Результат интеллектуальной деятельности: Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС
Вид РИД
Изобретение
Изобретение относится к области навигации, навигационных приборов, испытаниям и калибровке, и может быть использовано для калибровки датчиков бесплатформенных инерциальных систем ориентации и навигации летательных аппаратов, морских, наземных и других подвижных объектов. Интегрированный блок датчиков (ИБД) представляет собой вмонтированные в общий корпус тройку ортогонально расположенных датчиков угловых скоростей (ДУС) и тройку ортогональных датчиков линейных ускорений (ДЛУ), у которых соответствующие оси чувствительности коллинеарны. Эти блоки также называют инерциальными измерительными модулями (ИИМ).
Для решения определенных задач и при составлении технологии сборки инерциальных датчиков возникает необходимость определения неортогональности осей чувствительности датчиков ДУС и ДЛУ в составе ИБД с высокой точностью. Особенно это относится к ИБД, применяемым на летательных аппаратах, маневрирующих с большими угловыми скоростями и линейными ускорениями. Основная проблема в следующем. Вне зависимости от того, выполняется ли оценка неортогональности по измерениям угловых скоростей или по измерениям углов за определенное время, а также независимо от вида расчетных формул, использование данных вращения только по трем осям делает необходимой предварительную компенсацию смещений нулей. Это приводит к распространению ошибок компенсации смещений на ошибки идентификации углов неортогональности и масштабных коэффициентов. В силу высокой чувствительности оценок неортогональности к смещениям нулей их точность значительно падает.
В изобретении предлагается устранить вредное влияние остаточных ошибок компенсации нулей на ошибки определения неортогональности за счет повышения информативности экспериментальных данных. Это особенно актуально для микроэлектромеханических ДУС (МЭМС ДУС).
Известен быстрый способ калибровки ИИМ [1]. В соответствии с данным способом, оператор вращает ИИМ во всех направлениях без внешнего оборудования либо с помощью оборудования. Снимаемые в это время с ИИМ данные позволяют определять 12 коэффициентов моделей погрешностей датчиков ИИМ, в том числе скорости дрейфов и масштабные коэффициенты ДУС, нулевые сигналы и масштабные коэффициенты акселерометров.
Известен также способ калибровки ДУС в составе бесплатформенных инерциальных измерительных модулей (БИИМ) [2], при этом по сигналам двухкомпонентного ДУС и трех однокомпонентных акселерометров, т.е. блока акселерометров, входящих в состав БИИМ, калибруют коэффициенты модели угловой скорости дрейфа каждого ДУС, зависящего и не зависящего от линейных перегрузок, а также углы отклонений двух его осей чувствительности и оси кинетического момента от их номинальных направлений, материализуемых установочной плоскостью и базовым направлением на корпусе ДУС.
Суть способа состоит в том, что с помощью кронштейна и поворотной установки устанавливают БИИМ в 3 различных фиксированных положения по зенитному углу (Θ=0°; Θ=90°), при этом установку углов зенита производят по сигналам акселерометров и в каждом из них разворачивают ИИМ на азимутальные углы, близкие к значениям 0°, 90°, 180°, 270°. Во всех фиксированных положениях определяют сигналы ДУС по двум компонентам вектора измеряемой угловой скорости вращения Земли, запоминают их, а потом складывают и вычитают результаты одноименных измерений по каждому измеряемому компоненту угловой скорости и по соответствующим алгоритмам определяют коэффициенты моделей угловых скоростей дрейфа, а также углы неточной установки осей чувствительности и вектора кинетического момента ДУС. При этом сигналы блока акселерометров используются для определения угла зенита и угла установки отклонителя.
Недостатком данного способа является то, что он не обеспечивает режимы калибровки масштабных коэффициентов, не полностью обеспечивает определение углов неточной установки измерительных осей однокомпонентных ДУС на основе волоконно-оптических, волновых твердотельных и других гироскопов, трех акселерометров, а также не позволяет определять углы непараллельности соответствующих одноименных измерительных осей ДУС и акселерометров.
Наиболее близким аналогом к заявляемому способу является способ калибровки датчиков угловой скорости бесплатформенного ИИМ [3], реализованный в известном широкодиапазонном стенде (например, УПГ-48), обеспечивающем приблизительно горизонтальное задание вектора угловой скорости с фиксированным направлением в пространстве. С помощью стендового оборудования вращают ИИМ последовательно вокруг трех приблизительно ортогональных осей ИИМ. Во время вращения записывают показания ИИМ по каналу акселерометров, показания ДУС. По сигналам акселерометров определяют угловую скорость ИИМ в базисе акселерометров. Идентифицируя математическую модель ДУС, определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, ориентацию осей чувствительности ДУС в ИИМ, матрицу, описывающую влияние линейного ускорения на показания ДУС.
Недостатком всех приведенных выше способов калибровки является необходимость предварительной компенсации смещений нулей. Это приводит к распространению ошибок компенсации смещений на ошибки идентификации углов неортогональности и масштабных коэффициентов. В силу высокой чувствительности оценок неортогональности к смещениям нулей их точность значительно падает.
Целью изобретения является повышение точности калибровки масштабных коэффициентов и углов неортогональности за счет инвариантности к текущим смещениям нулевых сигналов, т.е. за счет устранения вредного влияния остаточных ошибок компенсации нулей на ошибки определения неортогональности путем повышения информативности экспериментальных данных.
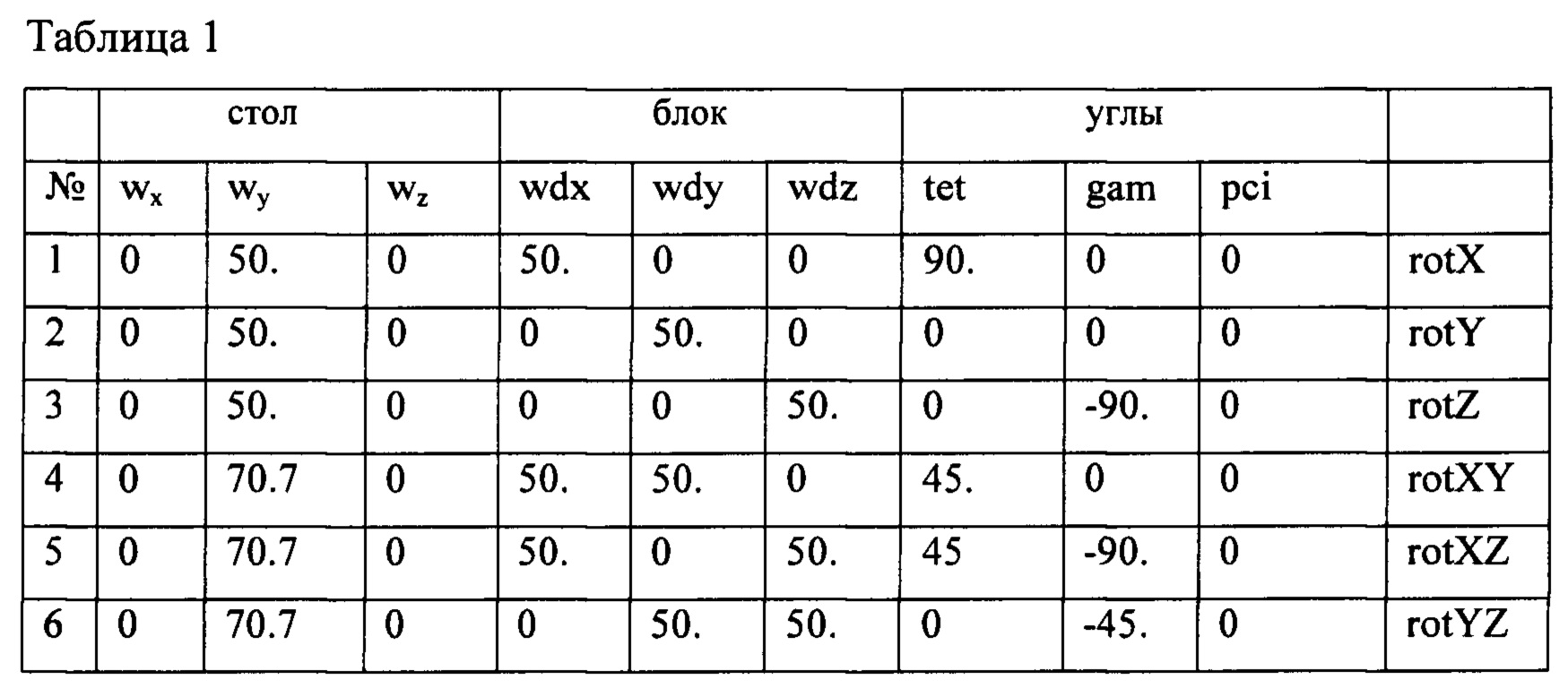
Поставленная цель достигается за счет того, что согласно заявленному способу определения коэффициентов калибровки интегрированного блока датчиков (ИБД), включающему начальную выставку платформы, статический эксперимент при неподвижном положении платформы, вращение с помощью стендового оборудования последовательно как минимум по двум непараллельным осям в базисе калибруемого ИБД, во время вращения записывают показания ИБД по каналу датчиков линейного ускорения (ДЛУ), показания датчиков угловой скорости (ДУС), идентифицируя математическую модель ДУС определяют нулевые сигналы ДУС, матрицу, описывающую масштабные коэффициенты, перекрестные связи, дополнительно осуществляют разработку программы автоматизации процесса калибровки, которая включает выполнение последовательности вращений и наклонов платформы на углы в соответствии с 6-ю указанными ниже в таблице 1 с экспериментами при длительности интервала времени каждого вращения и наклона порядка 3-4 минут.

Осуществляют обработку полученных данных включающих, выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона, вычисление средних значений кодов АЦП ДУС, дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола, для определения калибровочных коэффициентов оставляют три системы уравнений, каждая система содержит четыре уравнения и четыре неизвестных коэффициента. Для определения коэффициентов ДУС(х) - используют данные экспериментов 1, 4, 5, 6. Для определения коэффициентов ДУС(y) - используют данные экспериментов 2, 4, 5, 6. Для определения коэффициентов ДУС(z) - используют данные экспериментов 3, 4, 5, 6.
Уравнения приводят в матричный вид:

где Ax,Ay,Az - прямоугольные матрицы размерностью (4,4) - от трех систем уравнений для определения коэффициентов ДУС(х), ДУС(y) и ДУС(z),

оценки векторов коэффициентов осуществляют, используя следующие соотношения:

контроль калибровки по экспериментам вращений осуществляют путем оценивания средних значений угловых скоростей
 - номер эксперимента,
- номер эксперимента,  для контроля используют математические ожидания и СКО ошибок оценивания:
для контроля используют математические ожидания и СКО ошибок оценивания:


математические ожидания ошибок оценивания должны быть близки к нулю, СКО ошибок оценивания должны иметь порядок СКО шумов измерений.
Суть способа определения коэффициентов калибровки ИБД, использующего проведения вращательных экспериментов и проведение расчетов, излагается ниже.
Для реализации способа при вращении увеличивают число положений блока не менее чем до четырех, в которые должны входить положения с углами наклона по крену и по тангажу. Тогда оцениваемые матрицы-строки расширяются путем включения в них дополнительных компонент Cx,Cy,Cz, учитывающих суммарно некомпенсированные смещения нулей ДУС и ненулевые средние шумы измерений:
При таком способе обеспечивается инвариантность оценок неортогональности к оценкам смещений нулей ДУС и этап идентификации масштабных коэффициентов и углов неортогональности становится независимым от этапа статической калибровки. Установлено, что существуют наилучшие комбинации положений блока с углами наклона из набора {0,±45,±90,±135,±180} градусов, обеспечивающие максимальную точность идентификации углов неортогональности. Для реализации данного способа требуется точность позиционирования в рамках точности трехосного стола.
Новизна также обеспечена за счет оптимизации обработки положений блока ДУС, включая положения с наклоном по крену и тангажу, что особенно актуально для ЛА, маневрирующих с большими угловыми скоростями.
Для этого оценивают потенциальную точность определения углов неортогональности и масштабных коэффициентов триады ДУС по прямым измерениям угловых скоростей при вращении по осям X, Y, Z блока и формируют расчетные соотношения и осуществляют их применение для блока ИБД.
Калибровка ДУС на трехосном столе
I. Модель измерений.
Векторный выходной сигнал триады ДУС в блоке датчиков, установленном на поворотном стенде, описывают моделью [3]:
u=DS(ω)ω+u0+e, ω=ωс+ωg,
где u - вектор кодов АЦП в косоугольной СК измерительных осей ДУС,
ω - вектор проекций действующих угловых скоростей на оси прямоугольной СК блока,
ωс - вектор проекций угловых скоростей на оси СК блока за счет вращения платформы стола,
ωg - вектор проекций угловых скоростей за счет вращения Земли, и0 - вектор смещений нулей ДУС в единицах кода,
е - шум,
S - диагональная матрица масштабных коэффициентов:
D - матрица углов неортогональности, учитывающая повороты осей косоугольной СК измерительных осей ДУС относительно прямоугольной СК блока.
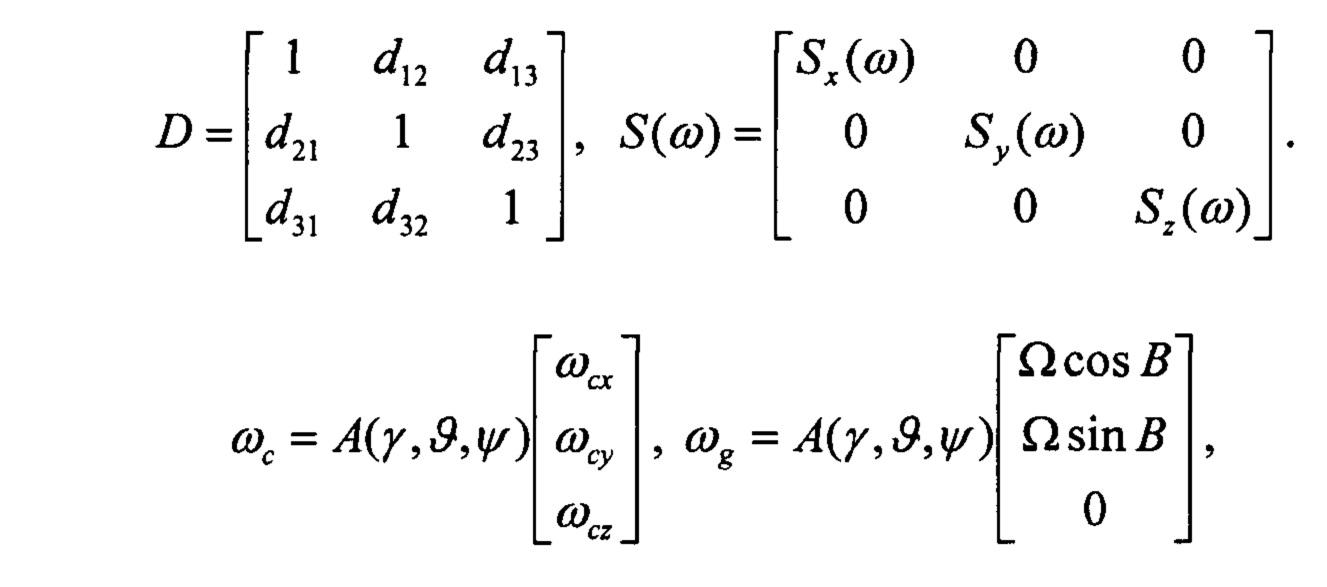
А(γ,ϑ,ψ) - матрица поворота блока,
γ,ϑ,ψ - углы поворота блока относительно горизонтального положения платформы стола, выставленной в азимуте на север. Углы измеряются угломерами платформы.
2. Калибровочные коэффициенты
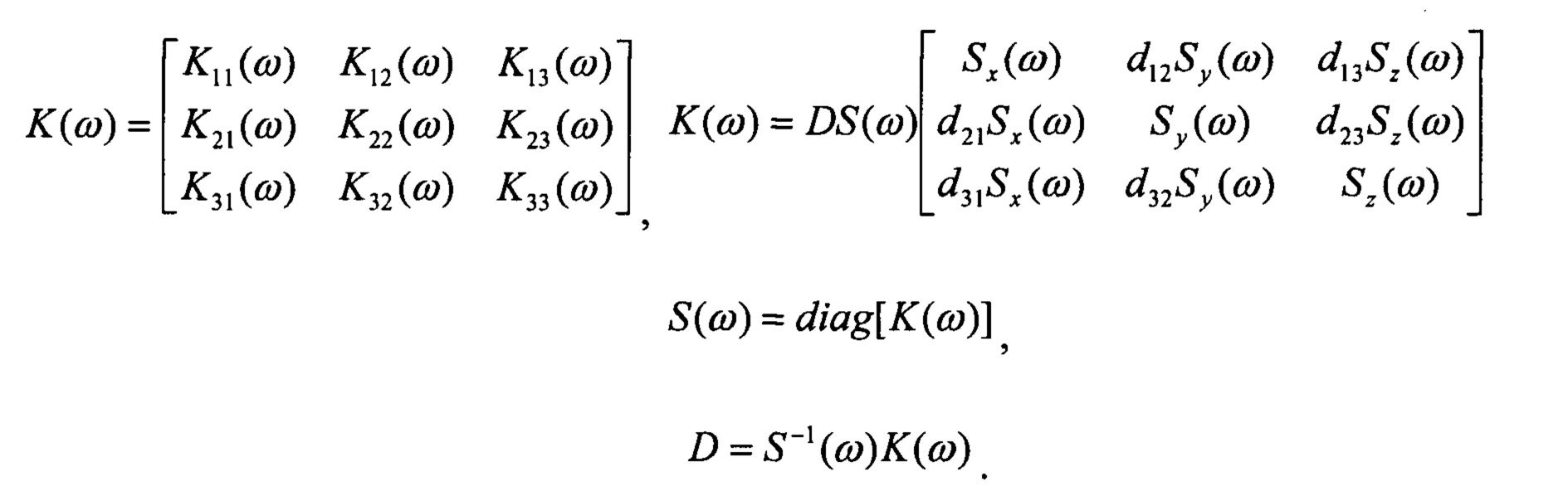
При калибровке для каждого тестового фиксированного значения со вычисляется матрица K(ω) совместно со смещением нуля u0.
Разложение матрицы K(ω) на матрицы D, S(ω) имеет вид:
K(ω)=DS(ω)
3. Вычисление угловых скоростей по кодам АЦП ДУС в СПО
 - матрица масштабов, интерполированная по текущим кодам АЦП.
- матрица масштабов, интерполированная по текущим кодам АЦП.
4. Требования к экспериментам
ωс=const, ωс>> ωg, ω=ωс.
Выполняют 6 экспериментов вращений, обеспечивающих одинаковые проекции угловой скорости по одной и по двум осям блока:

Платформу стола вращают по внешней (вертикальной) оси стола, т.к. она наиболее стабильна. Угловую скорость стола вычисляют дифференцированием показаний угломера.
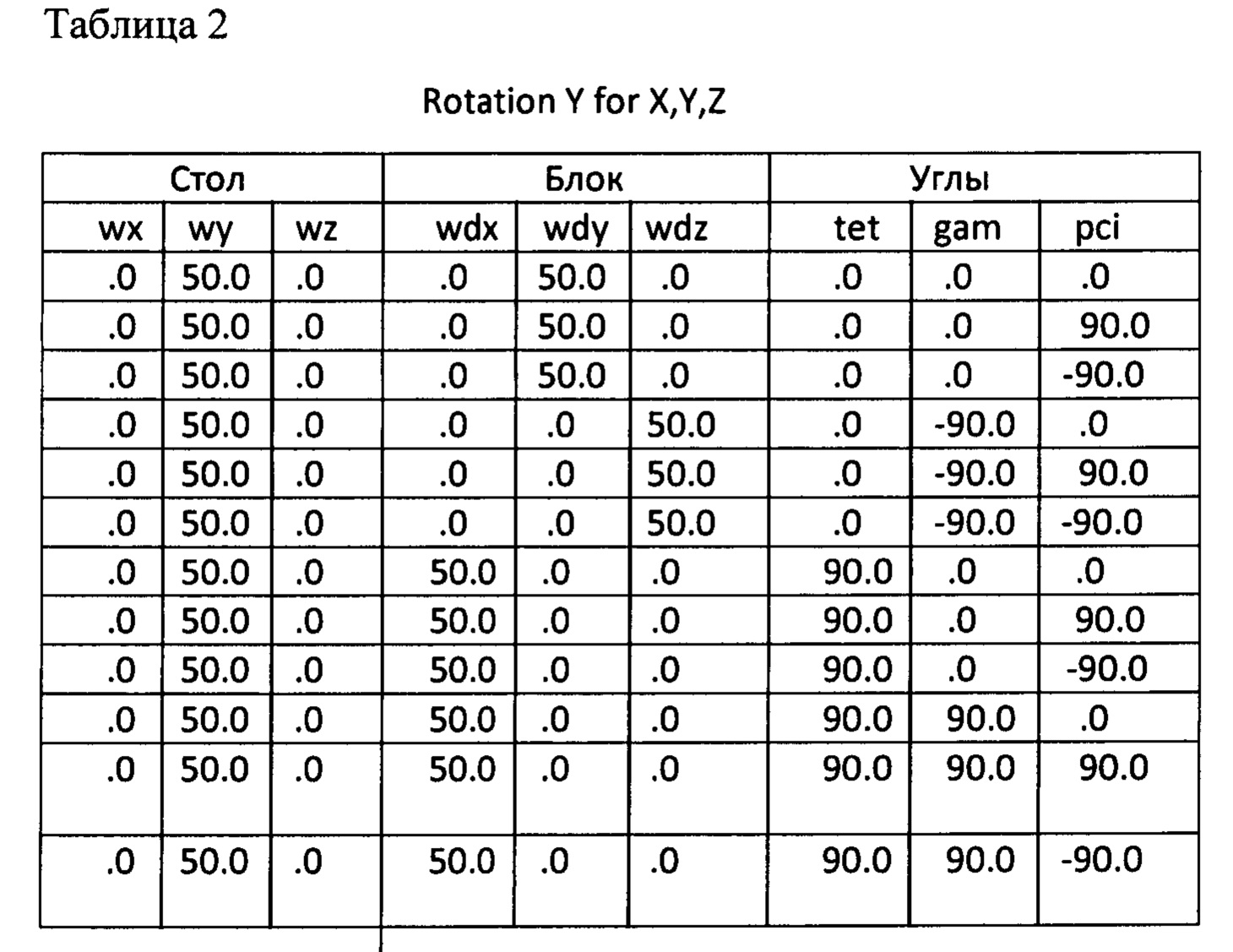
Необходимые проекции угловой скорости на оси блока обеспечивают за счет задания углов наклона (поворота) платформы по внутренней и средней осям. Оси платформы обозначим, как это принято для ЛА. Приведем пример для тестовой угловой скорости +50 град/с.
1. Варианты углов наклона для задания вращений блока раздельно по осям X, Y, Z (таблица 2).
2. Варианты углов наклона для задания вращений блока по осям XY, XZ, YZ. Стол вращаем с угловой скоростью  (таблица 3).
(таблица 3).

3. Выбирают следующие варианты для 6-ти экспериментов вращений для угловых скоростей блока 50 град/с (таблица 1).
5.Вычисление калибровочных коэффициентов по МНК
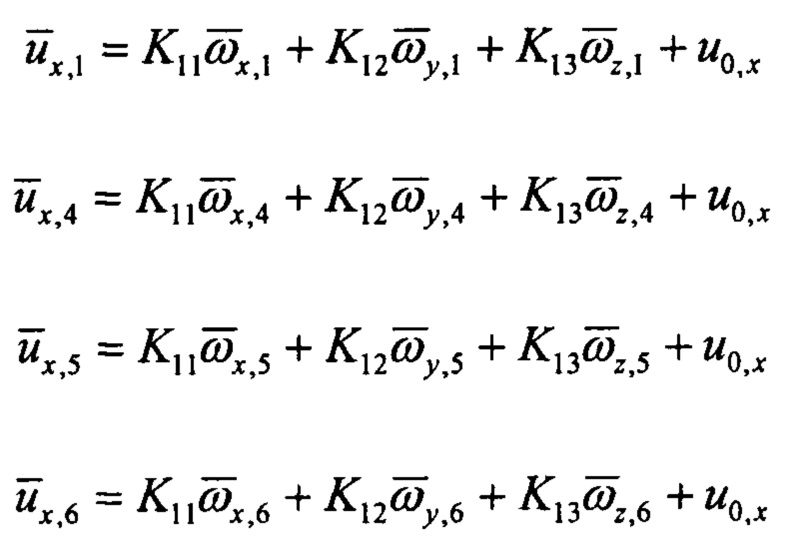
Уравнение для средних значений кодов АЦП и действующих угловых скоростей:

Составляют три системы уравнений. Каждая система содержит четыре уравнения и четыре неизвестных коэффициента.
1. Для определения коэффициентов ДУС(х) (по оси X) - используют данные экспериментов 1, 4, 5, 6:
2. Для определения коэффициентов ДУС(у) - используют данные экспериментов 2, 4, 5, 6:

3. Для определения коэффициентов ДУС(z) - используют данные экспериментов 3, 4, 5, 6:

Уравнения матричном виде:
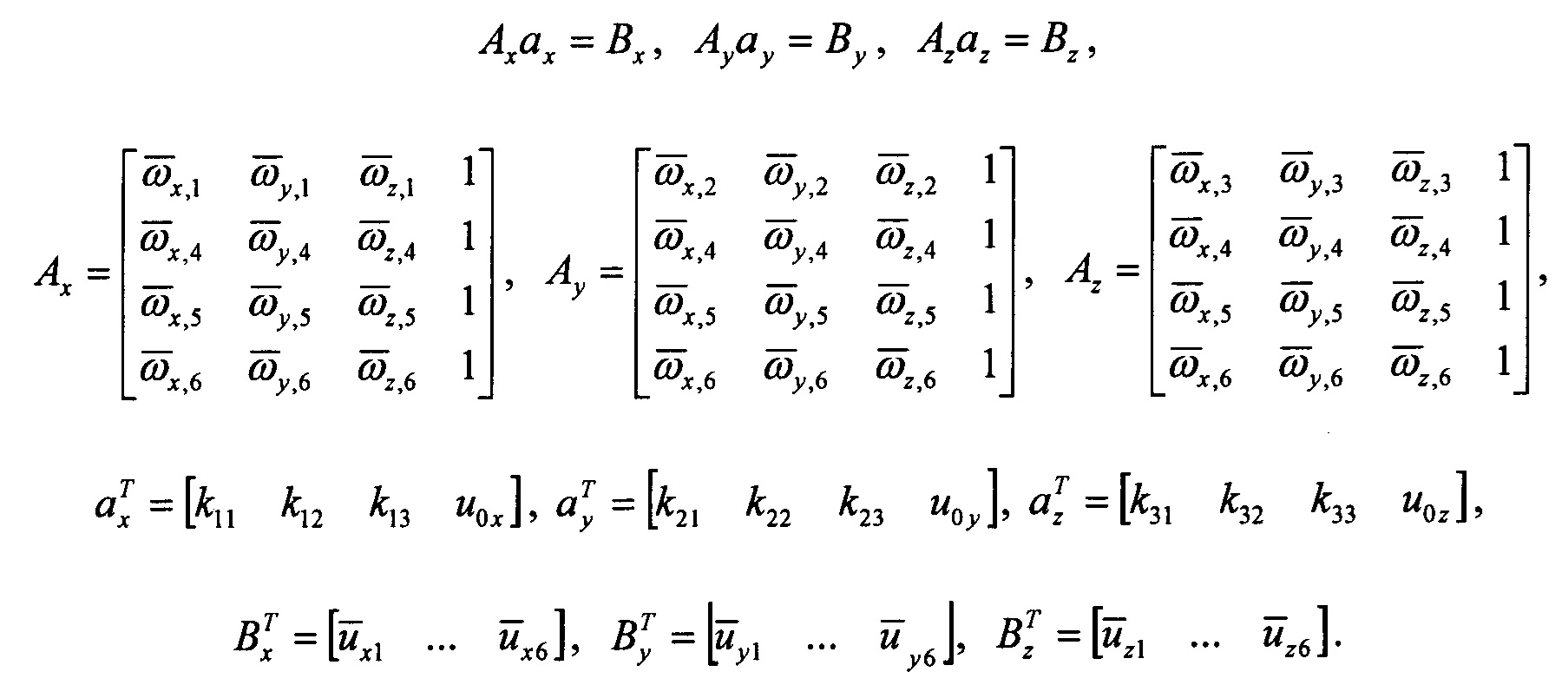
Оценки векторов коэффициентов осуществляют, используя следующие соотношения:

6. Контроль оценок
Далее определяют ошибки оценивания средних значений угловых скоростей:

Здесь j - номер эксперимента.
Для контроля используют математические ожидания и СКО ошибок оценивания:
Математические ожидания ошибок оценивания должны быть близки к нулю. СКО ошибок оценивания должны иметь порядок СКО шумов измерений. Таким образом, весь процесс калибровочных экспериментов автоматизирован. Для этого разрабатывают программу управления столом. Она должна предусматривать:
- начальную выставку платформы - для ДУС, «чувствующих» угловую скорость Земли.
- выполнение последовательности вращений и углов наклона платформы в соответствии с 6-ю указанными экспериментами при длительности интервала времени порядка 3-4 минут;
- регистрацию времени, кодов АЦП, показаний трех угломеров платформы, датчиков температуры блока и датчика температуры платформы;
- повторение этих действий для сетки значений угловой скорости.
- статический эксперимент при неподвижном положении платформы в течение порядка 10 минут.
Для полного диапазона температур эксперименты повторяются на сетке температур.
Расчетная часть
Для одного установившегося значения температуры расчетная часть включает
- выбор интервала времени длительностью порядка 2-3 минут с установившейся угловой скоростью и углами наклона;
- вычисление средних значений кодов АЦП ДУС;
- дифференцирование показаний угломеров и вычисление средних значений угловых скоростей платформы стола;
- вычисление средних значений показаний датчиков температуры;
- вычисление калибровочных коэффициентов (п. 5);
- контроль калибровки по экспериментам вращений (п. 6);
- контроль калибровки по статическому эксперименту;
- расчет интерполяционных таблиц по угловой скорости;
Для полного диапазона температур указанные расчеты дополняются следующими расчетами:
- калибровка датчиков температуры блока;
- формирование интерполяционных таблиц по температуре;
- контроль калибровки с учетом интерполяции по скорости и температуре.
Технический результат
По предлагаемому способу оценивание масштабов и углов неортогональности выполняется совместно со смещениями нулей. За счет этого обеспечивается инвариантность оценок масштабов и углов неортогональности по отношению к смещениям нулей ДУС, и, соответственно, повышение точности, что важно для ДУС низкой и средней точности с высоким уровнем нестабильности смещений нулей.
Данный способ обеспечивает оценивание масштабов для фиксированных значений угловых скоростей. Это позволяет использовать его для получения множества оценок для набора значений угловых скоростей и направлений вращения для формирования интерполяционных таблиц с целью учета нелинейных зависимостей масштабов от скорости и направления вращения.
Определены скорости вращения и углы поворота платформы стола для обеспечения постоянства и равенства проекций задаваемых угловых скоростей на оси блока.
Предложен необходимый набор экспериментов для расчета калибровочных коэффициентов.
Литература
1. Пат. US 2014372063 (A1) US, МПК7 G01P 21/00. Quick calibration method for inertial measurement unit / NIU XIAOJI [CN] и др.; заявитель UNIV WUHAN [CN] - № US 201314239145; заявл. 05.03.2013; опубл. 18.12.2014.
2. РФ №2269813 Способ калибровки параметров бесплатформенного инерциального измерительного модуля, / Синеев А.И. и др. Патентообладатель: ЗАО Тазприборавтоматикасервис", опубл. 10.02.2006.
3. Волынский Д.В., Драницына Е.В., Одинцов А.А., Унтилов А.А. Калибровка волоконно-оптических гироскопов в составе бескарданных инерциальных измерительных модулей. Гироскопия и навигация №2, 2012, с. 56-68.






Корректор угла крена для уточнения траектории летательного аппарата
Способ идентификации нелинейных систем
Гибридный способ измерения углового положения
Способ повышения точности калибровки блока микромеханических датчиков угловой скорости
Гибридный датчик измерения углового положения
Способ коррекции углов ориентации бинс
Способ построения маршрута маловысотного полета на виртуальном полигоне
Способ формирования псевдослучайной двоичной последовательности для однокоординатных датчиков перемещений
Способ определения углов пространственной ориентации
Система для разработки интеллектуального датчика
Корректор угла крена для уточнения траектории летательного аппарата
Малогабаритная адаптивная курсовертикаль
Способ идентификации нелинейных систем
Гибридный способ измерения углового положения
Способ повышения точности калибровки блока микромеханических датчиков угловой скорости
Гибридный датчик измерения углового положения

