Результат интеллектуальной деятельности: РОБОТ НАНЕСЕНИЯ ПОКРЫТИЯ
Вид РИД
Изобретение
Изобретение относится к роботу нанесения покрытия для покрытия конструктивных элементов, в частности к лакировочному роботу для лакирования конструктивных элементов кузова автомобиля.
Из уровня техники (например, из DE 10 2013 109 867 A1, EP 0 511 977 B1, EP 2 213 425 B1) известны роботы нанесения покрытия, которые имеют в целом семь подвижных осей, что создает условия для больших возможностей движения. Так эти известные роботы нанесения покрытия имеют основание робота, поворотный орган робота, проксимальную руку робота ("рука 1"), дистальную руку робота ("рука 2") и многоосную ось руки робота. Проксимальная рука робота разделена при этом на два элемента руки, которые могут друг относительно друга поворачиваться вокруг продольной оси проксимальной руки робота. При этом система проведения с линиями текучей среды и электролиниями проходит от основания робота до присоединительного фланца оси руки робота, причем система проведения проходит в области проксимальной руки робота за пределами проксимальной руки робота, то есть за пределами оси между обоими элементами проксимальной руки робота. Поворотная опора между обоими поворачиваемыми друг относительно друга элементами проксимальной руки робота обходится таким образом системой проведения на внешней стороне проксимальной руки робота.
Недостатком у этих известных роботов нанесения покрытия является проведение системы проведения, которое во время эксплуатации приводит к различным проблемам. С одной стороны система проведения выдается за внешний контур робота нанесения покрытия, что нежелательно. С другой стороны система проведения также при этом механически сильно нагружается.
В отношении уровня техники следует также сделать ссылку на DE 100 10 615 A1, US 2006/0294628 A1, US 2013/0260606 A1, DE 694 02 405 T2, DE 10 2004 040 162 A1, DE 10 2010 024 260 A1, DE 101 39 088 A1, DE 10 2009 012 140 A1, DE 20 2013 105 910 U1, DE 20 2013 104 544 U1, US 2008/0223170 A1, US 2016/0089797 A1, WO 2012/028197 A1.
Исходя из этого, в основе изобретения лежит задача создать улучшенный соответствующим образом робот нанесения покрытия.
Эта задача решается с помощью соответствующего изобретению робота нанесения покрытия согласно основному независимому пункту формулы изобретения.
Соответствующий изобретению робот нанесения покрытия, прежде всего, имеет в соответствии с уровнем техники основание робота, которое смонтировано предпочтительно неподвижно.
Сверх этого, соответствующий изобретению робот нанесения покрытия имеет в соответствии с уровнем техники поворотный орган робота, который установлен на основании робота и может поворачиваться относительно основания робота вокруг первой оси.
Далее соответствующий изобретению робот нанесения покрытия имеет в соответствии с уровнем техники проксимальную руку робота, которая обозначается согласно общепринятой специальной терминологии также как "рука 1", причем проксимальная рука робота установлена на поворотном органе робота и может поворачиваться относительно поворотного органа робота вокруг второй оси.
Проксимальная рука робота ("рука 1") состоит согласно изобретению из двух элементов руки, которые при помощи первого опорного кольца могут поворачиваться друг относительно друга вокруг третьей оси, причем третья ось ориентирована по существу вдоль продольной оси проксимальной руки робота. Поворотное движение обоих элементов проксимальной руки робота друг относительно друга осуществляется таким образом по существу вокруг продольной оси проксимальной руки робота.
Здесь, однако, следует отметить, что в рамках изобретения не является необходимым, чтобы третья ось была ориентирована точно параллельно к продольной оси проксимальной руки робота. Наоборот, в рамках изобретения достаточно, если третья ось ориентирована по существу параллельно к продольной оси проксимальной руки робота, причем возможны, например, угловые отклонения в ±20°, ±10° или ±5°. Кроме того, в этой связи следует отметить, что проксимальная рука робота может быть также немного согнута или изогнута.
Сверх этого, соответствующий изобретению робот нанесения покрытия имеет дистальную руку робота, которая обозначается согласно общепринятой специальной терминологии также как "рука 2", причем дистальная рука робота установлена на проксимальной руке робота и может поворачиваться относительно проксимальной руки робота вокруг четвертой оси.
На дистальной руке робота установлена в соответствии с уровнем техники ось руки робота, которая имеет несколько подвижных осей, как это по существу известно из уровня техники. В одном предпочтительном примере осуществления изобретения ось руки робота имеет три подвижные оси. Однако, в рамках изобретения, например, также возможно, что ось руки робота имеет две подвижные оси или четыре подвижные оси.
На дистальном конце оси руки робота находится присоединительный фланец для присоединения устройства нанесения покрытия, как например ротационного распылителя.
Далее соответствующий изобретению робот нанесения покрытия имеет в соответствии с уровнем техники систему проведения, которая проведена от основания робота до присоединительного фланца для устройства нанесения покрытия и служит для снабжения устройства нанесения покрытия.
Соответствующий изобретению робот нанесения покрытия отличается теперь тем, что система проведения проведена сквозь первое опорное кольцо между обоими элементами проксимальной руки робота. Это означает, что система проведения проходит в этой области внутри проксимальной руки робота и потому не выдается наружу за внешний контур робота нанесения покрытия.
В предпочтительном примере осуществления изобретения первая ось между основанием робота и поворотным органом робота и вторая ось между поворотным органом робота и проксимальной рукой робота являются скрещивающимися в математическом смысле. Это означает, что эти обе оси не пересекаются и не проходят параллельно друг к другу. Первая ось и вторая ось расположены предпочтительно при этом с межосевым расстоянием (в математическом смысле с общим перпендикуляром) в диапазоне 10-55 см, 20-25 см или 25-35 см, причем межосевое расстояние в 30 см между первой осью и второй осью оказалось предпочтительным.
Кроме того, следует отметить, что оба поворачиваемых друг относительно друга элемента проксимальной руки робота ("руки 1") могут поворачиваться предпочтительно в диапазоне угла поворота, по меньшей мере, 90°, 135°, 180°, 225° или даже, по меньшей мере, 240°, для того чтобы создавать условия для максимально возможного диапазона разновидностей движения.
В предпочтительном примере осуществления изобретения первая ось между основанием робота и поворотным органом робота проходит напротив предпочтительно параллельно к третьей оси робота между обоими поворачиваемыми элементами проксимальной руки робота, если проксимальная рука робота ориентирована вертикально.
Однако, альтернативно существует также возможность того, что первая ось и третья ось пересекаются, например, под углом 1°-45°, 2°-35°, 5°-25° или 10°-20°.
В предпочтительном примере осуществления изобретения поворотный орган робота соединен вторым опорным кольцом с возможностью поворота с основанием робота. Система проведения выходит при этом из внутреннего пространства основания робота и затем проводится за пределами второго опорного кольца и за пределами основания робота к поворотному органу робота. При этом система проведения между основанием робота и поворотным органом робота образует предпочтительно изогнутый участок с изгибом примерно в 90°.
Поворотный орган робота имеет при этом предпочтительно два боковых держателя, между которыми смонтирована с возможностью поворота проксимальная рука робота. Система проведения, исходя из основания робота, проведена при этом снизу по существу вертикально вверх между обоими держателями поворотного органа робота и входит там в проксимальную руку робота.
За первым опорным кольцом между обоими поворачиваемыми элементами проксимальной руки робота система проведения затем предпочтительно снова покидает проксимальную руку робота наружу и проведена после этого за пределами робота нанесения покрытия к дистальной руке робота. Система проведения, исходя в этом случае из проксимальной руки робота, входит снаружи снова в дистальную руку робота.
Наконец, система проведения проводится затем внутри дистальной руки робота и оси руки робота к присоединительному фланцу для устройства нанесения покрытия (например, ротационного распылителя).
Система проведения проведена от основания робота до поворотного органа робота предпочтительно таким образом, что система проведения пересекает, в частности под прямым углом, вторую ось, что оказалось предпочтительным.
В отношении примененных в рамках этого описания обозначений положения "перед" и "за" следует отметить, что эти обозначения положения касаются кинематической последовательности отдельных компонентов робота вдоль кинематики серийного робота. Основание робота расположено таким образом в этом смысле перед руками робота, в то время как ось руки робота находится за руками робота.
Предпочтительно система проведения включает в себя электролинии и линии текучей среды. Линии текучей среды могут включать в себя, например, линию приводного воздуха, линию воздуха торможения, линию управляющего воздуха, линию воздуха опоры или линию краски для лака. Электролиния может напротив включать в себя, например, высоковольтную линию для электростатической зарядки покровного средства или сенсорную линию для опроса датчика в устройстве нанесения покрытия, что можно назвать лишь в качестве некоторых примеров.
Выше уже было указано, что система проведения проведена сквозь первое опорное кольцо между поворачиваемыми элементами проксимальной руки робота. В предпочтительном примере осуществления первое опорное кольцо имеет два прохода линии, а именно первый проход линии для электролиний и отделенный от него второй проход линии для линий текучей среды.
Первый проход линии для электролиний расположен при этом в первом опорном кольце предпочтительно по центру, в то время как второй проход линии для линий текучей среды расположен в первом опорном кольце предпочтительно эксцентрично.
При расположении электродвигателей в роботе нанесения покрытия требуется на практике взрывозащитный кожух, который предусматривает, как правило, воздухообмен между внутренними пространствами обоих элементов проксимальной руки робота. Первый проход линии для электролиний выполнен поэтому предпочтительно таким образом, что создаются условия для такого воздухообмена.
В отношении кинематики робота в целом следует отметить, что поворотный орган робота расположен предпочтительно на верхней стороне основания робота. Однако, в рамках изобретения существует принципиально также возможность, что поворотный орган робота расположен на нижней стороне основания робота или сбоку рядом с основанием робота.
Далее следует отметить, что первая ось между поворотным органом робота и основанием робота ориентирована предпочтительно по существу вертикально. Однако в рамках изобретения существует также возможность, что первая ось ориентирована горизонтально или под наклоном.
Вторая ось между проксимальной рукой робота и поворотным органом робота ориентирована напротив в предпочтительном примере осуществления по существу горизонтально. Однако в рамках изобретения существует также возможность того, что вторая ось ориентирована по существу вертикально или под наклоном.
В предпочтительном примере осуществления изобретения первая ось ориентирована таким образом вертикально, в то время как вторая ось ориентирована горизонтально.
Кроме того, в отношении основания робота следует отметить, что основание робота расположено предпочтительно неподвижно (стационарно), например, на стенке лакировочной кабины, на монтажной колонне или на монтажной раме. Альтернативно существует, однако, также возможность, что основание робота установлено на ходовом рельсе и может перемещаться вдоль ходового рельса.
В предпочтительном примере осуществления изобретения первое опорное кольцо между обоими поворотными элементами проксимальной руки робота является составной частью механизма передачи с полым валом и приводится в движение механизмом передачи с зубчатым зацеплением (с передвижными шестернями). Предпочтительно механизм передачи с зубчатым зацеплением прифланцован в радиальном направлении снаружи к механизму передачи с полым валом, причем выходной вал механизма передачи с зубчатым зацеплением проходит параллельно к третьей оси.
Механизм передачи с зубчатым зацеплением расположен предпочтительно внутри проксимальной руки робота, например, внутри дистального элемента проксимальной руки робота. Предпочтительно проксимальная рука робота имеет вследствие этого взрывозащитный кожух, в частности в области дистального элемента проксимальной руки робота, где расположен механизм передачи с зубчатым зацеплением.
У соответствующего изобретению робота нанесения покрытия на дистальной руке робота или внутри дистальной руки робота могут быть также смонтированы имеющие техническое отношение к нанесению покрытия конструктивные элементы, как например устройство смены краски, дозирующий насос, клапаны покровного средства, регулятор давления краски или высоковольтный генератор, что можно назвать лишь в качестве некоторых примеров. Для монтажа устройства смены краски в дистальной руке робота наиболее подходит линейное устройство смены краски, которое известно, например, из DE 10 2008 015 228 A1.
Другие предпочтительные усовершенствования изобретения отмечены в зависимых пунктах формулы изобретения или разъясняются в дальнейшем более подробно вместе с описанием предпочтительного примера осуществления изобретения при помощи чертежей. На чертежах показано:
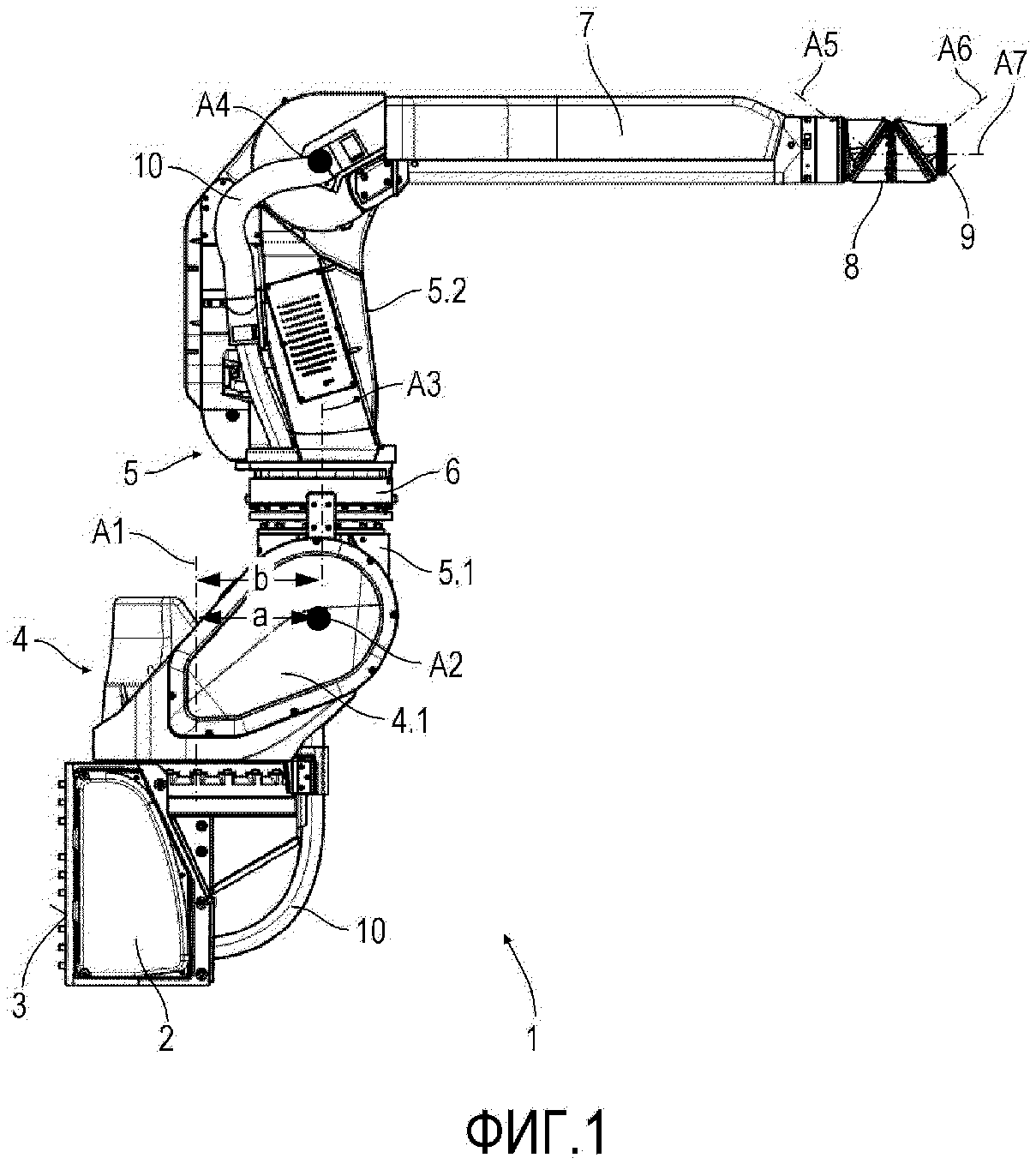
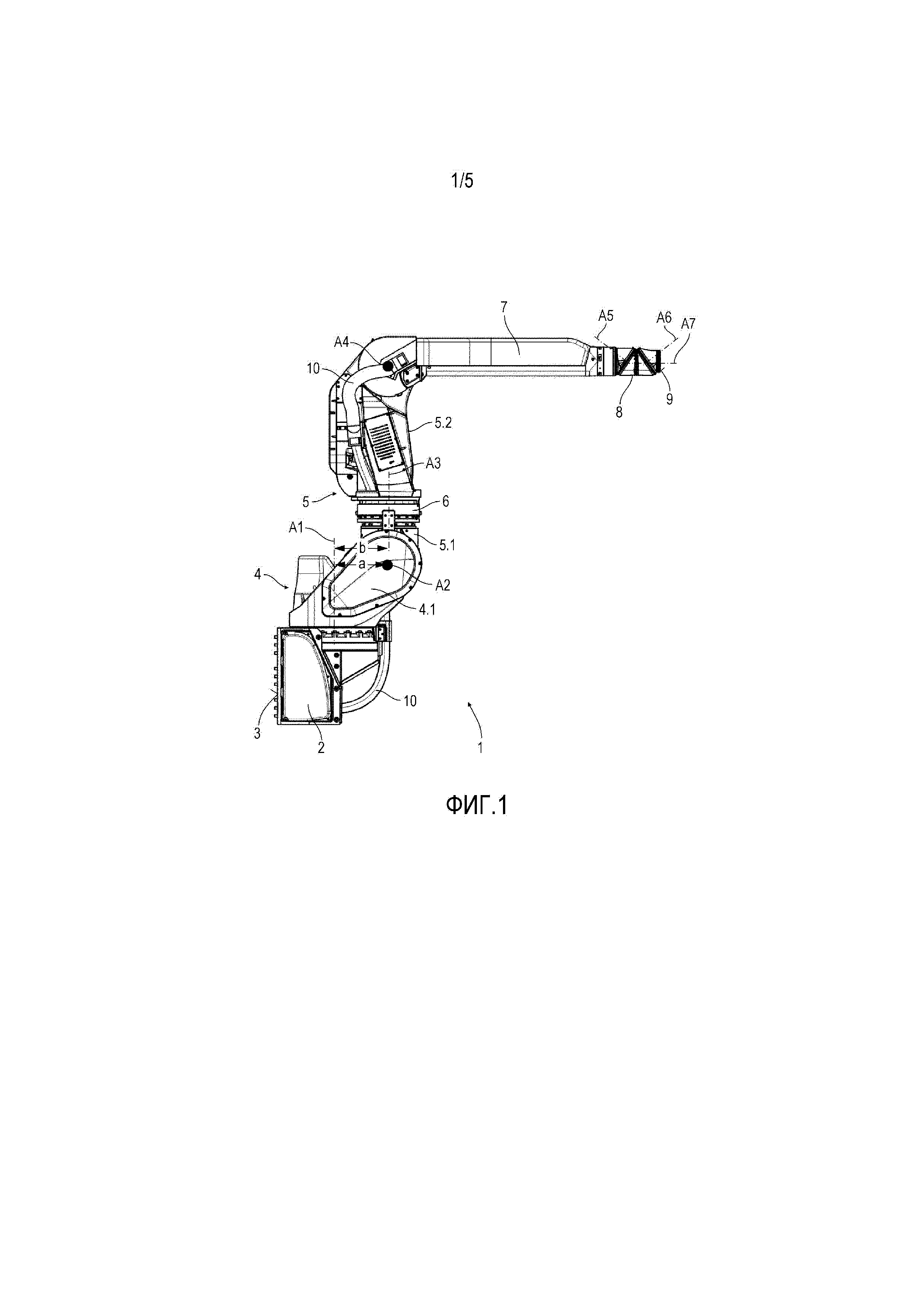
фиг.1 - вид сбоку соответствующего изобретению лакировочного робота;
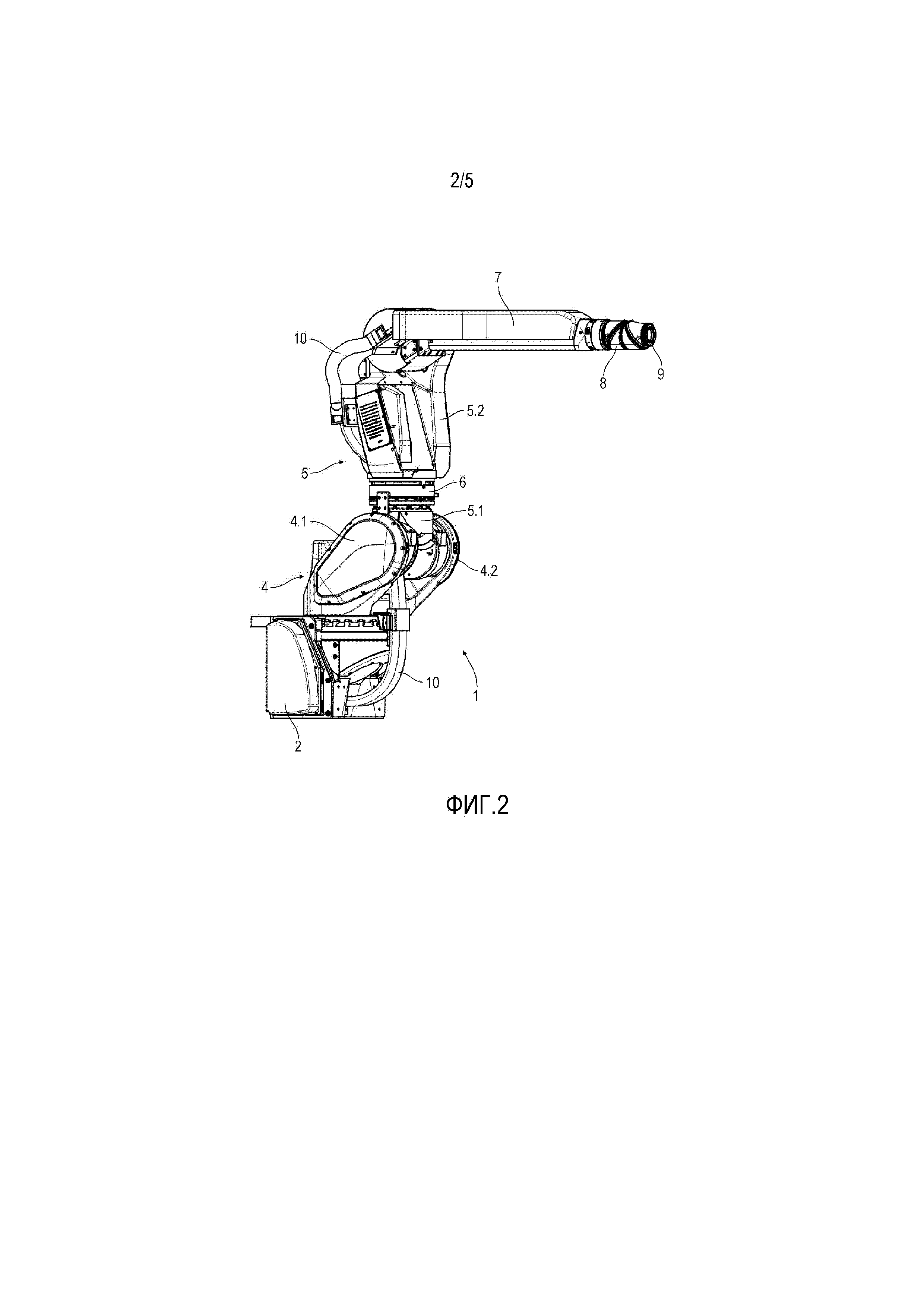
фиг.2 - вид в перспективе лакировочного робота с фиг.1;
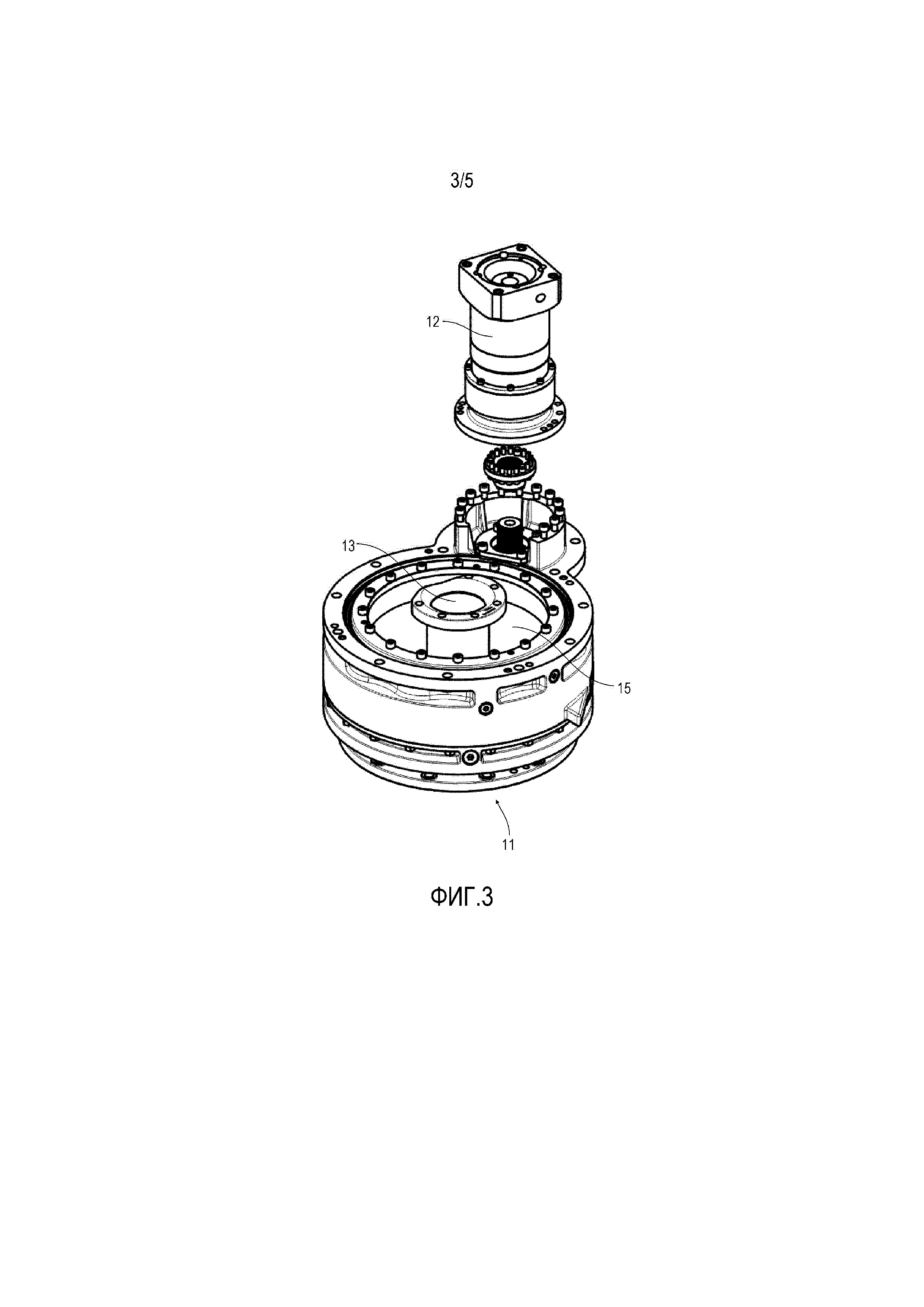
фиг.3 - механизм передачи с полым валом лакировочного робота с фиг.1 и 2 с механизмом передачи с зубчатым зацеплением;
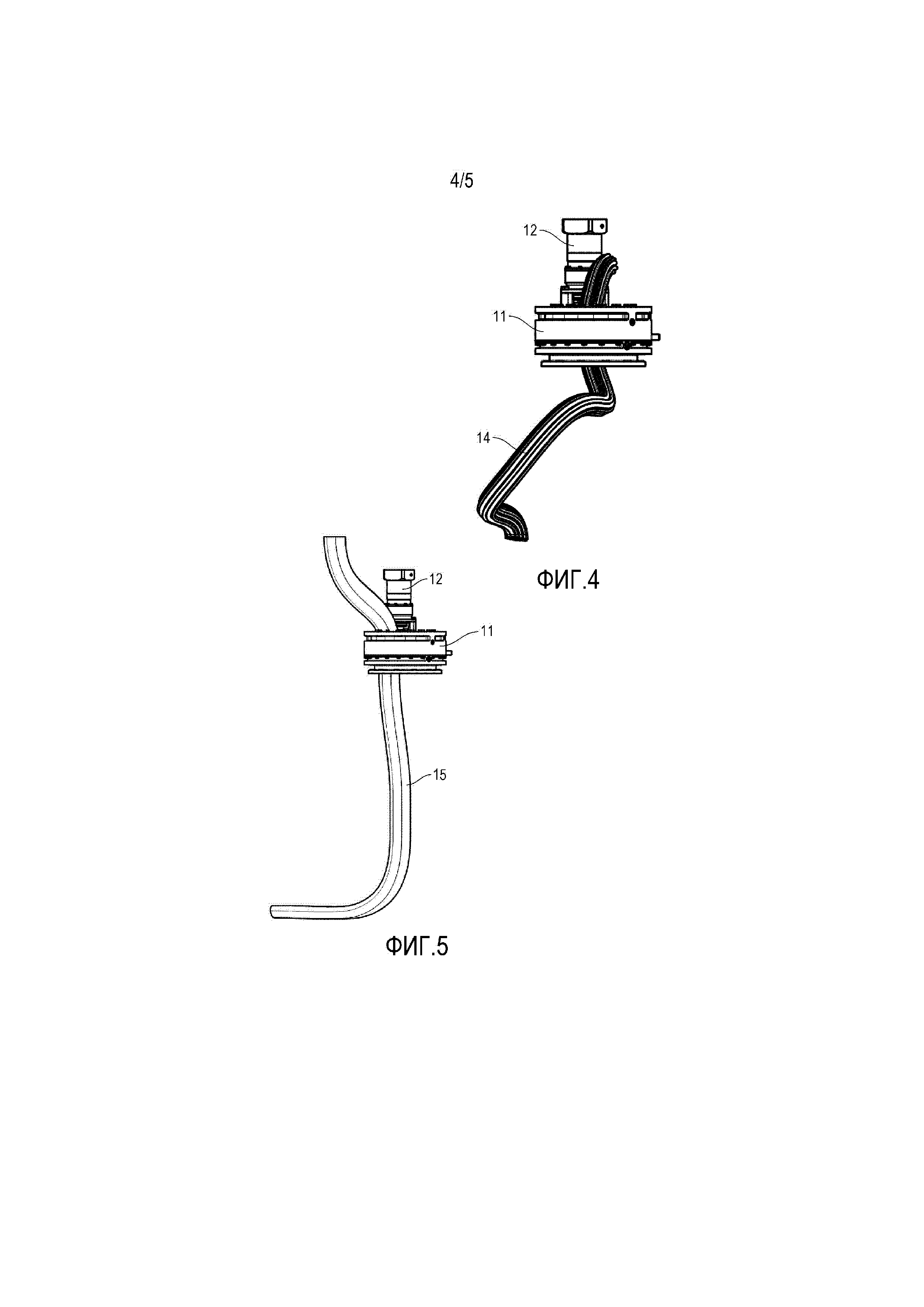
фиг.4 - механизм передачи с полым валом с фиг.3 с электролиниями, которые проведены сквозь механизм передачи с полым валом;
фиг.5 - механизм передачи с полым валом с фиг.3 с линиями текучей среды, которые проведены сквозь механизм передачи с полым валом; а также
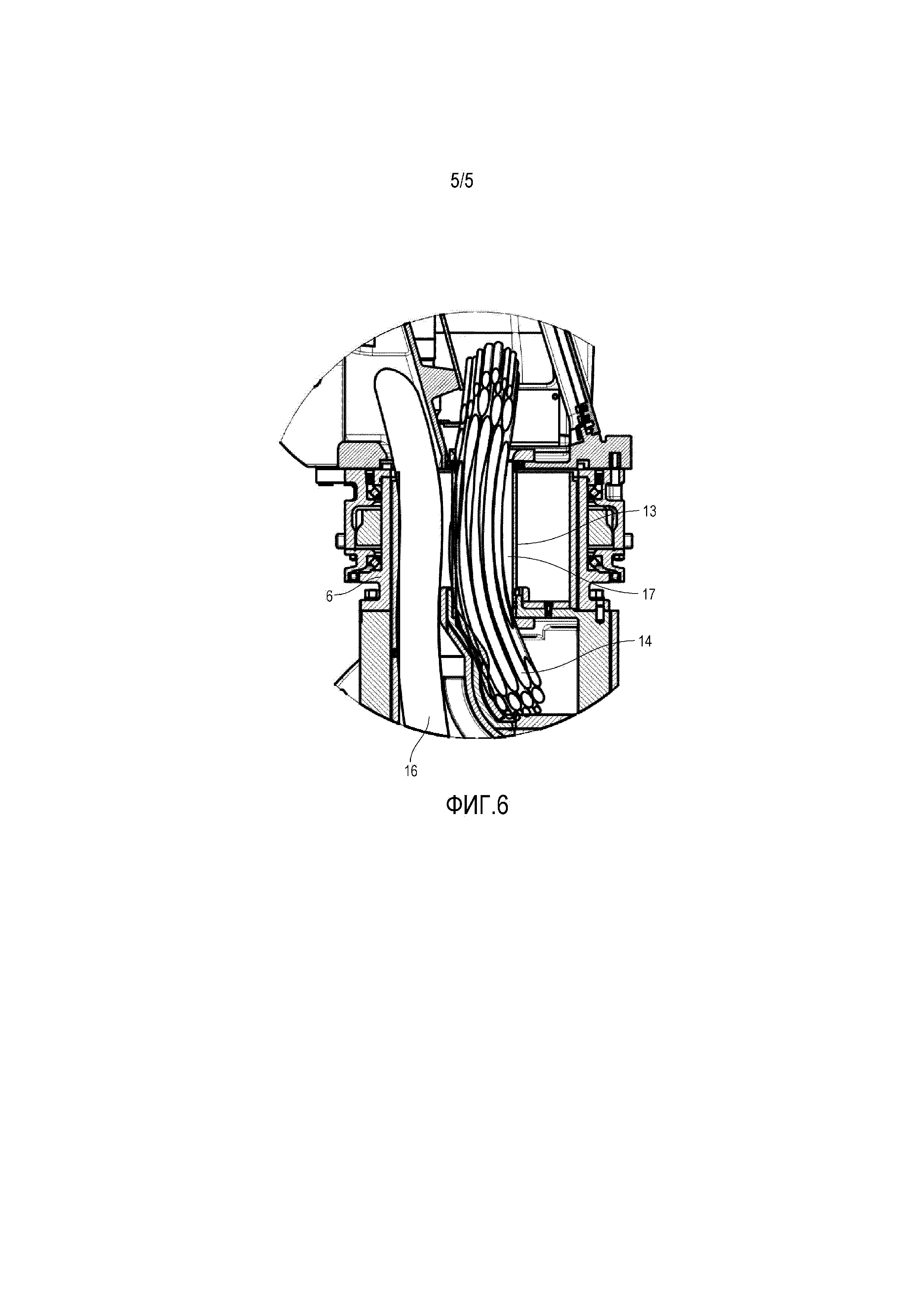
фиг.6 - вид в поперечном разрезе механизма передачи с полым валом с электролиниями и линиями текучей среды.
Фигуры показывают разные виды соответствующего изобретению лакировочного робота 1, который может использоваться, например, в лакировальной установке для лакирования конструктивных элементов кузова автомобиля.
Лакировочный робот 1, прежде всего, имеет основание 2 робота, которое при помощи своего монтажного фланца 3 неподвижно смонтировано, например, на боковой стенке лакировочной кабины, на монтажной раме или на монтажной колонне.
На верхней стороне основания робота расположен поворотный орган 4 робота, который может поворачиваться относительно основания 2 робота вокруг вертикальной оси A1.
Поворотный орган 4 робота имеет два боковых держателя 4.1, 4.2, между которыми расположена с возможностью поворота проксимальная рука 5 робота ("рука 1"), причем проксимальная рука 5 робота может поворачиваться относительно поворотного органа 4 робота вокруг горизонтальной второй оси A2.
Обе оси A1 и A2 являются при этом в математическом смысле скрещивающимися, то есть оси A1 и A2 не пересекаются и проходят не параллельно друг к другу. При этом оси A1 и A2 расположены с межосевым расстоянием (в математическом смысле с общим перпендикуляром) a=30 см.
Проксимальная рука 5 робота состоит из двух элементов 5.1, 5.2 руки, которые могут поворачиваться друг относительно друга вокруг оси A3, причем ось A3 совпадает по существу с продольной осью проксимальной руки 5 робота. Для этого оба элемента 5.1, 5.2 проксимальной руки 5 робота соединены друг с другом опорным кольцом 6, причем опорное кольцо 6 делает возможным поворот обоих элементов 5.1, 5.2 руки друг относительно друга.
При вертикальной ориентации проксимальной руки 5 робота - как изображено на фиг.1 - обе оси A1 и A3 расположены с межосевым расстоянием b=30 см.
Далее лакировочный робот 1 имеет дистальную руку 7 робота, которая в общепринятой специальной терминологии робототехники обозначается также как "рука 2". Дистальная рука 7 робота установлена на конце проксимальной руки 5 робота и может поворачиваться вокруг оси A4.
В дистальной руке 7 робота могут быть установлены имеющие техническое отношение к нанесению покрытия конструктивные элементы, как например устройство смены краски (например, линейное устройство смены краски), дозирующий насос, регулятор давления краски, клапаны покровного средства или высоковольтный генератор.
Дистальная рука 7 робота несет на своем конце обычную ось 8 руки робота с тремя дальнейшими подвижными осями A5, A6, A7.
На своем свободном конце ось 8 руки робота имеет присоединительный фланец 9 для монтажа устройства нанесения покрытия (например, ротационного распылителя).
От основания 2 робота до присоединительного фланца 9 оси 8 руки робота проведена при этом система 10 проведения, для того чтобы снабжать присоединенное устройство нанесения покрытия.
Система 10 проведения выходит сначала в горизонтальном направлении из основания 2 робота и затем проведена под углом в 90° вверх, где система проведения проведена затем между обоими держателями 4.1, 4.2 поворотного органа 4 робота. Там система 10 проведения входит затем в элемент 5.1 проксимальной руки 5 робота. Система проведения проведена затем сквозь опорное кольцо 6 между обоими поворачиваемыми элементами 5.1, 5.2 руки и покидает затем элемент 5.2 руки снова наружу. Система 10 проведения входит затем в области оси A4 снова в дистальную руку 7 робота и проводится затем внутри дистальной руки 7 робота и оси 8 руки робота до присоединительного фланца 9.
Фиг.3 показывает механизм 11 передачи с полым валом, который расположен между обоими поворачиваемыми элементами 5.1, 5.2 проксимальной руки 5 робота и который включает в себя опорное кольцо 6. К механизму 11 передачи с полым валом в радиальном направлении снаружи прифланцован механизм 12 передачи с зубчатым зацеплением, для того чтобы приводить в движение механизм 11 передачи с полым валом и вследствие этого поворачивать оба элемента 5.1, 5.2 проксимальной руки 5 робота друг относительно друга.
В механизме передачи с полым валом находится по центру первый проход 13 линии для приема электролиний 14 (см. фиг.4).
Далее в механизме 11 передачи с полым валом эксцентрично расположен дальнейший проход 15 линии для линий 16 текучей среды (см. фиг.5).
Далее из вида в поперечном разрезе на фиг.6 видно, что проход 13 линии для электролиний 14 оставляет воздушный зазор 17, для того чтобы делать возможным воздухообмен между внутренними пространствами элементов 5.1, 5.2 проксимальной руки 5 робота, что важно в рамках взрывозащитной капсюляции.
Соответствующий изобретению лакировочный робот 1 имеет следующие преимущества:
- Подвижность семиосного лакировочного робота 1 больше, чем у обычного шестиосного лакировочного робота без оси A3.
- Семиосный лакировочный робот 1 может программироваться так же, как и обычный шестиосный лакировочный робот. Однако, благодаря дополнительной оси A3 лакировочный робот 1 может избегать препятствий при такой же форме траектории, соответственно, оптимально в отношении процесса дополнительно перемещать и позиционировать руки и простые шарниры, не покидая необходимой траектории и ориентации.
- Система 10 проведения проходит по существу в так называемом нейтральном волокне оси робота и потому при движении робота механически нагружается лишь в минимальной степени.
- Линии 16 текучей среды пространственно отделены от электролиний 14 и механизма 12 передачи с зубчатым зацеплением.
- Система 10 проведения может содержать более чем 50 линий 16 текучей среды для лака, причем отдельные линии текучей среды могут иметь наружный диаметр 9 мм.
- Система 10 проведения отличается мягкими переходами и защищена от перегибов, истирания и деформаций.
- Семиосный лакировочный робот 1 делает возможными по сравнению с обычными шестиосными лакировочными роботами большие углы поворота в основных осях и осях руки.
- У лакировочного робота 1 возможные негерметичности линий 16 текучей среды могут простым образом устраняться посредством замены дефектной системы 10 проведения.
- При возможных негерметичностях в линиях 16 текучей среды утечка стекает ввиду силы тяжести вниз в лакировочную кабину.
- Система 10 проведения не выступает или практически не выступает за внешний контур лакировочного робота 1 и имеет очень короткое монтажное расстояние.
- Семиосный лакировочный робот 1 конструктивно аналогичен обычному шестиосному лакировочному роботу и делает возможными такие же технологические функции и техники нанесения покрытия.
- У лакировочного робота 1 имеют место такие же изоляционные расстояния на дистальной руке 7 робота, что важно при электростатической зарядке покровного средства.
- Семиосный лакировочный робот 1 имеет такую же несущую способность, как и обычный шестиосный лакировочный робот.
- Семиосный лакировочный робот 1 может монтироваться так же, как и обычные шестиосные лакировочные роботы, то есть, например, неподвижно или с возможностью перемещения вдоль ходового рельса.
- Семиосный лакировочный робот 1 имеет с обычным шестиосным лакировочным роботом много одинаковых элементов, что при параллельном изготовлении семиосных лакировочных роботов 1 и шестиосных лакировочных роботов уменьшает производственные расходы, так как возможны большие серии одинаковых элементов.
Изобретение не ограничено вышеописанным предпочтительным примером осуществления. Наоборот, возможно множество вариантов и модификаций, которые равным образом используют идею изобретения и входят потому в объем защиты. В частности, изобретение истребует также защиты для предмета и признаков зависимых пунктов формулы изобретения вне зависимости от пунктов, на которые они в каждом случае ссылаются.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 лакировочный робот
2 основание робота
3 монтажный фланец основания робота
4 поворотный орган робота
4.1, 4.2 держатели поворотного органа робота
5 проксимальная рука робота
5.1 проксимальный элемент проксимальной руки робота
5.2 дистальный элемент проксимальной руки робота
6 опорное кольцо между элементами проксимальной руки робота
7 дистальная рука робота
8 ось руки робота
9 присоединительный фланец оси руки робота
10 система проведения
11 механизм передачи с полым валом
12 механизм передачи с зубчатым зацеплением
13 центральный проход линии для электролиний
14 электролинии
15 эксцентричный проход линии для линий текучей среды
16 линии текучей среды
17 воздушный зазор в проходе линии для электролиний для воздухообмена
a межосевое расстояние между осями A1 и A2
b межосевое расстояние между осями A1 и A3
A1-A7 подвижные оси
Способ лакирования и лакировальная установка для декоративного лакирования
Устройство нанесения лака, в частности ротационный распылитель
Игольчатый клапан
Устройство для дезинфекции по меньшей мере одного помещения, в частности помещения пребывания людей, с распылителем

