Результат интеллектуальной деятельности: СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ УПРАВЛЯЕМЫМ БОЕПРИПАСОМ В СЛОЖНОЙ ФОНОЦЕЛЕВОЙ ОБСТАНОВКЕ
Вид РИД
Изобретение
Изобретение относится к вооружению, в частности, к системам огневого поражения объектов управляемыми боеприпасами (УБП).
Известен способ поражения объектов ракетой с телевизионной системой наведения (см., например, Юхно П.М. Преднамеренные оптические помехи высокоточному оружию. Монография. - М.: Радиотехника, 2017. стр. 433, 465-468), основанный на определении пространственных координат района местоположения цели, запуске УБП и выводе его в район местоположения цели, съемке с борта УБП участка района местоположения цели, формировании матрицы параметров кадра изображения участка района местоположения цели и передаче ее значения в бортовой вычислитель УБП, обработке значений матрицы параметров кадра изображения участка района местоположения цели и по ее результату выделении параметров цели и корректировке полета УБП на цель.
Основным недостатком способа является возможность срыва наведения УБП на цель, обусловленная ростом вероятности необнаружения и нераспознавания объекта, подлежащего поражению, в сложной фоноцелевой обстановке.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности поражения объектов УБП в сложной фоноцелевой обстановке.
Технический результат достигается тем, что в известном способе поражения цели УБП в сложной фоноцелевой обстановке, основанном на определении пространственных координат района местоположения цели, используют матрицу геоинформационных параметров изображения района местоположения цели и на ее основе формируют бинарную матрицу геоинформационных параметров изображения района местоположения цели с порогом бинаризации, исключающим из анализа изображения района местоположения цели участки, где цель по своим тактико-физическим свойствам находиться не может, вносят значения бинарной матрицы геоинформационных параметров изображения района местоположения цели в бортовой вычислитель УБП, осуществляют запуск УБП и вывод его в район местоположения цели, производят с борта УБП съемку участка района местоположения цели, формируют матрицу параметров кадра изображения участка района местоположения цели для j-го момента времени и передают ее значения в бортовой вычислитель УБП,  - номер текущего момента времени, N - количество моментов времени, на борту УБП определяют координаты его местоположения для j-ого момента времени и пространственные параметры съемки участка района местоположения цели для j-го момента времени, передают их значения в бортовой вычислитель УБП и формируют элемент бинарной матрицы геоинформационных параметров кадра изображения участка района местоположения для j-го момента времени, формируют матрицу свертки параметров кадра изображения участка района местоположения цели для j-го момента времени путем перемножения значений матрицы кадра изображения участка района местоположения цели для j-го момента времени и элемента бинарной матрицы геоинформационных параметров кадра изображения участка района местоположения цели для j-го момента времени, осуществляют обработку значений матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени и по ее результату выделяют параметры цели и корректируют полет УБП на цель, повторяют процедуры для j+1-ого момента времени от формирования матрицы параметров кадра изображения участка района местоположения цели до осуществления обработки значений матрицы свертки параметров кадра изображения участка района местоположения цели для j+1-го момента времени и по ее результату выделении параметров цели и корректировки полета УБП на цель.
- номер текущего момента времени, N - количество моментов времени, на борту УБП определяют координаты его местоположения для j-ого момента времени и пространственные параметры съемки участка района местоположения цели для j-го момента времени, передают их значения в бортовой вычислитель УБП и формируют элемент бинарной матрицы геоинформационных параметров кадра изображения участка района местоположения для j-го момента времени, формируют матрицу свертки параметров кадра изображения участка района местоположения цели для j-го момента времени путем перемножения значений матрицы кадра изображения участка района местоположения цели для j-го момента времени и элемента бинарной матрицы геоинформационных параметров кадра изображения участка района местоположения цели для j-го момента времени, осуществляют обработку значений матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени и по ее результату выделяют параметры цели и корректируют полет УБП на цель, повторяют процедуры для j+1-ого момента времени от формирования матрицы параметров кадра изображения участка района местоположения цели до осуществления обработки значений матрицы свертки параметров кадра изображения участка района местоположения цели для j+1-го момента времени и по ее результату выделении параметров цели и корректировки полета УБП на цель.
Сущность изобретения заключается в использовании для наведения УБП изображения района местоположения цели, сформированного с учетом параметров геообстановки района, исключающих из анализа участки изображения, характеризующих невозможность размещения на местности цели по своим тактико-физическим свойствам.
Поражение объектов может осуществляться УБП, использующими различные системы наведения. Одной из них является система самонаведения, по телевизионному (тешювизионному) изображению (см., например, Юхно П.М. Преднамеренные оптические помехи высокоточному оружию. Монография. - М.: Радиотехника, 2017. стр. 433, 465-468). Ключевым элементом успешного функционирования таких систем является выделение цели на изображении из совокупности других объектов. Этот процесс не исключает ошибки, обусловленные наличием объектов схожих по светоконтрастным параметрам с целью. Как правило, по своим тактико-физическим свойствам цель имеет пространственное ограничение размещения на местности, которое отражается в элементах геобстановки. Геоинформация о районе местоположения позволяет исключить из анализа на телевизионном (тепловизионном) изображении участки, на которых местоположение цели маловероятно. Поэтому в интересах снижения вероятности перенацеливания при наведении УБП на ложные цели предлагается использование дополнительного информационного поля, включающего в себя данные геообстановки в области пространства размещения поражаемого объекта.
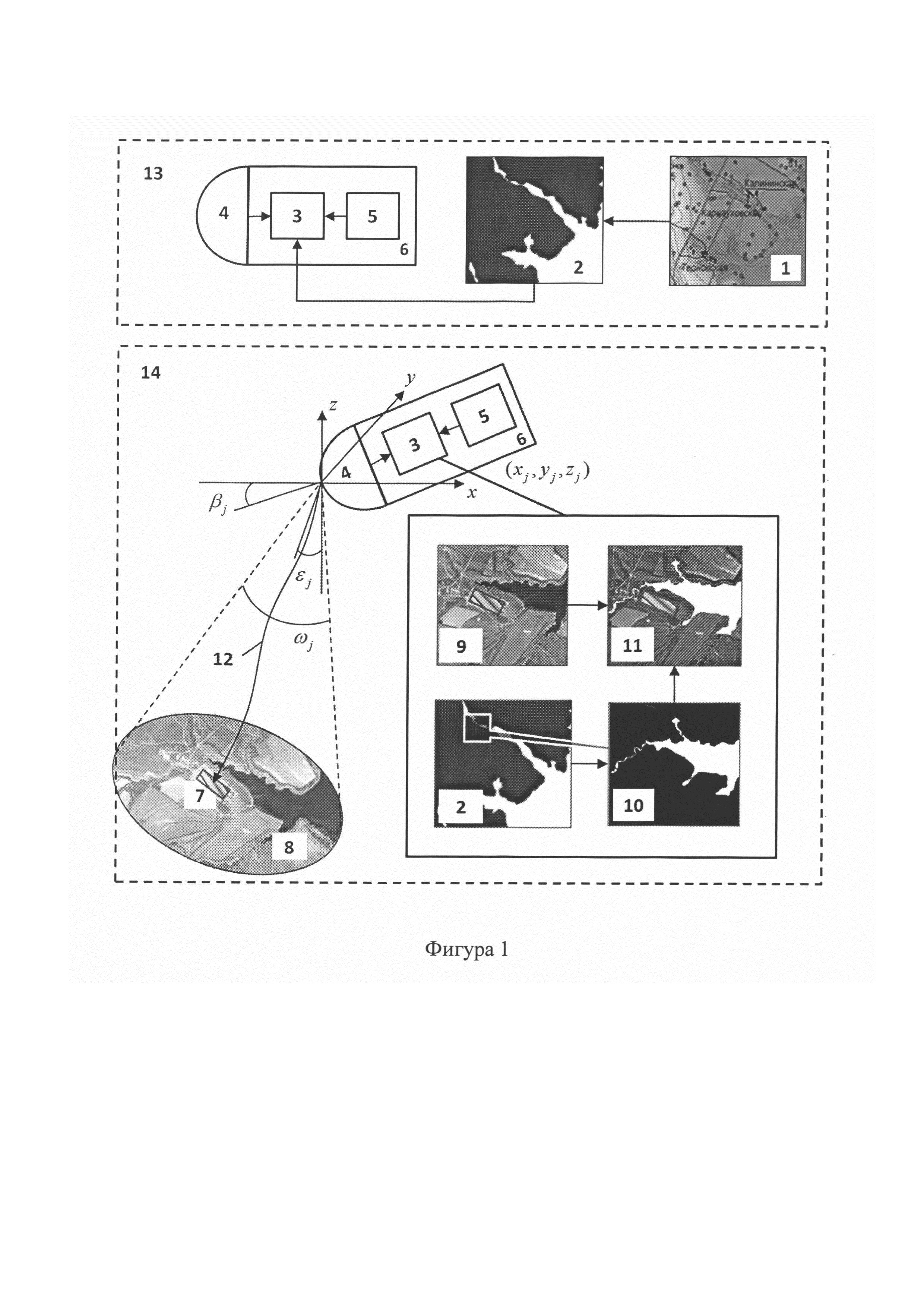
На фигуре 1 представлены схемы, поясняющие сущность способа, где приняты следующие обозначения: 1 - геоинформационное изображение района ожидаемого местоположения цели; 2 - бинарное геоинформационное изображения района ожидаемого местоположения цели; 3 - бортовой вычислитель УБП; 4 - телевизионная (тепловизионная) головка самонаведения ТВГСН (ТПВГСН) УБП; 5 - блок определения координат местоположения УБП; 7 - цель; 6 - УБП; 8 - участок района местоположения цели, съемку которого осуществляет ТВГСН (ТПВГСН) УБП; 9 - изображение кадра участка района местоположения цели, получаемое ТВГСН (ТПВГСН) УБП; 10 - изображение кадра бинарного геоинформационного изображения участка района местоположения цели; 11 - изображение кадра участка района местоположения цели; получаемое перемножение кадра изображения участка района местоположения цели для и кадра бинарного геоинформационного изображения участка района местоположения цели; 12 - траектория полета УБП; 13 - этап подготовки УБП к применению; 14 - этап наведения УБП на цель; (xj,уj,zj), βj, εj - координаты местоположения УБП, угол места и азимут ориентации его ТВГСН (ТПВГСН) в j-ый момент времени; ωj - угол поля зрения ТВГСН (ТПВГСН) УБП в j-ый момент времени, где - номер текущего момента времени, N - количество моментов времени.
Предлагаемый способ предусматривает следующий порядок действий. Предварительно на этапе подготовки УБП к применению 13 в бортовой вычислитель 3 УБП 6 вносят координаты положения ожидаемого района местоположения цели 7. Далее, используя матрицу геоинформационных параметров изображения района местоположения цели 1 формируют бинарную матрицу 2 (на фигуре 1 элементы разрешения со значением «1» обобщены черным цветом, а элементы разрешения со значением «0» - белым цветом). При этом порог бинаризации исключает из анализа изображения района местоположения цели участки, где цель по своим тактико-физическим свойствам не может находиться (водоемы, болотная местность, горные образования, оперативно-тактические условия боевого применения цели и т.д.). Вносят значения бинарной матрицы геоинформационных параметров изображения района местоположения цели 2 в бортовой вычислитель 3 УБП 6. Осуществляют запуск УБП 6 и вывод его в район местоположения цели 8. На этапе наведения УБП на цель 14 производят ТВГСН (ТПВГСН) 4 УБП 6 съемку участка района местоположения цели 8 и формируют матрицу параметров кадра его изображения 9 для j-го момента времени. Определяют координаты блоком определения координат местоположение УБП 5 в пространстве (xj,уj,zj) для j-ого момента времени, а также и пространственные параметры съемки ТВГСН (ТПВГСН) βj, εj, ωj участка района местоположения цели для j-го момента времени. Передают полученные значения пространственных параметров в бортовой вычислитель 3. При этом пространственные параметры (xj,уj,zj), βj, εj, ωj позволяют выделить и масштабировать элемент (кадр) бинарного геоинформационного изображения района местоположения цели 10 соизмеримого с кадром изображения участка района местоположения цели 9 для j-го момента времени. По полученным данным бортовой вычислитель 3 УБП формирует элемент бинарной матрицы геоинформационных параметров кадра 10 изображения участка района местоположения 2 для j-го момента времени, а также перемножением кадра изображения участка района местоположения цели 9 для j-го момента времени и кадра геоинформационного изображения участка района местоположения цели 10 для j-го момента времени формирует матрицу свертки параметров кадра изображения участка района местоположения цели 11 для j-го момента времени. Параметры полученного изображения 11 обрабатывают (при этом могут использоваться разные алгоритм обработки: однопороговые, двух и более пороговые, по балансу областей и др.), по ее результату выделяют параметры цели 7 и корректируют полет УБП в цель 12. Для кадра изображения участка района местоположения цели, полученного в j+1-ый момент времени, процедуры аналогичны, как для j-го момента времени.
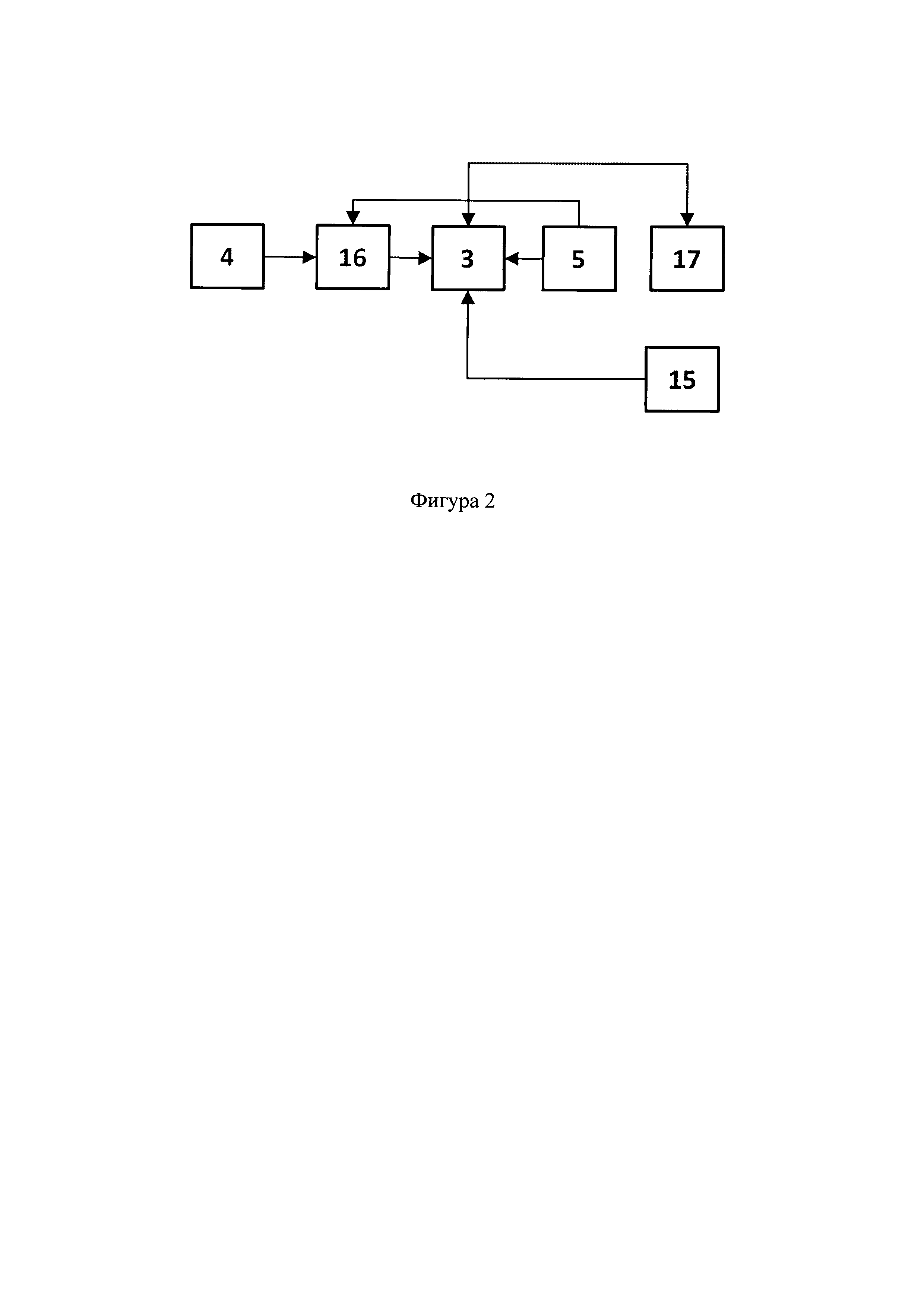
На фигуре 2 изображена блок схема устройства, реализующего способ. Блок - схема включает: 15 ЭВМ, 16 блок датчиков ТВГСН (ТПВГСН), блоки управления полетом УБП 17, остальные блоки соответствуют фигуре 1.
Устройство работает следующим образом. 15 ЭВМ 15, используя программно реализованные модели, растровое изображение геоинформационной карты района местоположения цели преобразует в бинарное изображение, параметры которого передает в бортовой вычислитель 3. Блок датчиков ТВГСН (ТПВГСН) 16 измеряет параметры работы ТВГСН (ТПВГСН) 4 УБП. Блок определения координат местоположения УБП 5 в пространстве определяет координаты местоположение УБП и передает их значение в бортовой вычислитель 3, а также выдает команду блоку датчиков ТВГСН (ТПВГСН) 16 на передачу изображения и параметров его получения в бортовой вычислитель 3. Бортовой вычислитель 3 на основе полученных данных осуществляет необходимые вычислительные операции и по их результату формирует сигналы исполнительным блокам для корректировки полета УБП 17 в цель.
Таким образом, у заявляемого способа появляются свойства повышения эффективности поражения цели УБП в сложной фоноцелевой обстановке за счет исключения из анализа части параметров изображения района местоположения цели, характеризующих невозможность по своим тактико-физическим свойствам размещение цели на местности. Тем самым, предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ поражения цели УБП в сложной фоноцелевой обстановке, основанный на определении пространственных координат района местоположения цели, использовании матрицы геоинформационных параметров изображения района местоположения цели и на ее основе формировании бинарной матрицы геоинформационных параметров изображения района местоположения цели с порогом бинаризации, исключающей из анализа изображения района местоположения цели участки, где цель по своим тактико-физическим свойствам не может находиться, внесении значений бинарной матрицы геоинформационных параметров изображения района местоположения цели в бортовой вычислитель УБП, осуществлении запуска УБП и выводе его в район местоположения цели, произведении с борта УБП съемки участка района местоположения цели, формировании матрицы параметров кадра изображения участка района местоположения цели для j-го момента времени и передачи ее значений в бортовой вычислитель УБП, где - номер текущего момента времени, N - количество моментов времени, на борту УБП определении координат его местоположения для j-ого момента времени и пространственных параметров съемки участка района местоположения цели для j-го момента времени, передачи их значений в бортовой вычислитель УБП и формировании элемента бинарной матрицы параметров кадра геоинформационного изображения участка района местоположения для j-го момента времени, формировании матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени путем перемножения значений матрицы кадра изображения участка района местоположения цели для j-го момента времени и элемента бинарной матрицы параметров кадра геоинформационного изображения участка района местоположения цели для j-го момента времени, осуществлении обработки значений матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени и по ее результату выделении параметров цели и корректировке полета УБП в цель, повторении процедур для j+1-ого момента времени от формирования матрицы параметров кадра изображения участка района местоположения цели до осуществления обработки значений матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени и по ее результату выделении параметров цели и корректировке полета УБП в цель, включительно.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые электротехнические узлы и устройства.
Способ поражения цели управляемым боеприпасом в сложной фоноцелевой обстановке, основанный на определении пространственных координат района местоположения цели, отличающийся тем, что используют матрицу параметров геоинформационного изображения района местоположения цели и на ее основе формируют бинарную матрицу параметров геоинформационного изображения района местоположения цели с порогом бинаризации, исключающим из анализа изображения района местоположения цели участки, где цель по своим физическим свойствам находиться не может, вносят значения бинарной матрицы параметров геоинформационного изображения района местоположения цели в бортовой вычислитель управляемого боеприпаса, осуществляют запуск управляемого боеприпаса и вывод его в район местоположения цели, производят с борта управляемого боеприпаса съемку участка района местоположения цели, формируют матрицу параметров кадра изображения участка района местоположения цели для j-го момента времени и передают ее значения в бортовой вычислитель управляемого боеприпаса, где - номер текущего момента времени, N - количество моментов времени, на борту управляемого боеприпаса определяют координаты его местоположения для j-го момента времени и пространственные параметры съемки участка района местоположения цели для j-го момента времени, передают их значения в бортовой вычислитель управляемого боеприпаса и формируют элемент бинарной матрицы параметров кадра геоинформационного изображения участка района местоположения для j-го момента времени, формируют матрицу свертки параметров кадра изображения участка района местоположения цели для j-го момента времени путем перемножения значений матрицы кадра изображения участка района местоположения цели для j-го момента времени и элемента бинарной матрицы параметров кадра геоинформационного изображения участка района местоположения цели для j-го момента времени, осуществляют обработку значений матрицы свертки параметров кадра изображения участка района местоположения цели для j-го момента времени и по ее результату выделяют параметры цели и корректируют полет управляемого боеприпаса в цель, повторяют процедуры для j+1-го момента времени от формирования матрицы параметров кадра изображения участка района местоположения цели до осуществления обработки значений матрицы свертки параметров кадра изображения участка района местоположения цели для j+1-го момента времени и по ее результату выделяют параметры цели и корректировки полета УБП на цель.
Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике
Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике
Беспилотный медицинский комплекс
Противобуксовочное устройство
Обувь
Способ анализа сложных сигналов в автокорреляционном приемнике
Способ учета ветра при применении авиационных бомб
Устройство регулирования частоты автономного синхронного генератора электроагрегата
Пистолет-распылитель
Способ помехозащиты оптико-электронных средств от мощных лазерных комплексов
Способ скрытия оптико-электронного средства воздушного комплекса оптико-электронного наблюдения

