Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОМЕХ, СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ, СПОСОБ ПОМОЩИ ПРИ ОТЪЕЗДЕ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОМЕХ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к способу определения помех, способу помощи при парковке, способу помощи при выезде и к устройству определения помех, которые определяют помехи для транспортного средства.
Предпосылки изобретения
[0002] Известно устройство удаленного управления транспортным средством, которое работает следующим образом. Когда транспортное средство управляют для перемещения из места парковки в целевую позицию, обнаруживают находящуюся на траектории транспортного средства помеху со ссылкой на изображение, заданное информацией изображений, выводимой из устройства формирования изображений, и транспортным средством управляют для совершения остановки при обнаружении такой помехи (например, см. патентный документ 1: JP2012-216079A).
Документы уровня техники
Патентные документы
[0003] Патентный документ 1: JP2012-216079A
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Водитель или пассажир удаленно управляемого транспортного средства может распознавать траекторию транспортного средства. В устройстве удаленного управления транспортным средством, описанном в патентном документе 1, к сожалению, человек, находящийся на траектории транспортного средства, обнаруживается как помеха независимо от того, является ли этот человек водителем или пассажиром транспортного средства или нет, и во время перемещения транспортного средства может выполняться замедление транспортного средства без необходимости в этом.
[0005] Решаемая настоящим изобретением проблема заключается в том, чтобы предоставлять способ определения помех и устройство определения помех, которые позволяют надлежащим образом осуществлять определение помехи для транспортного средства.
Средство решения проблем
[0006] Настоящее изобретение решает вышеуказанную проблему следующим образом. Когда обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, является водителем или пассажиром рассматриваемого транспортного средства, выполняют определение того, является ли или нет обнаруженный объект помехой для рассматриваемого транспортного средства, на основе второго критерия определения, при котором обнаруженный объект с меньшей вероятностью определяется в качестве помехи для рассматриваемого транспортного средства, чем при первом критерии определения, и который используется тогда, когда обнаруженный объект не является водителем или пассажиром рассматриваемого транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению определение помехи для транспортного средства может быть осуществлено надлежащим образом, и поэтому можно предотвращать ненужное выполнение замедления транспортного средства во время перемещения транспортного средства.
Краткое описание чертежей
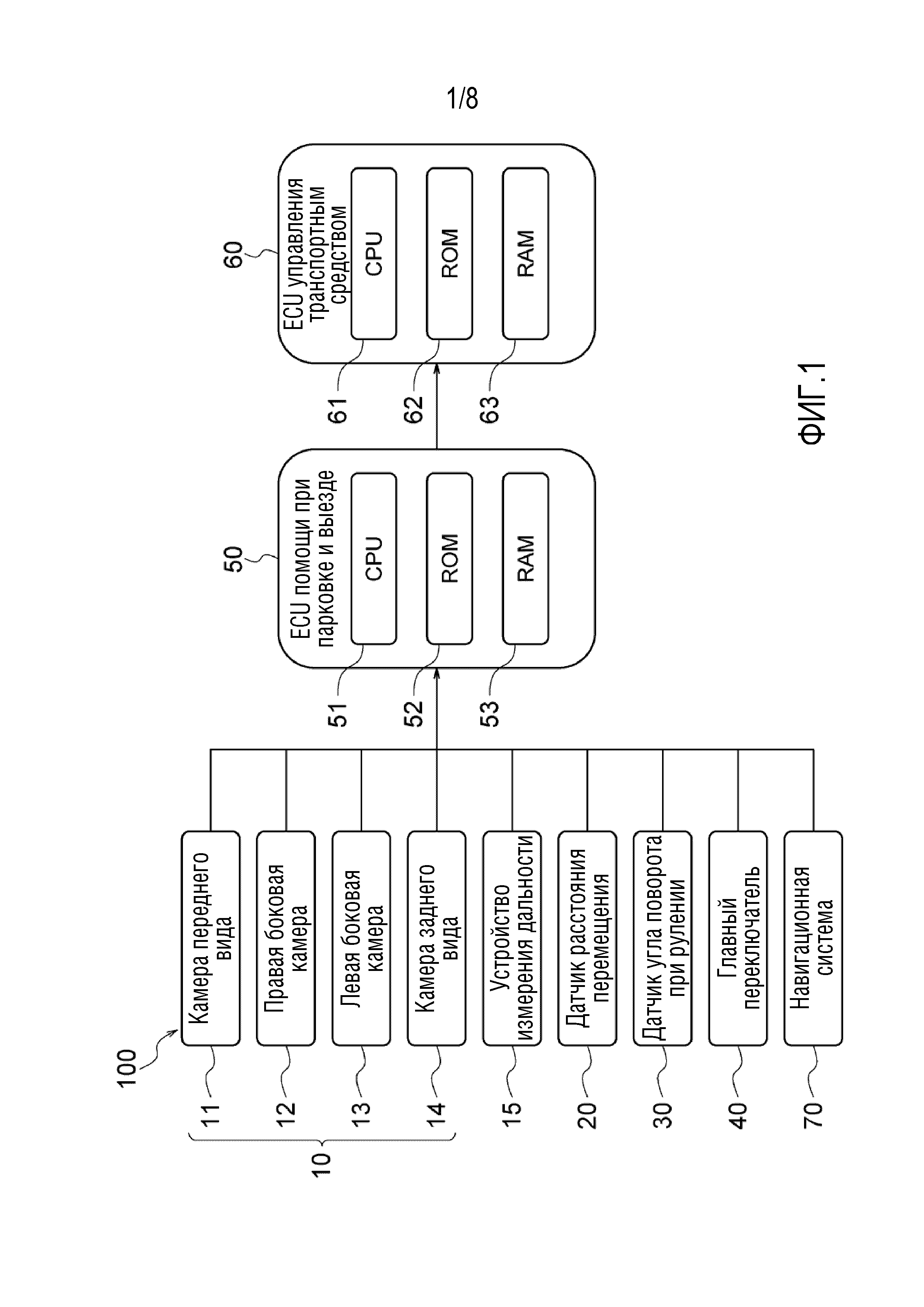
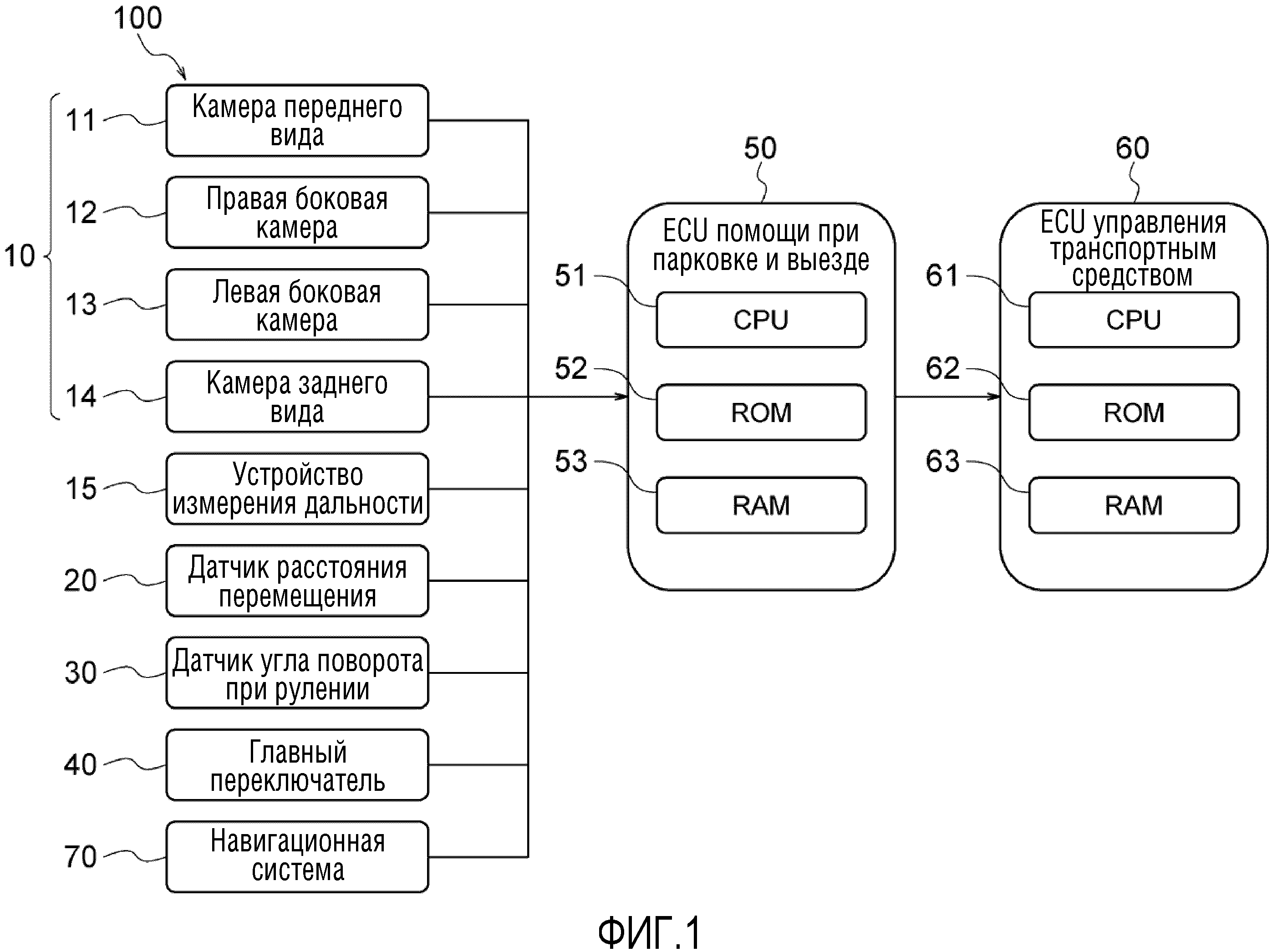
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения.
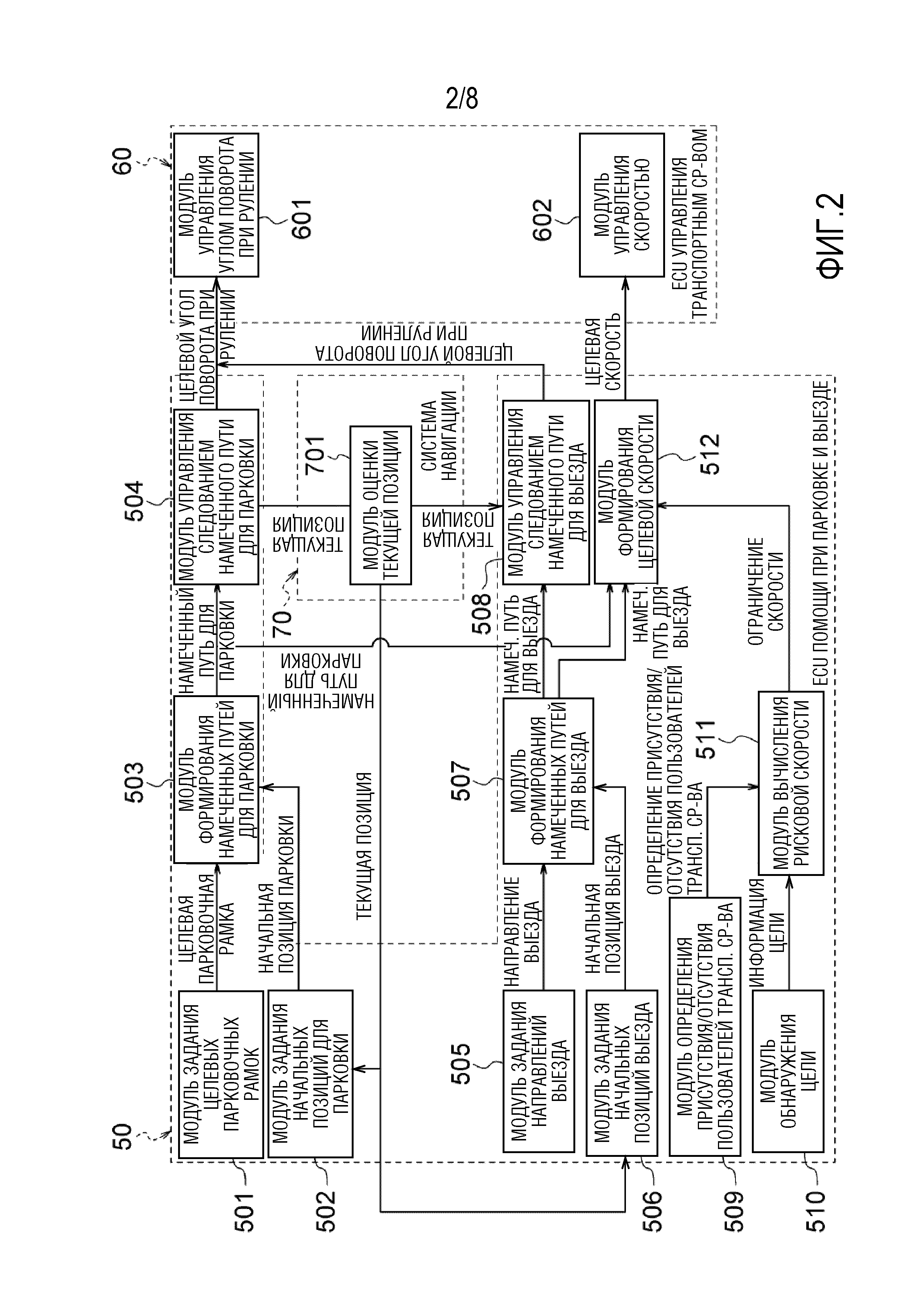
Фиг. 2 является блок-схемой для описания функций ЭБУ помощи при парковке и выезде по фиг. 1.
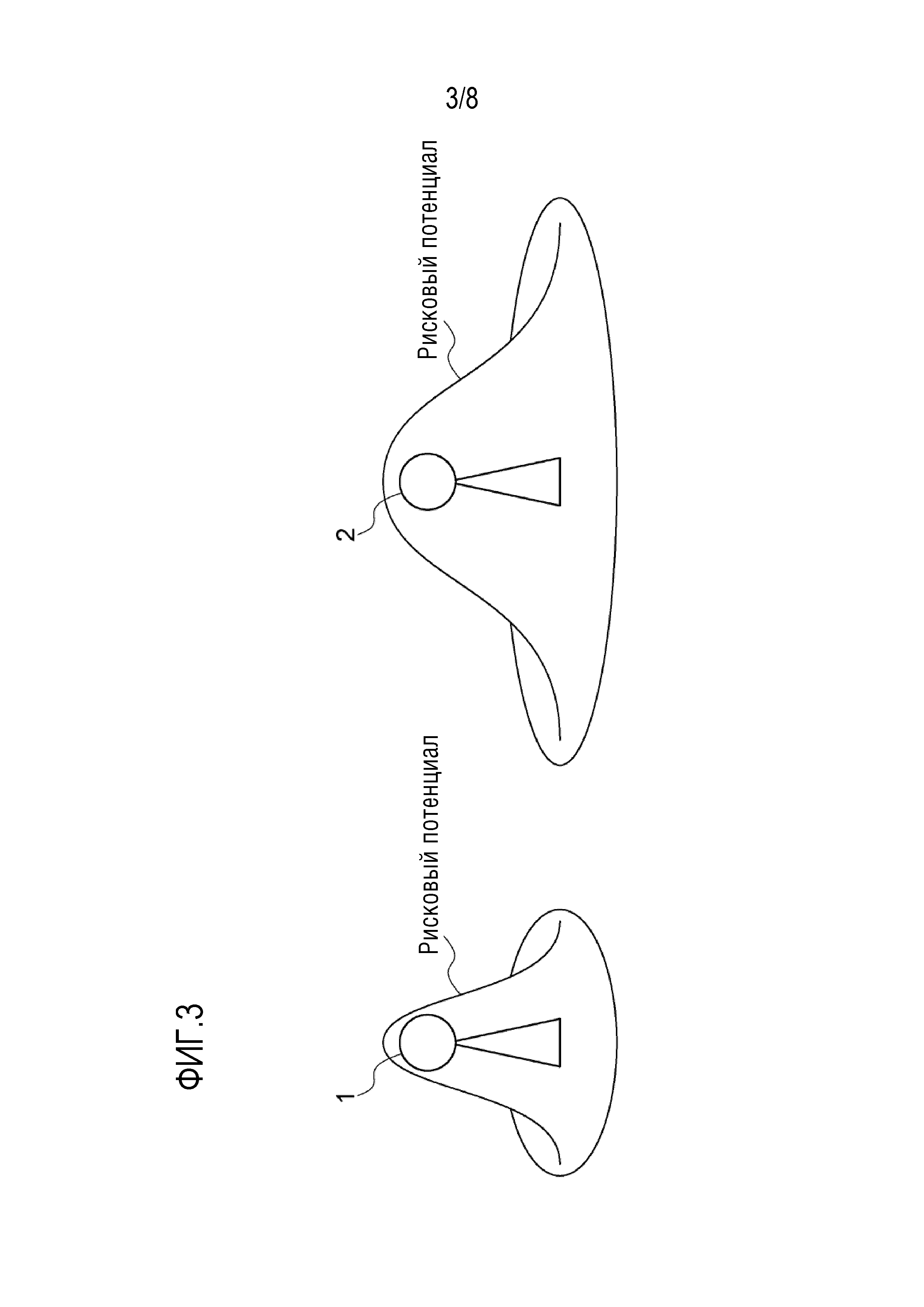
Фиг. 3 является набором схем для описания способа задания потенциального риска.
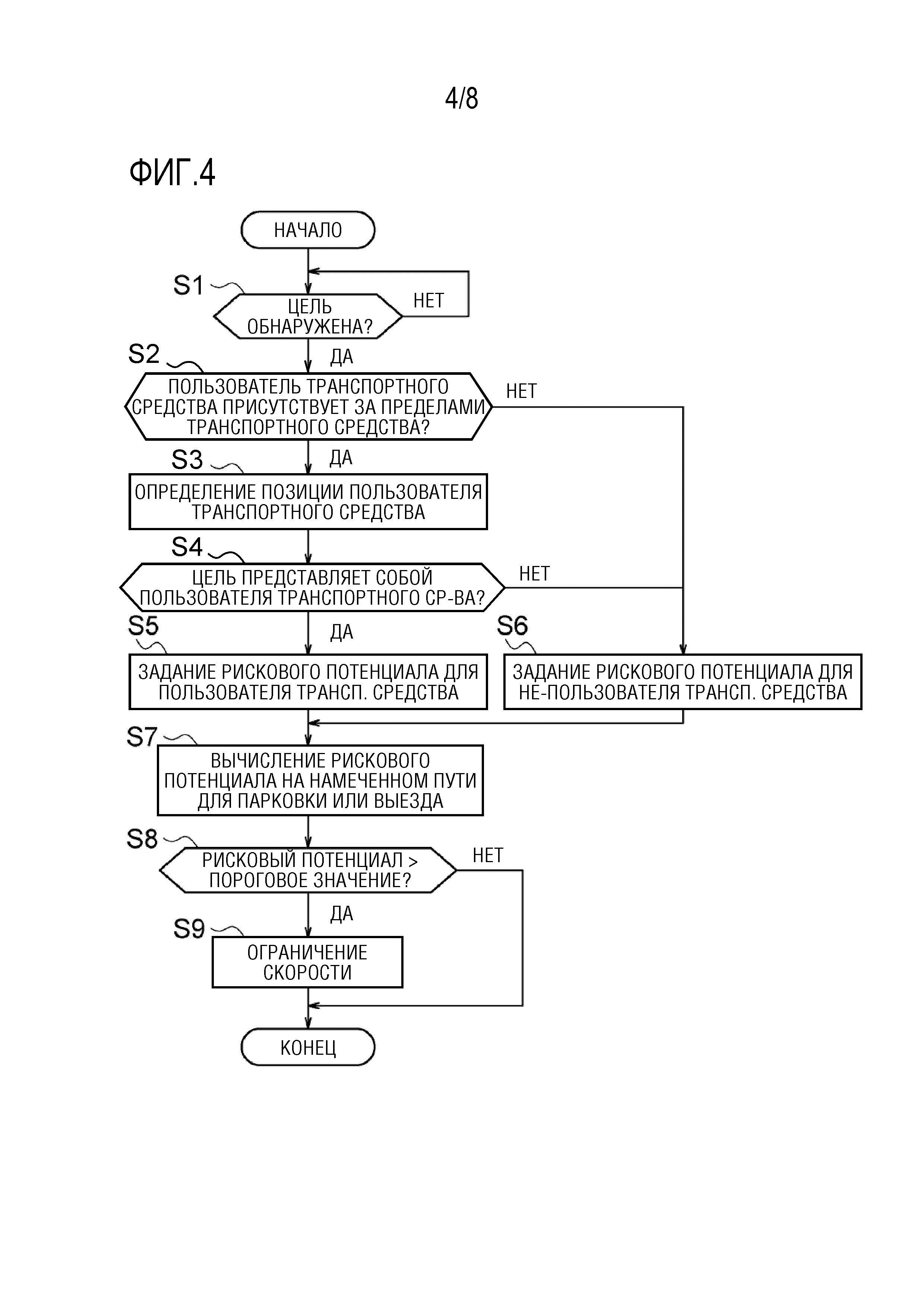
Фиг. 4 является блок-схемой, иллюстрирующей процедуру помощи при парковке или выезде для рассматриваемого транспортного средства, выполняемую устройством помощи при парковке и выезде.
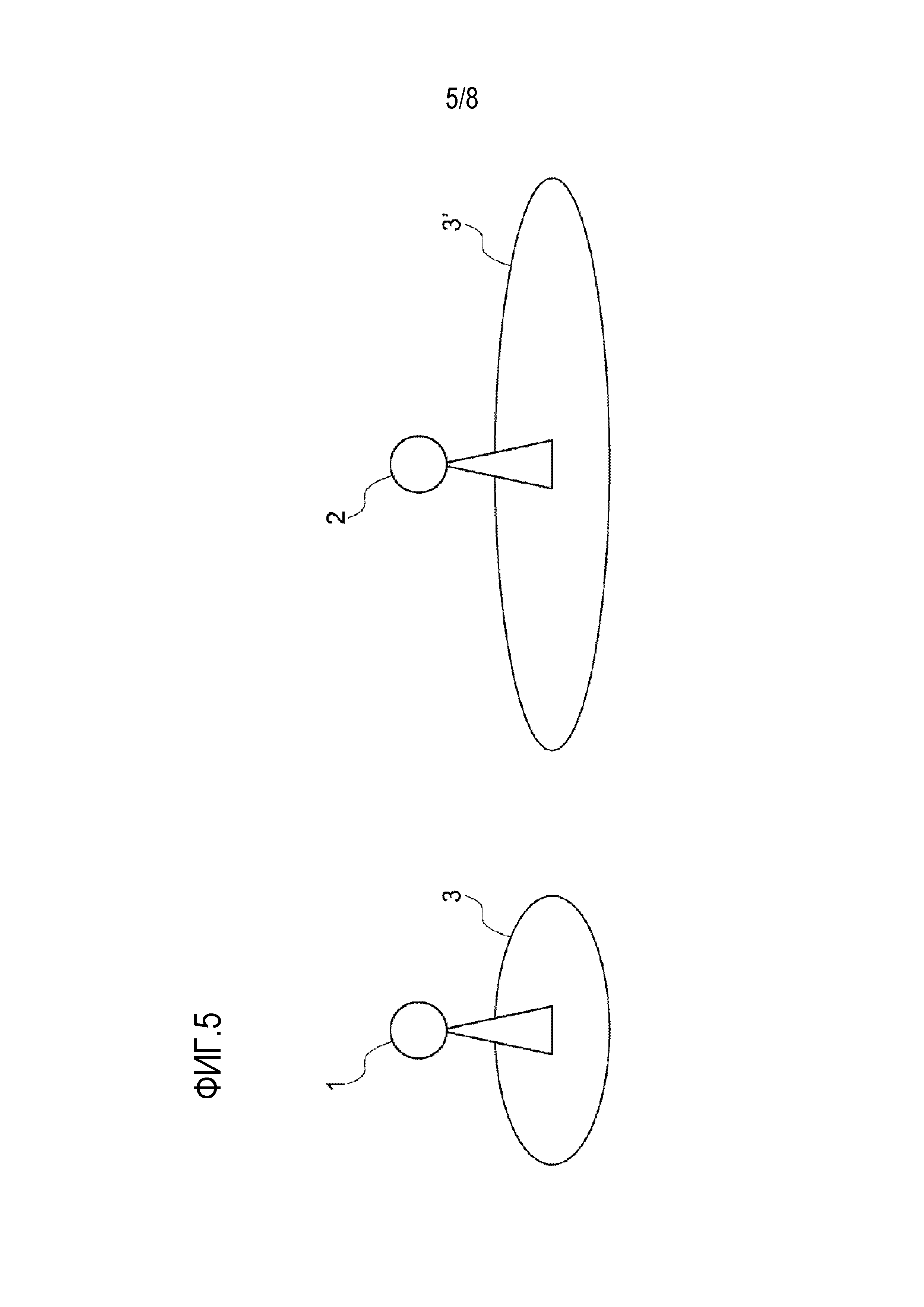
Фиг. 5 является набором схем для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления.
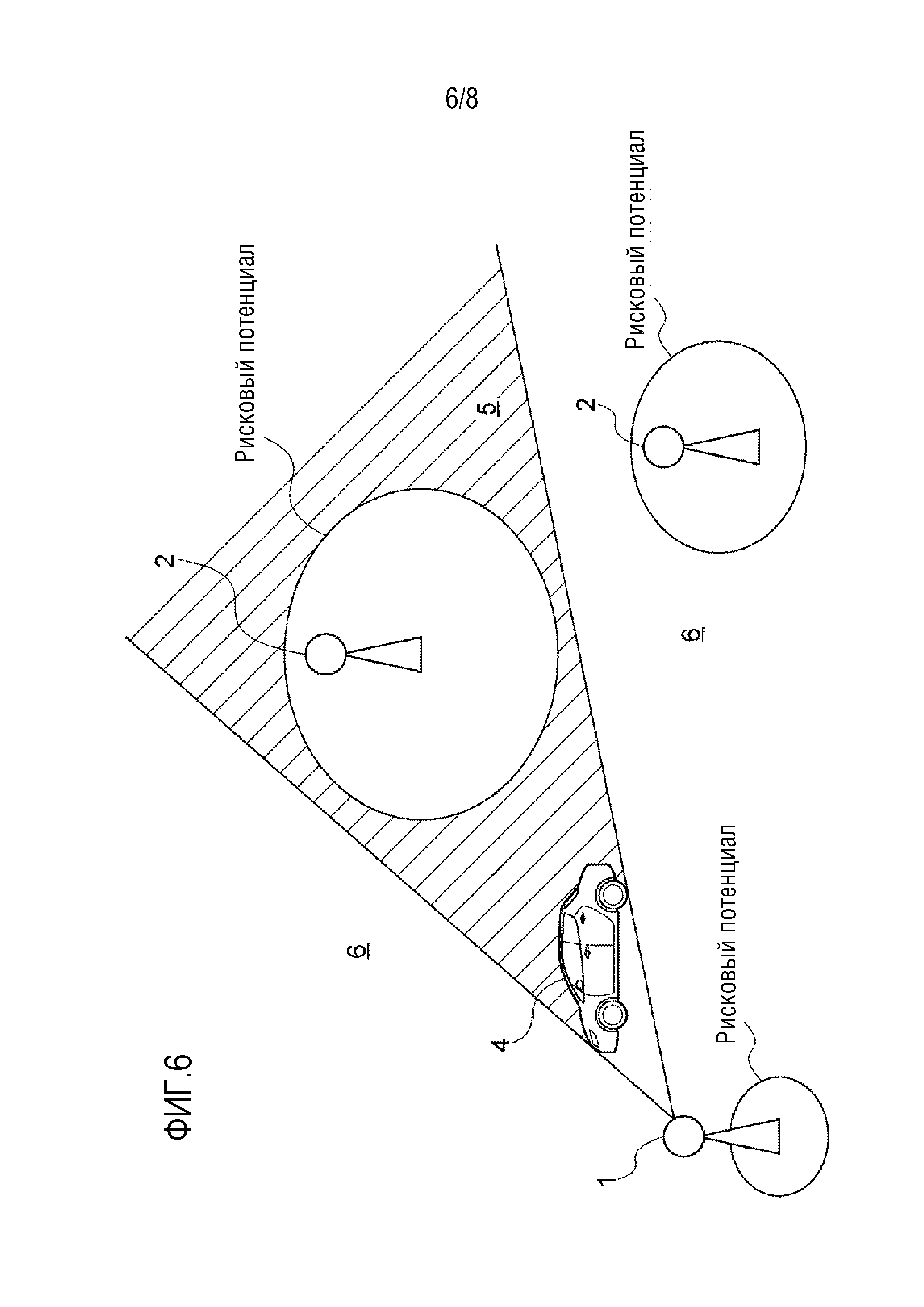
Фиг. 6 является схемой для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления.
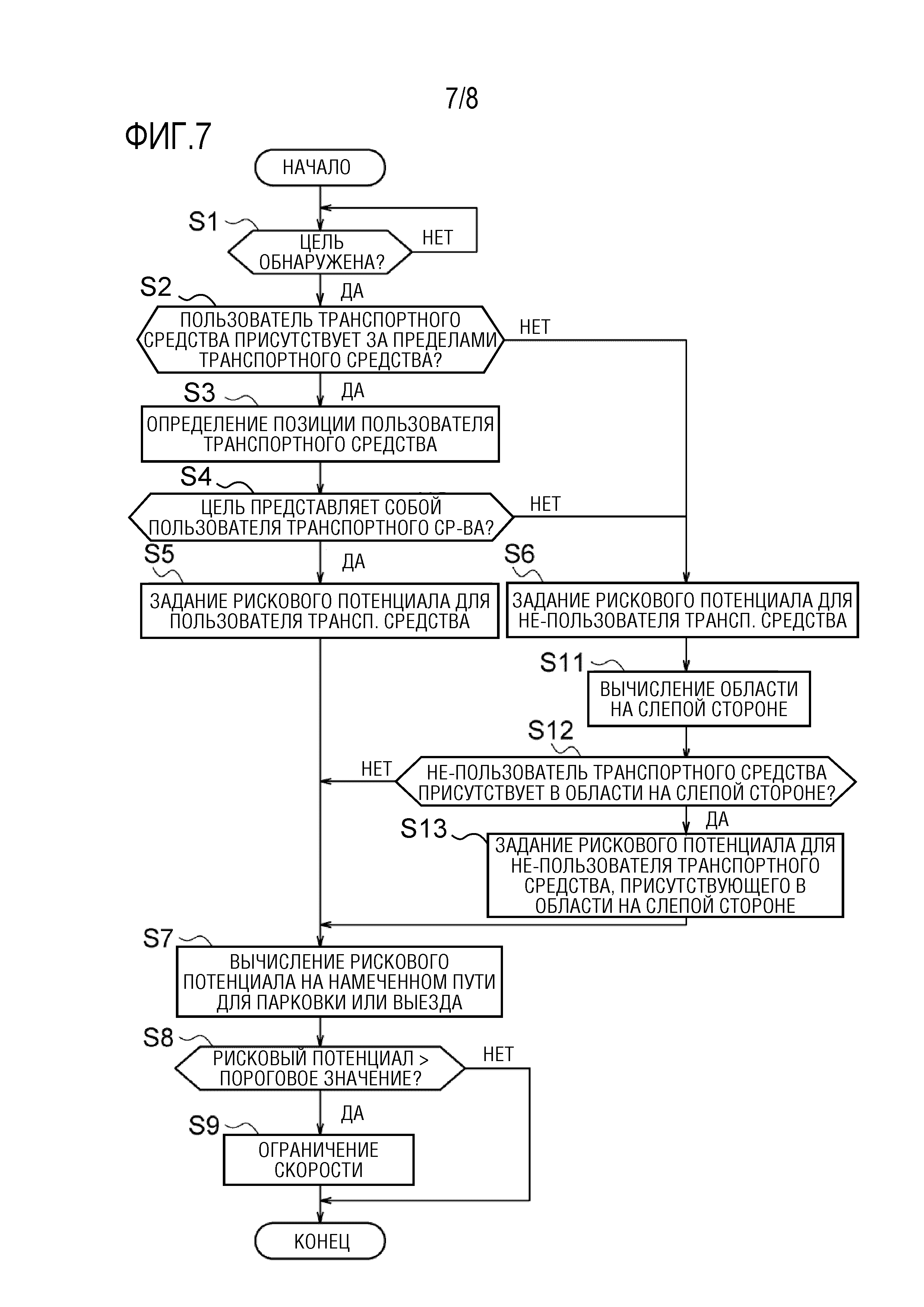
Фиг. 7 является блок-схемой, иллюстрирующей процедуру помощи при парковке или выезде, выполняемую устройством помощи при парковке и выезде согласно другому варианту осуществления.
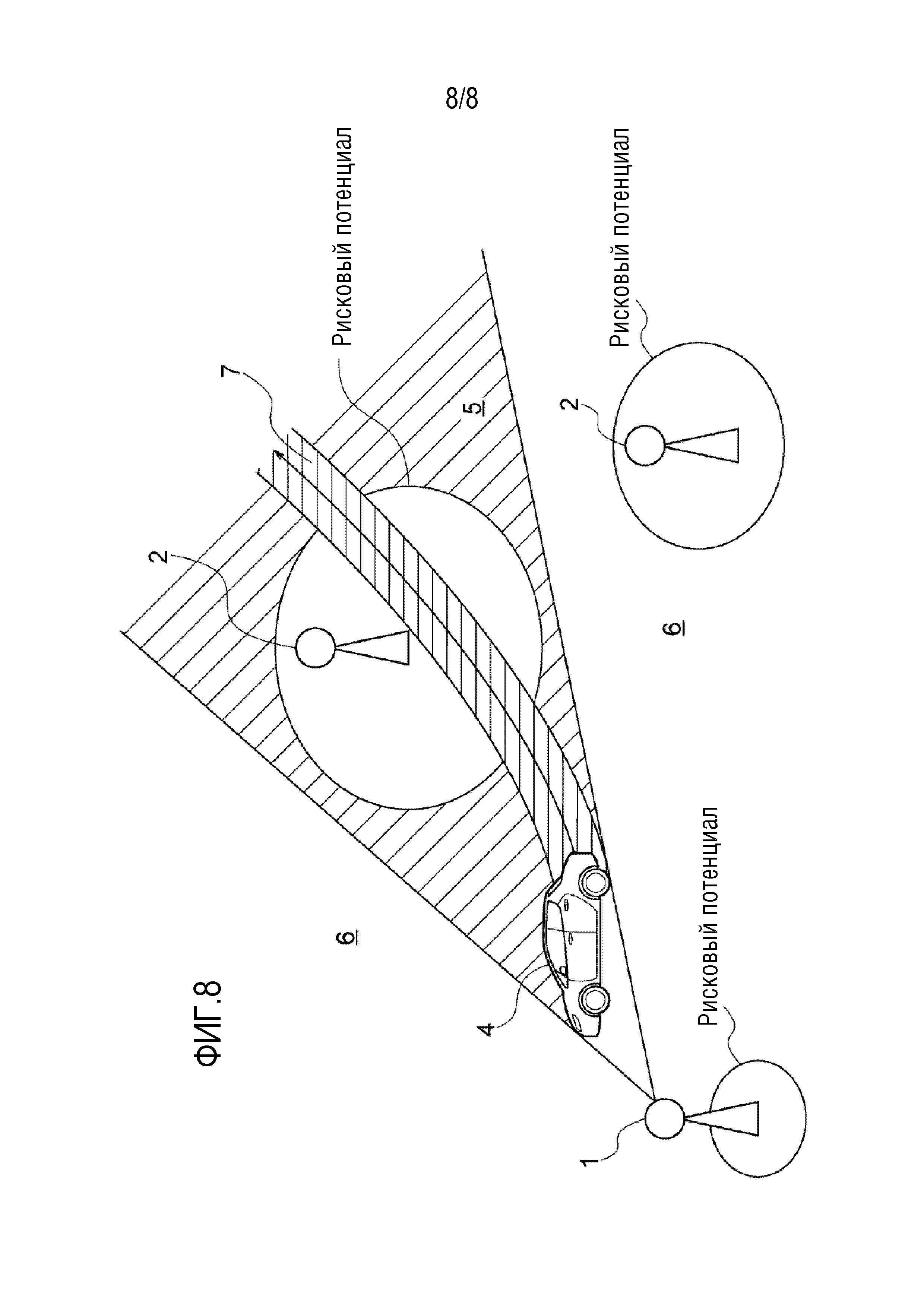
Фиг. 8 является схемой для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления.
Варианты осуществления изобретения
[0009] В дальнейшем будут описаны один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения. Устройство 100 помощи при парковке и выезде предусмотрено в качестве оборудования в транспортном средстве и помогает при операции парковки для перемещения (парковки) транспортного средства на парковочном месте и при операции выезда для перемещения транспортного средства из парковочного места.
[0010] При этом устройство 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения может реализовывать операцию парковки и операцию выезда транспортного средства под удаленным управлением. Например, водитель или пассажир транспортного средства вводит команду начать помощь при парковке или выезде в устройство удаленного управления, такое как удаленный контроллер или мобильный терминал, за пределами транспортного средства, чтобы тем самым добиться операции парковки и операции выезда транспортного средства.
[0011] Устройство 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения содержит набор 10 камер, дальномерное устройство 15, датчик 20 расстояния перемещения, датчик 30 угла поворота при рулении, главный переключатель 40, электронный блок управления (ЭБУ) 50 помощи при парковке и выезде, ЭБУ 60 управления транспортным средством и навигационную систему 70. Устройство 100 помощи при парковке и выезде дополнительно содержит аппаратные модули (не проиллюстрированы), такие как ЭБУ управления двигателем и ЭБУ управления усилителем руля, которыми обычно оснащаются транспортные средства. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую локальную сеть (LAN), чтобы обмениваться информацией друг с другом.
[0012] Набор 10 камер содержит камеру 11 переднего вида, правую боковую камеру 12, левую боковую камеру 13 и камеру 14 заднего вида, например, как проиллюстрировано на фигуре. Камера 11 переднего вида, которая устанавливается на переднем бампере транспортного средства либо в его окрестности, захватывает изображения впереди рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Правая боковая камера 12, которая устанавливается на правой стороне транспортного средства (например, в правосторонней части переда транспортного средства), захватывает изображения с правой стороны от рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Левая боковая камера 13, которая устанавливается на левой стороне транспортного средства (например, в левосторонней части переда транспортного средства), захватывает изображения с левой стороны от рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде. Камера 14 заднего вида, которая устанавливается на заднем бампере транспортного средства либо в его окрестности, захватывает изображения позади рассматриваемого транспортного средства и выводит информацию изображений в ЭБУ 50 помощи при парковке и выезде.
[0013] Дальномерное устройство 15 представляет собой радарный прибор или сонар, такой как радар миллиметрового диапазона, лазерный радар или ультразвуковой радар. Дальномерное устройство 15 устанавливается в том же положении, что и любая из камер 11-14, и обнаруживает присутствие или отсутствие объектов, таких как помехи (препятствия), пешеходы и другие транспортные средства около данного транспортного средства, позиции объектов и расстояния до объектов.
[0014] Датчик 20 расстояния перемещения вычисляет величину перемещения рассматриваемого транспортного средства и выводит ее в ЭБУ 50 помощи при парковке и выезде. Датчик 20 расстояния перемещения может быть выполнен, например, с использованием датчика скорости вращения или т.п., который определяет скорость вращения колеса рассматриваемого транспортного средства.
[0015] Датчик 30 угла поворота при рулении, который установлен в рулевой колонке, например, определяет угол поворота руля и выводит его в ЭБУ 50 помощи при парковке и выезде.
[0016] Главный переключатель 40 представляет собой переключатель, который задействуется пользователем, чтобы инструктировать начало помощи при парковке и помощи при выезде. Когда главный переключатель 40 не задействуется, он выводит сигнал «ВЫКЛ» в ЭБУ 50 помощи при парковке и выезде, а когда главный переключатель 40 задействован, он выводит сигнал «ВКЛ» в ЭБУ 50 помощи при парковке и выезде. Главный переключатель 40 устанавливается, например, в некоем местоположении на устройстве удаленного управления, таком как удаленный контроллер или мобильный терминал, который носится водителем или пассажиром, выполняющим удаленное управление за пределами транспортного средства, в некоем местоположении, в котором водитель может задействовать главный переключатель 40 в транспортном средстве, к примеру, в местоположении около приборной панели рассматриваемого транспортного средства или около руля либо в другом соответствующем местоположении. Главный переключатель 40 может представлять собой программный переключатель, предусмотренный на экране мобильного терминала, такого как смартфон, способный на обмен данными с рассматриваемым транспортным средством через сеть, программный переключатель, предусмотренный на экране навигационного устройства, либо другой соответствующий переключатель.
[0017] ЭБУ 50 помощи при парковке и выезде представляет собой контроллер, который всесторонне управляет устройством 100 помощи при парковке и выезде. ЭБУ 50 помощи при парковке и выезде содержит постоянное запоминающее устройство (ПЗУ) 52, которое хранит программу помощи при парковке и выезде, центральный процессор (ЦП) 51 в качестве операционной цепи, которая исполняет сохраненную в ПЗУ 52 программу, чтобы служить в качестве устройства 100 помощи при парковке и выезде согласно одному или более вариантам осуществления настоящего изобретения, и оперативное запоминающее устройство (ОЗУ) 53, которое служит в качестве доступного устройства хранения данных. ЭБУ 50 помощи при парковке и выезде, в который вводится информация об обнаружении или команды из набора 10 камер, дальномерного устройства 15, датчика 20 расстояния перемещения, датчика 30 угла поворота при рулении и главного переключателя 40, вычисляет целевой угол поворота при рулении и целевую скорость рассматриваемого транспортного средства и выводит их в ЭБУ 60 управления транспортным средством.
[0018] ЭБУ 60 управления транспортным средством представляет собой контроллер, который выполняет управление движением транспортного средства. ЭБУ 60 управления транспортным средством содержит ПЗУ 62, которое хранит программу управления движением транспортного средства, ЦП 61 в качестве операционной цепи, которая исполняет сохраненную в ПЗУ 62 программу, чтобы служить в качестве устройства управления транспортным средством, и ОЗУ 63, которое служит в качестве доступного устройства хранения данных. ЭБУ 60 управления транспортным средством, в который вводятся целевой угол поворота при рулении и целевая скорость рассматриваемого транспортного средства из ЭБУ 50 помощи при парковке и выезде, выполняет управление движением рассматриваемого транспортного средства во взаимодействии с другими ЭБУ, такими как ЭБУ управления двигателем и ЭБУ управления усилителем руля.
[0019] Фиг. 2 является блок-схемой для описания функций ЭБУ 50 помощи при парковке и выезде. Как проиллюстрировано на этой фигуре, ЭБУ 50 помощи при парковке и выезде содержит модуль 501 задания целевых парковочных рамок, модуль 502 задания начальных позиций парковки, модуль 503 формирования путей парковки, модуль 504 управления следованием по пути парковки, модуль 505 задания направлений выезда, модуль 506 задания начальных позиций выезда, модуль 507 формирования путей выезда, модуль 508 управления следованием по пути выезда, модуль 509 определения присутствия/отсутствия пользователей транспортного средства (термин "пользователь транспортного средства" при использовании в данном документе означает водителя или пассажира рассматриваемого транспортного средства), модуль 510 обнаружения цели, модуль 511 вычисления рисковой скорости и модуль 512 формирования целевой скорости. ЭБУ 60 управления транспортным средством включает в себя модуль 601 управления углом поворота при рулении и модуль 602 управления скоростью. Навигационная система 70 включает в себя модуль 701 оценки текущей позиции. Модуль 701 оценки текущей позиции оценивает текущую позицию рассматриваемого транспортного средства и выводит результат оценки в модуль 502 задания начальных позиций парковки, модуль 504 управления следованием по пути парковки, модуль 506 задания начальных позиций выезда и модуль 508 управления следованием по пути выезда. Примеры процесса оценки текущей позиции включают в себя процесс измерения текущей позиции рассматриваемого транспортного средства с использованием глобальной системы позиционирования (GPS), процесс получения текущей позиции по связи между транспортным средством и дорожной инфраструктурой и процесс вычисления текущей позиции на основе величины руления при рулении и рабочей величины нажатия педали акселератора.
[0020] Модуль 501 задания целевых парковочных рамок задает парковочную рамку, в которую рассматриваемое транспортное средство паркуется посредством автоматизированного вождения (эта парковочная рамка в дальнейшем называется "целевой парковочной рамкой"). Модуль 501 задания целевых парковочных рамок сначала обнаруживает парковочные рамки, существующие на автомобильной парковке, из изображений, захваченных камерами 11-14, и затем выбирает места, в которых возможна парковка (такие места в дальнейшем называются "доступными парковочными местами") из числа обнаруженных парковочных рамок.
[0021] В процессе обнаружения парковочных рамок, во-первых, формируют изображение вида сверху из изображений, захваченных камерами 11-14, и из этого изображения вида сверху обнаруживают возможные кандидаты на линии рамок, которые могут составлять парковочные рамки. Затем выполняют определение того, удовлетворяют ли или нет обнаруженные возможные кандидаты на линии рамок условиям определения, относящимся к расстояниям от других линий рамок, относительным углам по отношению к другим линиям рамок и длинам, и места, заданные возможными кандидатами на линии рамок, удовлетворяющими условиям определения, регистрируют в качестве парковочных рамок. Непринципиально формировать изображение вида сверху из изображений, захваченных камерами 11-14, и обнаруживать парковочные рамки из изображения вида сверху. Например, информация о парковочных рамках может быть получена по связи с окружающей транспортное средство средой, к примеру, так называемой связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами.
[0022] В процессе обнаружения доступных парковочных мест выполняют определение того, присутствуют ли или нет помехи, такие как припаркованные транспортные средства, в обнаруженных парковочных рамках или на путях при парковке в парковочных рамках, на основе информации о дальности (информации о точках отражения) из дальномерного устройства 15, и регистрируют парковочные рамки без помех в качестве доступных парковочных мест. Непринципиально обнаруживать доступные парковочные места на основе информации о дальности из дальномерного устройства 15, и доступные парковочные места также могут обнаруживаться из изображений, захваченных камерами 11-14, или камерой, установленной на автомобильной парковке. В дополнение или альтернативно, информация о доступных парковочных местах может быть получена из центра управления автомобильной парковки.
[0023] Модуль 501 задания целевых парковочных рамок затем обнаруживает одно или более парковочных мест, рекомендуемых для водителя или пассажира рассматриваемого транспортного средства (такие парковочные места в дальнейшем называются "рекомендованными парковочными местами"), из числа доступных парковочных мест и представляет рекомендованные парковочные места водителю или пассажиру рассматриваемого транспортного средства. Примеры процесса обнаружения рекомендованных парковочных мест включают в себя процесс обнаружения доступных парковочных мест с кратчайшим требуемым временем при парковке на этих доступных парковочных местах в качестве рекомендованных парковочных мест и процесс обнаружения доступных парковочных мест, ближайших к точке взгляда водителя рассматриваемого транспортного средства, в качестве рекомендованных парковочных мест. В процессе представления рекомендованных парковочных мест дисплеем управляют на отображение изображения вида сверху множества парковочных рамок, включающих рекомендованные парковочные места.
[0024] Модуль 501 задания целевых парковочных рамок затем принимает указание целевой парковочной рамки, выполненное водителем или пассажиром рассматриваемого транспортного средства, и выводит указанную целевую парковочную рамку в модуль 503 формирования путей парковки. В примерном способе указание целевой парковочной рамки может выполняться таким образом, что водитель или пассажир касается рекомендованного парковочного места, отображаемого на дисплее с сенсорной панелью, либо водитель или пассажир использует функциональную клавишу для того, чтобы перемещать отображаемый на дисплее курсор в рекомендованное парковочное место, отображаемое на дисплее, и задействует кнопку определения.
[0025] Модуль 502 задания начальных позиций парковки выводит позицию, в которой начинается процесс помощи при парковке (эта позиция в дальнейшем называется "начальной позицией парковки") в модуль 503 формирования путей парковки. Например, когда включен главный переключатель 40, модуль 502 задания начальных позиций парковки получает текущую позицию рассматриваемого транспортного средства в этот момент из модуля 701 оценки текущей позиции и задает полученную текущую позицию в качестве начальной позиции парковки.
[0026] Модуль 503 формирования путей парковки формирует путь из начальной позиции парковки, заданной модулем 502 задания начальных позиций парковки, в целевую парковочную рамку, заданную модулем 501 задания целевых парковочных рамок (этот путь в дальнейшем называется "путем парковки"), и выводит сформированный путь парковки в модуль 504 управления следованием по пути парковки и модуль 512 формирования целевой скорости. В процессе формирования пути парковки, например, вычисляют путь по кривой от начальной позиции парковки до позиции поворота (позиции, в которой выполняется поворот для парковки) и путь по кривой от позиции поворота до целевой парковочной рамки. Непринципиально вычислять путь парковки, и путь парковки, определенный для каждой парковочной рамки, может быть предварительно сохранен в запоминающем устройстве (ПЗУ) и считан из запоминающего устройства. В дополнение или альтернативно, информация о предварительно определенном пути парковки может быть получена по связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами.
[0027] Модуль 504 управления следованием по пути парковки проводит перекрестную проверку текущей позиции рассматриваемого транспортного средства, выводимой из модуля 701 оценки текущей позиции, с путем парковки, выводимым из модуля 503 формирования путей парковки, и обнаруживает отклонения (отклонение угла рыскания и боковое отклонение) позиции движения рассматриваемого транспортного средства с привязкой к пути парковки. Модуль 504 управления следованием по пути парковки вычисляет целевой угол поворота при рулении таким образом, что обнаруженные отклонения уменьшаются, либо становятся соответствующими пороговыми значениями или меньше их, и выводит вычисленный целевой угол поворота при рулении в модуль 601 управления углом поворота при рулении. Модуль 601 управления рулением управляет углом поворота при рулении рассматриваемого транспортного средства таким образом, чтобы добиться целевого угла поворота при рулении, выводимого из модуля 504 управления следованием по пути парковки.
[0028] Модуль 512 формирования целевой скорости вычисляет целевую скорость в соответствии с путем парковки, выводимым из модуля 503 формирования путей парковки, и выводит вычисленную целевую скорость в модуль 602 управления скоростью. Целевая скорость представляет собой, например, такую скорость, что выполняется ускорение или замедление в соответствии с кривизной пути парковки. Модуль 512 формирования целевой скорости также вычисляет целевую скорость в соответствии с путем выезда, выводимым из модуля 507 формирования путей выезда, который будет описан ниже, и выводит вычисленную целевую скорость в модуль 602 управления скоростью. При этом, когда выводится предел скорости из модуля 511 вычисления рисковой скорости, который будет описан ниже, модуль 512 формирования целевой скорости вычисляет целевую скорость, которая не выше предела скорости. Модуль 602 управления скоростью управляет скоростью рассматриваемого транспортного средства таким образом, чтобы добиться целевой скорости, выводимой из модуля 512 формирования целевой скорости.
[0029] Модуль 505 задания направлений выезда задает направление выезда из парковочной рамки, в которой паркуется рассматриваемое транспортное средство, и выводит направление выезда в модуль 507 формирования путей выезда. Например, модуль 505 задания направлений выезда принимает указание направления выезда, выполненное водителем или пассажиром рассматриваемого транспортного средства, и задает это принятое направление в качестве направления выезда или предварительно сохраняет определенное для каждой парковочной рамки направление выезда в запоминающем устройстве (ПЗУ) и считывает это направление выезда из запоминающего устройства, или же получает предварительно определенное направление выезда по связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами.
[0030] Модуль 507 формирования путей выезда формирует путь из позиции парковки рассматриваемого транспортного средства в направлении выезда, заданном модулем 505 задания направлений выезда (этот путь в дальнейшем называется "путем выезда"), и выводит сформированный путь выезда в модуль 508 управления следованием по пути выезда и модуль 512 формирования целевой скорости. В процессе формирования пути выезда, когда необходим поворот для выезда, например, вычисляют путь по кривой от позиции парковки до позиции поворота (позиции, в которой выполняется поворот для выезда) и путь по кривой от позиции поворота до целевой линии выезда. Непринципиально вычислять путь выезда, и определенный для каждой парковочной рамки путь выезда может быть предварительно сохранен в запоминающем устройстве (ПЗУ) и считан из запоминающего устройства. В дополнение или альтернативно, предварительно определенный путь выезда может быть получен по связи между транспортным средством и дорожной инфраструктурой или связи между транспортными средствами.
[0031] Модуль 508 управления следованием по пути выезда проводит перекрестную проверку текущей позиции рассматриваемого транспортного средства, выводимой из модуля 701 оценки текущей позиции, с путем выезда, выводимым из модуля 507 формирования путей выезда, и обнаруживает отклонения (отклонение угла рыскания и боковое отклонение) позиции движения рассматриваемого транспортного средства с привязкой к пути выезда. Модуль 508 управления следованием по пути выезда вычисляет целевой угол поворота при рулении таким образом, что обнаруженные отклонения уменьшаются, либо становятся соответствующими пороговыми значениями или меньше их, и выводит вычисленный целевой угол поворота при рулении в модуль 601 управления углом поворота при рулении. Модуль 601 управления рулением управляет углом поворота при рулении рассматриваемого транспортного средства таким образом, чтобы добиться целевого угла поворота при рулении, выводимого из модуля 508 управления следованием по пути выезда.
[0032] Модуль 509 определения присутствия/отсутствия пользователей транспортного средства определяет, присутствует ли или нет водитель или пассажир транспортного средства за пределами транспортного средства, а также позицию водителя или пассажира транспортного средства, присутствующего за пределами транспортного средства, и выводит результаты определения в модуль 511 вычисления рисковой скорости. Модуль 509 определения присутствия/отсутствия пользователей транспортного средства обнаруживает позицию устройства удаленного управления, такого как удаленный контроллер или мобильный терминал, для удаленного управления операцией парковки и операцией выезда, например, посредством системы обнаружения позиции с использованием известной схемы радиосвязи, такой как схема на основе разности времен поступления радиоволн или схема на основе интенсивности приема радиоволн, и определяет, находится ли обнаруженная позиция устройства удаленного управления внутри или снаружи транспортного средства и где расположена обнаруженная позиция устройства удаленного управления за пределами транспортного средства.
[0033] Модуль 510 обнаружения цели обнаруживает цель, существующую за пределами транспортного средства, на основе сигнала измерения дальности, выводимого из дальномерного устройства 15, и выводит информацию об обнаружении, включающую в себя позицию цели, в модуль 511 вычисления рисковой скорости. В процессе обнаружения цели цель распознают на основе облаков позиционной информации о точках отражения (в дальнейшем называемых "облаками точек"), которые вводятся в виде облаков полярных координат из дальномерного устройства 15. В этом процессе обнаружения цели облака точек, вводимые из дальномерного устройства 15, сначала подвергаются преобразованию координат из полярных координат в координаты XYZ для интегрирования, а затем выполняется кластеризация для того, чтобы извлечь набор близких друг к другу облаков. В дополнение или альтернативно, обнаружение цели может выполняться посредством проведения анализа информации изображений, выводимой из камер 11-14. Затем цель обнаруживается из облаков точек.
[0034] Модуль 511 вычисления рисковой скорости задает потенциальный риск, который указывает на уровень риска того, что рассматриваемое транспортное средство приближается вплотную или сталкивается с помехой для рассматриваемого транспортного средства, присутствующей за пределами рассматриваемого транспортного средства. Когда потенциальный риск на пути движения рассматриваемого транспортного средства превышает пороговое значение, модуль 511 вычисления рисковой скорости вычисляет предел скорости и выводит его в модуль 512 формирования целевой скорости. В ответ на информацию об обнаружении цели, выводимую из модуля 510 обнаружения цели, модуль 511 вычисления рисковой скорости задает потенциальный риск на основе результата определения, выводимого из модуля 509 определения присутствия/отсутствия пользователей транспортного средства. Заданный потенциальный риск затем сравнивается с предварительно установленным значением, которое предварительно задано, и выполняется определение того, превышает ли потенциальный риск пороговое значение или не выше порогового значения.
[0035] Фиг. 3 является набором схем для описания способа задания потенциального риска. Левая схема этой фигуры иллюстрирует распределение потенциального риска, когда цель, обнаруженная модулем 510 обнаружения цели, является пользователем 1 (т.е. водителем или пассажиром) рассматриваемого транспортного средства, тогда как правая схема этой фигуры иллюстрирует распределение потенциального риска, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой человека, который не является ни водителем, ни пассажиром рассматриваемого транспортного средства (этот человек в дальнейшем называется "непользователем 2").
[0036] Как проиллюстрировано на фиг. 3, потенциальный риск, когда цель, обнаруженная модулем 510 обнаружения цели, является пользователем 1 рассматриваемого транспортного средства (этот потенциальный риск в дальнейшем называется "вторым потенциальным риском"), имеет распределение с меньшей дисперсией, чем у потенциального риска, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2 (этот потенциальный риск в дальнейшем называется "первым потенциальным риском"). Таким образом, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства, модуль 511 вычисления рисковой скорости задает критерий определения (второй критерий определения), при котором цель с меньшей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства, чем при критерии определения (первом критерии определения), когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2. Таким образом, используются критерии определения, при которых потенциальный риск с меньшей дисперсией определяется с меньшей вероятностью, но настоящее изобретение не ограничено этим, и уровень риска может задаваться более низким.
[0037] Фиг. 4 является блок-схемой, иллюстрирующей процедуру помощи при парковке или выезде, выполняемую устройством 100 помощи при парковке и выезде. Управление, представленное этой блок-схемой, начинается, когда включен главный переключатель 40 и дана команда на начало помощи при парковке или выезде, и процедура переходит к этапу S1.
[0038] На этапе S1 модуль 510 обнаружения цели определяет, обнаружена ли или нет цель за пределами транспортного средства. При положительном определении на этом этапе далее выполняется этап S2, на котором модуль 509 определения присутствия/отсутствия пользователей транспортного средства определяет, присутствует ли или нет пользователь 1 рассматриваемого транспортного средства за пределами транспортного средства. При положительном определении на этапе S2 далее выполняется этап S3, тогда как при отрицательном определении далее выполняется этап S6. На этапе S3 модуль 509 определения присутствия/отсутствия пользователей транспортного средства определяет позицию пользователя 1, присутствующего за пределами транспортного средства.
[0039] Затем, на этапе S4, модуль 511 вычисления рисковой скорости проводит перекрестную проверку позиции цели, обнаруженной модулем 510 обнаружения цели, с позицией пользователя рассматриваемого транспортного средства, определенного модулем 509 определения присутствия/отсутствия пользователей транспортного средства, и определяет, является ли или нет цель, обнаруженная модулем 510 обнаружения цели, пользователем рассматриваемого транспортного средства. При положительном определении на этом этапе далее выполняется этап S5, тогда как при отрицательном определении далее выполняется этап S6.
[0040] На этапе S5 модуль 511 вычисления рисковой скорости задает второй потенциальный риск, который представляет собой потенциальный риск, когда цель, обнаруженная модулем 510 обнаружения цели, является пользователем 1. С другой стороны, на этапе S6 модуль 511 вычисления рисковой скорости задает первый потенциальный риск, который представляет собой потенциальный риск, когда цель, обнаруженная модулем 510 обнаружения цели, является непользователем 2.
[0041] После этапов S5 и S6 выполняется этап S7, на котором модуль 511 вычисления рисковой скорости вычисляет потенциальный риск на пути парковки или выезда рассматриваемого транспортного средства. Затем, на этапе S8, модуль 511 вычисления рисковой скорости определяет, превышает ли или нет потенциальный риск на пути парковки или выезда рассматриваемого транспортного средства пороговое значение. При положительном определении далее выполняется этап S9, тогда как отрицательное определение завершает процесс.
[0042] На этапе S9 модуль 511 вычисления рисковой скорости вычисляет предел скорости и выводит его в модуль 512 формирования целевой скорости, который формирует целевую скорость, которая не выше предела скорости, и выводит целевую скорость в модуль 602 управления скоростью. Модуль 602 управления скоростью управляет скоростью рассматриваемого транспортного средства так, чтобы добиться целевой скорости, сформированной модулем формирования целевой скорости 512. При этом, когда предел скорости, вычисленный модулем 511 вычисления рисковой скорости, ниже целевой скорости до того, как потенциальный риск на пути парковки или выезда рассматриваемого транспортного средства превышает пороговое значение, модуль 602 управления скоростью управляет рассматриваемым транспортным средством так, что оно замедляется.
[0043] Как описано выше, в способе определения помех для рассматриваемого транспортного средства согласно одному или более вариантам осуществления настоящего изобретения, ЭБУ 50 помощи при парковке и выезде используется для того, чтобы определять, является ли или нет обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, помехой для рассматриваемого транспортного средства, на основе первого и второго потенциальных рисков. При этом первым потенциальным риском называется критерий определения, который задается, когда обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, представляет собой непользователя 2 рассматриваемого транспортного средства, тогда как вторым потенциальным риском называется критерий определения, который задается, когда обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, представляет собой пользователя 1 рассматриваемого транспортного средства. При последнем критерии определения (втором потенциальном риске) обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, с меньшей вероятностью определяется в качестве помехи для рассматриваемого транспортного средства, чем при первом критерии определения (первом потенциальном риске). Это позволяет снизить вероятность того, что пользователь 1 рассматриваемого транспортного средства, который распознает траекторию парковки или выезда рассматриваемого транспортного средства, определяется как помеха для рассматриваемого транспортного средства, тем самым предотвращая ненужное выполнение управления рассматриваемым транспортным средством, чтобы объехать помеху для рассматриваемого транспортного средства. В частности, можно предотвратить ненужное выполнение замедления или остановки транспортного средства во время перемещения транспортного средства.
[0044] Фиг. 5 является набором схем для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления. В способе задания критериев определения помехи для рассматриваемого транспортного средства согласно настоящему варианту осуществления модуль 511 вычисления рисковой скорости (см. фиг. 2) задает диапазон для определения того, является ли или нет обнаруженная за пределами транспортного средства цель помехой, используемой для ограничения скорости рассматриваемого транспортного средства (этот диапазон в дальнейшем называется "диапазоном 3, 3' определения помех"), вместо задания вышеописанных потенциальных рисков.
[0045] Когда путь парковки или выезда рассматриваемого транспортного средства частично включен в заданный диапазон 3, 3' определения помех, модуль 511 вычисления рисковой скорости вычисляет предел скорости и выводит его в модуль 512 формирования целевой скорости. В ответ на информацию о распознавании цели, выводимую из модуля 510 обнаружения цели, модуль 511 вычисления рисковой скорости задает диапазон 3, 3' определения помех на основе результата определения, выводимого из модуля 509 определения присутствия/отсутствия пользователей транспортного средства.
[0046] Левая схема по фиг. 5 иллюстрирует диапазон 3 определения помех, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства, тогда как правая схема по фиг. 5 иллюстрирует диапазон 3' определения помех, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2. Как проиллюстрировано на фиг. 5, диапазон 3 определения помех в том случае, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1, является более узким, чем диапазон 3' определения помех в том случае, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2. То есть, когда цель, обнаруженная модулем 510 обнаружения цели, является пользователем 1, модуль 511 вычисления рисковой скорости задает критерий определения помехи, при котором обнаруженная цель с меньшей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства, по сравнению с тем, когда цель, обнаруженная модулем 510 обнаружения цели, является непользователем 2.
[0047] Как описано выше, в способе задания критериев определения помехи для рассматриваемого транспортного средства согласно настоящему варианту осуществления первый диапазон 3' определения помех или второй диапазон 3 определения помех задается в качестве критерия определения для проведения определения того, является ли или нет обнаруженный за пределами рассматриваемого транспортного средства объект помехой для рассматриваемого транспортного средства. При этом первым диапазоном 3' определения помех называется критерий определения, который задается, когда обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, представляет собой непользователя 2 рассматриваемого транспортного средства, тогда как вторым диапазоном 3 определения помех называется критерий определения, который задается, когда обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, представляет собой пользователя 1 рассматриваемого транспортного средства. При последнем критерии определения (втором диапазоне 3 определения помех) обнаруженный объект, обнаруженный за пределами рассматриваемого транспортного средства, с меньшей вероятностью определяется в качестве помехи для рассматриваемого транспортного средства, чем при первом критерии определения (первом диапазоне 3' определения помех). Это позволяет снизить вероятность того, что пользователь 1 рассматриваемого транспортного средства, который распознает траекторию парковки или выезда рассматриваемого транспортного средства, определяется в качестве помехи для рассматриваемого транспортного средства, тем самым предотвращая ненужное выполнение управления рассматриваемым транспортным средством, чтобы объехать помеху для рассматриваемого транспортного средства. В частности, можно предотвращать ненужное выполнение замедления или остановки транспортного средства во время перемещения транспортного средства.
[0048] Фиг. 6 является схемой для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления. В способе задания критериев определения помехи для рассматриваемого транспортного средства согласно настоящему варианту осуществления, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1, модуль 511 вычисления рисковой скорости (см. фиг. 2) задает потенциальный риск, имеющий распределение с меньшей дисперсией, чем у потенциального риска в том случае, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2. В дополнение к этому, модуль 511 вычисления рисковой скорости задает потенциальный риск в области, которая представляет собой слепую зону из-за рассматриваемого транспортного средства 4 относительно пользователя 1 рассматриваемого транспортного средства 4, присутствующего за пределами рассматриваемого транспортного средства 4 (эта область в дальнейшем называется "слепой зоной 5 "), выше потенциального риска в области, которая не является слепой зоной из-за рассматриваемого транспортного средства 4 относительно пользователя 1 рассматриваемого транспортного средства 4, присутствующего за пределами рассматриваемого транспортного средства 4 (эта область в дальнейшем называется "неслепой зоной 6").
[0049] Таким образом, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства 4, задается критерий определения помехи, при котором обнаруженный объект с меньшей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, представляет собой непользователя 2, а в дополнение к этому, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, присутствует в слепой зоне 5, задается критерий определения помехи, при котором цель с большей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда цель, обнаруженная модулем 510 обнаружения цели, присутствует в неслепой зоне 6. За счет этой операции, когда непользователь 2 присутствует в слепой зоне 5, непользователь 2 с большей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда непользователь 2 присутствует в неслепой зоне 6.
[0050] Фиг. 7 является блок-схемой, иллюстрирующей процедуру помощи при парковке или выезде согласно настоящему варианту осуществления. Управление, представленное этой блок-схемой, начинается, когда включен главный переключатель 40 и дана команда на начало помощи при парковке или помощи при выезде. Во-первых, выполняются этапы S1-S6 блок-схемы, проиллюстрированной на фиг. 4, чтобы задать потенциальный риск, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства 4, либо потенциальный риск, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2 рассматриваемого транспортного средства 4.
[0051] После этапа S6 выполняется этап S11, на котором модуль 511 вычисления рисковой скорости вычисляет слепую зону 5. Затем, на этапе S12, модуль 511 вычисления рисковой скорости определяет, присутствует ли или нет непользователь 2 в слепой зоне 5. При положительном определении далее выполняется этап S13, тогда как при отрицательном определении далее выполняется этап S7.
[0052] На этапе S13 модуль 511 вычисления рисковой скорости задает потенциальный риск для непользователя 2, присутствующего в слепой зоне 5. На этом этапе потенциальный риск для непользователя 2, присутствующего в слепой зоне 5, задается более высоким, чем потенциальный риск для непользователя 2, присутствующего в неслепой зоне 6. Затем выполняются этапы S7-S9 блок-схемы по фиг. 4, и процесс завершается.
[0053] Как описано выше, в способе задания критериев определения помехи для рассматриваемого транспортного средства 4 согласно настоящему варианту осуществления первый критерий определения (первый потенциальный риск) для проведения определения того, является ли или нет непользователь 2 помехой для рассматриваемого транспортного средства 4, задается в соответствии с взаимным относительным расположением между пользователем 1 рассматриваемого транспортного средства 4, присутствующим за пределами рассматриваемого транспортного средства 4, и рассматриваемым транспортным средством 4. Это обеспечивает возможность задания первого критерия определения, подходящего для этой ситуации, когда пользователь 1 рассматриваемого транспортного средства 4 выполняет удаленное управление рассматриваемым транспортным средством 4 снаружи рассматриваемого транспортного средства 4. Например, потенциальный риск для непользователя 2, присутствующего в слепой зоне 5, которая представляет собой слепую зону относительно пользователя 1 из-за рассматриваемого транспортного средства 4, задается выше потенциального риска для непользователя 2, присутствующего в неслепой зоне 6.
[0054] В способе задания критериев определения помехи для рассматриваемого транспортного средства 4 согласно настоящему варианту осуществления, когда пользователь 1 рассматриваемого транспортного средства 4 выполняет удаленное управление рассматриваемым транспортным средством 4 снаружи рассматриваемого транспортного средства 4, потенциальный риск для непользователя 2, присутствующего в слепой зоне 5, которая является слепой зоной относительно пользователя 1 из-за рассматриваемого транспортного средства 4, задается выше потенциального риска для непользователя 2, присутствующего в неслепой зоне 6, и за счет этого можно надлежащим образом задавать предел скорости для рассматриваемого транспортного средства 4, которым управляют под удаленным управлением с перемещением в слепой зоне 5 относительно пользователя 1. В частности, можно надлежащим образом выполнять замедление или остановку транспортного средства во время перемещения транспортного средства.
[0055] Фиг. 8 является схемой для описания способа задания критериев определения помехи для рассматриваемого транспортного средства согласно другому варианту осуществления. В способе задания критериев определения помехи согласно настоящему варианту осуществления, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства 4, модуль 511 вычисления рисковой скорости (см. фиг. 2) задает потенциальный риск, имеющий распределение с меньшей дисперсией, чем у потенциального риска, когда цель, обнаруженная модулем 510 обнаружения цели, представляет собой непользователя 2. В дополнение к этому, модуль 511 вычисления рисковой скорости задает потенциальный риск в области (слепой зоне) 5, которая представляет собой слепую зону из-за рассматриваемого транспортного средства 4 относительно пользователя 1 рассматриваемого транспортного средства 4, присутствующего за пределами рассматриваемого транспортного средства 4, выше потенциального риска в области (неслепой зоне) 6, которая не представляет собой слепую зону из-за рассматриваемого транспортного средства 4 относительно пользователя 1 рассматриваемого транспортного средства 4, присутствующего за пределами рассматриваемого транспортного средства 4. Кроме того, модуль 511 вычисления рисковой скорости задает потенциальный риск на пути 7 парковки или выезда рассматриваемого транспортного средства 4 более высоким, чем потенциальный риск в области, которая не перекрывает путь 7 парковки или выезда рассматриваемого транспортного средства 4. Здесь "путь парковки или выезда" означает полосковую область, имеющую ширину, эквивалентную ширине транспортного средства, а не линию.
[0056] То есть, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, представляет собой пользователя 1 рассматриваемого транспортного средства 4, задается критерий определения помехи, при котором обнаруженный объект с меньшей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, представляет собой непользователя 2, а в дополнение к этому, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, присутствует в слепой зоне 5, задается критерий определения помехи, при котором обнаруженный объект с большей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, присутствует в неслепой зоне 6. Кроме того, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, присутствует в области пути 7 парковки или выезда рассматриваемого транспортного средства 4, задается критерий определения помехи, при котором обнаруженный объект с большей вероятностью определяется в качестве помехи, используемой для ограничения скорости рассматриваемого транспортного средства 4, по сравнению с тем, когда обнаруженный объект, обнаруженный за пределами транспортного средства модулем 510 обнаружения цели, присутствует в области, отличной от пути 7 парковки или выезда. Это обеспечивает возможность осуществления операции парковки или выезда рассматриваемого транспортного средства 4 в соответствии с ситуацией. Например, когда непользователь 2 присутствует в слепой зоне 5 и в области пути 7 парковки или выезда, предел скорости для рассматриваемого транспортного средства 4 задается более низким, чем предел скорости, когда непользователь 2 присутствует в неслепой зоне 6 или в области, отличной от пути 7 парковки или выезда, в слепой зоне 5.
[0057] Поясненные выше варианты осуществления описаны для того, чтобы способствовать пониманию настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Поэтому подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, охватывают все конструктивные модификации и эквиваленты, которые попадают в пределы технического объема настоящего изобретения.
[0058] Например, в вышеописанных вариантах осуществления настоящее изобретение описано со ссылкой на устройство 100 помощи при парковке и выезде, но настоящее изобретение может применяться в устройстве, которое осуществляет одну из помощи при парковке и помощи при выезде. Кроме того, настоящее изобретение не ограничено применением к помощи при парковке и помощи при выезде и может применяться в устройстве помощи при движении, которое осуществляет помощь при движении, когда водитель или пассажир присутствует за пределами транспортного средства.
Описание ссылочных номеров
[0059] 1 - пользователь транспортного средства (водитель или пассажир)
2 - непользователь транспортного средства
3 - диапазон определения
3' - диапазон определения
4 - рассматриваемое транспортное средство
5 - слепая зона
6 - неслепая зона
7 - путь парковки или выезда
50 - ЭБУ помощи при парковке и выезде
100 – устройство помощи при парковке и выезде
Устройство для улучшения поведения транспортного средства при рулении
Устройство управления прекращением медленного передвижения для электромобиля
Конструкция для упрочнения панели кузова автомобиля
Устройство управления эффективной мощностью для двигателя внутреннего сгорания и способ управления эффективной мощностью для двигателя внутреннего сгорания
Устройство управления аккумуляторной батареей
Устройство помощи в управлении транспортным средством
Внутренняя панель капота
Установка для излучения звуков оповещения транспортного средства
Транспортное средство
Преобразователь крутящего момента
Способ для управления указателем поворота и устройство для управления указателем поворота
Способ управления движением и устройство управления движением для транспортного средства
Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством
Способ управления парковкой и аппаратура управления парковкой

