Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к системе управления двигателем внутреннего сгорания, включающей в себя эталонный регулятор.
Уровень техники
Известны устройства управления, которые корректируют целевое значение управляющего вывода с помощью эталонного регулятора таким образом, чтобы увеличивать степень удовлетворения ограничивающего условия (например, публикация заявки на патент Японии № 2017-020357 (JP 2017-020357 А), публикация заявки на патент Японии № 2017-101627 (JP 2017-101627 А) и публикация заявки на патент Японии № 2016-169688 (JP 2016-169688 А)). Например, в эталонных регуляторах, раскрытых в JP 2017-020357 А, JP 2017-101627 А и JP 2016-169688 А, целевые значения давления наддува и EGR-пропорции корректируются таким образом, чтобы увеличивать степень удовлетворения ограничивающих условий относительно давления наддува и EGR-пропорции двигателя внутреннего сгорания.
Из этих эталонных регуляторов, эталонный регулятор, раскрытый в JP 2017-020357 А, использует модель прогнозирования для того, чтобы выполнять будущее прогнозирование относительно давления наддува и EGR-пропорции, когда целевые значения давления наддува и EGR-пропорции задаются в качестве предварительных целевых значений. Помимо этого, эталонный регулятор корректирует предварительные целевые значения посредством использования прогнозированных значений давления наддува и EGR-пропорции таким образом, чтобы увеличивать степень удовлетворения ограничивающих условий относительно давления наддува и EGR-пропорции. Посредством повторения такой операции, эталонный регулятор многократно корректирует предварительные целевые значения, чтобы вычислять конечные предварительные целевые значения и задавать конечные предварительные целевые значения в качестве целевых значений давления наддува и EGR-пропорции.
Сущность изобретения
Теперь, в случае выполнения будущего прогнозирования относительно управляющего вывода, такого как давление наддува и EGR-пропорция, например, следует понимать, что модель прогнозирования извлекается заранее при условии, что вторичная задержка возникает в ответ на управляющий вывод, и модель прогнозирования используется в ходе работы транспортного средства для того, чтобы вычислять будущее прогнозное значение управляющего вывода. В такой модели прогнозирования, в общем, следует понимать, что будущее прогнозное значение вычисляется при условии, что начальное значение темпа изменения управляющего вывода равно нулю.
Тем не менее, управляющий вывод, такой как давление наддува и EGR-пропорция, зачастую является переменным в ходе работы двигателя внутреннего сгорания. Соответственно, когда будущее прогнозное значение вычисляется при условии, что начальное значение темпа изменения равно нулю, затруднительно вычислять будущее прогнозное значение управляющего вывода с достаточной точностью. Когда будущее прогнозное значение управляющего вывода вычисляется с низкой точностью, это может приводить к ситуации, в которой оптимальное целевое значение управляющего вывода не является вычисляемым.
Настоящее изобретение относится к системе управления двигателем внутреннего сгорания, которая вычисляет целевое значение управляющего вывода с использованием эталонного регулятора, в котором вычисляется оптимальное целевое значение.
Настоящее изобретение осуществлено для того, чтобы разрешать вышеуказанную проблему, как обобщено ниже.
Первый аспект настоящего изобретения представляет собой систему управления двигателем внутреннего сгорания. Система управления включает в себя электронный модуль управления, включающий в себя контроллер с обратной связью и эталонный регулятор. Контроллер с обратной связью выполнен с возможностью определять значение управляющего ввода таким образом, что значение управляющего вывода приближается к целевому значению. Эталонный регулятор выполнен с возможностью вычислять, с помощью модели прогнозирования, прогнозированное максимальное значение величины перерегулирования управляющего вывода из целевого значения, на основе текущего значения управляющего вывода, предварительного целевого значения управляющего вывода и текущего темпа изменения управляющего вывода. Модель прогнозирования извлекается при условии, что n-ая задержка (n является натуральным числом) возникает в отклике управляющего вывода. Эталонный регулятор выполнен с возможностью вычислять целевое значение посредством коррекции предварительного целевого значения управляющего вывода на основе прогнозированного максимального значения таким образом, чтобы увеличивать степень удовлетворения ограничивающего условия относительно управляющего вывода.
В системе управления, модель прогнозирования может извлекаться при условии, что вторичная задержка возникает в отклике управляющего вывода.
В системе управления, эталонный регулятор может быть выполнен с возможностью вычислять прогнозированное максимальное значение посредством использования, в качестве модели прогнозирования, выражений (1), (2) следующим образом:

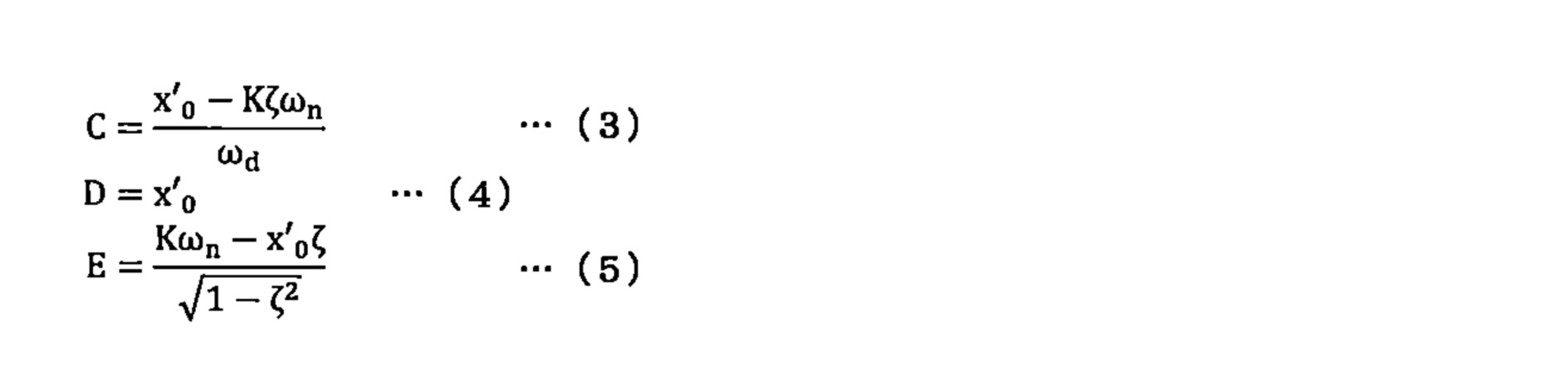
где OSmax может представлять прогнозированное максимальное значение, r(t) может представлять предварительное целевое значение управляющего вывода, и x(t) может представлять текущее значение управляющего вывода в выражении (1), ζ может представлять коэффициент демпфирования, ωn может представлять собственную угловую частоту, и tos может представлять максимальное время, когда величина перерегулирования прогнозируется в качестве максимума в выражении (2), и C, D, E могут задаваться посредством выражений (3), (4), (5) следующим образом:

где K может представлять усиление, и x'0 может представлять текущий темп изменения управляющего вывода в выражениях (3), (4), (5), и ωd может задаваться посредством последующего выражения (6).
В системе управления, максимальное время tos может вычисляться посредством выражения (7) следующим образом:


где tos может представлять максимальное время в выражении (7), и ϕ может задаваться посредством последующего выражения (8).
В системе управления, эталонный регулятор может быть выполнен с возможностью вычислять целевое значение посредством коррекции предварительного целевого значения управляющего вывода таким образом, что значение целевой функции становится меньшим. Значение целевой функции может определяться с учетом степени удовлетворения ограничивающего условия относительно управляющего вывода. Значение целевой функции может вычисляться таким образом, что по мере того, как прогнозированное максимальное значение, вычисленное посредством эталонного регулятора, становится большим за рамками верхнего предела, степень удовлетворения ограничивающего условия становится более низкой, и значение целевой функции становится большим.
В системе управления, значение, по меньшей мере, одного параметра, используемого в модели прогнозирования, может изменяться в зависимости от усиления системы управления в контроллере с обратной связью.
Система управления дополнительно может включать в себя двигатель внутреннего сгорания, включающий в себя нагнетатель. Электронный модуль управления может управлять двигателем внутреннего сгорания, и управляющий вывод может включать в себя давление наддува.
Система управления дополнительно может включать в себя двигатель внутреннего сгорания, включающий в себя систему рециркуляции выхлопных газов, которая подает часть выхлопных газов во впускной канал. Электронный модуль управления может управлять двигателем внутреннего сгорания, и управляющий вывод может включать в себя пропорцию рециркуляции выхлопных газов.
Система управления дополнительно может включать в себя двигатель внутреннего сгорания, включающий в себя сажевый фильтр, который улавливает мелкие частицы в выхлопных газах. Электронный модуль управления может управлять двигателем внутреннего сгорания, и управляющий вывод может включать в себя температуру сажевого фильтра.
Система управления дополнительно может включать в себя двигатель внутреннего сгорания, включающий в себя устройство управления давлением топлива, которое управляет давлением топлива, подаваемого в клапан впрыска топлива, который впрыскивает топливо в камеру сгорания. Электронный модуль управления может управлять двигателем внутреннего сгорания, и управляющий вывод может включать в себя давление топлива.
Настоящее изобретение относится к системе управления, которая вычисляет целевое значение управляющего вывода с использованием эталонного регулятора, в котором может вычисляться оптимальное целевое значение.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
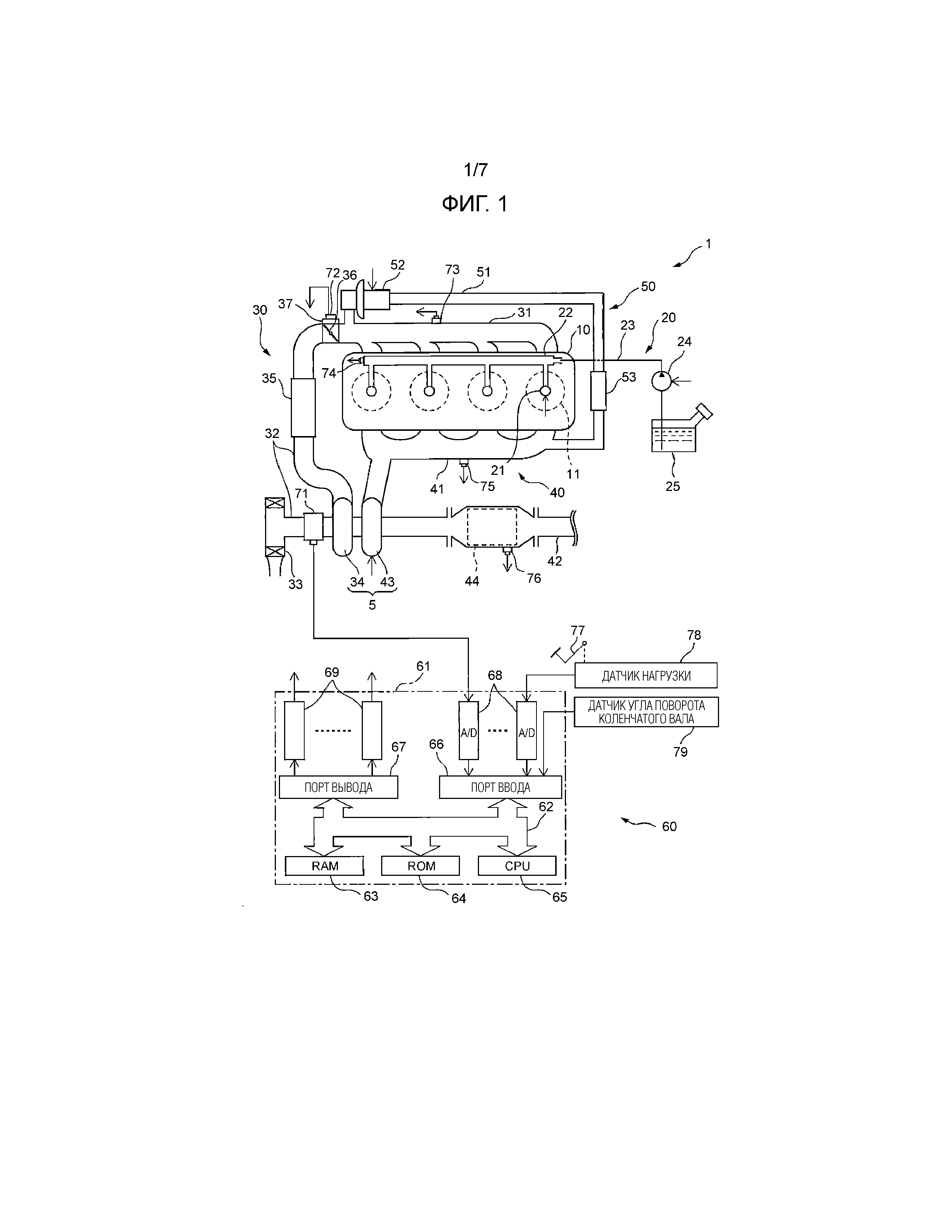
Фиг. 1 является принципиальной блок-схемой двигателя внутреннего сгорания, который использует устройство управления согласно одному варианту осуществления;
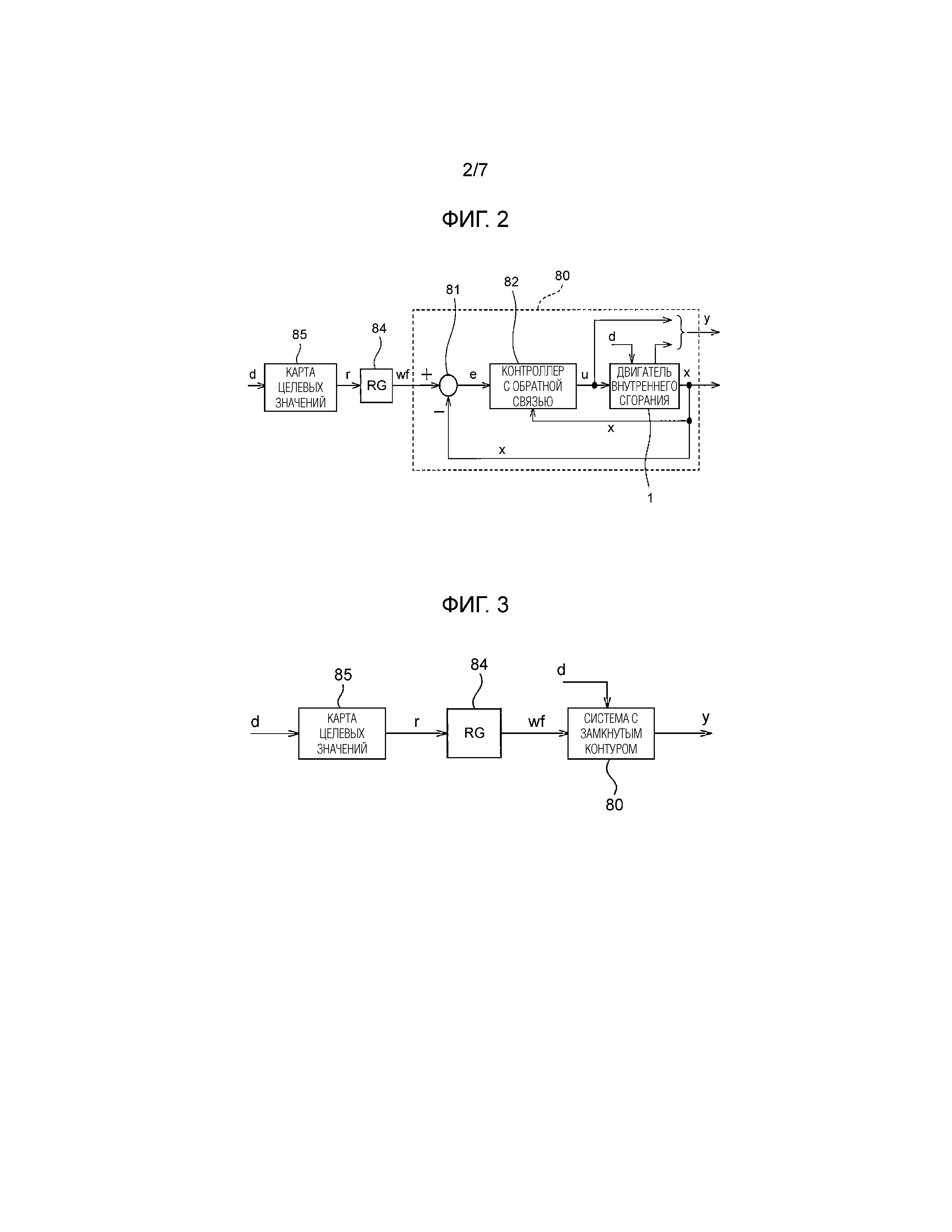
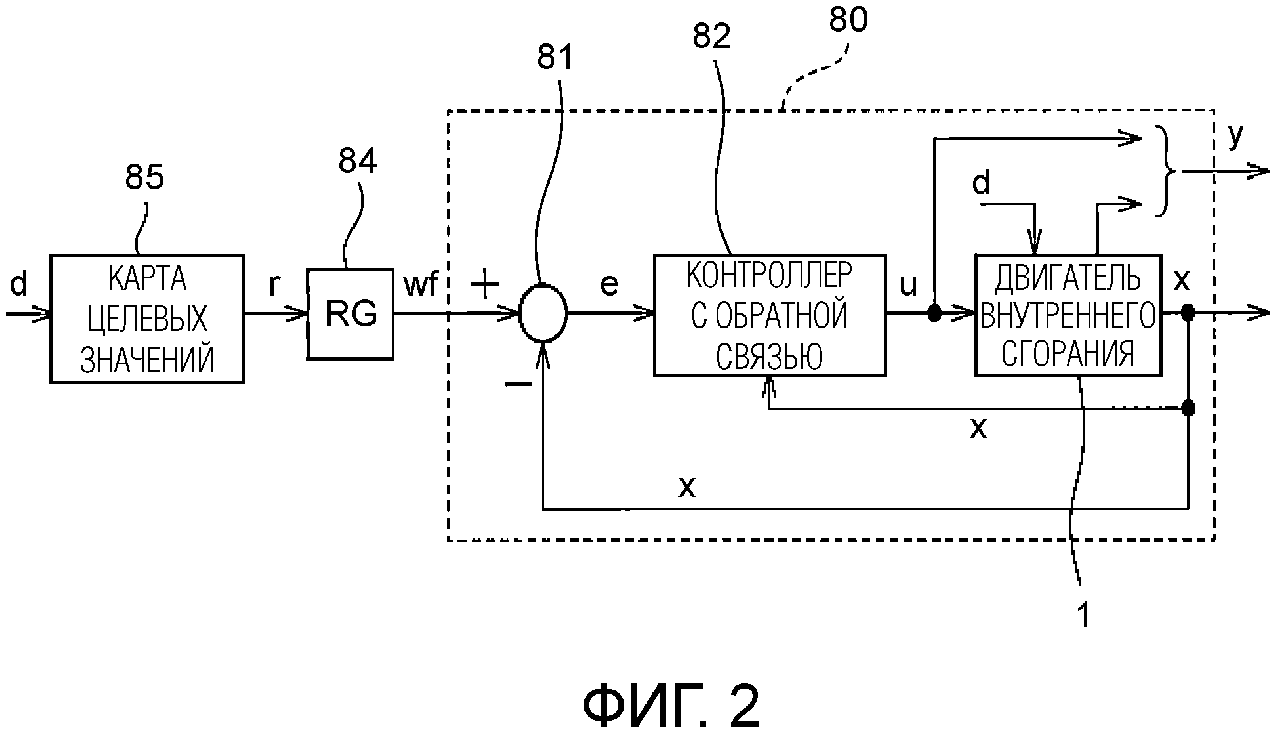
Фиг. 2 является блок-схемой, схематично показывающей управление, выполняемое в устройстве управления;
Фиг. 3 показывает управляющую структуру с прямой связью, полученную посредством эквивалентной деформации управляющей структуры по фиг. 2;
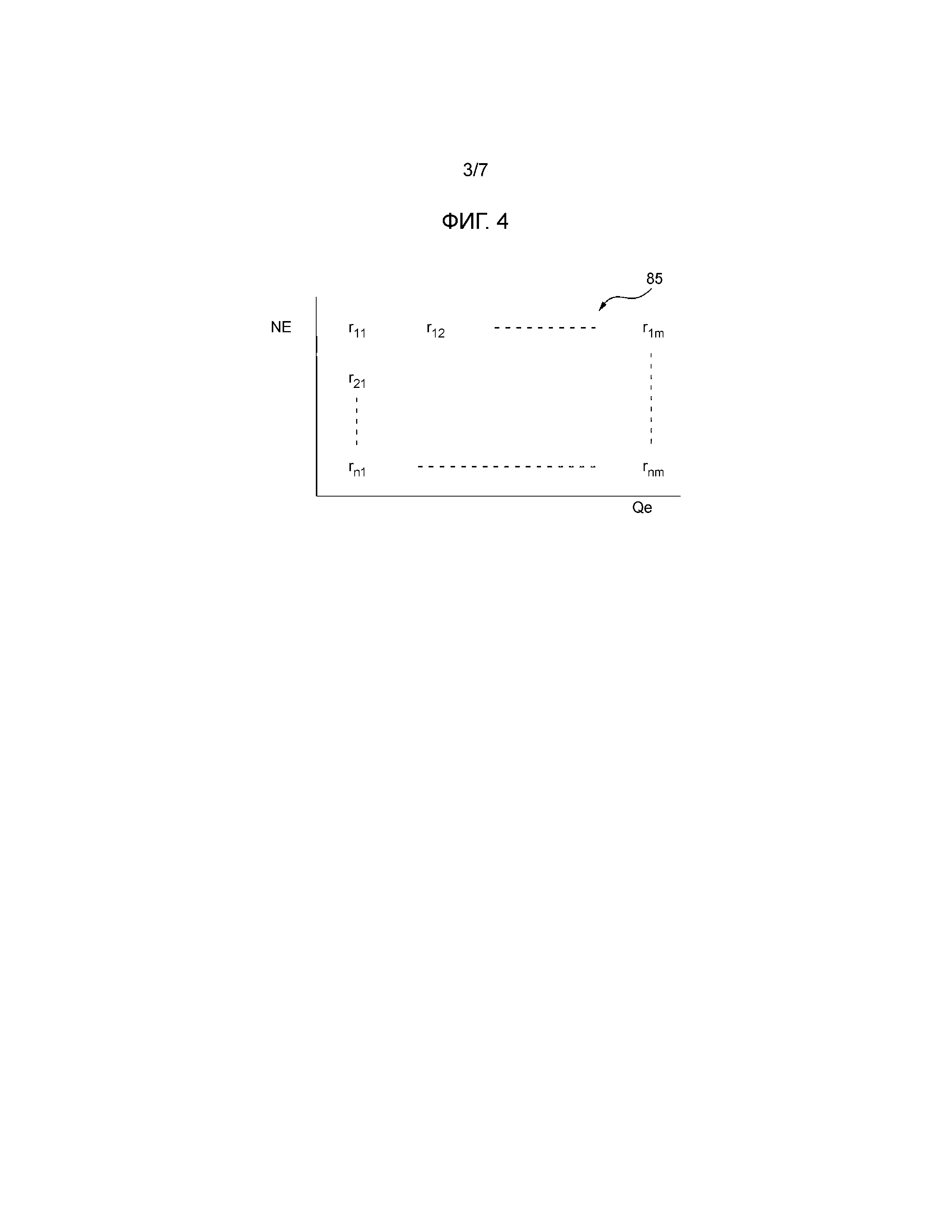
Фиг. 4 является картой для вычисления временного целевого значения на основе частоты вращения двигателя и объема впрыска топлива;
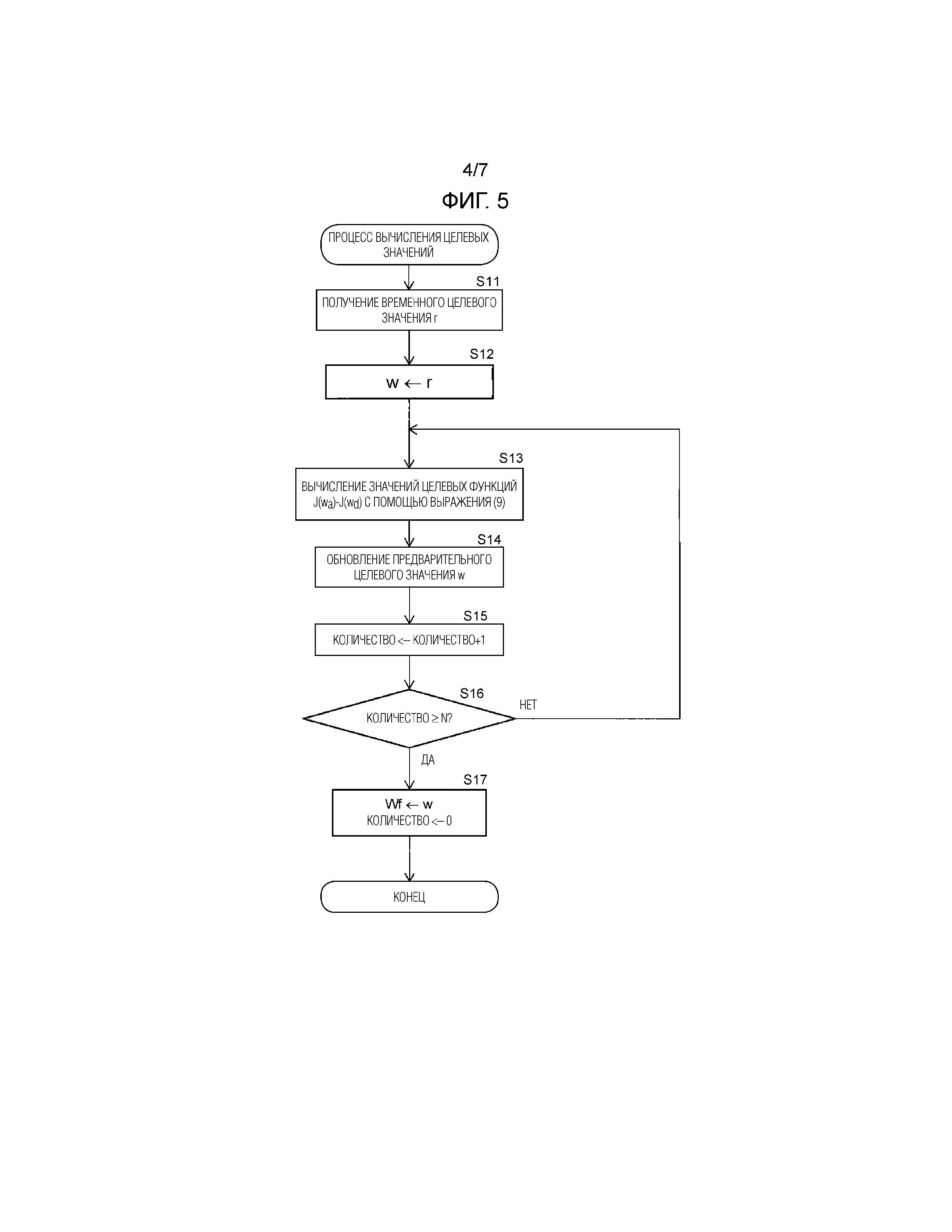
Фиг. 5 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для процесса вычисления целевых значений в одном варианте осуществления;
Фиг. 6 является временной диаграммой, показывающей фактическое давление наддува, которое изменяется с изменением целевого значения давления наддува;
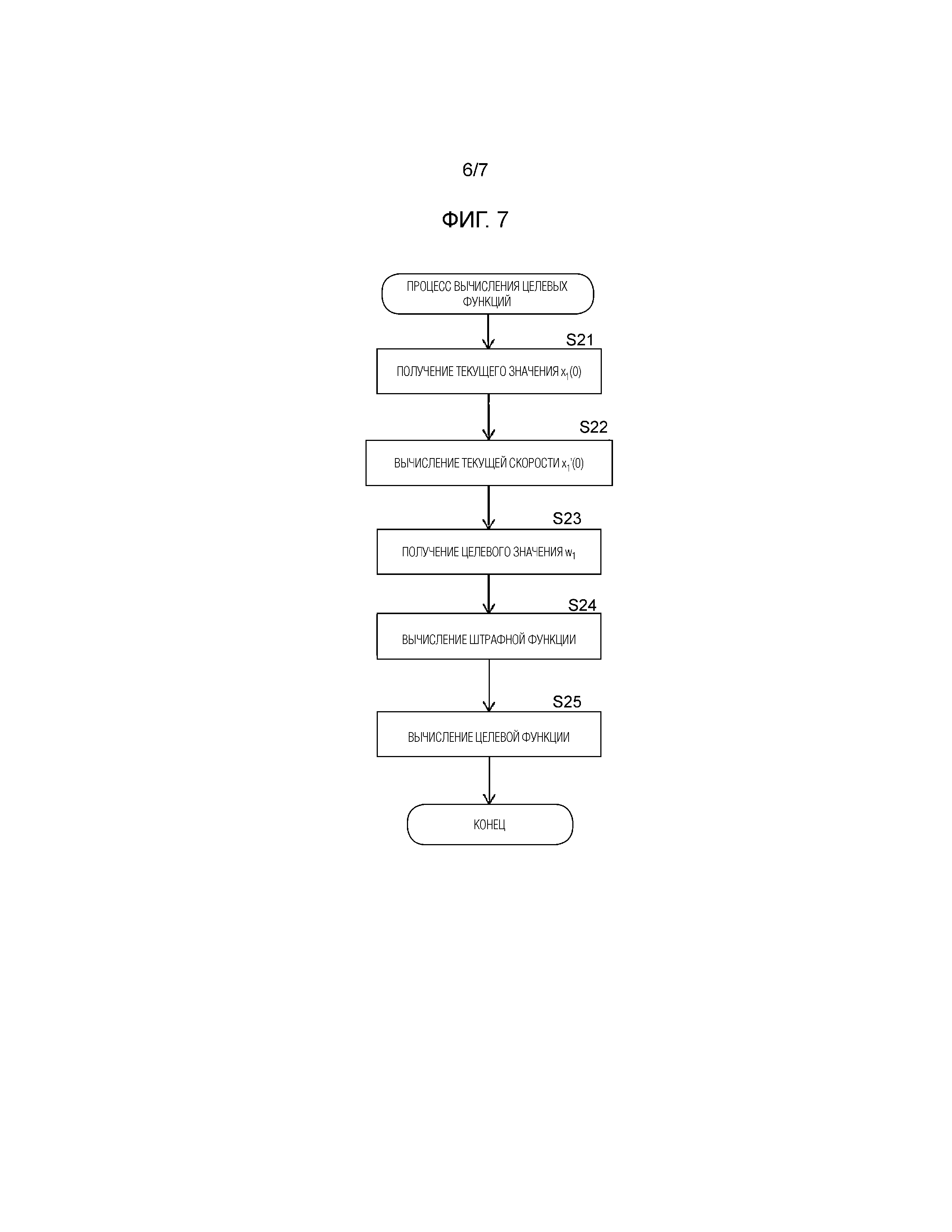
Фиг. 7 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для процесса вычисления целевой функции;
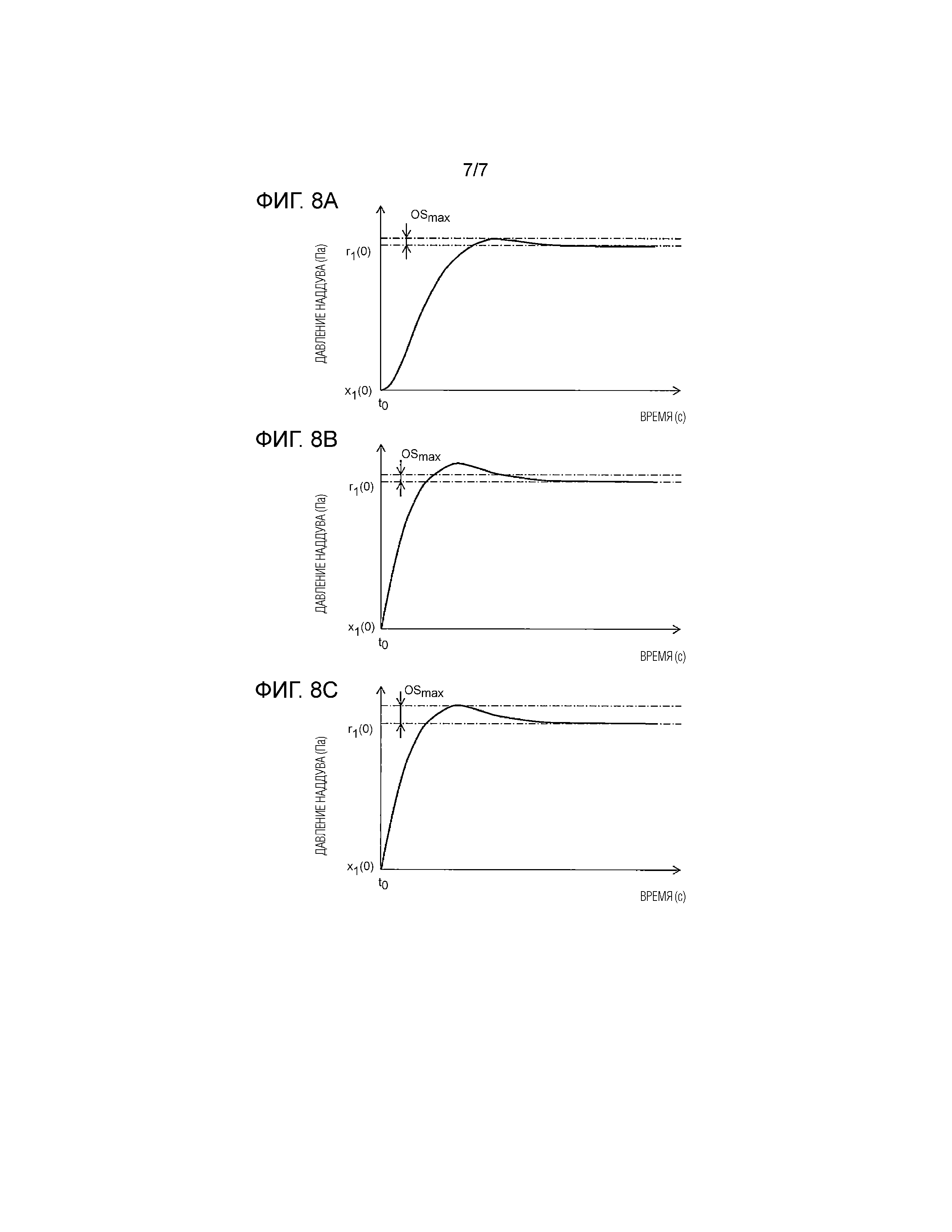
Фиг. 8A является временной диаграммой, показывающей переход давления наддува, когда темп изменения давления наддува в данное время равен нулю;
Фиг. 8B является временной диаграммой, показывающей один пример перехода давления наддува, когда темп изменения давления наддува в данное время составляет предписанную скорость; и
Фиг. 8C является временной диаграммой, показывающей один пример перехода давления наддува, когда темп изменения давления наддува в данное время составляет предписанную скорость.
Подробное описание вариантов осуществления изобретения
Далее подробно описываются примерные варианты осуществления настоящего изобретения со ссылкой на чертежи. В нижеприведенном описании, аналогичные составляющие элементы обозначаются посредством аналогичных ссылок с номерами.
Во-первых, описывается конфигурация двигателя 1 внутреннего сгорания, который использует устройство управления согласно первому варианту осуществления, со ссылкой на фиг. 1. Фиг. 1 является принципиальной блок-схемой двигателя 1 внутреннего сгорания. Двигатель внутреннего сгорания настоящего варианта осуществления представляет собой двигатель внутреннего сгорания на основе самовоспламенения от сжатия, который использует легкое масло в качестве топлива. Как показано на фиг. 1, двигатель 1 внутреннего сгорания включает в себя корпус 10 двигателя, устройство 20 подачи топлива, систему 30 впуска, систему 40 выпуска выхлопных газов, систему 50 рециркуляции выхлопных газов (EGR) и устройство 60 управления.
Корпус 10 двигателя включает в себя блок цилиндров, головку блока цилиндров и картер двигателя. В блоке цилиндров, формируются множество цилиндров 11. В головке блока цилиндров, формируются впускные порты и выхлопные порты. В каждом из цилиндров 11, располагается поршень. Цилиндры 11 сообщаются с впускными портами и выхлопными портами, соответственно.
Устройство 20 подачи топлива включает в себя клапаны 21 впрыска топлива, общую топливную магистраль 22, трубу 23 подачи топлива, топливный насос 24 и топливный бак 25. Клапаны 21 впрыска топлива располагаются в головке блока цилиндров таким образом, чтобы непосредственно впрыскивать топливо в камеры сгорания цилиндров 11, соответственно. Клапаны 21 впрыска топлива соединяются с топливным баком 25 через общую топливную магистраль 22 и трубу 23 подачи топлива. В трубе 23 подачи топлива, располагается топливный насос 24 для того, чтобы накачивать топливо в топливном баке 25. Топливо, накачанное посредством топливного насоса 24, подается в общую топливную магистраль 22 через трубу 23 подачи топлива и непосредственно впрыскивается в камеры сгорания цилиндров 11 из клапанов 21 впрыска топлива. Давление топлива в общей топливной магистрали 22 регулируется посредством изменения вывода топливного насоса 24. Следовательно, топливный насос 24 функционирует в качестве устройства управления давлением топлива, которое управляет давлением топлива, подаваемого в клапаны 21 впрыска топлива. Клапаны 21 впрыска топлива могут быть выполнены с возможностью впрыскивать топливо во впускные порты.
Система 30 впуска включает в себя впускной коллектор 31, впускную трубу 32, воздушный фильтр 33, компрессор 34 приводимого в действие выхлопными газами турбонагнетателя 5, промежуточный охладитель 35 и дроссельный клапан 36. Впускные порты цилиндров 11 сообщаются с воздушным фильтром 33 через впускной коллектор 31 и впускную трубу 32. Во впускной трубе 32, предоставляется компрессор 34 приводимого в действие выхлопными газами турбонагнетателя 5 для того, чтобы сжимать и выталкивать всасываемый воздух, который циркулирует через впускную трубу 32, и предоставляется промежуточный охладитель 35 для того, чтобы охлаждать воздух, сжимаемый посредством компрессора 34. Дроссельный клапан 36 может изменять площадь отверстия впускного канала, когда дроссельный клапан 36 вращается посредством актуатора 37 приведения в действие дроссельного клапана.
Система 40 выпуска выхлопных газов включает в себя выпускной коллектор 41, выхлопную трубу 42, турбину 43 приводимого в действие выхлопными газами турбонагнетателя 5 и сажевый фильтр 44 (в дальнейшем называемый просто "фильтром"). Выхлопные порты цилиндров 11 сообщаются с фильтром 44 через выпускной коллектор 41 и выхлопную трубу 42. Выхлопная труба 42 оснащена турбиной 43 приводимого в действие выхлопными газами турбонагнетателя 5, которая вращательно приводится в действие посредством энергии выхлопных газов. Когда турбина 43 приводимого в действие выхлопными газами турбонагнетателя 5 вращательно приводится в действие, компрессор 34 вращается согласованно, и за счет этого сжимается всасываемый воздух. В настоящем варианте осуществления, турбина 43 приводимого в действие выхлопными газами турбонагнетателя 5 оснащена регулируемым соплом. Когда степень открытия регулируемого сопла изменяется, скорость потока выхлопных газов, подаваемых в лопасть турбины, изменяется, что изменяет частоту вращения турбины 43. Соответственно, когда степень открытия регулируемого сопла изменяется, давление наддува изменяется.
Фильтр 44 улавливает мелкие частицы в выхлопных газах. При условии, что система 40 выпуска выхлопных газов представляет собой устройство для очистки и выпуска выхлопных газов в наружный воздух, система 40 выпуска выхлопных газов может включать в себя другое устройство управления выхлопными газами вместо или в дополнение к фильтру 44. Такой устройство управления выхлопными газами включает в себя, например, трехкомпонентный катализатор, катализатор избирательного каталитического восстановления NOx, который восстанавливает NOx в выхлопных газах, катализатор восстановления на основе накопления NOx и окислительный катализатор.
EGR-система 50 подает часть выхлопных газов, выпускаемых из корпуса 10 двигателя, во впускной канал. EGR-система 50 включает в себя EGR-трубу 51, регулирующий EGR-клапан 52 и EGR-охладитель 53. EGR-труба 51 соединяется с выпускным коллектором 41 и впускным коллектором 31, чтобы устанавливать сообщение между ними. EGR-труба 51 оснащена EGR-охладителем 53, который охлаждает EGR-газ, который протекает через EGR-трубу 51. Помимо этого, EGR-труба 51 оснащена регулирующим EGR-клапаном 52, который может изменять площадь отверстия EGR-канала, сформированного посредством EGR-трубы 51. Посредством управления степенью открытия регулирующего EGR-клапана 52, регулируется расход EGR-газа, который рециркулирует из выпускного коллектора 41 во впускной коллектор 31. Как результат, EGR-пропорция изменяется. EGR-пропорция представляет собой соотношение количества EGR-газа к общему количеству газа (сумме количества нового воздуха и количества EGR-газа), которое подается в камеру сгорания.
В настоящем варианте осуществления, приводимый в действие выхлопными газами турбонагнетатель 5 используется в качестве нагнетателя, который повышает давление впускного газа. Тем не менее, другие нагнетатели, такие как электрический компрессор и механический нагнетатель, могут использоваться при условии, что они могут повышать давление впускного газа.
Устройство 60 управления двигателя внутреннего сгорания включает в себя электронный модуль 61 управления (ECU) и различные датчики. ECU 61 сконфигурирован из цифрового компьютера, включающего в себя оперативное запоминающее устройство 63 (RAM), постоянное запоминающее устройство 64 (ROM), микропроцессор (CPU) 65, порт 66 ввода и порт 67 вывода, которые взаимно соединяются через двунаправленную шину 62.
Впускная труба 32 оснащена расходомером 71 воздуха, предоставленным на стороне впуска в направлении потока на входе компрессора 34 приводимого в действие выхлопными газами турбонагнетателя 5, чтобы определять расход воздуха, протекающего через впускную трубу 32. Дроссельный клапан 36 оснащен датчиком 72 открытия дросселя для определения степени открытия дроссельного клапана 36 (открытия дросселя). Во впускном коллекторе 31, предоставляется датчик 73 давления (в дальнейшем называемый "датчиком давления наддува") для того, чтобы определять давление (давление наддува) впускного газа во впускном коллекторе 31. Общая топливная магистраль 22 оснащена датчиком 74 давления (в дальнейшем называемым "датчиком давления топлива"), который определяет давление топлива в общей топливной магистрали 22, т.е. давление топлива, подаваемого в клапаны 21 впрыска топлива. Помимо этого, в выпускном коллекторе 41, предоставляется датчик 75 давления (в дальнейшем называемый "датчиком давления выхлопа") для того, чтобы определять давление (давление выхлопа) выхлопных газов в выпускном коллекторе 41. Помимо этого, фильтр 44 оснащен температурным датчиком 76, который определяет температуру фильтра 44. Вывод расходомера 71 воздуха, датчика 72 открытия дросселя, датчика 73 давления наддува, датчика 74 давления топлива, датчика 75 давления выхлопа и температурного датчика 76 вводится в порт 66 ввода через соответствующие аналого-цифровые преобразователи 68.
Педаль 77 акселератора соединяется с датчиком 78 нагрузки, который формирует выходное напряжение, которое является пропорциональным величине нажатия педали 77 акселератора. Выходное напряжение датчика 78 нагрузки вводится в порт 66 ввода через соответствующий аналого-цифровой преобразователь 68. Следовательно, в настоящем варианте осуществления, величина нажатия педали 77 акселератора используется в качестве нагрузки на двигатель. Датчик 79 угла поворота коленчатого вала формирует выходной импульс каждый раз, когда коленчатый вал корпуса 10 двигателя вращается, например, на 10 градусов. Сформированный выходной импульс вводится в порт 66 ввода. CPU 65 вычисляет частоту вращения двигателя из выходного импульса датчика 79 угла поворота коленчатого вала.
Порт 67 вывода ECU 61 соединяется с актуаторами, которые управляют работой двигателя 1 внутреннего сгорания, через соответствующие схемы 69 приведения в действие. В примере, показанном на фиг. 1, порт 67 вывода соединяется с регулируемым соплом приводимого в действие выхлопными газами турбонагнетателя 5, клапанов 21 впрыска топлива, топливного насоса 24, актуатора 37 приведения в действие дроссельного клапана и регулирующего EGR-клапана 52. ECU 61 выводит управляющие сигналы, которые управляют актуаторами этих компонентов, из порта 67 вывода с тем, чтобы управлять работой двигателя 1 внутреннего сгорания.
Далее приводится описание управления двигателем внутреннего сгорания, выполняемого в ECU 61 устройства 60 управления, со ссылкой на фиг. 2. Как показано на фиг. 2, ECU 61 включает в себя карту 85 целевых значений, эталонный регулятор 84 (RG), модуль 81 сравнения и контроллер 82 с обратной связью. Участок, обведенный пунктирной линией на фиг. 2, функционирует в качестве системы 80 с замкнутым контуром, которая выполняет управление с обратной связью таким образом, что управляющий вывод x двигателя 1 внутреннего сгорания приближается к целевому значению wf.
Когда система 80 с замкнутым контуром уже спроектирована, управляющая структура с прямой связью по фиг. 3 может получаться посредством выполнения эквивалентной деформации управляющей структуры по фиг. 2. Следует отметить, что y на фиг. 2 и 3 представляет собой величину состояния двигателя 1 внутреннего сгорания, причем величина состояния ограничивается таким образом, что она принимает ограниченные значения.
Модуль 81 сравнения вычисляет отклонение e (=wf-x) посредством вычитания управляющего вывода x из целевого значения wf и вводит отклонение e в контроллер 82 с обратной связью. Целевое значение wf вводится в модуль 81 сравнения из нижеописанного эталонного регулятора 84, и управляющий вывод x представляет собой вывод из двигателя 1 внутреннего сгорания. Экзогенный ввод d представляет собой данный параметр двигателя 1 внутреннего сгорания.
Контроллер 82 с обратной связью определяет управляющий ввод u двигателя 1 внутреннего сгорания таким образом, что управляющий вывод x приближается к целевому значению wf. Таким образом, контроллер 82 с обратной связью определяет управляющий ввод u таким образом, что отклонение e приближается к нулю. Контроллер 82 с обратной связью использует общеизвестное управление с обратной связью, к примеру, PI-управление и PID-управление. Контроллер 82 с обратной связью вводит управляющий ввод u в двигатель 1 внутреннего сгорания. Контроллер 82 с обратной связью также принимает ввод управляющего вывода x в качестве обратной связи по состоянию. Ввод управляющего вывода x в контроллер 82 с обратной связью может опускаться. Модуль 81 сравнения может быть включен в контроллер 82 с обратной связью.
Как описано выше, в системе 80 с замкнутым контуром, управление с обратной связью выполняется таким образом, что управляющий вывод x приближается к целевому значению wf. Тем не менее, при фактическом управлении, величина y состояния имеет ограничение, приписываемое ограничениям, связанным с аппаратными средствами или управлением. Соответственно, когда целевое значение, вычисленное без учета ограничения, вводится в систему 80 с замкнутым контуром, величина y состояния может конфликтовать с ограничением, что может приводить к ухудшенной переходной характеристике или нестабильному управлению.
Следовательно, в настоящем варианте осуществления, целевое значение wf управляющего вывода вычисляется с использованием карты 85 целевых значений и эталонного регулятора 84. Когда экзогенный ввод d вводится в карту 85 целевых значений, карта 85 целевых значений вычисляет временное целевое значение r на основе экзогенного ввода d и выводит временное целевое значение r в эталонный регулятор 84. Следовательно, карта 85 целевых значений функционирует в качестве модуля вычисления временных целевых значений, который вычисляет временное целевое значение r управляющего вывода на основе данного рабочего параметра двигателя 1 внутреннего сгорания.
Эталонный регулятор 84 вычисляет целевое значение wf посредством коррекции временного целевого значения r таким образом, чтобы увеличивать степень удовлетворения ограничивающего условия относительно величины y состояния. В частности, эталонный регулятор 84 вычисляет целевое значение wf таким образом, чтобы снижать значение целевой функции, заданное с учетом степени удовлетворения ограничивающего условия относительно величины y состояния, и, в частности, значение целевой функции, заданное таким образом, что оно является меньшим по мере того, как степень удовлетворения становится более высокой.
В настоящем варианте осуществления, управляющий вывод x представляет собой давление наддува. Давление наддува, вводимое в модуль 81 сравнения в качестве управляющего вывода x, определяется посредством датчика 73 давления наддува.
Управляющий ввод u для управления давлением наддува включает в себя степень открытия дроссельного клапана 36, степень открытия регулирующего EGR-клапана 52 и степень открытия регулируемого сопла приводимого в действие выхлопными газами турбонагнетателя 5. Экзогенный ввод d включает в себя частоту вращения двигателя и объем впрыска топлива, которые представляют собой рабочие параметры двигателя 1 внутреннего сгорания. Частота вращения двигателя определяется посредством датчика 79 угла поворота коленчатого вала. Объем впрыска топлива определяется посредством ECU 61 на основе нагрузки на двигатель и т.п., определенной посредством датчика 78 нагрузки. Как показано на фиг. 4, временное целевое значение r выражается как функция из частоты NE вращения двигателя и объема Qe впрыска топлива на карте 85 целевых значений.
Давление наддува имеет верхний предел в качестве ограничивающего условия, поскольку, при становлении слишком высоким, давление наддува может вызывать повреждение во впускной трубе и т.п. Соответственно, в настоящем варианте осуществления, величина y состояния представляет собой давление наддува, которое представляет собой управляющий вывод x. Таким образом, в настоящем варианте осуществления, величина y состояния представляет собой параметр, идентичный управляющему выводу x. Соответственно, величина y состояния (давление наддува) всегда описывается как управляющий вывод x. Следовательно, в настоящем варианте осуществления, можно сказать, что эталонный регулятор 84 вычисляет целевое значение wf посредством коррекции временного целевого значения r управляющего вывода таким образом, чтобы увеличивать степень удовлетворения ограничивающего условия относительно управляющего вывода x.
В этом случае, целевая функция J(w) задается посредством выражения (9) следующим образом:
J(w)=||r-w||2+Spim... (9)
Здесь, r является временным целевым значением, выводимым из карты 85 целевых значений, и w является предварительным целевым значением. Целевая функция J1(w) включает в себя корректировочный член (правосторонний первый член выражения (9)) и первую штрафную функцию Spim.
Корректировочный член выражает величину коррекции целевого значения, которая является квадратом разности между временным целевым значением r и предварительным целевым значением w. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как разность между временным целевым значением r, и предварительным целевым значением w меньше, т.е. величина коррекции целевого значения меньше.
Первая штрафная функция Spim представляет степень удовлетворения ограничивающего условия относительно давления наддува. Первая штрафная функция Spim задается посредством выражения (10) следующим образом:

Здесь, x1(k) является будущим прогнозным значением давления наддува, и p1 является предварительно определенным весовым коэффициентом. Помимо этого, x1Lim является верхним пределом предварительно определенного давления наддува, который представляет ограничивающее условие относительно давления наддува. Кроме того, k является дискретным временным шагом, и Nh является числом шагов прогнозирования (горизонтом прогнозирования). Первая штрафная функция Spim имеет такую конфигурацию, в которой когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, избыточная величина прибавляется в целевую функцию J(w) в качестве штрафа. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как сумма избыточных величин, полученных, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, меньше.
Как описано выше, эталонный регулятор 84 вычисляет целевое значение wf таким образом, чтобы снижать значение целевой функции, которое задается меньшей по мере того, как степень удовлетворения ограничивающего условия относительно величины y состояния (равной управляющему выводу x в настоящем варианте осуществления) становится более высокой. В дальнейшем в этом документе, со ссылкой на фиг. 5, описывается процесс вычисления целевых значений в эталонном регуляторе 84. Фиг. 5 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для процесса вычисления целевых значений в настоящем варианте осуществления. ECU 61 выполняет управляющую процедуру с указанными временными интервалами.
Во-первых, на этапе S11, ECU 61 получает временное целевое значение r управляющего вывода (давления наддува в настоящем варианте осуществления), вычисленного на основе экзогенного ввода d, с помощью карты 85 целевых значений. Затем, на этапе S12, ECU 61 задает временное целевое значение r управляющего вывода, полученное на этапе S11, в качестве начального значения предварительного целевого значения w.
Затем, на этапе S13, чтобы находить оптимальное значение предварительного целевого значения w посредством градиентного метода, ECU 61 вычисляет, с помощью выражения (9), значения целевых функций J(wa)-J(wd) в четырех соседних целевых значениях wa-wd, которые отделены на предписанные расстояния от текущего предварительного целевого значения w. В это время, каждый член целевой функции J(w) в выражении (9) вычисляется посредством использования соседних целевых значений wa-wd в качестве предварительного целевого значения w.
Затем, на этапе S14, ECU 61 перемещает предварительное целевое значение w в направлении градиента, вычисленного из значений целевых функций J(wa)-J(wd). Таким образом, предварительное целевое значение w обновляется. В частности, ECU 61 задает предварительное целевое значение w равным соседнему целевому значению, из числа соседних целевых значений wa-wd, которое предоставляет наименьшую целевую функцию J(w). Затем, на этапе S15, ECU 61 постепенно увеличивает количество обновлений на единицу. Количество обновлений указывает число раз, когда предварительное целевое значение w обновляется. Начальное значение количества обновлений равно нулю.
Затем, на этапе S16, ECU 61 определяет то, составляет или нет количество обновлений предписанное число раз в N или более. Предписанное число N раз, например, составляет 5-200. Когда ECU 61 на этапе S16 определяет то, что количество обновлений меньше предписанного числа N раз, настоящая управляющая процедура возвращается к этапу S12. Следовательно, оптимальное значение предварительного целевого значения w многократно находится до тех пор, пока количество обновлений не достигнет предписанного числа N раз.
Когда ECU 61 на этапе S16 определяет то, что количество обновлений равно или больше предписанного числа N раз, настоящая управляющая процедура переходит к этапу S17. На этапе S17, ECU 61 задает целевое значение wf управляющего вывода равным конечному предварительному целевому значению w. На этапе S17, ECU 61 также сбрасывает количество обновлений до нуля. После этапа S17, ECU 61 завершает настоящую управляющую процедуру.
Предварительное целевое значение w может обновляться посредством способов, отличных от градиентного метода, при условии, что предварительное целевое значение w может обновляться таким образом, что значение целевой функции становится меньшим.
Теперь, при вычислении первой штрафной функции Spim, необходимо вычислять будущее прогнозное значение x1(k) давления наддува вплоть до предписанного периода прогнозирования от текущего времени (горизонта прогнозирования). В качестве способа вычисления будущего прогнозного значения x1(k) давления наддува, может рассматриваться способ вычисления с использованием следующего выражения (11).
x1(k+1)=f1(x1(k), w, d)... (11)
В выражении (11), f1 является модельной функцией, используемой для того, чтобы вычислять будущее прогнозное значение x1(k) давления наддува. Во-первых, с использованием x1(0), которое представляет собой давление наддува во время вычисления, вычисляется прогнозированное значение x1(1) давления наддува, которое составляет на один шаг до времени вычисления. Давление x1(0) наддува во время вычисления определяется посредством датчика 73 давления наддува. Затем будущее прогнозное значение x1(k) давления наддува последовательно вычисляется вплоть до прогнозного значения x1(Nh) давления наддува, которое составляет на Nh шагов до времени вычисления. Как результат, вычисляются все Nh будущих прогнозных значений давления наддува. Период прогнозирования является значением, полученным посредством умножения времени, соответствующего одному шагу, на число Nh шагов прогнозирования.
Тем не менее, в случае вычисления будущего прогнозного значения x1(k) давления наддува посредством способа с использованием выражения (11), необходимо непрерывно выполнять вычисление с использованием выражения (11) для числа раз, равного числу Nh шагов прогнозирования. Помимо этого, эталонный регулятор 84 многократно выполняет вычисление целевой функции J(w) посредством выражения (9), чтобы вычислять конечное целевое значение wf посредством коррекции предварительного целевого значения w, как описано выше. Следовательно, когда будущее прогнозное значение x1(k) давления наддува вычисляется посредством способа с использованием выражения (11), очень высокая арифметическая нагрузка налагается на ECU 61.
Между тем, в настоящем варианте осуществления, контроллер 82 с обратной связью выполняет управление с обратной связью давлением наддува. Когда управляющий вывод управляется таким способом посредством системы с замкнутым контуром, к примеру, управление с обратной связью, характеристика отклика управляющего вывода зачастую может аппроксимироваться линейным откликом. Следовательно, характеристика отклика давления наддува также может аппроксимироваться в качестве линейного отклика, и, в частности, характеристика отклика может аппроксимироваться при условии, что возникает вторичная задержка.
Как показано в выражении (10), при вычислении первой штрафной функции Spim, используется сумма избыточных величин, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim. Когда характеристика отклика давления наддува аппроксимируется в качестве линейного отклика, сумма избыточных величин, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, может приблизительно вычисляться на основе максимального значения избыточной величины, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim. Максимальное значение избыточной величины, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, может вычисляться на основе максимального значения величины перерегулирования, как вкратце описано ниже со ссылкой на фиг. 6.
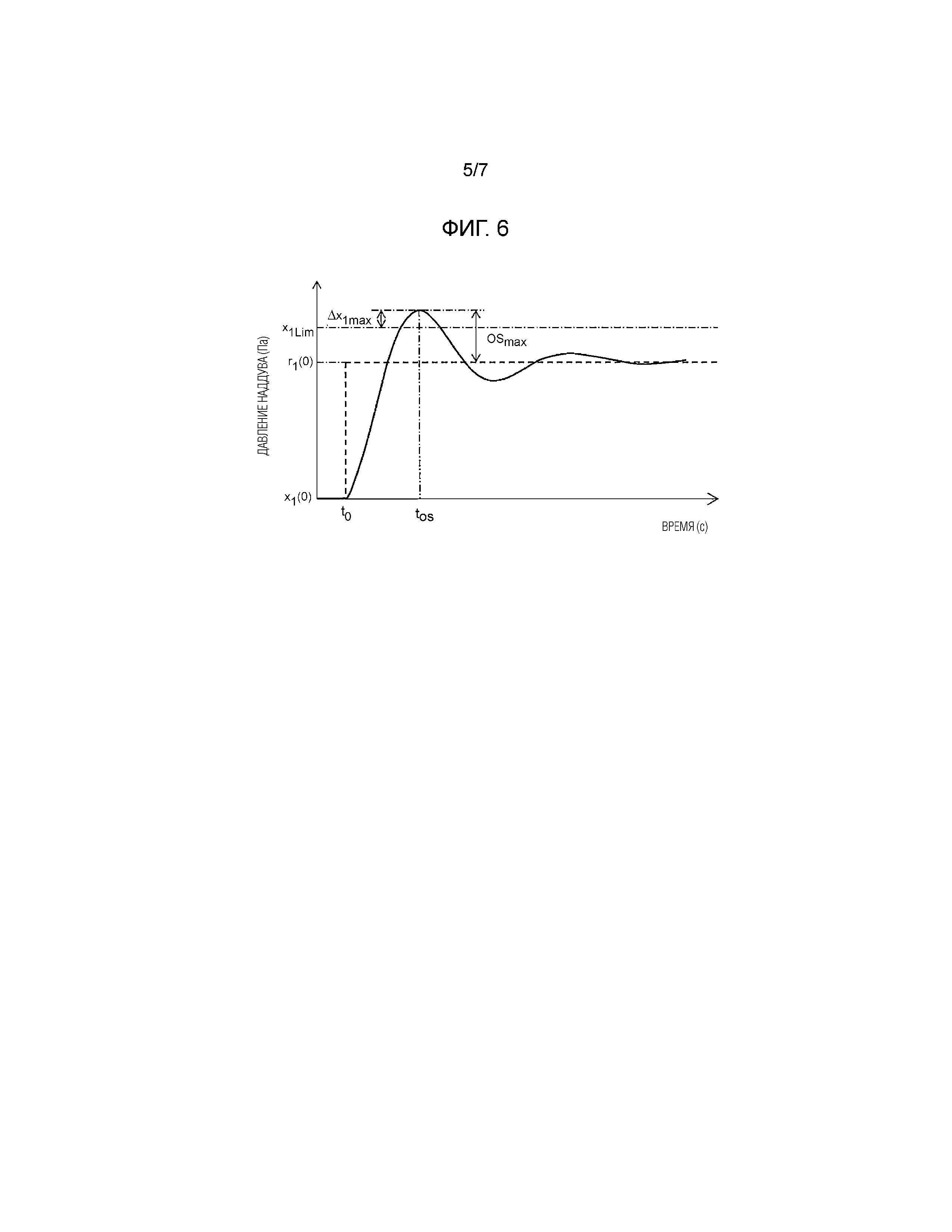
Фиг. 6 является временной диаграммой, показывающей фактическое давление наддува, которое изменяется с изменением целевого значения давления наддува. Пунктирная линия на фиг. 6 указывает переход целевого значения давления наддува, и сплошная линия указывает переход фактического давления наддува (либо его прогнозированного значения).
Как показано на фиг. 6, когда целевое значение давления наддува изменяется ступенчато до r1(0) во время t0 в состоянии, в котором фактическое давление наддува поддерживается равным x1(0), фактическое давление наддува переходит, например, как показано посредством сплошной линии по фиг. 6. В примере, показанном на фиг. 6, в частности, фактическое давление наддува изменяется за рамками целевого значения таким образом, что фактическое давление наддува перерегулируется. Избыточная величина фактического давления наддува, которая превышает целевое значение в этом случае, упоминается как величина перерегулирования в дальнейшем.
В примере, показанном на фиг. 6, величина перерегулирования становится максимумом во время tos. В дальнейшем в этом документе, время, когда величина перерегулирования становится максимумом, упоминается как максимальное время tos, и величина перерегулирования в это время упоминается как максимальное значение OSmax величины перерегулирования.
В результате становления величины перерегулирования максимумом во время tos, фактическое давление наддува также становится максимумом во время tos. Соответственно, избыточная величина будущего прогнозного значения x1(k) давления наддува, которая превышает верхний предел x1Lim, также становится максимумом в это время.
Как описано выше, при вычислении первой штрафной функции Spim, используется максимальное значение избыточной величины, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim. Следовательно, чтобы вычислять первую штрафную функцию Spim, необязательно вычислять будущее прогнозное значение давления наддува за предписанный период прогнозирования, если максимальное значение избыточной величины (или максимальное значение OSmax величины перерегулирования), когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, может вычисляться так, как описано выше. Соответственно, в настоящем варианте осуществления, первая штрафная функция Spim вычисляется без вычисления будущего прогнозного значения давления наддува за предписанный период прогнозирования, как описано ниже.
Во-первых, как описано выше, характеристика отклика давления наддува может аппроксимироваться при условии, что возникает вторичная задержка. Следовательно, когда давление наддува просто выражается как x, характеристика отклика давления наддува может выражаться посредством дифференциального уравнения, указываемого посредством следующего выражения (12), которое выражает модель прогнозирования системы со вторичной задержкой.
x''+2ζwnx'+wn2x =Kwn2w... (12)
В выражении (12), x'' представляет дифференциальное значение второго порядка давления наддува, которое представляет собой управляющий вывод, и x' представляет его дифференциальное значение первого порядка. Кроме того, ζ представляет коэффициент демпфирования, wn представляет собственную угловую частоту, и K представляет усиление. Коэффициент ζ демпфирования, собственная угловая частота wn и усиление K задаются, например, на основе усиления системы управления и т.п. для управления с обратной связью, выполняемого в контроллере 82 с обратной связью. Следовательно, коэффициент ζ демпфирования, собственная угловая частота wn и усиление K изменяются, например, с изменением усиления системы управления для управления с обратной связью в ходе работы двигателя 1 внутреннего сгорания.
Не требуется изменять все из коэффициента ζ демпфирования, собственной угловой частоты wn и усиления K в соответствии с усилением системы управления и т.п. для управления с обратной связью. Тем не менее, в этом случае, по меньшей мере, значение одного из параметров, используемых в модели прогнозирования, по-прежнему предпочтительно задается на основе усиления системы управления и т.п. для управления с обратной связью, выполняемого в контроллере 82 с обратной связью.
Здесь, когда начальное значение x1(0) давления наддува задается равным x0=0, начальный темп x1'(0) изменения давления наддува задается равным x'0, и преобразование Лапласа выражения (12) выполняется, извлекается следующее выражение (13):
(s2x-sx0-x'0)+2ζwn(sx-x0)+ωn2x=Kwn2w... (13)
Когда x0=0 подставляется, чтобы компоновать выражение (13), выражение (13) может деформироваться в следующее выражение (14):
(s2+2ζwns+wn2)x=Kwn2w+x'0... (14)
Чтобы вычислять ступенчатый отклик, w=1/с подставляется, чтобы компоновать выражение (14). Как результат, выражение (14) может выражаться как нижеприведенное выражение (15):

Когда wd задается как следующее выражение (16), и выражение (15) разлагается на элементарные дроби, то A, B, C выражаются как следующие выражения (18), (19), (20), соответственно:
Выражения (18), (19) подставляются в выражение (17) и подвергаются обратному преобразованию Лапласа. Как результат, получается следующее выражение (21):

Следовательно, переход давления наддува во время пошагового изменения целевого значения давления наддува может выражаться посредством вышеприведенного выражения (21). В выражении (21), t представляет истекшее время от времени, когда целевое значение давления наддува изменяется ступенчато.
Здесь, когда величина перерегулирования становится максимумом, темп изменения давления наддува равен нулю. Следовательно, когда величина перерегулирования становится максимумом, дифференциальное значение x'(t) в выражении (21) становится нулевым. Следовательно, ниже вычисляется время, когда дифференциальное значение x'(t) в выражении (21) становится нулевым.
Во-первых, когда выражение (21) дифференцируется, получается следующее выражение (22). Следует отметить, что D, E в выражении (22) выражаются посредством следующих выражений (23), (24), соответственно:
Здесь, когда ϕ задается как следующее выражение (25), выражение (22) может деформироваться в следующее выражение (26):

В выражении (26), первое время, когда x'(t)=0 устанавливается, получается посредством решения ϕ+ωd=π, как показано в следующем выражении (27):

Время tos, полученное в выражении (27), представляет время, когда величина перерегулирования, описанная выше, становится максимумом, т.е. время, когда избыточная величина давления наддува, которая превышает верхний предел, становится максимумом.
Когда время tos, полученное посредством выражения (27), подставляется в выражение (21), и усиление K задается равным 1 (разность между текущим значением и целевым значением давления наддува предположительно равна 1), получается следующее выражение (28):
В выражении (28) μ выражается посредством следующего выражения (29):

Как описано выше, μ, полученное в выражении (29), представляет прогнозированное максимальное значение величины перерегулирования, когда разность между текущим значением и целевым значением давления наддува предположительно равна 1. Следовательно, прогнозированное максимальное значение величины перерегулирования, когда текущее давление наддува задается равным x(t), и целевое значение задается равным r(t), выражается посредством следующего выражения (30). Помимо этого, давление x1max наддува, когда величина перерегулирования становится максимумом, выражается посредством следующего выражения (31):
OSmax=μ(r1(t)-x1(t))... (30)
x1max=r1(t)+OSmax... (31)
Когда используется такое вычисленное давление x1max наддува, когда величина перерегулирования становится максимумом, первая штрафная функция Spim может вычисляться с помощью следующего выражения (32). В выражении (32), Δx1max представляет разность между давлением наддува, когда величина перерегулирования становится максимумом, и верхним пределом, т.е. максимальной избыточной величиной будущего прогнозного значения x1 давления наддува, которая превышает верхний предел x1Lim. В выражении (32), α является коэффициентом для преобразования максимального значения избыточной величины, когда будущее прогнозное значение x1(k) давления наддува превышает верхний предел x1Lim, в сумму избыточных величин будущего прогнозного значения x1(k) давления наддува, которая превышает верхний предел x1Lim.
Spim=αp1(x1max-x1Lim)=αp1Δx1max... (32)
Таким образом, в настоящем варианте осуществления, целевая функция вычисляется на основе разности между давлением наддува, когда величина перерегулирования становится максимумом, и верхним пределом, т.е. максимальной избыточной величиной будущего прогнозного значения x1 давления наддува, которая превышает верхний предел x1Lim. В настоящем варианте осуществления, в частности, значение целевой функции вычисляется таким образом, что по мере того, как будущее прогнозное значение x1 давления наддува становится большим за рамками верхнего предела x1Lim, степень удовлетворения ограничивающего условия становится более низкой, и в силу этого значение целевой функции становится большим. Другими словами, по мере того, как оцененное максимальное значение величины перерегулирования становится большим за рамками верхнего предела (x1Lim-r1(0)), соответствующего верхнему пределу x1Lim давления наддува, степень удовлетворения ограничивающего условия становится более низкой, и в силу этого значение целевой функции вычисляется как большее.
В настоящем варианте осуществления, целевая функция вычисляется так, как описано выше. В дальнейшем в этом документе, со ссылкой на фиг. 7, описывается процесс вычисления значений целевой функции в эталонном регуляторе 84. Фиг. 7 является блок-схемой последовательности операций способа, показывающей управляющую процедуру для процесса вычисления значений целевой функции в настоящем варианте осуществления. Проиллюстрированная управляющая процедура выполняется на этапе S13 по фиг. 5.
Во-первых, на этапе S21, получается текущее значение x1(0) давления наддува. Текущее значение x1(0) давления наддува получается из вывода датчика 73 давления наддува. Затем, на этапе S22, вычисляется текущий темп x1'(0) изменения давления наддува. ECU 61 вычисляет текущий темп x1'(0) изменения давления наддува на основе текущего значения x1(0) давления наддува и предыдущего значения давления наддува. Затем, на этапе S23, получается целевое значение w1 давления наддува. Целевое значение w1 давления наддува является значением, вычисленным или полученным на этапе S12 или S14 по фиг. 5.
Затем, на этапах S24, S25, значение целевой функции вычисляется с помощью модели прогнозирования. Здесь, первая штрафная функция Spim вычисляется посредством выражения (32), на основе текущего значения x1(0) давления наддува, полученного на этапе S21, текущего темпа x1'(0) изменения давления наддува, вычисленного на этапе S22, и целевого значения w1 давления наддува. Давление x1max наддува в выражении (32) вычисляется посредством выражения (31), и прогнозированное максимальное значение OSmax перерегулирования в выражении (31) вычисляется посредством выражения (30). Значение μ в выражении (30) вычисляется посредством выражения (29), и коэффициенты C, D, E и tos в выражении (29) вычисляются посредством выражения (20), (23), (24) и (27), соответственно. Значение ϕ в выражении (27) вычисляется посредством выражения (25).
Затем, на этапе S25, значение целевой функции вычисляется посредством подстановки Spim, вычисленного на этапе S24, в выражение (9), и управляющая процедура завершается.
Как описано выше, в настоящем варианте осуществления, первая штрафная функция Spim может вычисляться посредством одного сеанса вычисления, без многократного вычисления будущего прогнозного значения давления наддува за период прогнозирования. Следовательно, согласно настоящему варианту осуществления, может уменьшаться арифметическая нагрузка во время вычисления первой штрафной функции Spim, и вообще говоря, арифметическая нагрузка во время вычисления целевого значения давления наддува.
В варианте осуществления, при вычислении первой штрафной функции Spim, вычисляется прогнозированное максимальное значение OSmax величины перерегулирования. При вычислении прогнозированного максимального значения OSmax величины перерегулирования, используется текущий темп изменения давления наддува. Таким образом, точность прогнозирования прогнозированного максимального значения OSmax может повышаться посредством вычисления прогнозированного максимального значения OSmax с использованием текущего темпа изменения давления наддува.
Фиг. 8A, 8B и 8C являются временными диаграммами, показывающими переходы давления наддува в случае, если текущее значение давления наддува составляет x1(0), и целевое значение составляет r1(0). Фиг. 8A показывает переход давления наддува, когда темп изменения давления наддува во время t0 равен нулю. Фиг. 8B и фиг. 8C показывают переходы давления наддува, когда темп изменения давления наддува во время t0 составляет предписанную скорость, отличную от нуля. На фиг. 8A и 8B, прогнозированное максимальное значение OSmax величины перерегулирования является значением, вычисленным с использованием модели прогнозирования, в которой начальный темп изменения давления наддува (темп изменения давления наддува во время t0) равен нулю. Между тем, на фиг. 8C, прогнозированное максимальное значение OSmax величины перерегулирования является значением, вычисленным с использованием модели прогнозирования, в которой начальный темп изменения вводится в качестве начального темпа изменения давления наддува, аналогично настоящему варианту осуществления.
Даже в модели прогнозирования, в которой начальный темп изменения давления наддува равен нулю, прогнозированное максимальное значение OSmax, вычисленное посредством модели прогнозирования, практически совпадает с фактическим максимальным значением величины перерегулирования, как показано на фиг. 8A, когда темп изменения давления наддува во время t0 равен нулю. В модели прогнозирования, в которой начальный темп изменения давления наддува равен нулю, фактическое максимальное значение величины перерегулирования существенно отличается от прогнозированного максимального значения OSmax, вычисленного посредством модели прогнозирования, когда темп изменения давления наддува во время t0 составляет предписанную скорость, как показано на фиг. 8B. Следовательно, когда целевое значение давления наддува вычисляется с использованием прогнозированного максимального значения OSmax, вычисленного таким образом, могут вычисляться значения, которые не являются оптимальными.
Согласно настоящему варианту осуществления, при создании модели прогнозирования системы со вторичной задержкой, которая указывает характеристику отклика давления наддува, учитывается начальный темп изменения давления наддува. Как результат, как показано на фиг. 8C, даже в случае, если темп изменения давления наддува во время t0 составляет предписанную скорость, отличную от нуля, прогнозированное максимальное значение OSmax величины перерегулирования совпадает с фактическим максимальным значением величины перерегулирования. В двигателе 1 внутреннего сгорания, в частности, давление наддува изменяется часто, и в силу этого начальный темп изменения давления наддува зачастую является не нулевым. В настоящем варианте осуществления, даже когда давление наддува часто изменяется таким способом, прогнозированное максимальное значение OSmax величины перерегулирования может вычисляться относительно корректно. Как результат, оптимальное целевое значение может вычисляться посредством эталонного регулятора 84.
Теперь, в варианте осуществления, при вычислении целевой функции J(w), учитывается ограничивающее условие относительно давления наддува. Тем не менее, при вычислении целевой функции J(w), может учитываться ограничивающее условие относительно других величин состояния, таких как частота вращения турбины и давление выхлопа. В дальнейшем в этом документе, приводится описание случая, когда частота вращения турбины в дополнение к давлению наддува учитывается в качестве ограничивающего условия.
В этом случае, целевая функция выражается посредством выражения (33) следующим образом:
J(w)=||r-w||2+Spim+SNt... (33)
В выражении (33,) SNt является второй штрафной функцией, которая выражает степень удовлетворения ограничивающего условия относительно частоты вращения турбины. Вторая штрафная функция SNt задается посредством следующего выражения (34):

Здесь, y1(k) является будущим прогнозным значением частоты вращения турбины, y1Lim является предварительно определенным верхним пределом частоты вращения турбины, и p2 является предварительно определенным весовым коэффициентом. Вторая штрафная функция SNt имеет такую конфигурацию, в которой когда будущее прогнозное значение y1(k) частоты вращения турбины превышает верхний предел y1Lim, избыточная величина прибавляется в целевую функцию J(w) в качестве штрафа. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как сумма избыточных величин, полученных, когда будущее прогнозное значение y1(k) частоты вращения турбины превышает верхний предел y1Lim, меньше.
Эталонный регулятор 84 вычисляет будущее прогнозное значение y1(k) частоты вращения турбины с использованием модели прогнозирования двигателя 1 внутреннего сгорания. Например, эталонный регулятор 84 вычисляет будущее прогнозное значение y1(k) частоты вращения турбины с помощью следующего выражения (35):
y1(k+)=f2(y1(k), w, d)... (35)
Значение f2 является модельной функцией, используемой для того, чтобы вычислять будущее прогнозное значение y1(k) частоты вращения турбины. Во-первых, с использованием y1(0), которое представляет собой частоту вращения турбины во время вычисления, вычисляется прогнозированное значение y1(1) частоты вращения турбины, которое составляет на один шаг до времени вычисления. Частота y1(0) вращения турбины во время вычисления определяется, например, посредством датчика частоты вращения турбины (не проиллюстрирован), предоставленного в турбине 43. Затем будущее прогнозное значение y1(k) частоты вращения турбины последовательно вычисляется вплоть до прогнозного значения y1(Nh) частоты вращения турбины, которое составляет на Nh шагов до времени вычисления. Как результат, вычисляются все Nh будущих прогнозных значений частоты вращения турбины.
Даже когда ограничения налагаются на множество величин состояния, целевое значение давления наддува может задаваться таким образом, чтобы увеличивать полную степень удовлетворения ограничивающих условий относительно величин состояния посредством вычисления целевых функций, аналогично настоящей модификации. Хотя повторяющееся вычисление необходимо при вычислении значения второй штрафной функции, повторяющееся становится необязательным при вычислении значения первой штрафной функции, как описано выше. Это позволяет уменьшать арифметическую нагрузку во время вычисления целевого значения давления наддува.
Далее приводится описание устройства управления согласно второму варианту осуществления. Конфигурация и управление устройством управления согласно второму варианту осуществления по существу являются аналогичными конфигурации и управлению устройством управления согласно первому варианту осуществления. В дальнейшем в этом документе, главным образом приводится описание отличия от устройства управления согласно первому варианту осуществления.
Устройство управления согласно первому варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой давление наддува. В отличие от этого, устройство управления согласно второму варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой EGR-пропорцию. Управляющий ввод в этом случае включает в себя, например, степень открытия дроссельного клапана 36, степень открытия регулирующего EGR-клапана 52 и степень открытия регулируемого сопла приводимого в действие выхлопными газами турбонагнетателя 5.
Здесь, когда EGR-пропорция становится слишком высокой, кислорода становится недостаточно, что может вызывать нежелательные обстоятельства, такие как пропуск зажигания. Следовательно, EGR-пропорция имеет верхний предел в качестве ограничивающего условия. Соответственно, целевая функция J(w) в настоящем варианте осуществления задается посредством следующего выражения (36), и третья штрафная функция SEGR задается посредством следующего выражения (37):
Здесь, x2(k) является будущим прогнозным значением EGR-пропорции, x2Lim является предварительно определенным верхним пределом EGR-пропорции, и p3 является предварительно определенным весовым коэффициентом. Третья штрафная функция SEGR имеет такую конфигурацию, в которой когда будущее прогнозное значение x2(k) EGR-пропорции превышает верхний предел x2Lim, избыточная величина прибавляется в целевую функцию J(w) в качестве штрафа. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как сумма избыточных величин, полученных, когда будущее прогнозное значение x2(k) EGR-пропорции превышает верхний предел x2Lim, меньше.
Здесь, характеристика отклика EGR-пропорции также может аппроксимироваться в качестве линейного отклика, и, в частности, характеристика отклика может аппроксимироваться при условии, что возникает вторичная задержка. Когда характеристика отклика EGR-пропорции аппроксимируется в качестве линейного отклика, сумма избыточных величин, когда будущее прогнозное значение x2(k) EGR-пропорции превышает верхний предел x2Lim, может вычисляться на основе максимального значения избыточной величины, когда будущее прогнозное значение x2(k) EGR-пропорции превышает верхний предел x2Lim. Следовательно, третья штрафная функция SEGR также может вычисляться из максимального значения величины перерегулирования EGR-пропорции.
EGR-пропорция x2max, когда величина перерегулирования EGR-пропорции становится максимумом, вычисляется посредством следующего выражения (38), и μ в выражении (38) вычисляется посредством следующего выражения (39). Коэффициенты C, D, E и tos в выражении (39) вычисляются посредством выражения (16), (20), (23)-(25) и (27).

Как описано выше, когда вычисляется максимальное значение OSmax величины перерегулирования EGR-пропорции, может уменьшаться арифметическая нагрузка в то время, когда эталонный регулятор 84 вычисляет целевое значение EGR-пропорции. Даже когда двигатель 1 внутреннего сгорания работает в неустановившемся режиме, прогнозированное максимальное значение OSmax величины перерегулирования EGR-пропорции может вычисляться относительно корректно. Как результат, эталонный регулятор 84 может вычислять оптимальное целевое значение.
При фактическом вычислении целевой функции, текущая EGR-пропорция оценивается посредством общеизвестного способа, на основе степени открытия регулирующего EGR-клапана 52 и т.п. Текущий темп изменения EGR-пропорции вычисляется в ECU 61 на основе текущего значения EGR-пропорции и предыдущего оцененного значения EGR-пропорции.
Также в настоящем варианте осуществления, при вычислении целевой функции J(w), ограничивающее условие относительно величины состояния, отличной от EGR-пропорции, такой как частота вращения турбины и давление выхлопа, может учитываться, аналогично модификации первого варианта осуществления.
Далее приводится описание устройства управления согласно третьему варианту осуществления. Конфигурация и управление устройством управления согласно третьему варианту осуществления по существу являются аналогичными конфигурации и управлению устройством управления согласно первому варианту осуществления. В дальнейшем в этом документе, главным образом приводится описание отличия от устройства управления согласно первому варианту осуществления.
Устройство управления согласно первому варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой давление наддува. В отличие от этого, устройство управления согласно третьему варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой температуру фильтра 44. Управляющий ввод в этом случае включает в себя, например, временное распределение и объем впрыска топлива из клапанов 21 впрыска топлива, степень открытия регулирующего EGR-клапана 52 и степень открытия регулируемого сопла приводимого в действие выхлопными газами турбонагнетателя 5.
Здесь, когда температура фильтра 44 становится слишком высокой, это вызывает нежелательные обстоятельства, такие как эрозия фильтра. Соответственно, температура фильтра 44 имеет верхний предел в качестве ограничивающего условия. Соответственно, целевая функция J(w) в настоящем варианте осуществления задается посредством следующего выражения (40), и четвертая штрафная функция STF задается посредством следующего выражения (41):
Здесь, x3(k) является будущим прогнозным значением температуры фильтра 44, x3Lim является верхним пределом температуры фильтра 44, и p4 является предварительно определенным весовым коэффициентом. Четвертая штрафная функция STF имеет такую конфигурацию, в которой когда будущее прогнозное значение x3(k) температуры фильтра 44 превышает верхний предел x3Lim, избыточная величина прибавляется в целевую функцию J(w) в качестве штрафа. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как сумма избыточных величин, полученных, когда будущее прогнозное значение x3(k) температуры фильтра 44 превышает верхний предел x3Lim, меньше.
Здесь, характеристика отклика температуры фильтра 44 также может аппроксимироваться в качестве линейного отклика, и, в частности, характеристика отклика может аппроксимироваться при условии, что возникает вторичная задержка. Когда характеристика отклика температуры фильтра 44 аппроксимируется в качестве линейного отклика, сумма избыточных величин, когда будущее прогнозное значение x3(k) температуры фильтра 44 превышает верхний предел x3Lim, также может вычисляться на основе максимального значения избыточной величины, когда будущее прогнозное значение x3(k) температуры фильтра 44 превышает верхний предел x3Lim. Следовательно, четвертая штрафная функция STF также может вычисляться из максимального значения величины перерегулирования температуры фильтра 44.
Температура x3max фильтра 44, когда величина перерегулирования температуры фильтра 44 становится максимумом, вычисляется посредством последующего выражения (42), и μ в выражении (42) вычисляется посредством выражения (39), аналогично вышеописанному варианту осуществления.
x3max=r3(t)+OSmax=r3(t)+μ(r3(t)-x3(t))... (42)
Как описано выше, когда вычисляется максимальное значение OSmax величины перерегулирования температуры фильтра 44, может уменьшаться арифметическая нагрузка в то время, когда эталонный регулятор 84 вычисляет целевое значение температуры фильтра 44. Даже когда двигатель 1 внутреннего сгорания работает в неустановившемся режиме, прогнозированное максимальное значение OSmax величины перерегулирования температуры фильтра 44 может вычисляться относительно корректно. Как результат, эталонный регулятор 84 может вычислять оптимальное целевое значение.
При фактическом вычислении целевой функции, температура текущего фильтра 44 определяется, например, посредством температурного датчика 76, который определяет температуру фильтра 44. Текущий темп изменения температуры фильтра 44 вычисляется в ECU 61, на основе текущего значения температуры фильтра 44 и температуры фильтра 44, определенной ранее посредством температурного датчика 76.
Также в настоящем варианте осуществления, при вычислении целевой функции J(w), ограничивающее условие относительно величины состояния, отличной от EGR-пропорции, такой как частота вращения турбины и давление выхлопа, может учитываться, аналогично модификации первого варианта осуществления.
Далее приводится описание устройства управления согласно четвертому варианту осуществления. Конфигурация и управление устройством управления согласно четвертому варианту осуществления по существу являются аналогичными конфигурации и управлению устройством управления согласно первому варианту осуществления. В дальнейшем в этом документе, главным образом приводится описание отличия от устройства управления согласно первому варианту осуществления.
Устройство управления согласно первому варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой давление наддува. В отличие от этого, устройство управления согласно четвертому варианту осуществления представляет собой устройство управления в случае, если как управляющий вывод x, так и величина y состояния, имеющая ограничивающее условие, представляют собой давление топлива. Управляющий ввод в этом случае, например, представляет собой электрическую мощность, подаваемую в топливный насос 24.
Здесь, когда давление топлива становится слишком высоким, это вызывает нежелательные обстоятельства, такие как повреждение клапанов 21 впрыска топлива. Соответственно, давление топлива имеет верхний предел в качестве ограничивающего условия. Соответственно, целевая функция J(w) в настоящем варианте осуществления задается посредством следующего выражения (43), и пятая штрафная функция SPF задается посредством следующего выражения (44):
Здесь, x4(k) является будущим прогнозным значением давления топлива, x4Lim является предварительно определенным верхним пределом давления топлива, и p5 является предварительно определенным весовым коэффициентом. Пятая штрафная функция SPF имеет такую конфигурацию, в которой когда будущее прогнозное значение x4(k) давления топлива превышает верхний предел x4Lim, избыточная величина прибавляется в целевую функцию J(w) в качестве штрафа. Соответственно, значение целевой функции J(w) становится меньшим по мере того, как сумма избыточных величин, полученных, когда будущее прогнозное значение x4(k) давления топлива превышает верхний предел x4Lim, меньше.
Здесь, характеристика отклика давления топлива также может аппроксимироваться в качестве линейного отклика, и, в частности, характеристика отклика может аппроксимироваться при условии, что возникает вторичная задержка. Когда характеристика отклика давления топлива аппроксимируется в качестве линейного отклика, сумма избыточных величин, когда будущее прогнозное значение x4(k) давления топлива превышает верхний предел x4Lim, может вычисляться на основе максимального значения избыточной величины, когда будущее прогнозное значение x4(k) давления топлива превышает верхний предел x4Lim. Следовательно, пятая штрафная функция SPF также может вычисляться из максимального значения величины перерегулирования давления топлива.
Давление x4max топлива, когда величина перерегулирования давления топлива становится максимумом, вычисляется посредством следующего выражения (45), и μ в выражении (45) вычисляется посредством выражения (39), аналогично вышеописанному варианту осуществления.
x4max=r4(t)+OSmax=r4(t)+μ(r4(t)-x4(t))... (45)
Как описано выше, когда вычисляется максимальное значение OSmax величины перерегулирования давления топлива, может уменьшаться арифметическая нагрузка в то время, когда эталонный регулятор 84 вычисляет целевое значение давления топлива. Даже когда двигатель 1 внутреннего сгорания работает в неустановившемся режиме, прогнозированное максимальное значение OSmax величины перерегулирования давления топлива может вычисляться относительно корректно. Как результат, эталонный регулятор 84 может вычислять оптимальное целевое значение.
При фактическом вычислении целевой функции, текущее давление топлива определяется, например, посредством датчика 74 давления топлива, который определяет давление топлива в общей топливной магистрали 22. Текущий темп изменения давления топлива вычисляется в ECU 61, на основе текущего значения давления топлива и давления топлива, определенного ранее посредством датчика 74 давления топлива.
Также в настоящем варианте осуществления, при вычислении целевой функции J(w), ограничивающее условие относительно величины состояния, отличной от EGR-пропорции, такой как частота вращения турбины и давление выхлопа, может учитываться, аналогично модификации первого варианта осуществления.
Как описано выше, устройства управления согласно вариантам осуществления включают в себя эталонный регулятор. Эталонный регулятор вычисляет, с помощью модели прогнозирования, извлекаемой при условии, что вторичная задержка возникает в отклике управляющего вывода, прогнозированное максимальное значение перерегулирования управляющего вывода из целевого значения, на основе текущего значения управляющего вывода (такого как давление наддува, EGR-пропорция, температура фильтра 44 и давление топлива), предварительного целевого значения управляющего вывода и текущего темпа изменения управляющего вывода, и вычисляет целевое значение посредством коррекции предварительного целевого значения управляющего вывода на основе прогнозированного максимального значения таким образом, чтобы увеличивать степень удовлетворения ограничивающего условия относительно управляющего вывода.
В варианте осуществления, модель прогнозирования извлекается при условии, что вторичная задержка возникает в отклике управляющего вывода. Тем не менее, в зависимости от типа управляющего вывода и т.п., модель прогнозирования может извлекаться при условии, что возникает первичная задержка или третья задержка. Это позволяет вычислять прогнозированное максимальное значение перерегулирования управляющего вывода из целевого значения с большей точностью. Следовательно, модель прогнозирования может извлекаться при условии, что первичная задержка или многомерная задержка, которая представляет собой третью задержку или задержку высшего порядка.




Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Система управления оборудованием
Система управления силовой установкой

