Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ, КОМПЬЮТЕРНАЯ ПРОГРАММА И НОСИТЕЛЬ ДАННЫХ
Вид РИД
Изобретение
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к области технологий мобильной связи и более конкретно к способу и устройству передачи данных, компьютерной программе и носителю данных.
Предшествующий уровень техники настоящего изобретения
После нескольких лет развития версий технологий беспроводной связи и под влиянием требований пользователей технологии беспроводной связи постепенно эволюционировали от самой ранней 2G (второе поколение) через 3G и 4G до последней 5G. Основные улучшения в 5G сделаны в таких аспектах, как скорость передачи данных, покрытие, задержка и пропускная способность.
После вступления в эру 5G важно удовлетворить требование предоставления гибких конфигураций услуг для различных услуг, включающих в себя широкополосное соединение, Интернет вещей, Интернет транспортных средств, глобальное покрытие и т.п. К текущим типам услуг 5G относится множество разнообразных типов, таких как улучшенный мобильный широкополосный доступ (еМВВ), массовая передача данных между интеллектуальными устройствами (mMTC) и сверхнадежная связь с малой задержкой (URLLC).
Для услуги URLLC сверхмалая задержка является целью проектирования системы. Это требует от системы выделения пользователю относительно широкой полосы пропускания для осуществления передачи в течение максимально короткого периода времени, а также возврата обратной связи в виде подтверждения (АСК)/ отрицательного подтверждения (NACK) в течение кратчайшего периода времени.
Краткое раскрытие настоящего изобретения
Для решения проблем, присущих предшествующему уровню техники, настоящее изобретение предоставляет способ и устройство передачи данных, компьютерную программу и носитель данных, описание которых приведено ниже.
В соответствии с первым аспектом вариантов осуществления настоящего изобретения предоставляется способ передачи данных. Указанный способ предусматривает: определение конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра дуплексной связи с временным разделением (TDD), причем гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, сконфигурированы поочередно; доставку определенной конфигурационной информации по меньшей мере одного гибкого подкадра в оборудование пользователя (UE) с использованием сигнализации; и в соответствии с определенной конфигурационной информацией по меньшей мере одного гибкого подкадра прием восходящих данных во временном интервале символа передачи в восходящем направлении, а также отправку нисходящих данных во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления гибкий подкадр может быть сконфигурирован таким образом, чтобы дополнительно включать в себя контрольный период (GP). GP может быть расположен между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления GP может быть сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении. Альтернативно, GP может быть сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления определение конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, может включать в себя: определение для каждого гибкого подкадра местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в восходящем направлении, и местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в нисходящем направлении; и, если гибкий подкадр сконфигурирован таким образом, чтобы включать в себя GP, определение местоположения и продолжительности временного подынтервала, занимаемого GP.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя динамически сконфигурированный гибкий подкадр. Определение конфигурационной информации динамически сконфигурированного гибкого подкадра может включать в себя: периодическое определение местоположения, информации о заполнении и продолжительности каждого временного подынтервала в динамически сконфигурированном гибком подкадре.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр может включать в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Определение конфигурационной информации полудинамически сконфигурированного гибкого подкадра может включать в себя: с первой предварительно определенной периодичностью определение местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре; и со второй предварительно определенной периодичностью определение местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре. Первая предварительно определенная периодичность может превышать вторую предварительно определенную периодичность.
Согласно одному варианту осуществления сигнализация может включать в себя: широковещательную сигнализацию, сигнализацию управления радиоресурсами (RRC) и сигнализацию физического уровня.
В соответствии со вторым аспектом вариантов осуществления настоящего изобретения предоставляется другой способ передачи данных. Указанный способ предусматривает: прием от базовой станции конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, при этом гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, сконфигурированы поочередно; и в соответствии с конфигурационной информацией по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, отправку восходящих данных во временном интервале символа передачи в восходящем направлении, а также прием нисходящих данных во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления гибкий подкадр может быть сконфигурирован таким образом, чтобы дополнительно включать в себя GP. GP может быть расположен между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления GP может быть сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении. Альтернативно, GP может быть сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя по меньшей мере один динамически сконфигурированный гибкий подкадр. Прием конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, от базовой станции может включать в себя: периодический прием от базовой станции информации о структуре по меньшей мере одного динамически сконфигурированного гибкого подкадра в радиокадре TDD. Местоположение, информация о заполнении и продолжительность каждого временного подынтервала в динамически сконфигурированном гибком подкадре являются периодически и динамически сконфигурированными.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя по меньшей мере один полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр может включать в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Прием конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, от базовой станции может включать в себя: с первой предварительно определенной периодичностью прием от базовой станции конфигурационной информации относительно местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре; и со второй предварительно определенной периодичностью прием от базовой станции конфигурационной информации относительно местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре. Первая предварительно определенная периодичность может превышать вторую предварительно определенную периодичность.
В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предоставляется устройство передачи данных. Устройство содержит: модуль определения, выполненный с возможностью определения конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, при этом гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении сконфигурированы поочередно; модуль отправки, выполненный с возможностью доставки определенной конфигурационной информации по меньшей мере одного гибкого подкадра в UE с использованием сигнализации; и модуль передачи, выполненный с возможностью, в соответствии с определенной конфигурационной информацией по меньшей мере одного гибкого подкадра, приема восходящих данных во временном интервале символа передачи в восходящем направлении и отправки нисходящих данных во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления модуль определения может включать в себя: первый подмодуль определения, выполненный с возможностью определения конфигурационной информации GP в гибком подкадре. GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления первый подмодуль определения может быть выполнен с возможностью определения того, что GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении; или что GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления модуль определения может дополнительно включать в себя: второй подмодуль определения. Второй подмодуль определения выполнен с возможностью: определения для каждого гибкого подкадра местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в восходящем направлении, а также местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в нисходящем направлении. Первый подмодуль определения выполнен с возможностью: определения местоположения и продолжительности временного подынтервала, занимаемого GP, когда гибкий подкадр сконфигурирован таким образом, чтобы дополнительно включать в себя GP.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя динамически сконфигурированный гибкий подкадр. Модуль определения выполнен с возможностью периодического определения местоположения, информации о заполнении и продолжительности каждого временного подынтервала в динамически сконфигурированном гибком подкадре.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр может включать в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Модуль определения может быть выполнен с возможностью: с первой предварительно определенной периодичностью определять местоположение, информацию о заполнении и продолжительность каждого жестко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре; и со второй предварительно определенной периодичностью определять местоположение, информацию о заполнении и продолжительность каждого гибко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре. Первая предварительно определенная периодичность может превышать вторую предварительно определенную периодичность.
Согласно одному варианту осуществления сигнализация может включать в себя: широковещательную сигнализацию, сигнализацию RRC и сигнализацию физического уровня.
В соответствии с четвертым аспектом варианта осуществления настоящего изобретения предоставляется еще одно устройство передачи данных. Устройство содержит: модуль приема, выполненный с возможностью принимать от базовой станции конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, при этом гибкий подкадр сконфигурирован таким образом, чтобы содержать по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, сконфигурированы поочередно; и модуль передачи, выполненный с возможностью, в соответствии с конфигурационной информацией по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, отправки восходящих данных во временном интервале символа передачи в восходящем направлении и приема нисходящих данных во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления модуль приема может быть выполнен с возможностью приема конфигурационной информации GP в гибком подкадре, при этом GP может быть расположен между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления модуль приема может быть дополнительно выполнен с возможностью приема конфигурационной информации GP в гибком подкадре, указывающей на одной из следующего: GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении; или GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя по меньшей мере один динамически сконфигурированный гибкий подкадр. Модуль приема может быть выполнен с возможностью периодического приема от базовой станции информации о структуре по меньшей мере одного динамически сконфигурированного гибкого подкадра в радиокадре TDD. Местоположение, информация о заполнении и продолжительность каждого временного подынтервала в динамически сконфигурированном гибком подкадре могут быть периодически и динамически сконфигурированы.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя по меньшей мере один полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр может включать в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Модуль приема может быть выполнен с возможностью: с первой предварительно определенной периодичностью принимать от базовой станции конфигурационную информацию относительно местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре; и со второй предварительно определенной периодичностью принимать от базовой станции конфигурационную информацию относительно местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре. Первая предварительно определенная периодичность может превышать вторую предварительно определенную периодичность.
В соответствии с пятым аспектом варианта осуществления настоящего изобретения предоставляется устройство передачи данных. Устройство содержит: процессор; и запоминающее устройство, выполненное с возможностью хранения команд, выполняемых процессором. Процессор выполнен с возможностью осуществления способа передачи данных, предоставленного согласно первому аспекту.
В соответствии с шестым аспектом варианта осуществления настоящего изобретения предоставляется носитель данных, характеризующийся наличием записанной на нем компьютерной программы. Программа содержит команды для осуществления способа передачи данных согласно первому аспекту варианта осуществления настоящего изобретения.
В соответствии с седьмым аспектом варианта осуществления настоящего изобретения предоставляется компьютерная программа. Программа содержит команды для осуществления способа передачи данных согласно первому аспекту варианта осуществления настоящего изобретения, когда указанная компьютерная программа выполняется на компьютере.
В соответствии с восьмым аспектом варианта осуществления настоящего изобретения предоставляется устройство передачи данных. Устройство содержит: процессор; и запоминающее устройство, выполненное с возможностью хранения команд, выполняемых процессором. Процессор выполнен с возможностью осуществления способа передачи данных, предоставленного согласно второму аспекту.
В соответствии с девятым аспектом варианта осуществления настоящего изобретения предоставляется носитель данных, характеризующийся наличием записанной на нем компьютерной программы. Программа содержит команды для осуществления способа передачи данных согласно второму аспекту варианта осуществления настоящего изобретения.
В соответствии с десятым аспектом варианта осуществления настоящего изобретения предоставляется компьютерная программа. Программа содержит команды для осуществления способа передачи данных согласно второму аспекту варианта осуществления настоящего изобретения, когда указанная компьютерная программа выполняется на компьютере.
Техническим решениям, предоставляемым согласно указанным вариантам осуществления настоящего изобретения, могут быть присущи следующие преимущественные эффекты.
При помощи способа и устройства передачи данных, компьютерной программы и носителя данных, предоставляемых согласно вариантам осуществления настоящего изобретения, вначале определяют конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, где гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы; затем отправляют определенную конфигурационную информацию по меньшей мере одного подкадра в UE при помощи сигнализации; и затем передают восходящие данные и нисходящие данные в соответствии с конфигурационной информацией гибкого подкадра. В отличие от решения конфигурации подкадров радиокадра TDD в известном уровне техники, где один подкадр (подкадр в восходящем направлении или подкадр в нисходящем направлении) содержит только один тип символов передачи (подкадр в восходящем направлении содержит только символ передачи в восходящем направлении, а подкадр в нисходящем направлении содержит только символ передачи в нисходящем направлении), конфигурирование символов передачи в восходящем направлении и нисходящем направлении может быть может реализовано в одном подкадре, в результате чего может быть быстро осуществлена обратная связь в виде сообщения-подтверждения, такого как АСК/ NACK, от UE, а также желаемо снижена задержка передачи.
Согласно этому варианту осуществления настоящего изобретения GP сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении; или GP сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении. Следовательно, GP может быть установлен очень гибко. Более того, с одной стороны, установка GP, который располагается при переходе от нисходящего направления к восходящему направлению, служит для предотвращения возникновения помех для восходящего сигнала со стороны нисходящего сигнала; с другой стороны, при наличии множества UE присутствие GP может обеспечивать синхронизацию между различными UE, что устраняет блокировку во время передачи данных, а также улучшает эффективность передачи данных.
Согласно другому аспекту в способе передачи данных, предоставленном в вариантах осуществления настоящего изобретения, гибкий подкадр может быть сконфигурирован полностью динамически или сконфигурирован полудинамически, так что конфигурирование подкадра TDD становится более гибким, и реконфигурация может быть выполнена в соответствии с таким факторами, как тип услуги, покрытие сети, пропускная способность сети и помехи в сети, что полностью удовлетворяет требование услуги TDD с асимметричными потоками данных в восходящем и нисходящем направлениях.
Более того, по сравнению с динамически сконфигурированным гибким подкадром структура полудинамически сконфигурированного гибкого подкадра может способствовать сохранению заголовков сигнализации управления во время передачи данных, а также способствовать определению того, какие символы могут создавать помехи при подавлении помех.
Следует понимать, что вышеизложенное общее раскрытие и последующее подробное раскрытие являются лишь иллюстративными и не должны быть причиной какого-либо ограничения настоящего изобретения.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в настоящее описание, составляя его часть, иллюстрируют варианты осуществления, согласующиеся с настоящим изобретением, и совместно с описанием служат для пояснения принципов настоящего изобретения.
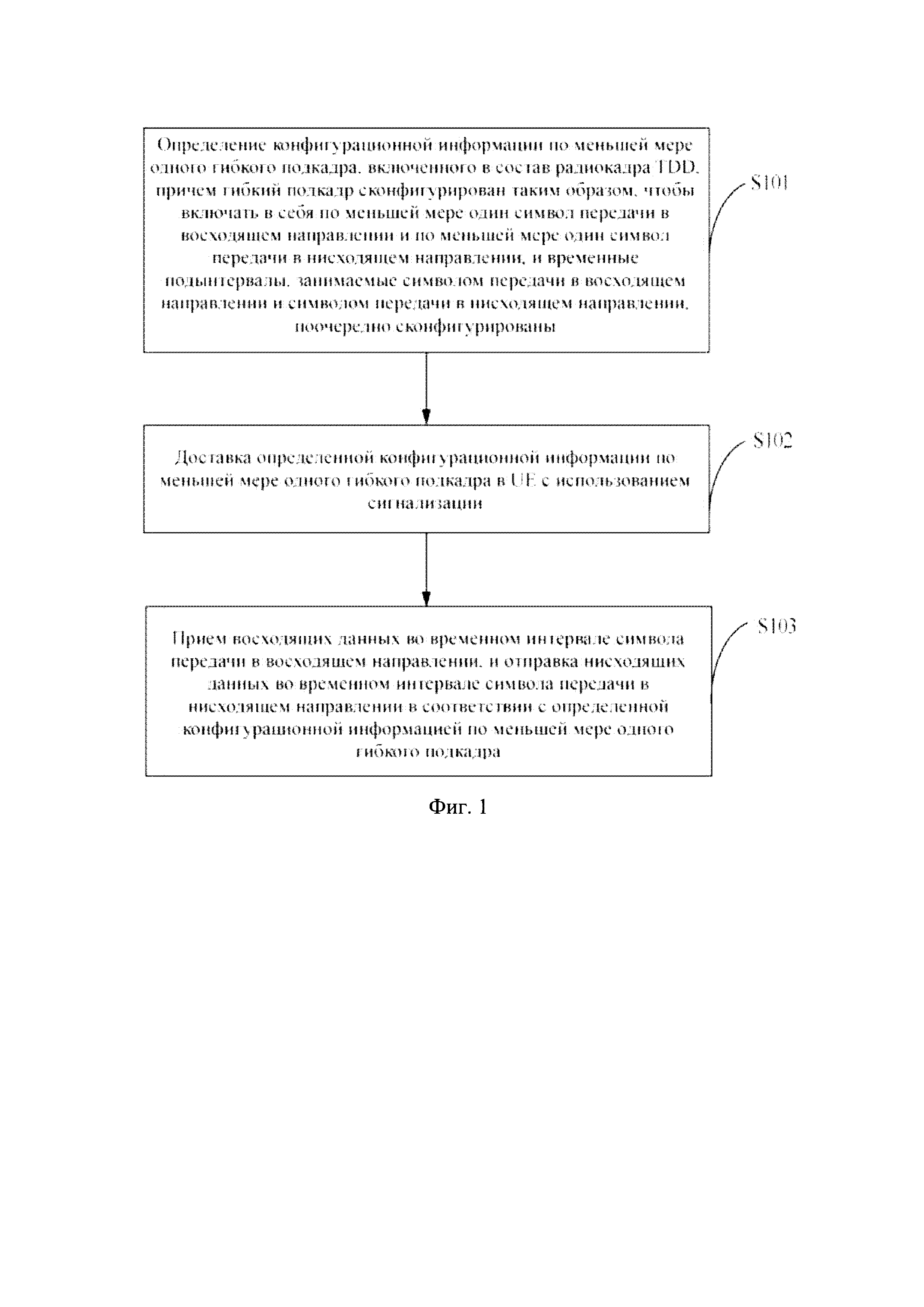
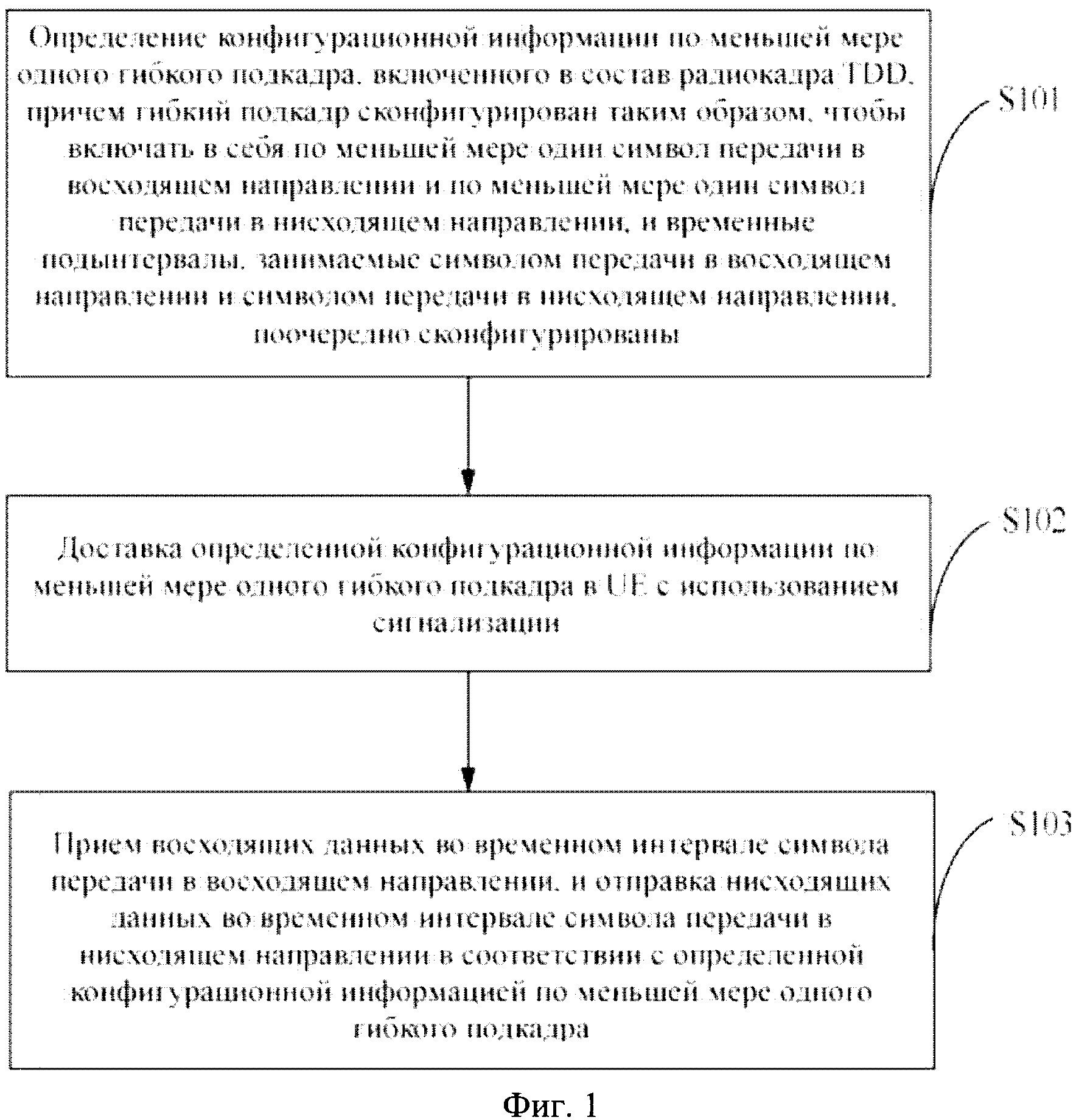
На фиг. 1 представлена функциональная схема способа передачи данных в соответствии с иллюстративным вариантом осуществления.
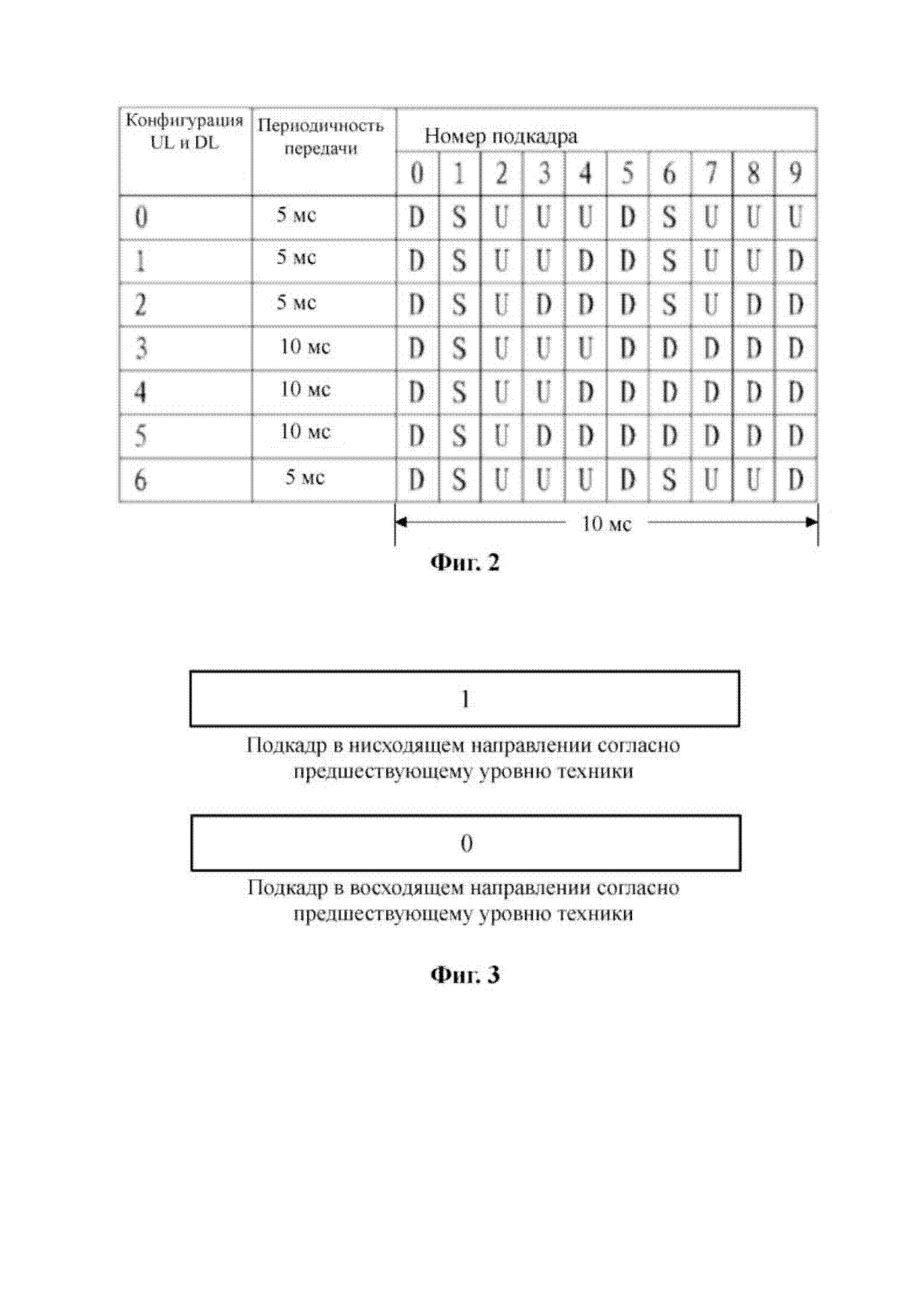
На фиг. 2 представлена принципиальная схема радиокадра TDD согласно предшествующему уровню техники.
На фиг. 3 представлена принципиальная схема двух стандартных подкадров в радиокадре TDD согласно предшествующему уровню техники.
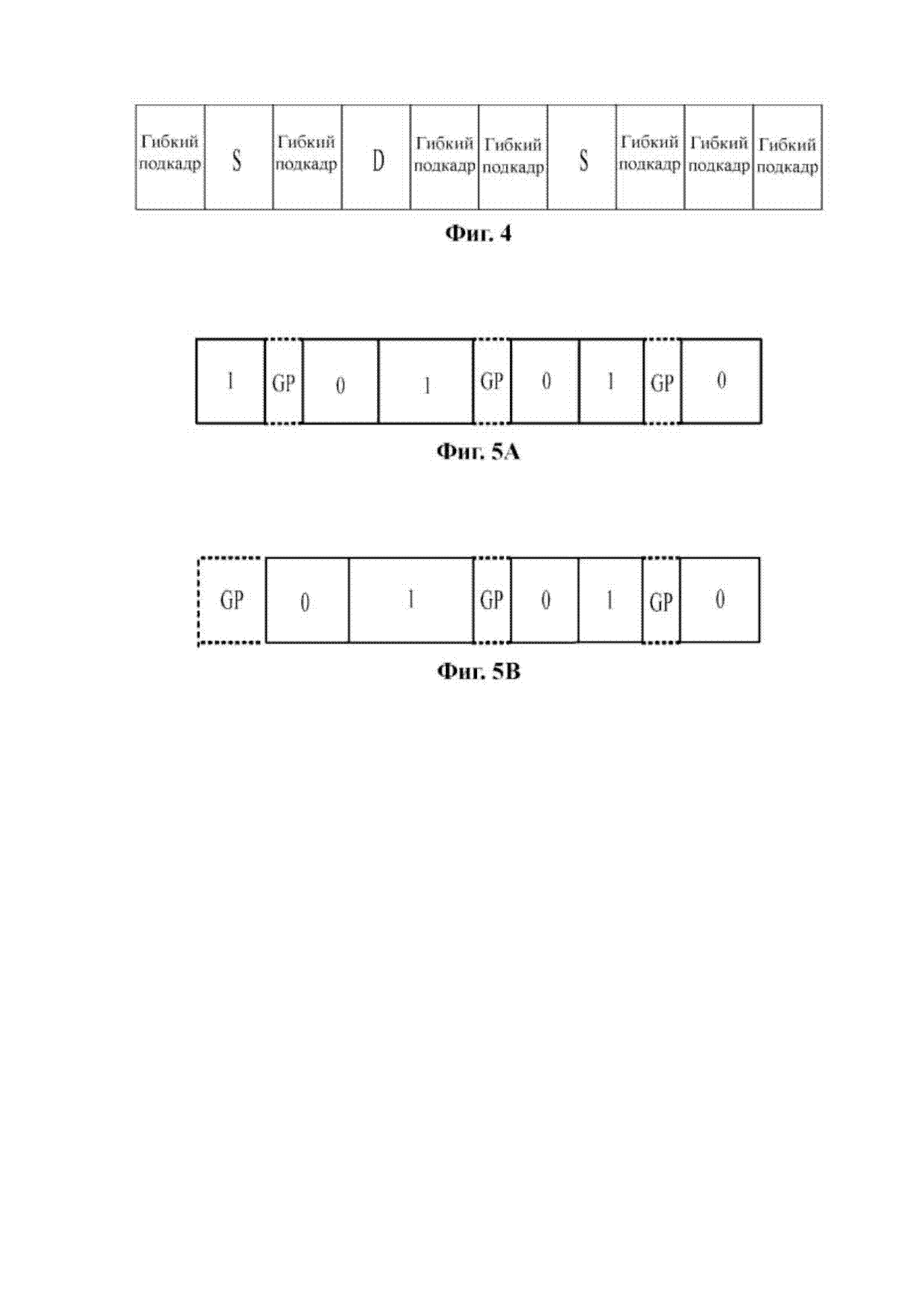
На фиг. 4 представлена принципиальная схема примера радиокадра TDD в соответствии с иллюстративным вариантом осуществления.
На фиг. 5А и фиг. 5В представлены принципиальные схемы примеров гибкого подкадра в соответствии с иллюстративным вариантом осуществления.
На фиг. 6 представлена функциональная схема определения конфигурационной информации полудинамически сконфигурированного гибкого подкадра в соответствии с иллюстративным вариантом осуществления.
На фиг. 7 представлена функциональная схема другого способа передачи данных в соответствии с иллюстративным вариантом осуществления.
На фиг. 8 представлена блок-схема устройства передачи данных в соответствии с иллюстративным вариантом осуществления.
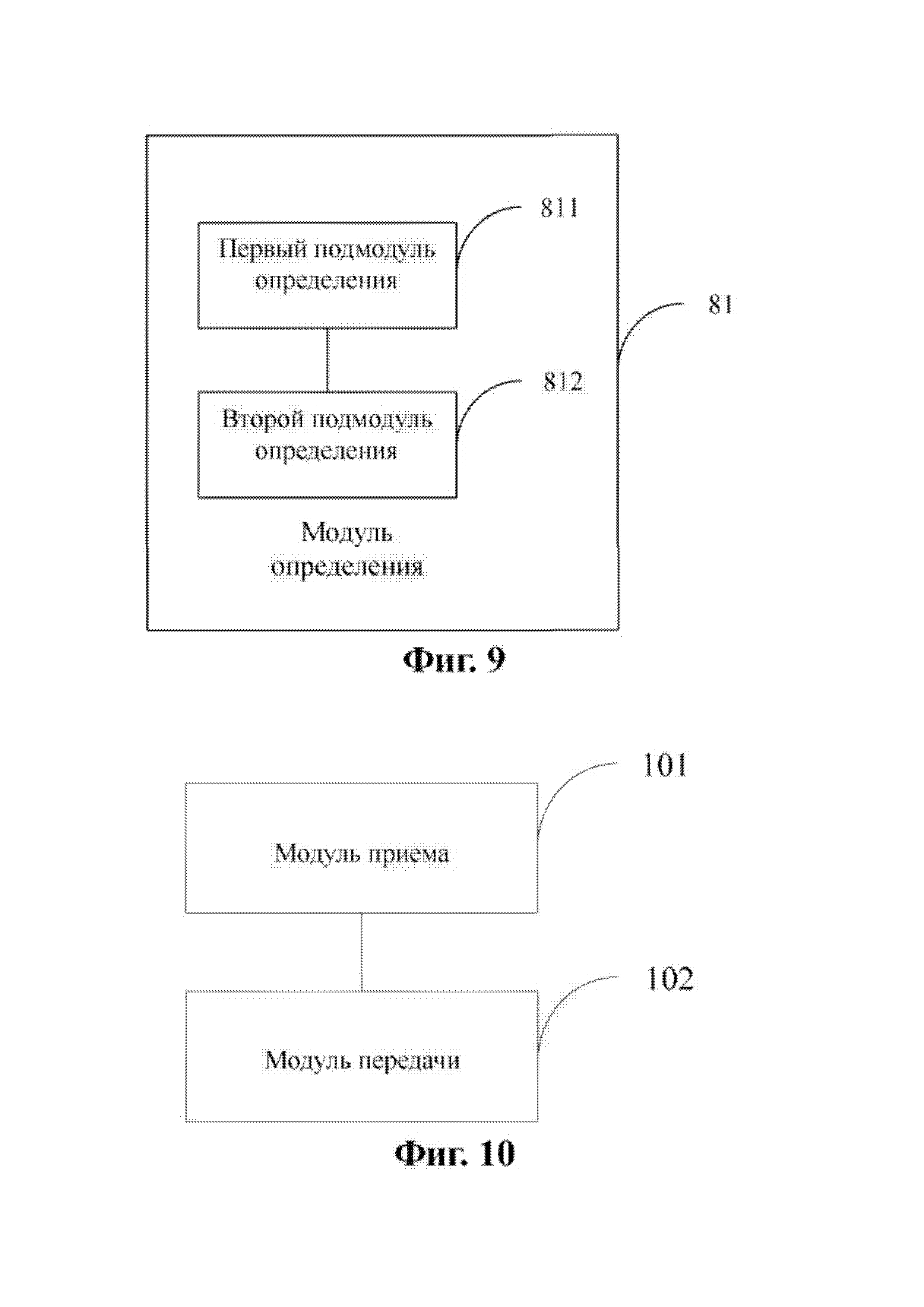
На фиг. 9 представлена блок-схема модуля определения в соответствии с иллюстративным вариантом осуществления.
На фиг. 10 представлена блок-схема другого устройства передачи данных в соответствии с иллюстративным вариантом осуществления.
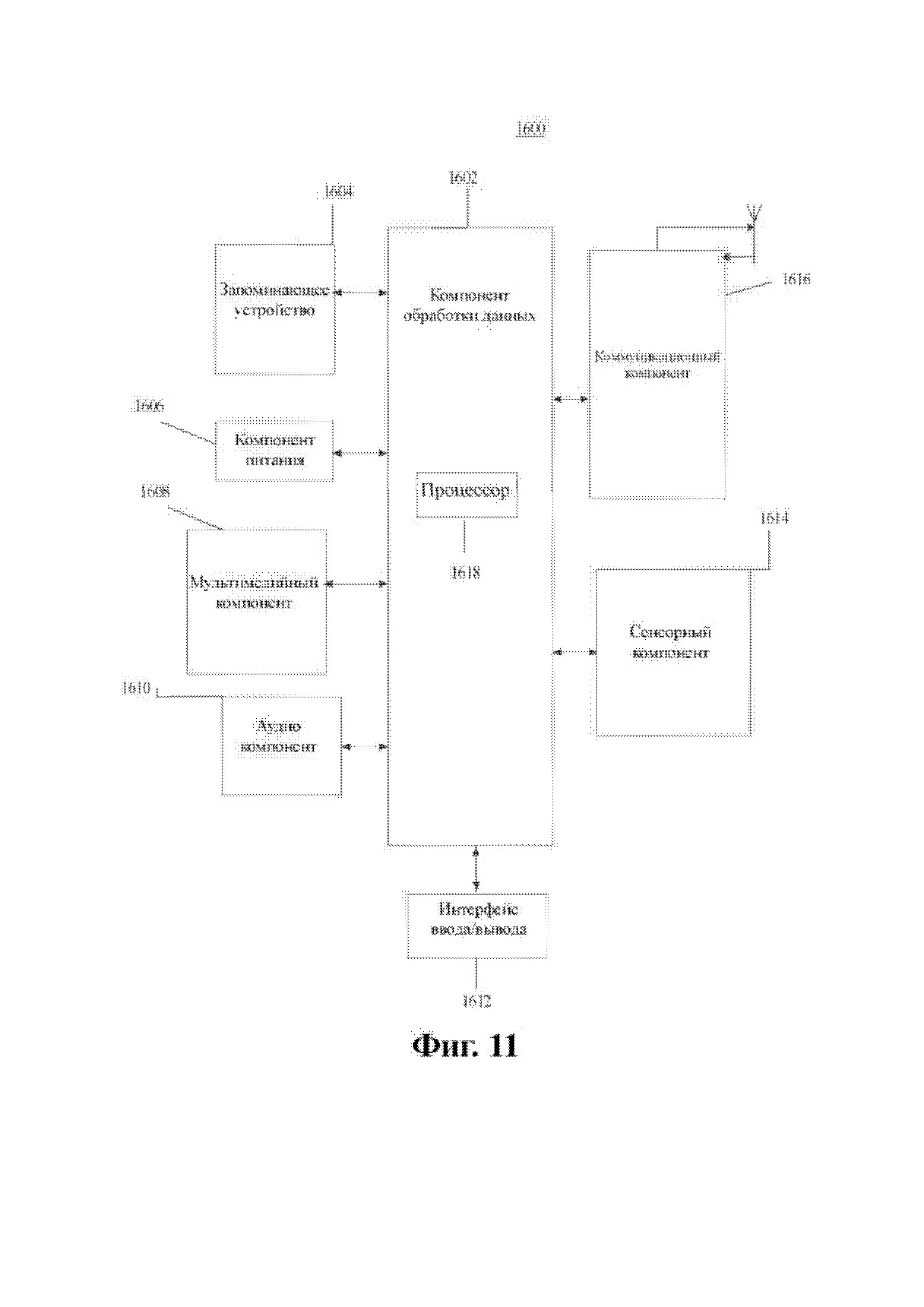
На фиг. 11 представлена блок-схема устройства, применимого для передачи данных, в соответствии с иллюстративным вариантом осуществления.
Подробное раскрытие настоящего изобретения
Далее будут подробно описаны иллюстративные варианты осуществления, примеры которых показаны на прилагаемых фигурах. В последующем раскрытии имеются ссылки на прилагаемые фигуры, где одинаковые номера на различных фигурах используются для одинаковых или подобных элементов, если не указано иное. Реализации, приведенные в последующем раскрытии иллюстративных вариантов осуществления, представляют собой не все реализации, согласующиеся с настоящим изобретением. Вместо этого они представляют собой просто примеры устройств и способов, согласующихся с аспектами, относящимися к настоящему изобретению, объем и суть которого определены в прилагаемой формуле изобретения.
Последующее раскрытие по меньшей мере одного иллюстративного варианта осуществления фактически носит чисто описательный характер и не должно рассматриваться в качестве какого-либо ограничения настоящего изобретения, а также его практического применения или использования.
Подробное описание технологий, способов и устройств, известных специалисту в данной области техники, может быть опущено. Однако там, где это уместно, такие технологии, способы и устройства следует рассматриваться как часть настоящего описания.
Во всех примерах, показанных и рассмотренных в настоящем документе, любые конкретные значения следует рассматривать как просто иллюстративные, а не ограничивающие. Следовательно, другое значение может быть использовано в другом примере иллюстративного варианта осуществления.
Следует отметить, что подобные позиции и буквы используют для обозначения подобных предметов на прилагаемых чертежах. Таким образом, после того как предмет обозначен на одном из прилагаемых чертежей, этот предмет не нуждается в дополнительном обсуждении на последующих прилагаемых чертежах.
Способ передачи данных, предоставляемый согласно вариантам осуществления настоящего изобретения, предусматривает два оконечных устройства беспроводной передачи данных, которые представляют собой базовую станцию (например, Узел В) и оборудование пользователя (UE). Базовая станция и UE обмениваются данными друг с другом в режиме дуплексирования с временным разделением (TDD). Базовая станция и UE могут передавать восходящие данные и нисходящие данные в различных временных интервалах в восходящем направлении и временных интервалах в нисходящем направлении.
В одном варианте осуществления настоящего изобретения предоставляется способ передачи данных. Рассмотрим фиг. 1, способ, реализованный на стороне базовой станции, предусматривает следующие стадии.
На стадии S101 определяют конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD. Гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы.
На стадии S102 определенную конфигурационную информацию по меньшей мере одного гибкого подкадра доставляют в UE с использованием сигнализации.
На стадии S103 восходящие данные принимают во временном интервале символа передачи в восходящем направлении, а нисходящие данные отправляют во временном интервале символа передачи в нисходящем направлении в соответствии с определенной конфигурационной информацией по меньшей мере одного гибкого подкадра.
В вышеизложенном способе передачи данных, предоставляемом согласно этому варианту осуществления настоящего изобретения, по меньшей мере один гибкий подкадр, включенный в состав радиокадра TDD, который используется для передачи, сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы. В отличие от решения конфигурации подкадров радиокадра TDD согласно предшествующему уровню техники, где один подкадр (подкадр в восходящем направлении или подкадр в нисходящем направлении) содержит только один тип символов передачи (подкадр в восходящем направлении содержит только символы передачи в восходящем направлении, а подкадр в нисходящем направлении содержит только символы передачи в нисходящем направлении), такой гибкий подкадр позволяет сконфигурировать символы передачи в восходящем и нисходящем направлениях в одном подкадре, в результате чего может быть быстро осуществлена обратная связь в виде сообщения-подтверждения от UE, снижается задержка передачи, и вместе с этим может быть в несколько раз увеличено количество UE, которые могут быть присоединены.
Согласно одному варианту осуществления на стадии S101 определенная структура гибкого подкадра может включать в себя один или несколько символов передачи в восходящем направлении и один или несколько символов передачи в нисходящем направлении, и временные подынтервалы, занимаемые всеми символами передачи в восходящем направлении и символами передачи в нисходящем направлении, расположены поочередно друг с другом. Гибкий подкадр является новым подкадром, который отличается от подкадра TDD согласно предшествующему уровню техники, и включает в себя поочередно расположенные временные подынтервалы, которые заняты символами передачи в восходящем направлении и символами передачи в нисходящем направлении.
Для того чтобы лучше пояснить способ передачи данных, предоставляемый согласно этому варианту осуществления настоящего изобретения, вначале будет приведено краткое описание структуры радиокадра TDD согласно предшествующему уровню техники.
В предшествующем уровне техники под режимом TDD подразумевается режим, в котором один диапазон рабочих частот используют для передачи в восходящем и нисходящем направлении, и восходящий сигнал и нисходящий сигнал передаются в различные периоды времени. Рассмотрим фиг. 2, на которой показана структура радиокадра в системе TDD, при этом один радиокадр характеризуется продолжительностью 10 мс и включает в себя всего десять подкадров, которые классифицированы по двум различным типам, а именно специальный подкадр и стандартный подкадр. Каждый подкадр характеризуется продолжительностью 1 мс. Стандартный подкадр включает в себя подкадр в восходящем направлении (обозначенный буквой U) и подкадр в нисходящем направлении (обозначенный буквой D). Специальный подкадр (обозначенный буквой S) включает в себя три временных интервала, а именно временной интервал пилот-сигнала в нисходящем направлении (DwPTS), GP и временной интервал пилот-сигнала в восходящем направлении (UpPTS). Подкадр в восходящем направлении и подкадр в нисходящем направлении используют для передачи сигнализации управления в восходящем и нисходящем направлениях и служебных данных. На фиг. 2 показано семь возможных схем соотношения подкадров.
В предшествующем уровне техники, как показано на фиг. 3, один подкадр в восходящем направлении или один подкадр в нисходящем направлении включает в себя только один тип символов. Например, подкадр в нисходящем направлении на фиг. 3 включает в себя только символы передачи в нисходящем направлении (обозначенные цифрой 1), а подкадр в восходящем направлении на фиг. 3 включает в себя только символы передачи в восходящем направлении (обозначенные цифрой 0). Так как один подкадр в восходящем направлении или подкадр в нисходящем направлении длится в течение 1 мс согласно структуре радиокадра TDD в предшествующем уровне техники, узел В может ожидать более нескольких миллисекунд, пока UE передаст сообщение АСК/сообщение NACK, если UE передает сообщение АСК/сообщение NACK, а узел В определяет в соответствии с указанным сообщением время и способ повторной передачи данных. Возьмем пример, где вторая конфигурация D/D/D/S/U на фиг. 2 используется для осуществления передачи данных (то есть один подкадр в восходящем направлении сконфигурирован для трех подкадров в нисходящем направлении), узлу В необходимо отправить три подкадра в нисходящем направлении и ожидать один временной интервал, прежде чем узел В сможет получить один подкадр в восходящем направлении, в результате чего задержка составляет более 4 мс. Таким образом, в предшествующем уровне техники не может быть выполнено требование URLLC о задержке не более 1 мс.
Для того чтобы решить вышеизложенную проблему и снизить задержки передачи, в вышеизложенном способе передачи данных, предоставляемом согласно этому варианту осуществления настоящего изобретения, усовершенствуют структуры подкадра в восходящем направлении и подкадра в нисходящем направлении согласно предшествующему уровню техники. Конфигурирование временных подынтервалов, соответствующих символам передачи в восходящем и нисходящем направлениях, может быть гибко реализовано в одном подкадре. В результате этого UE может выполнять обратную связь в виде сообщения АСК/сообщения NACK в течение относительно короткого времени (по меньшей мере менее 1 мс), что значительно снижает задержку передачи.
Базовая станция может установить местоположения и продолжительности символов передачи в восходящем и нисходящем направлениях в гибком подкадре радиокадра TDD в соответствии с услугой, пропускной способности сети, помехами и т.п. Предварительно установленная продолжительность, например 1 мс, может сохраняться неизменной для общей продолжительности гибкого подкадра.
В соответствии с конкретной реализацией все или некоторые из стандартных подкадров (включая подкадры в восходящем и нисходящем направлениях) в радиокадре TDD согласно предшествующему уровню техники могут быть заменены структурой гибкого подкадра, предоставляемой согласно этому варианту осуществления настоящего изобретения. Структура специального подкадра согласно предшествующему уровню техники может быть оставлена без изменений. Например, структуру подкадра D или U на фиг. 2 (каждый подкадр включает в себя один тип символов передачи) продолжают использовать для некоторых подкадров, а структуру гибкого подкадра, предоставляемую согласно этому варианту осуществления настоящего изобретения, используют для остальных подкадров; или структуры всех стандартных подкадров в радиокадре TDD заменяют структурой гибкого подкадра, предоставляемой согласно этому варианту осуществления настоящего изобретения.
Например, в случае использования второй конфигурации, показанной на фиг. 2, вышеизложенная структура подкадра, предоставляемая согласно этому варианту осуществления настоящего изобретения, может быть использована для всех восьми подкадров в местоположениях U и D, при этом структуры восьми подкадров могут быть одинаковыми или различными. Альтернативно, как показано на фиг. 4, пять из восьми подкадров характеризуются структурой гибкого подкадра, и структуры остальных подкадров являются такими же, как и в предшествующем уровне техники.
Согласно возможной реализации иллюстративного варианта осуществления настоящего изобретения определение конфигурационной информации гибкого подкадра в радиокадре TDD на стадии 101 может дополнительно включать в себя: установку GP в гибком подкадре. GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления, для одного и того же гибкого подкадра, GP может дополнительно устанавливаться между символом передачи в нисходящем направлении и соседним символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
В одном и том же подкадре, когда происходит переход от символа передачи в нисходящем направлении к символу передачи в восходящем направлении (символ передачи в восходящем направлении следует сразу после символа передачи в нисходящем направлении) в соответствии с хронологическим порядком, необходимо установить GP между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, который следует сразу после символа передачи в нисходящем направлении. С одной стороны, GP, расположенный при преобразовании символа передачи в нисходящем направлении в символ передачи в восходящем направлении, служит для предотвращения возникновения помех для восходящего сигнала со стороны нисходящего сигнала; с другой стороны, при наличии множества UE присутствие GP может обеспечивать синхронизацию между различными UE, что устраняет блокировку во время передачи данных, а также улучшает эффективность передачи данных.
В случае структуры радиокадра TDD, предоставляемой согласно этому варианту осуществления настоящего изобретения, структура гибкого подкадра обеспечивает альтернативный переход между восходящим и нисходящим направлениями, если GP установлен при переходе от символа передачи в нисходящем направлении к символу передачи в восходящем направлении. Согласно этому варианту осуществления настоящего изобретения местоположения и продолжительности символа передачи в восходящем направлении, символа передачи в нисходящем направлении и GP в каждом гибком подкадре не ограничены, при этом они могут быть определены всесторонним образом в соответствии с требованиями к услуге, покрытием сети, пропускной способностью, помехами и т.п.
Структура иллюстративного гибкого подкадра показана на фиг. 5А. В примере, показанном на фиг. 5А, гибкий подкадр содержит три GP, которые расположены соответствующим образом в переходах от трех подкадров в нисходящем направлении к соответствующим им подкадрам в восходящем направлении.
Согласно другому варианту осуществления GP сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Например, согласно возможной реализации иллюстративного варианта осуществления настоящего изобретения, когда символ передачи в нисходящем направлении имеется в хвосте предыдущего подкадра для текущего гибкого подкадра (предыдущий подкадр может быть стандартным подкадром в нисходящем направлении согласно предшествующему уровню техники или гибким подкадром согласно этому варианту осуществления настоящего изобретения), а символ передачи в восходящем направлении имеется в голове текущего гибкого подкадра, GP может быть установлен перед символом передачи в восходящем направлении в голове текущего гибкого подкадра.
Согласно этому варианту осуществления настоящего изобретения, помимо рассмотрения установки GP между символами передачи в одном гибком подкадре, дополнительно необходимо рассмотреть установку GP между двумя гибкими подкадрами, а также установку GP между гибким подкадром и стандартным подкадром согласно предшествующему уровню техники. В этом случае, если предыдущий подкадр является подкадром в нисходящем направлении согласно предшествующему уровню техники (все символы являются символами передачи в нисходящем направлении) или если символ передачи в хвосте предыдущего подкадра является символом передачи в нисходящем направлении, необходимо установить GP в голове текущего гибкого подкадра, то есть перед символом передачи в восходящем направлении, который появляется первый раз.
Структура иллюстративного гибкого подкадра показана на фиг. 5В. В примере, показанном на фиг. 5В, GP имеется в голове гибкого подкадра, а также дополнительно включены два GP. Этот случай подобен случаю, показанному на фиг. 5А, и дополнительно не будет описываться в настоящем документе.
В способе передачи данных, предоставляемом согласно этому варианту осуществления настоящего изобретения, структура определенного гибкого подкадра не ограничивается двумя структурами, показанными на фиг. 5А и фиг. 5В, и различные формы могут быть использованы при соблюдении указанного принципа конфигурации. Согласно этому варианту осуществления настоящего изобретения структура не имеет ограничений.
Различные GP в одном и том же гибком подкадре могут характеризоваться одинаковой или различной продолжительностью. Это определяется в соответствии с продолжительностями символов передачи в восходящем и нисходящем направлениях.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя по меньшей мере один динамически сконфигурированный гибкий подкадр. Соответственно, стадия S101 может быть реализована следующим образом: периодическое определение местоположения, информации о заполнении и продолжительности каждого временного подынтервала в динамически сконфигурированном гибком подкадре.
При упоминании «динамически сконфигурированного гибкого подкадра» подразумевается, что каждая часть гибкого подкадра может быть сконфигурирована и реконфигурирована с различными периодичностями.
В случае динамически сконфигурированного гибкого подкадра, в течение различных периодов местоположения, продолжительности и соотношения символов передачи в восходящем направлении, символов передачи в нисходящем направлении и GP в гибком подкадре могут быть полностью изменены с различными периодичностями. Продолжительности, местоположения и соотношения всех символов передачи в восходящем направлении, символов передачи в нисходящем направлении и GP могут быть динамически изменены.
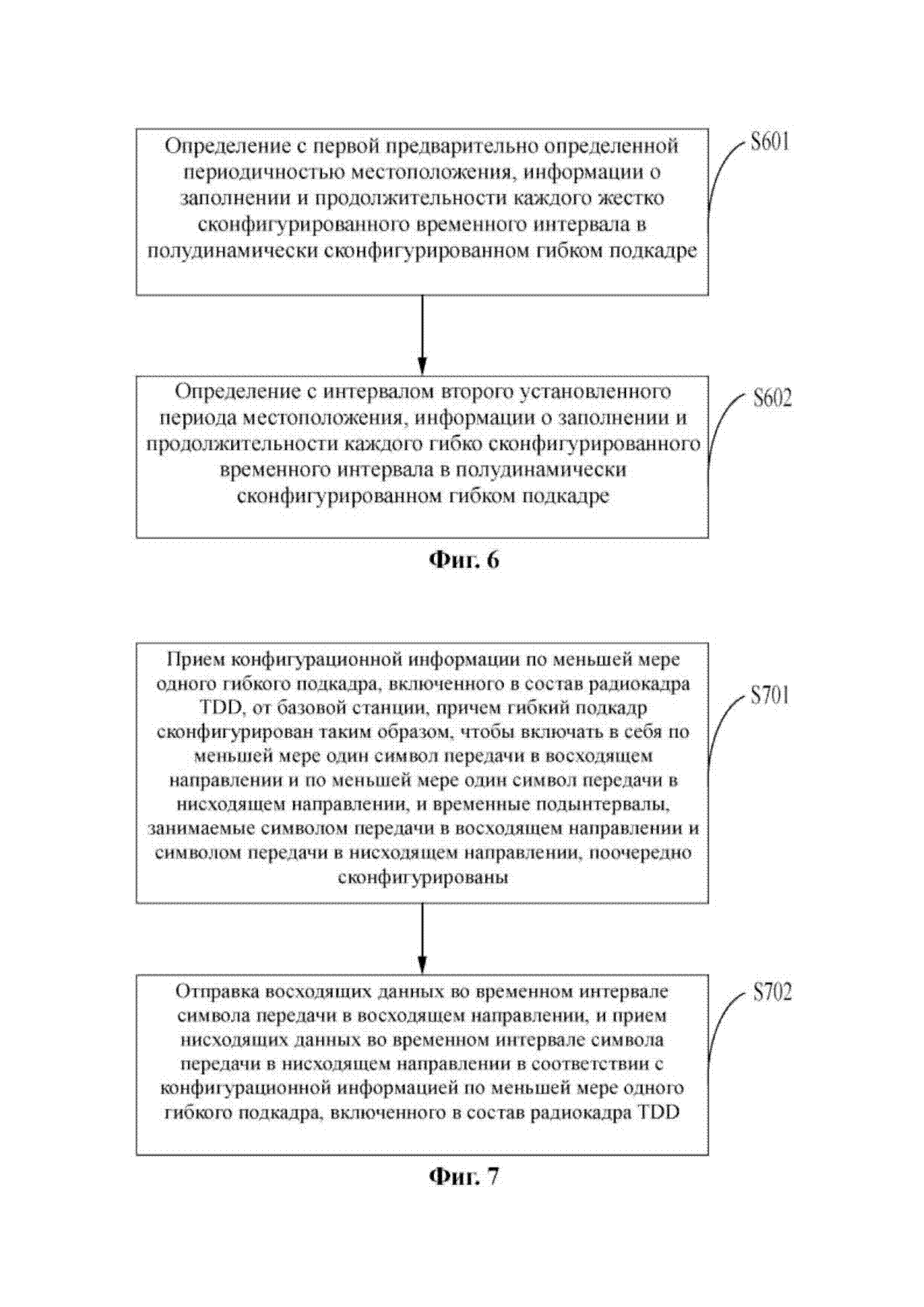
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр может включать в себя полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр включает в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Соответственно, как показано на фиг. 6, стадия S101 может быть реализована следующим образом.
На стадии S601 местоположение, информацию о заполнении и продолжительность каждого жестко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре определяют с первой предварительно определенной периодичностью.
На стадии S602 местоположение, информацию о заполнении и продолжительность каждого гибко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре определяют со второй предварительно определенной периодичностью.
Первая предварительно определенная периодичность превышает вторую предварительно определенную периодичность.
Жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал характеризуются различными периодичностями конфигурирования. Соответственно, на стадии S102 после определения местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала необходимо отправить информацию относительно местоположений, информации о заполнении и продолжительностей этих жестко сконфигурированных временных интервалов в UE с использованием предварительно установленной сигнализации. Аналогично, после определения местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала необходимо отправить информацию относительно местоположений, информации о заполнении и продолжительностей этих жестко сконфигурированных временных интервалов в UE с использованием предварительно установленной сигнализации.
Согласно иллюстративному примеру периодичность конфигурирования для жестко сконфигурированного временного интервала может быть бесконечно большой. Таким образом, необходимо только один раз сконфигурировать жестко сконфигурированный временной интервал, который впоследствии остается неизменным, при этом сохраняются изменения гибко сконфигурированного временного интервала с относительно короткой периодичностью.
На стадии S102 могут быть несколько типов предварительно установленной сигнализации. Например, предварительно установленная сигнализация может быть одной из следующих сигнализаций: широковещательная сигнализация, сигнализация RRC и сигнализация физического уровня. Разумеется, этот вариант осуществления настоящего изобретения не ограничивается несколькими типами сигнализации согласно вышеизложенному.
Длина периодичности может быть определена в соответствии с периодичностью используемой сигнализации. Например, периодичность, сконфигурированная для широковещательной сигнализации, является относительно большой и составляет приблизительно 640 мс. Периодичность, сконфигурированная для сигнализации RRC, является средней и составляет приблизительно 100-200 мс. Периодичность, сконфигурированная для сигнализации физического слоя, может быть самой короткой и может составлять 10 мс или даже меньше.
На стадиях S601 и S602 при относительно короткой периодичности местоположение, информация о заполнении и продолжительность нежестко сконфигурированного временного интервала в гибком подкадре изменяются посредством настройки конфигурации. При этих периодах возможно изменить структуру только нежестко сконфигурированного временного интервала в гибком подкадре, и необходимо только отправить информацию о структуре измененной части в UE. Местоположение, информация о заполнении и продолжительность жестко сконфигурированного временного интервала в гибком подкадре изменяются только с относительно большой периодичностью. По сравнению с динамически сконфигурированным гибким подкадром такой способ передачи данных может в определенной степени сохранить заголовки сигнализации управления, а также способствовать поиску того, какие символы могут потенциально вызывать помехи в процессе подавления помех. Тем не менее гибкость является относительно низкой.
Первая предварительно определенная периодичность превышает вторую предварительно определенную периодичность. В результате этого сигнализация, используемая на стадии S601, и сигнализация, используемая на стадии S602, обычно характеризуются различными периодичностями. Например, если широковещательную сигнализацию используют для отправки информации о структуре части жестко сконфигурированного временного интервала в гибком подкадре, реконфигурация выполняется только примерно каждые 640 мс. Для части нежестко сконфигурированного временного интервала в гибком подкадре используют сигнализацию, характеризующуюся относительно короткой периодичность, чтобы осуществить настройку конфигурации. Например, при использовании сигнализации физического слоя настройка конфигурации может выполняться каждые 10 мс или даже быстрее. Конфигурация части нежестко сконфигурированного временного интервала требует сигнализацию с более короткой периодичностью. В сущности говоря, полудинамически сконфигурированный гибкий подкадр сохраняет больше заголовков сигнализации по сравнению с динамически сконфигурированным гибким подкадром.
В одном варианте осуществления настоящего изобретения предоставляется другой способ передачи данных. Рассмотрим фиг. 7, способ, реализованный на стороне UE, предусматривает следующие стадии.
На стадии S701 конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, принимают от базовой станции. Гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы.
На стадии S702 восходящие данные отправляют во временном интервале символа передачи в восходящем направлении, а нисходящие данные принимают во временном интервале символа передачи в нисходящем направлении в соответствии с конфигурационной информацией по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD.
В вышеизложенном способе передачи данных, предоставляемом согласно этому варианту осуществления настоящего изобретения, UE принимает конфигурационную информацию гибкого подкадра, включенного в состав радиокадра TDD, от базовой станции. Гибкий подкадр включает в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы. В отличие от решения конфигурации подкадров радиокадра TDD в известном уровне техники, где один подкадр (подкадр в восходящем направлении или подкадр в нисходящем направлении) содержит только один тип символов передачи (подкадр в восходящем направлении содержит только символы передачи в восходящем направлении, а подкадр в нисходящем направлении содержит только символы передачи в нисходящем направлении), такой гибкий подкадр позволяет сконфигурировать символы передачи в восходящем и нисходящем направлениях в одном подкадре, в результате чего может быть мгновенно осуществлена обратная связь в виде сообщения-подтверждения от UE, снижается задержка передачи, и вместе с этим может быть в несколько раз увеличено количество UE, которые могут быть присоединены.
Согласно одному варианту осуществления гибкий подкадр сконфигурирован таким образом, чтобы дополнительно включать в себя GP, при этом GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Что касается конкретного способа реализации GP в гибком подкадре, то ссылка может быть сделана на способ передачи данных на стороне базовой станции, при этом он более не будет рассматриваться в настоящем документе.
Согласно одному варианту осуществления GP сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном и том же гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении. Альтернативно, GP сконфигурирован для расположения между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя по меньшей мере один динамически сконфигурированный гибкий подкадр. Соответственно, прием конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, от базовой станции на стадии S701 может быть реализован в качестве периодического приема от базовой станции информации о структуре по меньшей мере одного динамически сконфигурированного гибкого подкадра в радиокадре TDD. Местоположение, информация о заполнении и продолжительность каждого временного подынтервала в динамически сконфигурированном гибком подкадре являются периодически и динамически сконфигурированными.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя по меньшей мере один полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр включает в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Соответственно, прием конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, от базовой станции на стадии S701 может быть реализована следующим образом: с первой предварительно определенной периодичностью прием от базовой станции конфигурационной информации относительно местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре; и со второй предварительно определенной периодичностью прием от базовой станции конфигурационной информации относительно местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре. Первая предварительно определенная периодичность превышает вторую предварительно определенную периодичность.
Далее приведены варианты осуществления устройств согласно настоящему изобретению. Устройства могут быть сконфигурированы для осуществления вышеизложенных вариантов осуществления способов передачи данных согласно настоящему изобретению.
На фиг. 8 представлена блок-схема устройства передачи данных в соответствии с иллюстративным вариантом осуществления настоящего изобретения. Устройство используется в базовой станции и включает в себя модули 81, 82 и 83, как показано на фиг. 8.
Модуль 81 определения выполнен с возможностью определения конфигурационной информации по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD. Гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы.
Модуль 82 отправки выполнен с возможностью доставлять определенную конфигурационную информацию по меньшей мере одного гибкого подкадра в UE с использованием сигнализации.
Модуль 83 передачи выполнен с возможностью: в соответствии с определенной конфигурационной информацией по меньшей мере одного гибкого подкадра принимать восходящие данные во временном интервале символа передачи в восходящем направлении и отправлять нисходящие данные во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления, как показано на фиг. 9, модуль 81 определения содержит: первый подмодуль 811 определения, выполненный с возможностью определения конфигурационной информации GP в гибком подкадре. GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления первый подмодуль 811 определения выполнен с возможностью определения того, что GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении; или что GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления, как показано на фиг. 9, модуль 81 определения дополнительно содержит: второй подмодуль 812 определения.
Второй подмодуль 812 определения выполнен с возможностью: определения для каждого гибкого подкадра местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в восходящем направлении, а также местоположения и продолжительности временного подынтервала, занимаемого каждым символом передачи в нисходящем направлении.
Первый подмодуль 811 определения выполнен с возможностью: определения местоположения и продолжительности временного подынтервала, занимаемого GP, когда гибкий подкадр сконфигурирован таким образом, чтобы дополнительно включать в себя GP.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя динамически сконфигурированный гибкий подкадр. Соответственно, модуль 81 определения выполнен с возможностью периодического определения местоположения, информации о заполнении и продолжительности каждого временного подынтервала в динамически сконфигурированном гибком подкадре.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя полудинамически сконфигурированный гибкий подкадр, и полудинамически сконфигурированный гибкий подкадр включает в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Соответственно, модуль 81 определения выполнен с возможностью: с первой предварительно определенной периодичностью определять местоположение, информацию о заполнении и продолжительность каждого жестко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре; и со второй предварительно определенной периодичностью определять местоположение, информацию о заполнении и продолжительность каждого гибко сконфигурированного временного интервала в полудинамически сконфигурированном гибком подкадре. Первая предварительно определенная периодичность превышает вторую предварительно определенную периодичность.
Согласно одному варианту осуществления сигнализация может включать в себя: широковещательную сигнализацию, сигнализацию RRC и сигнализацию физического уровня. Тем не менее этот вариант осуществления настоящего изобретения не ограничивается вышеперечисленным.
На фиг. 10 представлена блок-схема другого устройства передачи данных в соответствии с иллюстративным вариантом осуществления настоящего изобретения. Устройство используется в UE и включает в себя следующие модули 101 и 102, как показано на фиг. 10.
Модуль 101 приема выполнен с возможностью принимать от базовой станции конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в радиокадр TDD. Гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, при этом временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы.
Модуль 102 передачи выполнен с возможностью: в соответствии с конфигурационной информацией по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, отправлять восходящие данные во временном интервале символа передачи в восходящем направлении и принимать нисходящие данные во временном интервале символа передачи в нисходящем направлении.
Согласно одному варианту осуществления модуль 101 приема выполнен с возможностью приема конфигурационной информации GP в гибком подкадре. GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления модуль 101 приема дополнительно выполнен с возможностью приема конфигурационной информации GP в гибком подкадре, указывающей на одной из следующего: GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в одном гибком подкадре, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении; или GP располагается между символом передачи в нисходящем направлении и символом передачи в восходящем направлении в соседних гибких подкадрах, когда символ передачи в нисходящем направлении преобразуется в символ передачи в восходящем направлении.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя по меньшей мере один динамически сконфигурированный гибкий подкадр. Соответственно, модуль 101 приема выполнен с возможностью периодического приема от базовой станции информации о структуре по меньшей мере одного динамически сконфигурированного гибкого подкадра в радиокадре TDD. Местоположение, информация о заполнении и продолжительность каждого временного подынтервала в динамически сконфигурированном гибком подкадре являются периодически и динамически сконфигурированными.
Согласно одному варианту осуществления по меньшей мере один гибкий подкадр включает в себя по меньшей мере один полудинамически сконфигурированный гибкий подкадр. Полудинамически сконфигурированный гибкий подкадр включает в себя жестко сконфигурированный временной интервал и гибко сконфигурированный временной интервал. Соответственно, модуль 101 приема выполнен с возможностью: с первой предварительно определенной периодичностью принимать от базовой станции конфигурационную информацию относительно местоположения, информации о заполнении и продолжительности каждого жестко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре; и со второй предварительно определенной периодичностью принимать от базовой станции конфигурационную информацию относительно местоположения, информации о заполнении и продолжительности каждого гибко сконфигурированного временного интервала в по меньшей мере одном полудинамически сконфигурированном гибком подкадре в радиокадре. Первая предварительно определенная периодичность превышает вторую предварительно определенную периодичность.
В отношении устройств согласно вышеизложенным вариантам осуществления необходимо отметить, что конкретные способы выполнения операций различными модулями уже подробно описаны в вариантах осуществления, относящихся к способам, и не будут более подробно описываться в настоящем документе.
При помощи способа и устройства передачи данных, компьютерной программы и носителя данных, предоставляемых согласно вариантам осуществления настоящего изобретения, вначале определяют конфигурационную информацию по меньшей мере одного гибкого подкадра, включенного в состав радиокадра TDD, где гибкий подкадр сконфигурирован таким образом, чтобы включать в себя по меньшей мере один символ передачи в восходящем направлении и по меньшей мере один символ передачи в нисходящем направлении, и временные подынтервалы, занимаемые символом передачи в восходящем направлении и символом передачи в нисходящем направлении, поочередно сконфигурированы; затем отправляют определенную конфигурационную информацию по меньшей мере одного подкадра в UE при помощи сигнализации; и затем передают восходящие данные и нисходящие данные в соответствии с конфигурационной информацией гибкого подкадра. В отличие от решения конфигурации подкадров радиокадра TDD согласно предшествующему уровню техники, где один подкадр (подкадр в восходящем направлении или подкадр в нисходящем направлении) содержит только один тип символов передачи (подкадр в восходящем направлении содержит только символы передачи в восходящем направлении, а подкадр в нисходящем направлении содержит только символы передачи в нисходящем направлении), конфигурирование символов передачи в восходящем направлении и нисходящем направлении может быть реализовано в одном подкадре, в результате чего может быть быстро осуществлена обратная связь в виде сообщения-подтверждения, такого как АСК/ NACK, от UE, а также желаемо снижена задержка передачи.
Согласно другому аспекту в способе передачи данных, предоставляемом согласно этому варианту осуществления настоящего изобретения, гибкий подкадр включает в себя динамически сконфигурированный гибкий подкадр и полудинамически сконфигурированный гибкий подкадр, и структура гибкого подкадра может быть сконфигурирована полностью гибко или сконфигурирована частично гибко, так что конфигурирование подкадра TDD становится более гибким, и реконфигурация может быть выполнена в соответствии с таким факторами, как тип услуги, покрытие сети, пропускная способность сети и помехи в сети, что тем самым полностью удовлетворяет требование услуги TDD с асимметричными потоками данных в восходящем и нисходящем направлениях.
Более того, по сравнению с динамически сконфигурированным гибким подкадром использование структуры полудинамически сконфигурированного гибкого подкадра для осуществления передачи данных может способствовать сохранению заголовков сигнализации управления, а также способствовать определению того, какие символы могут создавать помехи при подавлении помех.
На фиг. 11 представлена блок-схема устройства, применимого для передачи данных, в соответствии с иллюстративным вариантом осуществления. Например, устройство 1600 может быть мобильным телефоном, компьютером, терминалом цифрового вещания, устройством обмена сообщениями, игровой консолью, планшетным компьютером, медицинским устройством, тренажерным оборудованием, персональным виртуальный ассистент и т.п.
Рассмотрим фиг. 11, устройство 1600 может включать в себя один или несколько из следующих компонентов: компонент 1602 обработки данных, запоминающее устройство 1604, компонент 1606 питания, мультимедийный компонент 1608, аудиокомпонент 1610, интерфейс 1612 ввода-вывода, сенсорный компонент 1614 и коммуникационный компонент 1616.
Коммуникационный компонент 1616 включает в себя модуль Bluetooth, поддерживающий стандартный протокол беспроводной технологии Bluetooth с низким потреблением энергии (BLE). Модуль Bluetooth включает в себя управляющую микросхему и микросхему Bluetooth, соединенную с управляющей микросхемой.
Компонент 1602 обработки данных обычно управляет всеми операциями устройства 1600, такими как операции, связанные с отображением, телефонные звонки, передача данных, операции камеры и операции записи. Компонент 1602 обработки данных может включать в себя один или несколько процессоров 1618, предназначенных для выполнения команд для осуществления всех или части стадий вышеописанных способов. Более того, компонент 1602 обработки данных может включать в себя один или несколько модулей, которые способствуют взаимодействию между компонентом 1602 обработки данных и другими компонентами. Например, компонент 1602 обработки данных может включать в себя мультимедийный модуль, чтобы способствовать взаимодействию между мультимедийным компонентом 1608 и компонентом 1602 обработки данных.
Запоминающее устройство 1604 сконфигурировано для хранения различных типов данных, чтобы поддерживать функционирование устройства 1600. Примеры таких данных включают в себя команды для любых приложений и способов, выполняемых на устройстве 1600, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.п. Запоминающее устройство 1604 может быть реализовано с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как, например, статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
Компонент 1606 питания снабжает энергией различные компоненты устройства 1600. Компонент 1606 питания может включать в себя систему управления питанием, один или несколько источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением энергии в устройстве 1600.
Мультимедийный компонент 1608 включает в себя экран, предоставляющий интерфейс вывода между устройством 1600 и пользователем. Согласно некоторым вариантам осуществления экран может включать в себя жидкокристаллический дисплей (ЖК-дисплей) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован в качестве сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или несколько датчиков касания для обнаружения прикосновений к сенсорной панели, проведений пальцем(ами) по экрану сенсорной панели и жестов на сенсорной панели. Датчики касания могут не только обнаруживать границу действия прикосновения или проведения пальцем по экрану, но также обнаруживать связанные с ними период времени и давление. Согласно некоторым вариантам осуществления мультимедийный компонент 1608 включает в себя фронтальную камеру и/или тыловую камеру. Фронтальная камера и тыловая камера могут принимать внешние мультимедийные данные, когда устройство 1600 находится в рабочем режиме, таком как режим фотосъемки или записи видео. Каждая из фронтальной камеры и тыловой камеры может представлять собой систему с фиксированной оптической линзой или иметь возможности фокусировки и оптического масштабирования.
Аудиокомпонент 1610 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 1610 включает в себя микрофон («MIC»), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 1600 находится в рабочем режиме, таком как режим вызова, режим записи и режим распознавания речи. Принимаемый аудиосигнал может быть дополнительно сохранен в запоминающем устройстве 1604 или передан через коммуникационный компонент 1616. Согласно некоторым вариантам осуществления аудиокомпонент 1610 дополнительно включает в себя динамик для вывода аудиосигналов.
Интерфейс 1612 ввода-вывода предоставляет интерфейс между компонентом 1602 обработки данных и периферийными интерфейсными модулями, такими как клавиатура, колесико манипулятора типа «мышь», кнопки и т.п. Кнопки могут включать в себя, кроме прочего, кнопку перехода на домашнюю страницу, кнопку громкости, кнопку запуска и кнопку блокировки.
Сенсорный компонент 1614 включает в себя один или несколько датчиков для предоставления оценки состояния различных аспектов устройства 1600. Например, сенсорный компонент 1614 может обнаруживать открытое/закрытое состояние устройства 1600, относительное позиционирование компонентов, например дисплея и клавишной панели, устройства 1600, изменение позиции устройства 1600 или компонента устройства 1600, присутствие или отсутствие контакта пользователя с устройством 1600, ориентацию или ускорение/замедление устройства 1600 и изменение температуры устройства 1600. Сенсорный компонент 1614 может включать в себя бесконтактный датчик, выполненный с возможностью обнаруживать присутствие находящихся рядом объектов без физического контакта. Сенсорный компонент 1614 также может включать в себя светочувствительный датчик, такой как CMOS- или CCD-датчик изображений, для использования в приложениях формирования изображений. Согласно некоторым вариантам осуществления сенсорный компонент 1614 также может включать в себя датчик акселерометра, гиродатчик, магнитный датчик, датчик давления или температурный датчик.
Коммуникационный компонент 1616 выполнен с возможностью способствовать обмену данными в проводном или в беспроводном режиме между устройством 1600 и другими устройствами. Устройство 1600 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как Wi-Fi, 2G или 3G или их комбинация. Согласно одному иллюстративному варианту осуществления коммуникационный компонент 1616 принимает широковещательный сигнал или ассоциированную с широковещательной передачей информацию из внешней системы управления широковещательной передачей через широковещательный канал. Согласно одному иллюстративному варианту осуществления коммуникационный компонент 1616 дополнительно включает в себя модуль беспроводной связи ближнего радиуса действия (NFC), чтобы способствовать связи ближнего радиуса действия. Например, NFC-модуль может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии по стандарту Ассоциации по передаче данных в инфракрасном диапазоне (IrDA), технологии по стандарту сверхширокополосной связи (UWB), технологии Bluetooth (ВТ) и других технологий.
Согласно иллюстративному варианту осуществления устройство 1600 может быть реализовано с помощью одной или нескольких специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для осуществления вышеописанных способов.
Согласно иллюстративному варианту осуществления также предусмотрен энергонезависимый машиночитаемый носитель данных, включающий в себя команды, к примеру, включенные в запоминающее устройство 1604, выполняемые посредством процессора 1618 в устройстве 1600, для осуществления вышеописанных способов. Например, энергонезависимый машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск и оптическое устройство хранения данных и т.п.
Настоящее изобретение также предоставляет носитель данных, характеризующийся наличием записанной на нем компьютерной программы. Программа включает в себя команды, используемые для осуществления способа передачи данных согласно вышеизложенным вариантам осуществления настоящего изобретения.
Настоящее изобретение также предоставляет компьютерную программу, которая содержит команды для осуществления способа передачи данных согласно вышеизложенным вариантам осуществления настоящего изобретения, когда указанная компьютерная программа выполняется на компьютере.
Следует полагать, что настоящее описание включает в себя несколько изобретений, которые обладают независимой друг от друга эффективностью. Хотя каждое из этих изобретений раскрыто в своей предпочтительной форме, как рассмотрено в настоящем документе, конкретный способ его реализации не должен рассматриваться в качестве ограничивающего, так как могут дополнительно существовать многочисленные варианты. Каждый пример ограничивает способ реализации, определенный в вышеизложенном описании, но любой пример не обязательно включает в себя все признаки или комбинации, которые в конечном итоге должны быть защищены. Если в настоящем документе описываются «один» или «первый» компонент и его эквиваленты, такое описание включает в себя один такой компонент или несколько таких компонентов и не требует и не исключает два или несколько таких компонентов. Кроме того, порядковые номера (например, первый, второй и третий), используемые для идентификации компонентов, применяются для проведения различия между этими компонентами, при этом они не требуют определенного количества компонентов или ограниченного количества компонентов, а также не указывают местоположения или порядок этих компонентов, если конкретно не указано другое.
Другие решения по реализации настоящего изобретения будут очевидны специалистам в данной области техники при рассмотрении настоящего описания и осуществлении на практике раскрытого в настоящем документе изобретения. Эта заявка предназначена для охвата различных вариаций, практических применений или адаптаций настоящего изобретения в соответствии с его общими принципами, включая такие отступления от настоящего изобретения, которые соответствуют известной или обычной практике в данной области техники. Предполагается, что описание и примеры будут рассматриваться лишь в качестве иллюстративных, при этом истинные объем и суть настоящего изобретения изложены в прилагаемой формуле изобретения.
Следует понимать, что настоящее изобретение не ограничивается точной структурой, которая была описана и проиллюстрирована на прилагаемых фигурах, и что различные модификации и изменения могут быть внесены без отступления от его объема. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
Складной терминал
Пользовательское оборудование и способ беспроводной связи
Способ и устройство для передачи данных, оборудование пользователя и базовая станция
Способы кодирования и декодирования, кодер и декодер, и носитель данных
Способ и аппарат для обратной связи гибридного автоматического запроса на повторную передачу
Способ и аппарат для обратной связи гибридного автоматического запроса на повторную передачу
Сталь для морской швартовной цепи высокой прочности и гибкости класса r6, предназначенной для постановки на якорь плавучего тела с катодной защитой, и швартовная цепь из нее

