Результат интеллектуальной деятельности: Перегружатель гидравлический полноповоротный с дополнительным противовесом
Вид РИД
Изобретение
Заявленное изобретение относится к плавучим кранам, предназначенным для проведения работ по перегрузке сыпучих, штучных, пылеобразных и мокрых материалов из различных судов и барж на береговой склад.
В настоящее время известные в мире плавучие краны (далее – перегружатели) спроектированы так, чтобы при работе избежать максимальных кренящих нагрузок, приводящие к опрокидыванию судна, на которых они установлены. Для увеличения грузоподъемности перегружателя на них устанавливают активный противовес, изменяющий свои противовесные характеристики в зависимости от вылета стрелы, однако такие конструкции не могут учитывать фактическую массу взятого грузозахватным устройством перегружателя груза. Данное обстоятельство приводит к ограничению максимальной возможной грузоподъемности перегружателя, установленного на судно, например, судно-понтон.
При современных возможностях электроники возможна установка на перегружателе дополнительного противовеса, положение которого будет изменяться в реальном времени не только в зависимости от того, на каком вылете стрелы работает перегружатель, но и в зависимости от фактической массы груза, захваченного грузозахватным устройством перегружателя, которая (фактическая масса груза) постоянно изменяется во время перегрузочных работ. При этом в большинстве случаев при захвате груза, например, с пришвартованного судна, вылет стрелы перегружателя является минимальным или средним, а при выгрузке груза на берег вылет стрелы в большинстве случаев максимальный, так как это позволяет выгрузить на полезную площадь берега больше груза. Таким образом, кренящие нагрузки на судно-понтон с перегружателем постоянно изменяются в реальном времени при движении стрелы крана от пришвартованного судна до места выгрузки груза на берег, при этом, чем больше вылет стрелы и масса груза, тем больше кренящие нагрузки. Заявленная конструкция, содержащая дополнительный противовес, положение которого изменяется в реальном времени при помощи электронного блока управления в автоматическом режиме в зависимости не только от вылета стрелы, но и от фактической массы взятого груза, позволяет значительно снизить кренящие нагрузки на судно-понтон с перегружателем, что, в свою очередь, позволяет увеличить грузоподъемность перегружателя.
Из исследованного заявителем уровня техники выявлено изобретение по патенту № CA1090301 (A) ― 1980-11-25 «Arrangement for increasing crane» («Устройство для повышения возможностей крана»), Сущностью известного технического решения является кран, имеющий кузов, поддерживаемый парой гусеничных сборок, и верхнюю палубу на кузове автомобиля, устанавливающую стрелу на одном конце и нормальный противовес на другом конце, и средства, с помощью которых была увеличена грузоподъемность крана. Упомянутое средство содержит дополнительный элемент противовеса, прикрепленный к указанному нормальному противовесу и образующий его часть, и пару грузиков вспомогательного кузова по существу коробчатой формы, прикрепленных к передней и задней части кузова между концами упомянутых гусеничных узлов таким образом, чтобы составлять взвешенные продолжения кузова.
Недостатком известного технического решения является невозможность в реальном времени изменять характеристики противовеса в зависимости от массы груза.
Из исследованного заявителем уровня техники выявлено изобретение по Авторскому свидетельству СССР № 8908 «Автоматически уравновешивающийся подъемный кран». Сущностью известного технического решения является автоматически уравновешивающийся подъемный кран, характеризующийся применением прикрепленной к поперечине или стреле пружины В, к свободному концу которой присоединяются конец грузового каната и зубчатая рейка Е, сцепляющаяся посредством зубчаток К и L с зубчатой рейкой N, прикрепленной к подвижному противовесу G, благодаря указанной связи перемещающемуся в горизонтальном направлении, с изменением величины натяжения конца грузового каната, прикрепленного к пружине, с целью достижения автоматического уравновешивания крана и возможности установки его на тележке.
Таким образом, известное изобретение касается автоматически уравновешивающегося крана, установленного на тележке, и имеющего противовес, перемещающийся в горизонтальном направлении при изменении величины натяжения грузового каната.
Недостатком известного технического решения является то, что автоматическое уравновешивание не может осуществляться при разных вылетах стрелы. В известном устройстве кран уравновешивается только при одном постоянном положении стрелы.
Из исследованного заявителем уровня техники выявлено изобретение по Авторскому свидетельству СССР № 719085 «Плавучий кран». Сущностью известного технического решения является плавучий кран, содержащий понтон с установленными на нем стрелой и приводами ее поворота, вылета и подъема груза, а также командоаппарат, уравнительные цистерны правого и левого бортов с насосами, подключенными к судовой сети питания, блоки управления приводов подъема груза, вылета и поворота стрелы, реле изменения крена и датчик крена, включающий кренометр и реле крена левого и правого борта, отличающийся тем, что, с целью водоизмещения плавучего крана, его осадки и габаритов при сохранении величины вылета стрелы с грузом, кран снабжен задатчиком допустимого угла крена и устройством сравнения углов крена, при этом блоки управления приводами подъема груза, вылета и поворота стрелы подключены к выходу устройства сравнения углов крена, один вход которого подключен к кренометру, а второй - к задатчику допустимого угла крена, причем насосы уравнительных цистерн левого и правого бортов подключены к судовой сети питания соответственно через реле крена левого и правого бортов.
Таким образом, в известном техническом решении устранение крена судна при перегрузке груза осуществляется путем установки балластных цистерн по левому и правому борту судна, которые заполняются/опустошаются в зависимости от крена судна.
Недостатком известного технического решения является необходимость при работе перекачивать между балластными цистернами большое количество воды, и, как следствие, при ограниченной производительности водяных насосов ограничивать скорость выгрузки, в том числе до полной остановки крана при процессе устранения крена, исходя из описания известного изобретения.
Из исследованного заявителем уровня техники известно изобретение по авторскому свидетельству СССР № 1765103 «Плавучий кран». Сущностью известного технического решения является плавучий кран, содержащий плавучее основание и поворотную платформу со стойкой, установленную на последней с возможностью поворота в вертикальной плоскости стрелу с грузовым полиспастом, устройство изменения вылета стрелы, включающее в себя установленный с возможностью вертикального перемещения противовес, связанный с ним концом и связанный со стрелою трос, установленные с возможностью взаимодействия с последним на верхней части стойки обводные блоки и связанный с тросом своим тяговым органом привод, смонтированный на поворотной платформе, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, механизм изменения вылета стрелы снабжен дополнительным обводным блоком, установленным между основными с возможностью опирания на трос и соединенным с тяговым органом привода, а противовес выполнен в виде колокола с обратным клапаном и расположен с возможностью размещения в жидкости своей нижней частью в рабочем режиме.
Недостатком известного технического решения является то, что в известной конструкции отсутствует полноповоротность крана.
При этом заявитель отмечает, что общим недостатком всех описанных выше аналогов является то, что в них так или иначе используются канаты (тросы) в приводе/управлении дополнительных противовесов. Заявленное же техническое решение использует в качестве привода гидравлическое управление, что дает более высокую скорость передвижения исполнительных механизмов и отсутствие необходимости применения многочисленных редукторов, что, в свою очередь, упрощает конструкцию перегружателя.
Наиболее близким по совокупности существенных признаков, выбранным заявителем в качестве прототипа, является полезная модель по патенту РФ № 144147 «Перегружатель полноповоротный». Сущностью прототипа является перегружатель полноповоротный, включающий стрелу, основной сегмент которой снабжен гидроприводом его поворота, установлен посредством основного несущего шарнира с горизонтальной осью на полноповоротном круге с вертикальной осью и приводом его поворота, при этом более короткий от оси его поворота конец основного сегмента стрелы соединен посредством шарнира с концом противовеса, снабженного гидроприводом его поворота, другим своим концом соединенного шарниром с концом тяги, параллельной основному сегменту стрелы и соединенной другим своим концом шарниром с концом дополнительного сегмента стрелы, который в свою очередь соединен шарниром с более длинным от оси его поворота концом основного сегмента стрелы, причем оси вышеуказанных шарниров, соединяющих элементы стрелы, параллельны оси основного несущего шарнира, а к свободному концу дополнительного сегмента стрелы присоединено посредством шарниров с горизонтальной и вертикальной осями захватное устройство, например, грейфер, снабженное гидроприводами его поворота относительно этих осей и гидроприводами его частей для захвата груза, отличающийся тем, что полноповоротный круг установлен на колонне, жестко закрепленной на главной палубе судна-понтона, снабженного сваями, установленными в направляющих колодцах в носу и в корме судна-понтона по каждому его борту и фиксирующими устройствами каждой сваи в различных ее положениях по высоте.
Недостатками прототипа является:
- недостаточная грузоподъемность перегружателя из-за отсутствия дополнительного активного противовеса;
- колонна, на которой установлен полноповоротный круг, не ограничена по высоте, что ограничивает беспрепятственное прохождение перегружателя по судовым путям под речными и морскими мостами;
- на корпус судна действуют большие нагрузки во время погрузочно-разгрузочных работ при волнении из-за наличия четырех свай, установленных в направляющих колодцах в носу и в корме судна-понтона по каждому его борту, жестко крепящих корпус понтона, что приводит к повреждению самих свай и корпуса понтона при волнении, в отличие от заявленного технического решения, в котором две сваи расположены в диаметральной плоскости судна в носу и корме, что позволяет судну-понтону крениться без повреждения корпуса и самих свай, при этом излишний крен нивелируется дополнительным активным противовесом, управляемым электронным блоком управления в автоматическом режиме в зависимости как от положения перегружателя в пространстве, так и от фактической массы перегружаемого груза;
- захватное устройство, например грейфер, снабжено гидроприводом поворота относительно горизонтальной и вертикальной осей, в отличие от заявленного технического решения, которое снабжено гидроприводом поворота захватного устройства только относительно вертикальной оси захвата, что дает упрощение конструкции. При этом заявитель выражает мнение, что как в прототипе, так и в заявленном техническом решении отсутствует практическая необходимость в гидроприводе поворота захватного устройства относительно горизонтальной оси захвата, так как относительно горизонтальной оси захватное устройство движется свободно под влиянием собственной массы.
Задачей и техническим результатом заявленного технического решения является устранение недостатков прототипа и расширение технологических возможностей перегружателя, а именно:
- увеличение грузоподъемности перегружателя благодаря установке дополнительного противовеса, управляемого электронным блоком управления в автоматическом режиме в зависимости от фактической массы перегружаемого груза и положения стрелы перегружателя в пространстве, что дает возможность увеличения массы груза, не увеличивая предельно допустимый крен судна;
- обеспечение возможности беспрепятственного прохождения перегружателя по магистральным и сверхмагистральным судовым путям под речными и морскими мостами путем ограничения высоты колонны, на которой установлен полноповоротный круг, таким образом, чтобы общая высота заявленной конструкции не превышала высоты пролета мостов в походном положении перегружателя (в зависимости от требований потребителя, исходя из планируемого использования заявленного перегружателя на тех или иных судовых путях);
- снижение нагрузок на корпус судна-понтона во время погрузочно-разгрузочных работ при волнении путем установки двух свай (в отличие от 4-х по прототипу по каждому борту), установленных в направляющих колодцах в носу и корме судна-понтона в диаметральной плоскости судна [https://ru.wikipedia.org/wiki/диаметральная плоскость судна], позволяющих (сваи) понтону крениться без повреждения корпуса и самих свай, при этом излишний крен нивелируется дополнительным активным противовесом, управляемым электронным блоком управления в автоматическом режиме в зависимости от фактической массы и объема перегружаемого груза и положения стрелы перегружателя в пространстве;
- упрощение конструкции перегружателя по сравнению с прототипом путем выполнения перегружателя с гидроприводом поворота захватного устройства, например, грейфера, только относительно вертикальной оси захвата, в отличие от прототипа, которое снабжено гидроприводом поворота относительно горизонтальной и вертикальной осей. При этом заявитель выражает мнение, что, как в прототипе, так и в заявленном техническом решении отсутствует практическая необходимость в гидроприводе поворота захватного устройства относительно горизонтальной оси захвата, так как относительно горизонтальной оси захватное устройство движется свободно под влиянием собственной массы.
Сущностью заявленного технического решения является перегружатель гидравлический полноповоротный с дополнительным противовесом, включающий стрелу, основной сегмент которой снабжен гидроприводом его поворота, установлен посредством основного несущего шарнира с горизонтальной осью на полноповоротном круге с вертикальной осью и приводом его поворота, при этом более короткий от оси его поворота конец основного сегмента стрелы соединен посредством шарнира с концом основного противовеса, снабженного гидроприводом его поворота, другим своим концом соединенного шарниром с концом тяги, параллельной основному сегменту стрелы и соединенной другим своим концом шарниром с концом дополнительного сегмента стрелы, который в свою очередь соединен шарниром с более длинным от оси его поворота концом основного сегмента стрелы, причем оси вышеуказанных шарниров, соединяющих элементы стрелы, параллельны оси основного несущего шарнира, а к свободному концу дополнительного сегмента стрелы присоединено посредством шарниров с горизонтальной и вертикальной осями захватное устройство, например, грейфер, снабженное гидроприводом его поворота относительно вертикальной оси захвата и гидроприводами его частей для захвата груза, полноповоротный круг установлен на колонне, жестко закрепленной на главной палубе судна-понтона, снабженного сваями, установленными в направляющих колодцах в носу и в корме судна-понтона и фиксирующими устройствами каждой сваи в различных ее положениях по высоте, отличающийся тем, что захватное устройство, например, грейфер, присоединенное к свободному концу дополнительного сегмента стрелы посредством шарниров с горизонтальной и вертикальной осями, снабжено гидроприводом его поворота относительно вертикальной оси захвата; высота колонны, на которой установлен полноповоротный круг, выполнена такой, чтобы общая высота конструкции не превышала высоты пролета мостов в походном положении перегружателя с возможностью беспрепятственного прохождения по судовым путям под речными и морскими мостами; сваи установлены в направляющих колодцах в носу и в корме судна-понтона в диаметральной плоскости судна; перегружатель снабжен дополнительным противовесом, соединенным посредством шарнира с более коротким от оси поворота концом основного сегмента стрелы и снабженным гидроприводом его поворота, дополнительный противовес выполнен с возможностью управления электронным блоком управления в автоматическом режиме в зависимости от положения перегружателя в пространстве, причем ось вращения шарнира дополнительного противовеса параллельна оси вращения главного противовеса.
Заявленное техническое решение иллюстрируется Фиг.1 – Фиг.4.
На Фиг.1 представлен общий вид заявленного перегружателя.
На Фиг.2 представлен вид перегружателя сверху.
На Фиг.3 представлена вид сваи в колодце.
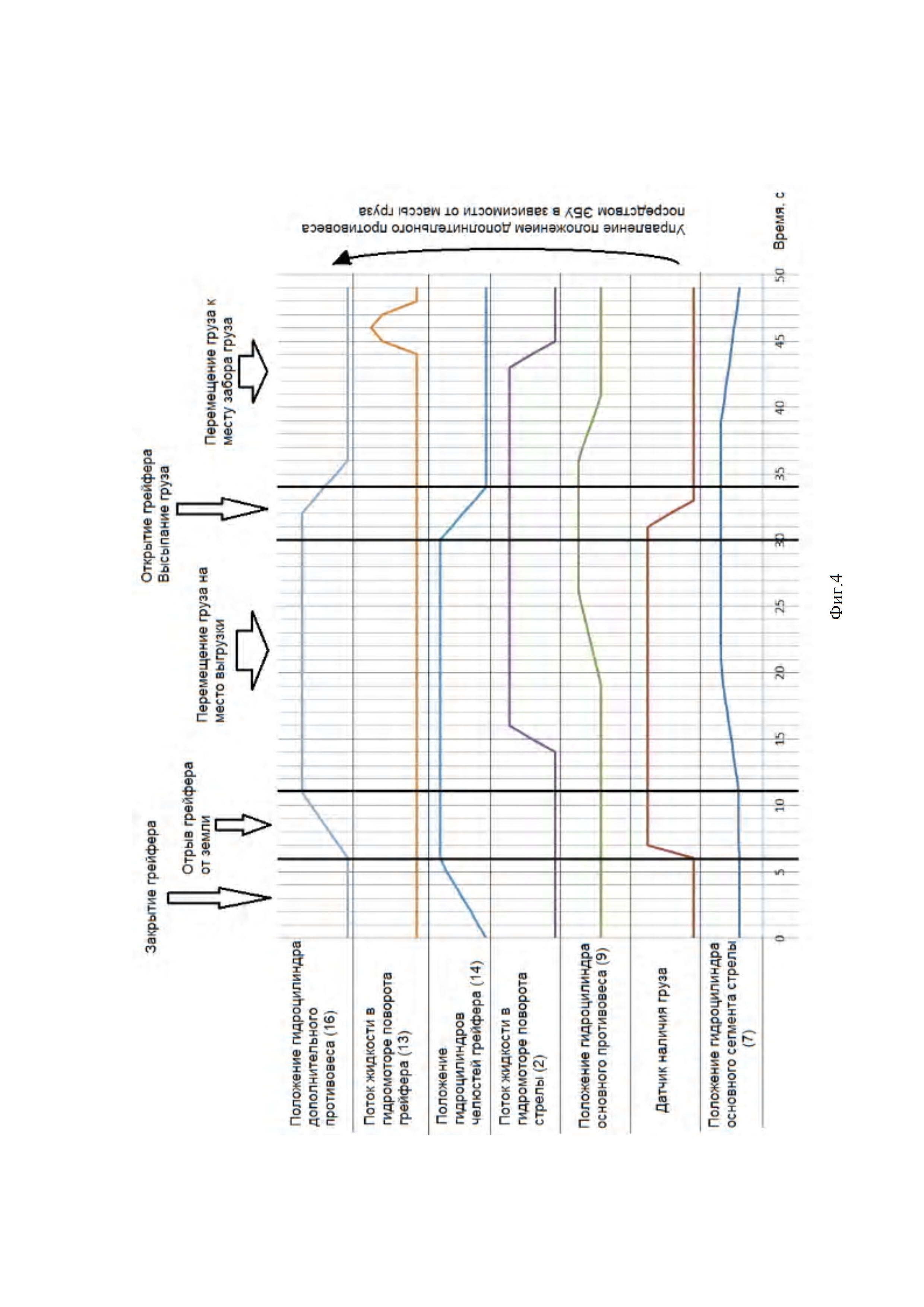
На Фиг.4 приведены временные диаграммы гидроприводов во время работы стандартного рабочего цикла перевалки насыпного груза.
Позиции на фигурах обозначают:
1 – верхнее строение;
2 – полноповоротный круг;
3 – колонна;
4 – главная палуба;
5 – судно-понтон;
6 – основной сегмент стрелы;
7 – гидропривод поворота основного сегмента стрелы;
8 – основной противовес;
9 – гидропривод основного противовеса;
10 – тяга;
11 – дополнительный сегмент стрелы;
12 – захватное устройство, например, грейфер;
13 – гидропривод поворота захватного устройства, например, грейфера;
14 – гидропривод раздвижных частей;
15 – дополнительный противовес
16 – гидропривод дополнительного противовеса;
17 – съемные сваи;
18 – направляющие колодцы;
19 – сквозные отверстия в свае для штырьевого фиксирующего устройства;
20 – штырь.
Ниже заявителем приведено описание конструкции заявленного технического решения.
Заявленное устройство включает перегружатель гидравлический полноповоротный, установленный на судне-понтоне.
Перегружатель гидравлический полноповоротный включает верхнее строение 1 с полноповоротным кругом 2, установленным с возможностью поворота в горизонтальной плоскости относительно вертикальной оси посредством привода (не показаны) на колонне 3. Последняя закреплена на главной палубе 4 судна-понтона 5. Высота колонны 3 выполнена такой, чтобы общая высота заявленной конструкции не превышала высоту пролета мостов в походном положении перегружателя, чтобы обеспечить беспрепятственное прохождение по судовым путям под речными и морскими мостами, в зависимости от требований потребителя, исходя из планируемого использования заявленного перегружателя на тех или иных судовых путях. Например, при прохождении по судовым путям Российской Федерации общая высота заявленной установки не должна превышать 13,2 метров, что гарантирует возможность перемещения судна по участкам сверхмагистральных и магистральных внутренних водных путей РФ 1, 2, 3 класса, по которым перемещаются основная масса перевозимых грузов (ГОСТ 26775-97 «Габариты подмостовые судоходных пролетов мостов на внутренних водных путях. Нормы и технические требования»). При изготовлении заявленного перегружателя для зарубежных потребителей высота заявленной установки будет соответствовать нормативным требованиям к габаритам подмостовых судоходных пролетов мостов данной страны. В связи с изложенным выше, заявитель в формуле изобретения указывает не конкретную высоту заявленной установки, а то, что высота колонны, на которой установлен полноповоротный круг, выполнена такой, чтобы общая высота конструкции не превышала высоту пролета мостов в походном положении перегружателя для обеспечения беспрепятственного прохождения по судовым путям под речными и морскими мостами. Это обеспечивает использование заявленной установки на любых водных путях мира.
Верхнее строение 1 включает элементы стрелы, соединенные между собой шарнирами с возможностью их поворота в вертикальной плоскости. При этом основной сегмент 6 стрелы соединен основным несущим шарниром с кругом 2 и снабжен гидроприводом 7 его поворота.
Один конец основного сегмента 6 позади круга 2 соединен шарниром с концом основного противовеса 8, снабженного гидроприводом 9. Другой конец основного противовеса 8 соединен шарниром с концом тяги 10, параллельной основному сегменту 6. Другой конец тяги 10 соединен шарниром с концом дополнительного сегмента 11 стрелы верхнего строения 1, в свою очередь, соединенного шарниром с другим, более длинным от оси его поворота, концом основного сегмента 6 стрелы. Свободный конец дополнительного сегмента стрелы 11 соединен с захватным устройством, например, грейфером 12, снабженного гидроприводом поворота грейфера относительно вертикальной оси захвата 13 и гидроприводом его раздвижных частей 14. Перегружатель выполнен с дополнительным противовесом 15, соединенным посредством шарнира с более коротким от оси поворота концом основного сегмента 6 стрелы и снабженным гидроприводом его поворота 16. Дополнительный противовес 15 выполнен с возможностью управления электронным блоком управления (на Фиг. не показан) в автоматическом режиме в зависимости от положения перегружателя в пространстве, причем ось вращения шарнира дополнительного противовеса 15 параллельна оси вращения главного противовеса.
Электронный блок управления (ЭБУ) представляет из себя контроллер с возможностью анализировать информацию, полученную от датчиков измерения массы груза и датчиков положения перегружателя в пространстве (на Фиг. не показаны).
Судно-понтон 5 снабжено съемными сваями 17 по одной на носу и на корме в диаметральной плоскости судна, установленными в направляющих колодцах 18, снабженных упругими элементами (на Фиг. не указаны), которые выполняют функцию демпфера. Каждая свая снабжена штырьевым (фиксирующим) устройством, включающим сквозные отверстия 19 в свае, выполненные на заданном расстоянии друг от друга и сопряженный с ними штырь 20, который может свободно быть вставлен в эти отверстия.
Ниже заявителем приведено осуществление работы заявленного технического решения.
Судно-понтон 5 подводится к берегу к месту выполнения разгрузочных работ, сваи 17 поочередно захватываются захватным устройством, например, грейфером 12 погрузчика, устанавливаются в колодцы 18, вдавливаются в грунт собственным весом или с помощью погрузчика. В отверстие 19 каждой сваи 17, расположенное выше уровня главной палубы, вставляют штырь 20 для предотвращения самопроизвольного погружения сваи в мягкий грунт.
Далее к судну-понтону пришвартовывается бункерное судно (не показано) с грузом.
Управляя гидроприводами 7, 9, гидроприводами захватного устройства, например, грейфера 12 (не показаны) и приводом круга 2 оператор осуществляет необходимый поворот элементов 2, 6, 8, 10, 11, 12 верхнего строения 1 в нужную сторону, обеспечивая жесткую адресную подачу грейфера 12 для забора груза и последующую его разгрузку.
При этом при включении привода поворотного круга 2, последний, несущий стрелу верхнего строения 1, обеспечивает ее поворот и фиксацию в нужном положении и (при необходимости) полный поворот в горизонтальной плоскости.
При приведении в действие оператором гидропривода 7 последний поворачивает стрелу в вертикальной плоскости и фиксирует ее в нужном положении.
При приведении в действие гидропривода 9, последний поворачивает основной противовес 8, соединенный шарниром с концом основного сегмента 6 стрелы. Основной противовес 8, выполняя роль рычага, связанного другим концом посредством шарниров и тяги 10 с концом дополнительного сегмента 11 стрелы, поворачивает и фиксирует ее в нужном оператору положении.
При приведении в действие гидропривода 16 посредством электронного блока управления (ЭБУ), гидропривод 16 поворачивает дополнительный противовес 15, соединенный посредством шарнира с более коротким от оси поворота концом основного сегмента 6 стрелы. При этом дополнительный противовес 15 управляется электронным блоком управления в автоматическом режиме в зависимости от положения перегружателя в пространстве, в том числе в зависимости от крена судна-понтона при волнении, изменении веса и положения в пространстве захватного устройства, например, грейфера. При этом ось вращения шарнира дополнительного противовеса 15 параллельна оси вращения основного противовеса 8.
Принцип действия электронного блока управления (ЭБУ) заключается в том, что он (ЭБУ) анализирует информацию, полученную от датчиков измерения массы груза и датчиков положения перегружателя в пространстве (на Фиг. не показаны), и генерирует управляющие сигналы на электрический гидрораспределитель (на Фиг. не показан), управляя потоками рабочей жидкости к гидроприводу 16 дополнительного противовеса 15.
Дополнительный сегмент 11 поворачивается относительно шарнира, соединяющего его с концом основного сегмента 6 стрелы.
Далее оператор, управляя гидроприводом (не показан) захватного устройства, например, грейфера 12, устанавливает его в наиболее удобное положение, обеспечивающее возможность его максимальной загрузки.
На Фиг.4 приведены временные диаграммы гидроприводов, во время работы стандартного рабочего цикла перевалки насыпного груза. Из диаграмм, в частности, видно, как от наличия груза (датчик наличия груза, измеряющий его массу) изменяется положение гидроцилиндра дополнительного противовеса, управляемого ЭБУ.
Таким образом, из описанного выше можно сделать логический вывод, что заявителем достигнуты поставленные задачи и заявленный технический результат путем заявленной совокупности существенных признаков, включенных в формулу изобретения, а именно:
- обеспечена возможность беспрепятственное прохождения перегружателя по судовым путям под речными и морскими мостами путем ограничения высоты колонны, на которой установлен полноповоротный круг, таким образом, чтобы общая высота заявленной конструкции не превышала высоты пролета мостов в походном положении перегружателя (в зависимости от требований потребителя, исходя из планируемого использования заявленного перегружателя на тех или иных судовых путях);
- снижены нагрузки на корпус судна-понтона во время погрузочно-разгрузочных работ при волнении путем установки двух свай (в отличие от 4-х по прототипу, жестко крепящих корпус судна-понтона), установленных в направляющих колодцах по одной в носу и корме судна-понтона в диаметральной плоскости судна, позволяющих (сваи) судну-понтону крениться без повреждения самих свай и корпуса судна-понтона, при этом излишний крен нивелируется дополнительным активным противовесом, управляемым электронным блоком управления в автоматическом режиме в зависимости от положения перегружателя в пространстве;
- упрощена конструкция заявленного перегружателя по сравнению с прототипом путем выполнения перегружателя с гидроприводом поворота захватного устройства, например, грейфера, только относительно вертикальной оси захвата, в отличие от прототипа, которое снабжено гидроприводом поворота относительно горизонтальной и вертикальной осей. При этом заявитель отмечает, что, как в прототипе, так и в заявленном техническом решении отсутствует практическая необходимость в гидроприводе поворота захватного устройства относительно горизонтальной оси захвата, так как относительно горизонтальной оси захватное устройство движется свободно под влиянием собственной массы.
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, так как из исследованного уровня техники не выявлены технические решения, обладающие заявленной совокупностью признаков, приведенных в независимом пункте формулы, обеспечивающих достижение заявленных результатов.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, так как разработан, по мнению заявителя, принципиально новый перегружатель с неизвестной до даты представления настоящей заявки совокупностью существенных признаков, что обеспечивает значительное превосходство заявленного технического решения над возможностями известных перегружателей. Из исследованного заявителем уровня техники не выявлены технические решения с заявленной совокупностью существенных признаков, приведенных в независимом пункте формулы заявленного технического решения, и не выявлен суммарный технический результат, реализуемый посредством применения совокупности указанных признаков.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, так как может осуществлено на стандартном предприятии с использованием известных технических средств.
Перегружатель гидравлический полноповоротный с дополнительным противовесом, включающий стрелу, основной сегмент которой снабжен гидроприводом его поворота, установлен посредством основного несущего шарнира с горизонтальной осью на полноповоротном круге с вертикальной осью и приводом его поворота, при этом более короткий от оси его поворота конец основного сегмента стрелы соединен посредством шарнира с концом основного противовеса, снабженного гидроприводом его поворота, другим своим концом соединенного шарниром с концом тяги, параллельной основному сегменту стрелы и соединенной другим своим концом шарниром с концом дополнительного сегмента стрелы, который в свою очередь соединен шарниром с более длинным от оси его поворота концом основного сегмента стрелы, причем оси вышеуказанных шарниров, соединяющих элементы стрелы, параллельны оси основного несущего шарнира, а к свободному концу дополнительного сегмента стрелы присоединено посредством шарниров с горизонтальной и вертикальной осями захватное устройство, например грейфер, снабженное гидроприводом его поворота относительно вертикальной оси захвата и гидроприводами его частей для захвата груза, полноповоротный круг установлен на колонне, жестко закрепленной на главной палубе судна-понтона, снабженного сваями, установленными в направляющих колодцах в носу и в корме судна-понтона и фиксирующими устройствами каждой сваи в различных ее положениях по высоте, отличающийся тем, что захватное устройство, например грейфер, присоединенное к свободному концу дополнительного сегмента стрелы посредством шарниров с горизонтальной и вертикальной осями, снабжено гидроприводом его поворота относительно вертикальной оси захвата; высота колонны, на которой установлен полноповоротный круг, выполнена такой, чтобы общая высота конструкции не превышала высоты пролета мостов в походном положении перегружателя с возможностью беспрепятственного прохождения по судовым путям под речными и морскими мостами; сваи установлены в направляющих колодцах в носу и в корме судна-понтона в диаметральной плоскости судна; перегружатель снабжен дополнительным противовесом, соединенным посредством шарнира с более коротким от оси поворота концом основного сегмента стрелы и снабженным гидроприводом его поворота, дополнительный противовес выполнен с возможностью управления электронным блоком управления в автоматическом режиме в зависимости от положения перегружателя в пространстве, причем ось вращения шарнира дополнительного противовеса параллельна оси вращения главного противовеса.