Результат интеллектуальной деятельности: ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ
Вид РИД
Изобретение
Техническое решение относится к области электротехники, в частности синхронные двигатели с постоянными магнитами и может быть использовано в качестве привода для экзоскелета, включающих электропривод с шаговым двигателем, в частности, линейным и двухкоординатным и требующим точного позиционирования исполнительного механизма.
Известен торцевой моментный электродвигатель. Двигатель содержит торцевой ротор с размещенными на нем постоянными магнитами и два статора, расположенных по обе стороны ротора. Согласно изобретению, магнитопровод каждого статора выполнен из пакетов из пластин, расположенных в радиальном направлении, и из полых цилиндрических частей разных диаметров, каждая из которых имеет зубцы на торце, обращенном к ротору, число данных зубцов равно числу пар полюсов ротора. При этом зубцы наружного и внутреннего цилиндрических частей каждого статора смещены по углу на угловую ширину полюса ротора, между цилиндрическими магнитопроводами размещена кольцевая обмотка одной из двух фаз, а зубцы цилиндрических частей магнитопроводов разных статоров смещены по углу относительно друг друга на половину угловой ширины полюса ротора. Пакеты из пластин, расположенные в радиальном направлении, закреплены на крышках электродвигателя (Патент на изобретение RU 2256276).
Недостатком аналога является отсутствие механического зацепления между статором и ротором, а также увеличенным магнитопроводом статора.
Также известен шаговый электродвигатель с колеблющимся ротором. Двигатель состоит из корпуса с многофазным статором с обмоткой, дискового ротора с шестерней, основного выходного вала с шестерней, дополнительного выходного вала, охватывающего основной, и пальца, жестко закрепленного на дополнительном валу и опирающегося на торцевую поверхность ротора. При поочередном подключении катушек к обмотки статора к источнику питания дисковый ротор совершает колебательное движение, при этом обкатываются колеса и торцовая поверхность ротора пальцем. Из-за разницы чисел зубьев шестерен и выходной будет иметь медленное вращение. Палец вращается с частотой поля статора и поэтому дополнительный вал будет вращаться с частотой поля статора. После снятия напряжения питания выходной вал сохраняет свое положение, т.к. палец фиксирует ротор в наклонном положении. Выходной вал выполнен полым. За счет этого, а также за счет двух выходных валов, вращающихся с разными частотами, достигается расширение функциональных возможностей. (Авторское свидетельство SU 1598066).
К недостатком второго аналога относится жесткое зацепление ротора и статора при остановке двигателя.
В качестве прототипа предлагаемого изобретения выбран торцевой волновой электродвигатель, содержащий корпус, в котором закреплено гибкое, зубчатый венец, который входит в зацепление с зубчатым венцом жесткого колеса, закрепленного на подшипниках в корпусе и жестко связанного с выходным валом (Патент на изобретение RU 2418351).
К недостаткам прототипа торцевого волнового электродвигателя относиться постоянное зацепление зубчатых венцов жесткого и гибкого колеса, для экзоскелета требуется полное размыкание ведомых и ведущих элементов.
Задачей технического решения является обеспечить торцевой двигатель автоматической муфтой, необходимой при размыкании ротора и статора электродвигателя для свободного движения узлов экзоскелета.
Поставленная задача решается благодаря тому, что торцевой электродвигатель с колеблющимся ротором содержит корпус, в котором размещены, статор, ротор, в форме диска, при этом зубья на качающейся и статичной шестерне выполнены торцевыми, в теле качающейся шестерни устанавливаются постоянные неодимовые магниты, а в тело основной шестерни статора устанавливаются электромагнитные катушки с блоком управления, предусмотрено следующее отличие: ротор соединен с выходным валом гибким фланцем.
Между совокупностью существенных признаков заявляемого объекта и достигаемым техническим результатом существует причинно-следственная связь, а именно гибкий фланец который при снятии электрического напряжения с катушек статора под действием упругости выводит качающуюся шестерню из зацепления с шестерней статора и освобождает ротор двигателя.
Техническое решение позволяет применить торцевой электродвигатель в конструкции узлов экзоскелета, обеспечив свободное перемещение технических суставов скелета, обеспечивая привод ротора, только при возникновении потребности.
Техническая сущность предложенного технического решения поясняются чертежом, на котором:
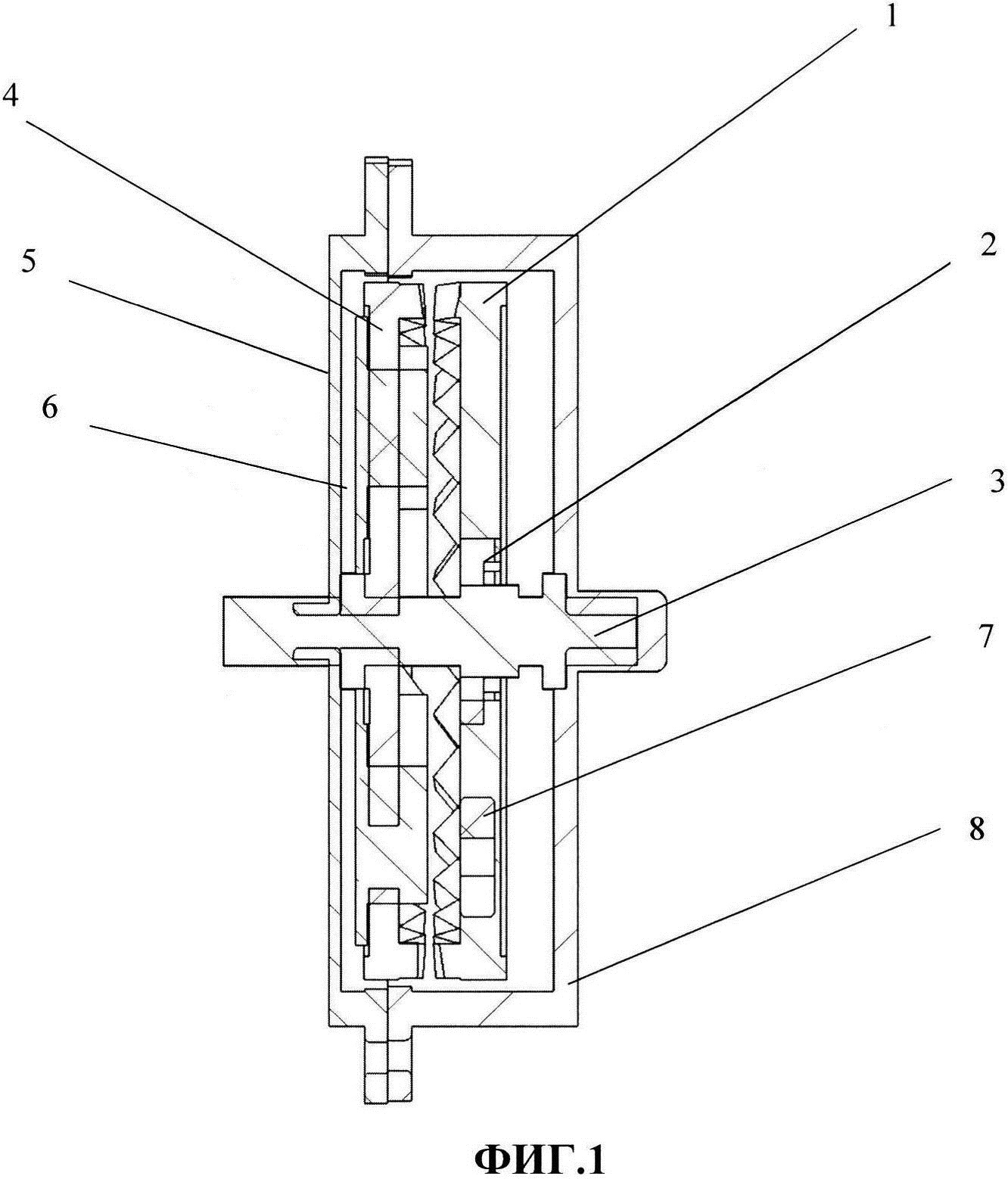
Фиг. 1 - продольный разрез торцевого электродвигателя с колеблющимся ротором.
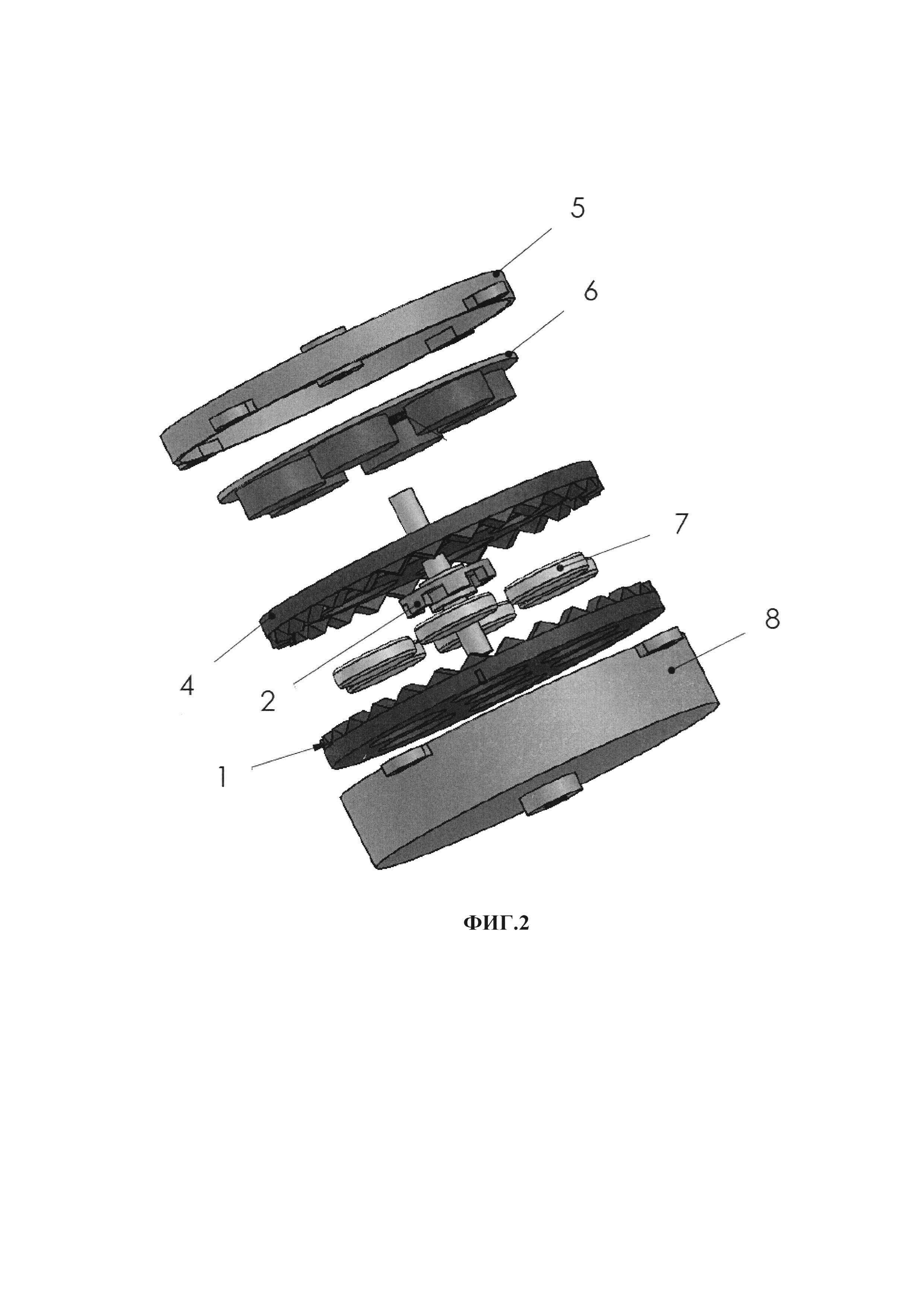
Фиг. 2 - трехмерная сборка торцевого электродвигателя с колеблющимся ротором.
Предложенный торцевой электродвигатель с качающимся ротором состоит из качающейся шестерни 1, гибкого фланца 2, вала 3, ведущей шестерни 4, нижней крышки 5, блока управления 6, постоянных неодимовых магнитов 7, верхней крышки 8.
Торцевой электродвигатель с колеблющимся ротором, содержащий корпус, в котором размещены статор, ротор, в форме диска, при этом зубья на качающейся и статичной шестерне выполнены торцевыми, причем в теле качающейся шестерни устанавливаются неодимовые постоянные магниты, а в тело основной шестерни статора устанавливаются электромагнитные катушки с блоком управления, отличающийся тем, что для получения управляемой встроенной муфты в электродвигателе ротор соединен с валом гибким фланцем, который при снятии электрического напряжения с катушек статора под действием упругости выводит качающуюся шестерню из зацепления с шестерней статора и освобождает ротор двигателя.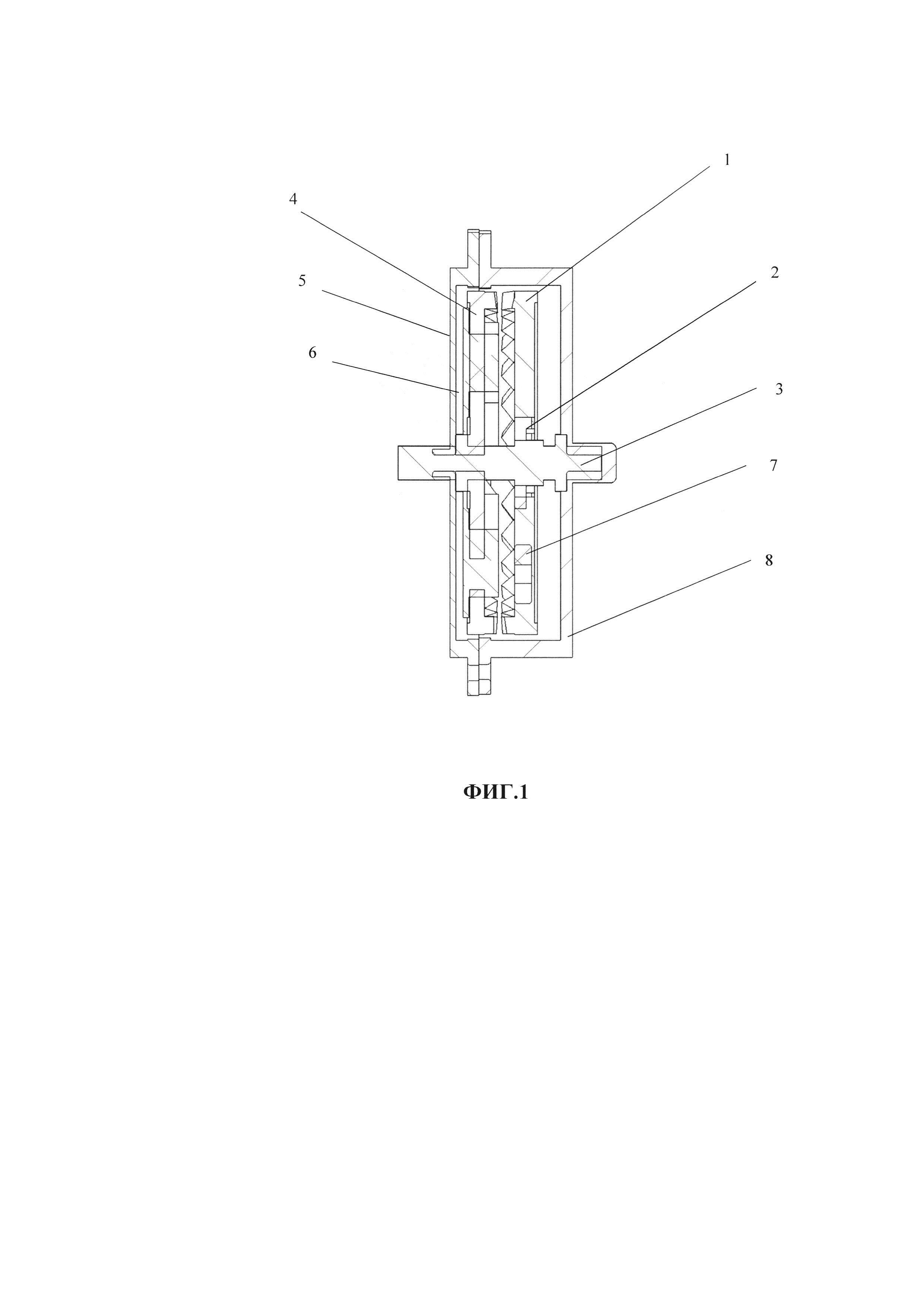
Способ контроля зоны термического влияния сварных соединений
Устройство для контроля сварных соединений
Микрополосковая антенная решётка q-диапазона

