой на ФИГ. 13, показана иллюстрация структурной схемы процесса выбора компонентов измерительной системы в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 13, может быть использован для определения параметров компонентов в сканирующей системе 206 и фокусирующей системе 208 по ФИГ. 2-4. Этот процесс также может быть использован для определения параметров, когда используется произвольная линза. Произвольная линза может быть использована, когда необходима более сложная или некруговая конфигурация.
[00154] Процесс начинают с определения необходимого выходного угла сканирования для каждого входного угла, создаваемого сканирующим зеркалом (операция 1300). Необходимый выходной угол сканирования является углом, используемым для направления лазерного пучка к участку в целевой области.
[00155] Затем согласно процессу определяют "локальный наклон" поверхности линзы, необходимый для получения желаемого угла выходного сканирования (операция 1302). "Локальный наклон" представляет собой угол между центральным лучом оптического пучка и касательной поверхностью оптического элемента в 'локальной' точке, в которой луч выходит из оптического элемента. Операция 1302 может быть выполнена с использованием известных в настоящее время методов трассировки лучей, таких как закон Снеллиуса.
[00156] Согласно процессу для определения двух поверхностей линзы используют способы сшивки поверхности (операция 1304). Указанные две поверхности являются поверхностями на каждой стороне линзы. Такими способами сшивки поверхности могут быть, например, поверхностями приближения на основе бикубических сплайнов.
[00157] Согласно процессу, определяют расхождение лазерного пучка, выводимого линзой для каждого участка в целевой области (операция 1306). Согласно процессу, определяют расхождение лазерного пучка, необходимое для получения желаемого диаметра каждого из участков на целевой плоскости в целевой области (операция 1308).
[00158] Затем согласно процессу определяют настройки для системы линз с переменным фокусом, чтобы получить необходимое расхождение для желаемого диаметра в каждом из участков на основании сравнения значения расхождения, получаемого исходя из конструкции линзы, с необходимым расхождением (операция 1310), после чего процесс завершают. Эти параметры могут быть использованы для задания перемещения линзы, такой как вторая линза 302, и фокусирующей системы 208, показанной в блочной форме на ФИГ. 3.
[00159] Структурные схемы и блок-схемы в различных изображенных вариантах реализации изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном варианте реализации изобретения. В этой связи, каждый блок в структурных схемах или блок-схемах может представлять по меньшей мере один объект из группы, включающий: модуль, сегмент, функцию и/или часть операции или этапа. Например, один или более блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах они могут, например, принимать форму интегральных схем, которые изготовлены или выполнены с возможностью осуществления одной или более операций в структурных схемах или блок-схемах. При реализации в виде комбинации программного кода и аппаратных средств реализация может принимать форму программно-аппаратных средств.
[00160] В некоторых альтернативных реализациях иллюстративного варианта изобретения, функция или функции, описанные в блоках, могут иметь место не в том порядке, который показан на фигурах чертежей. Например, в некоторых случаях, два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от используемой функциональности. Также, другие блоки могут быть добавлены в дополнение к блокам, показанным в структурной схеме или блок-схеме.
[00161] Со ссылкой на ФИГ. 14 показана иллюстрация графика необходимого выходного угла в зависимости от входного угла для линзы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере на графике 1400 ось X 1402 представляет угол входа лазерного пучка в линзу, измеряемый в градусах, а ось Y 1404 представляет угол входа лазерного пучка из линзы, измеряемый в градусах. Угол входа лазерного пучка является углом сканирования лазерного пучка.
[00162] Линия 1406 обозначает разделение между рассеивающей линзой и собирающей линзой. Часть 1408 относится к рассеивающей линзе, часть 1410 относится к собирающей линзе, часть 1412 относится к рассеивающей линзе, а часть 1414 относится к собирающей линзе. Обозначение "собирающая линза" или "рассеивающая линза" относится к типу линзы, необходимому для конкретного входящего лазерного пучка и выходящего лазерного пучка. Конфигурация линзы может быть такой, что расхождение пучка увеличивается по мере увеличения угла пучка относительно оптической оси. В этом иллюстративном примере описанная линза может в целом обозначать оптический телескоп, а линзы выбраны для получения этого результата. Конфигурация лазерного сканирования, разнесение между импульсами, могут быть выбраны таким образом, что разнесение соответствует изменяющемуся расхождению пучка.
[00163] При расчете формы линзы могут быть использованы существующие в настоящее время стандартные программы трассировки лучей для создания поверхности линзы. Такой программой может быть, например, программа Code V ®, которая доступна от компании Synopsis, Inc. Программа "Code V" является зарегистрированным товарным знаком компании Synopsis, Inc. Программа Zemax Optical Studio, доступная от компании Zemax, LLC, является еще одним примером программы трассировки лучей, которая может быть использована. Входными данными могут быть углы от места расположения источника, место размещения оптического элемента и выходной угол, необходимый для каждого входного угла. Кроме того, форма поверхности линзы также может быть вычислена исходя из основных оптических принципов с использованием анализа ABCD матрицы или закона Снеллиуса.
[00164] Как показано на чертежах, линия 1416 представляет конфигурацию сканирования, основанного на угле входа лазерного пучка и угле выхода лазерного пучка. Линия 1416 обозначает тип линзы, который необходим и необходимый угол выхода.
[00165] Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для получения информации о целевой области. В одном иллюстративном примере пучок когерентного света в форме лазерного пучка может быть направлен к различным участкам в целевой области для выполнения сканирования целевой области.
[00166] Отклики на сканирование могут быть использованы, чтобы получить информацию о целевой области. Например, расстояния двух различных участков могут быть использованы для определения наличия объектов в целевой области. Наличие различных объектов может быть использовано для управления работой платформы, такой как подвижный робот, находящийся в производственном помещении, самоуправляемый автомобиль, беспилотное летательное транспортное средство, наблюдающее за наземной территорией, или другие платформы.
[00167] Посредством изменения величины изменения угла сканирования и/или расхождения лазера могут быть получены различные разрешения для целевой области. Сканированием целевой области с различными разрешениями обеспечивается возможность поддержания частоты кадров по сравнению с существующими лидарными системами, в которых вся целевая область сканируется с более высоким разрешением. Кроме того, с различными разрешениями, может быть сокращено количество информации, которая должна быть обработана. В результате могут быть ускорены создание изображений, определение объектов и другие типы обработки информации.
[00168] Различные иллюстративные примеры описывают компоненты, которые выполняют действия или операции. В иллюстративном варианте реализации изобретения, компонент может быть выполнен с возможностью осуществления описанных операции или действия. Например, компонент может иметь конфигурацию или конструкцию, подходящую для структуры, которая обеспечивает возможность выполнения указанным компонентом действия или операции, описанной как выполненная посредством указанного компонента в приведенных иллюстративных примерах.
[00169] Описание различных иллюстративных вариантов реализации изобретения было представлено в целях иллюстрации и это описание не является исчерпывающим или ограничивающимся раскрытыми формами реализации настоящего изобретения. Многие модификации и изменения будут очевидны специалистам в данной области техники.
Кроме того, настоящее раскрытие содержит варианты реализации изобретения согласно следующим пунктам:
Пункт 1. Устройство, содержащее:
источник света, выполненный с возможностью испускания лазерного пучка во время своей работы;
сканирующую систему, выполненную с возможностью направления лазерного пучка к целевой области и задания угла сканирования для лазерного пучка при сканировании целевой области; и
фокусирующую систему, выполненную с возможностью задания расхождения лазерного пучка при сканировании целевой области, причем изменение величины изменения угла сканирования и/или расхождения лазерного пучка при сканировании целевой области приводит к изменению разрешения в пределах целевой области.
Пункт 2. Устройство по пункту 1, в котором величина изменения угла сканирования и расхождение заданы таким образом, что расхождение основано на величине изменения угла сканирования или величина изменения угла сканирования основана на расхождении.
Пункт 3. Устройство по пунктам 1 или 2, в котором обеспечена возможность задания величины изменения угла сканирования и/или расхождения таким образом, что изменение числа градусов для угла сканирования от одного участка к другому участку в целевой области приблизительно равно числу градусов для расхождения.
Пункт 4. Устройство по пунктам 1, 2 или 3, в котором сканирующая система выполнена с возможностью направления лазерного пучка к участкам в целевой области, а также содержит:
датчик, выполненный с возможностью обнаружения откликов на лазерный пучок, направляемый к указанным участкам в целевой области, причем расстояния до участков в целевой области определены с использованием откликов.
Пункт 5. Устройство по пунктам 1, 2, 3 или 4, в котором фокусирующая система содержит:
первую линзу, расположенную на оптической оси, при этом лазерный пучок проходит через первую линзу вдоль оптической оси; и
вторую линзу, выполненную с возможностью перемещения по оптической оси, при этом лазерный пучок проходит через вторую линзу после прохождения через первую линзу, а расхождение лазерного пучка, направляемого к целевой области, изменено перемещением второй линзы вдоль оптической оси.
Пункт 6. Устройство по пункту 5, в котором вторая линза выбрана из следующих объектов: собирающая линза и рассеивающая линза.
Пункт 7. Устройство по пунктам 1, 2, 3, 4, 5 или 6, в котором фокусирующая система содержит:
рассеивающую линзу, характеризующуюся различными уровнями расхождения для своих различных частей, причем
расхождение лазерного пучка, достигающего участка в целевой области, задано на основании того, какую часть из указанных различных частей проходит лазерный пучок, проходящий через рассеивающую линзу.
Пункт 8. Устройство по пункту 7, в котором сканирующая система выполнена с возможностью направления лазерного пучка к указанным различным частям рассеивающей линзы.
Пункт 9. Устройство по пунктам 1, 2, 3, 4, 5, 6, 7 или 8, в котором сканирующая система содержит:
множество зеркал, выполненных с возможностью перемещения вокруг множества осей.
Пункт 10. Устройство по пунктам 1, 2, 3, 4, 5, 6, 7, 8 или 9, в котором сканирующая система содержит:
призму Дове, выполненную с возможностью поворота вокруг оси.
Пункт 11. Устройство по пунктам 1, 2, 3, 4, 5, 6, 7, 8, 9 или 10, в котором лазерный пучок имеет длину волны, выбранную из диапазона от примерно 10 нм до примерно 700 нм.
Пункт 12. Устройство по пунктам 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 или 11, в котором источник света, сканирующая система и фокусирующая система образуют измерительную систему и которое также содержит:
платформу, причем измерительная система связана с платформой, выбранной из следующих объектов: подвижная платформа, неподвижная платформа, конструкция наземного базирования, конструкция водного базирования, конструкция космического базирования, подвижный робот, транспортное средство, самоуправляемый автомобиль, летательный аппарат, беспилотное воздушное транспортное средство, надводный корабль, танк, транспортное средство для перевозки личного состава, космический летательный аппарат, космическая станция, портативное устройство, носимое устройство и спутник.
Пункт 13. Способ сканирования целевой области, включающий:
задание расхождения лазерного пучка во время сканирования целевой области;
направление лазерного пучка к различным участкам в целевой области под углом сканирования и
задание угла сканирования лазерного пучка при направлении лазерного пучка к указанным различным участкам, причем
изменение расхождения и/или величины изменения угла сканирования во время сканирования целевой области приводит к изменению разрешения для целевой области.
Пункт 14. Способ по пункту 13, также включающий:
обнаружение откликов на лазерный пучок, направляемый к указанным различным участкам в целевой области.
Пункт 15. Способ по пункту 14, согласно которому отклики используют для выполнения множества операций, выбранных по меньшей мере из одной из следующих операций: создание изображения целевой области, определение расстояний до объектов в целевой области, определение объектов в целевой области или управление перемещением платформы.
Пункт 16. Способ по пунктам 13, 14 или 15, согласно которому задание расхождения лазера во время сканирования целевой области включает:
отправку лазерного пучка вдоль оптической оси через первую линзу и затем через вторую линзу, расположенную на этой оптической оси; и
перемещение второй линзы вдоль оптической оси таким образом, что изменяется расхождение лазерного пучка, направляемого к целевой области.
Пункт 17. Способ по пунктам 13, 14, 15 или 16, согласно которому
задание расхождения лазера во время сканирования целевой области включает:
направление лазерного пучка через различные части рассеивающей линзы таким образом, что расхождение лазерного пучка изменяется на основании того, какую часть рассеивающей линзы проходит лазерный пучок.
Пункт 18. Способ по пунктам 16 или 17, согласно которому рассеивающая линза выбрана из следующих объектов: сферическая, цилиндрическая линза и асферическая линза.
Пункт 19. Способ по пунктам 13, 14, 15, 16, 17 или 18, согласно которому направляют свет к целевой области сканирующей системой, содержащей множество зеркал, выполненных с возможностью перемещения вокруг множества осей, и/или призму Дове.
Пункт 20. Способ по пунктам 13, 14, 15, 16, 17, 18 или 19, согласно которому лазерный пучок имеет длину волны, выбранную из диапазона от примерно 10 нм до примерно 700 нм.
Пункт 21. Измерительная система, содержащая:
источник света, выполненный с возможностью испускания пучка по существу когерентного света;
сканирующую систему, выполненную с возможностью направления пучка по существу когерентного света к целевой области и задания угла сканирования для пучка по существу когерентного света; и
фокусирующую систему, выполненную с возможностью регулировки расхождения пучка по существу когерентного света при сканировании целевой области, причем изменение величины изменения угла сканирования и/или расхождения пучка когерентного света при сканировании целевой области приводит к изменению разрешения в пределах целевой области.
Пункт 22. Измерительная система по пункту 21, также содержащая:
датчик, выполненный с возможностью обнаружения откликов на пучок по существу когерентного света, направляемого к участку в целевой области, причем расстояния до участков в целевой области определены с использованием откликов.
Пункт 23. Измерительная система по пунктам 21 или 22, в которой угол сканирования и/или расхождение заданы таким образом, что изменение числа градусов для угла сканирования от одного участка к другому участку в целевой области приблизительно равно числу градусов для расхождения.
Пункт 24. Измерительная система по пунктам 22 или 23, также содержащая:
контроллер, выполненный с возможностью определения расстояния до указанных участков в целевой области с использованием откликов и выполнения множества операций, выбранных по меньшей мере из одной из следующих операций: создание изображения целевой области, определение расстояний до объектов в целевой области, определение объектов в целевой области или направление перемещения платформы относительно целевой области.
Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации изобретения. Вариант или варианты реализации изобретения выбраны и описаны для того, чтобы лучше объяснить принципы его осуществления, практического применения и дать представление специалистам о различных вариантах с различными модификациями, которые подходят для конкретного использования изобретения другими специалистам в данной области техники.
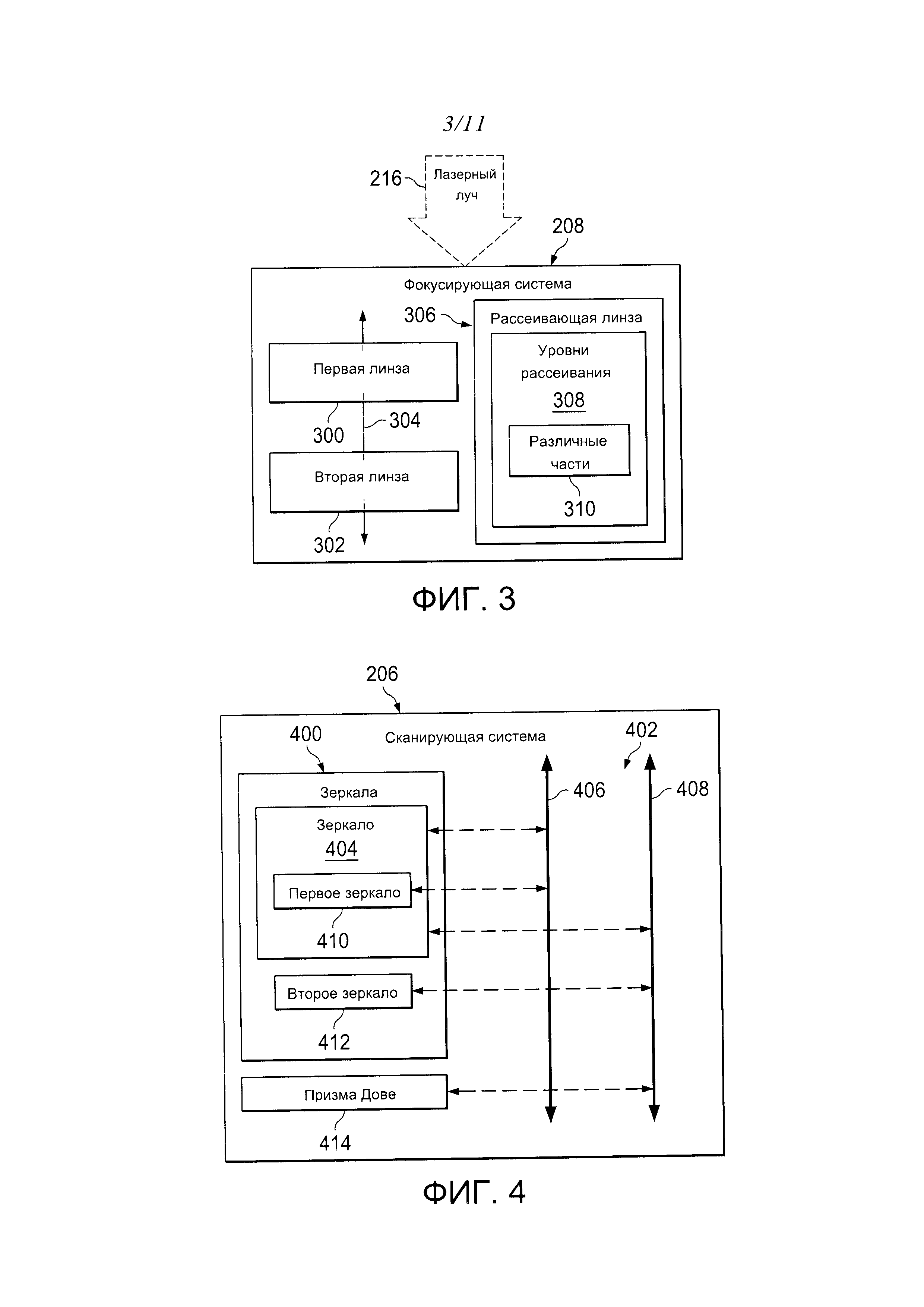
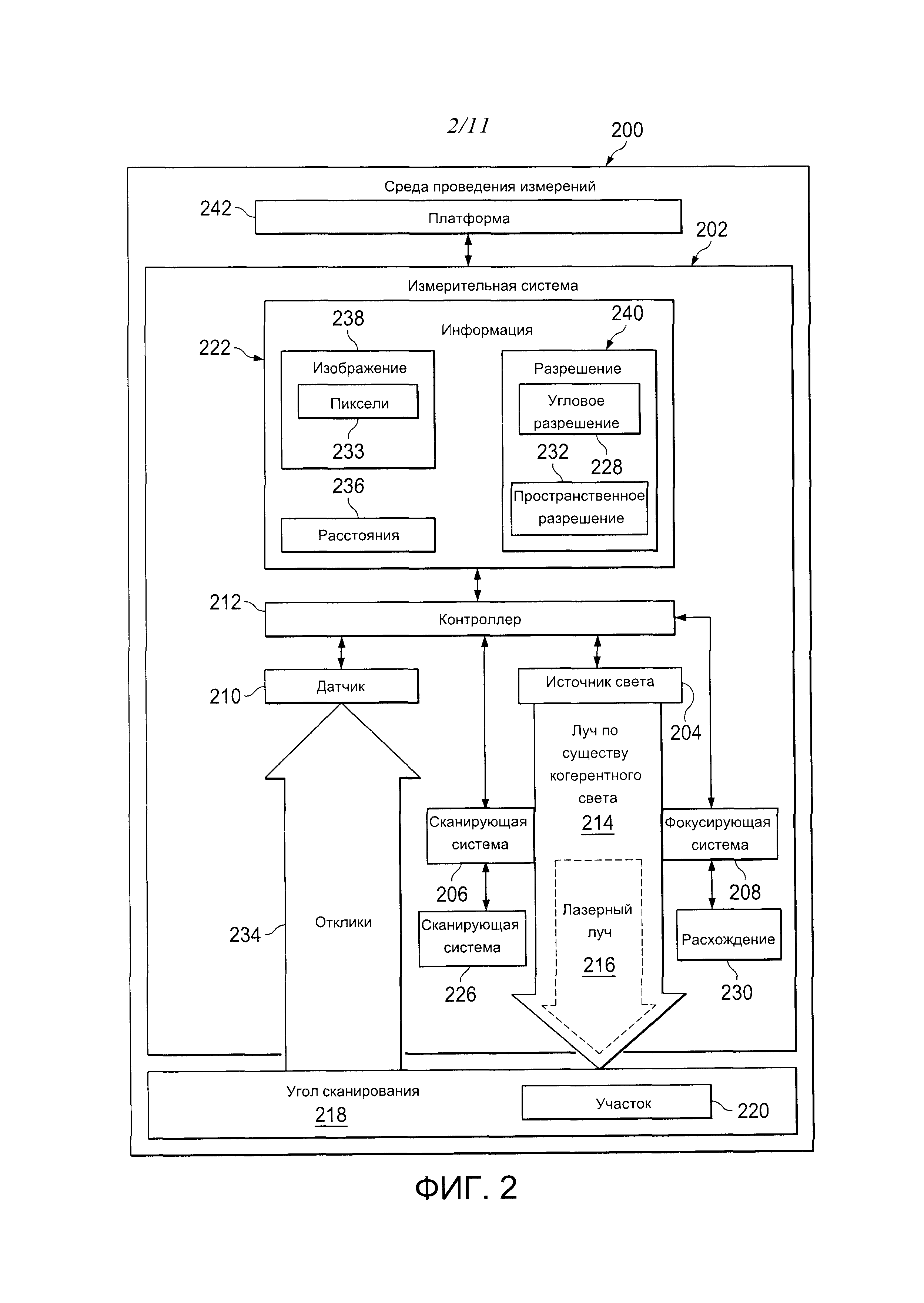
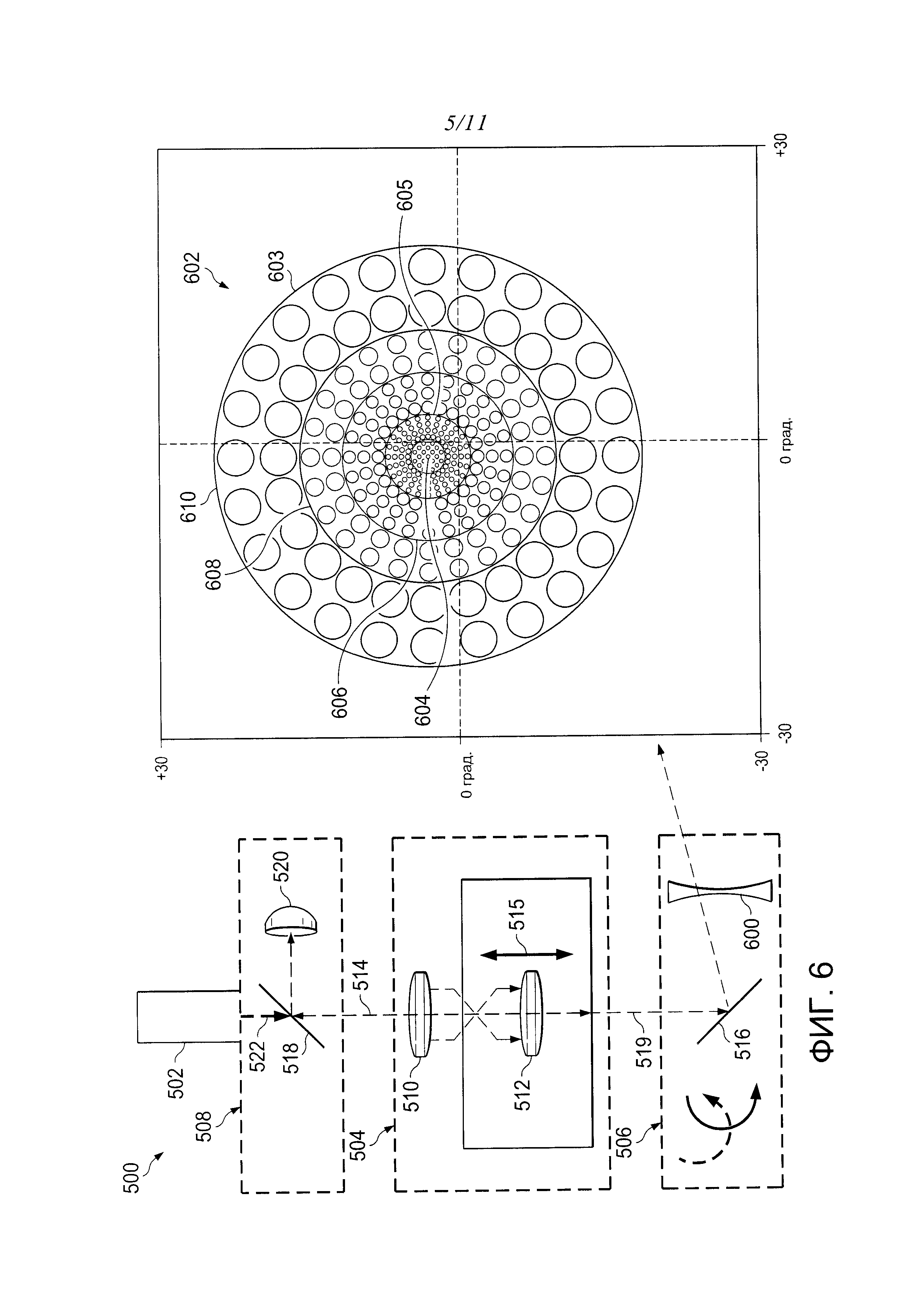
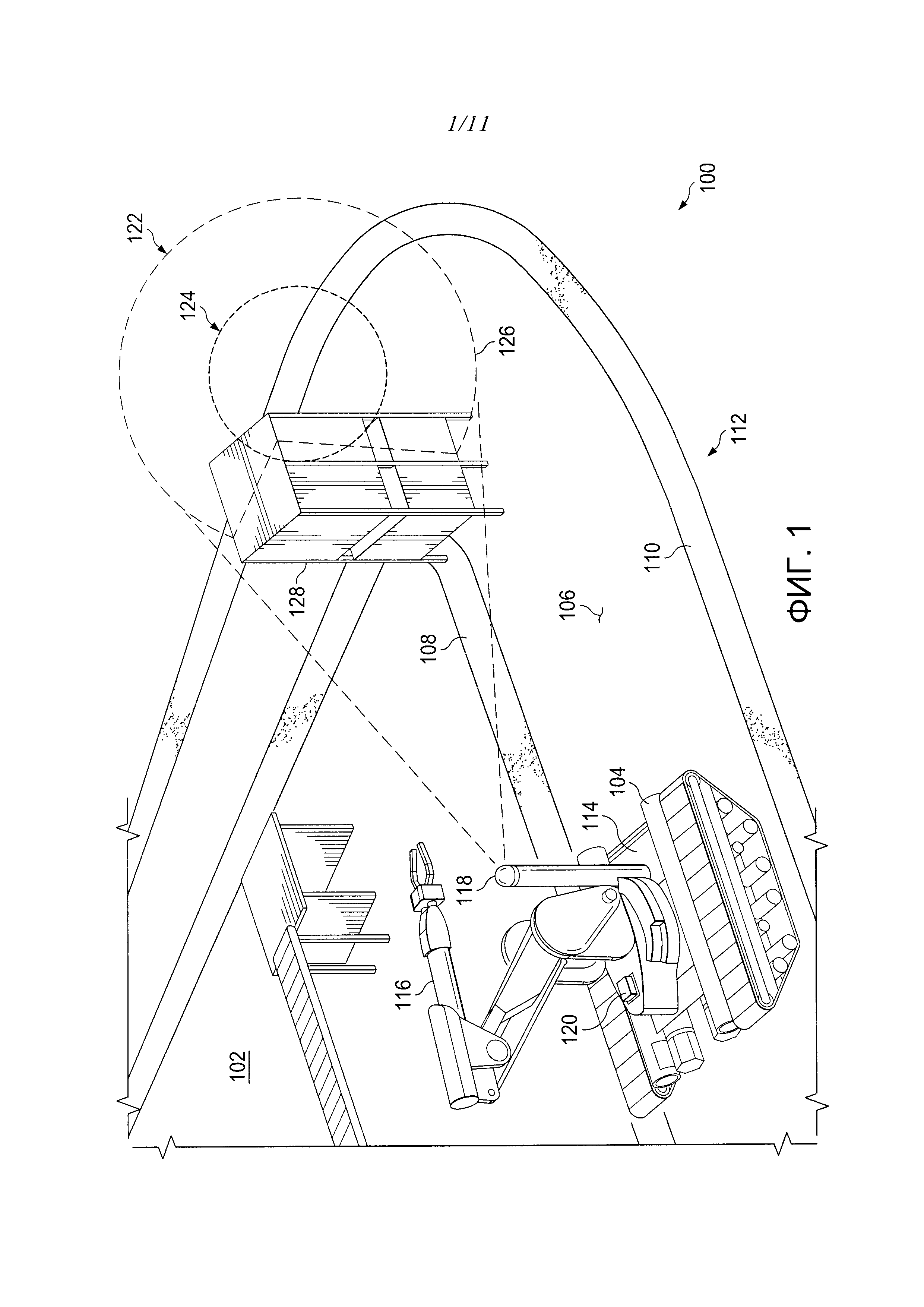
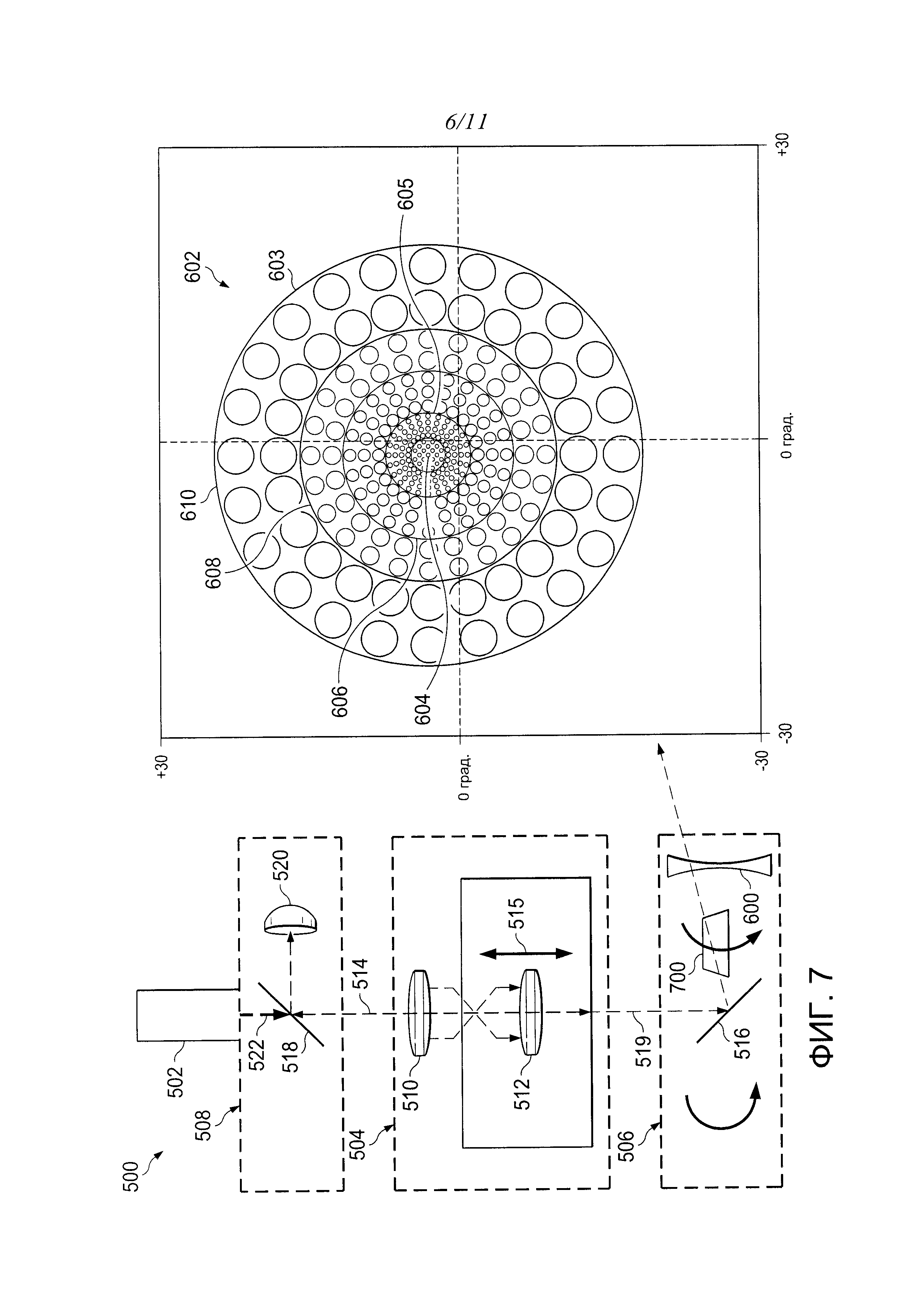
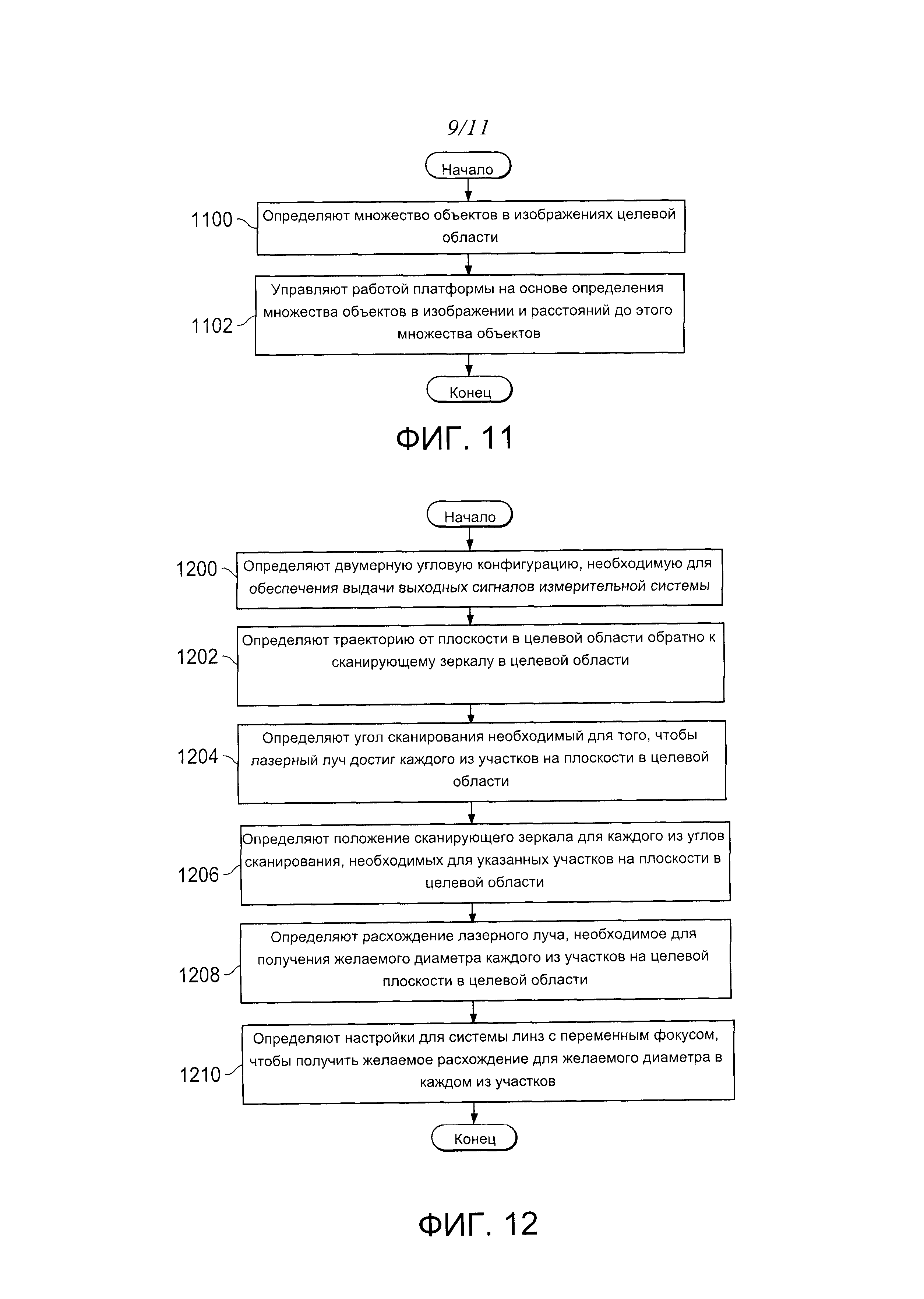
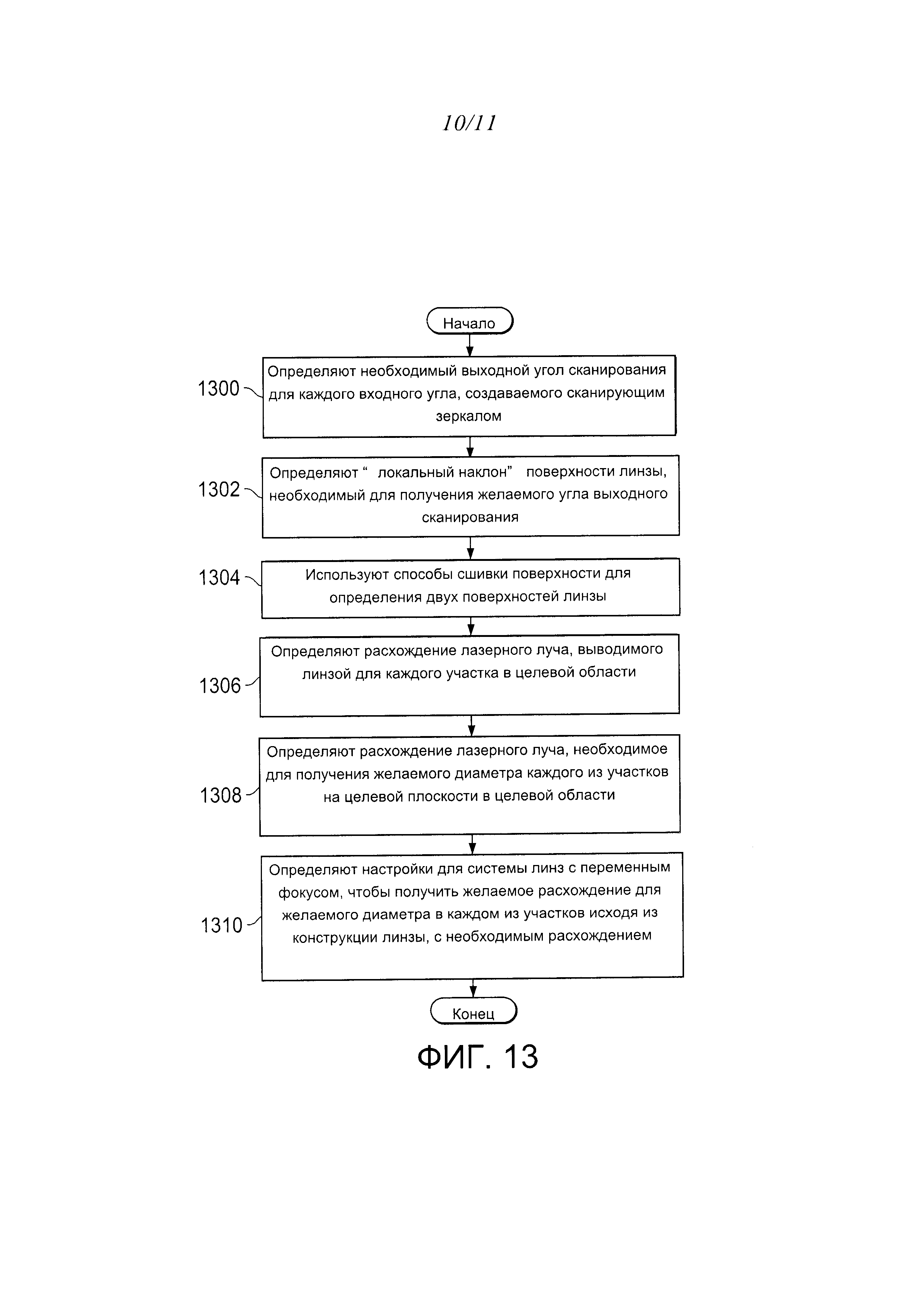
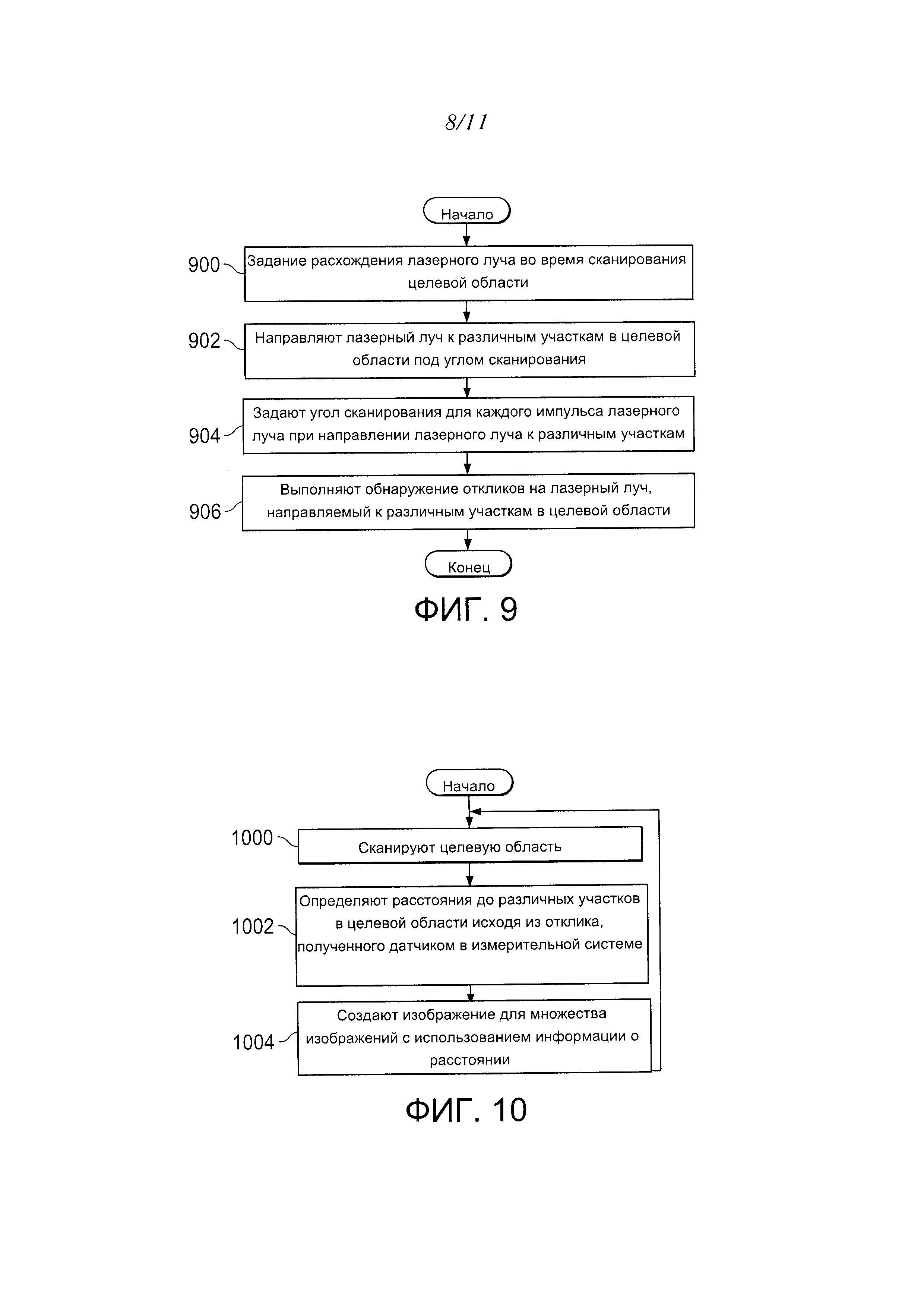
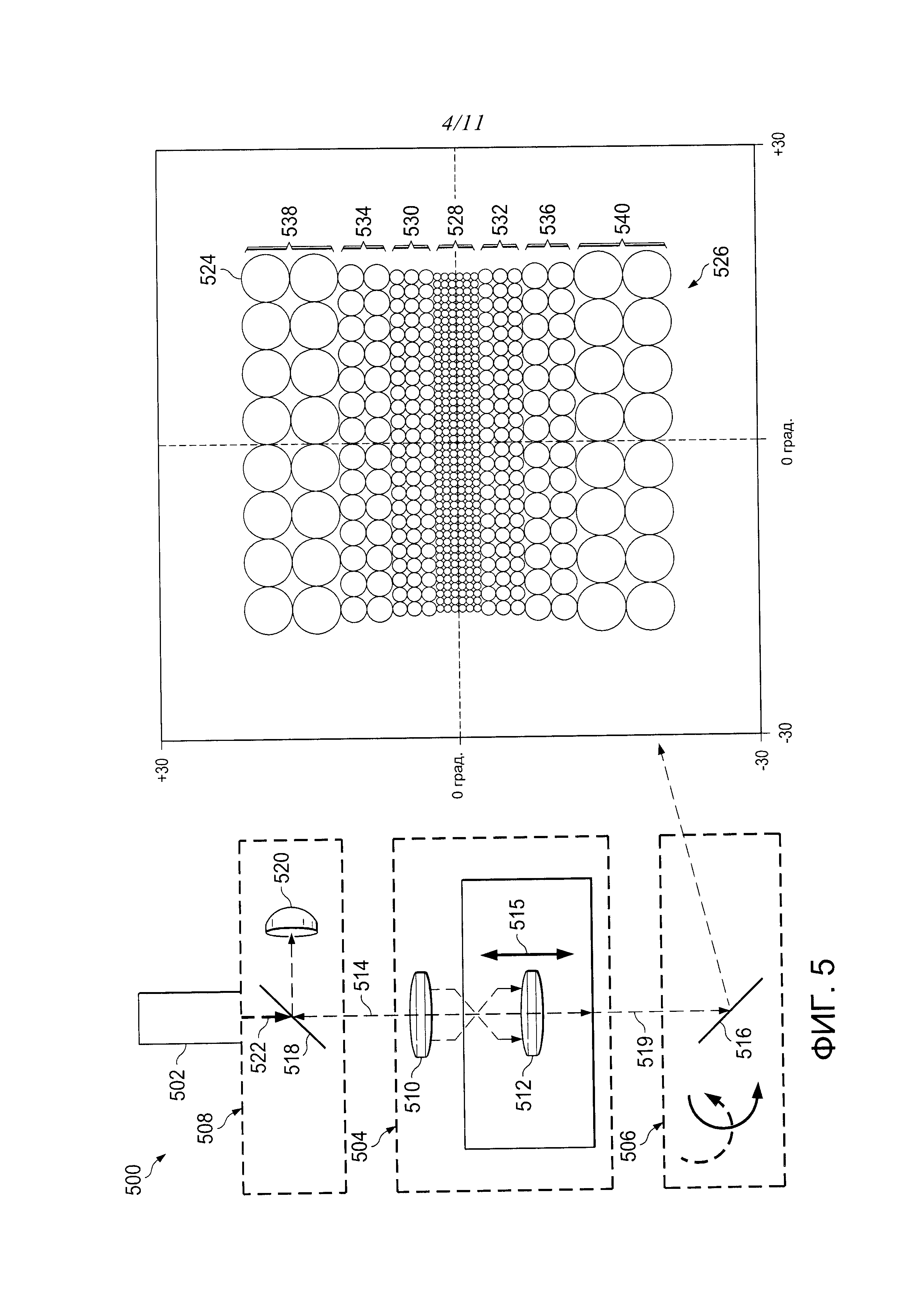
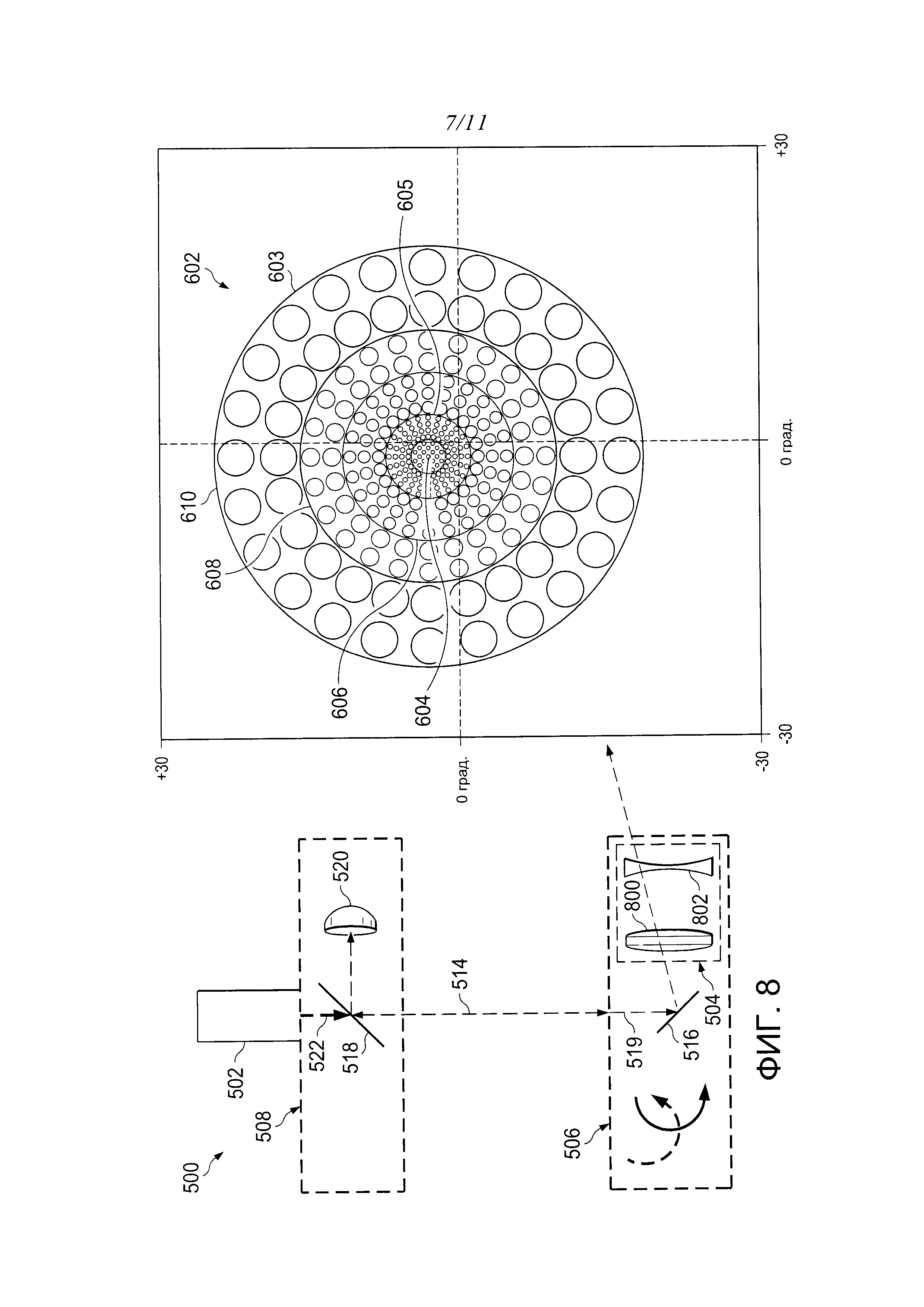
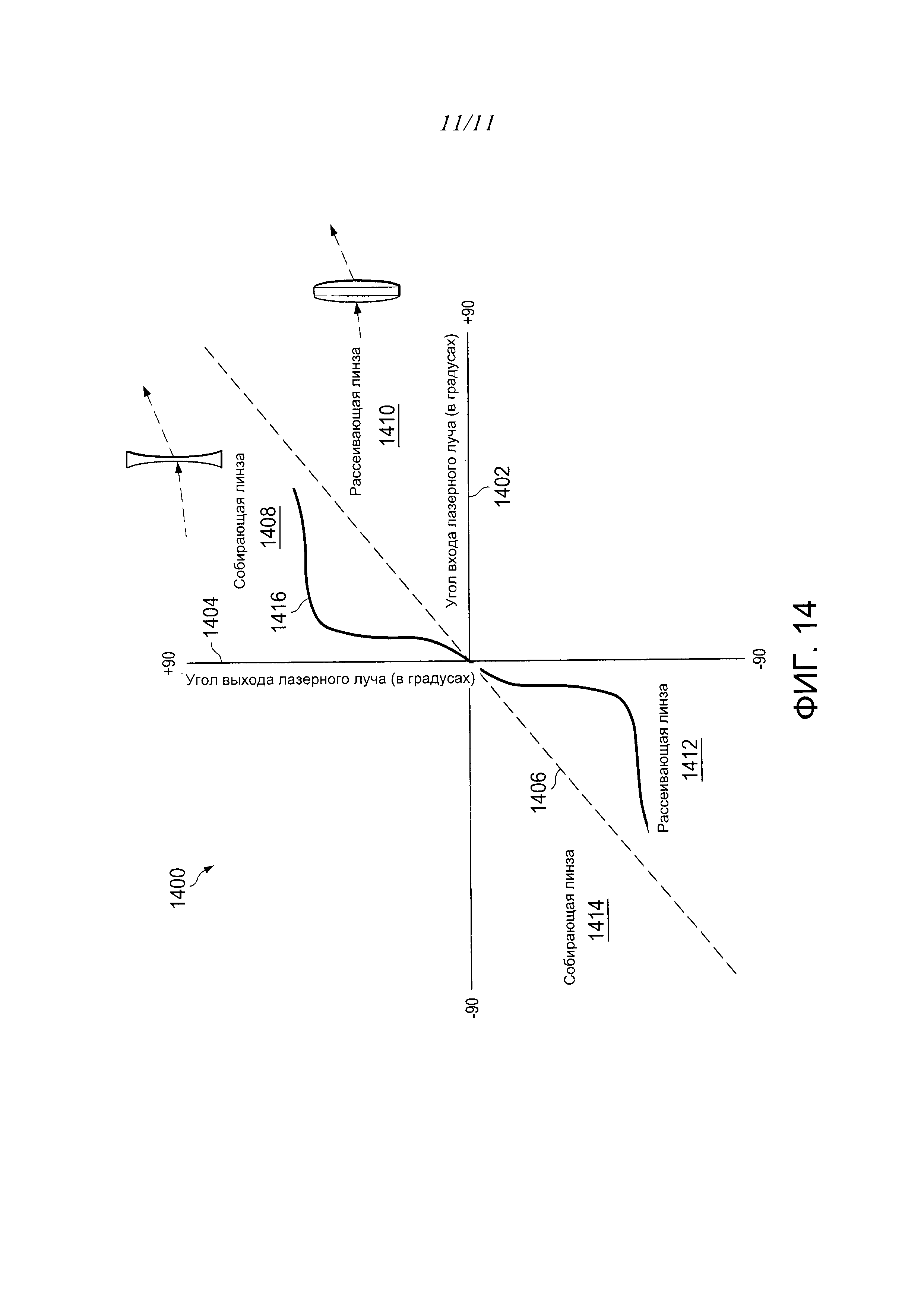
Автоматизированная система визуального осмотра
Комплект соединения и способ сборки такового
Сравнение паноптически визуализируемых документов
Электропроводящее втулочное соединение с конструкцией для пути тока
Ромбовидное окно для композитного и/или металлического каркаса летательного аппарата
Токорассеивающее соединительное устройство транспортирования текучей среды
Система и способ моделирования мощного пироудара
Система и способ отделения диоксида углерода
Слоистые волокнистые композиты для решения баллистических задач
Контолируемая адгезия волокна к матрице в полимер-волоконных композитах
Система обнаружения лазерного воздействия и оповещения о нем

