Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Представленное раскрытие относится к области технологий беспилотных летательных аппаратов и, в частности, к способу управления беспилотным летательным аппаратом и к устройству управления беспилотным летательным аппаратом.
Уровень техники
При непрерывном развитии технологий беспилотных летательных аппаратов такие беспилотные летательные аппараты широко использовались для защиты растительности, воздушного наблюдения и аэрофотосъемки. Обычно беспилотный летательный аппарат управляется следующим образом: устройство дистанционного управления получает от пользователя операцию управления беспилотным летательным аппаратом, формирует соответствующую команду управления беспилотным летательным аппаратом и затем посылает команду управления беспилотным летательным аппаратом на беспилотный летательный аппарат посредством способа беспроводной передачи сигнала, с тем, чтобы управлять беспилотным летательным аппаратом для выполнения соответствующего действия. Существующие способы управления беспилотными летательными аппаратами требуют, чтобы контроллер беспилотного летательного аппарата был пригоден для работы беспилотного летательного аппарата и, следовательно, неприемлемы для обычных пользователей.
Сущность изобретения
Вариант осуществления представленного раскрытия представляет способ управления беспилотным летательным аппаратом для решения проблемы, состоящей в том, что существующие способы управления беспилотным летательным аппаратом, которые требуют от пользователя беспилотного летательного аппарата, по меньшей мере, владения технологией управления по высокому стандарту, неприемлемы для обычных пользователей.
В первом подходе вариант осуществления представленного раскрытия описывает способ управления беспилотным летательным аппаратом, содержащий этапы, на которых:
получают (или собирают) в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы;
формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения; и
управляют беспилотным летательным аппаратом для выполнения соответствующего полетного действия в соответствии по меньшей мере с одной командой управления беспилотным летательным аппаратом.
При втором подходе вариант осуществления представленного раскрытия описывает устройство управления беспилотным летательным аппаратом, содержащее:
модуль получения информации о состоянии движения, выполненный с возможностью получения (или сбора) в режиме реального времени информации о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы;
модуль формирования команды управления, выполненный с возможностью формирования по меньшей мере одной команды управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, получаемой модулем получения информации о состоянии движения; и
модуль управления полетом, выполненный с возможностью управления беспилотным летательным аппаратом, чтобы выполнять соответствующее полетное действие в соответствии по меньшей мере с одной командой управления беспилотным летательным аппаратом, сформированной модулем формирования команды управления.
Получая в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, и управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие в соответствии по меньшей мере с одной командой управления беспилотным летательным аппаратом, причем способ управления беспилотным летательным аппаратом, раскрытый здесь, решает проблему, когда существующие способы управления беспилотным летательным аппаратом, которые требуют от пользователя беспилотного летательного аппарата, по меньшей мере, владения технологией управления высокого стандарта, неприменимы для обычных пользователей. После того, как беспилотный летательный аппарат начинает двигаться под воздействием приложенной пользователем внешней силы, раскрытый здесь способ управления дополнительно управляет беспилотным летательным аппаратом, чтобы выполнять соответствующее полетное действие в соответствии с текущей тенденцией движения беспилотного летательного аппарата, освобождая, таким образом, пользователя от необходимости освоения сложной технологии управления беспилотным летательным аппаратом, снижая трудности управления беспилотным летательным аппаратом и делая беспилотный летательный аппарат более приемлемым.
Краткое описание чертежей
Чтобы сделать технические решения представленного изобретения более понятыми, ниже кратко представляются сопроводительные чертежи, необходимые для описания вариантов осуществления представленного раскрытия. Очевидно, что сопроводительные чертежи являются просто иллюстрациями некоторых вариантов осуществления представленного раскрытия и специалистами в данной области техники, без приложения творческих усилий, могут быть разработаны другие чертежи, основанные на упомянутых сопроводительных чертежах.
Фиг. 1 - блок-схема последовательности осуществления операций способа управления беспилотным летательным аппаратом, соответствующая варианту 1 осуществления представленного раскрытия;
Фиг. 2 - блок-схема последовательности выполнения операций способа управления беспилотным летательным аппаратом, соответствующая варианту 2 осуществления представленного раскрытия;
Фиг. 3 - структурная схема 1 устройства управления беспилотным летательным аппаратом, соответствующая варианту 3 осуществления представленного раскрытия;
Фиг. 4 - структурная схема 2 устройства управления беспилотным летательным аппаратом, соответствующая варианту 3 осуществления представленного раскрытия; и
Фиг. 5 - структурная схема 3 управления беспилотным летательным аппаратом, соответствующая варианту 3 осуществления представленного раскрытия.
Подробое описание вариантов осуществления
Представленные здесь технические решения будут ясно и полностью описаны ниже со ссылкой на сопроводительные чертежи и, очевидно, варианты осуществления, описанные здесь, являются только частью, а не всеми вариантами осуществления представленного раскрытия. Любой вариант осуществления, который без приложения творческих усилий разрабатывается специалистами в данной области техники, основываясь на упомянутых здесь вариантах осуществления, должен попадать в рамки объема защиты представленного раскрытия.
Вариант 1 осуществления
Способ управления беспилотным летательным аппаратом раскрывается в варианте осуществления, который, как показано на фиг. 1, содержит нижеследующие этапы 100-120.
Этап 100: в режиме реального времени получают информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы.
Информация о состоянии движения беспилотного летательного аппарата содержит по меньшей мере одно из следующего: линейное ускорение, угловая скорость или угловое ускорение беспилотного летательного аппарата. Приложенная пользователем внешняя сила относится к силе, прилагаемой пользователем к беспилотному летательному аппарату, когда пользователь касается беспилотного летательного аппарата, и является, например, тянущей/толкающей силой, приложенной пользователем к беспилотному летательному аппарату, вращающей силой, приложенной пользователем к беспилотному летательному аппарату, или силой, приложенной пользователем, чтобы захватить беспилотный летательный аппарат. В конкретных реализациях направление линейного ускорения беспилотного летательного аппарата является направлением приложенной пользователем внешней силы и поэтому может быть любым пространственным направлением, то есть, линейное ускорение содержит, не ограничиваясь только этим, горизонтальное линейное ускорение и вертикальное линейное ускорение. Полученная информация о состоянии движения беспилотного летательного аппарата отражает величину и направление внешней силы, приложенной контроллером к беспилотному летательному аппарату. Например, когда пользователь вращает беспилотный летательный аппарат, внешняя сила, приложенная к беспилотному летательному аппарату, заставляет беспилотный летательный аппарат переходить из состояния зависания в состояние вращения и датчик угловой скорости (например, гироскоп), расположенный на беспилотном летательном аппарате, получает данные угловой скорости в реальном времени и/или углового ускорения в реальном времени для вращающегося беспилотного летательного аппарата; когда пользователь толкает/тянет беспилотный летательный аппарат в определенном направлении, беспилотный летательный аппарат движется линейно вдоль направления толкающей/тянущей силы и датчик ускорения, установленный на беспилотном летательном аппарате, получает информацию о горизонтальном линейном ускорении и вертикальном линейном ускорении беспилотного летательного аппарата; когда пользователь толкает беспилотный летательный аппарат с вращением в определенном направлении, внешняя сила, приложенная к беспилотному летательному аппарату, заставляет беспилотный летательный аппарат, находящийся в состоянии зависания, вращаться и одновременно перемещает беспилотный летательный аппарат линейно вдоль толкающей силы, приложенной пользователем к беспилотному летательному аппарату, и в этом случае датчик ускорения, расположенный на беспилотном летательном аппарате, получает информацию о горизонтальном линейном ускорении и вертикальном линейном ускорении беспилотного летательного аппарата, а датчик угловой скорости (например, гироскоп), расположенный на беспилотном летательном аппарате, получает информацию об угловой скорости в реальном режиме времени и/или об угловом ускорении в реальном режиме времени для вращающегося беспилотного летательного аппарата. Кроме того, величина внешней силы, приложенной пользователем к беспилотному летательному аппарату, напрямую влияет на начальную скорость беспилотного летательного аппарата. Таким образом, когда внешняя сила приложена пользователем беспилотного летательного аппарата по направлению или по величине, состояние движения беспилотного летательного аппарата изменяется и, таким образом, получают информацию о состоянии движения беспилотного летательного аппарата. В конкретных реализациях, после того, как беспилотный летательный аппарат начинает движение под воздействием приложенной пользователем внешней силы, получаемая информация о состоянии движения беспилотного летательного аппарата может содержать: угловую скорость и угловое ускорение беспилотного летательного аппарата; горизонтальное линейное ускорение беспилотного летательного аппарата; вертикальное линейное ускорение беспилотного летательного аппарата; угловую скорость, угловое ускорение и горизонтальное линейное ускорение беспилотного летательного аппарата; угловую скорость, угловое ускорение и вертикальное линейное ускорение беспилотного летательного аппарата; горизонтальное линейное ускорение и вертикальное линейное ускорение беспилотного летательного аппарата; или угловую скорость, угловое ускорение, горизонтальное линейное ускорение и вертикальное линейное ускорение беспилотного летательного аппарата.
После того, как беспилотный летательный аппарат начинает двигаться под воздействием приложенной пользователем внешней силы, информация о состоянии движения беспилотного летательного аппарата дополнительно содержит линейную скорость беспилотного летательного аппарата. Направление линейной скорости беспилотного летательного аппарата является направлением приложенной пользователем внешней силы и поэтому может быть любым пространственным направлением, то есть, линейная скорость содержит, не ограничиваясь только этим, горизонтальную линейную скорость и вертикальную линейную скорость беспилотного летательного аппарата.
Получение (или сбор) в режиме реального времени информации о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, выполняют согласно заданному периоду получения информации о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы. Обычно, заданный период очень короткий, например, 30 мс или меньше 30 мс, и таким образом, получение информации о состоянии движения беспилотного летательного аппарата, получаемой в течение каждого заданного периода, можно считаться получением информации о состоянии движения беспилотного летательного аппарата в реальном времени.
Этап 110: формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения.
Различные команды управления беспилотным летательным аппаратом формируют, основываясь на различной информации о состоянии движения. Команда управления беспилотным летательным аппаратом, сформированная в варианте осуществления представленного раскрытия, содержит все команды управления беспилотным летательным аппаратом, сформированные существующими средствами управления для находящегося на удалении беспилотного летательного аппарата, например, команда управления полетом беспилотного летательного аппарата в определенное место, команда управления полетом беспилотного летательного аппарата с конкретной линейной скоростью, команда управления полетом беспилотного летательного аппарата на определенной высоте, команда управления полетом для зависания беспилотного летательного аппарата на определенной высоте, команда управления вращением беспилотного летательного аппарата с определенной угловой скоростью и команда управления ориентацией головной части беспилотного летательного аппарата в определенном направлении. Определенное место относится к любому пространственному положению, которое может быть представлено координатами, используемыми в международной системе координат, или относительными координатами, которые принимают беспилотный летательный аппарат в качестве начала координат. В некоторых реализациях команда управления беспилотным летательным аппаратом может быть сформирована в соответствии с тенденцией изменения одного или более таких параметров, как линейное ускорение, линейная скорость, угловое ускорение и угловая скорость беспилотного летательного аппарата, полученных в режиме реального времени. Например, команда управления беспилотным летательным аппаратом для полета обратно в начальное место расположения беспилотного летательного аппарата формируется в соответствии с тенденциями изменения горизонтального линейного ускорения беспилотного летательного аппарата, а команда управления ориентацией головной части беспилотного летательного аппарата или вращения беспилотного летательного аппарата формируется в соответствии с тенденциями изменения угловой скорости или углового ускорения беспилотного летательного аппарата.
Этап 120: управляют беспилотным летательным аппаратом в соответствии по меньшей мере с одной командой управления беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие.
Поскольку тенденция движения беспилотного летательного аппарата изменяется при изменении направления и величина внешней силы, прикладываемой пользователем к беспилотному летательному аппарату, то может формироваться по меньшей мере одна команда управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения беспилотного летательного аппарата. Беспилотным летательным аппаратом можно управлять согласно команде управления беспилотным летательным аппаратом, сформированной на предшествующих этапах, чтобы выполнить соответствующее полетное действие, такое как зависание, вращение, подъем, спуск, горизонтальный полет и горизонтальное вращение. Как управлять беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие согласно по меньшей мере одной команде управления беспилотным летательным аппаратом, может быть понято, используя существующие технологии, которые повторно здесь не описываются.
Получая (или собирая) в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, и управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие согласно по меньшей мере одной команде управления беспилотным летательным аппаратом, причем способ управления беспилотным летательным аппаратом, раскрытый здесь, решает проблему, заключающейся в том, что существующие способы управления беспилотным летательным аппаратом, которые требуют от пользователя беспилотного летательного аппарата, по меньшей мере, освоения технологии управления по высоким стандартам, неприменимы для обычных пользователей. После того, как беспилотный летательный аппарат движется под воздействием приложенной пользователем внешней силы, в раскрытом здесь способе управления дополнительно управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие в соответствии с текущей тенденцией движения беспилотного летательного аппарата, освобождая, таким образом, пользователя от освоения сложной технологией управления беспилотным летательным аппаратом, снижая трудности управления беспилотным летательным аппаратом и создавая более приемлемый беспилотный летательный аппарат.
Вариант 2 осуществления
Способ управления беспилотным летательным аппаратом представляется в варианте осуществления, который, как показано на фиг. 2, содержит следующие этапы 200-230.
Этап 200: получают информацию о состоянии зависания беспилотного летательного аппарата.
Информация о состоянии зависания содержит начальное положение беспилотного летательного аппарата и начальное направление головной части беспилотного летательного аппарата, где начальное положение беспилотного летательного аппарата содержит начальное горизонтальное положение и начальную высоту беспилотного летательного аппарата. Уникальное начальное положение беспилотного летательного аппарата может быть определено начальным горизонтальным положением и начальной высотой беспилотного летательного аппарата, а начальным направлением головной части беспилотного летательного аппарата является направление головной части беспилотного летательного аппарата в состоянии зависания.
При отсутствии воздействия приложенной вручную внешней силы беспилотный летательный аппарат остается в состоянии зависания, то есть, беспилотный летательный аппарат зависает на определенной высоте с неизменным направлением его головной части, так чтобы оставаться в начальном горизонтальном положении. В реализациях данные о текущем положении, например, о горизонтальном положении и высоте беспилотного летательного аппарата получают модуль GPS, камера, лазерный датчик и т. п., которые устанавливаются на беспилотном летательном аппарате, и измеряют линейную скорость беспилотного летательного аппарата в движении. Угловая скорость и угловое ускорение беспилотного летательного аппарата измеряются гироскопом, магнитометром или акселерометром, которые располагаются на беспилотном летательном аппарате. В конкретных реализациях начальное положение беспилотного летательного аппарата может быть представлено с помощью координат GPS.
Информация о состоянии зависания беспилотного летательного аппарата может быть получена, используя существующие сопутствующие способы, которые повторно здесь не описываются.
Этап 210: получают в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы.
Информация о состоянии движения беспилотного летательного аппарата содержит по меньшей мере один из следующих параметров: линейное ускорение и угловая скорость беспилотного летательного аппарата. В конкретных реализациях направление линейного ускорения беспилотного летательного аппарата является направлением приложенной пользователем внешней силы и поэтому может быть любым пространственным направлением. Линейное ускорение беспилотного летательного аппарата может быть напрямую представлено величиной и направлением линейного ускорения или горизонтальным направлением и величиной горизонтального линейного ускорения плюс вертикальным направлением и величиной вертикального линейного ускорения или величиной линейного ускорения в направлении оси X, величиной линейного ускорения в направлении оси Y и величиной линейного ускорения в направлении оси Z в пространственной системе координат. Никакие ограничения в представлении линейного ускорения здесь не задаются. В конкретных реализациях упомянутое здесь линейное ускорения может быть представлено в любой форме представления линейного ускорения. В варианте осуществления, чтобы сделать способ управления беспилотным летательным аппаратом более понятным, способ управления беспилотным летательным аппаратом описывается подробно, основываясь на примере представления линейного ускорения с помощью горизонтального линейного ускорения и линейного ускорения. Полученная информация о состоянии движения беспилотного летательного аппарата отражает величину и направление внешней силы, приложенной пользователем к беспилотному летательному аппарату, и в конкретных реализациях команда управления беспилотным летательным аппаратом формируется в соответствии с тенденцией изменения информации о состоянии движения, получаемой беспилотным летательным аппаратом.
Когда внешняя сила, приложенная пользователем к беспилотному летательному аппарату изменяется по направлению или по величине, состояние движения беспилотного летательного аппарата изменяется, что изменяет получаемую информацию о состоянии движения беспилотного летательного аппарата. В конкретных реализациях, после того, как беспилотный летательный аппарат начинает двигаться под воздействием внешней силы, приложенной контроллером, полученная информация о состоянии движения беспилотного летательного аппарата может содержать следующее: угловая скорость беспилотного летательного аппарата; горизонтальное линейное ускорение беспилотного летательного аппарата; вертикальное линейное ускорение беспилотного летательного аппарата; угловая скорость и горизонтальное линейное ускорение беспилотного летательного аппарата; угловая скорость и вертикальное линейное ускорение беспилотного летательного аппарата; горизонтальное линейное ускорение и вертикальное линейное ускорение беспилотного летательного аппарата; и угловая скорость, горизонтальное линейное ускорение и вертикальное линейное ускорение беспилотного летательного аппарата.
В конкретных реализациях угловая скорость беспилотного летательного аппарата может быть получена с помощью гироскопа, установленного на беспилотном летательном аппарате, а ускорение беспилотного летательного аппарата может быть получено датчиком ускорения, установленным на беспилотном летательном аппарате. Линейное ускорение беспилотного летательного аппарата содержит горизонтальное линейное ускорение и вертикальное линейное ускорение беспилотного летательного аппарата. Горизонтальное линейное ускорение содержит ускорения в две размерностях горизонтальной плоскости, и в конкретных реализациях, ради удобства управления, горизонтальное линейное ускорение может быть сформировано в соответствии с ускорениями в двух размерностях горизонтальной плоскости. Сформированное горизонтальное ускорение имеет два атрибута: величина ускорения и направление ускорения.
Этап 220: формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения.
Другие команды управления беспилотным летательным аппаратом формируют, основываясь на другой информации о состоянии движения. Команда управления беспилотным летательным аппаратом, сформированная в варианте осуществления, содержит все команды управления беспилотным летательным аппаратом, сформированные существующими пультами дистанционного управления для беспилотных летательных аппаратов. Ниже подробно описывается формирование по меньшей мере одной команды управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения. Полученная информация о состоянии движения содержит одно или более из следующего: горизонтальное линейное ускорение, вертикальное линейное ускорение и угловая скорость беспилотного летательного аппарата. В варианте осуществления представленного раскрытия информация о состоянии движения описывается, основываясь на линейном движении и движении вращения. Информация о состоянии движения беспилотного летательного аппарата, выполняющего линейное действие, содержит линейное ускорение и линейную скорость беспилотного летательного аппарата. Информация о состоянии движения беспилотного летательного аппарата, выполняющего действие вращения, содержит угловую скорость и угловое ускорение беспилотного летательного аппарата. Информация о состоянии движения беспилотного летательного аппарата, синхронно выполняющего линейное действие и действие вращения, содержит линейное ускорение, линейную скорость, угловую скорость и угловое ускорение беспилотного летательного аппарата. В реализациях беспилотным летательным аппаратом можно управлять для выполнения соответствующих полетных действий, отдельно формируя команду управления линейным движением и команду управления движением вращения. Для лучшего понимания, информация о состоянии движения беспилотного летательного аппарата описывается посредством типа.
Тип 1: информация о состоянии движения беспилотного летательного аппарата содержит линейную скорость и линейное ускорение беспилотного летательного аппарата.
Формирование по меньшей мере одной команды управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, содержит: определение, в соответствии с тенденцией изменения линейного ускорения беспилотного летательного аппарата, получаемого в режиме реального времени, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает двигаться, помеховой внешней силой, и если «да», то формируют первую команду для управления беспилотным летательным аппаратом, чтобы лететь обратно в его начальное положение, иначе говоря, формируют команду управления беспилотным летательным аппаратом, соответствующую линейной скорости беспилотного летательного аппарата, полученной в режиме реального времени.
Принимая в качестве примера информацию о состоянии движения, являющуюся горизонтальным линейным ускорением беспилотного летательного аппарата, этап определения, соответствующий тенденции изменения линейного ускорения беспилотного летательного аппарата, полученного в режиме реального времени, в соответствии с тем, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, содержит этап, на котором: определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой, если интервал между первым моментом времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата увеличивается до первого порога ускорения, и вторым моментом времени, в который пиковое горизонтальное линейное ускорение беспилотного летательного аппарата уменьшается до первого порога ускорения, будет меньше первого временного порога, или определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, не является помеховой внешней силой, если интервал между первым моментом времени и вторым моментом времени равен или больше первого временного порога.
Горизонтальное линейное ускорение беспилотного летательного аппарата является почти нулевым, когда беспилотный летательный аппарат находится в состоянии зависания. Если пользователь горизонтально толкает беспилотный летательный аппарат в состоянии зависания, то беспилотный летательный аппарат начинает двигаться под воздействием горизонтальной толкающей силы, получает относительно большое ускорение в горизонтальном направлении и, таким образом, горизонтальное линейное ускорение беспилотного летательного аппарата быстро увеличивается от 0 и постепенно уменьшается после того, как внешняя сила исчезает. В конкретных реализациях горизонтальное линейное ускорение беспилотного летательного аппарата получают в режиме реального времени во время процесса движения беспилотного летательного аппарата под воздействием внешней силы. Сначала, момент времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата увеличивается до первого порога ускорения, обозначается как T1; затем, горизонтальное линейное ускорение беспилотного летательного аппарата постепенно увеличивается, достигает пика, когда внешняя сила исчезает и начинает уменьшаться; момент времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата уменьшается до первого порога ускорения, обозначается как T2; наконец, в соответствии с тенденцией изменения горизонтального линейного ускорения беспилотного летательного аппарата формируется команда управления беспилотным летательным аппаратом. Например, текущая внешняя сила рассматривается как помеховая внешняя сила, если интервал между T2 и T1 меньше первого временного порога, или не рассматривается как помеховая внешняя сила, если интервал между T2 и T1 равен или больше первого временного порога. Первая команда управления беспилотным летательным аппаратом лететь обратно в его начальное горизонтальное положение, формируется, если приложенная пользователем внешняя сила является помеховой внешней силой. Если приложенная пользователем внешняя сила не является помеховой внешней силой, команда управления беспилотным летательным аппаратом, например, команда управления беспилотным летательным аппаратом для прекращения полета вдоль горизонтального направления или команда управления беспилотным летательным аппаратом лететь на текущей линейной скорости, формируется в соответствии с данными линейной скорости, полученными в режиме реального времени. Устанавливая условие тенденции изменения горизонтального линейного ускорения, помеха, вызванная внешней силой, и помеха или ошибка, вызванная измерением ускорения, могут быть эффективно исключены. В конкретных реализациях линейная скорость беспилотного летательного аппарата в движении может быть измерена устройством, например, модулем GPS, камерой и лазерным датчиком, расположенными на беспилотном летательном аппарате. Сбор данных текущей линейной скорости беспилотного летательного аппарата может быть осуществлен, используя существующие сопутствующие способы, которые повторно здесь не описываются.
Принимая в качестве примера информацию о состоянии движения, являющуюся вертикальным линейным ускорением беспилотного летательного аппарата, определение в соответствии с тенденцией изменения линейного ускорения беспилотного летательного аппарата, полученного в режиме реального времени, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, содержит этап, на котором: определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой, если интервал между третьим моментом времени, в который вертикальное линейное ускорение беспилотного летательного аппарата увеличивается до второго порога ускорения, и четвертым моментом времени, в который пиковое вертикальное линейное ускорение беспилотного летательного аппарата уменьшается до второго порога ускорения, будет меньше второго временного порога, или определяют, что приложенная пользователем внешняя сила не является помеховой внешней силой, если интервал между третьим моментом времени и четвертым моментом времени равен или больше второго временного порога. В варианте осуществления вертикальное линейное ускорение беспилотного летательного аппарата является линейным ускорением, сформированным под воздействием приложенной пользователем внешней силы, не содержащим ускорение силы тяжести. В конкретных реализациях, если вертикальная линейная скорость, измеренная датчиком ускорения беспилотного летательного аппарата, содержит ускорение силы тяжести, вертикальное линейное ускорение, сформированное под воздействием приложенной пользователем внешней силы, может быть вычислено, прибавляя ускорение силы тяжести к вертикальному линейному ускорению или вычитая ускорение силы тяжести из вертикального линейного ускорения, полученного датчиком ускорения в направлении вертикального линейного ускорения.
Поскольку вертикальное линейное ускорения беспилотного летательного аппарата в состоянии зависания равно 0, чтобы скомпенсировать силу тяжести, система управления полетом беспилотного летательного аппарата формирует для беспилотного летательного аппарата силу, равную по величине, но противоположную по направлению силе тяжести. Когда пользователь вертикально толкает/тянет беспилотный летательный аппарат в состоянии зависания, то беспилотный летательный аппарат начинает двигаться под воздействием вертикальной толкающей/тянущей силы и получает в вертикальном направлении ускорение, отличное от ускорения силы тяжести, и, таким образом, вертикальное ускорение беспилотного летательного аппарата постепенно увеличивается от 0 под воздействием приложенной пользователем внешней силы и постепенно уменьшается после того, как внешняя сила исчезает. В конкретных реализациях вертикальное линейное ускорение беспилотного летательного аппарата получают в режиме реального времени во время процесса движения беспилотного летательного аппарата под воздействием внешней силы. Сначала, момент времени, в который вертикальное линейное ускорение беспилотного летательного аппарата увеличивается до второго порога ускорения, обозначается как T3; затем вертикальное линейное ускорение беспилотного летательного аппарата постепенно увеличивается, достигает пика, когда внешняя сила исчезает, и затем начинает уменьшаться; момент времени, в который вертикальное линейное ускорение беспилотного летательного аппарата уменьшается до второго порога ускорения, обозначается как T4; наконец, в соответствии с тенденцией изменения вертикального линейного ускорения беспилотного летательного аппарата формируется команда управления беспилотным летательным аппаратом. Например, текущая приложенная пользователем внешняя сила считается помеховой внешней силой, если интервал между T3 и T4 меньше второго временного порога, или не считается помеховой внешней силой, если интервал между T3 и T4 равен или больше второго временного порога. Если приложенная пользователем внешняя сила не является помеховой внешней силой, команда управления беспилотным летательным аппаратом, например, команда управления беспилотным летательным аппаратом на прекращение подъема или снижения или команда управления беспилотным летательным аппаратом лететь на текущей линейной скорости, формируется в соответствии с линейной скоростью, получаемой в режиме реального времени. Устанавливая условие тенденции изменения вертикального линейного ускорения, помеха, вызванная внешней силой, и помеха или ошибка, вызванная измерением ускорения, могут быть эффективно исключены. В конкретных реализациях высота беспилотного летательного аппарата в движении может быть измерена устройством, например, модулем GPS, камерой и лазерным датчиком, расположенными на беспилотном летательном аппарате. Сбор данных о текущей высоте беспилотного летательного аппарата может быть осуществлен, используя существующие сопутствующие способы, которые повторно здесь не описываются.
В конкретных реализациях этап формирования команды управления беспилотным летательным аппаратом в соответствии с линейной скоростью, получаемой в режиме реального времени, содержит этапы, на которых: формируют вторую команду для управления беспилотным летательным аппаратом, чтобы лететь с линейной скоростью, получаемой в режиме реального времени, если линейная скорость, полученная в режиме реального времени, больше заданного порога линейной скорости; или формируют третью команду для управления беспилотным летательным аппаратом, чтобы прекратить полет в направлении текущей линейной скорости, если линейная скорость, полученная в режиме реального времени, меньше или равна заданному порогу линейной скорости. Информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, получают в режиме реального времени, когда беспилотный летательный аппарат находится в состоянии зависания или когда беспилотный летательный аппарат, находящийся в состоянии зависания, начинает двигаться под воздействием приложенной пользователем внешней силы. Если полученная информация о состоянии движения содержит линейную скорость беспилотного летательного аппарата, то тогда в варианте осуществления, основываясь на примере включения горизонтальной линейной скорости беспилотного летательного аппарата в линейную скорость, полученную в режиме реального времени, команда управления беспилотным летательным аппаратом формируется в соответствии с линейной скоростью беспилотного летательного аппарата, получаемой в режиме реального времени, после того, как приложенная пользователем внешняя сила определяется как не являющаяся помеховой внешней силой. Например, если горизонтальная линейная скорость беспилотного летательного аппарата, соответствующая второму моменту времени, больше заданного порога линейной скорости, то тогда формируется команда управления беспилотным летательным аппаратом лететь с горизонтальной линейной скоростью беспилотного летательного аппарата, соответствующей второму моменту времени, в противном случае, формируется третья команда управления беспилотным летательным аппаратом, чтобы прекратить полет в направлении текущей линейной скорости, чтобы поддерживать беспилотный летательный аппарат в текущем горизонтальном положении. В случае, когда линейное ускорение, полученное в режиме реального времени, представляется величиной и направлением линейного ускорения беспилотного летательного аппарата, является ли внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, может быть определено напрямую в соответствии с тенденцией изменения величины линейного ускорения беспилотного летательного аппарата; если приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой, то тогда формируется команда управления беспилотным летательным аппаратом лететь обратно в его начальное положение в направлении линейного ускорения, в противном случае, команда управления беспилотным летательным аппаратом формируется в соответствии с линейной скоростью, получаемой в режиме реального времени. При формировании команды управления беспилотным летательным аппаратом в соответствии с линейной скоростью, получаемой в режиме реального времени, если линейная скорость, полученная в режиме реального времени, меньше или равна заданному порогу линейной скорости, формируется третья команда управления беспилотным летательным аппаратом, чтобы прекратить полет в направлении текущей линейной скорости, в противном случае, формируется команда управления беспилотным летательным аппаратом лететь с направлением и величиной линейной скорости, полученными в режиме реального времени.
Тип 2: информация о состоянии движения беспилотного летательного аппарата содержит угловую скорость и угловое ускорение беспилотного летательного аппарата.
Если информация о состоянии движения беспилотного летательного аппарата содержит угловую скорость и угловое ускорение беспилотного летательного аппарата, то тогда этап формирования по меньшей мере одной команды управления беспилотным летательным аппаратом в соответствии с информацией о движении беспилотного летательного аппарата, содержит этапы, на которых: определяют, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, и если "да", то формируют четвертую команду управления ориентацией головной части беспилотного летательного аппарата в начальном направлении головной части беспилотного летательного аппарата, в противном случае, формируют команду управления беспилотным летательным аппаратом в соответствии с угловой скоростью, получаемой в режиме реального времени.
Принимая в качестве примера введение угловой скорости беспилотного летательного аппарата в информацию о состоянии движения, этап определения, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, соответствующей с тенденции изменения угловой скорости, получаемой в режиме реального времени, содержит этап, на котором: определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой, если интервал между пятым моментом времени, в который угловая скорость беспилотного летательного аппарата увеличивается до первого порога угловой скорости, и шестым моментом времени, в который угловая скорость достигает пика, будет меньше третьего временного порога, или определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, не является помеховой внешней силой, если интервал между пятым моментом времени и шестым моментом времени равен или больше третьего временного порога.
Угловая скорость беспилотного летательного аппарата в состоянии зависания равна нулю. Когда пользователь вращает беспилотный летательный аппарат, то беспилотный летательный аппарат начинает вращаться под воздействием внешней силы и вращается с постоянно увеличивающейся скоростью, скорость вращения беспилотного летательного аппарата достигает пика, когда приложенная пользователем внешняя сила исчезает, и затем начинает уменьшаться. Угловая скорость беспилотного летательного аппарата в режиме реального времени может быть получена датчиком угловой скорости, например, гироскопом, установленным на беспилотном летательном аппарате, во время процесса вращения беспилотного летательного аппарата. Угловую скорость беспилотного летательного аппарата получают в режиме реального времени во время процесса, при котором беспилотный летательный аппарат, находящийся в состоянии зависания, начинает вращаться. Сначала, момент времени, в который угловая скорость беспилотного летательного аппарата увеличивается до первого порога угловой скорости, обозначается как T5; затем, угловая скорость беспилотного летательного аппарата постепенно увеличивается и достигает пика, когда приложенная пользователем внешняя сила исчезает, и затем начинает уменьшаться; момент времени, в который угловая скорость беспилотного летательного аппарата достигает пика, то есть, момент времени, в который угловая скорость беспилотного летательного аппарата начинает уменьшаться, обозначается как Т6; наконец, в соответствии с тенденцией изменения угловой скорости беспилотного летательного аппарата формируется команда управления беспилотным летательным аппаратом. Например, текущая приложенная пользователем внешняя сила считается помеховой внешней силой, если интервал между T6 и T5 меньше третьего временного порога, или не считается помеховой внешней силой, если интервал между T6 и T5 равен или больше третьего временного порога. Если текущая приложенная пользователем внешняя сила является помеховой внешней силой, то формируется четвертая команда управления ориентацией головной части беспилотного летательного аппарата в начальном направлении головной части беспилотного летательного аппарата, в противном случае, формируется шестая команда управления беспилотным летательным аппаратом для вращения с угловой скоростью, получаемой в режиме реального времени, чтобы управлять вращением беспилотного летательного аппарата вдоль направления, с которого пользователь прикладывает внешнюю силу.
Угловую скорость беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, получают в режиме реального времени, когда беспилотный летательный аппарат находится в состоянии зависания и когда беспилотный летательный аппарат, находящийся в состоянии зависания, начинает двигаться под воздействием приложенной пользователем внешней силы. После того, как приложенная пользователем внешняя сила определена как внешняя сила, не являющаяся помеховой, этап формирования команды управления беспилотным летательным аппаратом в соответствии с угловой скоростью, получаемой в режиме реального времени, содержит этапы, на которых: формируют пятую команду для управления ориентацией головной части беспилотного летательного аппарата в текущем направлении, если угловая скорость, полученная в режиме реального времени, меньше или равна заданному порогу угловой скорости; или формируют шестую команду для управления вращением беспилотного летательного аппарата с угловой скоростью, получаемой в режиме реального времени, если угловая скорость, полученная в режиме реального времени, больше заданного порога угловой скорости. Например, команда управления вращением беспилотного летательного аппарата с угловой скоростью беспилотного летательного аппарата, соответствующая шестому моменту времени, формируется после того, как угловая скорость вращения беспилотного летательного аппарата, соответствующая шестому моменту времени, получена в режиме реального времени. Устанавливая условие тенденции изменения угловой скорости, помеха, вызванная внешней силой, и помеха или ошибка, вызванная измерением угловой скорости, могут быть эффективно исключены. В конкретных реализациях сбор данных угловой скорости беспилотного летательного аппарата может быть осуществлен, используя существующие сопутствующие способы, которые повторно здесь не описываются.
В случае, когда информация о состоянии движения содержит угловое ускорение беспилотного летательного аппарата, этап определения, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, соответствующей тенденции изменения углового ускорения, полученного в режиме реального времени, содержит этап, на котором: определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой, если интервал между седьмым моментом времени, в который угловое ускорение беспилотного летательного аппарата увеличивается до первого порога углового ускорения, и восьмым моментом времени, в который пиковое угловое ускорение беспилотного летательного аппарата уменьшается до первого порога углового ускорения, будет меньше четвертого временного порога, или определяют, что приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, не является помеховой внешней силой, если интервал между седьмым моментом времени и восьмым моментом времени равен или больше четвертого временного порога. Процесс определения, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, соответствующей тенденции изменения углового ускорения беспилотного летательного аппарата, может быть понятен при обращении к процессу определения, является ли приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, помеховой внешней силой, соответствующей тенденции изменения линейного ускорения беспилотного летательного аппарата, и поэтому здесь повторно не описывается.
В конкретных реализациях первый и второй временные пороги могут устанавливаться в соответствии с определяемой пользователем чувствительностью управления. В конкретных реализациях первый и второй порог ускорения и порог угловой скорости могут также устанавливаться в соответствии с определяемой пользователем чувствительностью управления. Например, первый временной порог может быть установлен выше 200 мс, а первый порог ускорения может быть установлен равным 0,2g, где g - ускорение свободного падения. Заданный порог линейной скорости может быть равен нулю или значению больше нуля, в зависимости от требования пользователя к чувствительности управления.
Этап 230: управляют беспилотным летательным аппаратом в соответствии по меньшей мере с одной командой управления беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие.
Поскольку тенденция движения беспилотного летательного аппарата при приложении пользователем внешней силы к беспилотному летательному аппарату изменяется по величине или по направлению, то по меньшей мере одна команда управления беспилотным летательным аппаратом может быть сформирована, основываясь на информации о состоянии движения беспилотного летательного аппарата. В варианте осуществления команды управления беспилотным летательным аппаратом, сформированные на приведенных выше этапах, содержат, не ограничиваясь только этим: первую команду управления беспилотным летательным аппаратом лететь обратно к его начальному положению, команду управления беспилотным летательным аппаратом лететь с определенной линейной скоростью, команду управления беспилотным летательным аппаратом прекратить полет с определенной линейной скоростью, команду управления беспилотным летательным аппаратом зависнуть, команду управления беспилотным летательным аппаратом оставаться в текущем положении, команду управления ориентацией головной части беспилотного летательного аппарата в начальном направлении головной части беспилотного летательного аппарата и команду управления беспилотным летательным аппаратом для вращения с определенной угловой скоростью.
В конкретных реализациях каждая из команд посылается на модуль управления полетом, расположенный на беспилотном летательном аппарате, чтобы управлять беспилотным летательным аппаратом для выполнения соответствующего полетного действия под влиянием приложенной пользователем внешней силы. Как управлять беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие согласно по меньшей мере команде управления беспилотным летательным аппаратом, может быть реализовано, используя существующие технологии, которые повторно здесь не описываются.
В соответствии с командой управления полетом, сформированной на этапе 220, беспилотный летательный аппарат выполняет полетное действие в соответствии с приложенной пользователем внешней силой, например, под воздействием горизонтальной толкающей/тянущей силы беспилотный летательный аппарат летит горизонтально вдоль направления внешней силы; под воздействием вращающей внешней силы беспилотный летательный аппарат летит с вращением вдоль направления внешней силы; под воздействием вертикальной внешней силы беспилотный летательный аппарат поднимается или снижается до определенной высоты вдоль направления внешней силы; и под воздействием горизонтальной толкающей/тянущей силы и вращающей внешней силы беспилотный летательный аппарат летит горизонтально и с вращением вдоль направления горизонтальной внешней силы.
Информацию о состоянии полета беспилотного летательного аппарата получают в режиме реального времени, когда беспилотный летательный аппарат летит под воздействием приложенной пользователем внешней силы, так чтобы в режиме реального времени получать линейную скорость, угловую скорость, линейное ускорение, текущее положение и другую информацию о состоянии полета беспилотного летательного аппарата, и по меньшей мере одна команда управления беспилотным летательным аппаратом формируется, основываясь на информации о состоянии движения, получаемой в режиме реального времени. В конкретных реализациях информация о состоянии полета беспилотного летательного аппарата может быть получена, используя существующие сопутствующие способы, которые повторно здесь не описываются.
Управляя беспилотным летательным аппаратом для выполнения соответствующего полетного действия под влиянием приложенной пользователем внешней силы, можно реализовать больше полетных действий, например, беспилотный летательный аппарат может управляться так, чтобы лететь с постепенно уменьшающейся линейной скоростью в ответ на приложенную пользователем внешнюю силу, или вращаться с постепенно уменьшающейся угловой скоростью или лететь с вращением с постепенно уменьшающейся линейной скоростью и постепенно уменьшающейся угловой скоростью. В конкретных реализациях во время процесса, когда беспилотный летательный аппарат летит в соответствии со второй командой управления беспилотным летательным аппаратом с линейной скоростью, получаемой в режиме реального времени, способ дополнительно содержит этапы, на которых: постепенно уменьшают линейную скорость беспилотного летательного аппарата, полученную в режиме реального времени, используя первый коэффициент затухания, основываясь на каждом заданном периоде; и формируют вторую команду для управления беспилотным летательным аппаратом для полета с постепенно уменьшающейся линейной скоростью. В конкретных реализациях заданный период может быть равен 30 мс, то есть, линейная скорость беспилотного летательного аппарата, получаемая в режиме реального времени, постепенно уменьшается каждые 30 мс. Если линейная скорость беспилотного летательного аппарата, получаемая в реальном времени, больше первого порога линейной скорости, то линейная скорость постепенно уменьшается с первым коэффициентом затухания и формируется вторая команда управления беспилотным летательным аппаратом, чтобы лететь с постепенно уменьшающейся линейной скоростью, в противном случае, формируется третья команда управления беспилотным летательным аппаратом, чтобы прекратить полет в направлении текущей линейной скорости.
В конкретных реализациях скорость, с которой уменьшается линейная скорость беспилотного летательного аппарата, имеет фиксированное значение, устанавливаемое пользователем, или устанавливаемое заранее, причем, чем больше коэффициент затухания, тем быстрее уменьшается линейная скорость. Чем меньше коэффициент затухания, тем медленнее уменьшается линейная скорость. Чем больше приложенная пользователем внешняя сила, тем дальше летит беспилотный летательный аппарат. Чем меньше приложенная пользователем внешняя сила, тем меньшее расстояние пролетает беспилотный летательный аппарат. Линейную скорость V беспилотного летательного аппарата получают в режиме реального времени, когда беспилотный летательный аппарат находится под воздействием приложенной пользователем внешней силы, и полученная линейная скорость постепенно уменьшается с заданным первым коэффициентом затухания, когда линейная скорость V больше первого порога Vth линейной скорости. Принимая в качестве примера полученную в режиме реального времени линейную скорость V, если первый коэффициент затухания установлен равным a1, то тогда уменьшающаяся линейная скорость может равняться (V- a1*t), где t представляет заданный период. Беспилотный летательный аппарат управляется так, чтобы лететь со скоростью (V- a1*t). Беспилотный летательный аппарат управляется так, чтобы оставаться в текущем положении, когда линейная скорость V беспилотного летательного аппарата меньше или равна первому порогу Vth линейной скорости. Первый порог Vth. линейной скорости может быть равен 10 см/с. Линейная скорость беспилотного летательного аппарата, которая меньше или равна первому порогу Vth линейной скорости, указывает, что беспилотный летательный аппарат столкнулся с препятствием или захвачен пользователем или что линейная скорость не может больше уменьшаться.
Во время процесса, когда беспилотный летательный аппарат вращается в соответствии с шестой командой управления беспилотным летательным аппаратом для вращения с угловой скоростью, получаемой в режиме реального времени, с линейной скоростью, получаемой в режиме реального времени, способ дополнительно содержит этапы, на которых: постепенно уменьшают, используя второй коэффициент затухания, угловую скорость беспилотного летательного аппарата, получаемую в режиме реального времени на каждом заданном периоде; и формируют шестую команду для управления беспилотным летательным аппаратом для вращения с постепенно уменьшающейся угловой скоростью. В конкретных реализациях заданный период может быть равен 30 мс или быть меньше 30 мс, то есть, угловая скорость беспилотного летательного аппарата, получаемая в режиме реального времени, постепенно уменьшается каждые 30 мс. Если угловая скорость беспилотного летательного аппарата, получаемая в реальном времени, больше второго порога угловой скорости, то угловая скорость постепенно уменьшается со вторым коэффициентом затухания и формируется команда управления беспилотным летательным аппаратом, чтобы лететь с постепенно уменьшающейся угловой скоростью, в противном случае, формируется команда управления ориентацией головной части беспилотного летательного аппарата в начальном направлении или формируется пятая команда управления ориентацией головной части беспилотного летательного аппарата в текущем направлении.
Аналогично, скорость, с которой уменьшается угловая скорость, имеет фиксированное значение, устанавливаемое пользователем или устанавливаемое заранее, причем чем больше коэффициент затухания, тем быстрее уменьшается угловая скорость. Угловую скорость ω беспилотного летательного аппарата получают в режиме реального времени, когда беспилотный летательный аппарат летит под воздействием приложенной пользователем внешней силы, и полученная угловая скорость постепенно уменьшается в соответствии с заданным вторым коэффициентом затухания a2, когда угловая скорость ω больше второго порога ωth угловой скорости, постепенно уменьшающаяся угловая скорость может быть равна (ω - a2*t) и затем беспилотный летательный аппарат управляется так, чтобы лететь вращательно со скоростью (ω - a2*t). Беспилотным летательным аппаратом управляют, чтобы остановить вращение, когда угловая скорость ω меньше или равна второму порогу ωth угловой скорости. Второй порог ωth угловой скорости может быть равен 3 °/с. Угловая скорость беспилотного летательного аппарата, которая меньше или равна второму порогу ωth угловой скорости, указывает, что беспилотный летательный аппарат столкнулся с препятствием или захвачен пользователем или что угловая скорость не может больше уменьшаться.
В конкретных реализациях, если беспилотный летательный аппарат летит линейно с определенной линейной скоростью и синхронно летит с вращением с определенной угловой скоростью, то тогда коэффициент затухания угловой скорости беспилотного летательного аппарата может быть определен в соответствии с начальной линейной скоростью беспилотного летательного аппарата и коэффициентом затухания линейной скорости, так чтобы линейная скорость и угловая скорость беспилотного летательного аппарата одновременно уменьшались до 0. Например, второй коэффициент затухания определяется в соответствии с линейной скоростью беспилотного летательного аппарата, соответствующей второму моменту времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата уменьшается до первого порога ускорения, первый коэффициент затухания и угловая скорость беспилотного летательного аппарата, соответствуют четвертому моменту времени, в который угловая скорость беспилотного летательного аппарата увеличивается до пикового значения. Если начальная линейная скорость беспилотного летательного аппарата равна V0 и первый коэффициент затухания равен a0, то тогда время t, необходимое для уменьшения линейной скорости беспилотного летательного аппарата от начального значения V0 до 0, может быть вычислено, используя следующую формулу: t=V0/a0; и если начальная угловая скорость вращения беспилотного летательного аппарата равна ω0 в второй коэффициент затухания равен ω0/t, то тогда угловая скорость беспилотного летательного аппарата уменьшается до 0, когда уменьшается до 0 линейная скорость беспилотного летательного аппарата.
Беспилотный летательный аппарат может управляться более чем одним пользователем, чтобы выполнять соответствующие полетные действия под воздействием приложенных пользователями внешних сил, например, после толкания ко второму пользователю от первого пользователя беспилотный летательный аппарат зависает, когда его линейная скорость уменьшается до первого порога линейной скорости, и затем выполняет соответствующее полетное действие под влиянием внешней силы, приложенной вторым пользователем. В конкретных реализациях, если второй пользователь прикладывает внешнюю силу к летящему беспилотному летательному аппарату, когда уменьшенная линейная скорость беспилотного летательного аппарата неспособна достигнуть первого порога линейной скорости, то тогда беспилотный летательный аппарат выполняет соответствующее действие под влиянием внешней силы, приложенной вторым пользователем. Альтернативно, скорость беспилотного летательного аппарата падает до 0, когда беспилотный летательный аппарат захвачен вторым пользователем во время процесса, в котором беспилотный летательный аппарат находится в движении при его направлении от первого пользователя ко второму, то есть, когда скорость беспилотного летательного аппарата неспособно уменьшиться для первого порога линейной скорости. Затем формируется команда управления беспилотным летательным аппаратом зависнуть, чтобы беспилотный летательный аппарат завис в текущем положении; если второй пользователь прикладывает внешнюю силу в направлении движения беспилотного летательного аппарата, то беспилотный летательный аппарат движется вдоль направления внешней силы, приложенной вторым пользователем, под воздействием внешней силы, приложенной вторым пользователем, в этом случае ускорение и линейная скорость, которые по направлению идентичны направлению внешней силы, приложенной вторым пользователем, могут быть получены и тогда формируют команду управления беспилотным летательным аппаратом для полета с текущей линейной скоростью.
В другом варианте осуществления представленного раскрытия беспилотный летательный аппарат может управляться для выполнения полетного действия, моделирующего движение бумеранга. Способ управления беспилотным летательным аппаратом содержит этап, на котором перед этапом получения в режиме реального времени информации о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, устанавливают режим полета беспилотного летательного аппарата, который должен быть режимом бумеранга. Режим бумеранга относится к режиму, в котором беспилотный летательный аппарат начинает полет под воздействием приложенной пользователем внешней силы, летит вдоль направления приложенной пользователем внешней силы с постепенно уменьшающейся скоростью и затем возвращается обратно в начальное положение беспилотного летательного аппарата, когда скорость беспилотного летательного аппарата уменьшается до заданного порога. Этап формирования команды управления беспилотным летательным аппаратом в соответствии с линейной скоростью, полученной в режиме реального времени, содержит этапы, на которых: формируют первую команду управления беспилотным летательным для полета обратно в его начальное положение, если линейная скорость беспилотного летательного аппарата, полученная в режиме реального времени, меньше или равна заданному порогу линейной скорости и режимом полета беспилотного летательного аппарата является режим бумеранга. В конкретных реализациях во время процесса, когда беспилотный летательный аппарат летит в соответствии со второй командой управления беспилотным летательным аппаратом с линейной скоростью, полученной в режиме реального времени, линейная скорость, беспилотного летательного аппарата, полученная в режиме реального времени, уменьшаетсяв соответствии с первым коэффициентом затухания на каждом заданном периоде. Затем для уменьшенной линейной скорости беспилотного летательного аппарата делается определение, причем, если уменьшенная линейная скорость беспилотного летательного аппарата меньше или равна заданному порогу линейной скорости и режимом полета беспилотного летательного аппарата является режим бумеранга, то тогда формируется первая команда управления беспилотным летательным аппаратом, чтобы лететь обратно в его начальное положение, в котором начальное положение относится к положению, в котором беспилотный летательный аппарат зависал последний раз; и если уменьшенная линейная скорость меньше или равна заданному порогу линейной скорости, но режим полета не является режимом бумеранга, формируется третья команда управления беспилотным летательным аппаратом, чтобы прекратить полет вдоль направления текущей линейной скорости; и если уменьшенная линейная скорость больше заданного порога линейной скорости, то тогда формируется вторая команда управления беспилотным летательным аппаратом для полета на уменьшенной линейной скорости. Если беспилотный летательный аппарат летит на текущей линейной скорости и синхронно вращается с определенной угловой скоростью, то угловая скорость беспилотного летательного аппарата после того, как она получена, уменьшается с третьим коэффициентом затухания, когда полученная угловая скорость больше второго порога угловой скорости, и формируется команда управления беспилотным летательным аппаратом, чтобы лететь с уменьшенной угловой скоростью, или формируется команда управления ориентацией головной части беспилотного летательного аппарата в начальном направлении головной части беспилотного летательного аппарата или в текущем направлении, когда полученная угловая скорость не больше второго порога угловой скорости.
Например, если пользователь прикладывает горизонтальную внешнюю силу к беспилотному летательному аппарату в состоянии зависания и синхронно вращает беспилотный летательный аппарат, то тогда беспилотный летательный аппарат быстро движется в направлении горизонтальной внешней силы и синхронно вращается с определенной угловой скоростью под воздействием горизонтальной внешней силы. Линейную скорость V беспилотного летательного аппарата получают в режиме реального времени, когда беспилотный летательный аппарат летит под воздействием приложенной пользователем внешней силы, и полученная линейная скорость постепенно уменьшается с заданным первым коэффициентом затухания, когда линейная скорость V больше первого порога Vth линейной скорости. Принимая в качестве примера полученную в режиме реального времени линейную скорость V, если первый коэффициент затухания установлен равным a1, то тогда уменьшающаяся линейная скорость может равняться (V - a1*t). Далее, беспилотный летательный аппарат управляется так, чтобы лететь со скоростью (V - a1*t). Беспилотный летательный аппарат управляется так, чтобы лететь обратно в его начальное положение, то есть, лететь вдоль направления, противоположного направлению приложенной пользователем внешней силы, чтобы вернуться в положение, в котором беспилотный летательный аппарат зависал последний раз, когда линейная скорость V беспилотного летательного аппарата меньше или равна первому порогу Vth линейной скорости. Беспилотный летательный аппарат может управляться так, чтобы лететь обратно в его начальное положение при неизмененной скорости или, первоначально, с линейной скоростью беспилотного летательного аппарата, соответствующей моменту времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата уменьшается до первого порога ускорения и затем с постепенно уменьшающейся линейной скоростью, которая вычисляется, уменьшая начальную линейную скорость с использованием первого коэффициента затухания. При этом, угловую скорость ω беспилотного летательного аппарата получают в режиме реального времени и полученная угловая скорость уменьшается в соответствии с заданным третьим коэффициентом затухания a3, когда угловая скорость ω больше второго порога ωth угловой скорости, уменьшающаяся угловая скорость может быть равна (ω - a3*t), и затем беспилотный летательный аппарат летит с вращением со скоростью (ω - a3*t) до тех пор, его угловая скорость не станет ниже второго порога угловой скорости. В конкретных реализациях третий коэффициент затухания определяется в соответствии с линейной скоростью беспилотного летательного аппарата, соответствующей моменту времени, в который горизонтальное линейное ускорение беспилотного летательного аппарата уменьшается до первого порога ускорения с первым коэффициентом затухания, угловая скорость беспилотного летательного аппарата, соответствующая моменту времени, в который угловая скорость беспилотного летательного аппарата увеличивается до пикового значения, и беспилотный летательный аппарат с линейной скоростью возвращается обратно в его начальное положение. В конкретных реализациях первый коэффициент затухания лежит ниже начальной линейной скорости беспилотного летательного аппарата, соответствующей моменту времени, в который внешняя сила исчезает, и второй коэффициент затухания лежит ниже начального линейного ускорения беспилотного летательного аппарата, соответствующего моменту времени, в который исчезает внешняя сила. Здесь не задаются никакие ограничения на установку коэффициентов затухания линейной скорости и угловой скорости беспилотного летательного аппарата в состоянии полета.
В конкретных реализациях, режимы полета беспилотного летательного аппарата могут быть установлены, чтобы управлять полетными действиями, которые беспилотный летательный аппарат выполняет под воздействием приложенной пользователем внешней силы. Например, в случае, когда режим полета беспилотного летательного аппарата установлен как режим бумеранга, если пользователь прикладывает относительно большую внешнюю силу к беспилотному летательному аппарату, то затем беспилотный летательный аппарат летит с постепенно уменьшающейся скоростью под воздействием приложенной пользователем внешней силы до тех пор, пока его скорость не уменьшится до первого порога линейной скорости и затем беспилотный летательный аппарат летит обратно в его начальное положение с постепенно увеличивающейся линейной скоростью или с неизменной скоростью. В случае, когда режим полета беспилотного летательного аппарата установлен как режим дрейфа, если пользователь прикладывает относительно большую внешнюю силу к беспилотному летательному аппарату, то затем беспилотный летательный аппарат летит с постепенно уменьшающейся скоростью под воздействием приложенной пользователем внешней силы до тех пор, пока его скорость не уменьшится до первого порога линейной скорости и затем беспилотный летательный аппарат зависает в текущем положении. То есть, когда беспилотный летательный аппарат летит под воздействием приложенной пользователем внешней силы, линейная скорость и угловая скорость летящего беспилотного летательного аппарата могут контролироваться в реальном времени в соответствии с установленным режима полета
Во время процесса управления беспилотным летательным аппаратом этот беспилотный летательный аппарат движется под воздействием приложенной пользователем внешней силы, информацию о состоянии движения, например, линейное ускорение, линейная скорость и угловая скорость беспилотного летательного аппарата, получают в режиме реального времени и команду управления беспилотным летательным аппаратом формируют в соответствии с полученной информацией о состоянии движения.
Заданный период, заданный порог скорости, порог ускорения и временной порог, упомянутые здесь, могут устанавливаться опытным путем в управляющей программе заранее или устанавливаться пользователем на рабочем интерфейсе беспилотного летательного аппарата по мере необходимости, перед тем, как пользователь управляет беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие, и для установки упомянутых здесь порогов и периодов не задаются никакие ограничения.
Получая (или собирая) в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, и управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие согласно по меньшей мере одной команде управления беспилотным летательным аппаратом, причем способ управления беспилотным летательным аппаратом, раскрытый здесь, решает проблему, заключающуюся в том, что существующие способы управления беспилотным летательным аппаратом, которые требуют от пользователя беспилотного летательного аппарата, по меньшей мере, освоения технологии управления по высоким стандартам, неприменимы для обычных пользователей. После того, как беспилотный летательный аппарат движется под воздействием приложенной пользователем внешней силы, в раскрытом здесь способе управления дополнительно управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие в соответствии с текущей тенденцией движения беспилотного летательного аппарата, освобождая, таким образом, пользователя от освоения сложной технологией управления беспилотным летательным аппаратом, снижая трудности управления беспилотным летательным аппаратом и создавая более приемлемый беспилотный летательный аппарат. Более того, раскрытые здесь способ и устройство позволяют управлять одним и тем же беспилотным летательным аппаратом нескольким пользователям, тем самым, повышая оперативность и управляемость беспилотного летательного аппарата.
Вариант 3 осуществления
Как показано на фиг. 3, представляется устройство управления беспилотным летательным аппаратом, содержащее:
модуль 310 получения информации о состоянии движения, выполненный с возможностью получения в режиме реального времени информации о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы;
модуль 320 формирования команды управления, выполненный с возможностью формирования по меньшей мере одной команды управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, полученной модулем 310 получения информации о состоянии движения; и
модуль 330 управления полетом, выполненный с возможностью управления беспилотным летательным аппаратом, чтобы осуществлять соответствующее полетное действие согласно по меньшей мере одной команде управления беспилотным летательным аппаратом, сформированной модулем 320 формирования команды управления.
Как вариант, согласно показанному на фиг. 4, устройство управления беспилотным летательным аппаратом дополнительно содержит:
модуль 300 получения информации о состоянии зависания, выполненный с возможностью получения информации о состоянии зависания беспилотного летательного аппарата, в котором
информация о состоянии зависания содержит начальное положение беспилотного летательного аппарата и начальное направление головной части беспилотного летательного аппарата, где начальное положение беспилотного летательного аппарата содержит начальное горизонтальное положение и начальную высоту беспилотного летательного аппарата. Уникальное начальное горизонтальное положение беспилотного летательного аппарата может быть определено, используя начальное горизонтальное положение и начальную высоту беспилотного летательного аппарата, а начальным направлением головной части беспилотного летательного аппарата является направление головной части беспилотного летательного аппарата в состоянии зависания. В реализациях начальное положение беспилотного летательного аппарата может быть представлено с помощью координат GPS.
Как вариант, информация о состоянии движения содержит линейное ускорение и линейную скорость беспилотного летательного аппарата и, как показано на фиг. 4, модуль 320 формирования команды управления содержит:
первый блок 3201 определения приложенной пользователем внешней силы, выполненный с возможностью определения, в соответствии с тенденцией изменения линейного ускорения беспилотного летательного аппарата, полученного в режиме реального времени, является ли помеховой внешней силой та приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение;
первый блок 3202 обработки помехи, выполненный с возможностью формирования первой команды управления беспилотным летательным аппаратом, чтобы лететь обратно в его начальное положение, если приложенная пользователем внешняя сила является помеховой внешней силой; и
первый блок 3203 реакции на внешнюю силу, выполненный с возможностью формирования команды управления беспилотным летательным аппаратом в соответствии с линейной скоростью беспилотного летательного аппарата, полученной в режиме реального времени, если приложенная пользователем внешняя сила не является помеховой внешней силой.
Устанавливая условие тенденции изменения линейного ускорения беспилотного летательного аппарата, помеха, вызванная внешней силой, и помеха или ошибка, вызванная измерением ускорения, могут быть эффективно исключены.
Как вариант, согласно показанному на фиг. 4, первый блок 3203 реакции на внешнюю силу содержит:
первый субблок 32031 формирования команды управления, выполненный с возможностью формирования второй команды управления беспилотным летательным аппаратом для полета с линейной скоростью, полученной в режиме реального времени, если линейная скорость, полученная в режиме реального времени, больше заданного порога линейной скорости; и
второй субблок 32032 формирования команды управления, выполненный с возможностью формирования третьей команды управления беспилотным летательным аппаратом для прекращения полета в направлении текущей линейной скорости, если линейная скорость, полученная в режиме реального времени, меньше или равна заданному порогу линейной скорости.
Как вариант, во время процесса, когда беспилотный летательный аппарат летит в соответствии с командой, сформированной вторым субблоком 32032 формирования команды управления, первый блок 3203 реакции на внешнюю силу дополнительно содержит:
блок 32033 уменьшения линейной скорости, выполненный с возможностью уменьшения, используя первый коэффициент затухания, линейной скорости беспилотного летательного аппарата, полученной модулем 310 получения информации о состоянии движения в режиме реального времени каждый заданный период; и
третий субблок 32034 формирования команды управления, выполненный с возможностью формирования второй команды управления беспилотным летательным аппаратом для полета с уменьшенной линейной скоростью.
Как вариант, информация о состоянии движения беспилотного летательного аппарата содержит угловое ускорение и угловую скорость беспилотного летательного аппарата и, как показано на фиг. 4, модуль 320 формирования команды управления дополнительно содержит:
второй блок 3204 определения приложенной пользователем внешней силы, выполненный с возможностью определения, в соответствии с тенденцией изменения угловой скорости или углового ускорения беспилотного летательного аппарата, полученной в режиме реального времени, является ли помеховой внешней силой та приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение;
второй блок 3205 обработки помехи, выполненный с возможностью формирования четвертой команды для управления ориентацией головной части беспилотного летательного аппарата в начальном направлении головной части беспилотного летательного аппарата, если приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, является помеховой внешней силой; и
второй блок 3206 реакции на внешнюю силу, выполненный с возможностью формирования команды управления беспилотным летательным аппаратом в соответствии с угловой скоростью, полученной в режиме реального времени, если приложенная пользователем внешняя сила, под воздействием которой беспилотный летательный аппарат начинает движение, не является помеховой внешней силой.
Устанавливая условие тенденции изменения линейной скорости и угловой скорости беспилотного летательного аппарата, помеха, вызванная внешней силой, и помеха или ошибка, вызванная измерением ускорения, могут быть эффективно исключены.
Как вариант, согласно показанному на фиг. 4, второй блок 3206 реакции на внешнюю силу содержит:
пятый субблок 32061 формирования команды управления, выполненный с возможностью формирования пятой команды управления ориентацией головной части беспилотного летательного аппарата в текущем направлении, если угловая скорость, полученная в режиме реального времени, меньше или равна заданному порогу угловой скорости; и
шестой субблок 32062 формирования команды управления, выполненный с возможностью формирования шестой команды управления беспилотным летательным аппаратом для вращения с угловой скоростью, полученной в режиме реального времени, если угловая скорость, полученная в режиме реального времени, больше заданного порога угловой скорости.
Как вариант, во время процесса, когда беспилотный летательный аппарат вращается в соответствии с шестой командой управления беспилотным летательным аппаратом для вращения с угловой скоростью, получаемой в режиме реального времени, второй блок 3206 реакции на внешнюю силу дополнительно содержит:
блок 32063 уменьшения угловой скорости, выполненный с возможностью уменьшения, используя второй коэффициент затухания, угловой скорости беспилотного летательного аппарата, полученной модулем 310 получения информации о состоянии движения в режиме реального времени каждый заданный период; и
седьмой субблок 32064 формирования команды управления, выполненный с возможностью формирования шестой команды управления беспилотным летательным аппаратом для полета с уменьшенной угловой скоростью.
В варианте осуществления представленного раскрытия информация о состоянии движения описывается, основываясь на линейном движении и вращательном движении. Информация о состоянии движения беспилотного летательного аппарата содержит: линейное ускорение, линейную скорость и положение беспилотного летательного аппарата в реальном времени; и информация о состоянии движения беспилотного летательного аппарата, выполняющего вращательное действие, содержит: угловую скорость и угловое ускорение беспилотного летательного аппарата и текущее направление головной части беспилотного летательного аппарата. Когда беспилотный летательный аппарат выполняет линейное действие и вращательное действие синхронно, информация о состоянии движения беспилотного летательного аппарата содержит: линейное ускорение, линейную скорость, угловую скорость, угловое ускорение и положение беспилотного летательного аппарата в реальном времени и текущее направление головной части беспилотного летательного аппарата. В конкретных реализациях сопутствующая информация о линейном движении может обрабатываться первым блоком 3201 определения приложенной пользователем внешней силы, первым блоком 3202 обработки помехи и первым блоком 3203 реакции на внешнюю силу, чтобы сформировать команду управления линейным движением, и сопутствующая информация о вращательном движении может обрабатываться вторым блоком 3204 определения приложенной пользователем внешней силы, вторым блоком 3205 обработки помехи и вторым блоком 3206 реакции на внешнюю силу, чтобы сформировать команду управления вращательным движением.
Как вариант, согласно показанному на фиг. 5, устройство управления беспилотным летательным аппаратом дополнительно содержит:
модуль 340 установки режима полета, выполненный с возможностью установки режима полета беспилотного летательного аппарата как режима бумеранга, в котором
первый блок 3203 реакции на внешнюю силу дополнительно содержит:
четвертый субблок 32035 формирования команды управления, выполненный с возможностью формирования первой команды управления беспилотным летательным аппаратом для полета обратно в его начальное положение, если линейная скорость беспилотного летательного аппарата, полученная в режиме реального времени, меньше или равна заданному порогу линейной скорости и режимом полета беспилотного летательного аппарата является режим бумеранга. В реализациях режимы полета беспилотного летательного аппарата могут быть установлены для управления полетными действиями, которые беспилотный летательный аппарат выполняет под воздействием приложенной пользователем внешней силы. Например, в случае, когда режим полета беспилотного летательного аппарата установлен как режим бумеранга, если пользователь прикладывает относительно большую внешнюю силу к беспилотному летательному аппарату, то затем беспилотный летательный аппарат летит с постепенно уменьшающейся скоростью под воздействием приложенной пользователем внешней силы до тех пор, пока его скорость не уменьшится до первого порога линейной скорости и затем летит обратно в его начальное положение с постепенно увеличивающейся линейной скоростью или с неизменной скоростью. В случае, когда режим полета беспилотного летательного аппарата установлен как режим дрейфа и если пользователь прикладывает относительно большую внешнюю силу к беспилотному летательному аппарату, то затем беспилотный летательный аппарат летит с постепенно уменьшающейся скоростью под воздействием приложенной пользователем внешней силы до тех пор, пока его скорость не уменьшится до первого порога линейной скорости, и затем прекращает полет в направлении текущей скорости. То есть, когда беспилотный летательный аппарат летит под воздействием приложенной пользователем внешней силы, линейная скорость и угловая скорость летящего беспилотного летательного аппарата могут управляться в режиме реального времени в соответствии с установленным режимом полета беспилотного летательного аппарата, так что беспилотный летательный аппарат выполняет полетное действие в соответствии с внешней силой.
Получая (или собирая) в режиме реального времени информацию о состоянии движения беспилотного летательного аппарата, движущегося под воздействием приложенной пользователем внешней силы, формируют по меньшей мере одну команду управления беспилотным летательным аппаратом, основываясь на информации о состоянии движения, и управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие согласно по меньшей мере одной команде управления беспилотным летательным аппаратом, причем устройство управления беспилотным летательным аппаратом, раскрытое здесь, решает проблему, заключающуюся в том, что существующие способы управления беспилотным летательным аппаратом, которые требуют от пользователя беспилотного летательного аппарата, по меньшей мере, освоения технологии управления по высоким стандартам, неприменимы для обычных пользователей. После того, как беспилотный летательный аппарат движется под воздействием приложенной пользователем внешней силы, в раскрытом здесь способе управления дополнительно управляют беспилотным летательным аппаратом, чтобы выполнить соответствующее полетное действие в соответствии с текущей тенденцией движения беспилотного летательного аппарата, освобождая, таким образом, пользователя от освоения сложной технологией управления беспилотным летательным аппаратом, снижая трудности управления беспилотным летательным аппаратом и создавая более приемлемый беспилотный летательный аппарат. Более того, раскрытое здесь устройство позволяют управлять одним и тем же беспилотным летательным аппаратом нескольким пользователям, тем самым, повышая оперативность и управляемость беспилотного летательного аппарата.
Варианты осуществления раскрытого здесь устройства соответствуют раскрытому здесь способу т, таким образом, конкретные формы реализации модулей в вариантах осуществления устройства могут рассматриваться со ссылкой на варианты осуществления раскрытого здесь способа и поэтому повторно здесь не описываются.
Соответственно, раскрывается беспилотный летательный аппарат, который снабжается по меньшей мере одним измерителем ускорения, таким как датчик ускорения или гироскоп, по меньшей мере одним измерителем скорости, таким как модуль GPS, модулем управления полетом, центральным процессором и памятью, причем память выполнена с возможностью хранения программ для выполнения способов управления беспилотным летательным аппаратом, описанных в вариантах 1 и 2 осуществления, а центральный процессор, который содержит каждый модуль и каждый блок, описанные в варианте 3 осуществления, исполняет программы, хранящиеся в памяти, чтобы выполнять этапы способов управления беспилотным летательным аппаратом, описанные в вариантах 1 и 2 осуществления.
Специалисты в данной области техники должны понимать, что блоки, алгоритмы и этапы, содержащиеся в вариантах осуществления представленного раскрытия, могут быть реализованы посредством аппаратных средств, программного обеспечения или их сочетания. Реализовывать ли эти функции посредством аппаратных средств или программного обеспечения, зависит от применения технического решения и конструктивных ограничений. Реализация тех же самых функций специалистами в данной области техники, используя другие способы, должна попадать в объем защиты представленного раскрытия.
Специалисты в данной области техники должны понимать, что отдельные элементы, содержащиеся в вариантах осуществления представленного раскрытия, могут быть или не быть физически разделенными или располагаться в одном и том же месте или быть распределены по множеству сетевых блоков. Более того, функциональные блоки, содержащиеся в вариантах осуществления представленного раскрытия, могут быть интегрированы в блоке обработки или существовать физически отдельно или в одном блоке могут быть интегрированы две или более этих функций.
Эти функции, когда реализуются как блоки программного обеспечения или продаются или используются как независимые продукты, могут храниться на считываемом компьютером носителе запоминающего устройства. Основанные на оценке технические решения представленного раскрытия могут быть реализованы как программные продукты, которые могут храниться на носителе запоминающего устройства и которые содержат множество команд для выполнения части или всех этапов описанных здесь способов на одном компьютерном устройстве (например, на персональном компьютере, сервере или сетевом устройстве).
Носитель запоминающего устройства может быть U-диском, мобильным дисководом жесткого диска, ROM, RAM, дискетой, компакт-диском или другим носителем, способным хранить управляющие программы.
При том, что здесь были описаны конкретные варианты осуществления, эти варианты осуществления не предназначены ограничивать объем защиты представленного раскрытия. Конечно, любое преобразование или замена, которые могут быть предложены специалистами в данной области техники, не отступая от сущности раскрытий и без приложения творческих усилий, должны попадать в объем защиты представленного раскрытия, который определяется приложенной формулой изобретения.
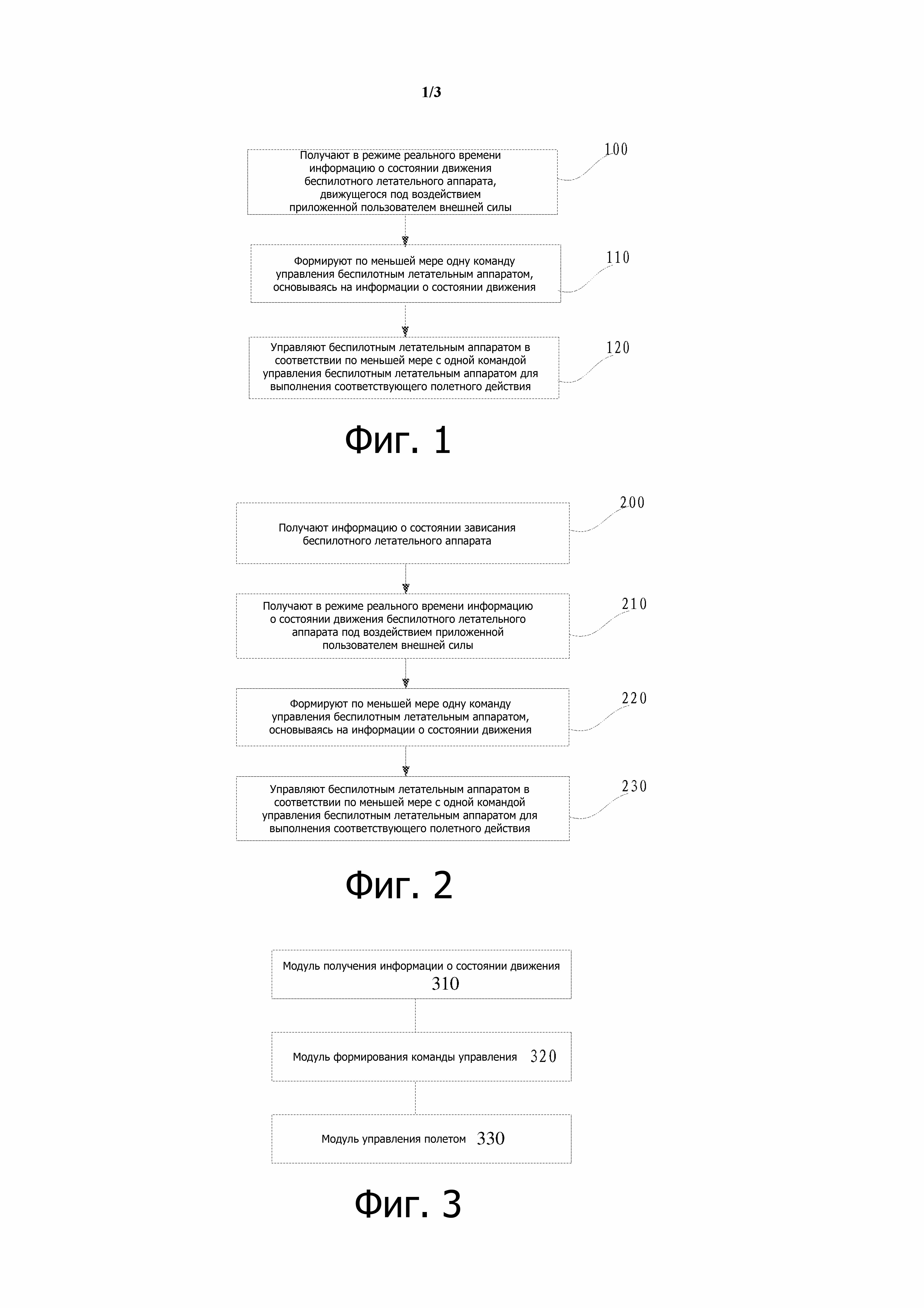
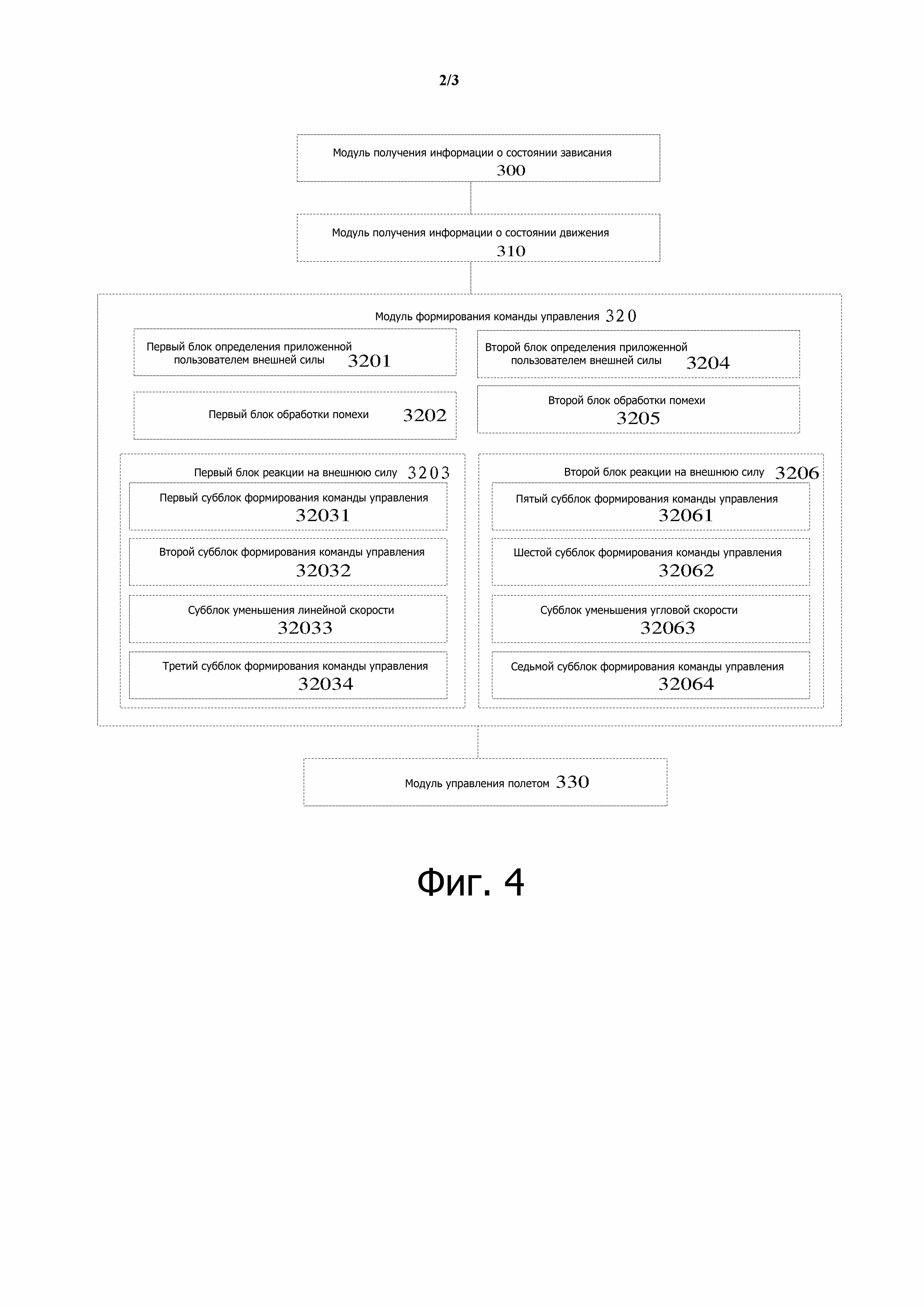
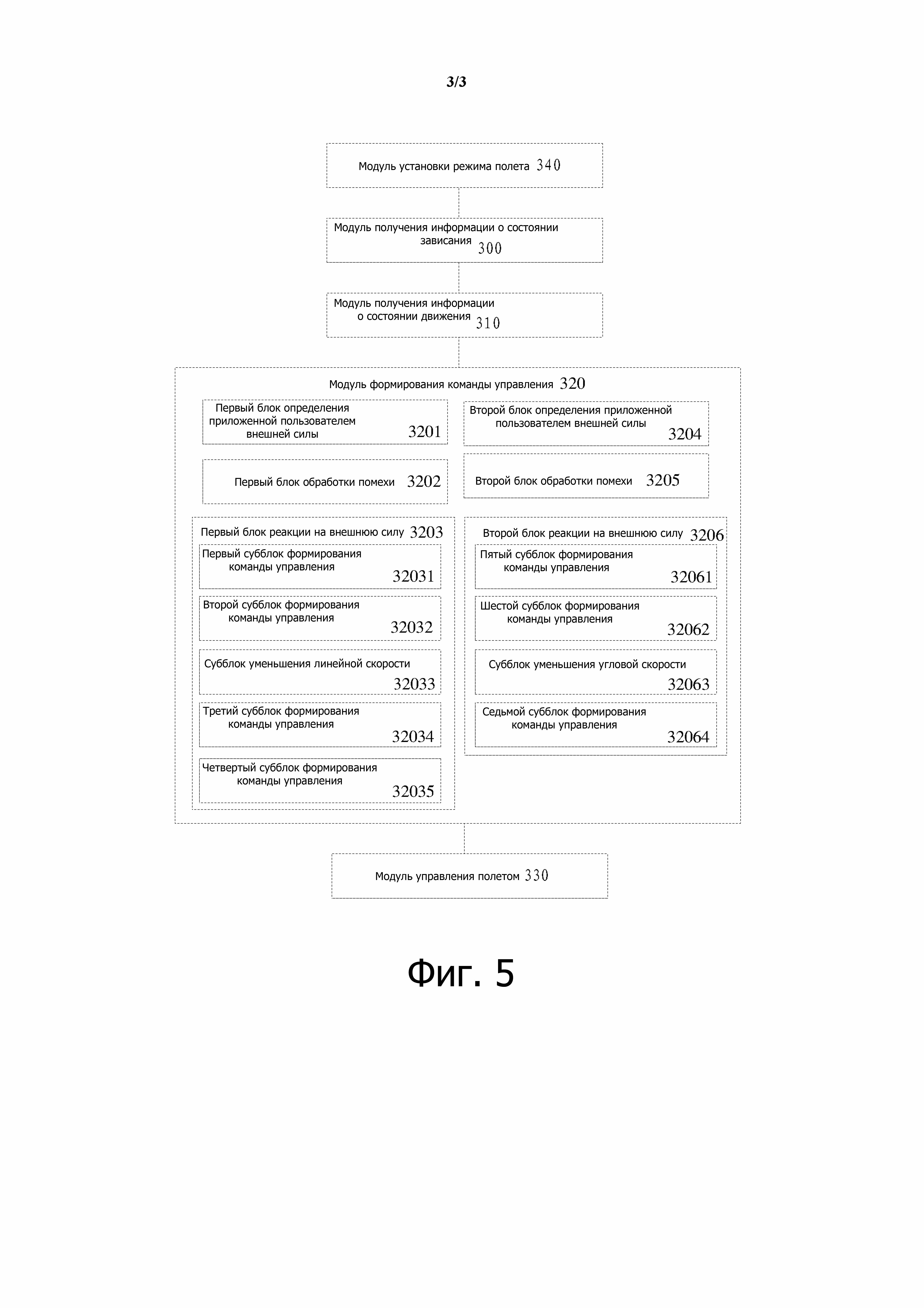
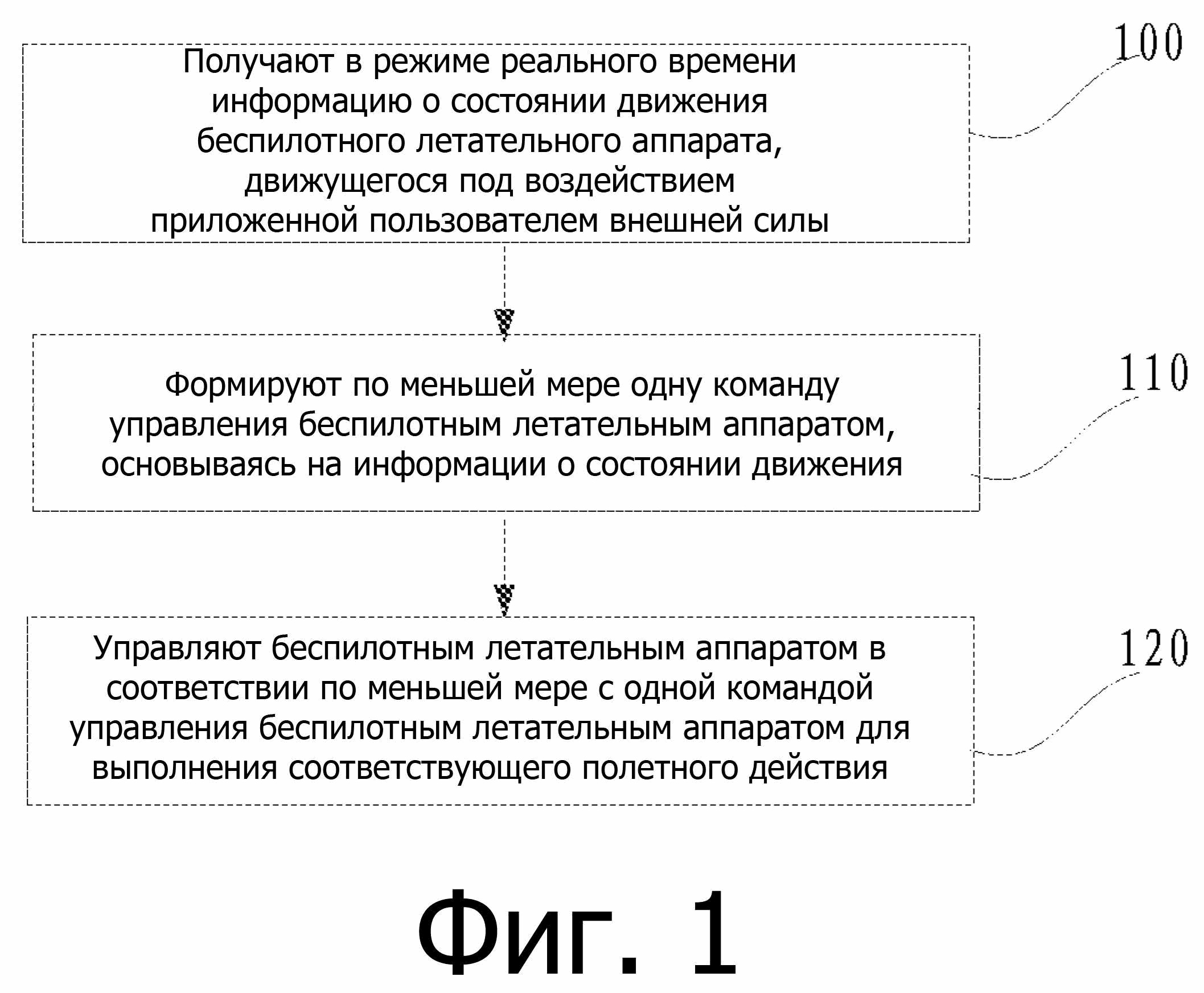
Способ и устройство управления полетом беспилотного летательного аппарата
Способ определения курса беспилотного летательного аппарата и беспилотный летательный аппарат
Беспилотный летательный аппарат
Способ и устройство управления беспилотным летательным аппаратом для защиты растений
Распыляющий диск, распыляющее устройство с распыляющим диском и беспилотный летательный аппарат
Способ и устройство для управления беспилотным летательным аппаратом
Корпусный узел насоса, насос, спринклерная система и беспилотный летательный аппарат
Способ и устройство управления полетом беспилотного летательного аппарата
Способ определения курса беспилотного летательного аппарата и беспилотный летательный аппарат
Способ и устройство для управления беспилотным летательным аппаратом

