Результат интеллектуальной деятельности: Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями
Вид РИД
Изобретение
Изобретение относится к транспортной технике, в частности к автоматизации тягового привода электроподвижного состава с асинхронными тяговыми двигателями.
Известен способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства, согласно которому сравнивают электрический сигнал, характеризующий режим работы колесной пары с заданным пороговым значением по частоте, при превышении частотой этого порогового значения судят о возникновении боксования (Гриневич В. Способ обнаружения и предотвращения боксования колесной пары рельсового транспортного средства. Патент РФ (RU) 2072670, B60L 3/10 1994 г.). Для реализации способа указанный электрический сигнал формируют посредством упруго-диссипативных элементов, установленных на колесах ведущих пар, что существенно усложняет систему и снижают ее надежность.
Наиболее близким по технической сущности к заявленному является способ, заключающийся в том, что при возникновении боксования (юза) одной или нескольких колесных пар и изменении сигналов, пропорциональных ускорению (замедлению) колесных пар до заданного уровня, вырабатывают управляющие сигналы изменяющие режимы работы систем электропривода (Киреев А.В. Способ защиты от боксования и юза колесных пар электроподвижного состава с вентильно-индукторным электроприводом. Патент РФ (RU) 2382707, B60L 3/10 2010 г.). Недостатком данного способа является длительное время обнаружения избыточного скольжения по сигналам пропорциональных ускорению (замедлению), связанное с большой инерционностью электроподвижного состава.
Задачей изобретения является повышение тяговых свойств электроподвижного состава.
Решение поставленной задачи достигается тем, что при возникновении боксования одной или нескольких колесных пар измеряют текущие активные электрические мощности статорных обмоток асинхронных тяговых двигателей и вычисляют значение абсолютной разницы потребляемых мощностей. Вычисленное значение абсолютной разницы активных электрических мощностей статорных обмоток асинхронных тяговых двигателей сравнивают со значением пороговой мощности и выдают корректирующий сигнал о снижении угловой частоты вращения движущейся с избыточным скольжением колесной пары или угловых частот вращения движущихся с избыточным скольжением колесных пар.
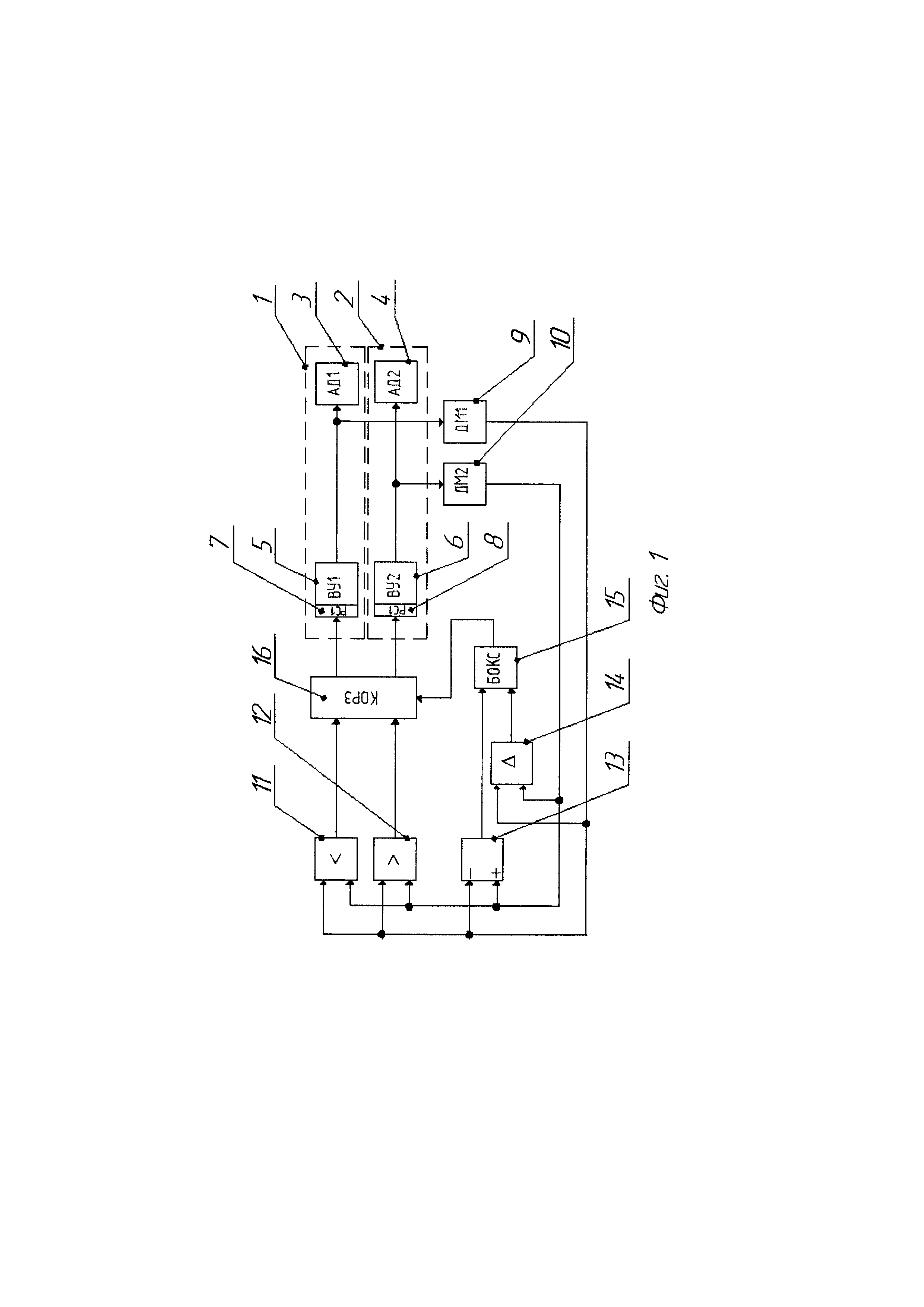
Суть предлагаемого способа определения боксования одной или нескольких колесных пар поясняется функциональной схемой устройства приведенной на фиг. 1, реализующей предлагаемый способ на примере двухдвигательного асинхронного тягового привода.
Согласно изобретению для определения боксования одной или нескольких колесных пар, измеряют текущие значения активных электрических мощностей статорных обмоток асинхронных тяговых двигателей. При достижении значения абсолютной разницы между потребляемыми активными мощностями большее, чем пороговое значение мощности, обуславливающее наличие избыточного скольжения, вырабатывается управляющее воздействие на снижение угловой частоты вращения вала асинхронного тягового двигателя потребляющего наименьшую активную электрическую мощность. При снижении угловой частоты вращения вала асинхронного тягового двигателя и соответствующей ему колесной пары движущейся с избыточным скольжением, повышаются сцепные свойства и сила тяги электроподвижного состава, вследствие чего возрастают тяговые свойства электроподвижного состава.
Ведущие оси транспортного средства согласно фиг. 1, снабжены частотно-регулируемыми приводами 1 и 2 с векторным управлением, содержащими асинхронные тяговые двигатели 3 и 4 и системы векторного управления 5 и 6 с регуляторами скорости 7 и 8.
Устройство защиты от боксования содержит датчики мощности 9 и 10, которые измеряют текущие активные электрические мощности статорных обмоток асинхронных тяговых двигателей 3 и 4. Выходы датчиков мощности 9 и 10 соединены с входами сравнивающих элементов 11 и 12, которые определяют асинхронные тяговые двигатели 3 и 4 с наименьшей и наибольшей мощностью. Выходы датчиков мощности 9 и 10 соединены с входами блока определителя 13, который определят значение абсолютной разницы мощностей асинхронных тяговых двигателей 3 и 4. Выходы датчиков мощности 9 и 10 соединены с входами блока задания разницы мощности 14, который определяет значение пороговой мощности ΔР. Выход блока задания разницы мощности 14 и выход блока определителя 13 соединены с входами блока обнаружения боксования 15, который формирует управляющие сигналы о наличии или не наличии избыточного скольжения. Выходы сравнивающих элементов 11 и 12 и блока обнаружения боксования 15 соединены с входами блока формирования корректирующей скорости 16, который формирует корректирующие задание по скорости.
Блок задания разницы мощности 14 вычисляет значение выходного сигнала по следующему выражению:

где ΔР - пороговая мощность, выходное значение блока задания разницы мощности 14;
Р1 - текущая активная электрическая мощность, выходное значение датчика активной мощности 9;
Р2 - текущая активная электрическая мощность, выходное значение датчика активной мощности 10.
В случае движения электроподвижного состава без избыточного скольжения одной или нескольких колесных пар, датчики мощности 9 и 10 производят измерения текущих активных электрических мощностей статорных обмоток асинхронных тяговых двигателей 3 и 4, и передают измеренные значения на входы сравнивающих элементов 11 и 12, блока определителя 13 и блока задания разницы мощности 14. Сравнивающие элементы 11 и 12 сравнивают измеренные значения с выходов датчиков мощности 9 и 10. При меньшем выходном значении датчика мощности 9, чем выходное значение датчика мощности 10 сравнивающий элемент 11 формирует сигнал об определении асинхронного тягового двигателя 3 как двигателя с наименьшей мощностью, а сравнивающий элемент 12 формирует сигнал об определении асинхронного тягового двигателя 4 как двигателя с наибольшей мощностью. При меньшем выходном значении датчика мощности 10, чем выходное значение датчика мощности 9 сравнивающий элемент 12 формирует сигнал об определении асинхронного тягового двигателя 4 как двигателя с наименьшей мощностью, а сравнивающий элемент 11 формирует сигнал об определении асинхронного тягового двигателя 3 как двигателя с наибольшей мощностью. При этом блок определителя 13 вычисляет абсолютную разницу между выходным значением датчика мощности 9 и выходным значением датчика мощности 10, и выдает вычисленное выходное значение величины на вход блока обнаружения боксования 15, который сравнивает полученное значение с выходным значением пороговой мощности PΔ блока задания разницы мощности 14. При отсутствии избыточного скольжения выходное значение величины блока определителя 13 не превышает выходного значения пороговой мощности ΔР блока задания разницы мощности 14, и блок обнаружения боксования 15 выдает сигнал об отсутствии избыточного скольжения. Блок формирования корректирующего задания 16 принимает сигналы от блоков сравнения 11 и 12 и блока обнаружения боксования 15, и не выдает корректирующие воздействия на входы регуляторов скорости 7 и 8 векторных систем управления 5 и 6.
В случае движения электроподвижного состава с избыточным скольжением одной или нескольких колесных пар, датчики мощности 9 и 10 производят измерения текущих активных электрических мощностей статорных обмоток асинхронных тяговых двигателей 3 и 4, и передают измеренные значения на входы сравнивающих элементов 11 и 12, блока определителя 13 и блока задания разницы мощности 14. Сравнивающие элементы 11 и 12 сравнивают измеренные значения с выходов датчиков мощности 9 и 10. При меньшем выходном значении датчика мощности 9, чем выходное значение датчика мощности 10, сравнивающий элемент 11 формирует сигнал об определении асинхронного тягового двигателя 3 как двигателя с наименьшей мощностью, а сравнивающий элемент 12 формирует сигнал об определении асинхронного тягового двигателя 4 как двигателя с наибольшей мощностью. При меньшем выходном значении датчика мощности 10, чем выходное значение датчика мощности 9. сравнивающий элемент 12 формирует предварительный сигнал об определении асинхронного тягового двигателя 4 как двигателя с наименьшей мощностью, а сравнивающий элемент 11 формирует сигнал об определении асинхронного тягового двигателя 3 как двигателя с наибольшей мощностью. При этом блок определителя 13 вычисляет абсолютную разницу между выходным значением датчика мощности 9 и выходным значением датчика мощности 10, и выдает вычисленное выходное значение величины на вход блока обнаружения боксования 15, который сравнивает полученное значение с выходным значением пороговой мощности ΔР блока задания разницы мощности 14. При наличии избыточного проскальзывания выходное значение величины блока определителя 13 превышает значение пороговой мощности ΔР блока задания разницы мощности 14, и блок обнаружения боксования 15 выдает сигнал о наличии избыточного скольжения. Блок формирования корректирующего задания 16 принимает сигналы от блоков сравнения 11 и 12 и блока обнаружения боксования 15, и выдает сигнал о снижении скорости. При меньшем выходном значении датчика мощности 9, чем выходное значение датчика мощности 10 выходной сигнал о снижении скорости блока корректирующего задания 16 поступает на вход регулятора скорости 7 векторной системы управления 5, до того момента как выходное значение блока определителя 13 станет меньше выходного значения блока задания разницы мощности 14. При меньшем выходном значении датчика мощности 10, чем выходное значение датчика мощности 9, выходной сигнал о снижении скорости блока корректирующего задания 16 поступает на вход регулятора скорости 8 векторной системы управления 6, до того момента как выходное значение блока определителя 13 станет меньше выходного значения блока задания разницы мощности 14. Совокупность этих действий предотвращает развитие избыточного скольжения колесной пары и обеспечивает реализацию предельной силы тяги по условиям сцепления.
Таким образом, предлагаемый способ защиты от боксования колесных пар путем измерения активных электрических мощностей статорных обмоток асинхронных тяговых двигателей 3 и 4, и сравнивания абсолютной разницы измеренных значений активных электрических мощностей и значения пороговой мощности ΔР позволяет предотвратить развитие процесса избыточного скольжения выше допустимой величины, реализовать режимы работы привода, предельные по условиям сцепления и повысить быстродействие обнаружения избыточного скольжения, что в совокупности повышает тяговые свойства электроподвижного состава.
Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями, заключающийся в том, что при возникновении боксования одной или нескольких колесных пар вырабатываются сигналы о снижении угловой частоты вращения избыточно скользящей колесной пары или угловых частот вращений избыточно скользящих колесных пар, отличающийся тем, что избыточное скольжение определяют путем сравнения значения абсолютной разности измеренных текущих активных электрических мощностей статорных обмоток асинхронных тяговых двигателей и значения пороговой мощности.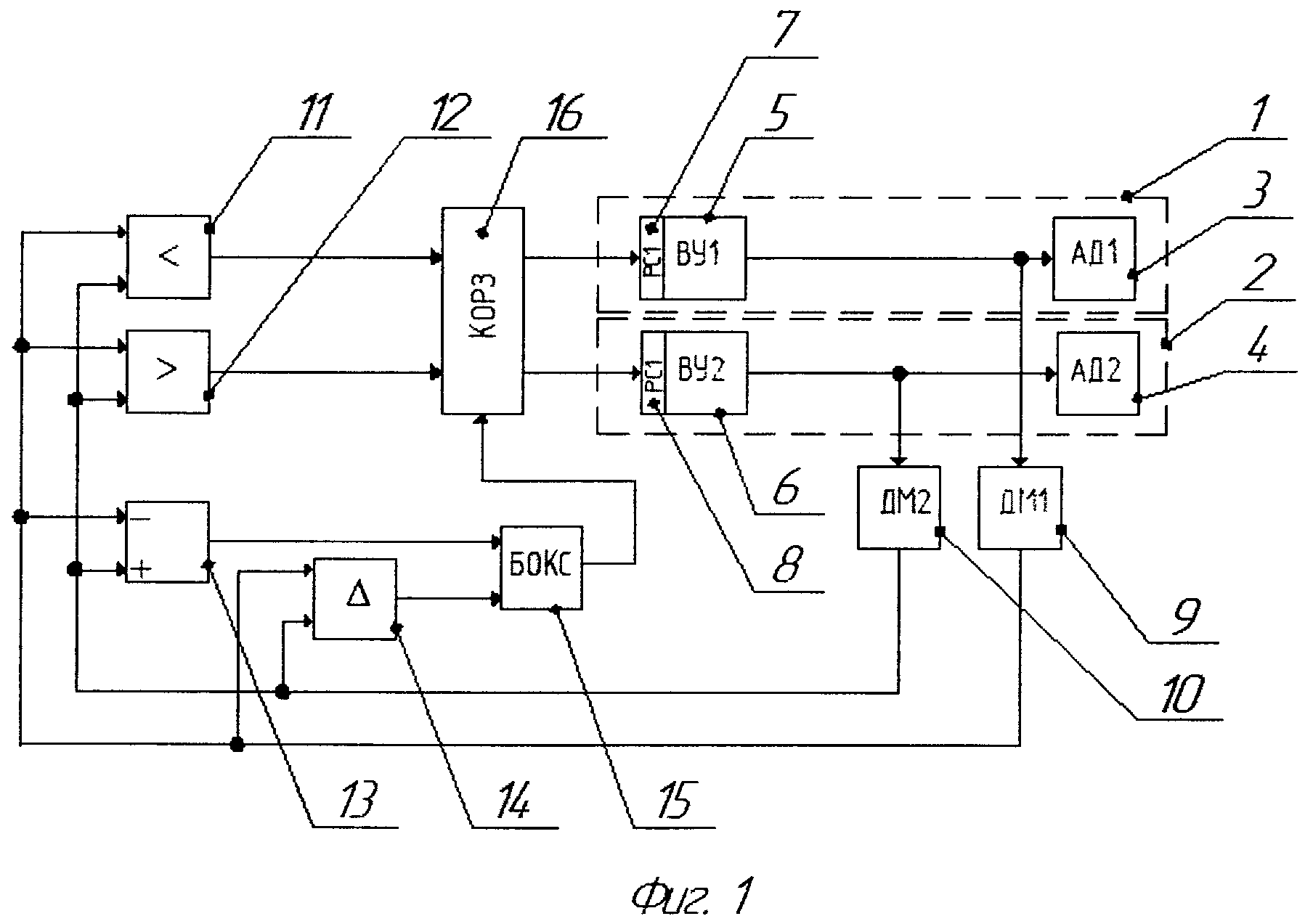
Способ сушки изоляции тяговых электродвигателей электровоза

