Результат интеллектуальной деятельности: КОНВЕРТОПЛАН
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[1] Варианты осуществления изобретения относятся к конвертоплану (CRA), который способен переходить из режима полета самолета в режим полета вертолета и наоборот, как во время полета, так и на земле.
УРОВЕНЬ ТЕХНИКИ
[2] Существует многолетний интерес к разработке конвертопланов, которые сочетают в себе возможности вертолета - VTOL (вертикальный взлет и посадка) и возможности зависать, с дальностью полета и высокой скоростью полета самолета. Конвертопланы обычно содержат по меньшей мере один узел поворотного несуще-тянущего винта (TPА), который содержит несуще-тянущий винт, приводимый в действие с помощью обеспечивающего вращения двигателя, установленного в гондоле (REP), который является поворотным для изменения оси вращения несуще-тянущего винта между режимом самолета для обеспечения высокоскоростного горизонтального полета, и режимом вертолета для обеспечения полета в вертикальной плоскости и/или VTOL. Несуще-тянущий винт представляет собой это вращающуюся аэродинамическую поверхность, которая может использоваться и как воздушный винт в режиме самолета, и как несущий винт в режиме вертолета в течение одного и того же полета. Лопасть несущего винта, который используется для зависания и полета в вертикальной плоскости, обычно является более длинной и более гибкой, чем лопасть воздушный винта, который используется для горизонтального полета. Несуще-тянущий винт обычно отличается тем, что показатели длины лопасти и гибкости лопасти находятся между показателями воздушного винта и несущего винта. Во время режима вертолета ТРА наклонен таким образом, что ось вращения несуще-тянущего винта (несуще-тянущих винтов) практически параллельна вертикальной оси CRA (в данном документе - «вертикальная»), чтобы обеспечить CRA подъемной силой. Во время режима самолета ТРА наклоняется таким образом, что ось вращения несуще-тянущего винта практически параллельна продольной оси CRA (далее в данном документе - «горизонтальная»), чтобы тянуть и/или толкать летательный аппарат вперед.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Один аспект варианта осуществления данного изобретения относится к обеспечению CRA с относительно эффективным горизонтальным полетом по прямой, при сохранении преимуществ полета в вертикальной плоскости.
[4] В соответствии с одним вариантом осуществления данного изобретения CRA содержит систему основного несущего винта, который обеспечивает подъемную силу для вертикального взлета и посадки (VTOL) во время режима вертолета, при этом система основного несущего винта содержит по меньшей мере один несущий винт, установленный на валу несущего винта, которые вращает подходящий авиационный двигатель, установленный на фюзеляже CRA, по меньшей мере один ТРА, который содержит несуще-тянущий винт, приводимый в действие REP, который является поворотным для изменения оси вращения несуще-тянущего винта между режимом самолета и режимом вертолета, и крылья для обеспечения подъемной силы во время горизонтального полета. В соответствии с одним вариантом осуществления данного изобретения система основного несущего винта и по меньшей мере один ТРА расположены так, что в режиме вертолета часть направленного вниз потока воздуха от лопастей основного несущего винта проходит по меньшей мере через часть лопастей по меньшей мере одного несуще-тянущего винта. В соответствии с одним вариантом осуществления данного изобретения часть диска, определяемого вращающимися лопастями основного несущего винта («диск основного несущего винта»), нависает по меньшей мере над частью диска, определяемого вращающимися лопастями несуще-тянущего винта («диск несуще-тянущего винта») по меньшей мере одного ТРА. В качестве альтернативы или дополнительно по меньшей мере один основной несущий винт и лопасти несуще-тянущего винта сконфигурированы таким образом, что, в режиме вертолета, отклоненный вниз поток, создаваемый по меньшей мере одним основным несущим винтом, проходит через диск несуще-тянущего винта. Один ТРА или несколько ТРА необязательно сконфигурированы вдоль продольной оси CRA. Необязательно, ТРА установлен с возможностью вращаться вокруг оси на носовой балке или хвостовой балке. Необязательно, CRA содержит два ТРА, которые установлены с возможностью вращаться вокруг оси на носовой балке и хвостовой балке, соответственно. При эксплуатации в режиме вертолета или в промежуточном режиме передний и задний ТРА могут управлять таким образом, чтобы обеспечить им практически равную тягу для того, чтобы поддерживать равновесие CRA вокруг его оси тангажа или, в качестве альтернативы, управлять таким образом, чтобы обеспечить им неодинаковую тягу для того, чтобы изменить ориентацию CRA вокруг оси тангажа. CRA может быть выполнен с возможностью осуществлять обычный (не VTOL) взлет и посадку в режиме самолета
[0005] Необязательно, система основного несущего винта включает в себя схему с перекрещивающимися винтами, которая содержит два взаимоперекрывающих несущих винта, вращающихся в противоположных направлениях, причем каждый вал несущего винта с осью лопастей установлен под углом относительно другого таким образом, чтобы взаимоперекрывающие лопасти не сталкивались друг с другом. В конфигурации с двумя перекрещивающимися винтами вращающиеся в противоположных направлениях несущие винты системы основного несущего винта служат для стабилизации вращения CRA вокруг вертикальной оси. В тех случаях, когда система основного несущего винта содержит один несущий винт, CRA содержит механизм управления рысканием, в качестве примера - каналы в хвостовой части для создания эффекта Коанда.
[6] В одном варианте осуществления данного изобретения основной несущий винт может быть выполнен с возможностью вращаться вокруг оси таким образом, что основной несущий винт может переключаться между: (1) рабочим положением, в котором основной несущий винт функционирует для обеспечения подъемной силы; и (2) сложенным положением, в котором лопасти основного несущего винта расположены вдоль корпуса CRA для уменьшения сопротивления и облегчения горизонтального полета. В одном варианте осуществления данного изобретения расположение втулки несущего винта с вал несущего винта является зафиксированным и неизменно во время перехода между развернутым и сложенным состояниями. Необязательно, во время сложенного состояния боковая поверхность основного несущего винта прикреплена к корпусу CRA. Необязательно, продольная ось вала основного несущего винта в сложенном положении практически параллельна боковой оси CRA. Необязательно, в сложенном положении лопасти основного несущего винта могут быть расположены таким образом, что продольная ось каждой лопасти, если смотреть сверху, практически параллельна продольной оси CRA. Необязательно, в сложенном положении лопасти основного несущего винта могут быть расположены таким образом, что основная поверхность лопастей несущего винта удерживаются вдоль носовой балки. В тех случаях, когда система основного несущего винта представляет собой схему с перекрещивающимися винтами, содержащую два основных несущих винта, которые расположены на противоположных сторонах и, необязательно, равноудалены от продольной оси CRA, основные несущие винты могут поворачиваться в направлении продольной оси CRA, в направлении друг друга. Два основных несущих винта могут взаимно перекрываться, когда они находятся в рабочем положении, чтобы иметь возможность вращаться и создавать подъемную силу, не ударяясь друг об друга в конфигурации схемы с перекрещивающимися винтами. В сложенном положении несущие винты могут не перекрываться, так, чтобы продольная ось каждого лопасти, в качестве примера, была практически параллельна продольной оси CRA.
[0007] В соответствии с одним вариантом осуществления данного изобретения, ТРА (далее в данном документе называемая «ТРА двойного режима» или «DMTPA») может включать в себя два несуще-тянущих винта, расположенный выше по потоку несуще-тянущий винт и расположенный ниже по потоку несуще-тянущий винт. Как расположенный выше по потоку несуще-тянущий винт, так и расположенный ниже по потоку несуще-тянущий винт выполнены с возможностью создавать воздушный поток в одном направлении. Два несуще-тянущих винта сконфигурированы друг относительно друга таким образом, что воздушный поток, который создает расположенный выше по потоку несуще-тянущий винт проходит через расположенный ниже по потоку несуще-тянущий винт, а поток воздуха, создаваемый расположенным ниже по потоку несуще-тянущим винтом, в значительной степени направлен от расположенного выше по потоку несуще-тянущего винта. В соответствии с одним вариантом осуществления данного изобретения расположенный ниже по потоку несуще-тянущий винт выполнен с возможностью большей продуктивности, по сравнению с расположенным выше по потоку несуще-тянущим винтом, с точки зрения функционирования в качестве несущего винта для обеспечения подъемной силы для зависания и/или VTOL, а расположенный выше по потоку несуще-тянущий винт выполнен с возможностью большей продуктивности, по сравнению с расположенным ниже по потоку несуще-тянущим винтом, с точки зрения функционирования в качестве воздушного винта для обеспечения тяги для горизонтального полета. Лопасти расположенного ниже по потоку несуще-тянущего винт DMPTA могут отличаться от лопастей расположенного выше по потоку несуще-тянущего винта наличием одного из свойств или комбинации из двух или нескольких из свойств: более высокая гибкость конструкции, большая длина и более тонкий профиль. Расположенные выше по потоку и ниже по потоку несуще-тянущие винты DMTPA могут быть расположены в соосной конструкции.
[0008] Передний ТРА и, необязательно, носовая балка, которая поддерживает передний ТРА, могут заслонять переднее поле зрения (FOV) пилота CRA. В соответствии с одним вариантом осуществления данного изобретения CRA оснащается множеством камер переднего обзора, которые получают изображения зоны, расположенной перед CRA. Камеры передают изображения на нашлемный дисплей (HMD), который закреплен на голове пилота и/или на видеоэкран в кабине CRA, чтобы предоставить пилоту практически незакрытое переднее FOV, получаемое из воздушного судна.
[0009] В обсуждении, если не указано иное, такие прилагательные как «практически» и «около», которые определяют условия или отношения, характерные для конструктивной особенности или конструктивных особенностей одного варианта осуществления данного изобретения, понимаются как такие, которые означают, что условие или характеристика определяется с точностью до допусков, которые приемлемы для функционирования данного варианта осуществления изобретения в том применении, для которого оно предназначено. Если не указано иное, слово «или» в описании и формуле изобретения считается включающим «или», а не исключающим «или» и указывает по меньшей мере один из, или любую комбинацию предметов, которые оно объединяет.
[0010] В данном кратком описании сущности изобретения в упрощенной форме приведены понятия, которые дополнительно описаны ниже в подробном описании. Это краткое описание не предназначено для определения ключевых конструктивных особенностей или основных характерных особенностей заявляемого объекта изобретения, как и не предназначено для использования с целью ограничения объема заявляемого объекта изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0011] Неограничивающие примеры вариантов осуществления данного изобретения описаны ниже со ссылками на прилагаемые к ним фигуры, которые перечислены в следующем параграфе. Идентичные конструктивные особенности, которые появляются более чем на одной фигуре, обычно помечены одинаковой отметкой на всех фигурах, на которых они появляются. Отметка, маркирующая иллюстрацию, изображающую заданную конструктивную особенность варианта осуществления данного изобретения на фигуре, может использоваться для ссылки на данную конструктивную особенность. Размеры конструктивных особенностей, изображенных на фигурах, выбираются для удобства и ясности представления и не обязательно отображаются в масштабе.
[0012] На Фиг. 1 изображена схема CRA в режиме вертолета в соответствии с одним вариантом осуществления данного изобретения;
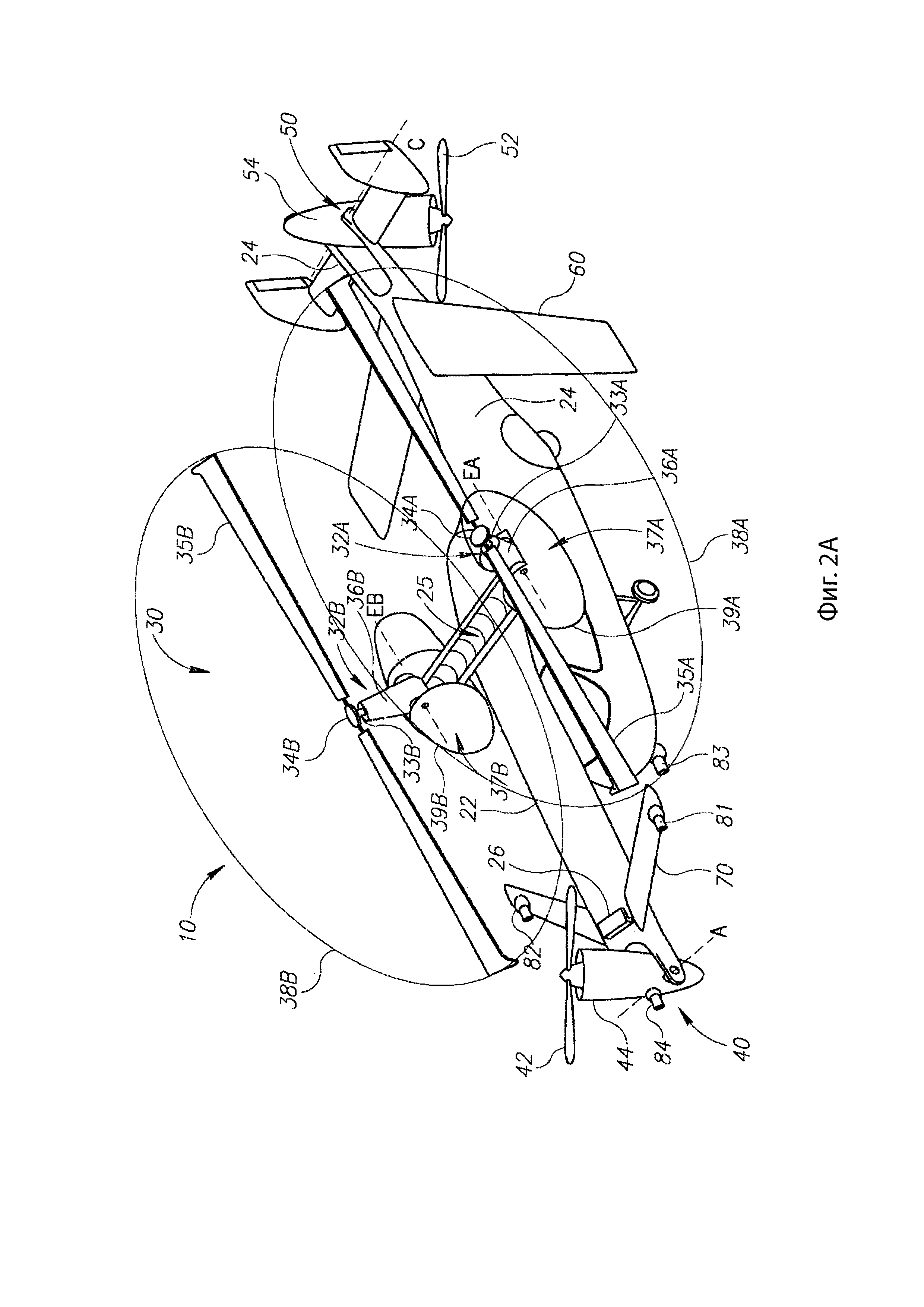
[0013] На Фиг. 2А изображена схема CRA в режиме вертолета в соответствии с одним вариантом осуществления данного изобретения;
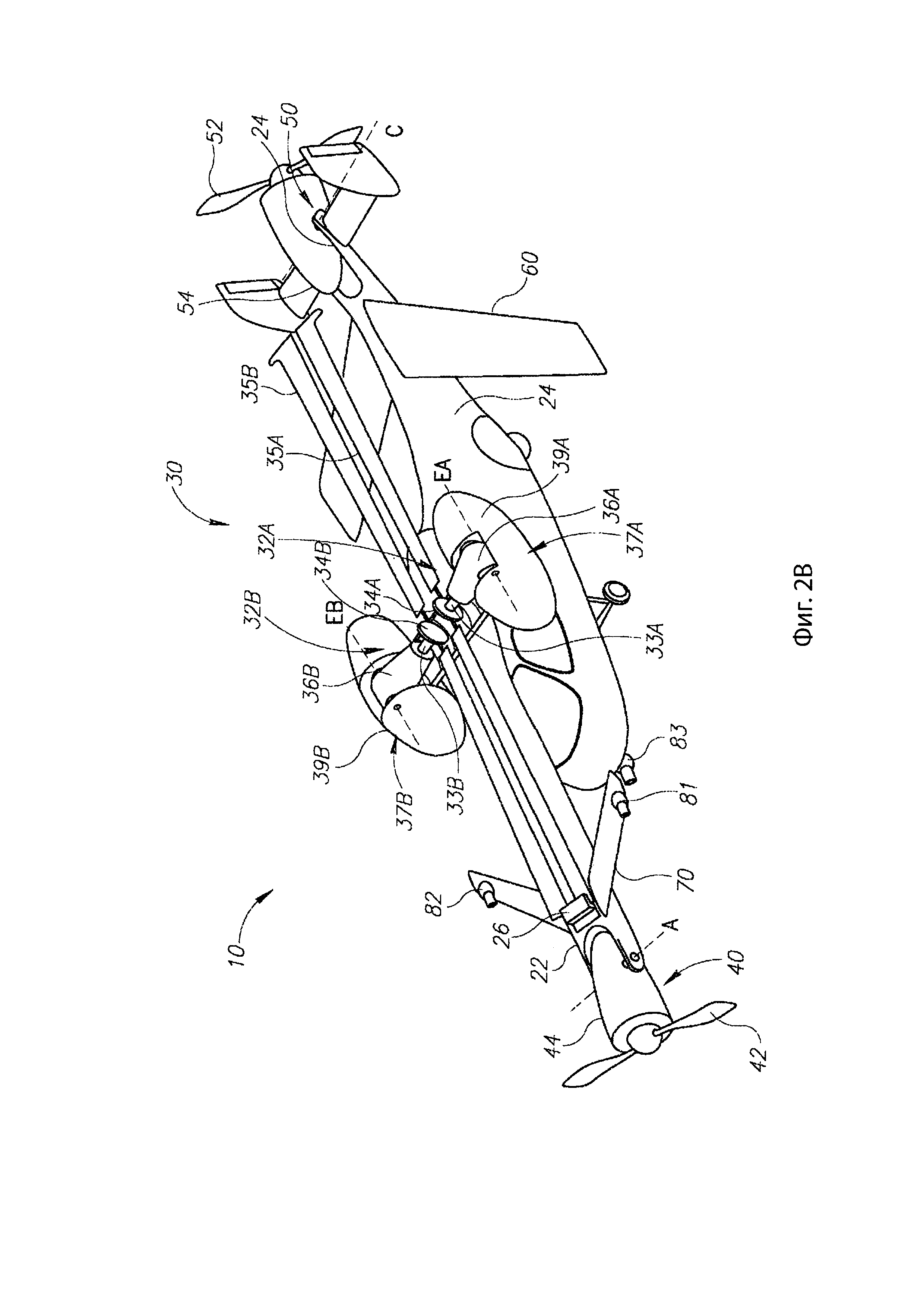
[0014] На Фиг. 2В изображена схема CRA в режиме самолета в соответствии с одним вариантом осуществления данного изобретения;
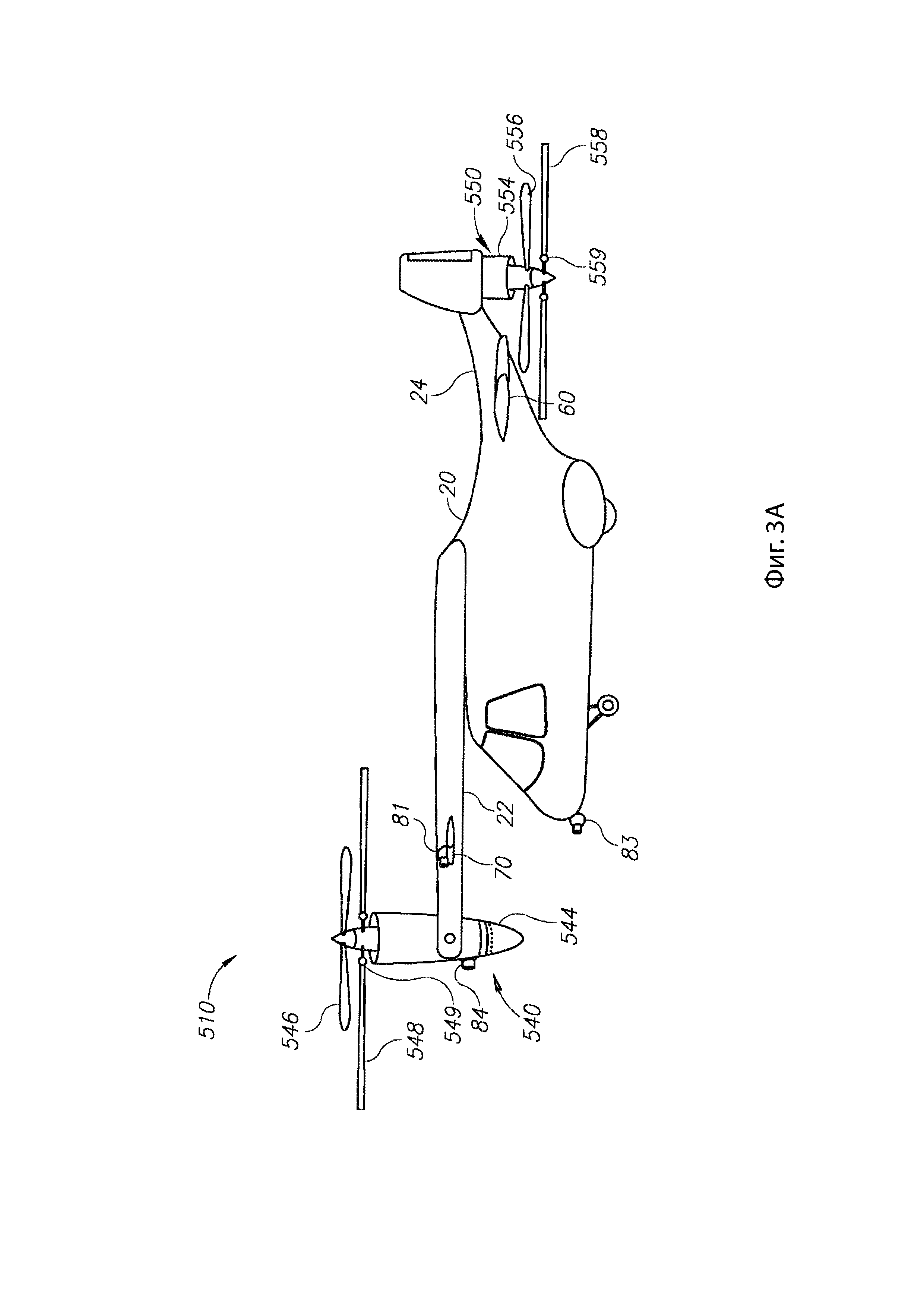
[0015] На Фиг. 3А изображена схема альтернативного CRA, содержащего DMTPA, в режиме вертолета в соответствии с одним вариантом осуществления данного изобретения;
[0016] На Фиг. 3В изображена схема альтернативного CRA, содержащего DMTPA, в режиме самолета в соответствии с одним вариантом осуществления данного изобретения;
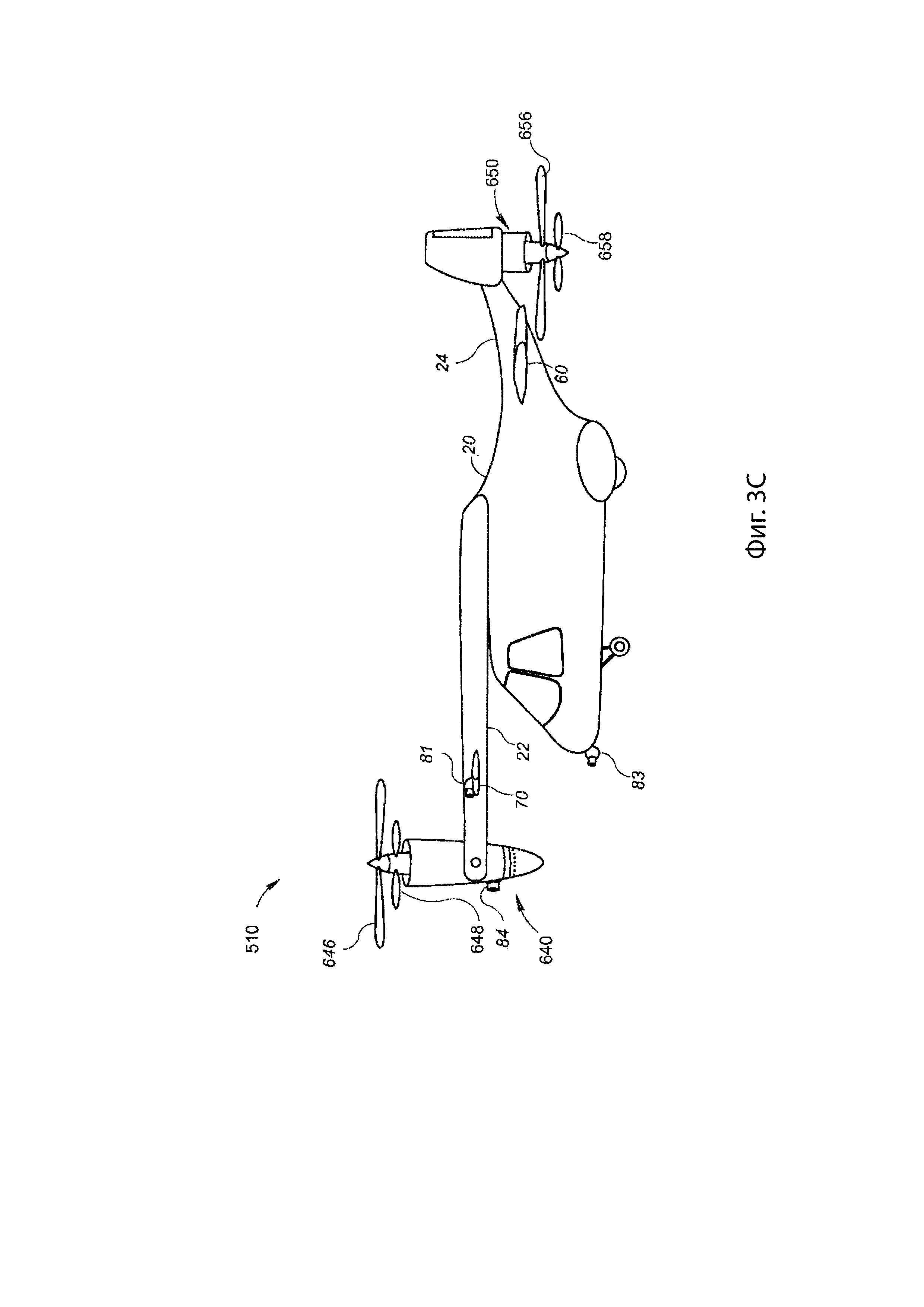
[0017] На Фиг. 3С изображена схема альтернативного CRA, содержащего альтернативный DMTPA, в режиме вертолета в соответствии с одним вариантом осуществления данного изобретения.
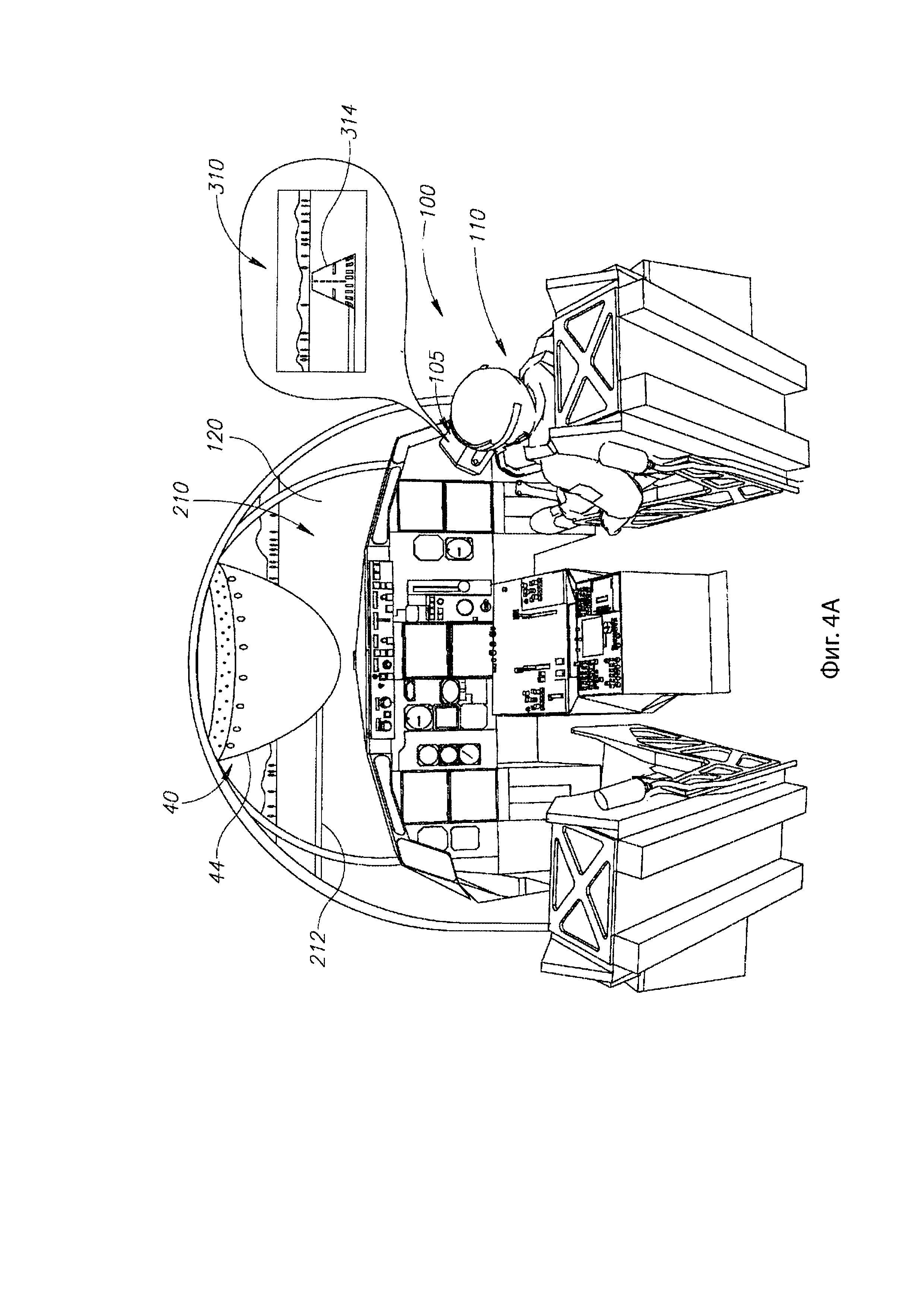
[0018] На Фиг. 4А изображена схема кабины CRA в режиме вертолета с пилотом, на котором надет шлем, который содержит HMD, отображающий поле зрения, захваченное одной или несколькими внешними камерами в соответствии с одним вариантом осуществления данного изобретения; и
[0019] На Фиг. 4В изображена схема кабины CRA в режиме вертолета, причем кабина содержит монитор, отображающий поле зрения, захваченное одной или несколькими внешними камерами в соответствии с одним вариантом осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
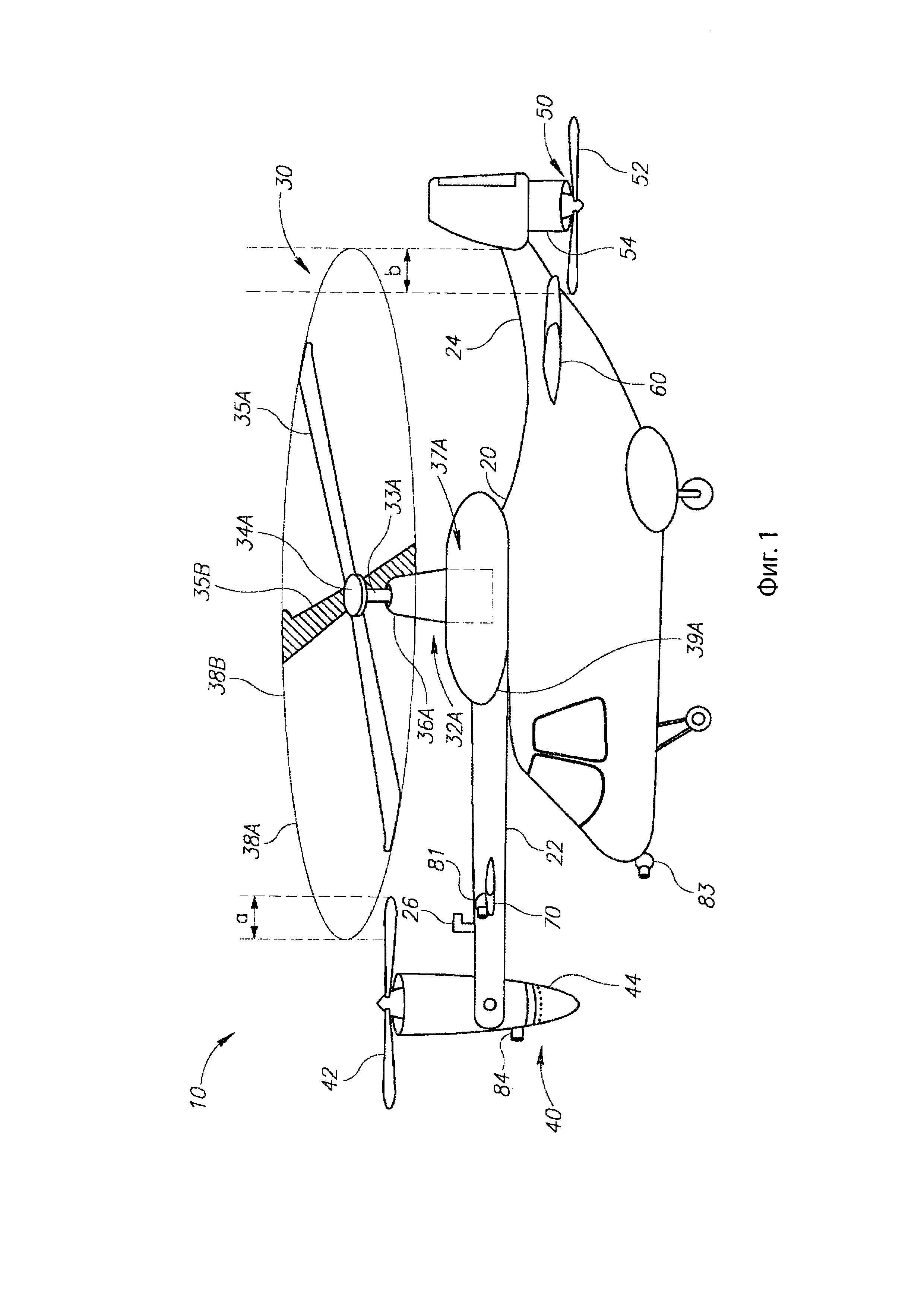
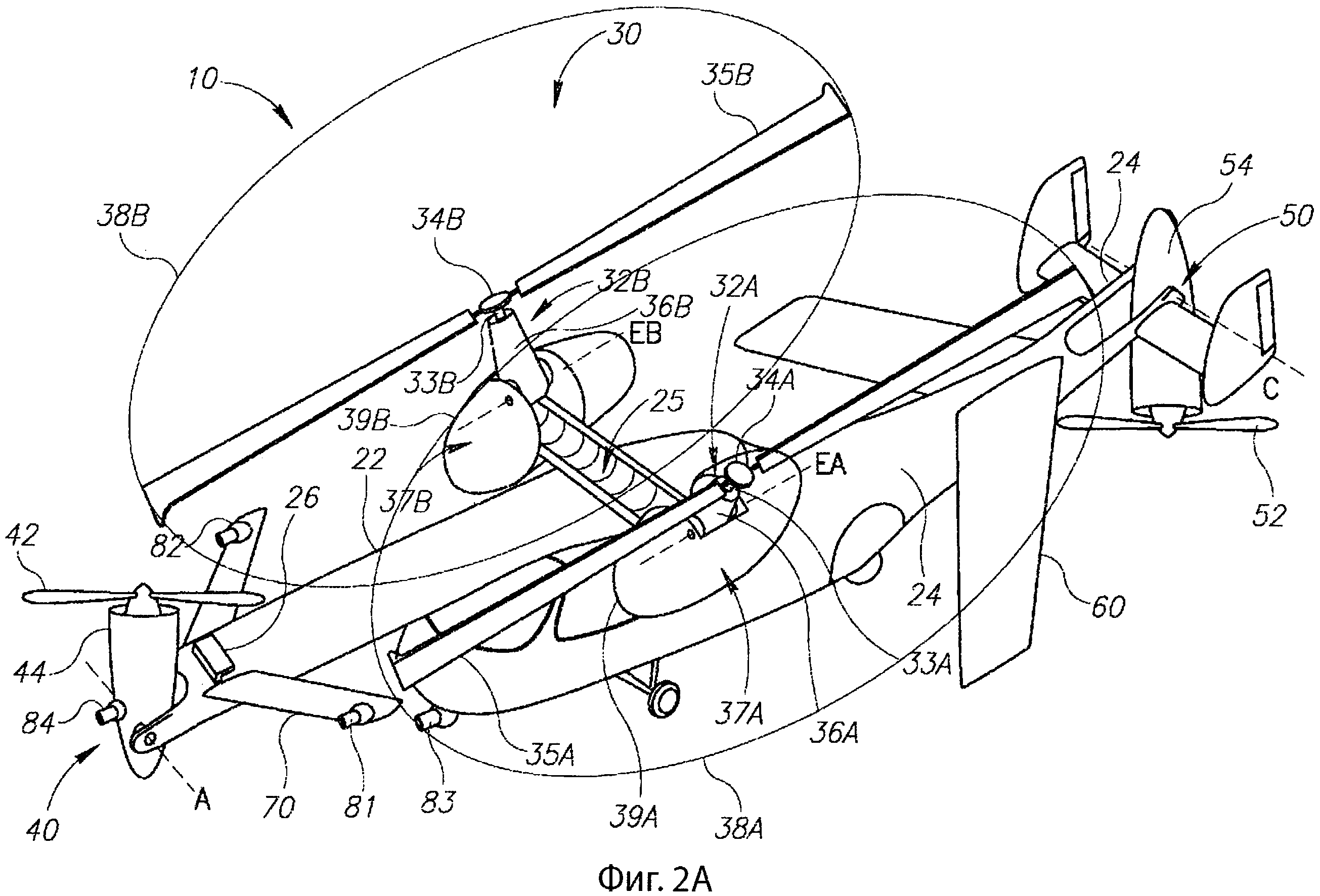
[0020] На Фиг. 1, 2А и 2В схематично изображен CRA 10, содержащий фюзеляж 20, систему 30 основного несущего винта, прикрепленную над фюзеляжем 20 для обеспечения подъемной силы, переднюю ТРА 40, соединенную с фюзеляжем 20 носовой балкой 22, и заднюю ТРА 50, соединенную с фюзеляжем 20 на хвостовой балке 24. Для удобства представления информации любой из элементов: фюзеляж 20, носовая балка 22 и/или хвостовая балка 24, или их комбинация, могут быть названы «корпусом CRA». ТРА 40, 50 и система основного несущего винта 30 скомпонованы вдоль продольной оси CRA. CRA 10 содержит основные крылья 60 и, необязательно, дополнительные крылья 70 для обеспечения подъемной силы во время горизонтального полета в режиме самолета.
[0021] На Фиг. 1 и 2А изображен CRA 10 в режиме вертолета, а на Фиг. 2В изображен CRA в режиме самолета. Каждый ТРА установлен с возможностью вращаться вокруг оси и содержит механизм автоматического управления (не показан) для независимого поворачивания каждого ТРА для перехода между режимом вертолета, в котором ось вращения несуще-тянущих винтов практически вертикальна (Фиг. 1, 2А) для обеспечения подъемной силы, и режимом самолета, в котором ось вращения несуще-тянущих винтов практически горизонтальна (Фиг. 2В) для обеспечения тяги для движения вперед. Передний ТРА 40, который содержит несуще-тянущий винт 42, приводимый в действие REP 44, установлена на носовой балке 22 с возможностью вращаться вокруг оси. Передний ТРА 40 содержит механизм автоматического управления (не показан), который используется для поворота переднего ТРА вокруг оси. Задний ТРА 50, которая содержит несуще-тянущий винт 52, приводимый в действие REP 54, установлена на хвостовой балке 24 с возможностью вращаться вокруг оси. Задний ТРА 50 содержит механизм автоматического управления (не показан), который используется для поворота задней ТРА вокруг оси С.
[0022] В режиме вертолета (Фиг. 1 и 2А) передний ТРА 40 направлен вверх, а задний ТРА 50 направлен вниз. Направление вращения несуще-тянущих винтов 42, 52 организовано таким образом, что они создают практически равномерную тягу в противоположных направлениях, так что передний ТРА 40 функционирует как тянущий несуще-тянущий винт, который создает тягу в направлении, в которое он ориентирован, а задний ТРА 50 функционирует как толкающий несуще-тянущий винт, который создает тягу в направлении, противоположном тому, в которое он ориентирован. В результате, когда в режиме вертолета передний ТРА 40 направлена вверх, а задний ТРА 50 направлена вниз, оба ТРА создают подъемную силу. В режиме самолета (Фиг. 2В) несуще-тянущий винт 42 направлен вперед, а несуще-тянущий винт 52 направлен назад, так что оба ТРА создают тягу для движения вперед. Конструкция и функционирование переднего и заднего ТРА 40, 50, например, угол установки лопастей несуще-тянущего винта, скорость вращения несуще-тянущего винта, могут быть сконфигурированы таким образом, что крутящий момент, действующий на CRA 10 от переднего несуще-тянущего винта 42, практически нейтрализуется крутящим моментом, действующим на CRA от заднего несуще-тянущего винта 52. Конфигурация ТРА 40, 50, как описано выше, с передним несуще-тянущим винтом 42, который является тянущим несуще-тянущим винтом, и задним несуще-тянущим винтом 52, который является толкающим несуще-тянущим винтом, выгодно отличается тем, что оба ТРА 40, 50 могут плавно и согласованно переходить из: (1) режима вертолета, в котором оба ТРА создают подъемную тягу; в (2) промежуточную ориентацию ТРА между вертикальной и горизонтальной плоскостями, в случае чего образуется комбинация подъемной тяги и тяга для движения вперед; в (3) режим самолета, в котором создается тяга для движения вперед, без необходимости инверсии направления вращения несуще-тянущего винта и/или угла установки лопасти во время перехода из одного режима в другой.
[0023] В конфигурации с перекрещивающимися винтами система 30 основного несущего винта содержит спаренные несущие винты 32А и 32В на противоположных сторонах и, необязательно, равноудаленные от продольной оси CRA. Несущий винт 32А включает в себя вал 33А, втулку 34А, лопасти 35А и корпус 36А, а несущий винт 32В включает в себя вал 33В, втулку 34В, лопасти 35В и корпус 36В. Каждый несущий винт может включать в себя тарелку автомата перекоса (не показано) и управляющие тяги (не показано) для управления углом установки лопасти по отношению к валу и втулке несущего винта. В качестве альтернативы, угол установки лопасти несущего винта можно регулировать с помощью сервозакрылка, который представляет собой небольшой аэродинамический профиль, расположенный на задней кромки части лопасти, которым управляет пилот. В качестве альтернативы, несущие винты могут содержать систему независимого управления (IBC) лопастями (не показано), в которой тарелка автомата перекоса и управляющие тяги заменены множеством сервоприводов(не показано), при этом каждый сервопривод соединен с лопастью несущего винта таким образом, что угол установки каждой лопасти можно регулировать независимо от других лопастей. Несущие винты 32А, 32В могут быть установлены на фюзеляже 20, необязательно с помощью пилонов 37А, 37В. Каждый из несущих винтов 32А и 32В может быть установлен с наклоном наружу, в направлении от продольной оси CRA. Как изображено на Фиг. 1, из-за отклонения наружу несущих винтов 32А и 32В верхняя поверхность лопастей 35А левого несущего винта 32А является обозримой (как показано простым рисунком поверхности) в то время как обозримой является нижняя поверхность лопастей 35 В правого несущего винта 32В (как показано заштрихованным рисунком поверхности).
[0024] В соответствии с одним вариантом осуществления данного изобретения несущие винты системы основного несущего винта и несуще-тянущие винты ТРА расположены таким образом, что в режиме вертолета часть направленного вниз потока воздуха, который также может упоминаться как отклоненный вниз поток, от основных несущих винтов проходит по меньшей мере через часть лопастей несуще-тянущих винтов. Такая компоновка может быть достигнута за счет того, что часть диска основного несущего винта нависает над частью диска несуще-тянущего винта ТРА. Диск основного несущего винта для левого несущего винта 32А схематически обозначен окружностью 38А, которая определяется траекторией прохождения концов лопастей 35А во время вращения. Диск основного несущего винта для правого несущего винта 32В схематически обозначен окружностью 38В, которая определяется траекторией прохождения концов лопастей 35В. Расстояние нависания между дисков 38А, 38В несущего винта над передним несуще-тянущим винтом 42 схематически обозначено ссылочным символом «а», а расстояние нависания дисков 38А, 38В несущего винта над задним несуще-тянущим винтом 52 схематически обозначено ссылочным символом «b». Расположение с выступанием несуще-тянущего винта ТРА по отношению к основным несущим винтам может упоминаться как расположение «нависания несущего винта».
[0025] При нормальной функционировании создание отклоненного вниз потока несущими винтами (и несуще-тянущими винтами) связано с созданием подъемной силы, которая является результатом разности давления воздуха над и под лопастями несущего винта, при этом давление воздуха над лопастями ниже, чем давление воздуха под лопастями. Тем не менее, отклоненный вниз поток не является полностью нисходящим потоком воздуха, и некоторые режимы отклоненного вниз потока могут приводить к режиму вихревого кольца (VRS), как будет дополнительно описано далее в данном документе. Из-за центробежного эффекта и сопротивления от статического давления воздуха в области под несущим винтом часть отклоненного вниз потока распространяется в сторону. Следовательно, часть отклоненного вниз потока закручивается над лопастью несущего винта в область над лопастями несущего винта и уменьшает или исключает разность давления воздуха между верхней и нижней сторонами лопастей несущего винта, необходимую для создания подъемной силы. Закручивание отклоненного вниз потока может происходить вокруг законцовки лопасти или, в качестве альтернативы, вокруг внутренней части лопасти вблизи втулки несущего винта, где скорость вращения лопасти относительно медленная. Когда закручивание отклоненного вниз потока вверх, над лопасти, увеличивается по длине лопастей от законцовок лопастей и/или внутренних частей лопасти, способность лопастей создавать подъемную силу снижается, а лопасти попадают в режим срыва потока и не обеспечивают достаточной подъемной силы, чтобы противодействовать тяге тяжести, воздействующей на летательный аппарат. Кроме того, в отличие от функционирования в нормальном режиме, увеличение скорости вращения несущего винта или угла установки лопасти для увеличения отклоненного вниз потока не позволяет восстановить разность давления воздуха и подъемную силу, поскольку весь или большая часть увеличенного отклоненного вниз потока перенаправляется для увеличения давления воздуха над лопастями. С большей вероятностью VRS происходит во время быстрого спуска и/или эксплуатации в узко ограниченном пространстве, или вблизи земли, что является факторами, способствующими закручиванию отклоненного вниз потока над лопастями и/или тому, что отклоненный вниз поток направляется в виде петли из-под лопастей в пространство над лопастями. Вертолетные несущие винты, как правило, выполнен с возможностью уменьшать появление VRS, например, будучи более длинными и более гибкими по сравнению с воздушный винтами для горизонтального полета. При наличии более высокого давления под лопастями, например, когда летательный аппарат спускается, гибкие несущие винты изгибаются вверх, увеличивая горизонтальную центробежную составляющую в отклоненный вниз поток и предотвращая закручивание отклоненного вниз потока над лопастями так, что он поступает в пространство над лопастями. Для сравнения, несуще-тянущие винты, которые, как правило, более жесткие, чем вертолетные несущие винты, более подвержены VRS. В результате того, что отклоненный вниз поток от основных несущих винтов 32А, 32В проходит по меньшей мере через часть несуще-тянущего винта 42, 52, отклоненный вниз поток основного несущего винта может преимущественно уменьшать или ослаблять закручивание вверх отклоненного вниз потока несуще-тянущего винта и, следовательно, уменьшать частоту возникновения VRS. Без привязки к теории, частота возникновения VRS может быть уменьшена в результате каскадного прохождения отклоненного вниз потока от основных несущих винтов через несуще-тянущий винт, и, таким образом, усиливая нисходящий поток отклоненного вниз потока несуще-тянущего винта. В качестве альтернативы или дополнительно, отклоненный вниз поток от основного несущего винта может добавлять горизонтальную составляющую в поток воздуха, который будет направлен по касательной к оси вращения несуще-тянущего винта. Горизонтальная составляющая отклоненного вниз потока основного несущего винта может увеличить радиус закручивания отклоненного вниз потока несуще-тянущего винта, который потребуется для создания VRS в несуще-тянущем винте, что уменьшает частоту возникновения VRS.
[0026] В определенных расположениях основные крылья 60 и/или дополнительные крылья 70 могут служить препятствием для части отклоненного вниз потока, создаваемого передним несуще-тянущим винтом 42 и/или задним несуще-тянущим винтом 52, когда летательный аппарат находится в режиме вертолета, что ослабляет подъемную силу, обеспечиваемую несуще-тянущими винтами. В одном варианте осуществления данного изобретения основные крылья 60 могут быть крыльями с обратной стреловидностью и/или дополнительные крылья 70 могут быть, необязательно, крыльями с положительной стреловидностью. См., например, рисунок 2А. Когда основные крылья 60 сконфигурированы перед задним несуще-тянущим винтом 52, наличие у основных крыльев 60 обратной стреловидности может уменьшить площадь основных крыльев, которая служит препятствием для отклоненного вниз потока, создаваемого задним несуще-тянущим винтом 52. Аналогичным образом, когда дополнительные крылья 70 сконфигурированы за передним несуще-тянущим винтом 42, наличие у дополнительных крыльев положительной стреловидности может уменьшить площадь дополнительного крыла 70, которая служит препятствием для отклоненного вниз потока, создаваемого передним несуще-тянущим винтом 42. В случае, если на заднем несуще-тянущем винте происходит VRS и хвостовая часть или летательный аппарат опускается, увеличивая тем самым угол атаки CRA, способность крыльев с обратной стреловидностью сохранять летные характеристики на высоких углах атаки может помочь восстановить управление CRA. Кроме того, наличие у основных крыльев 60 обратной стреловидности может обеспечить преимущество, заключающееся в том, что пилоту лучше видны законцовки основных крыльев, чтобы визуально отслеживать законцовки для уклонения от столкновения с близко расположенными объектами или с землей, особенно, но не ограничиваясь этим, когда CRA зависает в режиме вертолета.
[0027] В одном варианте осуществления данного изобретения основные крылья 60 с обратной стреловидностью и/или дополнительные крылья 70 с положительной стреловидностью могут быть установлены таким образом, чтобы они по меньшей мере частично перекрывают периметр дисков 38А, 38В несущего винта. Такое пространственное расположение основных крыльев 60 с обратной стреловидностью и/или дополнительных крыльев 70 с положительной стреловидностью по отношению к несущим винтам 32А, 32В может преимущественно уменьшать частоту возникновения VRS, необязательно, путем препятствования закручиванию вверх отклоненного вниз потока, создаваемого несущего винтами 32А, 32В.
[0028] Во время горизонтального полета в режиме вертолета скорость отходящей назад лопасти несущего винта относительно воздуха мала по сравнению со скоростью продвигающейся вперед лопасти несущего винта относительно воздуха. Поэтому отходящие назад лопасти несущего винта имеют тенденцию создавать меньший отклоненный вниз поток и, следовательно, меньшую подъемную силу, чем продвигающиеся вперед лопасти, и с увеличением скорости летательного аппарата увеличивается разность в подъемной силе между отходящими назад и продвигающимися вперед лопастями. В одном варианте осуществления данного изобретения основные крылья 60 и/или дополнительные крылья 70 могут быть таким образом установлены относительно несущих винтов 32А, 32В, что отклоненный вниз поток от несущих винтов сталкивается по меньшей мере с частью основных крыльев и/или дополнительных крыльев. В такой конфигурации, поскольку отклоненный вниз поток может частично уменьшать подъемную силу, создаваемую основными и/или дополнительным крыльями, большая подъемная сила, создаваемая продвигающейся вперед лопастью, может быть сбалансирована с помощью меньшей подъемной силы, создаваемой на соответствующей стороне основных и/или дополнительных крыльев, а меньшая подъемная сила, создаваемая отходящей назад лопастью может быть сбалансированы соответствующей большей подъемной силой, создаваемой на соответствующей стороне основных и/или дополнительных крыльев.
[0029] В одном варианте осуществления данного изобретения основные крылья 60 с обратной стреловидностью и дополнительные крылья 70 с положительной стреловидностью могут быть расположены так, что они полностью или практически перекрываются в пределах внутренней части диска (дисков) несущего винта основного несущего винта (винтов), где отклоненный вниз поток является относительно слабым, и не перекрываются или перекрываются относительно небольшой частью с внешним периметром диска (дисков) несущего винта, где отклоненный вниз поток является относительно сильным. В результате уменьшается степень затенения отклоненного вниз потока за счет перекрытия крыльями, которая препятствует способности основного несущего винта (винтов) создавать подъемную силу.
[0030] На Фиг. 1 и 2А изображено расположение нависания несущего винта в CRA 10. Втулки 34А, 34В несущего винта расположены сверху переднего и заднего несуще-тянущих винтов 42, 52 и ТРА 40, 50 расположены достаточно близко от системы 30 основного несущего винта вдоль продольной оси CRA, так что диски 38А, 38В основного несущего винта нависают по меньшей мере над частью несуще-тянущих винтов 42 и 52. Нависание несущего винта может быть, необязательно, в проекции вида сверху в направлении, параллельном вертикальной оси CRA 10. В качестве альтернативы или дополнительно, когда несущие винты наклонены, как в случае с несущими винтами 32А, 32В, нависание несущего винта может находиться в проекции направления, перпендикулярного плоскости, определяемой диском 38А или 38В несущего винта.
[0031] Как правило, максимальная скорость CRA в режиме самолета существенно выше максимальной скорости CRA в режиме вертолета. Таким образом, сопротивление, создаваемое несущим винтом, в частности - лопастями, а также валом, втулкой и корпусом, может существенно ухудшать летные характеристики CRA в режиме самолета. В качестве альтернативы или дополнительно, невращающиеся и ненадлежащим образом расположенные лопасти несущего винта могут подвергаться разрушающим усилиям сдвига, создаваемым, в режиме самолета, горизонтальным полетом на высокой скорости. Таким образом, выгодно уменьшить аэродинамический профиль несущего винта и его компонентов в то время, когда CRA находится в режиме самолета. В соответствии с одним вариантом осуществления данного изобретения несущие винты системы основного несущего винта установлены с возможностью вращаться вокруг оси таким образом, что несущие винты могут переключаться между рабочим положением, в котором несущий винт функционирует для обеспечения подъемной силы CRA, и сложенным положением, в котором лопасти несущего винта расположены вдоль корпуса CRA, необязательно, фюзеляжа и/или балки, для уменьшения сопротивления и облегчения горизонтального полета.
[0032] Как изображено на Фиг. 2А и 2В, каждый из несущих винтов 32А, 32В установлен с возможностью вращаться вокруг оси на пилонах 37А, 37В и может поворачиваться для того, чтобы переходить из рабочего положения, в котором несущие винты функционируют для вращения лопастей 35А, 35В для обеспечения подъемной силы (Фиг. 2А) в сложенное положение (Фиг. 2В), в котором аэродинамический профиль несущих винтов уменьшается.
[0033] В рабочем положении (Фиг. 2А) валы 33А, 33В практически вертикальны в плоскости, определяемой вертикальной и продольной осями («плоскость тангажа»), или, в качестве альтернативы, наклонены вперед, например, на 5 градусов вперед от вертикали в плоскости тангажа для обеспечения тяги для движения вперед. Несущие винты 32А, 32В отклонены от продольной оси CRA таким образом, что валы 33А, 33 В наклонены наружу, например, на 5 градусов от вертикали в плоскости крена. Отклонение несущих винтов 32А, 32В позволяет лопастям 35А, 35В проходить, не задев втулку и вал противоположного несущего винта.
[0034] В сложенном положении (Фиг. 2В) несущие винты 32А, 32В складываются друг к другу. Необязательно, несущие винты «полностью» складываются до такой степени, что сторона каждого корпуса 36А, 36 В несущего винта находится на одном уровне с поверхностью фюзеляжа 20 и/или пилонами 37А, 37В. В качестве альтернативы или дополнительно, полностью сложенные несущие винты складываются до такой степени, что продольная ось валов 33А, 33В ориентирована практически параллельно боковой оси CRA. Как изображено на Фиг. 2А, 2В, несущие винты 32А, 32В выполнены с возможностью вращаться вокруг осей ЕА и ЕВ соответственно, которые могут быть практически параллельными продольной оси CRA. Несущие винты 32А, 32В расположены с достаточным боковым расстоянием друг от друга, так что несущие винты могут быть полностью сложены без того, чтобы втулки 34А, 34В соприкасались и таким образом препятствовали складыванию. Необязательно, части фюзеляжа 20 и/или пилоны 37А, 37В сконструированы таким образом, чтобы быть заподлицо с полностью сложенными несущего винтами, и могут содержать углубление 25, отформованное таким образом, чтобы частичного размещать в себе несущий винт для улучшения аэродинамического профиля несущих винтов в сложенном положении и/или таким образом, чтобы часть лопасти, которая расположена рядом с ее соединением со втулкой, была размещена ближе к фюзеляжу, или, необязательно, заподлицо с фюзеляжем. Необязательно, пилоны 37А, 37В могут содержать аэродинамический обтекатель 39А, 39В, который охватывает часть корпуса 36А, 36В несущего винта, соответственно, для обеспечения аэродинамически выгодного профиля.
[0035] В одном варианте осуществления данного изобретения, в сложенном положении по меньшей мере часть лопастей 35А, 35В расположена вдоль корпуса CRA, необязательно, фюзеляжа 20, носовой балки 22 и/или, необязательно, хвостовой балки 24. Для сложенного состояния лопасти 35А, 35В могут быть расположены таким образом, чтопродольная ось каждой лопасти практически параллельна продольной оси CRA. Выравнивание продольных осей каждой лопасти несущего винта с продольной осью CRA может быть достигнуто относительно просто, если несущий винт содержит две лопасти, расположенные в линейной конфигурации, как изображено на фигурах. В случае, когда несущий винт содержит более двух лопастей, лопасти могут быть, необязательно, сложены в линейную конфигурацию с помощью веерообразного или ножницеобразного механизма посредством реализации надлежащим образом сконфигурированных механизмов автоматического управления.
[0036] Необязательно, лопасти 35А, 35В несущих винтов 32А, 32В, соответственно, могут вращаться вокруг своей продольной оси, так что по меньшей мере часть основной поверхности лопастей несущего винта расположены практически заподлицо с корпусом CRA 10, необязательно, фюзеляжем 20 и/или носовой балкой 22, а также, необязательно, хвостовой балкой 24. В одном варианте осуществления данного изобретения сервопривод (не показано), соединенный с лопастью 35А или 35В несущего винта на втулке или вблизи соединения со втулкой несущего винта 34А или 34В, соответственно, может использоваться для вращения лопасти на угол установки, подходящий для размещения лопасти на корпус CRA в сложенном положении. Необязательно, сервопривод является частью системы IBC для управления углом установки лопасти во время полета вертолета. Необязательно, угол установки лопасти во время полета вертолета управляется с помощью тарелки автомата перекоса и управляющих тяг, а сервоприводы используются для управления углом установки лопасти во время переключения несущего винта между рабочим положением и сложенным положением. Необязательно, сервопривод может поворачивать угол установки лопасти, в качестве примера, на угол около 90 градусов, когда несущий винт переходит из рабочего положения в сложенное положение. Как правило, лопасти несущего винта вертолета достаточно гибки, чтобы пребывать в изогнутом положении под действием собственного веса, когда они не вращаются. Необязательно, части носовой балки 22, фюзеляжа 20 и/или хвостовой балки 24, сконструированы таким образом, что поверхность на которой располагается лопасть может быть сформована так, чтобы соответствовать контуру основной поверхности лопасти, которая опирается на них. В качестве альтернативы, опорная поверхность носовой балки 22, фюзеляжа 20 и/или хвостовой балки 24 для лопасти может быть практически плоской, при этом лопасти несущего винта соответствуют плоской поверхности, когда несущие винты находятся в сложенном положении.
[0037] Во время быстрого горизонтальный полет, когда CRA находится в режиме самолета, лопасти несущего винта могут подвергаться различным разрушающим силам, вызванных ветром и вибрациями, даже когда несущие винты находятся в сложенном положении, как описано выше. В одном варианте осуществления данного изобретения CRA может содержать держатель лопасти, способный практически жестко зафиксировать лопасть несущего винта в сложенном положении на фюзеляже, носовой балке и/или хвостовой балке во время режима самолета. Как изображено на Фиг. 2В, носовая балка 22 содержит держатель 26 лопасти, который способен закрывать расположенную рядом часть лопастей 35А, 35В. Держатель лопасти 26 необязательно содержит L-образную конструкцию, которая может перемещаться вдоль поверхности носовой балки 22, чтобы перекрыть концевую часть лопасти 35А, 35В несущего винта в сложенном положении. В качестве альтернативы или дополнительно держатель лопасти в соответствии с одним вариантом осуществления данного изобретения может использовать электромагнит (не показано), расположенный под поверхностью носовой балки, предназначенной для улавливания лопасти несущего винта в сложенном положении. Это может быть особенно выгодно для жесткой фиксации лопасти несущего винта на концевой части или около концевой части, направленной в направлении носовой части CRA 10, поскольку направленная вперед лопасть более подвержена разрушающим усилиям сдвига, созданным в результате горизонтального полета по сравнению с направленной назад лопастью несущего винта.
[0038] Понятно, что переход несущих винтов из рабочего в сложенное положение, как описано выше, может быть выполнен при эффективном техническом обслуживании механического устройства компонентов несущего винта, тем самым увеличивая прочность конструкции, поддерживая доступность и прочность компонентов и уменьшая износ и амортизацию, которые могут возникнуть при многократном переходе несущего винта между двумя положениями. Каждый из несущих винтов 32А, 32В может поворачиваться в неизменном виде, без дополнительных изменений в расположение его компонентов. В качестве примера, несущие винты могут поворачиваться без изменения расположения вала 33А, 33В несущего винта относительно втулки 34А, 34В несущего винта, соответственно. Кроме того, в то время как угол установки лопасти необязательно регулируется, как описано выше, чтобы расположить основную поверхность лопасти заподлицо с поверхностью фюзеляжа и/или носовой балки, некоторые аэродинамические преимущества перехода несущих винтов в сложенное положение могут быть обеспечены без регулировки таким образом.
[0039] Поворот несущих винтов для перехода между рабочим и сложенным положением может быть скоординирован с помощью автоматической бортовой системы управления («AFCS», не показано) для достижения выгодных полетных характеристик.
[0040] По мере перехода ТРА 40, 50 из режима вертолета в режим самолета и увеличения скорости горизонтального полета основные и дополнительные крылья 60, 70, соответственно, все в большей степени обеспечивают подъемную силу до тех пор, пока не будет достигнута минимальная воздушная скорость («скорость обеспечения подъемной силы крыла»), при которой крылья обеспечивают достаточную подъемную силу для поддержания высоты без непосредственного вклада подъемной силы от системы 30 основного несущего винта и, необязательно, ТРА 40, 50. AFCS может быть выполнен с возможностью инициировать складывание несущих винтов 32А, 32В из рабочего положения в сложенное положение после достижения CRA 10 скорости обеспечения подъемной силы крыла. Скорость обеспечения подъемной силы крыла может зависеть от нагрузки, переносимой CRA 10, поскольку при большей нагрузке скорость обеспечения подъемной силы крыла увеличивается.
[0041] Как только начинается технологическая операция складывания несущего винта, передача мощности от двигателя несущего винта (не показано), выполненного с возможностью вращать валы 33А, 33В несущего винта, уменьшается и прекращается. В схеме с перекрещивающимися винтами оба несущих винта 32А, 32В обычно приведены в движение двигателем несущего винта (теперь показано), который может быть установлен на фюзеляже 20 или расположен в пределах фюзеляжа, так, что усилие вращения от двигателя передается на оба вала 33А, 33В несущего винта через систему трансмиссии (не показано). Система трансмиссии может быть, необязательно, приспособлена для поддержания заданного смещения вращения между валами 33А, 33В таким образом, что лопасти 35А, 35В могут взаимно перекрываться, не ударяясь друг с другом во время полета в режиме вертолета. Для устранения смещения вращения между лопастями 35А, 35В во время технологической операции складывания трансмиссия может регулироваться таким образом, что продольные оси лопастей несущего винта могут быть ориентированы практически параллельно продольной оси CRA 10 (как изображено на Фиг. 2А). Необязательно, валы 33А, 33В могут быть отсоединены от трансмиссии, а отдельные ротационные механизмы автоматического управления (не показано), которые содержатся в каждом из несущих винтов 32А, 32В, может ориентировать лопасти вдоль продольной оси CRA. После того, как лопасти выровнены с продольной осью CRA, соответствующие складывающие механизмы автоматического управления могут поворачивать несущие винты 32А, 32В вокруг осей ЕА, ЕВ, соответственно, таким образом, что несущие винты переходят в сложенное положение. Необязательно, до поворота несущих винтов 32А, 32В или во время их поворота, угол установки лопастей 35А, 35В регулируется таким образом, что основная поверхность лопастей ориентирована так, чтобы опираться на фюзеляж 20, носовую балку 22 и, необязательно, хвостовую балку 24. Понятно, что, если несущие винты 32А, 32В поворачиваются одновременно и скоординированным образом, центр массы CRA 10 вдоль его поперечной и продольной осей практически не изменится, таким образом, выгодно поддерживая стабильность полета во время технологической операции складывания несущего винта.
[0042] Несмотря на то, что складывающиеся основные несущие винты 32А, 32В, как описано выше, и как изображено на Фиг. 1 и 2А - 2В, установлены на CRA 10 с ТРА 40, 50, складывающиеся основные несущие винты могут быть установлены и на летательных аппаратах других конфигураций. Необязательно, складывающиеся основные несущие винты могут быть установлены на летательных аппаратах с системами обычных воздушных винтов или реактивных двигателей, для обеспечения тяги для горизонтального полета, а основные несущие винты 32А, 3В в рабочем положении могут быть достаточными для обеспечения зависания и способности VTOL летательного аппарата без дополнительной подъемной силы, создаваемых ТРА.
[0043] Рассмотрим теперь Фиг. 3А - 3В. В соответствии с одним вариантом осуществления данного изобретения CRA может содержать по меньшей мере один DMTPA, содержащий расположенный выше по потоку несуще-тянущий винт и расположенный ниже по потоку несуще-тянущий винт в конфигурации с общей осью. Расположенный ниже по потоку несуще-тянущий винт может быть выполнен с возможностью большей продуктивности, по сравнению с расположенным выше по потоку несуще-тянущим винтом, с точки зрения функционирования в качестве несущего винта для обеспечения подъемной силы для зависания и/или VTOL, а расположенный выше по потоку несуще-тянущий винт может быть выполнен с возможностью большей продуктивности, по сравнению с расположенным ниже по потоку несуще-тянущим винтом, с точки зрения функционирования в качестве воздушного винта для обеспечения тяги для горизонтального полета. Лопасти расположенного ниже по потоку несуще-тянущего винта отличаются от лопастей расположенного выше по потоку несуще-тянущего винта одной, или комбинацией из двух или большего числа характеристик, выбранных из: большая длина, более высокая гибкость конструкции и более тонкий профиль.
[0044] В соответствии с одним вариантом осуществления данного изобретения, вращением расположенного ниже по потоку и расположенного выше по потоку несуще-тянущих винтов можно управлять независимо, так что два соосных несуще-тянущих винта могут вращаться с разной скоростью, или один несуще-тянущий винт может вращаться, в то время как другой несуще-тянущий винт не вращается. Необязательно, два несуще-тянущих винта могут вращаться с равными характеристиками вращения или вращаться в противоположную сторону.
[0045] AFCS может быть способна управлять вращением каждого из соосных несуще-тянущих винтов для преимущественного перехода между режимом вертолета и режимом самолета. Необязательно, когда DMTPA поворачивается в вертикальную ориентацию для режима вертолета, как расположенные выше по потоку несуще-тянущие винты, так и расположенные ниже по потоку несуще-тянущие винты вращаются с созданием подъемной силы. В качестве альтернативы, только расположенный ниже по потоку несуще-тянущий винт, который предпочтительно сконфигурирован для полета в режиме вертолета, выполнен с возможностью вращаться во время режима вертолета, в то время как расположенный выше по потоку несуще-тянущий винт, который предпочтительно сконфигурирован для горизонтального полета, остается неиспользованным. Необязательно, когда DMTPA поворачивается в горизонтальную ориентацию для режима самолета, как расположенные выше по потоку несуще-тянущие винты, так и расположенные ниже по потоку несуще-тянущие винты вращаются с созданием тяги для движения вперед. Альтернативно, только расположенный выше по потоку несуще-тянущий винт вращается в режиме самолета, в то время как расположенный ниже по потоку несуще-тянущий винт не используется. Во время перехода от одного режима полета к другому один несуще-тянущий винт может постепенно увеличивать свою скорость вращения, а другой несуще-тянущий винт снижает свою скорость вращения. В качестве примера, в то время как DMTPA поворачивается для перехода из режима вертолета в режиму самолета расположенный ниже по потоку несуще-тянущий винт, который обеспечивает подъемную силу во время режима вертолета, может постепенно замедляться, а затем, необязательно, останавливать вращение. Одновременно расположенный выше по потоку несуще-тянущий винт может начать вращаться и/или постепенно увеличивать скорость вращения.
[0046] Во время режима вертолета расположенный выше по потоку несуще-тянущий винт, который выполнен с возможностью быть более выгодным, чем расположенный ниже по потоку несуще-тянущий винт, чтобы функционировать в качестве воздушный винта, является более подвержен VRS по сравнению с расположенным ниже по потоку несуще-тянущим винтом. В одном варианте осуществления данного изобретения, в режиме вертолета AFCS может вращать только расположенный ниже по потоку несуще-тянущий винт, который менее подвержен VRS, чем расположенный выше по потоку несуще-тянущий винт. В качестве альтернативы или дополнительно, AFCS может уменьшить угол атаки лопастей расположенного выше по потоку несуще-тянущего винта, в качестве примера - до нуля градусов относительно диска несуще-тянущего винта, так что расположенный ниже по потоку несуще-тянущий винт в основном используется для создания подъемной силы или исключительно используется для используется для создания подъемной силы.
[0047] В режиме самолета лопасти расположенного ниже по потоку несуще-тянущего винта могут увеличить сопротивление и снизить эффективность горизонтального полета. В соответствии с одним вариантом осуществления данного изобретения лопасти неиспользуемого расположенного ниже по потоку несуще-тянущего винта могут быть сложены в направлении вниз по потоку, переходя из рабочего положения в сложенное положение, чтобы выгодно обеспечить уменьшенный аэродинамический профиль расположенного ниже по потоку несуще-тянущего винта во время горизонтального полета. Необязательно, DMTPA при необходимости содержит механизмы автоматического управления и контроллеры, которые, необязательно, скоординированы AFCS, как описано в данном документе, для перехода расположенного ниже по потоку несуще-тянущего винта между сложенным положением и рабочим положением.
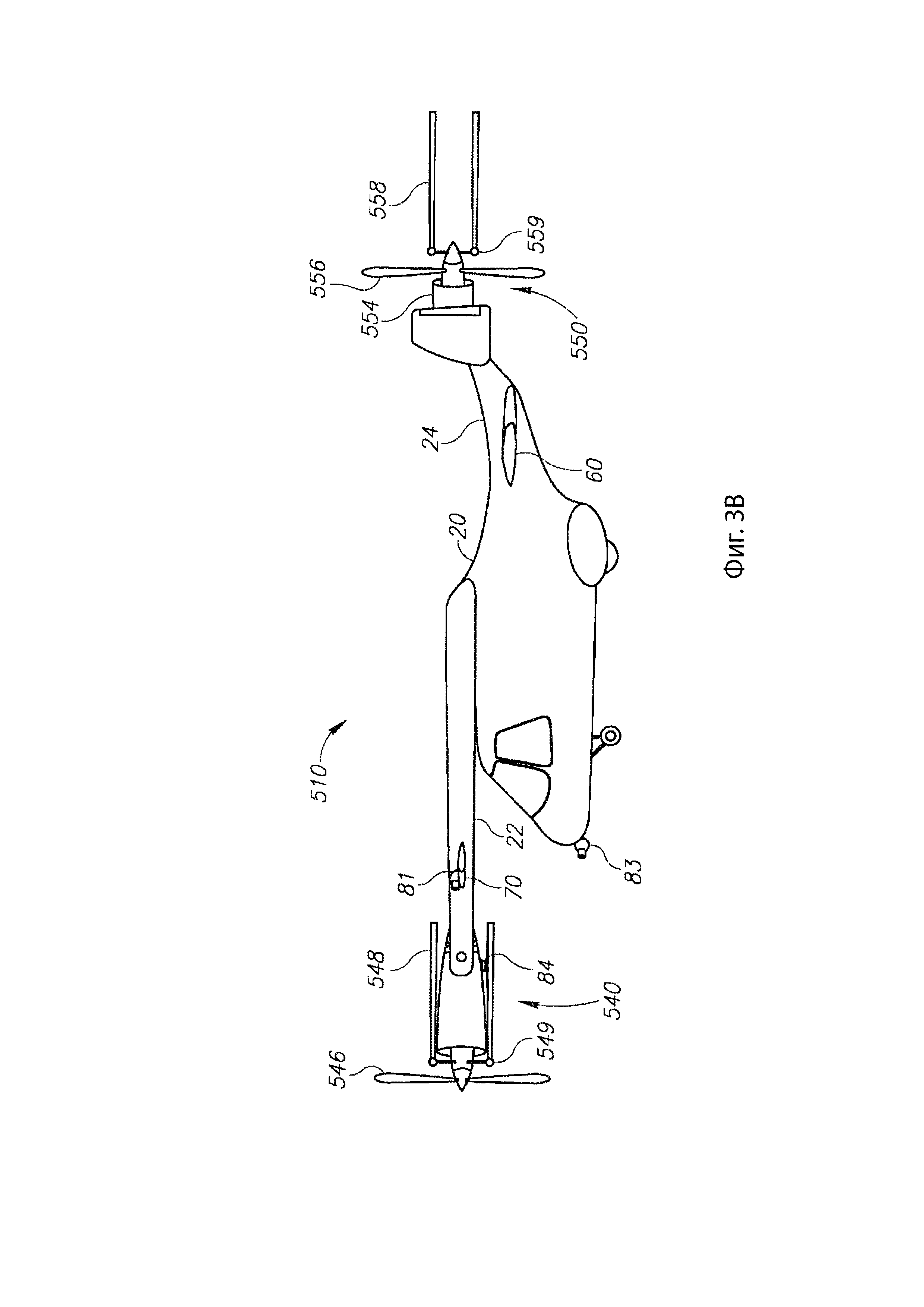
[0048] На Фиг. 3А - 3В схематично изображен альтернативный CRA 510, который практически такой же, как CRA 10, схематически изображенный на Фиг. 1 и 2А - 2В, за исключением того, что CRA 510 не содержит систему основного несущего винта 30, а содержит две DMTPA - переднюю DMTPA 540, которая содержит расположенный выше по потоку несуще-тянущий винт 546 и расположенный ниже по потоку несуще-тянущий винт 548, и заднюю DMTPA 550, которая содержит расположенный выше по потоку несуще-тянущий винт 556 и расположенный ниже по потоку несуще-тянущий винт 558. На Фиг. 3А изображен CRA 510, который находится в режиме вертолета с DMTPA 540, 550 в вертикальной ориентации, а на Фиг. 3В изображен CRA 510 в режиме самолета с DMTPA 540, 550 в горизонтальной ориентации. Кроме того, расположенные ниже по потоку несуще-тянущие винты 548, 558 находятся в рабочем положении, как изображено на Фиг. 3А, и в сложенном положении, как изображено на Фиг. 3В. В одном варианте осуществления данного изобретения расположенные ниже по потоку несуще-тянущие винты 548, 558 складываются на шарнирах 549, 559, соответственно. Шарниры 549, 559 содержат ротационные механизмы автоматического управления (не показаны) и/или запирающие механизмы (не показаны), которые складывают расположенные ниже по потоку несуще-тянущие винты в сложенное положение, когда они не используются во время режима полета, и раскладывают расположенные ниже по потоку несуще-тянущие винты в рабочее положение при переходе в режим вертолета. Необязательно, при переходе из рабочего положения в сложенное положение несуще-тянущие винты используют воздушный поток, создаваемый горизонтальным полетом, для обеспечения мощности для складывания лопастей. Необязательно, несуще-тянущие винты могут вращаться для обеспечения центробежной силы для открытия лопастей при переходе из сложенного положения в рабочее положение. Необязательно, шарниры 549, 559 дополнительно содержат сервоприводы IBC (не показаны) для управления углом установки лопасти в режиме полета вертолета.
[0049] На Фиг. 3С изображен CRA 510, который содержит альтернативные DMTPA 640 и 650 в режиме вертолета. DMTPA 640 содержит основной несуще-тянущий винт 646 и вспомогательный несуще-тянущий винт 648 с более короткой лопастью по сравнению с основным несуще-тянущим винтом. Аналогично, DMTPA 650 содержит основной несуще-тянущий винт 656 и вспомогательный несуще-тянущий винт 658 с более короткой лопастью по сравнению с основным несуще-тянущим винтом. Необязательно, лопасти вспомогательного несуще-тянущего винта 658 представляют собой менее чем 50%, менее чем 40%, менее чем 30%, менее чем 25%, или менее чем 20% от длины лопастей основного несуще-тянущего винта 656. Как объяснено выше, VRS может возникать, когда отклоненный вниз поток, создаваемый несуще-тянущим винтом, закручивается вверх и создает восходящий поток воздуха через внутреннюю часть лопасти вблизи втулки несущего винта, где скорость вращения лопасти является медленной относительно внешней части лопасти. В одном варианте осуществления данного изобретения вспомогательный несуще-тянущий винт 658 служит для создания дополнительного отклоненного вниз потока, который служит для уменьшения или предотвращения восходящего потока воздуха через внутренние части лопастей основного несуще-тянущего винта вблизи втулки, что уменьшает или предотвращает возникновение VRS в основном несуще-тянущем винте. В одном варианте осуществления данного изобретения вспомогательный несуще-тянущий винт может быть способен вращаться с большей скоростью вращения, чем основной несуще-тянущий винт, необязательно, около от 2 до 3 раз превышающей скорость вращения основного несуще-тянущего винта. Несмотря на то, что вспомогательные несуще-тянущие винты 648, 658 изображены на Фиг. 3С расположенными ниже по потоку от основных несуще-тянущих винтов 646, 656 соответственно, вспомогательные несуще-тянущие винты могут быть, необязательно, расположены выше по потоку от основного несуще-тянущего винта.
[0050] Несмотря на то, что DMTPA, как описано выше, и как изображено на Фиг. 3А - 3С, установлены на CRA 510, в котором отсутствуют основные несущие винты 32А и 32В, и расположены вдоль продольной оси CRA, DMTPA могут быть установлены и на CRA с другими конфигурациями. Необязательно, DMTPA могут быть установлены на CRA с системой основного несущего винта (например, системой 30 основного несущего винта, как показано в описанном со ссылкой на Фиг. 1, 2А и 2В). Дополнительно или в качестве альтернативы, DMTPA могут быть расположены вдоль боковой оси CRA, а не вдоль продольной оси.
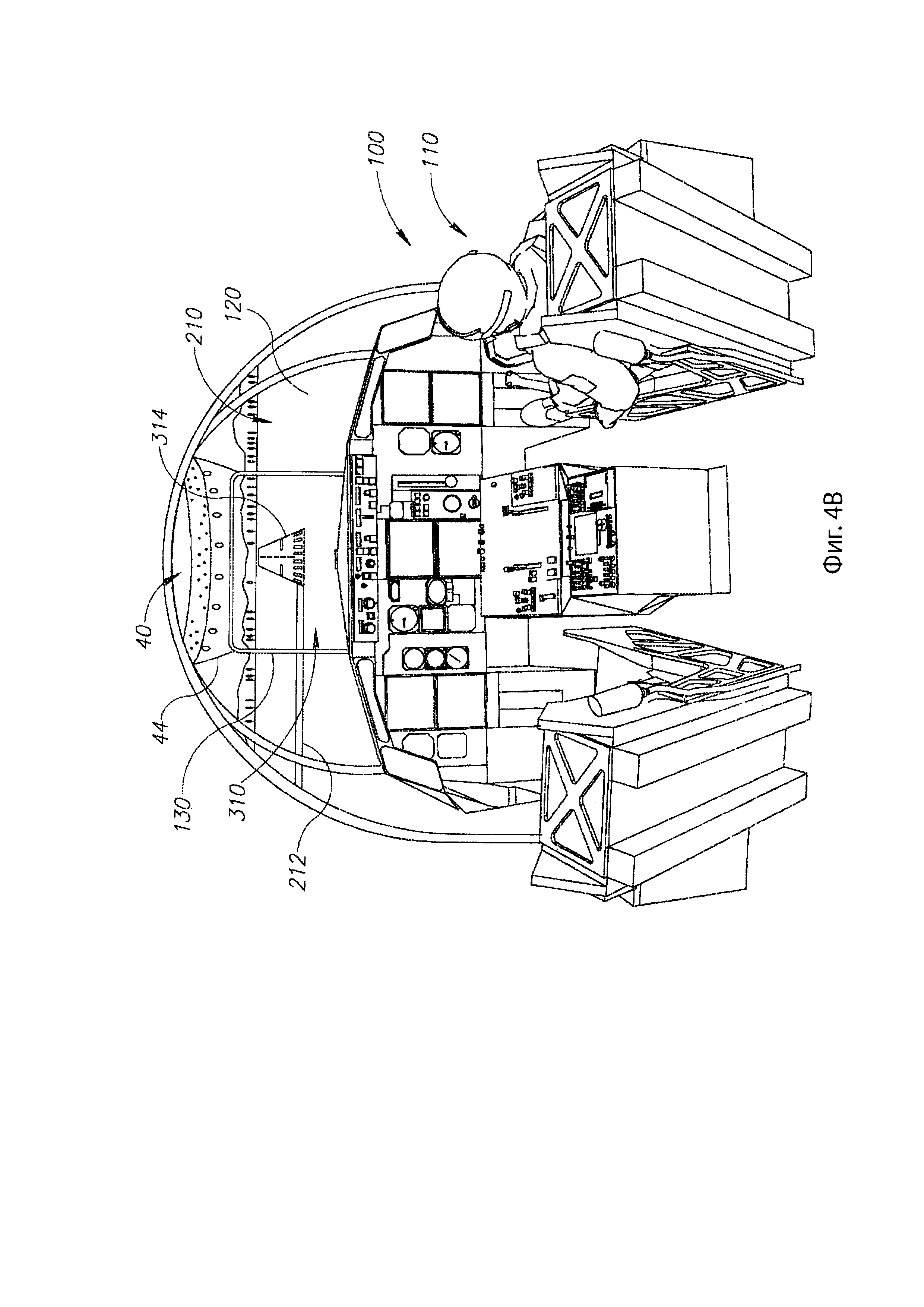
[0051] Рассмотрим теперь Фиг. 4А и 4В. Из-за прямолинейной конфигурации ТРА передняя ТРА и, необязательно, носовая балка, которая поддерживает переднюю ТРА, может перекрывать поле зрения (FOV) с передней стороны кабины CRA. На Фиг. 4А и 4В изображена кабина 100 CRA 10, который летит в режиме вертолета. Когда ТРА 40 ориентирована вверх для режима вертолета, REP 44 перекрывает FOV 210, которое обеспечивается пилоту 110 через окно 120 кабины пилота. В качестве примера, в то время как часть дороги 212 видна пилоту, часть FOV 210 непосредственно перед CRA 10 перекрыта REP 44.
[0052] В соответствии с одним вариантом осуществления данного изобретения CRA 10 снабжен одной или несколькими камерами переднего обзора, в качестве примера - камерами 81-84 (изображены на Фиг. 1, 2А - 2В, 3А - 3С), которые получают изображения зоны, расположенной перед CRA. Одна или несколько камер могут быть установлены на крыле (в качестве примера - камеры 81 и 82 установлены на вспомогательных крыльях 70) и/или фюзеляже (в качестве примера - камеры 83 установлены на передней части фюзеляжа 20). В соответствии с одним вариантом осуществления данного изобретения камера 84 установлена на передней REP 44 таким образом, что камера 84 обращена вперед, когда REP 44 находится в режиме вертолета, и обращена вниз, когда REP 44 находится в режиме самолета (как показано на рисунке 2В). Камеры обеспечивают изображения на HMD 105, который надет на пилота 110 (Фиг. 4А), или на видеоэкран 130 в кабине 100 (Фиг. 4В), чтобы предоставить пилоту неперекрытый передний FOV 310 со стороны летательного аппарата. В качестве примера, взлетно-посадочная полоса 314, которая полностью перекрыта REP 44 в FOV 210 из окна 120 кабины, видна в FOV 310, если смотреть через HMD 105 (Фиг. 4А) или видеоэкран 130 (Фиг. 4В). Необязательно, видеоэкран 130 помещен с возможностью извлечения поверх части окна 120, перекрывая часть FOV 210, которая загорожена REP 44.
[0053] В описании и формуле изобретения настоящей заявки каждый из глаголов «содержать» «включать» и «иметь» и их спряжения используются для обозначения того, что объект или объекты глагола не обязательно являются полным списком компонентов, элементов или частей субъекта или субъектов глагола.
[0054] Описания вариантов осуществления данного изобретения в настоящей заявке представлены в качестве примера и не предназначены для ограничения объема данного изобретения. Описанные варианты осуществления включают различные конструктивные особенности, не все из которых требуются во всех вариантах осуществления данного изобретения. В некоторых вариантах осуществления изобретения используются только некоторые из конструктивных особенностей или возможные комбинации конструктивных особенностей. Варианты осуществления данного изобретения, которые описаны, и варианты осуществления данного изобретения, которые содержат различные комбинации конструктивных особенностей, отмеченных в описанных вариантах осуществления изобретения, будут приходить на ум специалистам в данной области техники. Объем данного изобретения ограничивается только формулой изобретения.