Результат интеллектуальной деятельности: РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ)
Вид РИД
Изобретение
Ссылка на родственную заявку
[0001] По настоящей заявке испрашивается приоритет в соответствии с заявкой на патент США № 15/179,539, озаглавленной “OPERATOR STATION FOR AN AUTONOMOUS WORK VEHICLE”, поданной 10 июня 2016 года, которая настоящим включена в данный документ путём ссылки в полном объёме.
Уровень техники
[0002] Настоящее изобретение относится в общем к рабочим транспортным средствам, таким как транспортные средства, используемые в сельскохозяйственных работах, и более конкретно к рабочему месту оператора для автономного рабочего транспортного средства.
[0003] В последние годы рабочие транспортные средства, такие как сельскохозяйственные тракторы, разрабатываются для по меньшей мере частично автономной работы (например, без ввода от лица, находящегося в транспортном средстве) для выполнения различных операций, например на полях, занятых сельскохозяйственными культурами. Например, контроллер может подавать команду системе рулевого управления и/или системе управления скоростью транспортного средства для автоматического или полуавтоматического направления транспортного средства в пределах поля. Однако некоторые операции оператор может выполнять более эффективно, чем автономные транспортные средства.
Раскрытие изобретения
[0004] В одном варианте осуществления рабочее транспортное средство содержит корпус, панель, выполненную с возможностью закрывать часть корпуса транспортного средства, и рабочее место оператора, выполненное с возможностью складывания внутри корпуса транспортного средства, что позволяет панели закрывать рабочее место оператора во время по меньшей мере частично автономного управления транспортным средством, и при этом рабочее место оператора выполнено с возможностью по меньшей мере частичного развёртывания за пределами корпуса транспортного средства, позволяя оператору управлять транспортным средством.
[0005] В другом варианте осуществления транспортное средство содержит корпус и рабочее место оператора, содержащее раскладываемое сиденье, при этом раскладываемое сиденье выполнено с возможностью складывания в сложенное положение внутри корпуса и раскладывания в положение для ручного управления по меньшей мере частично за пределами корпуса, позволяя оператору управлять транспортным средством с развернутого сиденья.
[0006] В дополнительном варианте осуществления транспортное средство содержит корпус, панель, выполненную с возможностью закрывать по меньшей мере часть корпуса, и рабочее место оператора, содержащее крепление, опору рулевого колеса и рулевое колесо, при этом рулевое колесо выполнено с возможностью выборочного соединения с креплением для складывания рулевого колеса внутри корпуса во время по меньшей мере частично автономного управления транспортным средством, и рулевое колесо выполнено с возможностью выборочного соединения с опорой рулевого колеса, чтобы обеспечить ручное управление транспортным средством.
Краткое описание чертежей
[0007] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятны при прочтении нижеследующего подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые позиции обозначают одинаковые части на всех чертежах, на которых:
[0008] На фиг. 1 представлен вид в перспективе варианта осуществления рабочего транспортного средства, которое содержит рабочее место оператора внутри корпуса транспортного средства, закрытого крышкой;
[0009] На фиг. 2 представлено схематичное изображение варианта осуществления системы управления, которую можно задействовать в транспортном средстве фиг. 1;
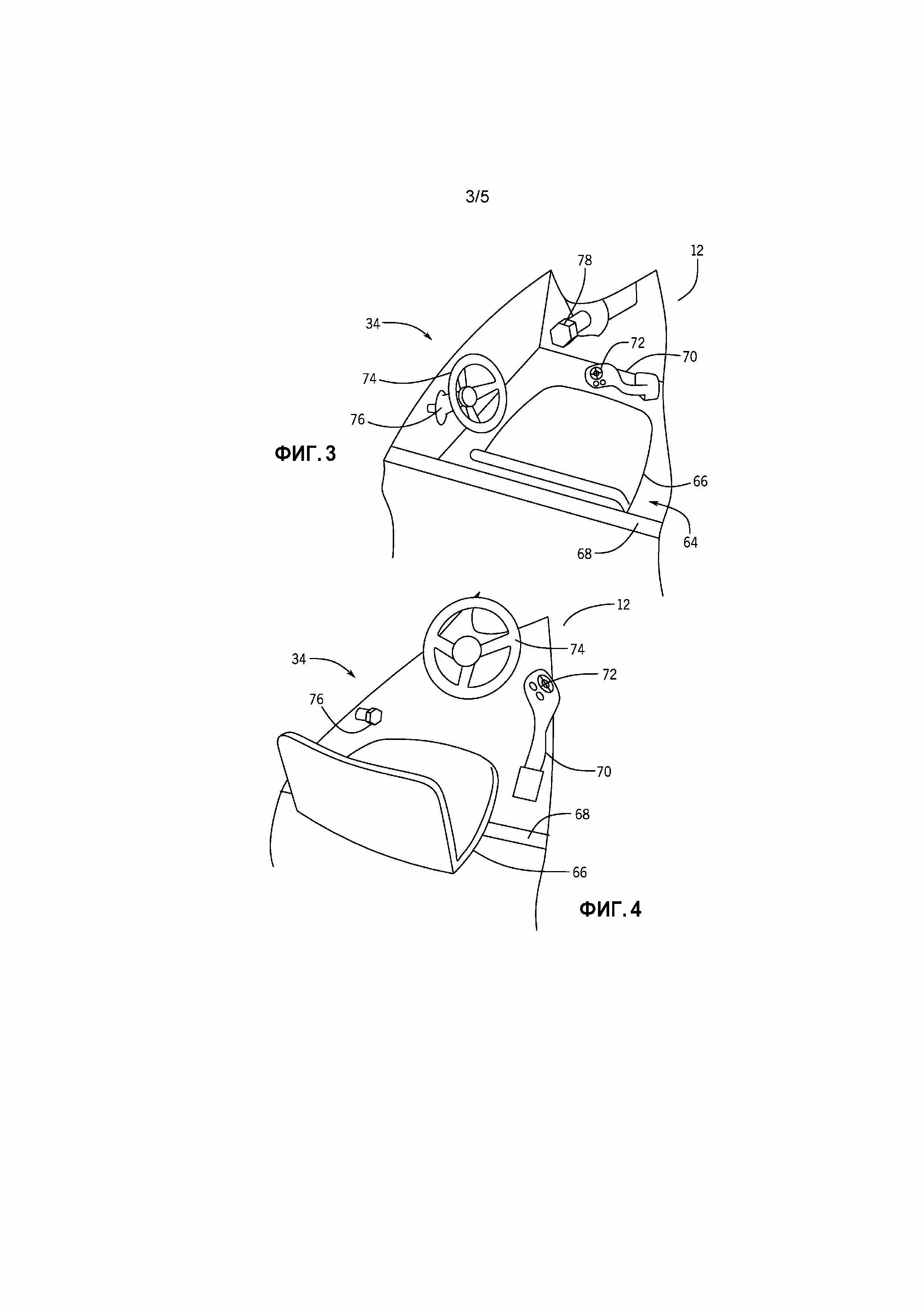
[0010] На фиг. 3 представлен вид в перспективе транспортного средства со снятой крышкой фиг. 1 с деталями рабочего места оператора в сложенных положениях;
[0011] На фиг. 4 представлен вид в перспективе варианта осуществления транспортного средства со снятой крышкой фиг. 1 с деталями рабочего места оператора в положениях для ручного управления;
[0012] На фиг. 5 представлен вид сбоку варианта осуществления рабочего места оператора фиг. 1, имеющего систему раскладываемого сиденья в сложенном положении;
[0013] На фиг. 6 представлен вид сбоку варианта осуществления рабочего места оператора фиг. 1 с системой раскладываемого сиденья в положении для ручного управления;
[0014] На фиг. 7 представлен покомпонентный вид спереди варианта осуществления системы ручного управления рабочего места оператора фиг. 1;
[0015] На фиг. 8 представлен вид спереди варианта осуществления системы раскладываемого сиденья рабочего места оператора фиг. 1, имеющего систему ручного управления; а
[0016] На фиг. 9 представлен вид в перспективе варианта осуществления системы раскладываемого сиденья рабочего места оператора фиг. 1.
Осуществление изобретения
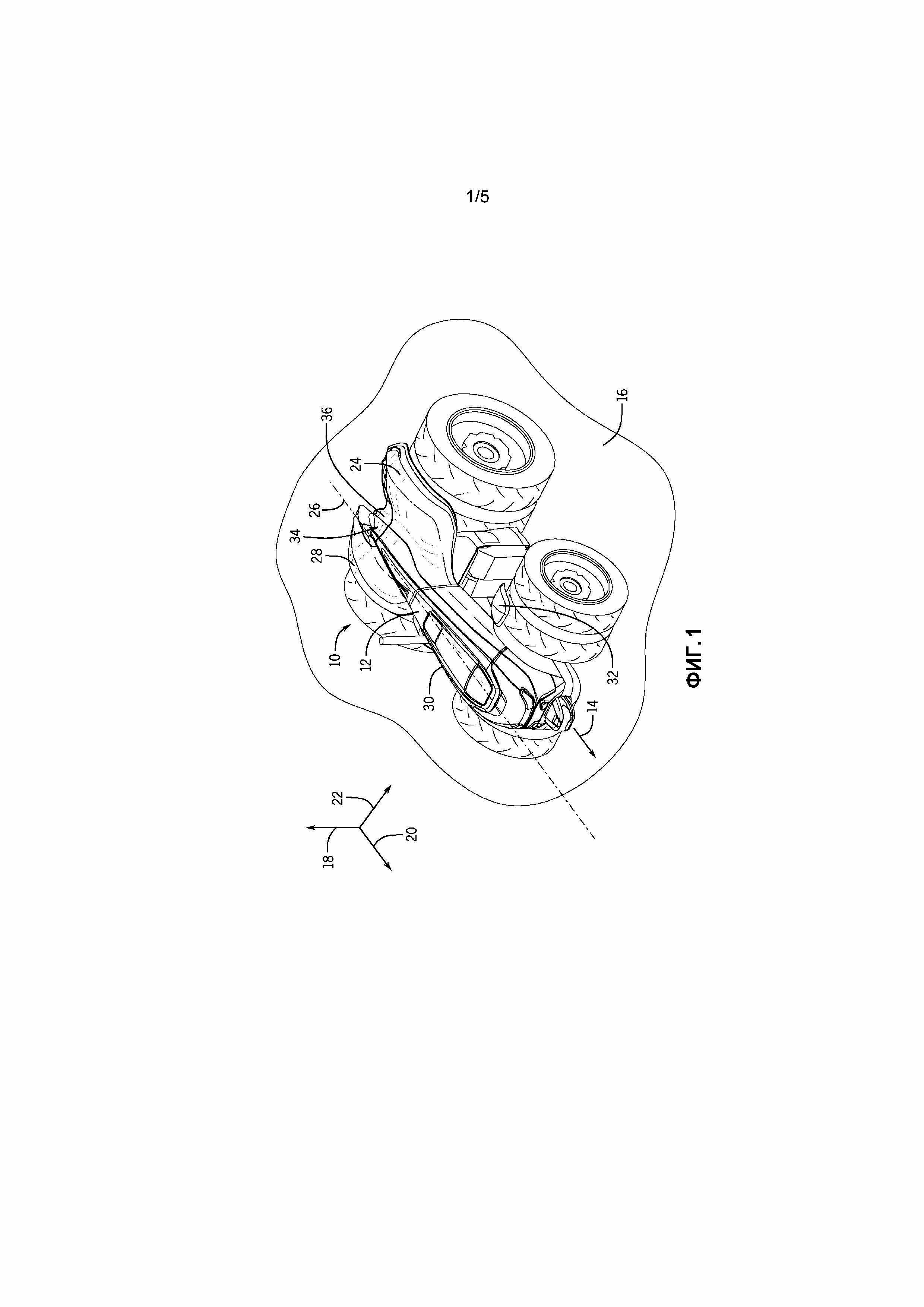
[0017] Обращаясь далее к чертежам, на фиг. 1 представлен вид в перспективе варианта осуществления рабочего транспортного средства 10, которое содержит рабочее место оператора внутри корпуса 12 транспортного средства 10. Транспортное средство 10 содержит систему управления, выполненную с возможностью автоматического (например, автономного) направления транспортного средства 10, например, по полю (например, в направлении движения 14) для облегчения работ (например, операций посадки, операций посева, операций внесения, операций обработки почвы, операций уборки и т.д.). Например, система управления может автоматически направлять транспортное средство 10 вдоль направляющей полосы по полю без ввода данных оператором. Система управления также может автоматически направлять транспортное средство 10 при поворотах по незапаханной полосе между сегментами направляющей полосы. Для облегчения управления транспортным средством 10 система управления содержит устройство определения пространственного положения, такое как приемник системы глобального позиционирования (GPS), который выполнен с возможностью подачи информации о положении в контроллер системы управления. Кроме того, транспортное средство 10 может содержать инерциальный измерительный блок (IMU) для компенсации неровного рельефа (например, посредством фильтров Калмана) и/или для корректировки положения транспортного средства для движений антенны GPS, вызываемых наклоном и креном транспортного средства. Также можно было бы рекомендовать добавление формулировки об использовании IMU при определении положения транспортного средства. Устройство определения пространственного положения выполнено с возможностью определения положения и/или ориентации автономного транспортного средства на основании сигналов пространственного положения.
[0018] Необходимо заметить, что раскрытые методы можно использовать для любого нужного типа транспортного средства, но они особенно полезны для рабочих транспортных средств. Более конкретно, один рассматриваемый в настоящее время вариант применения относится к области сельскохозяйственных работ, например, на фермах, на полях, в работах, связанных с подготовкой, культивацией, уборкой и обработкой растений и полей и так далее. Несмотря на то, что в настоящем изобретении транспортное средство 10 может называться «сельскохозяйственным транспортным средством», следует иметь в виду, что это лишь одна отдельная область применения данной технологии, и изобретение не следует понимать как ограниченное этими вариантами применения.
[0019] В проиллюстрированном варианте осуществления антенна (антенны) определения пространственного положения расположены под корпусом 12 сельскохозяйственного транспортного средства 10. Соответственно, каждая антенна определения пространственного положения расположена под верхней стороной корпуса 12 относительно поверхности 16 земли вдоль вертикальной оси 18. В некоторых вариантах осуществления верхняя сторона корпуса 12 продолжается за пределы продольного протяжения каждой антенны определения пространственного положения (например, протяжения антенны определения пространственного положения вдоль продольной оси 20) и бокового протяжения антенны определения пространственного положения (например, протяжения антенны определения пространственного положения вдоль боковой оси 22). В результате верхняя поверхность корпуса 12 полностью закрывает каждую антенну определения пространственного положения. Соответственно, корпус 12 образован из материала (например, стекловолокна, полимерного материала и т.д.), который облегчает прохождение сигнала пространственного положения (например, сигнала GPS от приблизительно 1 Гц до приблизительно 2 Гц) через корпус 12 в каждую антенну определения пространственного положения. Расположение антенны (антенн) определения пространственного положения под корпусом 12 может улучшить внешний вид сельскохозяйственного транспортного средства 10 и/или защитить антенну (антенны) определения пространственного положения от грязи/мусора на сельскохозяйственном поле.
[0020] В некоторых вариантах осуществления покрытие находится на наружной поверхности верхней стороны корпуса 12. Некоторые покрытия, такие как металлические краски и/или краски, содержащие углерод, могут мешать сигналам пространственного положения (например, по меньшей мере частично блокировать их). Соответственно, для облегчения прохождения сигналов пространственного положения через корпус 12 в каждую антенну определения пространственного положения покрытие содержит щель (щели), выровненную с соответствующей антенной (антеннами) определения пространственного положения. В некоторых вариантах осуществления для улучшения внешнего вида сельскохозяйственного транспортного средства 10 внутри щели на наружной поверхности верхней стороны корпуса 12 находится второе покрытие. Второе покрытие выполнено с возможностью облегчения прохождения сигналов пространственного положения в антенну (антенны) определения пространственного положения. Например, второе покрытие может содержать неметаллическую краску и/или краску, имеющую низкую концентрацию углерода (например, меньше чем 10 процентов, меньше чем 5 процентов, меньше чем 1 процент и т.д.). В качестве альтернативы, второе покрытие может содержать наклейку (например, виниловую наклейку), находящуюся на наружной поверхности верхней стороны корпуса 12 внутри щели.
[0021] В некоторых вариантах осуществления по меньшей мере одна антенна определения пространственного положения расположена по меньшей мере под одним крылом корпуса 12. В проиллюстрированном варианте осуществления корпус 12 содержит первое заднее крыло 24 на первой боковой стороне продольной центральной линии 26 (например, вдоль боковой оси 22) сельскохозяйственного транспортного средства 10. Корпус 12 также содержит второе заднее крыло 28 на второй боковой стороне продольной центральной линии 26 (например, вдоль боковой оси 22), расположенной напротив первой боковой стороны. Как проиллюстрировано, каждое заднее крыло расположено над соответствующим колесом, которое выполнено с возможностью сцепления с поверхностью 16 земли. Несмотря на то, что каждое заднее крыло 24 и 28 расположено над одним колесом, должно быть понятно, что в альтернативных вариантах осуществления одно или более задних крыльев можно расположить над двумя или более колесами. Кроме того, если сельскохозяйственное транспортное средство 10 содержит гусеницы, задние крылья 24 и 28 можно расположить над гусеницами. В некоторых вариантах осуществления система управления содержит первую антенну определения пространственного положения, расположенную под первым задним крылом 24, и вторую антенну определения пространственного положения, расположенную под вторым задним крылом 28. Расположение антенны определения пространственного положения под задними крыльями обеспечивает расположение каждой антенны определения пространственного положения на значительном расстоянии от продольной центральной линии 26, увеличивая посредством этого точность ориентации, определенной приемником определения пространственного положения и/или контроллером. В некоторых вариантах осуществления по меньшей мере одну антенну определения пространственного положения можно расположить под капотом 30 и/или передним крылом (крыльями) 32 сельскохозяйственного транспортного средства 10 (например, в дополнение к задним крыльям или вместо задних крыльев).
[0022] Как описано подробно ниже, сельскохозяйственное транспортное средство 10 содержит складываемое рабочее место 34 оператора, которое хранится внутри корпуса 12 под крышкой 36 сельскохозяйственного транспортного средства 10 (например, между первым задним крылом 24 и вторым задним крылом 28). В проиллюстрированном варианте осуществления крышку 36 можно прикрепить к корпусу 12 с помощью одного или более крепежных приспособлений. Как должно быть понятно, крышку 36 можно соединить с корпусом 12, используя любой подходящий способ. Например, крышка 36 может содержать выступы, которые совпадают с соответствующими пазами корпуса 12. Кроме того, крышка 36 может быть съемной, или крышка 36 может содержать шарнир.
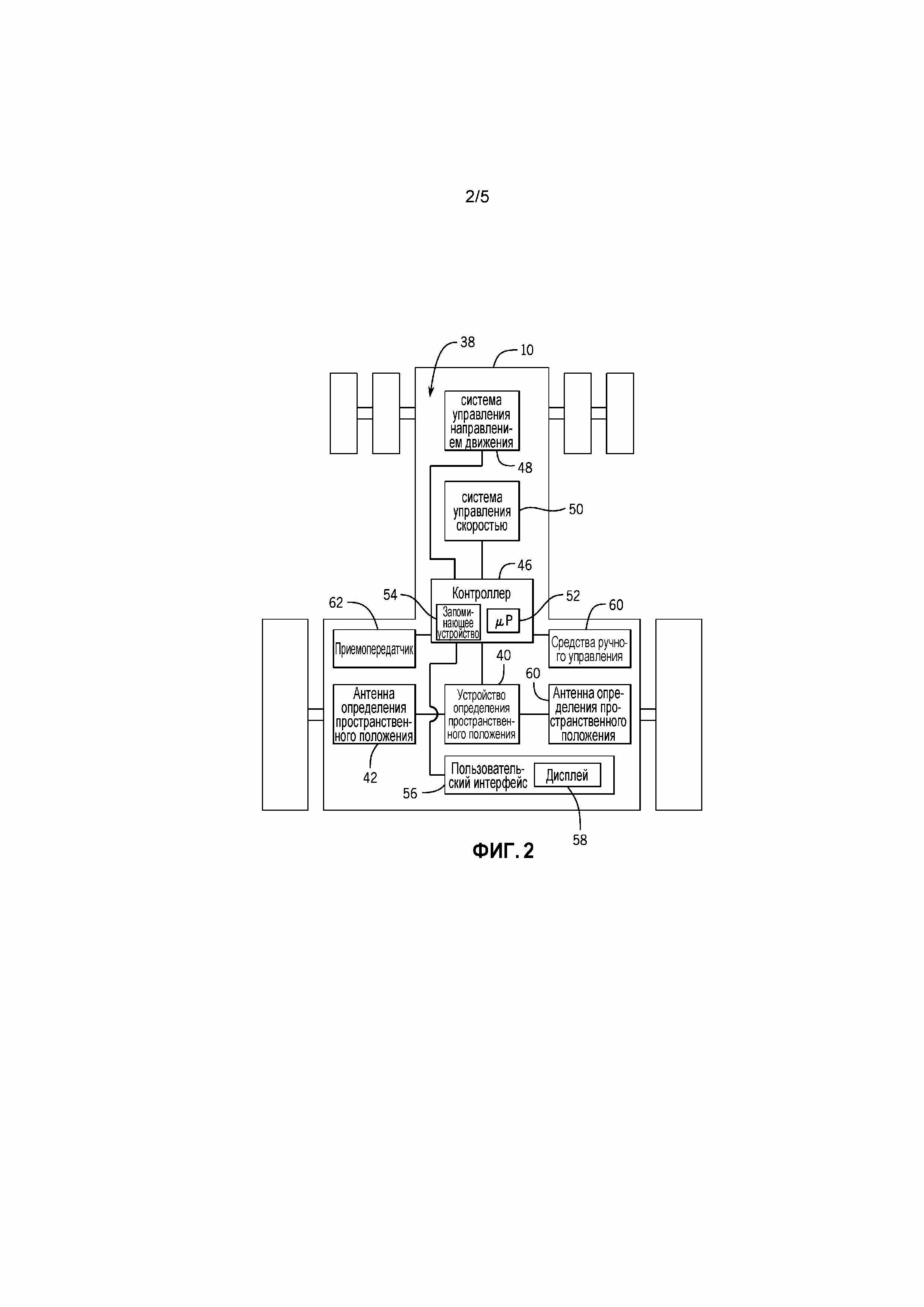
[0023] На фиг. 2 представлено схематичное изображение варианта осуществления системы 38 управления, которую можно использовать в сельскохозяйственном транспортном средстве 10 фиг. 1. В проиллюстрированном варианте осуществления система 38 управления содержит устройство 40 определения пространственного положения, которое установлено на сельскохозяйственном транспортном средстве 10 и выполнено с возможностью определения положения, а в некоторых вариантах осуществления скорости сельскохозяйственного транспортного средства 10. Как должно быть понятно, устройство 40 определения пространственного положения может содержать любую подходящую систему, выполненную с возможностью измерения и/или определения положения сельскохозяйственного транспортного средства 10, например, такую как приемник GPS.
[0024] В проиллюстрированном варианте осуществления система 38 управления также содержит первую антенну 42 определения пространственного положения и вторую антенну 44 определения пространственного положения, соединенную с возможностью обмена данными с устройством 40 определения пространственного положения. Каждая антенна определения пространственного положения выполнена с возможностью приема сигналов пространственного положения (например, сигналов GPS от спутников GPS) и передачи соответствующих данных пространственного положения в устройство 40 определения пространственного положения. Как подробно описано ниже, антенны 42 и 44 определения пространственного положения расположены на противоположных боковых сторонах продольной центральной линии. Устройство 40 определения пространственного положения выполнено с возможностью определения положения каждой антенны определения пространственного положения (например, на основании сигналов пространственного положения). Устройство 40 определения пространственного положения и/или контроллер 46 системы 38 управления выполнен с возможностью определения ориентации сельскохозяйственного транспортного средства 10 по меньшей мере частично на основании положения каждой антенны определения пространственного положения. Увеличение расстояния бокового разделения между антеннами определения пространственного положения может увеличить точность определения ориентации. Соответственно, в некоторых вариантах осуществления для увеличения расстояния бокового разделения между антеннами определения пространственного положения антенны определения пространственного положения располагают под задними крыльями сельскохозяйственного транспортного средства 10. Несмотря на то, что проиллюстрированная система 38 управления содержит две антенны определения пространственного положения, должно быть понятно, что в альтернативных вариантах осуществления система управления может содержать больше или меньше антенн определения пространственного положения (например, 1, 2, 3, 4, 5, 6 или более).
[0025] В некоторых вариантах осуществления система управления также может содержать инерциальный измерительный блок (IMU), соединенный с возможностью обмена данными с контроллером и выполненный с возможностью повышения точности установленного положения и/или ориентации. Например, IMU может содержать один или более акселерометров, выполненных с возможностью подачи сигнала (сигналов), показывающего ускорение вдоль продольной оси, боковой оси, вертикальной оси или их комбинацию. Кроме того, IMU может содержать один или более гироскопов, выполненных с возможностью подачи сигнала (сигналов), показывающего вращение (например, угол вращения, скорость вращения, угловое ускорение и т.д.) вокруг продольной оси, боковой оси, вертикальной оси или их комбинацию. Для облегчения определения положения (например, пока препятствие, такое как дерево или здание, блокирует попадание сигналов пространственного положения в антенны определения пространственного положения) контроллер может определять положение и/или ориентацию сельскохозяйственного транспортного средства на основании IMU сигнала (сигналов), пока сигналы пространственного положения, принимаемые антеннами определения пространственного положения, являются неудовлетворительными. Кроме того, контроллер может использовать IMU сигнал (сигналы) для повышения точности установленного положения и/или ориентации. Например, контроллер может объединять IMU сигнал (сигналы) с данными определения пространственного положения и/или положением, установленным устройством определения пространственного положения (например, с помощью калмановской фильтрации, подбора методом наименьших квадратов и т.д.) для определения более точного положения и/или ориентации сельскохозяйственного транспортного средства (например, путем компенсации движения антенн определения пространственного положения, обусловленного наклоном и/или креном сельскохозяйственного транспортного средства, когда сельскохозяйственное транспортное средство движется по неровному рельефу).
[0026] В некоторых вариантах осуществления IMU и устройство определения пространственного положения можно расположить внутри общего корпуса. В дополнительных вариантах осуществления внутри общего корпуса можно расположить IMU и одну антенну определения пространственного положения. Например, каждый корпус антенны определения пространственного положения может содержать антенну определения пространственного положения и IMU. Кроме того, в некоторых вариантах осуществления внутри общего корпуса можно расположить часть устройства определения пространственного положения и одну антенну определения пространственного положения. Например, внутри первого корпуса можно расположить первую часть устройства определения пространственного положения и первую антенну определения пространственного положения, а внутри второго корпуса можно расположить вторую часть устройства определения пространственного положения и вторую антенну определения пространственного положения. В некоторых вариантах осуществления внутри первого корпуса можно расположить первый IMU, а внутри второго корпуса можно расположить второй IMU.
[0027] В проиллюстрированном варианте осуществления система 38 управления содержит систему 48 рулевого управления, выполненную с возможностью управления направлением движения сельскохозяйственного транспортного средства 10, и систему 50 управления скоростью, выполненную с возможностью управления скоростью сельскохозяйственного транспортного средства 10. Кроме того, система 38 управления содержит контроллер 46, который соединен с возможностью обмена данными с устройством 40 определения пространственного положения, с системой 48 рулевого управления и с системой 50 управления скоростью. Контроллер 46 выполнен с возможностью автоматического управления сельскохозяйственным транспортным средством 10 во время определенных фаз сельскохозяйственных работ (например, без ввода оператором данных, с ограниченным вводом оператором данных и т.д.).
[0028] В некоторых вариантах осуществления контроллер 46 представляет собой электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных из устройства 40 определения пространственного положения и/или других компонентов системы 38 управления. В проиллюстрированном варианте осуществления контроллер 46 содержит процессор 52, такой как проиллюстрированный микропроцессор, и запоминающее устройство 54. Контроллер 46 также может содержать одно или более устройств хранения и/или другие подходящие компоненты. Процессор 52 можно использовать для выполнения программ, таких как программы для управления сельскохозяйственным транспортным средством 10, программы для определения ориентации транспортного средства и так далее. Кроме того, процессор 52 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какую-то их комбинацию. Например, процессор 52 может содержать один или более процессоров с сокращенным набором команд (RISC).
[0029] Запоминающее устройство 54 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ROM). Запоминающее устройство 54 может хранить много информации, и его можно использовать для различных целей. Например, запоминающее устройство 54 может хранить выполняемые процессором команды (например, прошивку или программы) для процессор 52 выполнять, такие как команды для управления сельскохозяйственным транспортным средством 10, команды для определения ориентации транспортного средства, и так далее. устройство (устройства) хранения (например, энергонезависимое запоминающее устройство) может представлять собой ROM, флеш-запоминающее устройство, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их комбинацию. В устройстве (устройствах) хранения можно хранить данные (например, данные датчиков, данные положения, данные о геометрии транспортного средства и т.д.), команды (например, программы или прошивку для управления сельскохозяйственным транспортным средством 10 и т.д.) и любые другие подходящие данные.
[0030] В некоторых вариантах осуществления система 48 рулевого управления может содержать систему регулирования угла колес, дифференциальную тормозную систему, систему векторизации крутящего момента или их комбинацию. Система регулирования угла колес может автоматически поворачивать одно или более колес и/или гусениц сельскохозяйственного транспортного средства 10 (например, посредством гидравлических исполнительных механизмов) для направления сельскохозяйственного транспортного средства 10 по требуемой траектории (например, вдоль направляющей полосы, по траектории подбора валка и т.д.). В качестве примера, система регулирования угла колес может поворачивать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы сельскохозяйственного транспортного средства 10, либо отдельно, либо в группах. Дифференциальная тормозная система может независимо изменять тормозное усилие с каждой боковой стороны сельскохозяйственного транспортного средства 10 для направления сельскохозяйственного транспортного средства 10 по траектории. Аналогично, система векторизации крутящего момента может дифференциально прикладывать крутящий момент от двигателя к колесам и/или гусеницам с каждой боковой стороны сельскохозяйственного транспортного средства 10, посредством этого направляя сельскохозяйственное транспортное средство 10 по траектории. В дополнительных вариантах осуществления система 48 рулевого управления может содержать другие и/или дополнительные системы для облегчения направления сельскохозяйственного транспортного средства 10 по траектории по полю.
[0031] В некоторых вариантах осуществления система 50 управления скоростью может содержать систему управления мощностью двигателя, систему управления силовой передачей, систему управления торможением или их комбинацию. Система управления мощностью двигателя может изменять мощность двигателя для управления скоростью сельскохозяйственного транспортного средства 10. Например, система управления мощностью двигателя может изменять настройку дроссельной заслонки двигателя, топливо-воздушную смесь двигателя, синхронизацию двигателя, другие подходящие параметры двигателя для управления мощностью двигателя или их комбинацию. Кроме того, система управления силовой передачей может регулировать коэффициент полезного действия внутри трансмиссии для управления скоростью автономного сельскохозяйственного транспортного средства 10. Кроме того, система управления торможением может регулировать тормозное усилие, посредством этого регулируя скорость автономного сельскохозяйственного транспортного средства 10. В дополнительных вариантах осуществления система управления скоростью может содержать другие и/или дополнительные системы для облегчения регулирования скорости автономного сельскохозяйственного транспортного средства 10.
[0032] В некоторых вариантах осуществления система 38 управления также может управлять работой сельскохозяйственного орудия, соединенного с автономным сельскохозяйственным транспортным средством 10. Например, система 38 управления может содержать систему управления орудием/контроллер орудия, выполненный с возможностью управления углом поворота орудия (например, посредством системы рулевого управления орудия, имеющей систему регулирования угла колес и/или дифференциальную тормозную систему) и/или скоростью автономного сельскохозяйственного транспортного средства/системы орудия (например, посредством системы управления скоростью орудия, имеющей систему управления торможением). В таких вариантах осуществления система 38 управления может быть соединена с возможностью обмена данными с системой управления/контроллером на орудии с помощью сети передачи данных, такой как локальная сеть контроллера (CAN-шина).
[0033] В проиллюстрированном варианте осуществления система 38 управления содержит пользовательский интерфейс 56, соединенный с возможностью обмена данными с контроллером 46. Пользовательский интерфейс 56 выполнен с обеспечением оператору возможности (например, стоя рядом с автономным сельскохозяйственным транспортным средством 10) управления некоторыми параметрами, связанными с работой автономного сельскохозяйственного транспортного средства 10. Например, пользовательский интерфейс 56 может содержать переключатель, который позволяет оператору конфигурировать автономное сельскохозяйственное транспортное средство 10 для автономного или ручного управления. Кроме того, пользовательский интерфейс 56 среди других органов управления может содержать переключатель выключения аккумулятора, переключатель зажигания двигателя, кнопку остановки или их комбинацию. В некоторых вариантах осуществления пользовательский интерфейс 56 содержит дисплей 58, выполненный с возможностью предоставления оператору информации, такой как графическое представление направляющей полосы, визуальное представление какого-то параметра (параметров), связанного с работой автономного сельскохозяйственного транспортного средства 10 (например, уровня топлива, давления масла, температуры воды и т.д.), визуальное представление какого-то параметра (параметров), связанного с работой орудия, соединенного с автономным сельскохозяйственным транспортным средством 10 (например, уровня семян, глубины проникновения грунтозацепных инструментов, ориентации (ориентаций)/положения (положений) некоторых компонентов орудия и т.д.) или их комбинацию, среди другой информации. В некоторых вариантах осуществления дисплей 58 может содержать интерфейс в виде сенсорного экрана, который позволяет оператору управлять некоторыми параметрами, связанными с работой автономного сельскохозяйственного транспортного средства 10 и/или орудия.
[0034] В проиллюстрированном варианте осуществления система 38 управления содержит средства 60 ручного управления, выполненные с возможностью предоставления оператору возможности управления автономным сельскохозяйственным транспортным средством 10, во время отключения автоматического управления (например, во время выгрузки автономного сельскохозяйственного транспортного средства из грузовика и т.д.). Среди других органов управления средства 60 ручного управления могут содержать средство ручного управления направлением движения, средство ручного управления трансмиссией, средство ручного управления торможением или их комбинацию. В проиллюстрированном варианте осуществления средства 60 ручного управления соединены с возможностью обмена данными с контроллером 46. Контроллер 46 выполнен с возможностью выключения автоматического управления автономным сельскохозяйственным транспортным средством 10 при получении сигнала, означающего ручное управление автономным сельскохозяйственным транспортным средством 10. Соответственно, если оператор управляет автономным сельскохозяйственным транспортным средством 10 вручную, автоматическое управление завершается, посредством этого позволяя оператору управлять автономным сельскохозяйственным транспортным средством 10.
[0035] В проиллюстрированном варианте осуществления система 38 управления содержит приемопередатчик 62, соединенный с возможностью обмена данными с контроллером 46. В некоторых вариантах осуществления приемопередатчик 62 выполнен с возможностью создания канала связи с соответствующим приемопередатчиком базовой станции, облегчая посредством этого обмен данными между базовой станцией и системой управления автономным сельскохозяйственным транспортным средством 10. Например, базовая станция может содержать пользовательский интерфейс, который позволяет удаленному оператору подавать команды в систему 38 управления (например, команды запуска автоматического управления автономным сельскохозяйственным транспортным средством, команды направления автономного сельскохозяйственного транспортного средства по траектории и т.д.). Пользовательский интерфейс также может позволять удаленному оператору подавать данные в систему управления. приемопередатчик 62 может работать в любом подходящем частотном диапазоне внутри электромагнитного спектра. Например, в некоторых вариантах осуществления приемопередатчик 62 может передавать и принимать радиоволны внутри частотного диапазона от приблизительно 1 Гц до приблизительно 10 Гц. Кроме того, приемопередатчик 62 может использовать любой подходящий протокол обмена данными, такой как стандартный протокол (например, Wi-Fi, Bluetooth и т.д.) или проприетарный протокол.
[0036] Сельскохозяйственное транспортное средство 10 может выполнять некоторые операции автономно (например, без оператора на сельскохозяйственном транспортном средстве) или частично автономно (например, с командами от оператора, удаленного от сельскохозяйственного транспортного средства, с командами от системы управления и т.д.) более эффективно, чем оператор. Кроме того, постоянная кабина может занимать в автономном транспортном средстве 10 значительное пространство, что оператору для некоторых операций может быть не нужно. Кроме того, оператор может выполнять некоторые операции более эффективно, чем система 38 управления. Например, среди прочего оператор может быть более эффективным при соединении орудия, погрузке сельскохозяйственного транспортного средства на грузовик, или конкретное орудие не может настроено для автономной работы. В связи с этим может быть желательно иметь рабочее место оператора, которое уменьшает или устраняет вмешательство в автономные работы, а также уменьшает пространство, используемое пока сельскохозяйственное транспортное средство 10 работает автономно или частично автономно, но обеспечивает оператору средства ручного управления, когда сельскохозяйственным транспортным средством 10 управляет оператор.
[0037] В некоторых вариантах осуществления система управления может содержать другие и/или дополнительные контроллеры/системы управления, такие как контроллер/система управления орудием, описанные выше. Например, контроллер/систему управления орудием можно выполнить с возможностью управления различными параметрами сельскохозяйственного орудия, буксируемого сельскохозяйственным транспортным средством. В некоторых вариантах осуществления контроллер/систему управления орудием можно выполнить с возможностью подачи исполнительному механизму (механизмам) команды регулирования глубины проникновения по меньшей мере одного грунтозацепного инструмента сельскохозяйственного орудия. В качестве примера контроллер/система управления орудием может подавать исполнительному механизму (механизмам) команду уменьшения или увеличения глубины проникновения в каждой точке обработки почвы на почвообрабатывающем орудии, или контроллер/система управления орудием может подавать исполнительному механизму (механизмам) команду сцепления или расцепления с почвой каждого диска/ножа сошника посевного/посадочного орудие. Кроме того, контроллер/система управления орудием среди других операций может подавать исполнительному механизму (механизмам) команду перевода сельскохозяйственного орудия между рабочим положением и транспортировочным положением для регулирования скорости прохождения продукта из сельскохозяйственного орудия или для регулирования положения жатки сельскохозяйственного орудия (например, уборочной машины и т.д.). Система управления сельскохозяйственным транспортным средством среди других контроллеров/систем управления также может содержать контроллер (контроллеры)/систему (системы) управления для электрогидравлического удаленного узла (узлов), вала (валов) отбора мощности, регулируемой сцепки (сцепок) или их комбинации.
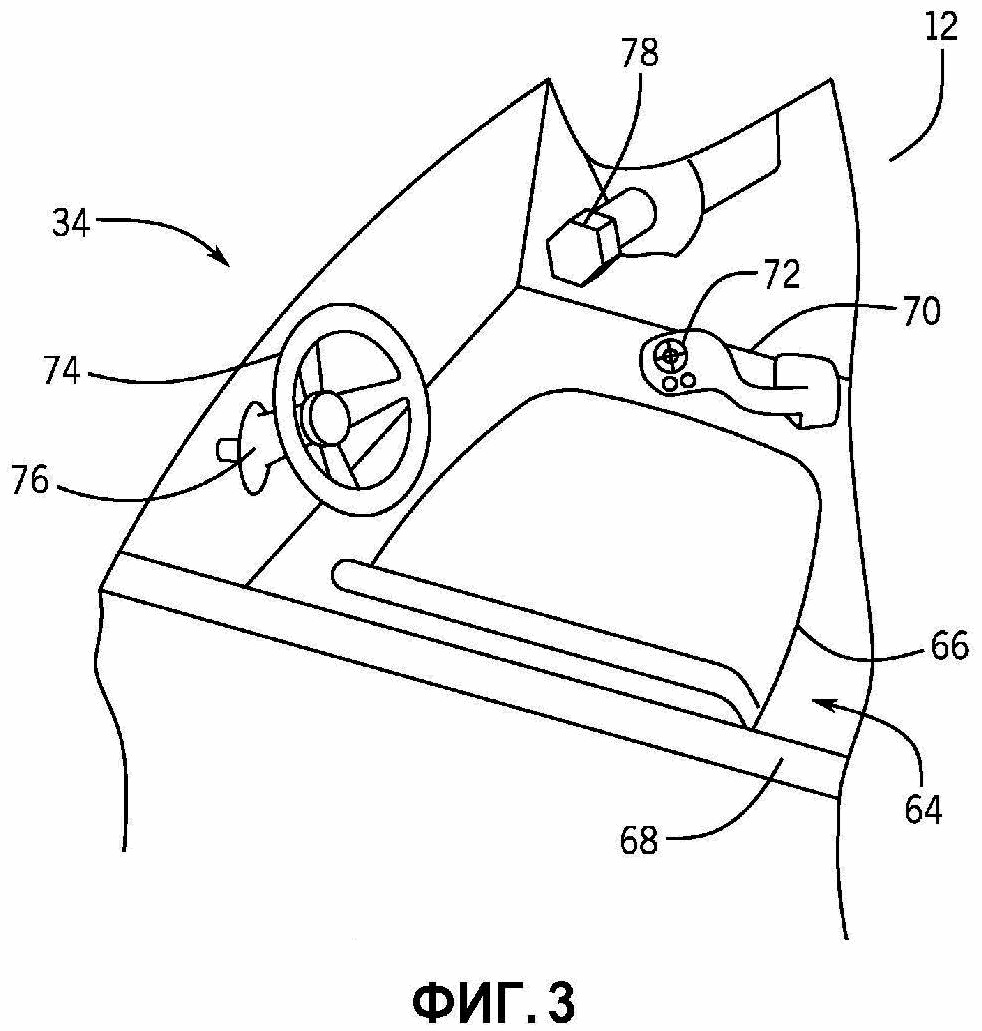
[0038] На фиг. 3 представлен вид в перспективе сельскохозяйственного транспортного средства 10 со снятой крышкой 36 фиг. 1 с деталями рабочего места 34 оператора в сложенных положениях (например, внутри корпуса сельскохозяйственного транспортного средства 10). Рабочее место 34 оператора может содержать отверстие для рабочего места 34 оператора, которое совпадает с контуром крышки 36, предназначенной для закрывания пока сельскохозяйственное транспортное средство работает автономно или частично автономно. Кроме того, одну или более частей рабочего места 34 оператора можно разложить (например, с продолжением за пределы контура, где должна располагаться крышка 36, если крышку 36 не сняли). Например, рабочее место 34 оператора содержит систему 64 раскладываемого сиденья, имеющую раскладываемое сиденье 66 в сложенном положении (например, опущенном положении), чтобы позволить крышке закрыть (например, спрятать) рабочее место 34 оператора внутри корпуса 12 сельскохозяйственного транспортного средства. То есть, раскладываемое сиденье 66 можно расположить внутри части конструкции 68 сельскохозяйственного транспортного средства. Рабочее место 34 оператора содержит ручку 70 управления, имеющую одно или более средств 72 управления для управления работой сельскохозяйственного транспортного средства. Ручка 70 управления может иметь средство 72 управления, которое управляет одним или более электрогидравлическими клапанами сельскохозяйственного транспортного средства. Кроме того, ручку 70 управления можно выполнить с возможностью складывания на чашу сиденья в сложенном положении (например, опущенном и/или параллельном поверхности 16 земли), чтобы обеспечить промежуток, позволяющий закрывать крышкой рабочее место 34 оператора и уменьшать пространство, используемое для рабочего места 34 оператора.
[0039] В проиллюстрированном варианте осуществления рабочее место 34 оператора содержит рулевое колесо 74, установленное в крепление 76 в сложенном положении (например, в опущенном положении), которое закрепляет рулевое колесо 76 внутри рабочего места 34 оператора, обеспечивая промежуток, позволяющий закрывать крышкой 36 рабочее место 34 оператора (например, пока сельскохозяйственное транспортное средство работает автономно). То есть, рулевое колесо 74 можно устанавливать в крепление 76 в сложенном положении (например, более низком, чем положение рулевого управления), уменьшая пространство, используемое для рабочего места 34 оператора. В связи с этим раскладываемое сиденье 66, ручка 70 управления и рулевое колесо 74 показаны в сложенном положении, позволяющем закрывать крышкой 36 рабочее место 34 оператора для уменьшения пространства, используемого для рабочего места 34 оператора, уменьшая за счет этого или устраняя вмешательство в автономные работы. При раскладывании деталей рабочего места 34 оператора, чтобы обеспечить ручное управление, оператор может установить рулевое колесо 74 в опору 78 рулевого колеса. Несмотря на то, что в проиллюстрированном варианте осуществления содержатся некоторые детали рабочего места 34 оператора, рабочее место 34 оператора может содержать любые подходящие детали (например, педали, средства ручного управления и т.д.), обеспечивающие оператору возможность ручного управления сельскохозяйственным транспортным средством.
[0040] На фиг. 4 представлен вид в перспективе сельскохозяйственного транспортного средства с крышкой фиг. 1, снятой с корпуса 12 с деталями рабочего места 34 оператора в положениях для ручного управления. Раскладываемое сиденье 66 можно передвинуть из сложенного положения внутри части конструкции 68 сельскохозяйственного транспортного средства в положение для ручного управления в конструкции 68 сельскохозяйственного транспортного средства, обеспечивая оператору пространство, чтобы сидеть на раскладываемом сиденье 66 для приведения в действие сельскохозяйственного транспортного средства. В проиллюстрированном варианте осуществления рулевое колесо 74 снято с крепления 76 и установлено на опору рулевого колеса в положении для ручного управления, позволяющем оператору управлять сельскохозяйственным транспортным средством. Кроме того, ручку 70 управления можно поворачивать относительно сельскохозяйственного транспортного средства в положение для ручного управления (например, по существу вертикально относительно поверхности земли) для расположения средства 72 ручного управления таким образом, чтобы оператор мог управлять сельскохозяйственным транспортным средством.
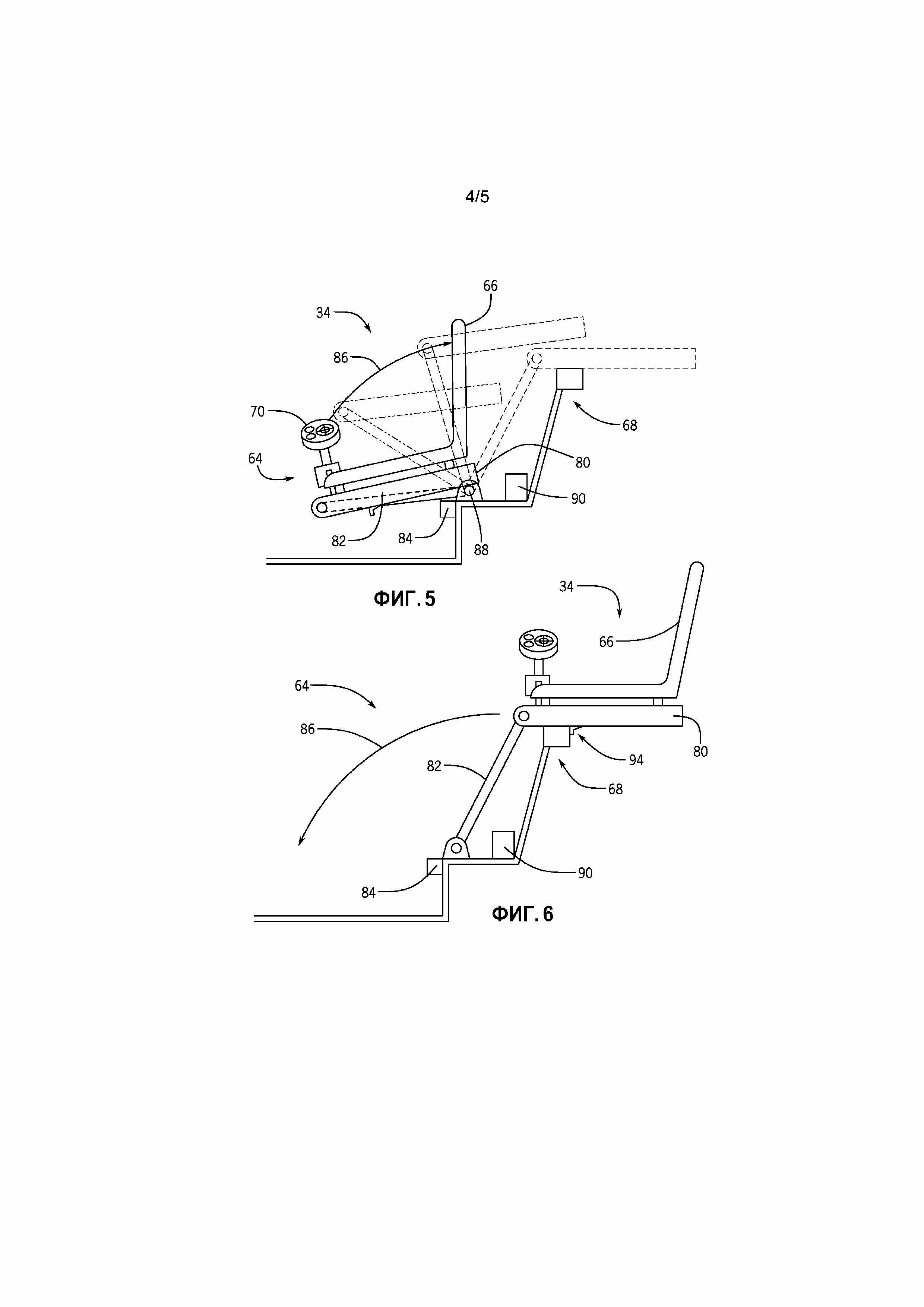
[0041] На фиг. 5 представлен вид сбоку рабочего места 34 оператора с системой 64 раскладываемого сиденья в сложенном положении (например, в опущенном положении), в котором первый рычаг 80 и второй рычаг 82 сложены друг относительно друга. Рычаг может быть изготовлен из стали или из любого другого подходящего материала. Первый рычаг 80 и второй рычаг 82 сложены на стопорный кронштейн 84 сложенного положения, который закрепляет раскладываемое сиденье 66 на своем месте во время выполнения автономных работ. Кроме того, в некоторых вариантах осуществления ручку 70 управления можно расположить на системе 64 раскладываемого сиденья (например, на первом рычаге 80) для передвижения ручки 70 управления в такое положение, чтобы оператор мог управлять сельскохозяйственным транспортным средством.
[0042] В проиллюстрированном варианте осуществления раскладываемое сиденье 66 раскладывают из сложенного положения в положение для ручного управления, в котором раскладываемое сиденье 66 разложено для оператора. Для передвижения раскладываемого сиденья 66 из сложенного положения в положение для ручного управления раскладываемое сиденье 66 двигают по дуге 86 вокруг шарнира 88 таким образом, чтобы предотвратить контакт раскладываемого сиденья 66 со схемой 90, находящейся внутри рабочего места 34 оператора. То есть, раскладываемое сиденье 66 можно складывать внутри конструкции 68 корпуса 12 сельскохозяйственного транспортного средства во время по меньшей мере частично автономного управления сельскохозяйственным транспортным средством. Кроме того, раскладываемое сиденье 66 раскладывают по меньшей мере частично за пределы конструкции 68 корпуса 12 сельскохозяйственного транспортного средства, предоставляя оператору возможность управления сельскохозяйственным транспортным средством с развернутого сиденья 66.
[0043] На фиг. 6 представлен вид сбоку рабочего места 34 оператора с системой 64 раскладываемого сиденья в положении для ручного управления на части конструкции 68 сельскохозяйственного транспортного средства. Система 64 раскладываемого сиденья содержит первый рычаг 80, проходящий на фиксирующий положение язычок 94, для закрепления раскладываемого сиденья 66, пока оператор вручную управляет сельскохозяйственным транспортным средством. Второй рычаг 82 высвобождают из стопорного кронштейна 84 сложенного положения и поворачивают между шарниром 88 и первым рычагом 80. Рабочее место 34 оператора может двигаться по дуге 86 вокруг шарнира 88 с расположением раскладываемого сиденья 66 в сложенном положении таким образом, чтобы предотвратить контакт раскладываемого сиденья 66 со схемой 90, находящейся внутри рабочего места 34 оператора.
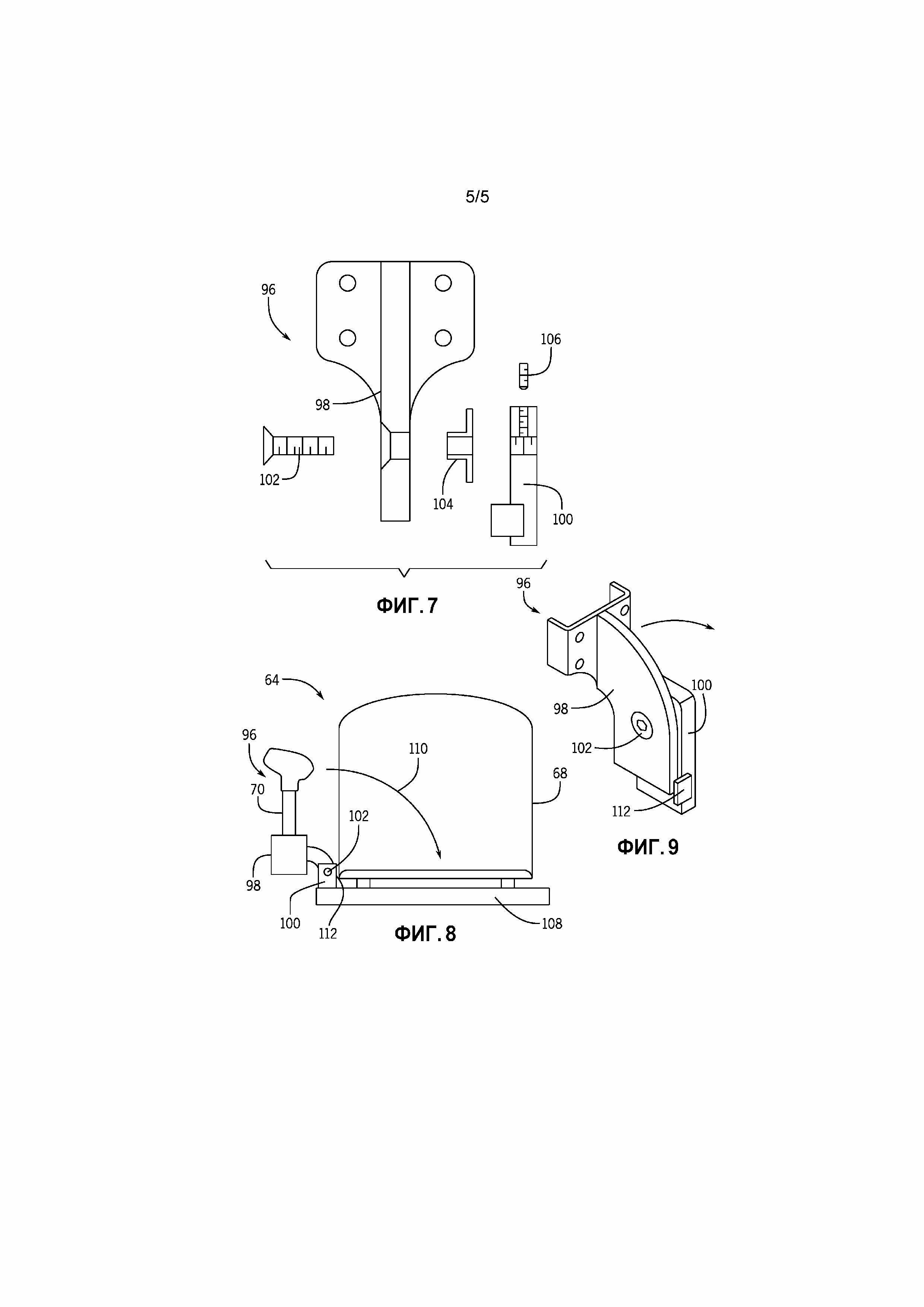
[0044] На фиг. 7 представлен вид спереди в разобранном виде системы 96 ручки управления рабочего места оператора, имеющей кронштейн 98 ручки, который можно использовать для поддержки ручки управления фиг. 3. Ручку управления можно прикрепить к основанию 100 с помощью крепежного приспособления 102 (например, болта) и втулки 104. Крепежное приспособление 102 и втулку 104 можно прикрепить с помощью установочного винта 106.
[0045] На фиг. 8 представлен вид спереди системы 64 раскладываемого сиденья, имеющей систему 96 ручки управления, прикрепленной к основанию 108 системы 64 раскладываемого сиденья. В проиллюстрированном варианте осуществления ручка 70 управления находится в положении для ручного управления, предоставляющем оператору возможность управления сельскохозяйственным транспортным средством. Для помещения в сложенное положение ручку 70 управления можно повернуть вокруг оси 110 вдоль крепежного приспособления 102. Кроме того, основание 100 может содержать стопорный язычок 112 для блокировки ручки 70 управления, пока ручка управления находится в сложенном положении.
[0046] На фиг. 9 представлен вид в перспективе варианта осуществления системы ручки рабочего места оператора фиг. 1. В варианте осуществления стопорный язычок 112 блокирует систему 96 ручки, когда кронштейн 98 ручки поворачивают вокруг крепежного приспособления 102.
[0047] При том, что в данном документе были проиллюстрированы и описаны лишь некоторые признаки, специалистами в данной области будет предусмотрено множество модификаций и изменений. Вследствие этого, следует понимать, что прилагаемая формула изобретения подразумевает охват всех таких модификаций и изменений, которые находятся в пределах истинной сущности изобретения.
Почвообрабатывающее орудие со стопором для упругой опоры
Регулируемые исполнительным механизмом прикатывающие катки
Крепежное приспособление с конфигурацией двойного среза для элементов рамы сельскохозяйственного почвообрабатывающего орудия
Почвообрабатывающее орудие с предварительно установленным углом рамы с дисками
Система и способ работы полотенной жатки во время и после операции очистки пробки
Низкопрофильный привод режущего аппарата поворотного действия
Легко обслуживаемый узел рычага ножа для режущего аппарата
Легко обслуживаемый и съемный саморегулируемый узел рычага и головки ножа для режущего аппарата
Уборочная машина с системой очистки, имеющей ранний выпуск чистого зерна
Низкопрофильный привод режущего аппарата
Адаптируемая библиотека оборудования для программного обеспечения подачи команд и управления

