Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к аэрокосмической технике и может быть использовано для обеспечения управления размещенной на космическом корабле (КК) переносной аппаратурой наблюдения подстилающей поверхности.
Известен способ управления целевой аппаратурой космического аппарата (КА), реализуемый системой управления телевизионным видеоспектральным комплексом КА (патент РФ 2068801, МПК 6: B64G 9/00), который включает наведение и отслеживание целей, при которых выполняется переориентация оси визирования установленной на поворотной платформе телевизионной и научной аппаратуры на выбираемую в реальном времени по ТВ-изображению цель с последующим автоматическим отслеживанием цели, в том числе выполняется определение пространственного положения прибора наведения относительно КА, задание координат целей, определение положения целей относительно прибора наведения, расчет углов поворота прибора наведения и повороты прибора наведения.
К недостаткам способа относится, в частности, то, что он допускает наведение только на цели, с одной стороны, ограниченные диапазоном углов поворота поворотной платформы, а с другой стороны, ограниченные попаданием в текущий кадр ТВ-изображения, который, кроме упомянутого ограничения по диапазону углов поворота поворотной платформы, имеет ограниченный охват, определяемый полем зрения ТВ-камеры. При этом сам факт размещения аппаратуры наведения на поворотной платформе ограничивает свободу перемещения аппаратуры при ее нацеливании и сопровождении цели экипажем КА.
Известен способ ориентации целевой аппаратуры КА на основе автоматических поворотных платформ (Лобанов B.C., Тарасенко Н.В., Шульга Д.Н., Зборошенко В.Н., Федосеев С.В., Хаханов Ю.А. Системы наведения целевой аппаратуры на основе автоматических поворотных платформ для PC МКС. XIV Санкт-Петербургская Международная Конференция по интегрированным навигационным системам, 28-30 мая 2007, стр. 206-213. Санкт-Петербург, Россия, 2007), заключающийся в размещении на КА двух- или трехстепенном кардановом подвесе с приводами по каждой из осей автоматических поворотных платформ, установке на автоматических поворотных платформах измерителей угловой скорости, астродатчиков и вычислительного устройства, определении по измерениям с измерителей угловой скорости и астродатчиков параметров углового движения автоматических поворотных платформ, формировании управляющих сигналов на приводы, обеспечивающие пространственные повороты автоматических поворотных платформ, отработке системой управления угловым движением КА возмущений, создаваемых в процессе поворотов автоматических поворотных платформ.
К недостатками способа относится, в частности, то, что автоматические поворотные платформы с целевой аппаратурой возможно размещать только на КА, инерционно-массовые характеристики (масса, моменты инерции) которых на два, три и более порядка превышают инерционно-массовые характеристики автоматических поворотных платформ с целевой аппаратурой.
Известен способ ориентации целевой аппаратуры КА (Аншаков Г.П., Макаров В.П., Мантуров А.И., Мостовой Я.А. Методы и средства управления в высокоинформативном наблюдении Земли из космоса. XIV Санкт-Петербургская Международная конференция по интегрированным навигационным системам, 28-30 мая 2007, стр. 165-173. Санкт-Петербург, Россия, 2007), включающий измерение параметров углового движения КА, формирование и выдачу на приводы инерционных исполнительных органов управляющих сигналов, создание минимальных моментов инерции КА путем перемещения аппаратуры и элементов конструкции к центру масс КА, изменение параметров углового движения инерционных масс инерционных исполнительных органов и соответствующее ему изменение параметров углового движения КА с неподвижно установленной на нем целевой аппаратурой, определение накопленного инерционными массами инерционных исполнительных органов кинетического момента, формирование и выдачу управляющих сигналов в систему сброса кинетического момента.
К недостаткам способа относится, в частности, то, что для обеспечения переориентации (программных поворотов) и стабилизации в требуемом положении целевой аппаратуры используют инерционные массы инерционных исполнительных органов.
Известен способ ориентации целевой аппаратуры космических аппаратов и устройство, его реализующее (патент РФ 2412873(13) С1; МПК B64G 1/24 (2006.01), B64G 1/22 (2006.01); заявка №2009140630/11, 02.11.2009; опубликовано: 27.02.2011 Бюл. №6), сущность которых состоит в исключении традиционно используемых в инерционных исполнительных органах инерционных масс (роторов, маховиков) и применение в их качестве элементов конструкции КА (ЭККА) с обеспечивающими системами. При этом целевую аппаратуру размещают подвижно относительно ЭККА в подвесе, по осям которого устанавливают приводы указанных исполнительных органов и датчики угла. Перемещают ЭККА от центра масс КА и от центра подвеса целевой аппаратуры, совмещают центры масс целевой аппаратуры и подвеса. Тем самым создают максимальные моменты инерции ЭККА и расположение продольной оси КА в положении устойчивого равновесия (по местной вертикали). По параметрам углового движения целевой аппаратуры и ЭККА определяют величину накопленного кинетического момента. Формируют управляющие сигналы на приводы инерционных масс и систему сброса кинетического момента, обеспечивая требуемое изменение параметров углового движения целевой аппаратуры и ЭККА.
Известен способ ориентирования перемещаемого в пилотируемом аппарате (ПА) прибора (патент РФ 2531781, заявка №2012134959/11 от 16.08.2012, МПК(2006.01): F41G 3/00 B64G 1/66 - прототип), включающий определение положения и ориентации свободно перемещаемого прибора внутри ПА, для чего подают команды на излучение импульсных ультразвуковых (УЗ) сигналов излучателями, распределенными по прибору, принимают сигналы УЗ-приемниками в разнесенных точках на ПА, синхронизируют моменты излучения и приема сигналов по радиоканалу, измеряют температуры в местах размещения УЗ-излучателей и УЗ-приемников, по этим данным и временам задержки приема сигналов определяют указанные положение и ориентацию прибора, по текущему положению ориентиров рассчитывают углы поворота прибора для его наведения на эти ориентиры и воспроизводят команды на поворот прибора. Способ обеспечивает возможность оператору выполнять ориентирование/наведение прибора, свободно перемещаемого внутри пилотируемого корабля и не имеющего с ним механической связи.
К недостаткам способа - прототипа относится, в частности, то, что он предусматривает ручное управление работой перемещаемой ориентируемой аппаратуры, что может привести к ошибочному или несвоевременному функциональному задействованию аппаратуры, что в свою очередь может привести к потере уникальных целевых данных и/или регистрации аппаратурой данных, которые являются неликвидными. Такая ситуация может возникать как следствие, например, возможной технологической несогласованности в функциональной работе перемещаемой аппаратуры и используемых бортовых систем пилотируемого корабля.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение высокоточного целевого управления размещенной на космическом корабле переносной аппаратурой наблюдения.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении реализации высокоточного наведения и отслеживания заданных на подстилающей поверхности объектов наблюдения посредством различной сменной аппаратуры наблюдения с использованием снабженного стационарным и подвижным зеркалами устройства управления наведением аппаратуры наблюдения, устанавливаемого на иллюминатор космического корабля,
Технический результат достигается тем, что в способе управления размещенной на космическом корабле переносной аппаратурой наблюдения, включающем определение относительного положения объекта наблюдения на подстилающей поверхности, космического корабля и аппаратуры наблюдения и формирование команд управления аппаратурой наблюдения, в отличии от прототипа дополнительно по определяемым параметрам движения и ориентации космического корабля определяют у какого из иллюминаторов линия следа нормали к плоскости иллюминатора наиболее близка к трассе полета, осуществляют разворот размещенного на космическом корабле подвижного зеркала до совмещения нормали к плоскости подвижного зеркала с биссектрисой угла между направлениями от подвижного зеркала на размещенное на космическом корабле стационарное зеркало и на определяемую точку прогнозируемого местоположения объекта наблюдения, осуществляют поиск объекта наблюдения по отображению подстилающей поверхности в поле зрения аппаратуры наблюдения, установленной с совмещением нормали к плоскости стационарного зеркала с биссектрисой угла между направлением на подвижное зеркало и направлением вдоль оси чувствительности аппаратуры наблюдения, осуществляют разворот подвижного зеркала до попадания объекта наблюдения в требуемую область поля зрения аппаратуры наблюдения, после чего формируют выдаваемую на аппаратуру наблюдения команду на выполнение съемки.
Изобретение поясняется рисунком, на котором представлена схема, поясняющая установленное на иллюминаторе космического корабля устройство управления наведением аппаратуры наблюдения, снабженное стационарным и подвижным зеркалами и узлами разъемного крепления аппаратуры наблюдения и съемной установки на иллюминатор. На рисунке введены обозначения:
1 - аппаратура наблюдения;
2 - устройство управления наведением, снабженное стационарным и подвижным зеркалами и узлами разъемного крепления аппаратуры наблюдения и съемной установки на иллюминатор;
3 - иллюминатор;
4 - корпус;
5 - отверстие узла разъемного крепления аппаратуры наблюдения;
6 - отверстие узла съемной установки корпуса на иллюминатор;
7 - узел разъемного крепления аппаратуры наблюдения;
8 - узел съемной установки корпуса на иллюминатор;
9 - стационарное зеркало;
10 - подвижное зеркало;
11 - первая ось подвеса;
12 - датчик угла, размещенный на первой оси подвеса;
13 - привод, размещенный на первой оси подвеса;
14 - вторая ось подвеса;
15 - датчик угла, размещенный на второй оси подвеса;
16 - привод, размещенный на второй оси подвеса;
17 - вычислительное устройство;
18 - ось чувствительности аппаратуры наблюдения;
19 - подстилающая поверхность;
20 - направление от одного зеркала на другое (направление от стационарного зеркала на подвижное зеркало / направление от подвижного зеркала на стационарное зеркало);
20-луч, выходящий из точки стационарного зеркала и проходящий через точку подвижного зеркала;
21- луч, выходящий из точки стационарного зеркала и проходящий через отверстие узла разъемного крепления аппаратуры наблюдения вдоль оси чувствительности закрепленной на корпусе аппаратуры наблюдения;
22 - луч, выходящий из точки подвижного зеркала и проходящий через точку стационарного зеркала;
23 - луч, выходящий из точки подвижного зеркала и проходящий через отверстие узла съемной установки корпуса на иллюминатор;
N1 - нормаль к плоскости стационарного зеркала;
N2 - нормаль к плоскости подвижного зеркала;
b1 - угол нижней границы диапазона значений углов плоскости подвижного зеркала с первой осью подвеса;
b2 - угол верхней границы диапазона значений углов плоскости подвижного зеркала с первой осью подвеса;
М - расстояние от второй оси подвеса до плоскости узла съемной установки корпуса на иллюминатор, совмещаемой при установке с плоскостью иллюминатора;
R - радиус иллюминатора;
K - толщина иллюминатора;
H - расстояние от космического корабля до подстилающей поверхности,
L - требуемое значение радиуса зоны обзора подстилающей поверхности через устройство управления аппаратурой наблюдения.
В качестве переносной аппаратуры наблюдения 1 рассматриваем различные оптические приборы (съемочную аппаратуру и т.п.) для выполнения визуально-инструментальных наблюдений задаваемых наземных объектов (исследуемых объектов, объектов мониторинга и т.д.) через иллюминатор космического корабля.
Предлагаемый способ может быть реализован с использованием представленного на рисунке устройства управления наведением 2 аппаратуры наблюдения 1, которое снабжено стационарным и подвижным зеркалами и узлами разъемного крепления аппаратуры наблюдения и съемной установки на иллюминатор.
Устройство управления наведением 2, например, содержит корпус 4 с двумя отверстиями 5, 6. На одном отверстии расположен узел разъемного крепления аппаратуры наблюдения 7. На другом отверстии расположен узел съемной установки корпуса на иллюминатор 8.
Устройство управления наведением 2 содержит установленные в корпусе 4 двухстепенной подвес с размещенными по осям подвеса датчиками угла 12, 14 и приводами 13, 16; вычислительное устройство 17; стационарное зеркало 9 и подвижное зеркало 10.
Выходы датчиков угла 12, 14 и входы приводов 13, 16 соединенным с соответственно входами и выходами вычислительного устройства 17.
Выход вычислительного устройства 17 соединен с аппаратурой наблюдения 1.
Стационарное зеркало 9 установлено с совмещением нормали к плоскости стационарного зеркала N1 с биссектрисой прямого угла между лучами, выходящими из точки стационарного зеркала и проходящими соответственно через точку подвижного зеркала и через упомянутое отверстие узла разъемного крепления аппаратуры наблюдения вдоль оси чувствительности закрепленной на корпусе аппаратуры наблюдения 20, 21.
Подвижное зеркало 10 установлено на подвесе с совмещением нормали к плоскости подвижного зеркала с биссектрисой угла между лучами, выходящими из точки подвижного зеркала и проходящими соответственно через точку стационарного зеркала и через упомянутое отверстие узла съемной установки корпуса на иллюминатор 22, 23;
Первая ось подвеса 11 проходит через подвижное зеркало 10 и упомянутое отверстие узла съемной установки корпуса на иллюминатор 6.
Вторая ось подвеса 14 размещена в плоскости подвижного зеркала 10 перпендикулярно первой оси повеса 11 на задаваемом расстоянии М от плоскости узла съемной установки корпуса на иллюминатор 8, совмещаемой при установке с плоскостью иллюминатора 3.
Привод поворота подвижного зеркала по расположенной в плоскости подвижного зеркала второй оси подвеса (привод, размещенный на второй оси подвеса 16) выполнен обеспечивающим поворот подвижного зеркала 10 в задаваемом диапазоне углов плоскости подвижного зеркала 10с первой осью подвеса 11 
Задаваемое расстояние М и задаваемый диапазон углов  определяются такими, чтобы обеспечить требуемый размер мгновенной зоны обзора подстилающей поверхности через устройство управления наведением 2 аппаратурой наблюдения 1, включая возможность наведения оси чувствительности аппаратуры наблюдения 18 через устройство управления наведением 2 на точки подстилающей поверхности в пределах всей мгновенной зоны обзора подстилающей поверхности через устройство управления наведением 2.
определяются такими, чтобы обеспечить требуемый размер мгновенной зоны обзора подстилающей поверхности через устройство управления наведением 2 аппаратурой наблюдения 1, включая возможность наведения оси чувствительности аппаратуры наблюдения 18 через устройство управления наведением 2 на точки подстилающей поверхности в пределах всей мгновенной зоны обзора подстилающей поверхности через устройство управления наведением 2.
Поясним действия предлагаемого способа.
По определяемым параметрам движения и ориентации космического корабля определяют у какого из иллюминаторов линия следа нормали к плоскости иллюминатора наиболее близка к трассе полета.
Данный иллюминатор выбирают для установки на нем описанного выше устройства управления наведением, снабженного стационарным и подвижным зеркалами и узлами разъемного крепления аппаратуры наблюдения и съемной установки на иллюминатор.
Таким образом, определение используемого для наблюдений иллюминатора выполняют из условия возможности/доступности наблюдения требуемых объектов на подстилающей поверхности с помощью аппаратуры наблюдения через систему зеркал, содержащую стационарное и подвижное зеркала, установленного на иллюминатор устройства управления наведением.
Описанное устройство управления наведением, в состав которого входит данная система зеркал, устанавливают на определенный/выбранный иллюминатор космического корабля посредством узла съемной установки данного устройства на иллюминатор.
Аппаратуру наблюдения устанавливают с совмещением нормали к плоскости стационарного зеркала с биссектрисой угла между направлением на подвижное зеркало и направлением вдоль оси чувствительности аппаратуры наблюдения, при этом аппаратуру наблюдения закрепляют на устройство управления наведением, в состав которого входит данная система зеркал, посредством узла разъемного крепления аппаратуры наблюдения.
Определяют (прогнозируют) положение объекта наблюдения относительно космического корабля на возможных витках выполнения наблюдений. Осуществляют контроль взаимного относительного положения объекта наблюдения и устройства управления наведением, в состав которого входит данная система зеркал, и определяют моменты, когда требуемые объекты наблюдения расположены в требуемой зоне относительно устройства управления наведением (в зоне, соответствующей нахождению объекта/ов наблюдения в мгновенной зоне обзора подстилающей поверхности через устройство управления наведением).
Осуществляют разворот размещенного на космическом корабле подвижного зеркала до совмещения нормали к плоскости подвижного зеркала с биссектрисой угла между направлениями от подвижного зеркала на размещенное на космическом корабле стационарное зеркало и на определяемую точку прогнозируемого местоположения объекта наблюдения.
Для этого по данным о текущем и требуемом расчетном положениях подвижного зеркала формируют команды управления положением подвижного зеркала, обеспечивающие выставку подвижного зеркала в расчетное положение, при котором обеспечивается наведение оси чувствительности аппаратуры наблюдения через устройство управления наведением, в состав которого входит данная система зеркал, на расчетную точку местоположения требуемого объекта наблюдения на подстилающей поверхности.
Осуществляют поиск (идентификацию) объекта наблюдения по отображению подстилающей поверхности в поле зрения аппаратуры наблюдения (по отображению в видоискателе аппаратуры).
Осуществляют разворот подвижного зеркала до попадания объекта наблюдения в требуемую область поля зрения аппаратуры наблюдения (например, в центральную часть кадра).
Для этого по данным о текущем и требуемом расчетном положениях подвижного зеркала формируют команды управления положением подвижного зеркала, обеспечивающие выставку подвижного зеркала в расчетное положение, при котором обеспечивается наведение оси чувствительности аппаратуры наблюдения через устройство управления наведением, в состав которого входит данная система зеркал, с требуемой точностью на требуемый объект наблюдения - а именно, попадание требуемого объекта наблюдения в требуемую область поля зрения аппаратуры наблюдения.
Осуществляют контроль взаимного относительного положения подвижного зеркала, стационарного зеркала, аппаратуры наблюдения и объекта наблюдения и определяют моменты, когда достигнутое положение подвижного зеркала обеспечивает наведение оси чувствительности аппаратуры наблюдения через устройство управления наведением, в состав которого входит данная система зеркал, на требуемый объект наблюдения на подстилающей поверхности.
При достижении данного условия формируют и выдают на аппаратуру наблюдения команду управления аппаратурой наблюдения на выполнение съемки.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение обеспечивает реализацию высокоточного наведения и отслеживания заданных на подстилающей поверхности объектов наблюдения посредством различной сменной аппаратуры наблюдения с использованием снабженного стационарным и подвижным зеркалами устройства управления наведением аппаратуры наблюдения, устанавливаемого на выбранный иллюминатор космического корабля.
Предлагаемый способ управления аппаратурой наблюдения обеспечивает управление наведением аппаратуры наблюдения путем наведения оси чувствительности аппаратуры наблюдения на наблюдаемые объекты подстилающей поверхности через систему зеркал - стационарного и подвижного (поворотного), т.е. без выполнения поворотов непосредственно самой аппаратуры наблюдения.
Это, с одной стороны, повышает удобство работы с аппаратурой наблюдения - за счет обеспечения постоянства ориентации самой аппаратуры при выполнении наблюдений, в том числе расширяет возможности использования аппаратуры в условиях ограниченного пространства космического корабля и различных возможных ограничениях доступа к его иллюминаторам, а, с другой стороны, снижает требования к техническим характеристикам подвеса и его приводов.
Предложенный способ обеспечивает гарантированное высокоточное наведение аппаратуры наблюдения на требуемые объекты наблюдения за счет предварительного наведения оси чувствительности аппаратуры наблюдения через предложенную систему зеркал на расчетное местоположение объекта наблюдения и последующее уточненное наведение оси чувствительности аппаратуры наблюдения через предложенную систему зеркал на опознанный (идентифицированный) по отображению подстилающей поверхности в поле зрения аппаратуры наблюдения.(по видоискателю аппаратуры) объект наблюдения.
Значимость указанного эффекта при применении предлагаемого технического решения на КА в полете обусловливается тем, что, с одной стороны, в полете отсутствует или существенно ограничена (как технически, так и организационно) оперативная возможность проверки качества зарегистрированных аппаратурой наблюдения данных, а с другой стороны, регистрируемые данные обладают уникальностью и их потеря или несвоевременная регистрация могут нести невосполнимый ущерб (как научный, так и экономический).
Предложенная съемная установка зеркал на корабле (съемная установка устройства управления наведением аппаратуры наблюдения на иллюминаторы корабля) обеспечивает возможность использования для наблюдения различных иллюминаторов космического корабля, что позволяет как выбирать и использовать иллюминатор, наблюдение через который обеспечивает наилучшие условия наблюдения задаваемых/требуемых объектов наблюдения, так и использовать именно тот иллюминатор, через который обеспечивается единственная возможность выполнения наблюдения задаваемых/требуемых объектов наблюдения при отсутствии такой возможности через другие иллюминаторы космического корабля.
Предложенное разъемное крепление аппаратуры наблюдения на устройство управления наведением аппаратуры наблюдения обеспечивает возможность использования для реализации наблюдений различной сменной аппаратуры наблюдения.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Способ управления размещенной на космическом корабле переносной аппаратурой наблюдения, включающий определение относительного положения объекта наблюдения на подстилающей поверхности, космического корабля и аппаратуры наблюдения и формирование команд управления аппаратурой наблюдения, отличающийся тем, что дополнительно по определяемым параметрам движения и ориентации космического корабля определяют, у какого из иллюминаторов линия следа нормали к плоскости иллюминатора наиболее близка к трассе полета, осуществляют разворот размещенного на космическом корабле подвижного зеркала до совмещения нормали к плоскости подвижного зеркала с биссектрисой угла между направлениями от подвижного зеркала на размещенное на космическом корабле стационарное зеркало и на определяемую точку прогнозируемого местоположения объекта наблюдения, осуществляют поиск объекта наблюдения по отображению подстилающей поверхности в поле зрения аппаратуры наблюдения, установленной с совмещением нормали к плоскости стационарного зеркала с биссектрисой угла между направлением на подвижное зеркало и направлением вдоль оси чувствительности аппаратуры наблюдения, осуществляют разворот подвижного зеркала до попадания объекта наблюдения в требуемую область поля зрения аппаратуры наблюдения, после чего формируют выдаваемую на аппаратуру наблюдения команду на выполнение съемки.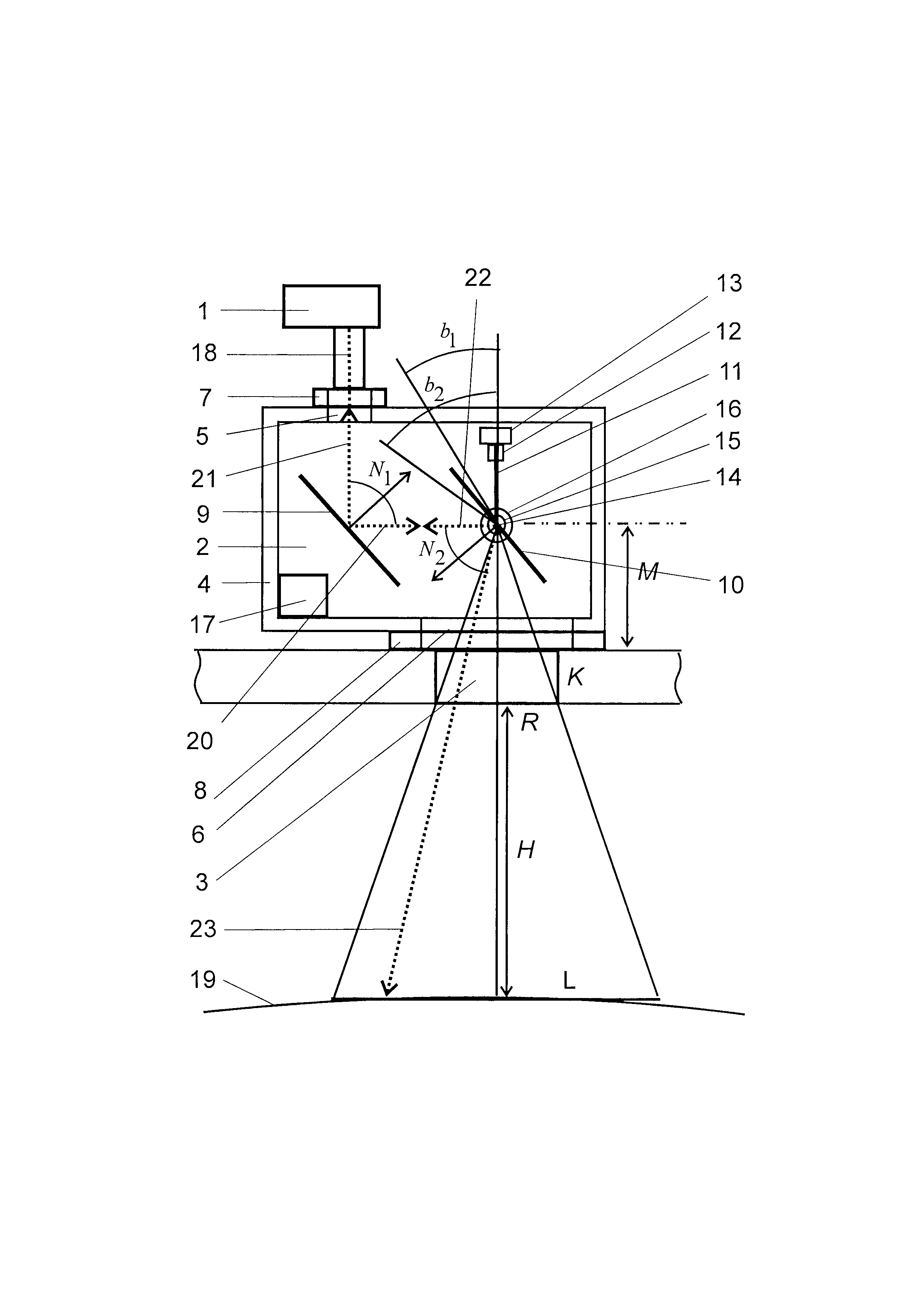
Электронасосный агрегат
Устройство деления потока жидкости
Способ оценки эффективности солнечных панелей системы электропитания космического аппарата
Система электроснабжения космического корабля ракетно-космического комплекса
Индуктивно-емкостной энергетический элемент (варианты)
Устройство управления размещенной на космическом корабле переносной аппаратурой наблюдения
Герметизированное устройство
Способ изготовления теплопроводящей прокладки для отвода тепла от электронных компонентов печатных плат
Способ управления транспортной системой при выполнении перелёта на высокоэнергетическую орбиту
Способ управления движением космического объекта при сближении с другим космическим объектом
Способ определения трехосной ориентации космического аппарата
Способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой
Способ управления положением солнечных батарей космического аппарата и система для его осуществления
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Способ определения деформации корпуса объекта преимущественно космического аппарата
Устройство для ориентирования перемещаемой на борту пилотируемого корабля аппаратуры наблюдения
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ определения деформации корпуса объекта преимущественно космического аппарата

