Результат интеллектуальной деятельности: УПРАВЛЕНИЕ КОНВЕЙЕРОМ В СИСТЕМЕ ГОРНЫХ РАЗРАБОТОК
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
[0001] Данное изобретение относится к управлению конвейером, таким как забойный скребковый конвейер (armored face conveyor - “AFC”) или консольный перегружатель (beam stage loader - “BSL”).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0002] Системы с выемкой лавами включают в себя, среди прочего, конвейер, такой как AFC или BSL, для транспортировки добытых ископаемых (например, угля) из области, где эти ископаемые добываются, к области для обработки (например, дробления, хранения, и т.д.). AFC включают в себя первую звездочку и вторую звездочку, на которые надета цепь. Цепь приводят в движение посредством одного или нескольких двигателей (например, двигателя основного штрека, двигателя вспомогательного штрека, и т.д.), и перемещение цепи вокруг звездочек обеспечивает транспортировку конвейером добытых ископаемых. Общепринятые конвейеры, которые включают в себя удлиняемую возвратную концевую раму, используют технологии натяжения для увеличения натяжения цепи вокруг звездочек и минимизации провисания цепи или состояний с нулевым натяжением (например, цепь одинаково натянута во всей ее длине). Технологии натяжения включают в себя, например, использование гидравлического цилиндра для отодвигания первой звездочки от второй звездочки. Когда конвейер загружают добытыми ископаемыми, цепь конвейера подвергается напряжениям и растяжению, что приводит к некоторой величине провисания цепи.
[0003] Общепринятые технологии натяжения основаны на прямых измерениях натяжения цепи (например, с использованием штифта нагрузки) или непрямых измерениях натяжения цепи, которые используют, например, мощность двигателя или другую характеристику приводного механизма для определения оцениваемого натяжения цепи. Такие технологии являются ненадежными вследствие повреждения датчиков или неточности, а также могут быть дорогостоящими для реализации. В результате, управление натяжением цепи может быть также ненадежным и дорогостоящими для реализации.
[0004] Данное изобретение относится к улучшенным и упрощенным технологиям для управления величиной натяжения цепи для ограничения провисания цепи. Данное изобретение включает в себя системы и способы для определения величины провисания цепи конвейера или участка конвейера в системе горных разработок. Контроллер, при этом, настраивает (т.е., увеличивает или уменьшает) расстояние между первой звездочкой и второй звездочкой для настройки натяжения цепи на основе определенной величины провисания цепи. Величина провисания цепи может быть определена на основе сравнения характеристики по меньшей мере одной из первой звездочки или второй звездочки и характеристики цепи. Дополнительно или альтернативно, величина провисания цепи может быть определена на основе сравнения количества звеньев цепи, проходящих первое контролируемое положение, и количества звеньев цепи, проходящих второе контролируемое положение.
[0005] В одном варианте осуществления, данное изобретение обеспечивает конвейер для системы горных разработок. Этот конвейер включает в себя первую звездочку и вторую звездочку, цепь, связанную с первой звездочкой и второй звездочкой, приводной механизм, соединенный по меньшей мере с одной из первой звездочки и второй звездочки, первый датчик, второй датчик, и контроллер. Приводной механизм выполнен с возможностью приведения в движение по меньшей мере одной из первой звездочки или второй звездочки. Первый датчик выполнен с возможностью генерации первого сигнала, связанного с характеристикой по меньшей мере одной из первой звездочки или второй звездочки. Второй датчик выполнен с возможностью генерации второго сигнала, связанного с характеристикой цепи. Контроллер выполнен с возможностью приема первого сигнала от первого датчика, определения значения характеристики по меньшей мере одной из первой звездочки или второй звездочки на основе первого сигнала, приема второго сигнала от второго датчика, и определения значения характеристики цепи на основе второго сигнала. Контроллер также выполнен с возможностью сравнения значения характеристики по меньшей мере одной из первой звездочки или второй звездочки и значения характеристики цепи и определения величины провисания цепи на основе этого сравнения.
[0006] В другом варианте осуществления, данное изобретение обеспечивает способ определения величины провисания цепи для конвейера в системе горных разработок. Этот способ включает в себя прием, процессором, первого сигнала, связанного с характеристикой по меньшей мере одной из первой звездочки или второй звездочки, определение, с использованием процессора, значения характеристики по меньшей мере одной из первой звездочки или второй звездочки на основе первого сигнала, прием, процессором, второго сигнала, связанного с характеристикой цепи, и определение, с использованием процессора, значения характеристики цепи на основе второго сигнала. Этот способ дополнительно включает в себя сравнение, с использованием процессора, значения характеристики по меньшей мере одной из первой звездочки или второй звездочки и значения характеристики цепи, и определение, с использованием процессора, величины провисания цепи на основе этого сравнения.
[0007] В другом варианте осуществления, данное изобретение обеспечивает конвейер для системы горных разработок. Этот конвейер включает в себя первую звездочку и вторую звездочку, цепь, связанную с первой звездочкой и второй звездочкой, контролируемую зону, имеющую первое контролируемое положение и второе контролируемое положение, приводной механизм, соединенный по меньшей мере с одной из первой звездочки или второй звездочки, первый датчик, второй датчик, и контроллер. Приводной механизм выполнен с возможностью приведения в движение по меньшей мере одной из первой звездочки или второй звездочки. Первый датчик выполнен с возможностью генерации первого сигнала, связанного с количеством звеньев цепи, проходящих первое контролируемое положение контролируемой зоны. Второй датчик выполнен с возможностью генерации второго сигнала, связанного с количеством звеньев цепи, проходящих второе контролируемое положение контролируемой зоны. Контроллер выполнен с возможностью приема первого сигнала от первого датчика, определения количества звеньев цепи, проходящих первое контролируемое положение, на основе первого сигнала, приема второго сигнала от второго датчика, и определения количества звеньев цепи, проходящих второе контролируемое положение, на основе второго сигнала. Контроллер также выполнен с возможностью сравнения количества звеньев цепи, проходящих первое контролируемое положение, и количества звеньев цепи, проходящих второе контролируемое положение, и определения величины провисания цепи на основе этого сравнения.
[0008] В другом варианте осуществления, данное изобретение обеспечивает способ для определения величины провисания цепи для конвейера в системе горных разработок. Этот способ включает в себя прием, процессором, первого сигнала, связанного с характеристикой по меньшей мере одной из первой звездочки или второй звездочки, определение, с использованием процессора, количества звеньев цепи, проходящих первое контролируемое положение, на основе первого сигнала, прием, процессором, второго сигнала, связанного с характеристикой цепи, и определение, с использованием процессора, количества звеньев цепи, проходящих второе контролируемое положение, на основе второго сигнала. Этот способ дополнительно включает в себя сравнение, с использованием процессора, количества звеньев цепи, проходящих первое контролируемое положение, и количества звеньев цепи, проходящих второе контролируемое положение, и определение, с использованием процессора, величины провисания цепи на основе этого сравнения.
[0009] Перед подробным объяснением каких-либо вариантов осуществления данного изобретения, следует отметить, что данное изобретение не ограничено в своей применимости подробностями конфигурации и расположением компонентов, изложенными в нижеследующем описании или показанными в сопутствующих чертежах. Данное изобретение может иметь другие варианты осуществления и может быть осуществлено на практике или выполнено различными способами. Также, следует понимать, что формулировки и термины, используемые здесь, приведены в целях описания и не должны рассматриваться в качестве ограничения. Использование терминов «включающий в себя», «содержащий», или «имеющий», и их вариантов, как предполагается, охватывает элементы, перечисленные за ними, и их эквиваленты, а также дополнительные элементы. Если не указано иное, или в отсутствие иных ограничений, то термины «прикрепленный», «соединенный», «поддерживаемый», и «связанный» и их варианты используются в широком смысле, и охватывают как прямые, так и непрямые крепления, соединения, опоры, и связи.
[0010] Дополнительно, следует понимать, что варианты осуществления данного изобретения могут включать в себя аппаратное обеспечение, программное обеспечение, и электронные компоненты или модули, которые, в целях описания, могут быть показаны и описаны, как если бы большинство из этих компонентов было реализовано только в аппаратном обеспечении. Однако, специалистам в данной области техники, и на основе прочтения данного подробного описания, будет понятно, что, по меньшей мере в одном варианте осуществления, аспекты данного изобретения на основе электронных средств могут быть реализованы в программном обеспечении (например, сохранены в непереходной машиночитаемой среде), которое может быть исполнено одним или несколькими обрабатывающими блоками, такими как микропроцессор и/или специализированные интегральные схемы (application specific integrated circuit - “ASIC”). По существу, следует отметить, что множество устройств на основе аппаратного обеспечения или программного обеспечения, а также множество других структурных компонентов может быть использовано для реализации данного изобретения. Например, «серверы» и «вычислительные устройства», описанные в описании изобретения, могут включать в себя один или несколько обрабатывающих блоков, один или несколько модулей машиночитаемых сред, один или несколько интерфейсов ввода/ вывода данных, и различные соединения (например, системную шину), соединяющие компоненты.
[0011] Независимые аспекты данного изобретения будут понятны при рассмотрении подробного описания и сопутствующих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
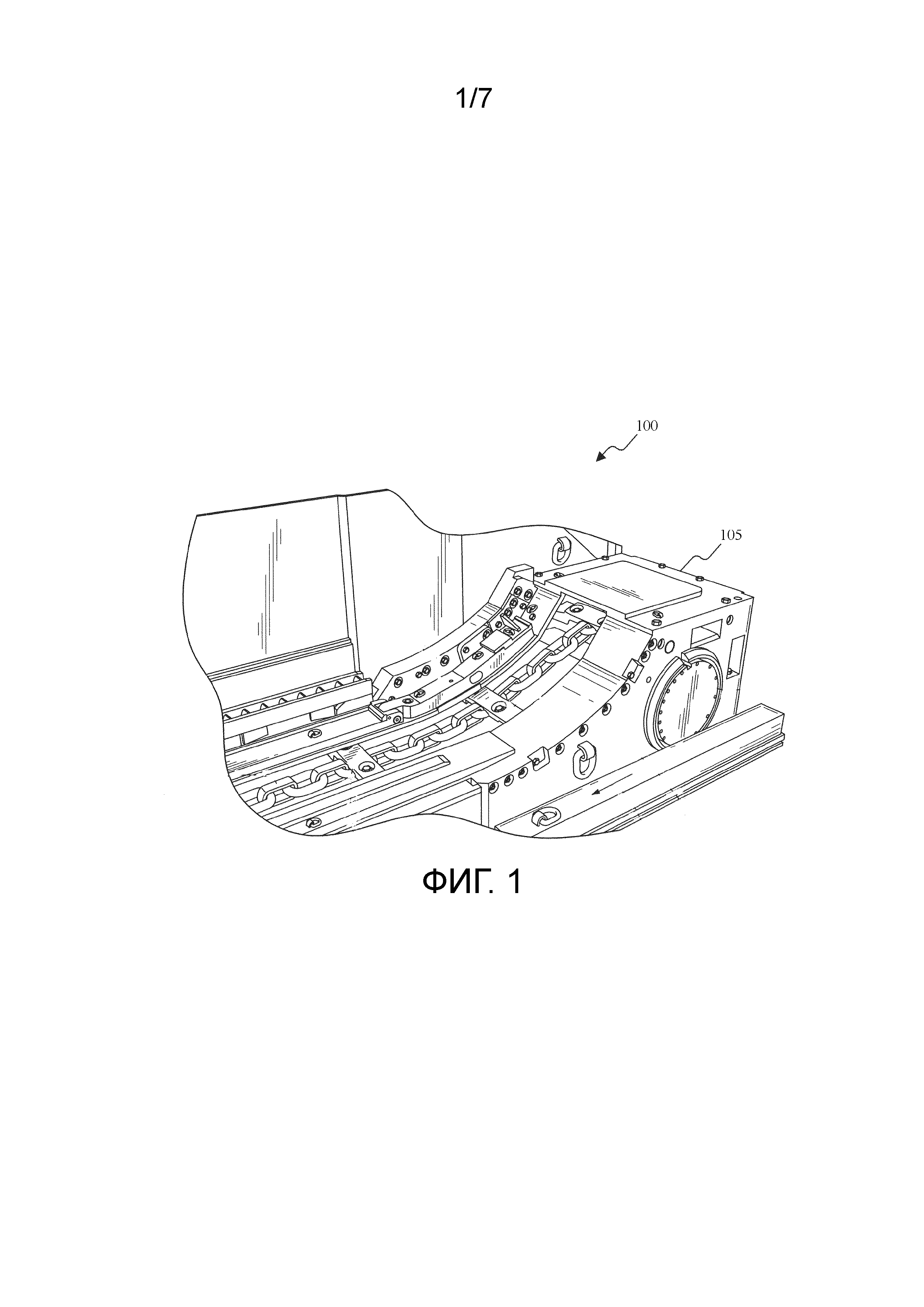
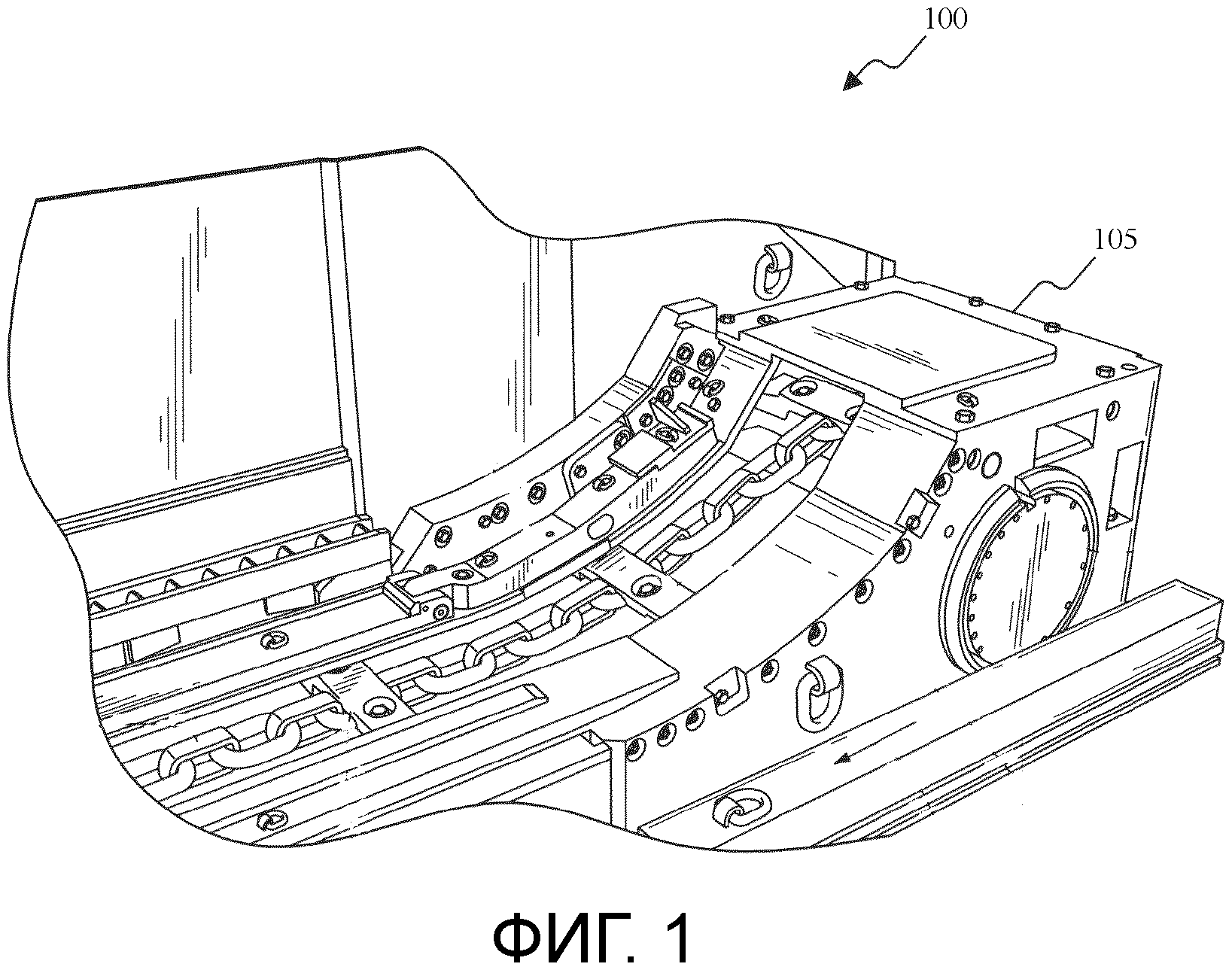
[0012] Фиг. 1 показывает участок цепного конвейера, включающий в себя концевую раму.
[0013] Фиг. 2 показывает контроллер для цепного конвейера, согласно одному варианту осуществления данного изобретения.
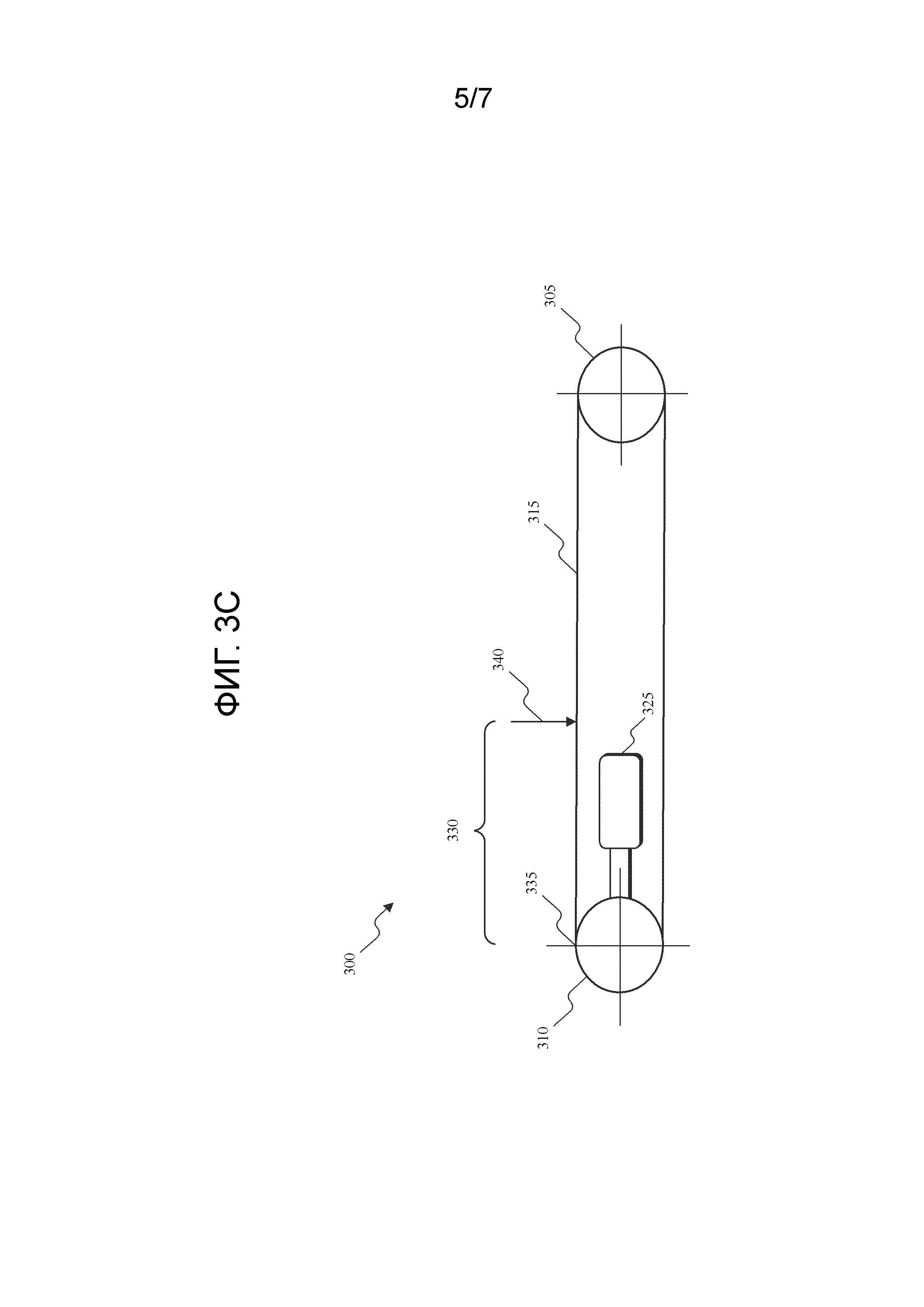
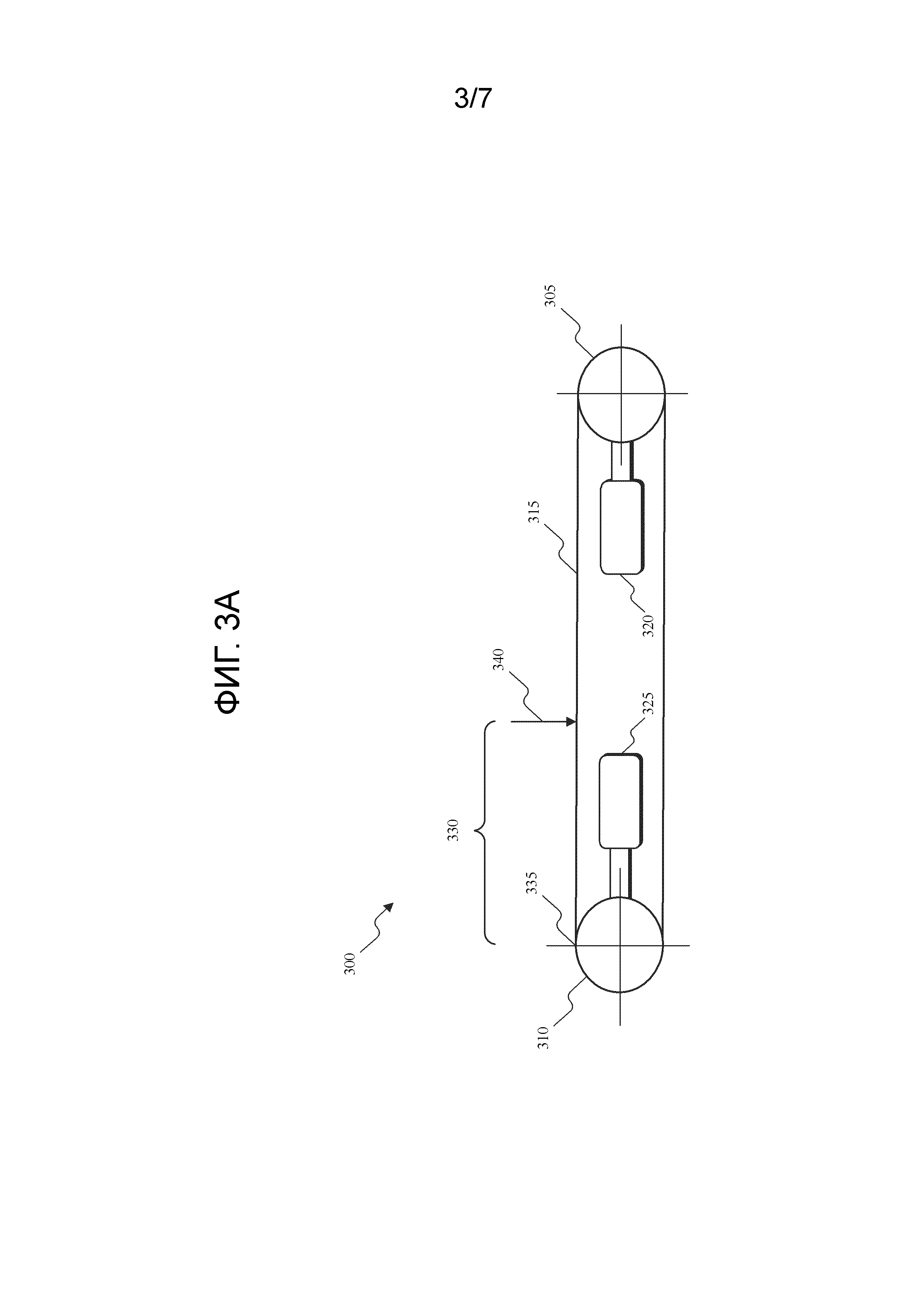
[0014] Фиг. 3A, 3B, и 3C являются схемами, показывающими обобщенные конвейеры и «опасную зону» конвейеров.
[0015] Фиг. 4 является процессом для определения величины провисания цепи для конвейера.
[0016] Фиг. 5 является другим процессом для определения величины провисания цепи для конвейера.
ПОДРОБНОЕ ОПИСАНИЕ
[0017] Изобретение, описанное здесь, относится к управлению цепной конвейерной системой. Цепная конвейерная система включает в себя, например, забойные скребковые конвейеры (“AFC”) или консольные перегружатели (“BSL”). В целях описания, данное изобретение описано здесь с использованием вариантов осуществления, которые включают в себя AFC. AFC включают в себя первую звездочку, вторую звездочку, цепь, один или несколько приводных механизмов (например, двигателей), один или несколько гидравлических цилиндров, и контроллер. Контроллер выполнен с возможностью приема одного или нескольких сигналов, связанных с характеристиками AFC, и определения величины провисания цепи на основе этих сигналов. Характеристикой AFC является, например, характеристика первой звездочки и/или второй звездочки (например, угловое положение звездочки, угловая скорость звездочки, угловое ускорение звездочки, количество звеньев, проходящих некоторое положение, и т.д.), характеристика цепи (например, положение цепи, скорость цепи, ускорение цепи, количество звеньев, проходящих некоторое положение, и т.д.), и т.д. Контроллер также выполнен с возможностью автоматического управления относительными положениями первой звездочки и второй звездочки на основе определенной величины провисания цепи.
[0018] Фиг. 1 показывает участок AFC 100, который включает в себя возвратную концевую раму 105. Концевая рама 105 включает в себя, среди прочего, фиксированный участок рамы, удлиняемый участок рамы, и один или несколько гидравлических цилиндров. Возвратная концевая рама 105 является частью системы с выемкой лавами, которая также включает в себя, например, врубовую машину. Положение одного или нескольких гидравлических цилиндров может быть изменено для соответствующего управления положением удлиняемого участка рамы, первой звездочки, второй звездочки, и т.д.
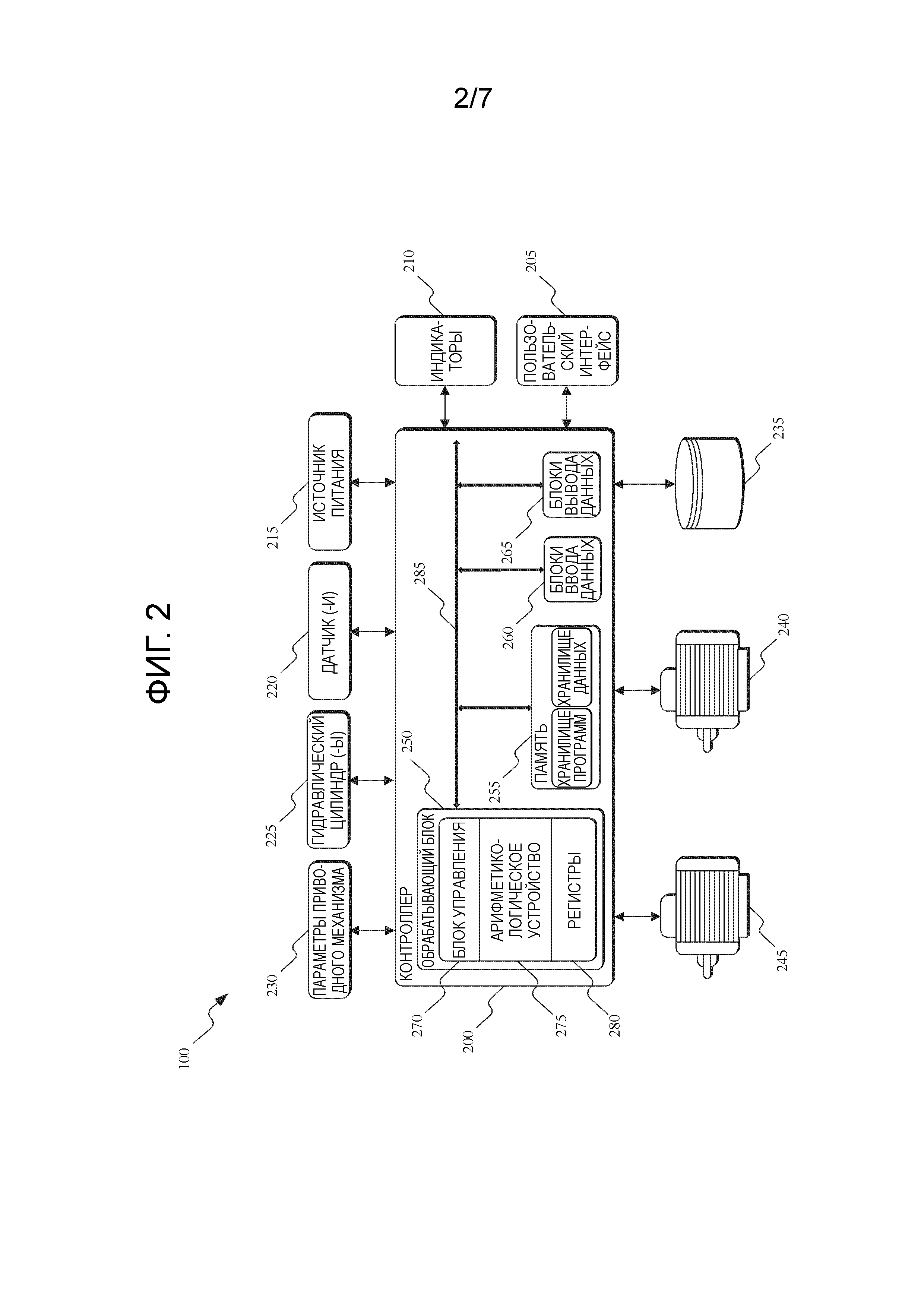
[0019] Фиг. 2 показывает контроллер 200, связанный с AFC 100. Контроллер 200 соединен или связан с множеством дополнительных модулей или компонентов, таких как пользовательский интерфейсный модуль 205, один или несколько индикаторов 210, модуль 215 источника питания, один или несколько датчиков 220, один или несколько гидравлических цилиндров 225, модуль 230 параметров приводного механизма или двигателя, хранилище или база 235 данных, первый приводной механизм или привод 240 (например, связанный с основным штреком), и второй приводной механизм или привод 245 (например, связанный с вспомогательным штреком). В некоторых вариантах осуществления, первый приводной механизм и привод 240 включает в себя первый двигатель и первый привод от двигателя, а второй приводной механизм и привод 245 включает в себя второй двигатель и второй привод от двигателя. В некоторых вариантах осуществления, каждый из первого двигателя и первого привода 240 от двигателя и второго двигателя и второго привода 245 от двигателя включает в себя агрегаты распределительного устройства. Варианты осуществления данного изобретения, описанные здесь, описаны в отношении приводных механизмов и приводов, которые являются двигателями и приводами от двигателей. Один или несколько датчиков 220 являются, например, тахометрами, выполненными с возможностью измерения или восприятия характеристики первой звездочки или второй звездочки (например, углового положения звездочки, угловой скорости звездочки, углового ускорения звездочки, и т.д.), датчиками близости, выполненными с возможностью измерения или восприятия характеристики цепи (например, положения цепи, скорости цепи, ускорения цепи, и т.д.), датчиками мощности в пределах AFC 100, выполненными с возможностью измерения или восприятия электрической характеристики (например, тока, напряжения, коэффициента мощности, крутящего момента, скорости, входной мощности, выходной мощности, и т.д.), датчиками нагрузки, и т.д. Контроллер 200 включает в себя комбинации аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью, среди прочего, управления функционированием AFC 100, управления положением одного или нескольких гидравлических цилиндров 225, активации одного или нескольких индикаторов 210 (например, жидкокристаллического дисплея (liquid crystal display - “LCD”)), контроля функционирования AFC 100, и т.д.
[0020] В некоторых вариантах осуществления, контроллер 200 включает в себя множество электрических и электронных компонентов, которые обеспечивают питание, оперативное управление, и защиту для компонентов и модулей в пределах контроллера 200 и/или AFC 100. Например, контроллер 200 включает в себя, среди прочего, обрабатывающий блок 250 (например, микропроцессор, микроконтроллер, или другое подходящее программируемое устройство), память 255, блоки 260 ввода данных, и блоки 265 вывода данных. Обрабатывающий блок 250 включает в себя, среди прочего, блок 270 управления, арифметико-логическое устройство 275 (arithmetic logic unit - “ALU”), и множество регистров 280 (показанных в виде группы регистров на фиг. 2), и он реализован с использованием общеизвестной вычислительной архитектуры, такой как модифицированная гарвардская архитектура, архитектура фон Неймана, и т.д. Обрабатывающий блок 250, память 255, блоки 260 ввода данных, и блоки 265 вывода данных, а также различные модули, соединенные с контроллером 200, соединены одной или несколькими шинами управления и/или данных (например, общей шиной 285). Шины управления и/или данных показаны, в общем, на фиг. 2, в целях иллюстрации. Использование одной или нескольких шин управления и/или данных для межсоединения и связи различных модулей и компонентов, ввиду изобретения, описанного здесь, известно специалистам в данной области техники. В некоторых вариантах осуществления, контроллер 200 реализован частично или полностью на полупроводниковой интегральной схеме, является матрицей программируемых логических вентилей (field-programmable gate array - “FPGA”), является специализированной интегральной схемой (application specific integrated circuit - “ASIC”), и т.д.
[0021] Память 255 включает в себя, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут включать в себя комбинация разных типов памяти, таких как постоянное запоминающее устройство (read-only memory - “ROM”), память с произвольным доступом (random access memory - “RAM”) (например, динамическая RAM [“DRAM”], синхронная DRAM [“SDRAM”], и т.д.), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory - “EEPROM”), флэш-память, жесткий диск, SD-карта, или другие подходящие магнитные, оптические, физические, или электронные запоминающие устройства или структуры данных. Обрабатывающий блок 250 соединен с памятью 255 и исполняет команды программного обеспечения, которые могут храниться в RAM памяти 255 (например, во время исполнения), ROM памяти 255 (например, в общем, на постоянной основе), или в другой непереходной машиночитаемой среде, такой как другая память или диск. Программное обеспечение, включенное в реализацию AFC 100, может храниться в памяти 255 контроллера 200. Программное обеспечение включает в себя, например, аппаратно-программное обеспечение, одно или несколько приложений, программные данные, фильтры, правила, один или несколько программных модулей, и другие исполняемые команды. Контроллер 200 выполнен с возможностью извлечения из памяти и исполнения, среди прочего, команд, связанных с процессами управления и способами, описанным здесь. В других конструкциях, контроллер 200 включает в себя дополнительные компоненты, меньшее количество компонентов, или другие компоненты.
[0022] Модуль 230 параметров приводного механизма или двигателя соединен или связан с двигателями и приводами 240, 245, которые соединены с первой звездочкой и/или второй звездочкой. Модуль 230 параметров выполнен с возможностью приема сигналов, связанных с одним или несколькими параметрами (например, током, напряжением, коэффициентом мощности, крутящим моментом, скоростью, входной мощностью, выходной мощностью, и т.д.) двигателей 240, 245. В некоторых вариантах осуществления, модуль 230 параметров принимает сигналы, связанные с параметрами двигателей. В других вариантах осуществления, модуль 230 параметров включает в себя или соединен с одним или несколькими датчиками 220 для восприятия параметров двигателей.
[0023] Двигателями 240, 245 управляют посредством управляющих сигналов, принимаемых от контроллера 200 или другого соответствующего контроллера. Двигатели 240, 245 также соединены с редукторами для уменьшения угловой скорости двигателей до угловой скорости, подходящей для звездочек и конвейера. В некоторых реализациях, контроллер 200 выполнен с возможностью автономного управления двигателями 240, 245 и AFC с использованием датчиков 220 и одной или нескольких хранящихся программ или модулей. В других реализациях, контроллер 200 выполнен с возможностью управления двигателями и AFC на основе комбинации ручного ввода данных и автоматического управления. Один или несколько гидравлических цилиндров 225 также принимают управляющие сигналы от контроллера 200, и выборочно удлиняют или втягивают возвратную концевую раму (например, изменяют положение первой звездочки, второй звездочки, и т.д.) на основе управляющих сигналов от контроллера 200. Контроллер 200 также контролирует двигатели и один или несколько гидравлических цилиндров 225 для определения соответствующих характеристик. Например, контроллер 200 может контролировать или воспринимать электрические характеристики одного или нескольких двигателей, положение одного или нескольких гидравлических цилиндров 225 (например, удлинение одного или нескольких гидравлических цилиндров), и т.д. Хотя показан единственный контроллер, в других конструкциях, контроллер 200 может быть разделен на множество контроллеров. Например, контроллер 200 может быть разделен на объединенный блок управления (consolidated control unit - “CCU”), программируемый блок управления (programmable control unit - “PCU”), и т.д. CCU может быть размещен во взрывобезопасном корпусе и может обеспечить управление конвейерной системой. PCU является искробезопасной системой, которая может быть связана с CCU для, среди прочего, остановки, замедления, прекращения, и т.д., работы конвейера.
[0024] Пользовательский интерфейсный модуль 205 используют для управления или контроля AFC или системы горных разработок. Например, пользовательский интерфейсный модуль 205 оперативно соединяют с контроллером 200 для управления скоростью конвейера, скоростью одного или нескольких двигателей, и т.д. Пользовательский интерфейсный модуль 205 может включать в себя комбинацию цифровых и аналоговых устройств ввода или вывода данных, необходимых для обеспечения необходимого уровня управления и контроля для AFC. Например, пользовательский интерфейсный модуль 205 может включать в себя устройства отображения и ввода данных, такие как сенсорный дисплей, одну или несколько ручек, круговых шкал, переключателей, кнопок, и т.д. Устройство отображения является, например, жидкокристаллическим дисплеем (liquid crystal display - “LCD”), дисплеем на светодиодах (light-emitting diode - “LED”), дисплеем на органических LED (organic LED - “OLED”), электролюминесцентным дисплеем (electroluminescent display - “ELD”), дисплеем на основе электронных эмиттеров с поверхностной проводимостью (surface-conduction electron-emitter display -“SED”-дисплей), дисплеем с автоэлектронной эмиссией (field emission display - “FED”), LCD на тонкопленочных транзисторах (thin-film transistor - “TFT”), и т.д. В других конструкциях, устройство отображения является дисплеем с супер-активной матрицей OLED (Super active-matrix OLED - “AMOLED”). Пользовательский интерфейсный модуль 205 может быть также выполнен с возможностью отображения состояний или данных, связанных с AFC, в режиме реального времени или по существу в режиме реального времени. Например, пользовательский интерфейсный модуль 205 выполнен с возможностью отображения измеренных электрических характеристик AFC, статуса AFC, натяжений цепи, состояний отказа (например, провисания цепи, нулевого натяжения цепи, и т.д.), количества добытых ископаемых на конвейере, и т.д. В некоторых реализациях, пользовательским интерфейсным модулем 205 управляют в связи с одним или несколькими индикаторами 210 (например, LED), для обеспечения визуальной индикации статуса или состояний AFC.
[0025] Как указано выше, в некоторых вариантах осуществления, контроллер 200 выполнен с возможностью уменьшения величины провисания цепи с использованием одной или нескольких характеристик, связанных с AFC, для автоматического управления положением одного или нескольких гидравлических цилиндров. Контроллер 200 также выполнен с возможностью приема сигналов от одного или нескольких датчиков 220, связанных с одним или несколькими двигателями, одним или несколькими гидравлическими цилиндрами 225, одной или несколькими цепями, или другими компонентами AFC. Сигналы от датчиков 220 связаны, например, с угловым положением звездочки, угловой скоростью звездочки, угловым ускорением звездочки, отсчетом звеньев цепи, положением цепи, скоростью цепи, ускорением цепи, и т.д. Контроллер 200, при этом, обрабатывает и анализирует эти сигналы для определения величины провисания цепи.
[0026] В некоторых вариантах осуществления, контроллер 200 определяет величину провисания цепи и управляет положением гидравлического цилиндра 225 на основе сравнения характеристики первой звездочки или второй звездочки AFC 100 (например, ускорения звездочки) и характеристики цепи AFC 100 (например, ускорения цепи). В других вариантах осуществления, контроллер 200 определяет величину провисания цепи и управляет положением гидравлического цилиндра 225 на основе сравнения количества звеньев цепи, проходящих первое контролируемое положение AFC 100, и количества звеньев цепи, проходящих второе контролируемое положение AFC 100. В зависимости от определенной величины провисания цепи, одним или несколькими гидравлическими цилиндрами 225 управляют для увеличения или уменьшения расстояния между первой звездочкой и второй звездочкой с учетом величины провисания цепи. Посредством автоматического управления положением гидравлического цилиндра на основе определенной величины провисания цепи, провисание цепи может быть уменьшено или устранено.
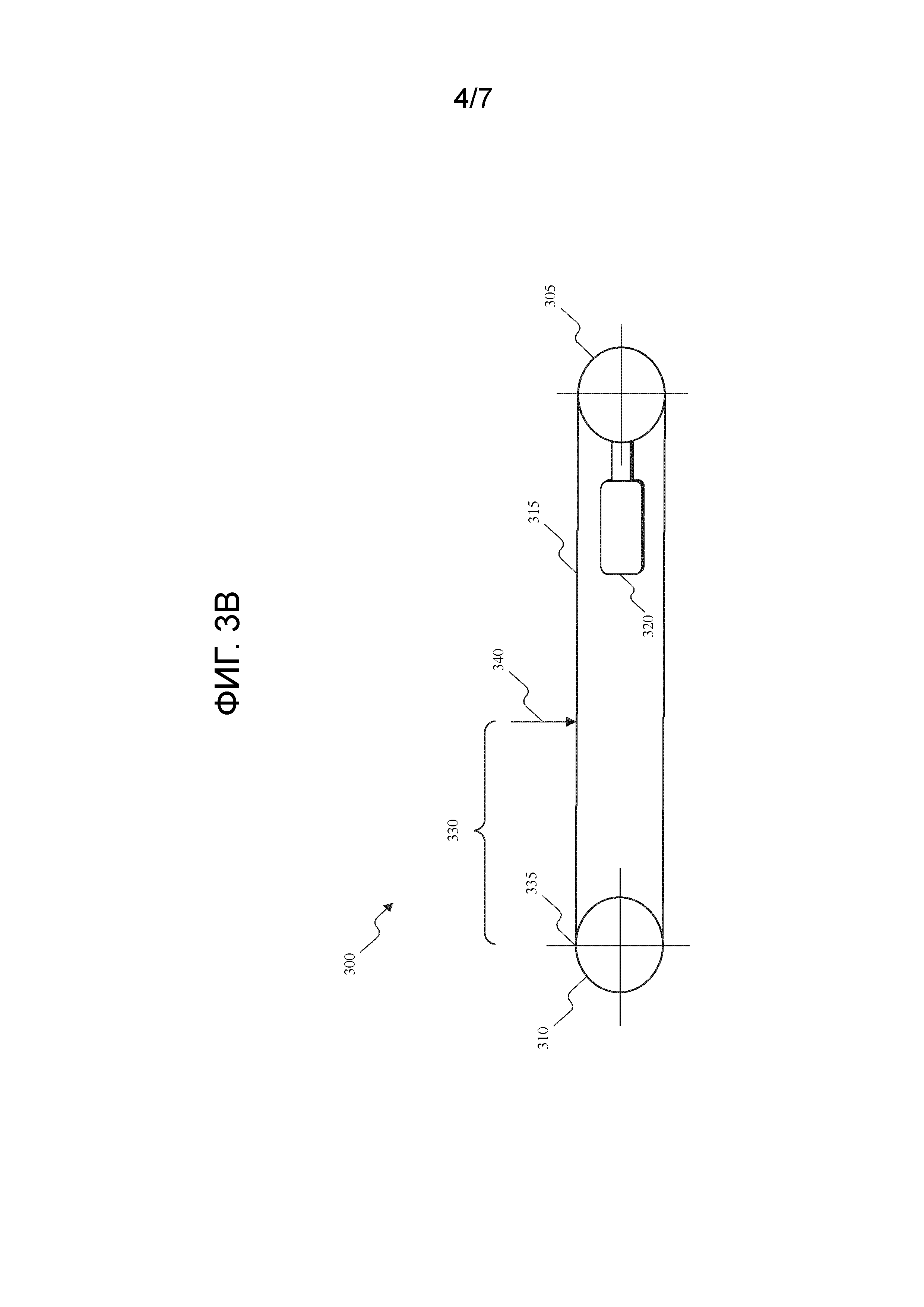
[0027] Обобщенная иллюстрация конвейера 300 для системы горных разработок показана на фиг. 3А. Конвейер 300 включает в себя первую звездочку или звездочку 305 основного штрека, вторую звездочку или звездочку 310 вспомогательного штрека, цепь 315, первый гидравлический цилиндр 320, второй гидравлический цилиндр 325, и контролируемую зону или «опасную зону» 330. Зона 330 иллюстративно показана в виде области между верхней мертвой точкой 335 (top-dead-center - “TDC”) второй звездочки 310 и точкой 340 загрузки (например, точкой на верхнем участке цепи, где ископаемые загружаются на конвейер). Зона 330 представляет собой участок цепи 315, который наиболее вероятно проявляет состояние провисания цепи (т.е., слабого натяжения). Величина избыточной цепи или провисания цепи 315 в зоне 330 может быть определена и использована для управления относительными положениями первой звездочки 305 и второй звездочки 310. Относительные положения звездочек могут быть изменены посредством управления первым гидравлическим цилиндром 320 и вторым гидравлическим цилиндром 325. Фиг. 3B и 3C показывают конвейеры согласно вариантам осуществления данного изобретения, которые включают в себя один гидравлический цилиндр, соединенный либо с первой звездочкой 305, либо со второй звездочкой 310.
[0028] Относительное расстояние между первой звездочкой 305 и второй звездочкой 310 может быть изменено или отрегулировано на основе множества условий. Например, положением (т.е., положением цилиндра) первого гидравлического цилиндра 320 или второго гидравлического цилиндра 325 можно управлять на основе характеристики первой звездочки 305 или второй звездочки 310 и характеристики цепи 315.
[0029] Конкретно, величина избыточной цепи или провисания цепи 315 связана с разницей между характеристикой первой звездочки 305 или второй звездочки 310 и характеристикой цепи 315. В некоторых вариантах осуществления, характеристика первой звездочки 305 или второй звездочки 310 является угловым положением звездочки, а характеристика цепи 315 является положением цепи. Угловое положение первой звездочки 305 или второй звездочки 310 относительно первого контролируемого положения может быть определено с использованием тахометра, и может быть определено угловое смещение звездочки. Тахометр обеспечивает сигнал, связанный с угловым расстоянием, на которое звездочка повернулась. Угловое расстояние может быть определено в радианах, градусах, или может быть преобразовано в метры. Положение цепи может быть определено с использованием датчика близости или инфракрасного воспринимающего устройства для восприятия перемещения цепи во втором контролируемом положении. Например, датчик близости может быть использован для прямого подсчета количества звеньев цепи, имеющих известный размер, скорость конвейера и таймер могут быть использованы для вычисления или определения смещения цепи 315 относительно второго контролируемого положения, и т.д. Контроллер 200, затем, вычисляет или определяет разницу между угловым положением звездочки и положением цепи (т.е., определяет разницу в смещении цепи как относительно первого положения, так и относительно второго положения). Разница в смещении представляет величину цепи, которая вошла в зону 330 и вышла из зоны 330. Контроллер 200, затем, вычисляет или определяет величину провисания цепи 315 посредством суммирования результата с предшествующими измерениями величины провисания цепи 315 с начала движения цепи 315. Сумма измерений провисания цепи 315 в зоне 330 может быть сохранена в памяти 255 и извлечена из нее.
[0030] В других вариантах осуществления, характеристика первой звездочки 305 или второй звездочки 310 является угловой скоростью звездочки, а характеристика цепи 315 является скоростью цепи. Как описано выше, тахометр, связанный с первой звездочкой 305 или второй звездочкой 310, может быть использован для определения углового расстояния, на которое повернулась звездочка. Производная углового расстояния (например, расстояние/ время) соответствует угловой скорости звездочки 305, 310. Мгновенная скорость цепи 315 в первом контролируемом положении может быть вычислена, при необходимости, на основе известного радиуса звездочки 305, 310. Скорость цепи может быть определена с использованием датчика близости или инфракрасного воспринимающего устройства для восприятия перемещения цепи во втором контролируемом положении. Например, датчик близости может быть использован для прямого подсчета количества звеньев цепи, имеющих известный размер, и таймер может быть использован для вычисления или определения скорости (например, расстояние/ время) цепи 315 относительно второго контролируемого положения. Контроллер 200 вычисляет или определяет разницу между угловой скоростью звездочки и скоростью цепи. Разница в скорости представляет собой скорость, с которой избыточная цепь или провисание цепи 315 накапливается или удаляется из зоны 330. Контроллер 200, затем, вычисляет или определяет величину провисания цепи 315 посредством умножения разницы в скорости на время (t) и суммирования результата с предшествующими измерениями величины провисания цепи 315 с начала движения цепи 315. Сумма измерений провисания цепи 315 в зоне 330 может быть сохранена в памяти 255 или извлечена из нее.
[0031] В других вариантах осуществления, характеристика первой звездочки 305 или второй звездочки 310 является угловым ускорением звездочки, а характеристика цепи 315 является ускорением цепи. Угловое ускорение звездочки или мгновенное ускорение звездочки в первом контролируемом положении может быть определено способом, подобным способу, описанному выше в отношении определения скорости звездочки с использованием тахометра (например, взятием производной от скорости). Подобным образом, ускорение цепи во втором контролируемом положении может быть определено с использованием датчика близости или инфракрасного устройства. Контроллер 200 вычисляет или определяет разницу между угловым ускорением звездочки и ускорением цепи (например, дифференциальное мгновенное ускорение). Разница в ускорении представляет собой скорость, с которой избыточная цепь или провисание цепи 315 накапливается или удаляется из зоны 330. Контроллер 200, затем, вычисляет или определяет величину провисания цепи 315 посредством умножения разницы в ускорении на время (t2) и суммирования результата с предшествующими измерениями величины провисания цепи 315 с начала движения цепи 315. Сумма измерений провисания цепи 315 в зоне 330 может быть сохранена в памяти 255 или извлечена из нее.
[0032] Дополнительно или альтернативно, контроллер 200 выполнен с возможностью вычисления или определения количества звеньев цепи, проходящих первое контролируемое положение и второе контролируемое положение, и сравнения количества звеньев цепи, проходящих первое контролируемое положение и второе контролируемое положение. Например, контроллер 200 принимает сигнал, связанный с количеством звеньев цепи, проходящих первое контролируемое положение, от первого датчика, и сигнал, связанный с количеством звеньев цепи, проходящих второе контролируемое положение, от второго датчика. В некоторых вариантах осуществления, контроллер 200 вычисляет или определяет количество звеньев цепи, проходящих первое контролируемое положение (например, TDC-точку 335) посредством, например, умножения угловой скорости звездочки на время контроля и, затем, деления результата на длину отдельного звена цепи (например, хранящуюся в памяти 255). В других вариантах осуществления, контроллер 200 вычисляет или определяет количество звеньев цепи, проходящих первое контролируемое положение, посредством деления изменения в угловом положении звездочки (например, преобразованного в метры) на длину отдельного звена цепи. Контроллер 200 вычисляет или определяет количество звеньев цепи, проходящих второе контролируемое положение (например, точку 340 загрузки), посредством умножения скорости цепи на время контроля и, затем, деления результата на длину отдельного звена цепи. В других вариантах осуществления контроллер 200 вычисляет или определяет количество звеньев цепи, проходящих первое контролируемое положение, посредством деления изменения или смещения в положении цепи на длину отдельного звена цепи. Контроллер 200 вычисляет или определяет величину провисания цепи 315 в виде разницы между количеством звеньев цепи, проходящих первое контролируемое положение, и количеством звеньев цепи, проходящих второе контролируемое положение.
[0033] Процессы 400 и 500 являются соответствующими и описаны здесь в отношении определения величины провисания цепи конвейера системы горных разработок. Различные этапы, описанные здесь в отношении процессов 400 и 500 могут быть выполнены одновременно, параллельно, или в порядке, который отличается от показанного последовательного способа выполнения. Процессы 400 и 500 могут быть также выполнены с использованием меньшего количества этапов, по сравнению с количеством этапов в показанном варианте осуществления. Дополнительно, хотя процессы 400 и 500 описаны по-отдельности, контроллер 200 выполнен с возможностью исполнения процессов 400 и 500 одновременно или вместе с другими процессами. Например, в некоторых вариантах осуществления, контроллер 200 выполнен с возможностью одновременного использования обоих процессов 400 и 500 для верификации определенной величины провисания цепи 315, для уменьшения возможности ошибки вследствие неисправности датчиков 220.
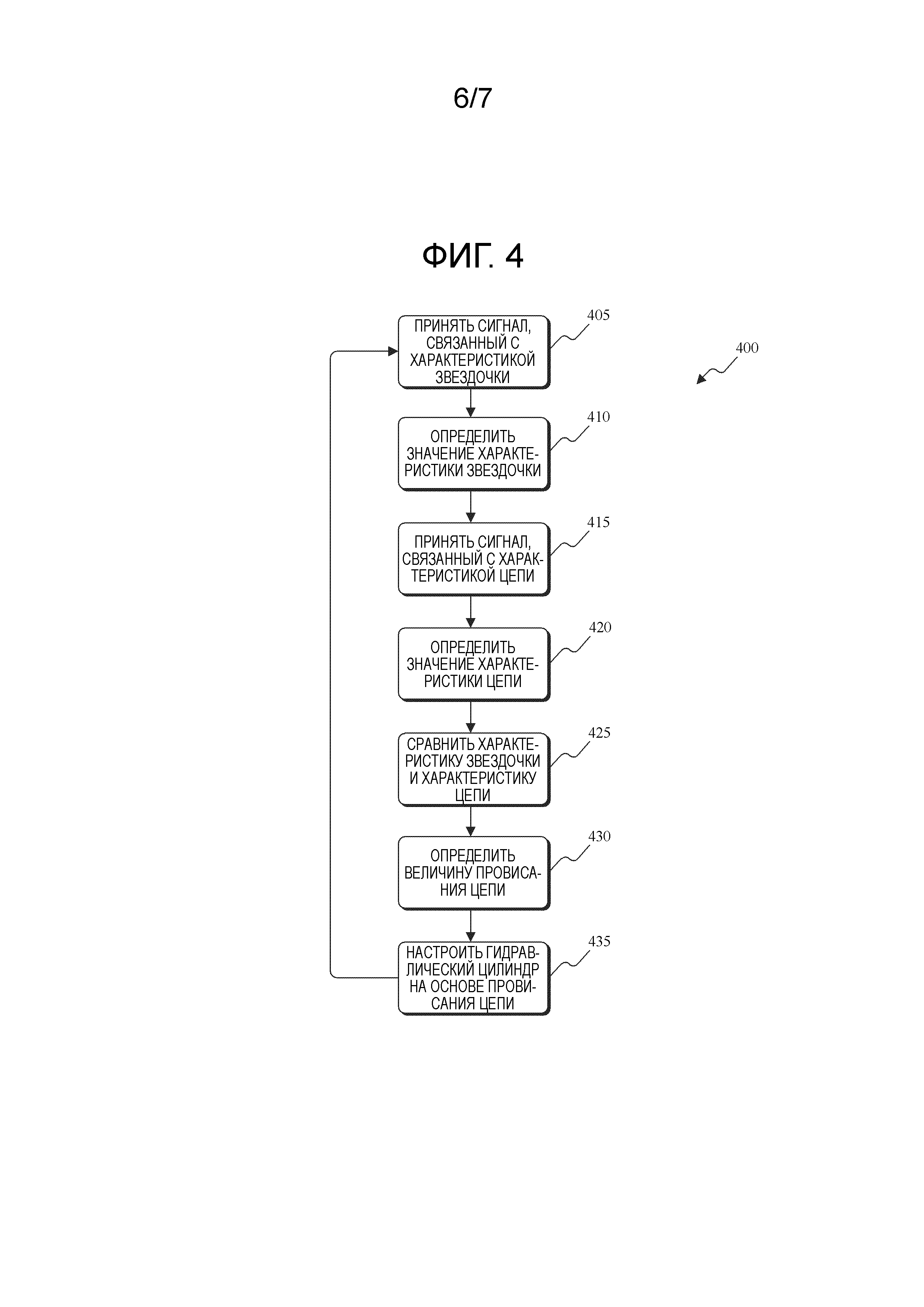
[0034] Фиг. 4 показывает процесс 400 для управления AFC. На этапе 405, сигнал, связанный с характеристикой по меньшей мере одной из первой звездочки 305 или второй звездочки 310, принимают посредством контроллера 200 от датчика, связанного со звездочкой. Как описано выше, характеристика звездочки является, например, угловым положением звездочки, угловой скоростью звездочки, угловым ускорением звездочки, и т.д. Контроллер 200, затем, определяет или вычисляет значение характеристики звездочки (этап 410). Значение характеристики звездочки может быть либо измерено прямо, посредством датчика 220, либо определено непрямо, на основе воспринятой характеристики (например, положения, скорости, и т.д.).
[0035] На этапе 415, сигнал, связанный с характеристикой цепи, принимают посредством контроллера 200 от датчика, связанного с цепью 315. Как описано выше, характеристика цепи является, например, положением цепи, скоростью цепи, ускорением цепи, и т.д. Контроллер 200, затем, определяет или вычисляет значение характеристики цепи (этап 420). Значение характеристики цепи может быть либо измерено прямо, посредством датчика 220, либо определено непрямо, на основе воспринятой характеристики (например, положения, скорости, и т.д.).
[0036] Разница между значениями характеристики звездочки и характеристики цепи может быть, затем, определена на основе сравнения значения характеристики звездочки и значения характеристики цепи (этап 425). Например, как описано выше, разница в ускорении может быть вычислена в виде разницы между угловым ускорением звездочки и ускорением цепи (при необходимости, могут быть применены известные преобразования из углового ускорения в линейное ускорение). На этапе 430, контроллер 200 определяет или вычисляет величину избыточной цепи или провисания цепи 315 в пределах зоны 330, на основе сравнения этапа 425, описанного выше. На основе величины избыточной цепи или провисания цепи 315, контроллер 200 генерирует один или несколько управляющих сигналов для настройки гидравлического цилиндра 320, 325 на новое положение (этап 435) для устранения провисания цепи.
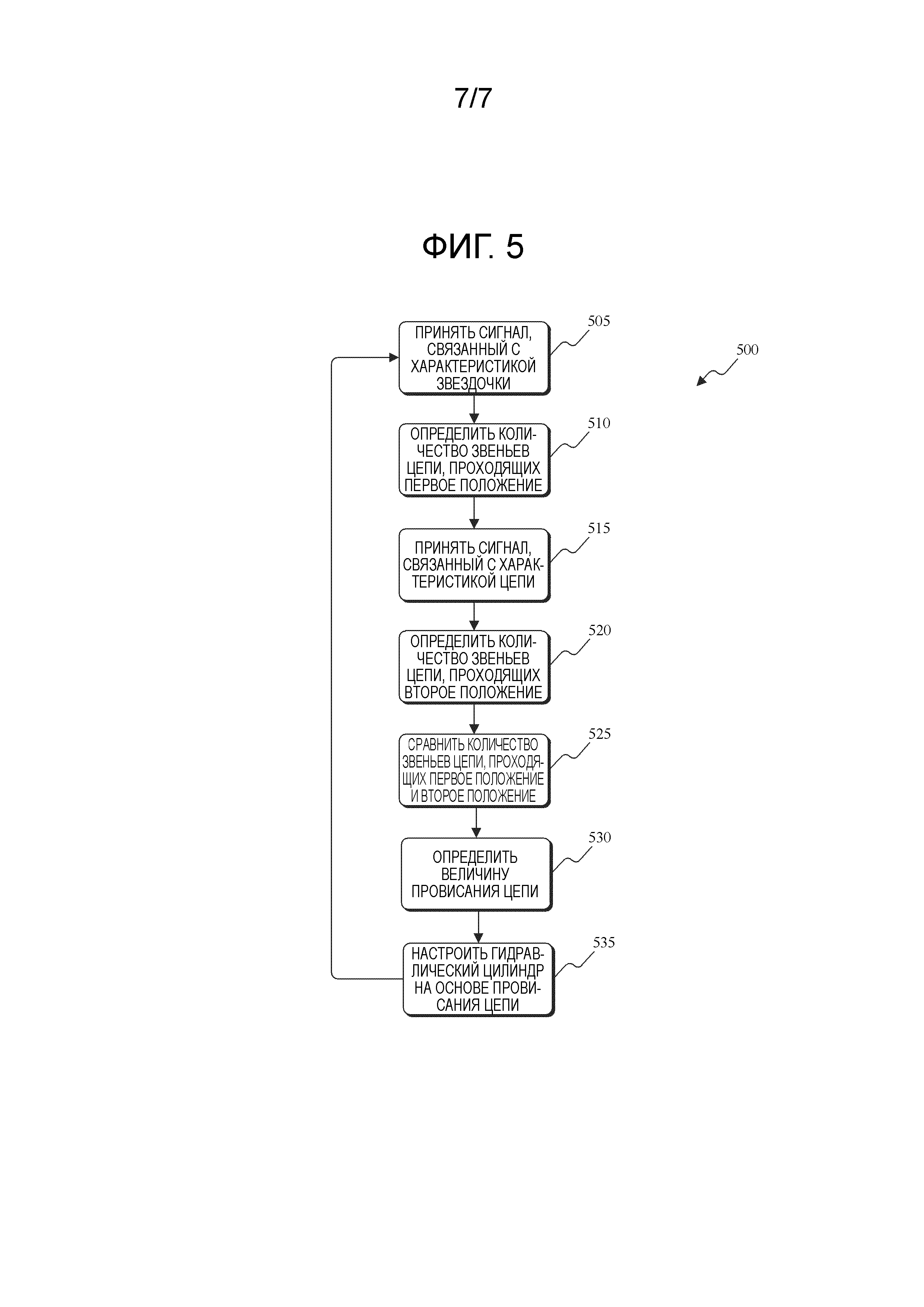
[0037] Фиг. 5 показывает процесс 500 для управления AFC. На этапе 505, сигнал, связанный с характеристикой по меньшей мере одной из первой звездочки 305 или второй звездочки 310, принимают посредством контроллера 200 от датчика, связанного со звездочкой. Как описано выше, характеристика звездочки является, например, угловым положением звездочки, угловой скоростью звездочки, угловым ускорением звездочки, и т.д. Контроллер 200, затем, определяет или вычисляет количество звеньев цепи, проходящих первое контролируемое положение (этап 510). Количество звеньев цепи, проходящих первое контролируемое положение, может быть определено или вычислено на основе известного размера звена цепи и углового смещения звездочки относительно первого контролируемого положения. На этапе 515, сигнал, связанный с характеристикой цепи, принимают посредством контроллера 200 от датчика, связанного с цепью 315. Контроллер 200, затем, определяет или вычисляет значение характеристики цепи (этап 420).
[0038] Как описано выше, положение цепи может быть определено с использованием датчика близости или инфракрасного воспринимающего устройства для восприятия перемещения цепи во втором контролируемом положении. Например, начало и конец звена цепи, имеющего известный размер, могут быть определены с использованием датчика близости, и контроллер 200 может прямо подсчитать количество звеньев цепи, проходящих второе контролируемое положение. Разница между количеством звеньев цепи, проходящих первое контролируемое положение, и количеством звеньев цепи, проходящих второе контролируемое положение, может быть, затем, определена на основе сравнения количества звеньев цепи, проходящих первое контролируемое положение, и количества звеньев цепи, проходящих второе контролируемое положение (этап 525). На этапе 530, контроллер 200 определяет или вычисляет величину избыточной цепи или провисания цепи 315 в пределах зоны 330, на основе сравнения этапа 525. На основе величины избыточной цепи или провисания цепи 315, контроллер 200 генерирует один или несколько управляющих сигналов для настройки гидравлического цилиндра 320, 325 на новое положение (этап 535) для устранения провисания цепи.
[0039] Таким образом, данное изобретение может, в общем, обеспечить, среди прочего, системы и способы для определения величины провисания цепи конвейера и соответствующего управления относительным расстоянием между первой звездочкой и второй звездочкой.
Мониторинг крепления кровли в системе сплошной разработки
Мониторинг горизонта для сплошной системы разработки
Управление конвейером в горнодобывающей системе
Карта конвейерной цепи для системы горной разработки
Панорамное изменение наклона в длиннозабойной врубовой системе
Система и способ отслеживания устойчивости кровли выработки с длинными забоями (варианты)
Конвейерный рештак
Управление производительностью горнодобывающей системы
Системы и способы для оценки подземных дорожных условий с использованием акселерометров
Система и способ обнаружения затупленных и изношенных резцов
Управление конвейером в горнодобывающей системе
Карта конвейерной цепи для системы горной разработки
Конвейерный рештак
Управление производительностью горнодобывающей системы
Обнаружение и управление проскальзыванием конвейера
Управление конвейером в системе разработки месторождений

