Результат интеллектуальной деятельности: ПОДДЕРЖИВАЮЩАЯ СТРУКТУРА
Вид РИД
Изобретение
Область изобретения
Настоящее изобретение относится к поддерживающей структуре, в частности, предназначенной для инвалидов, для помощи им в движении в повседневной жизни, возможно без дополнительного помощника.
Предшествующий уровень техники
Известные устройства, предназначенные для инвалидов, содержат инвалидные кресла-каталки, возможно, моторизованные, или так называемые "ходунки", помогающие инвалидам поддерживать вертикальное положение. Однако, кресла-каталки не активируют ноги инвалидов и не позволяют им вставать. Ходунки для ходьбы требуют от инвалидов значительных мышечных усилий на руках, поскольку вертикальное положение поддерживается за счет прочного удержания ходунков руками человека, а ходьба требует толкания или подъема ходунков. В результате все еще существует потребность в другом устройстве, предназначенном для помощи инвалидам при ходьбе в повседневной жизни, но не требующего значительных усилий от таких лиц.
Кроме того, известны двуногие роботы и двуногие экзоскелеты, способные ходить. Однако операция ходьбы для большинства из них реализуется через серию квазистатических положений, включая подъем одной ноги, в то же время поддерживая равновесие на другой ноге, перемещение поднятой ноги вперед, опускание ее вновь на землю и перенос веса робота на эту ногу. Однако такая операция квазистатической ходьбы имеет ограниченную скорость, в отличие от динамического равновесия, возникающего при движениях ходьбы человека и животных. В частности, известные роботы и экзоскелеты не выполняют чередование между вытягиванием одной ноги и сгибанием ее и не реализуют временный дисбаланс от подъема до установки одной ноги на землю. В силу этих причин известные двуногие роботы и экзоскелеты не могут ходить плавными и непрерывными движениями и не могут бежать ни в медленном, ни в быстром темпе.
Исходя из это ситуации, одной из задач настоящего изобретения является создание нового устройства, способного помогать инвалидам ходить в повседневной жизни, а также, при необходимости, подниматься или спускаться по лестнице.
В частности, согласно настоящему изобретению предлагается структура, предназначенная для помощи инвалидам и обеспечивающая при ходьбе плавные и непрерывные движения с переменной скоростью.
Другой задачей настоящего изобретения является обеспечение возможности для инвалида передвигаться пешим ходом при восстановительных физических упражнениях.
Еще одной задачей настоящего изобретения является создание такого устройства, которое имеет уменьшенный вес и размеры, или которое способно принимать конфигурацию с уменьшенными размерами.
Краткое описание изобретения
Для достижения по меньшей мере одной из этих или других целей, согласно настоящему изобретению предлагается поддерживающая структура, содержащая:
- часть, принимающую нагрузку, предназначенную для приема нагрузки, которую нужно транспортировать или которой нужно оказать помощь при движении;
две пары ножек, каждая пара ножек расположена на одной боковой стороне части, принимающей нагрузку, которая противоположна другой боковой стороне части принимающей нагрузку, предназначенной для другой пары ножек, при этом все ножки отходят от части, принимающей нагрузку в направлении земли, когда поддерживающая структура находится в эксплуатационном состоянии на горизонтальной поверхности, и выполнены с возможностью удерживать часть, принимающую нагрузку, над землей; и
четыре колеса с соответствующими осями вращения, ориентированными горизонтально, когда поддерживающая структура находится в эксплуатационном состоянии на горизонтальной поверхности, при этом на нижнем конце каждой ножки, противоположном концу, которым ножка соединена с частью, принимающей нагрузку, установлено одно из колес.
Согласно одному признаку настоящего изобретения, каждая ножка содержит верхний сегмент и нижний сегмент, при этом для каждой ножки верхний конец верхнего сегмента соединен с возможностью вращения с частью, принимающей нагрузку, первой осью поворота, а нижний конец верхнего сегмента соединен с возможностью поворота с верхним концом нижнего сегмента второй осью поворота. Нижний конец нижнего сегмента образует нижний конец ножки, противоположный соединению ножки с частью, принимающей нагрузку. Первая и вторая оси поворота всех ножек параллельны и горизонтальны, когда поддерживающая структура находится в эксплуатационном состоянии на горизонтальной поверхности. Таким образом, благодаря повороту верхних сегментов ножек относительно части, принимающей нагрузку, и повороту нижних сегментов ножек относительно верхних сегментов ножек, поддерживающая структура может переводиться в сложенную конфигурацию, что уменьшает ее габариты, а также в разложенную конфигурацию, повышающую стабильность над землей.
Дополнительно, поддерживающая структура выполнена с возможностью перевода в опорное положение со скрещенными ножками в эксплуатационном состоянии, когда все колеса расположены на земле и в котором обе ножки с каждой боковой стороны принимающей нагрузку части отходят вниз, перекрещиваясь друг с другом в проекции на сагиттальную плоскость поддерживающей структуры. В частности, в таком опорном положении со скрещенными ножками, скрещивание ножек позволяет уменьшить габариты поддерживающей структуры, облегчая движение вместе с ней или позволяя пробираться в узких местах.
Согласно дополнительному признаку изобретения поддерживающая структура далее выполнена с возможностью опускать принимающую нагрузку часть к земле из ее опорного положения со скрещенными ножками путем изгиба каждой ножки вверх вокруг второй оси этой ножки так, чтобы уменьшить угол между верхним и нижним сегментами ножки на второй оси, одновременно для всех четырех ножек. Таким образом, первое расстояние между обоими колесами на каждой боковой стороне принимающей нагрузку части увеличивается, тогда как обе ножки на каждой боковой стороне принимающей нагрузку части остаются перекрещенными в проекции на сагиттальную плоскость. Таким образом, поддерживающая структура по настоящему изобретению позволяет непрерывно и плавно опускать принимающую нагрузку часть. В частности, когда поддерживающая структура по настоящему изобретению используется как экзоскелет для инвалида, такое непрерывное опускание позволяет выполнить трансформацию из ходунков, предназначенных для ходьбы, в конфигурацию кресла-каталки без воздействия помощника на структуру.
Благодаря конфигурации, имеющей четыре ножки, каждая из которых содержит два сегмента, поддерживающая структура по настоящему изобретению может совершать непрерывные и плавные движения ходьбы, включая динамическое равновесие при чередовании вытягивания и изгиба каждой ножки, и имеет небольшую продолжительность дисбаланса.
Предпочтительно, поддерживающая структура далее моет быть выполнена так, чтобы во время опускания принимающей нагрузку части из опорного положения со скрещенными ножками оба верхних сегмента на каждой боковой стороне принимающей нагрузку части одновременно расширялись за счет поворота этих верхних сегментов вокруг первых осей в противоположных направлениях так, чтобы увеличить второе расстояние между вторыми осями с каждой боковой стороны принимающей нагрузку части. Такое расширение верхних сегментов ножек также уменьшает или устраняет увеличение первого расстояния между колесами на каждой боковой стороне, поскольку оно вызывается только изгибом ножек вокруг вторых осей. Такие повороты вокруг первых осей дополнительно способствуют уменьшению общих габаритов поддерживающей структуры в опущенной конфигурации.
Возможно, поддерживающая структура далее моет быть выполнена так, чтобы опускание принимающей нагрузку части продолжалось до тех пор, пока упорные поверхности, соответственно верхнего и нижнего сегмента каждой ножки, не войдут в контакт друг с другом на всех четырех ножках так, чтобы остановить дальнейшее уменьшение угла между верхним и нижним сегментами каждой ножки. Альтернативно, опускание принимающей нагрузку части может продолжаться до тех пор, пока четыре ножки не войдут в контакт с землей четырьмя вторыми осями, в дополнение к четырем колесам, или любыми другими выступающими частями нижних сегментов ножек.
В предпочтительных вариантах изобретения поддерживающая структура может содержать по меньшей мере первую систему двигателе, выполненную с возможностью приводить нижние сегменты ножек во вращение вокруг их соответствующих вторых осей, а также, при необходимости, одновременно приводить верхние сегменты ножек во вращение вокруг их соответствующих первых осей во время опускания принимающей нагрузку части из опорного положения со скрещенными ножками. Изменение конфигурации поддерживающей структуры, таким образом, можно осуществлять без усилий со стороны пользователя, оператора или помощника. В частности, первая система двигателей может содержать узлы двигателей, каждый из которых предназначен для поворота одного из верхнего и нижнего сегментов ножек вокруг одной из первой и второй осей, отдельно от других узлов двигателей, предназначенных для поворота других верхних и нижних сегментов ножек.
Преимущественно, поддерживающая структура далее может быть выполнена с возможностью двигать ножки вокруг первых осей из опорного положения со скрещенными ножками так, чтобы вывести из перекрещивания обе ножки на каждой боковой стороне принимающей нагрузку части, в проекции на сагиттальную плоскость, тем самым принимаю положение с не скрещенными ножками. Таким образом дополнительно улучшается стабильность на земле поддерживающей структуры, находящейся в конфигурации с не скрещенными ножками. Далее, она может быть выполнена с возможностью перемещения ножек из положения с нескрещенными ножками, так, чтобы производить движения ходьбы типа ходьбы четырехногого животного. Такие движения ходьбы могут лучше подходить для неровной земли, чем качение с помощью колес, тогда как качение позволяет быстрее и более плавно передвигаться по ровной земле.
Возможно, в поддерживающей структуре может быть расположена по меньшей мере одна вторая система двигателей для привода во вращение по меньшей мере двух из колес так, чтобы поддерживающая структура двигалась по земле способом качения.
Также преимущественно, каждая ножка может далее содержать убираемый выдвижной сегмент ножки, расположенный для выдвижения вниз так, чтобы отталкиваться от земли вместо колеса этой ножки. Затем, каждый выдвижной сегмент ножки может быть снабжен контактирующей с землей подушкой и выдвигаться на такую длину, чтобы ножка была длиннее в выдвинутым выдвижным сегментом, чем ножка, контактирующая с землей колесом, когда выдвижной сегмент ножки не выдвинут. Такие выдвижные сегменты также могут повышать стабильность поддерживающей структуры на земле. Дополнительно, с помощью контактирующих с землей подушек можно предотвратить нежелательное качение поддерживающей структуры по земле. Затем, поддерживающая структура далее может быть выполнена с возможностью управления подъемом на ступеньку или по лестнице с помощью выдвижных сегментов ножек, выдвинутых по меньшей мере на двух ножках. Также, выдвижные сегменты ножек могут компенсировать высоту ступени и, таким образом, поддерживать принимающую нагрузку часть по существу в горизонтальном положении. Предпочтительно, выдвижение и/или убирание каждого выдвижного сегмента ножки может осуществляться системой двигателей.
Для первых применений настоящего изобретения поддерживающая структура может быть выполнена с возможность образования экзоскелета для инвалида, в котором принимающая нагрузку часть является сиденьем или спинкой, предназначенной для поддержки таза и/или торса инвалида. Для таких применений изобретения колеса могут быть свободными колесами во время по меньшей мере частичного периода эксплуатации поддерживающей структуры инвалидом. Таким образом, поддерживающая структура может быть выполнена с возможностью движения по земле ногами инвалида, контактирующими с землей и отталкивающимися от нее, в то время как таз или торс инвалида поддерживается принимающей нагрузку частью. Кроме того, поддерживающая структура может содержать две соединенных опоры, которые выдвигаются из принимающей нагрузку части и выполненные возможностью двигать ноги инвалида в координации с движением поддерживающей структуры. Для таких видов применения для инвалидов по меньшей мере часть принимающей нагрузку части, образующая сиденье или спинку, может поворачиваться вокруг горизонтальной оси, относительно положений первых осей, предпочтительно, независимо от положений и поворотов сегментов ножек.
В другом варианте применения настоящего изобретения принимающая нагрузку часть может быть адаптирована для двуногого робота, стоящего на земле и имеющего возможность ходить, и поддерживающая структура повышает стабильность двуногого робота.
В других вариантах применения поддерживающая структура может быть выполнена как часть наземного дрона, способного двигаться по разным типам поверхностей и преодолевать препятствия.
Краткое описание чертежей
Далее следует описание этих и других признаков изобретения со ссылками на приложенные чертежи, относящиеся к предпочтительным, но не ограничивающим вариантам изобретения.
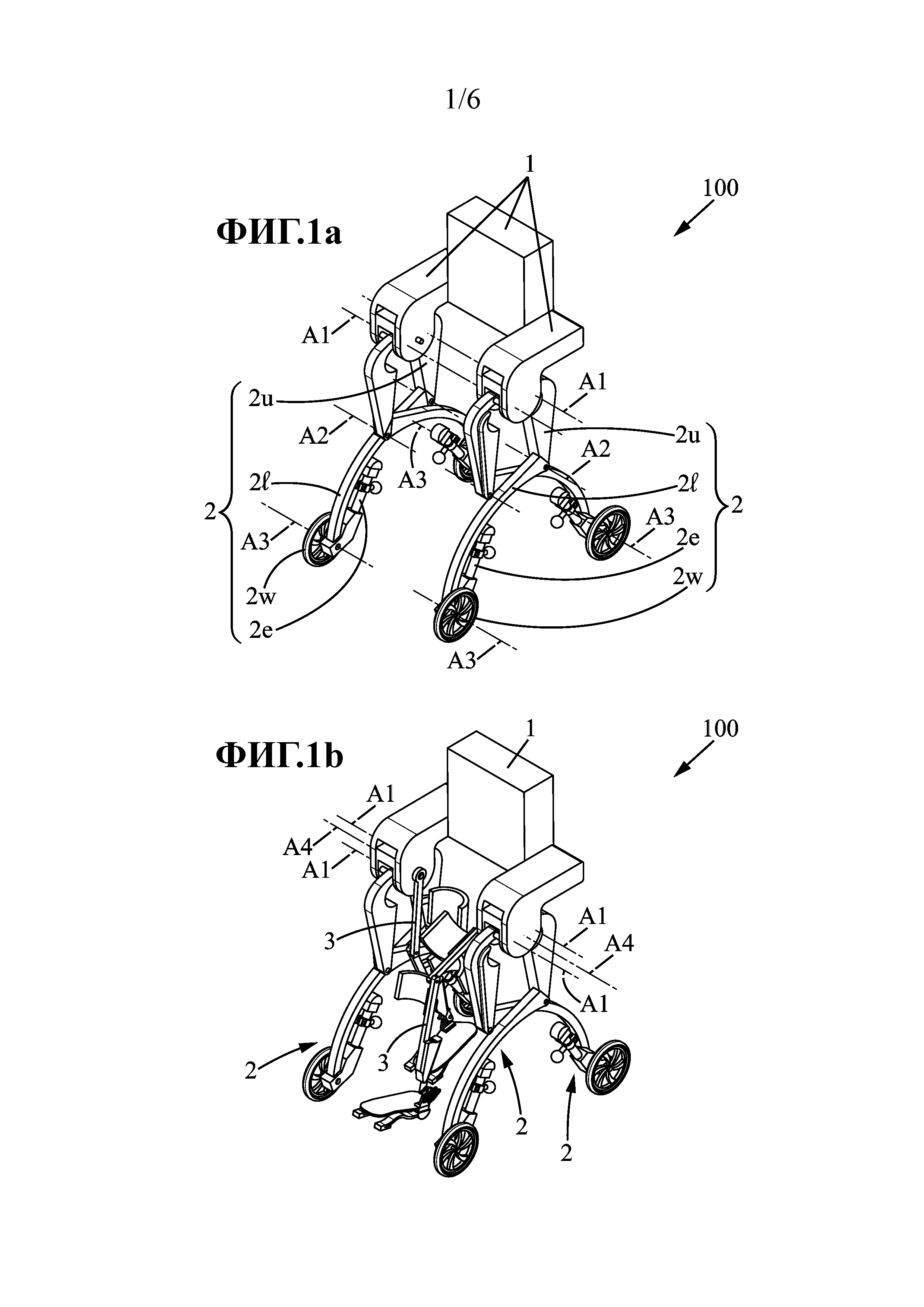
Фиг. 1а и 1b изображают два вида в изометрии поддерживающей структуры по настоящему изобретению.
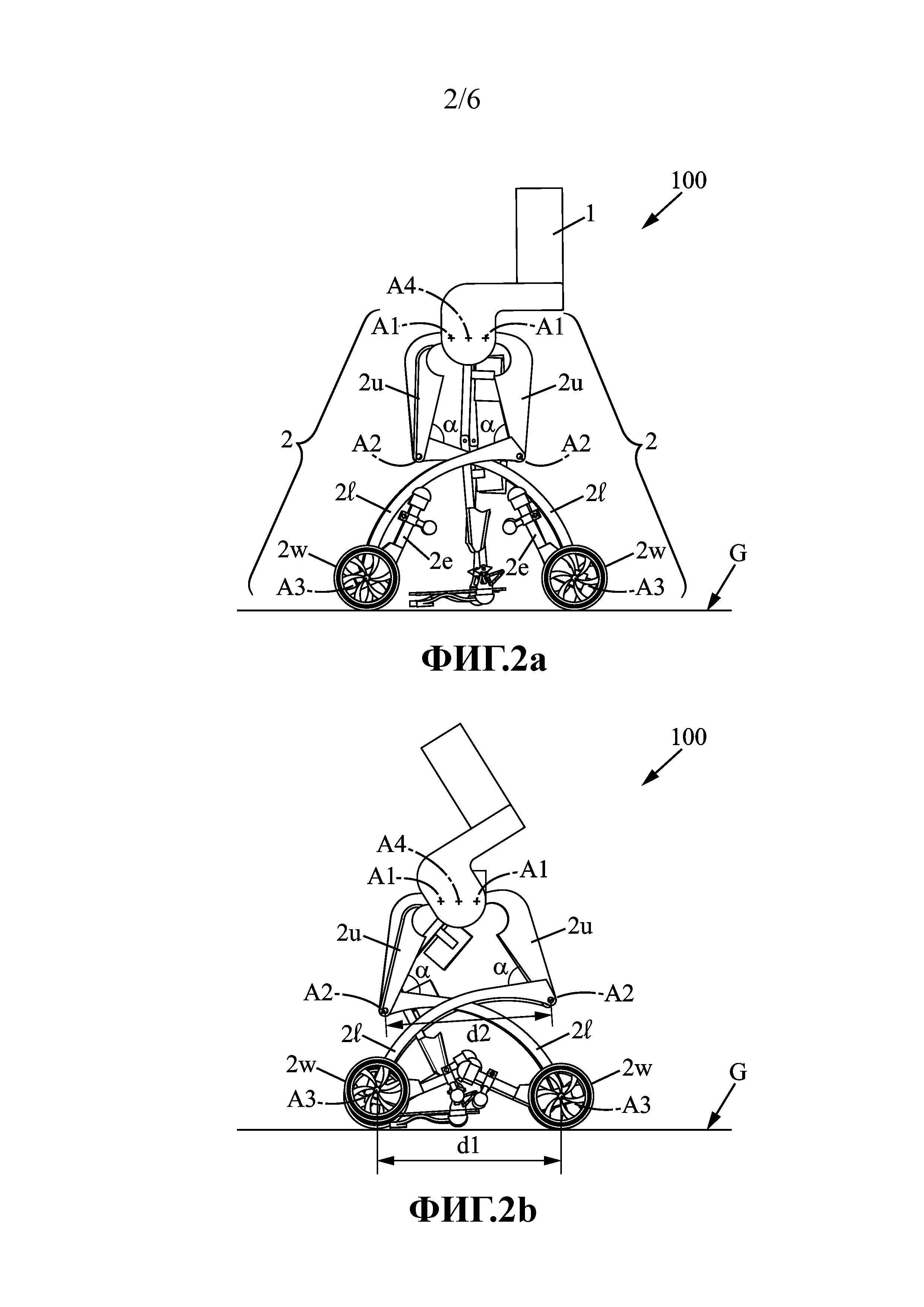
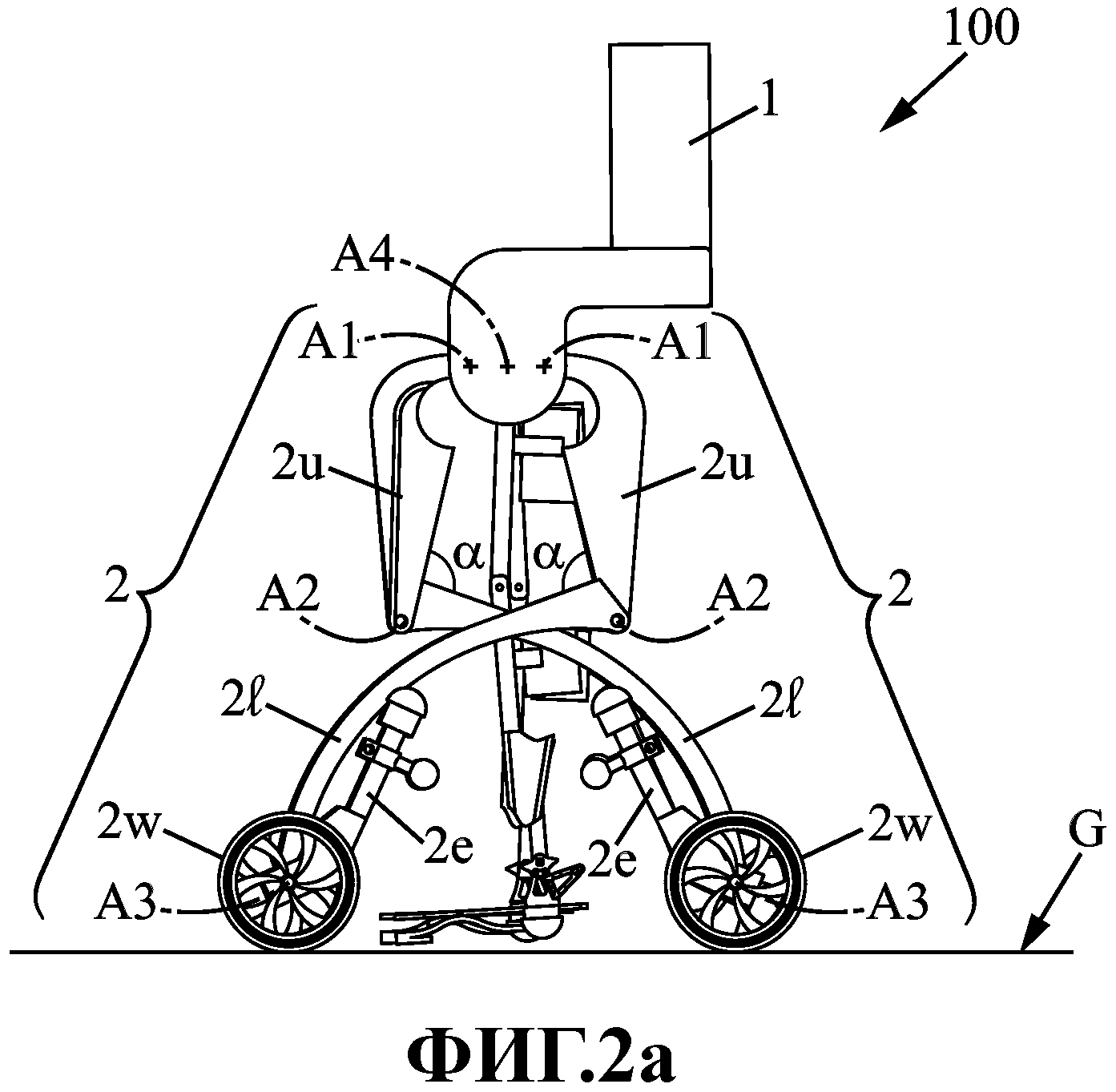
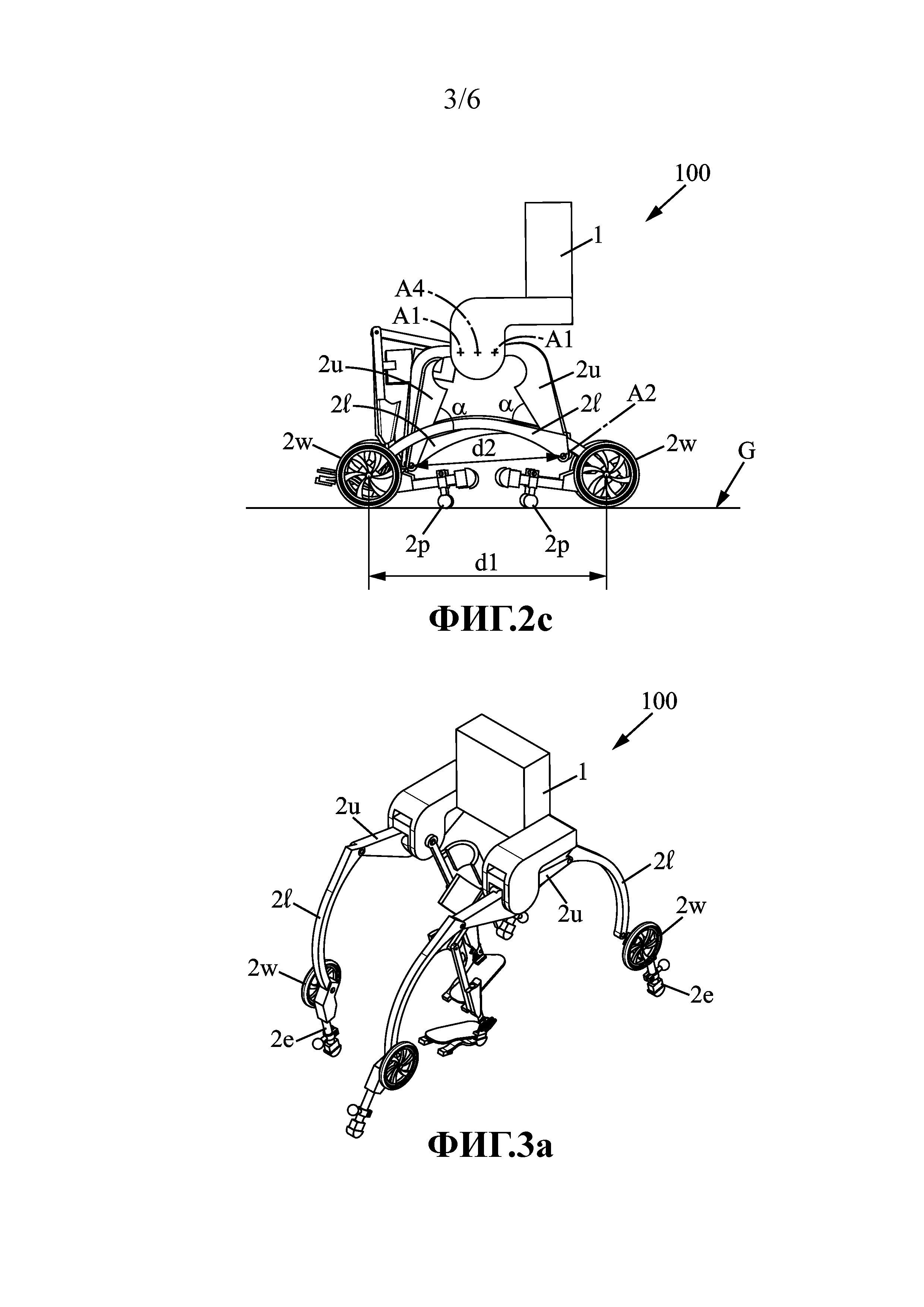
Фиг. 2а-2с иллюстрируют движения опускания поддерживающей структуры по фиг. 1а и 1b.
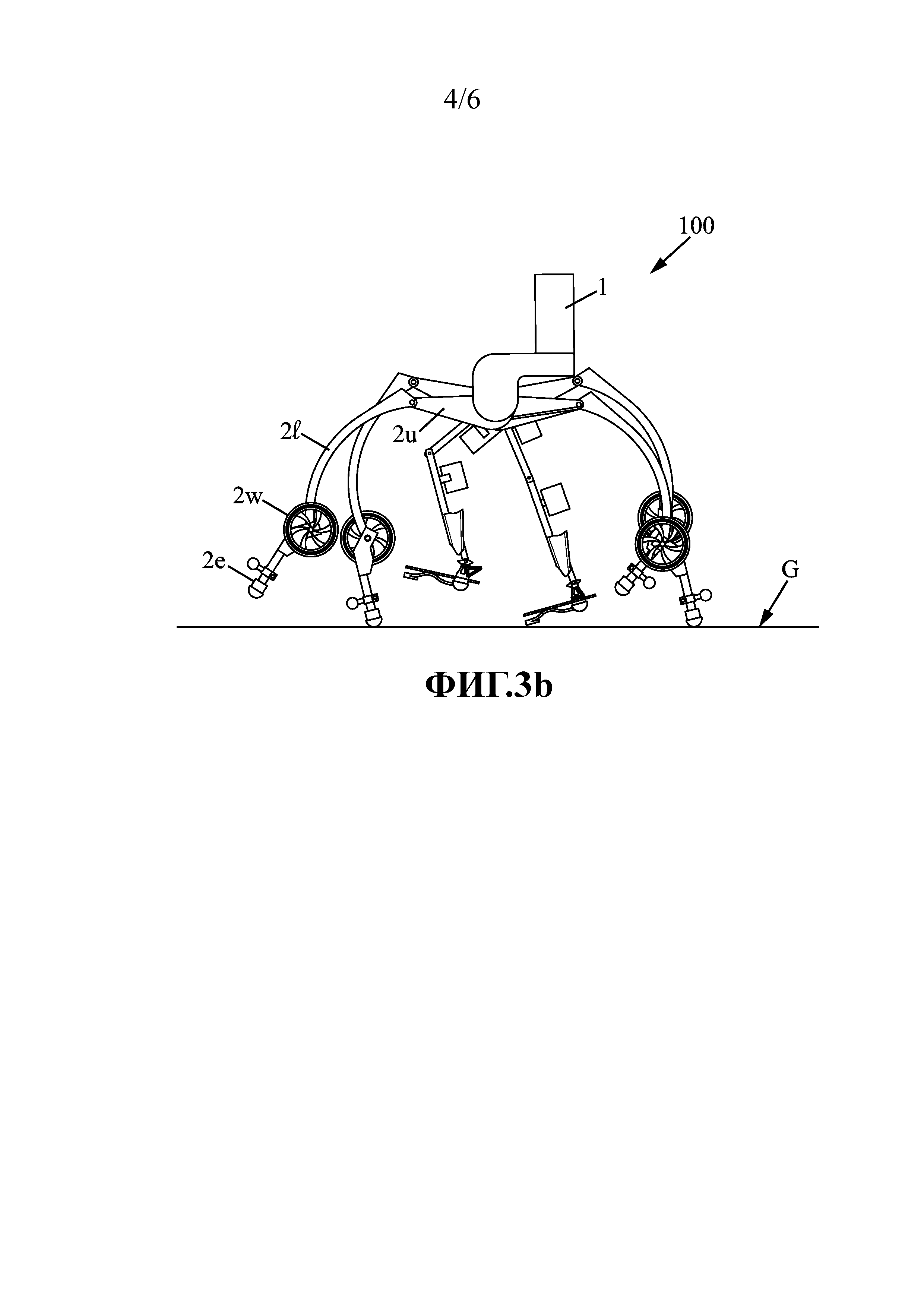
Фиг. 3а и 3b - иллюстрируют другое пространственное положение поддерживающей структуры по фиг. 1а и 1b, предназначенное для перемещения по земле.
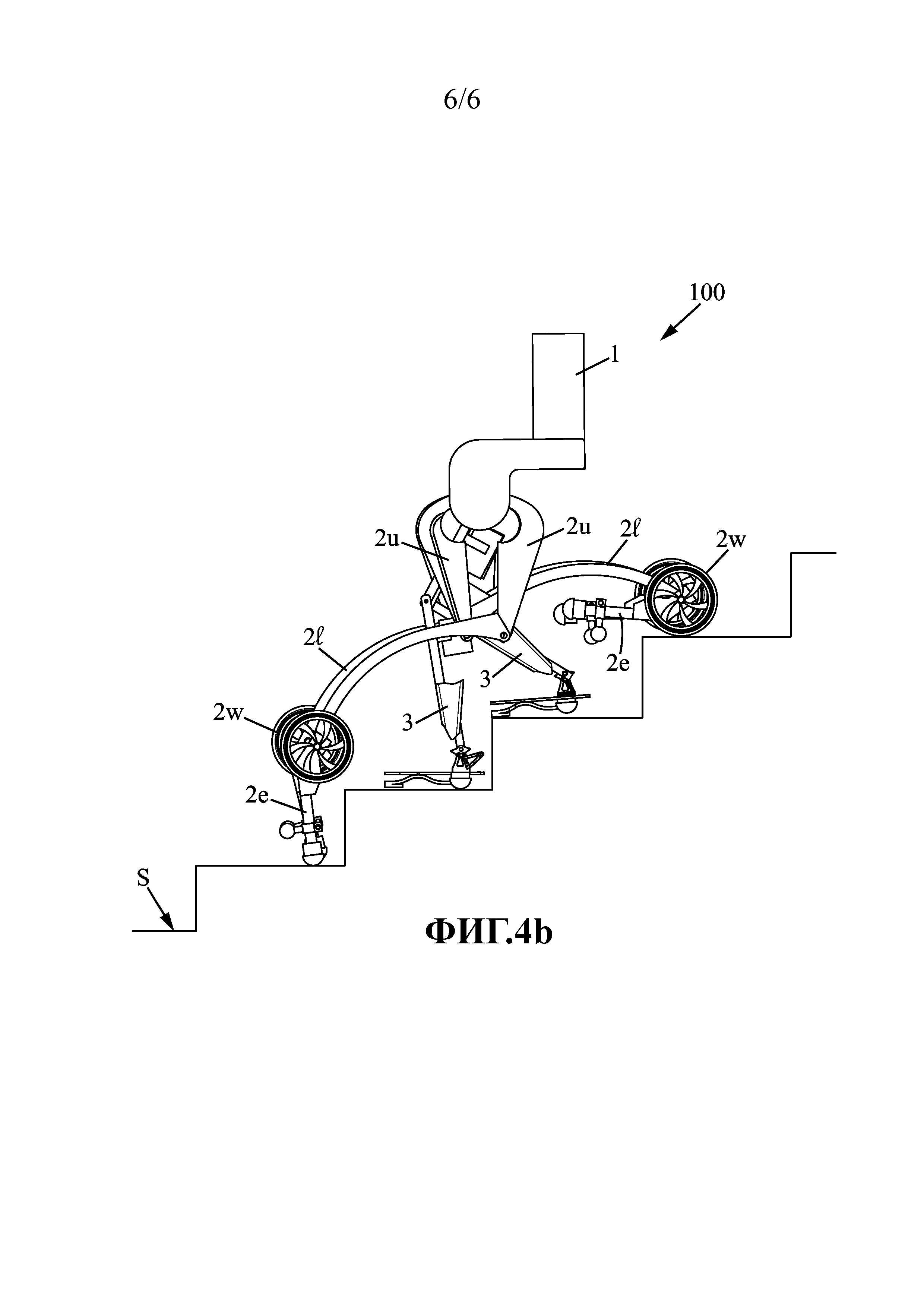
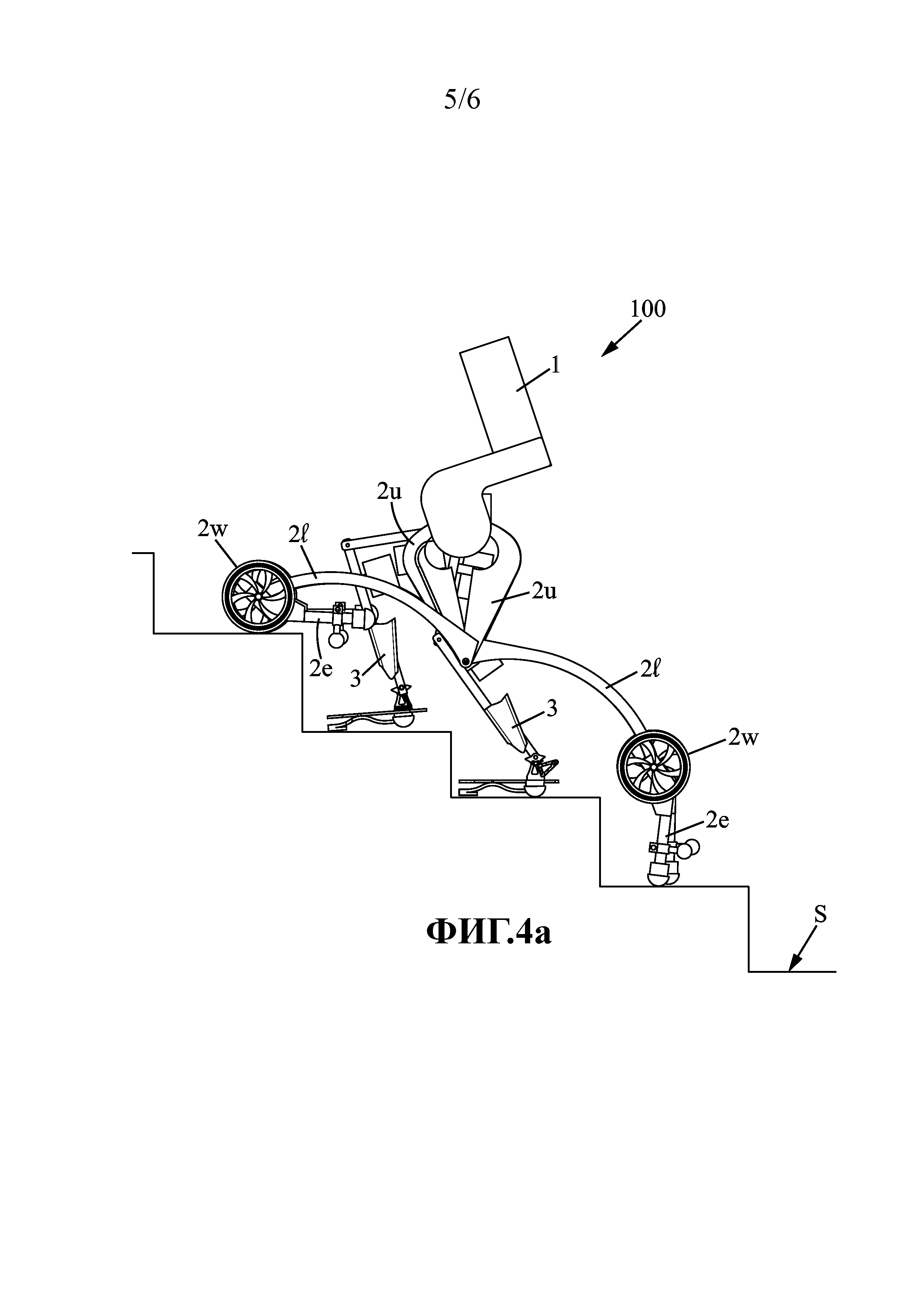
Фиг. 4а и 4b - иллюстрируют другие пространственные положения поддерживающей структуры по фиг. 1а и 1b, предназначенные для подъема или спуска по лестнице, соответственно.
Для облегчения понимания размеры на чертежах не соответствуют реальным размерам или соотношениям размеров. Кроме того, одни и те же ссылочные позиции н разных чертежах обозначают идентичные элементы или элементы, выполняющие идентичные функции.
Подробное описание изобретения
На фиг. 1 в упрощенной форме представлена поддерживающая структура по настоящему изобретению. Структура в целом обозначена позицией 100 и содержит принимающую нагрузку часть 1 и четыре ножки, каждая из которых обозначена позицией 2. Ножки разделены на две пары, каждая пара ножек находится на боковой стороне принимающей нагрузку части 1, симметрично с другой парой ножек, расположенной на другой боковой стороне, однако любая ножка моет иметь мгновенное положение, отличающееся от положения других ножек. Предпочтительно обе ножки, соединенные с принимающей нагрузку частью 1, смещены в сторону передней части структуры 100, одна такая нока на каждой боковой стороне имеет симметричную конструкцию, и обе ножки, соединенные с принимающей нагрузку частью 1, смещены к задней части структуры 100. Возможно, обе ножки на одной и той же боковой стороне могут иметь симметричную конструкцию, но перевернутую в соответствии с направлениями вперед и назад.
Если не указано иное, описание относится к поддерживающей структуре 100, расположенной на горизонтальной поверхности так, что ножки 2 поддерживают принимающую нагрузку часть 1 на расстоянии над землей. В частности, каждая ножка 2 проходит от принимающей нагрузку части 1 вниз в опорном положении ножек. Каждая ножка 2 содержит верхний сегмент 2u ножки, нижний сегмент 2l ножки, колесо 2w, и, при необходимости, дополнительную выдвижную ножку, которая будет описана ниже. В опорном положении ножки в каждой ножке 2 верхний конец верхнего сегмента 2u ножки расположен выше над землей, чем нижний конец этого же сегмента 2u ножки, и верхний конец нижнего сегмента 2l ножки также расположен вше над елей, чем нижний конец этого же нижнего сегмента 2l ножки. Кроме того, в каждой ножке 2 верхний конец верхнего сегмента 2u соединен с принимающей нагрузку частью 1 через систему поворотного соединения, имеющую ось А1 поворота, которая в общем описании, приведенном выше, названа первой осью. Нижний конец верхнего сегмента 2u ножки соединен с верхним концом нижнего сегмента 2l той же ножки через другую систему поворотного соединения, имеющую ось А2 поворота, которая в общем описании, приведенном выше, названа второй осью. Каждое колесо 2w соединено с нижним концом нижнего сегмента 2l каждой ножки еще одной системой поворотного соединения, имеющей ось А3 поворота. Четыре оси А1 поворота, четыре оси А2 поворота и, возможно, также, четыре оси А3 поворота проходят горизонтально и параллельно друг другу, перпендикулярно вертикальной сагиттальной плоскости структуры 100, проходящей между обеими боковыми сторонами. Предпочтительно, каждая система поворотного соединения с осями А1, А2 и А3 имеет узел двигателя (не показан), выполненный с возможностью поворачивать подсоединенные элементы относительно друг друга. Также предпочтительно, узлы двигателей для поворота вокруг осей А1 или А2 являются серводвигателями. Все узлы двигателей для поворота вокруг осей а! или А2 образуют первую систему двигателей, предназначенную для изменения пространственного положения ножек. Узлы двигателей, предназначенные для привода колес 2w во вращение вокруг осей А3, образуют вторую систему двигателей, предназначенную для качения поддерживающей структуры 100 по земле. Движение поддерживающей структуры 100 по земле может создаваться четырьмя узлами двигателей, имеющимися для колес 2w, за счет соответствующего управления вращением всех колес. Для изменения направления движения, т.е., для изменения ориентации движения вперед поддерживающей структуры 100 в плоскости, параллельной земле, можно соответственно управлять вращением всех четырех колес 2w по часовой стрелке или против часовой стрелки, а также частотой их вращения. Таким образом, проскальзывание и трение вращающихся колес 2w относительно земли приводят к повороту поддерживающей структуры 100 влево или вправо. По меньшей мере одна из первой и второй систем двигателей может получать питание от аккумуляторов (не показаны), расположенных на поддерживающей структуре 100, например, находящихся внутри принимающей нагрузку части 1 или прикрепленных к ней. Предполагается, что координированное управление всеми узлами двигателей понятно специалистам в робототехнике и не требует изобретательских усилий.
На фиг. 1b показана завершенная версия фиг. 1а, когда поддерживающая структура предназначена для помощи инвалиду в движении по земле. Для такого варианта применения принимающая нагрузку часть 1 может быть сиденьем или спинкой для поддержки таза или торса инвалида. Далее, принимающая нагрузку часть 1 вместе с четырьмя ножками 2 образуют экзоскелет, способный транспортировать инвалида или помогать ему двигаться по земле. Предпочтительно, поддерживающая структура 100 далее может быть выполнена так, что принимающая нагрузку часть 1 может изменять угол ориентации вокруг дополнительной оси А4, проходящей по существу между первыми осями А1 на каждой боковой стороне и параллельной осям А1. Такой поворот сиденья и/или спинки, образующих принимающую нагрузку часть 1, позволяет инвалиду принимать разные пространственные положения для сохранения равновесия. Например, поддерживающая структура 100 может приводиться в движение по земле ногами инвалида, контактирующими с землей и отталкивающимися от нее, в то время как его таз или торс поддерживаются принимающей нагрузку частью 1. Для такой операции колеса 2w могут быть свободными колесами, чтобы не мешать движению поддерживающей структуры 100 по земле, когда ее проводит в движение человек. Кроме того, в таких вариантах изобретения колеса 2w могут быть поворотными колесами с поворотными осями, ориентированными вертикально, также чтобы не мешать движению, создаваемому человеком. Как показано на фиг. 1b, поддерживающая структура 100, предназначенная для инвалидов далее может содержать две соединенные опоры 3, предназначенные для поддержки ног инвалида или для помощи ему в приведение ног в движение. В частности, опоры 3 могут быть сегментированы с промежуточными поворотными соединителями для управления пространственным положением бедер, голеней и стоп инвалида. Дополнительно, каждая опора 3 может содержать соответствующие контактные области для прижимания к бедрам, голеням и подошвам.
На фиг. 2а-2с показаны основные изменения пространственного положения, создаваемые поддерживающей структурой 100 по настоящему изобретению. Такие изменения пространственного положения приводят к изменению высоты принимающей нагрузку части 1 над землей, обозначенной позицией G. Начиная с опорного положения со скрещенными ножками, показанного на фиг. 2а, когда ножки занимают постоянно симметричное пространственное положение, ножки одновременно изгибаются вверх за счет управления поворотом нижних сегментов 2l вокруг осей А2 так, чтобы уменьшить угол α между верхним сегментом 2u ножки и нижним сегментом 2l ножки, при этом вершина угла лежит на осях А2. Это приводит к увеличению расстояния d1 между передними и задними колесами 2w на каждой боковой стороне с одновременным опусканием принимающей нагрузку части 1. Предпочтительно, поворот верхних сегментов 2u ножек относительно принимающей нагрузку части 1 также активируется одновременно, чтобы раздвинуть верхние сегменты 2u ножек одновременно на обеих боковых сторонах. Это приводит к дальнейшему опусканию принимающей нагрузку части 1 с одновременным уменьшением увеличения расстояния d1 между передними и задними колесами 2w. Одновременно раздвигание верхних сегментов 2u ножек увеличивает расстояние d2 между осями А2 обеих ножек 2 на каждой стороне. Таким образом, общая длина поддерживающей структуры 100 параллельно земле G в опущенном пространственном положении уменьшается по сравнению с ситуацией, когда ножки 2 изгибаются только вокруг осей А2. Упорные поверхности, которые могут иметься на верхнем сегменте 2u и на нижнем сегменте 2l ножек, могут входить в контакт друг с другом на всех ножках так, чтобы блокировать дальнейшее уменьшение углов α и, каким образом, останавливать опускание принимающей нагрузку части 1. Альтернативно, опускание может продолжаться до тех пор пока четыре ножки 2 не войдут в контакт с землей не только колесами 2w, но и осями А2. В качестве другой альтернативы на ножках 2 могут иметься выступающие участки 2р (фиг. 2с), которые зафиксированы относительно нижних сегментов 2l ножек во время опускания принимающей нагрузку части 1. В этом случае опускание может продолжаться до тех пор, пока эти выступающие части 2р не войдут в контакт с землей G. Возможно, поворот вокруг осей А2 может продолжаться до тех пор, пока колеса 2w не поднимутся над землей G и поддерживающая структура 100 не будет стоять на земле G только выступающими частями 2р.
Для помощи инвалиду предпочтительно, чтобы принимающая нагрузку часть 1, образующая сиденье/спинку, была наклонена вперед, чтобы помогать человеку поддерживать равновесие во время движения посадки (см. фиг. 2b).
Движение поддерживающей структуры 100, обратное только что описанному движению опускания, приводит к увеличению высоты принимающей нагрузку части 1 над землей G. Это может соответствовать вставанию инвалида из положения сидя.
Как только что было описано, пространственные положения поддерживающей структуры 100 с перекрещенными ножками 2 на каждой боковой стороне, являются преимущественными в большом количестве ситуаций. А именно, в таких положениях с перекрещенными ножками нижний конец ножки на одной боковой стороне, у которой ось А1 сдвинута назад относительно оси А1 другой ножки на этой е боковой стороне, находится в положении на земле, которое сдвинуто вперед относительно нижнего конца другой ножки на той же боковой стороне. Это относится к обеим боковым сторонам для так называемого положения со скрещенными ножками. Однако в других ситуациях преимущественным будет положение с не скрещенными ножками, например, когда нужна повышенная стабильность. Тогда для таких положений с не скрещенными ножками нижний конец ножки на одной боковой стороне, ось А1 которой сдвинута вперед относительно оси А1 другой ножки на той же боковой стороне, находится в положении на земле, которое смещено вперед относительно нижнего кона другой ножки на той же боковой стороне. Такие положения с не скрещенными ножками показаны на фиг. 3а и 3b. В частности, в опорном положении с не скрещенными ножками четыре ножки 2 могут быть выдвинуты прямо так, чтобы все углы α были равны 180°, вертикально или раздвинуты на каждой боковой стороне принимающей нагрузку части 1.
Например, вращение колес 2w можно затормозить, используя соответствующие устройства, блокирующие вращение, и четыре ножки 2 можно активировать из опорного положения с не скрещенными ножками для инициации движения ходьбы, аналогичного ходьбе четырехногого животного. Такое движение ходьбы может быть более подходящим, чем качение, на неровной земле, чтобы поддерживающая структура 100 двигалась, не причиняя ущерба.
В улучшенных вариантах изобретения имеются выдвижные сегменты 2е на нижних концах всех ножек 2. Такие выдвижные сегменты ножек применяются при необходимости, но если они применяются, каждый из них соединен с соответствующим нижним концом ножки так, чтобы иметь возможность выдвижения или втягивания. В выдвинутом положении каждый выдвижной сегмент 2е ножки контактирует с землей вместо колеса 2w. Предпочтительно, каждый выдвижной сегмент 2е ножки может быть снабжен контактирующей с землей подушкой, чтобы не допустить какого-либо скольжения по земле. Также предпочтительно, каждый выдвижной сегмент 2е ножки увеличивает общую длину соответствующей ножки 2 по сравнению с той же ножкой, контактирующей с землей колесом 2w. Выдвижение или втягивание каждого выдвижного сегмента 2е ножки может осуществляться системой двигателей, используя любую известную механическую конструкцию. Кроме того, каждый выдвижной сегмент 2е ножки может быть снабжен небольшим свободным колесом, которое соединено с этим сегментом в промежуточном положении на длине этого сегмента. Такие небольшие свободные колеса могут образовать выступающую часть 2р и могут быть полезны во время вытягивания каждого выдвижного сегмента ножки, чтобы его конец плавно двигался по земле.
На фиг. 3а и 3b показано первый преимущественный вариант эксплуатации выдвижных сегментов 2е для движения, напоминающего движение четырехногого животного. Эффективность увеличивается, во-первых, потому что колеса 2w не катятся по земле G и, во-вторых, поскольку увеличена длина ножки.
На фиг. 4а и 4b показано первый преимущественный вариант эксплуатации выдвижных сегментов 2е для подъема по лестнице S (фиг. 4а) или для спуска по лестницы (фиг 4b). Предпочтительно, чтобы при движении по лестнице выдвижные сегменты 2е ножек использовались только на двух ножках 2, которые расположены на лестнице внизу, чтобы компенсировать разницу в высоте между передними ножками и задними ножками. Синхронное движение всех четырех ножек 2 для подъема или спуска по лестнице можно легко запрограммировать. Для помощи инвалиду в движении и когда сиденье или спинку можно наклонить в проекции на сагиттальную плоскость, сиденье или спинка предпочтительно наклонены вперед при движении по лестнице вверх (фиг. 4а) для улучшения равновесия человека.
Очевидно, что настоящее изобретение может быть реализовано с адаптацией или изменением его вторичных аспектов относительно описанных выше, в то же время сохраняя по меньшей мере некоторые из описанных преимуществ. Например, первая система двигателей, предназначенная для поворота ножек 2 вокруг осей А1 и А2, и при необходимости, также, для выдвижения и втягивания выдвижных сегментов 2е ножек, может быть жидкостным насосом, соединенным с гидравлическими исполнительными механизмами, которые выполненные с возможностью приводиться в действие давлением жидкости, создаваемым этим насосом. Жидкостной насос может быть электрическим, используя для птания аккумуляторы, установленные на поддерживающей структуре. Каждый гидравлический исполнительный механизм может быть предназначен для поворота одного из верхних сегментов 2u ножек или нижних сегментов 2l ножек вокруг одной из осей А1 и А2, отдельно от других гидравлических исполнительных механизмов, предназначенных для поворота других верхних и нижних сегментов. Один отдельный гидравлический исполнительных механизм также может быть предназначен для выдвижения и втягивания каждого из выдвижных сегментов ножек. Возможно, такая гидравлическая система двигателей может использоваться дополнительно для привода во вращение колес 2w, чтобы двигать поддерживающую структуру 100 по земле. Один жидкостной насос может обслуживать все исполнительные механизмы для движения ножек и устройства привода колес.
Кроме того, формы и пропорции всех частей поддерживающей структуры, показанные на чертежах, предназначены только для целей иллюстрации и могут в значительной степени изменяться.
Другим применение поддерживающей структуры по настоящему изобретению может быть стабилизация двуногого робота. В этом случае принимающая нагрузку часть сконструирована для адаптации к двуногому роботу, стоящему на земле, и позволяет двуногому роботу ходить. Вращение колес 2w или движения ножек 2 синхронизированы с движениями ходьбы двуногого робота.
Еще одним вариантом применения поддерживающей структуры по настоящему изобретению может быть создание наземного дрона, способного передвигаться по разным поверхностям с разной скоростью. Применение выдвижных сегментов 2е ножек может позволить двигаться по пересеченной местности и преодолевать препятствия, тогда как качение позволяет двигаться с более высокой скоростью.