Результат интеллектуальной деятельности: СИСТЕМА НАВЕДЕНИЯ ГОРНОГО КОМБАЙНА
Вид РИД
Изобретение
ССЫЛКИ НА СОПУТСТВУЮЩИЕ ЗАЯВКИ
[0001] Настоящая заявка является заявкой в частичное продолжение ране поданной совместно рассматриваемой заявки на патент США № 1401693, поданной 30 августа 2013 года, которая является продолжением заявки на патент США № 13236961, поданной 20 сентября 2011, в которой испрашивается приоритет по предварительной заявке на патент США 61403817, поданной 22 сентября 2010 года и все содержание всех этих заявок включено в настоящее описание путем отсылки.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к горнодобывающему оборудованию и, в частности, к подземному горному комбайну.
[0003] Горные комбайны с дистанционным управлением обычно управляются расположенным на удалении человеком-оператором с помощью устройства дистанционного управления. Оператор находится сзади от комбайна и управляет работой машины на глаз. Оператор должен обеспечивать постоянное выравнивание горного комбайна по пласту минерала или рудного тела, поскольку трудно выпрямить ориентацию машины после того, как она отклонилась. Во многих случаях рудное тело изменяется в трехмерном пространстве, что затрудняет следование комбайна по пласту.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0004] В одном варианте настоящего изобретения предлагается система наведения для разработки пласта материала, при этом пласт материала определяет плоскость пласта, и система наведения содержит горный комбайн, каретку и направляющий узел. Горный комбайн содержит врубовую головку и определяет ось крена, проходящую вдоль длины комбайна, ось тангажа, проходящую от одной стороны комбайна к другой стороне, и ось рыскания, проходящую от верхней стороны комбайна к нижней стороне. Каретка содержит первый излучатель, второй излучатель и третий излучатель. Первый излучатель проецирует первый лазерный луч, выровненный по плоскости пласта, второй излучатель проецирует второй лазерный луч, а третий излучатель проецирует третий лазерный луч. Направляющий узел содержит первый индикатор и мишень. Первый индикатор выровнен со вторым лазерным лучом, а мишень выровнена с третьим лазерным лучом. Относительные положения первого индикатора относительно второго лазерного луча и мишени относительно третьего лазерного луча указывают на ориентацию продольной оси, поперечной оси и вертикальной оси относительно плоскости пласта.
[0005] В другом варианте изобретения предлагается каретка для лазерного излучателя для наведения комбайна во время разработки пласта минерала. Пласт минерала определяет плоскость пласта. Узел лазерного излучателя содержит основание, первый излучатель и второй излучатель. Первый лазерный излучатель соединен с основанием и излучает первый плоский лазерный луч, выровненный с плоскостью пласта. Второй лазерный излучатель соединен с основанием и излучает второй лазерный луч, для выравнивания комбайна.
[0006] В еще одном варианте изобретения предлагается способ наведения горного комбайна во время разработки пласта минерала. Горный комбайн, имеет первый конец, содержащий врубовую головку, и второй конец, а пласт минерала определяет плоскость пласта, при этом способ содержит этапы, на которых: создают первый лазерный луч, второй лазерный луч и третий лазерный луч; устанавливают первый индикатор, расположенный на втором конце комбайна, и мишень, расположенную рядом с комбайном; выравнивают первый лазерный луч с плоскостью пласта, выравнивают второй лазерный луч с первым индикатором; выравнивают третий лазерный луч с мишенью; и управляют комбайном для добычи материала в пласте так, чтобы первый индикатор оставался выровненным со вторым лазерным лучом, а мишень оставалась выровненной с третьим лазерным лучом.
[0007] В еще одном варианте настоящего изобретения горный комбайн содержит шасси, врубовую головку, приводной механизм, соединенный с шасси и поддерживающий шасси для движения по полу выработки, первый излучатель света и второй излучатель света. Шасси имеет первый конец и второй конец, и проходящую между ними ось крена, и, кроме того, имеет нижнюю сторону и верхнюю сторону и проходящую между ними ось рыскания. Врубовая головка соединена с первым концом шасси. Первый излучатель света соединен с шасси рядом с первым концом шасси и проецирует свет от шасси в направлении параллельном оси рыскания. Второй излучатель света соединен с шасси рядом со вторым концом и проецирует свет от шасси в направлении, параллельном оси рыскания.
[0008] В еще одном варианте горный комбайн содержит шасси, врубовую головку, приводной механизм, соединенный с шасси и поддерживающий шасси для движения по полу выработки, и излучатель света, соединенный с шасси. Шасси содержит первый конец и второй конец с проходящей между ними продольной осью, и далее содержит нижнюю сторону и верхнюю сторону с проходящей между ними осью рыскания. Врубовая головка соединена с первым концом шасси. Излучатель света соединен с шасси и излучает веерный лазерный луч от шасси в направлении, параллельном оси рыскания. Веерный лазерный луч проецирует линию на поверхность выработки, которая удерживается параллельной заранее определенному направлению, когда приводной механизм подает шасси вперед.
[0009] В еще одном варианте способ эксплуатации горного комбайна, имеющего шасси и врубовую головку, соединенную с шасси, содержит этапы, на которых: создают визирную линию на своде выработки, при этом визирная линия проходит параллельно заранее определенному направлению продвижения; излучают первый веерный лазерный луч в сторону свода выработки, при этом веерный лазерный луч проецирует первую линию на своде выработки; излучают второй веерный лазерный луч в сторону свода выработки, при этом веерный лазерный луч проецирует вторую линию на своде выработки; и перемещают горный комбайн в направлении подачи так, чтобы первая линия и вторая линия оставались параллельными визирной линии.
[0010] Другие аспекты изобретения будут очевидны из нижеследующего подробного описания и приложенных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
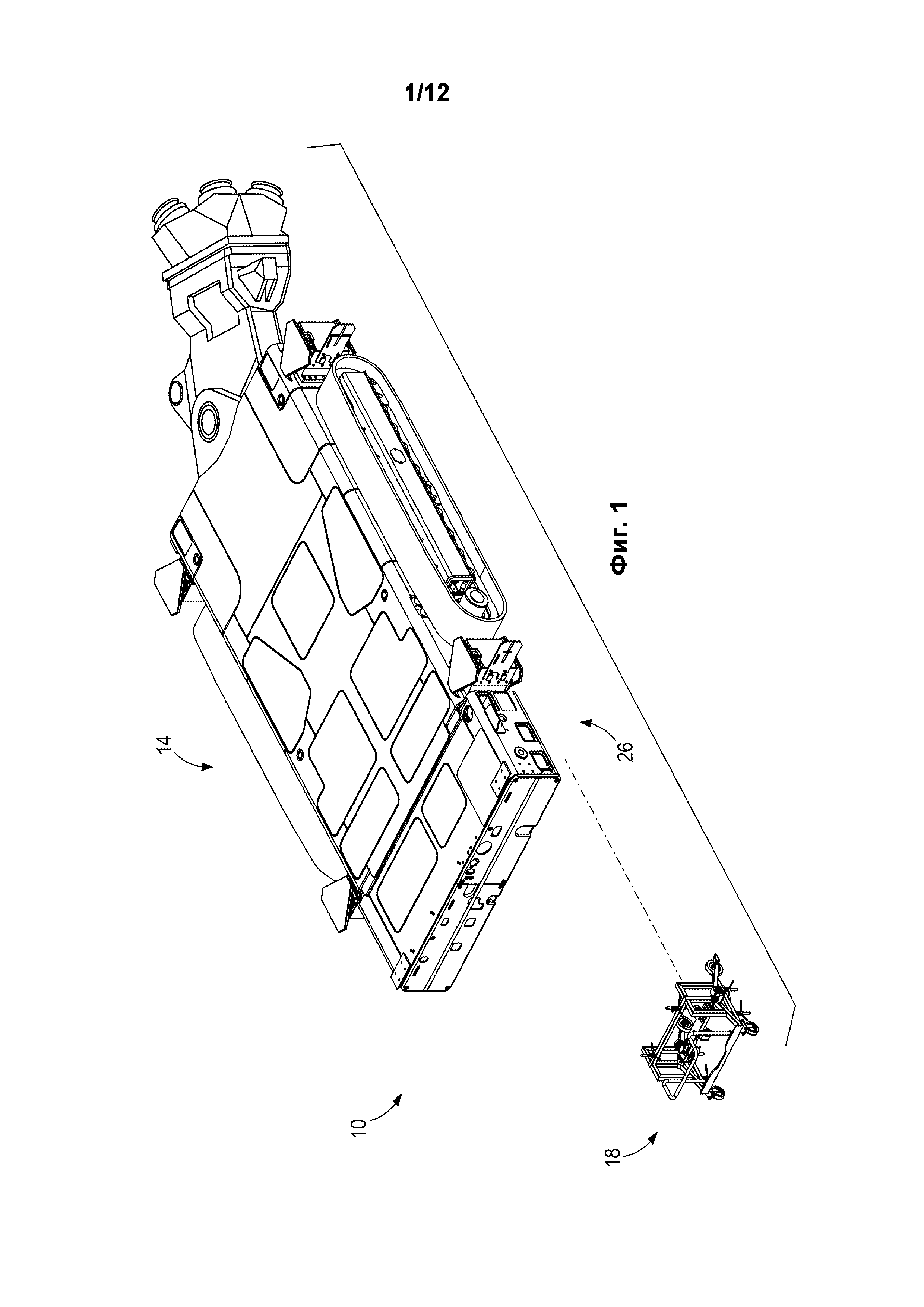
[0011] Фиг.1 - вид в перспективе системы наведения по одному варианту изобретения.
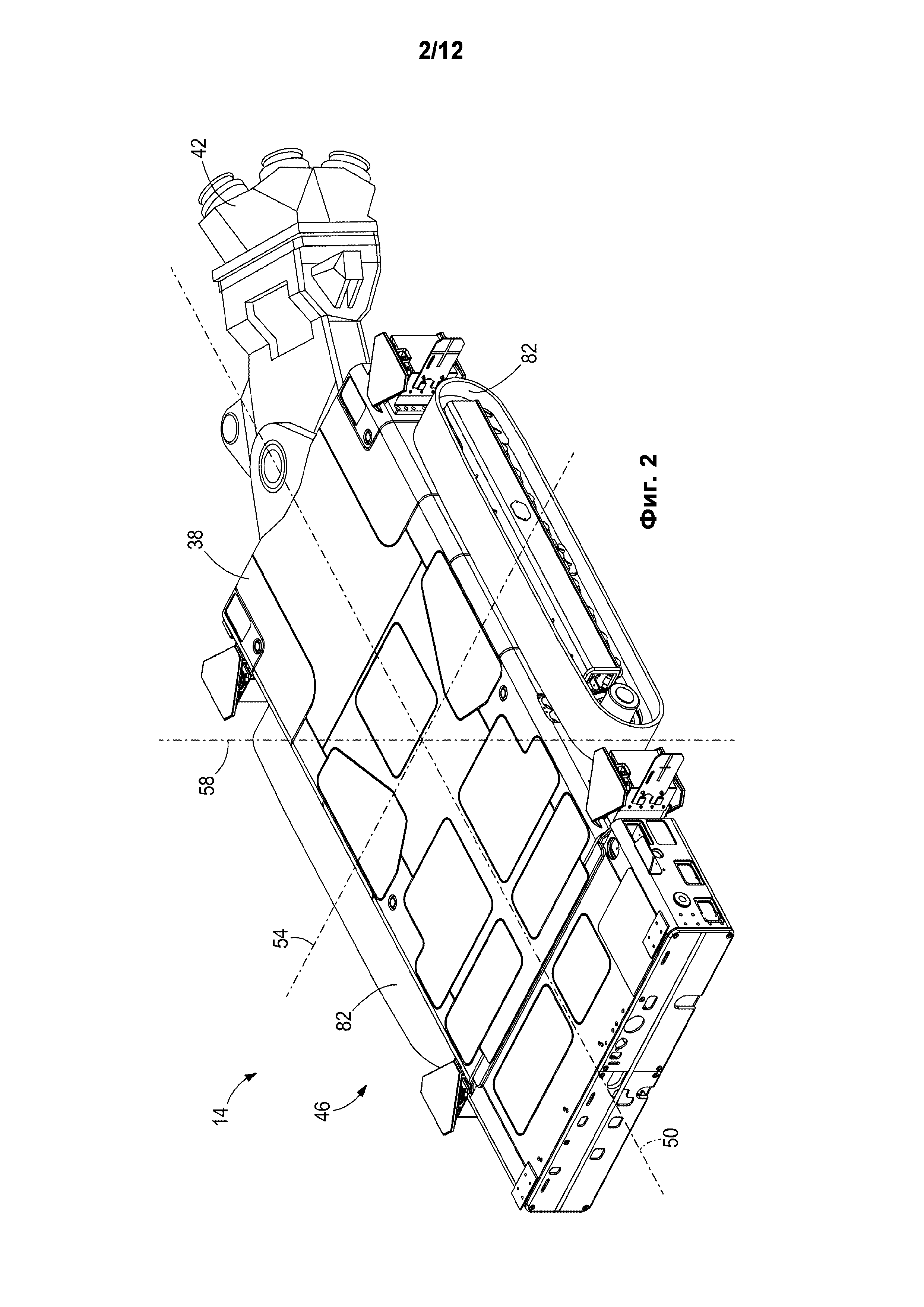
[0012] Фиг.2 - вид в перспективе горного комбайна.
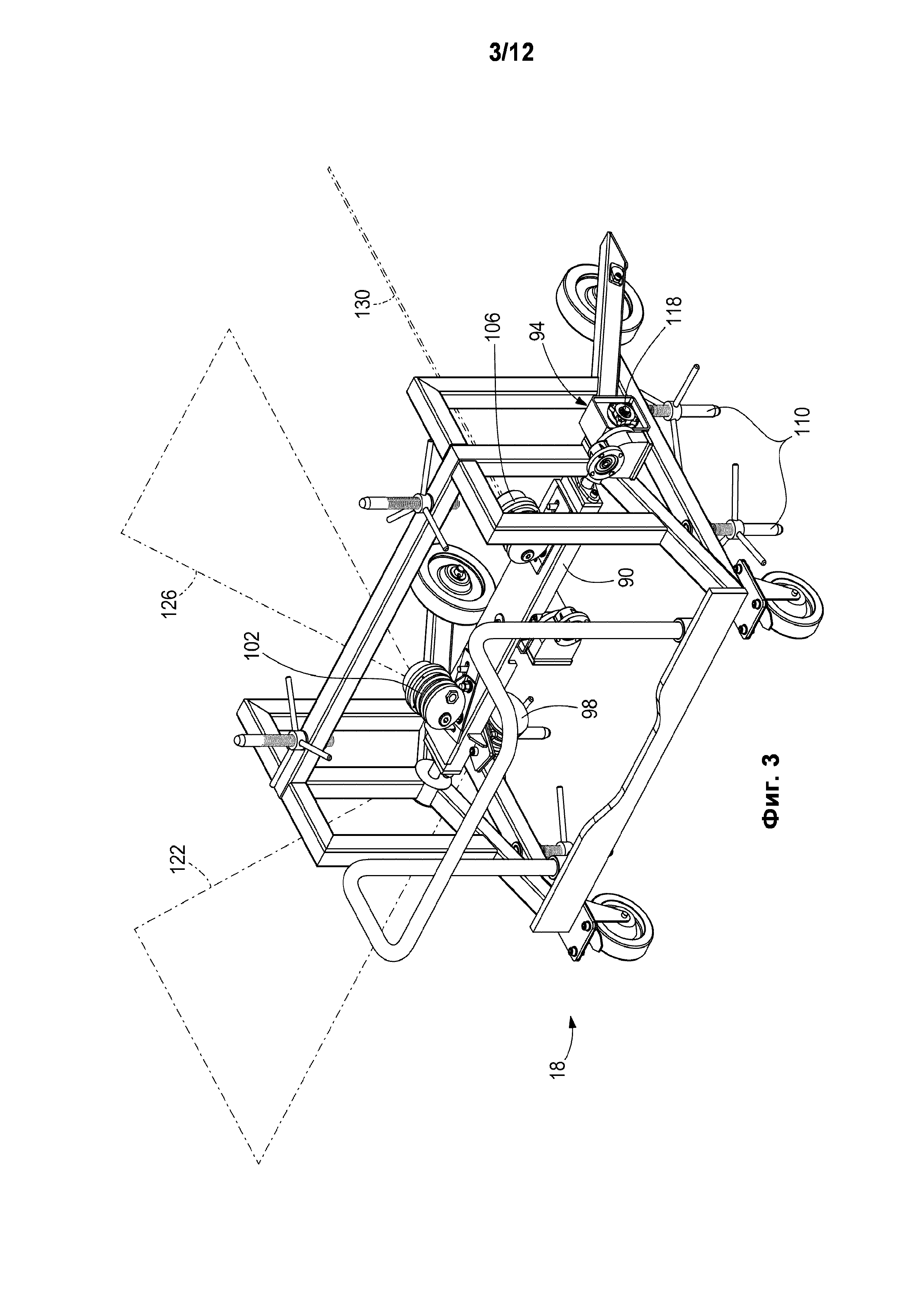
[0013] Фиг.3 - вид в перспективе каретки лазерного эмиттера.
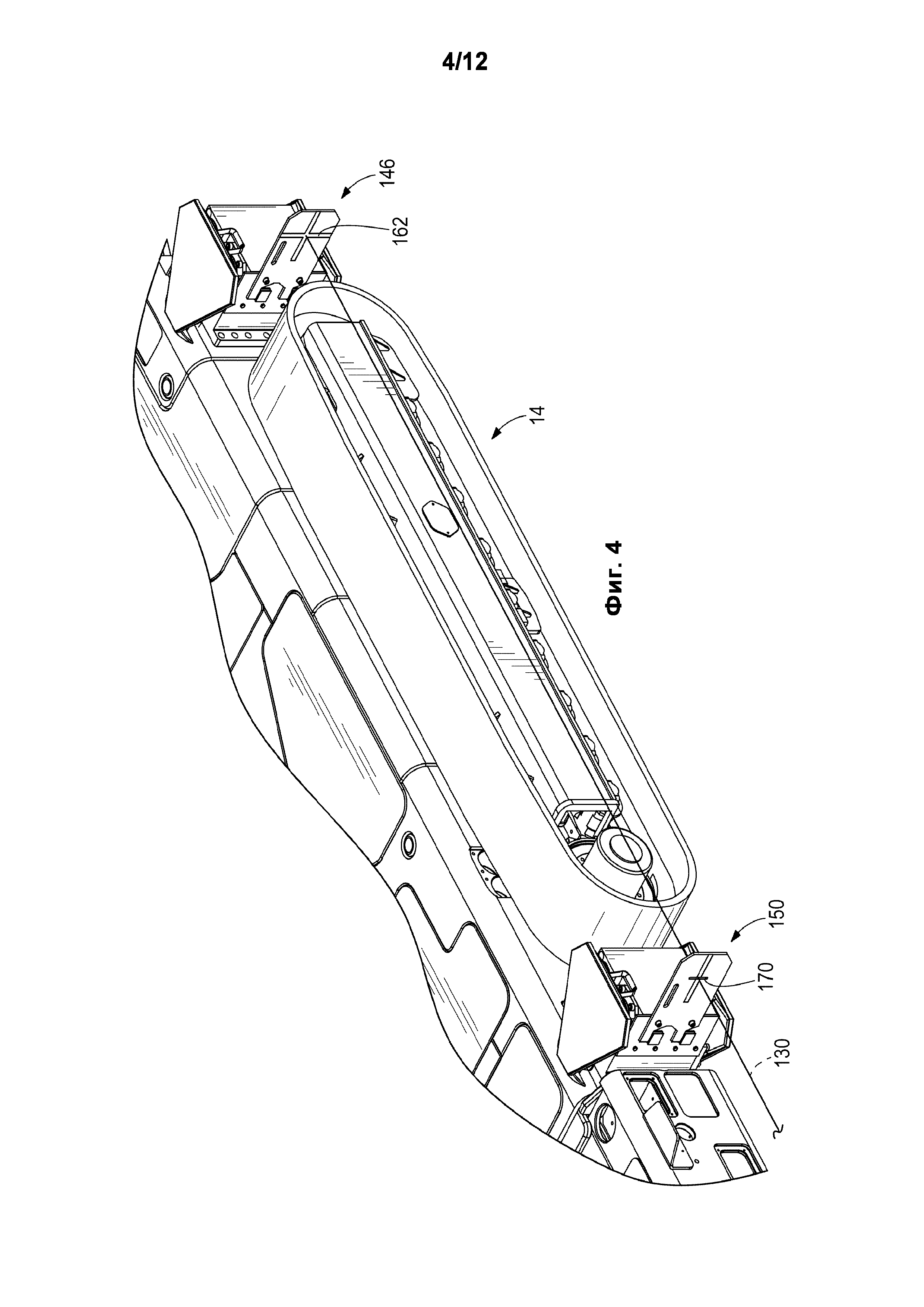
[0014] Фиг.4 - вид в перспективе правой стороны горного комбайна по фиг.2 в увеличенном масштабе.
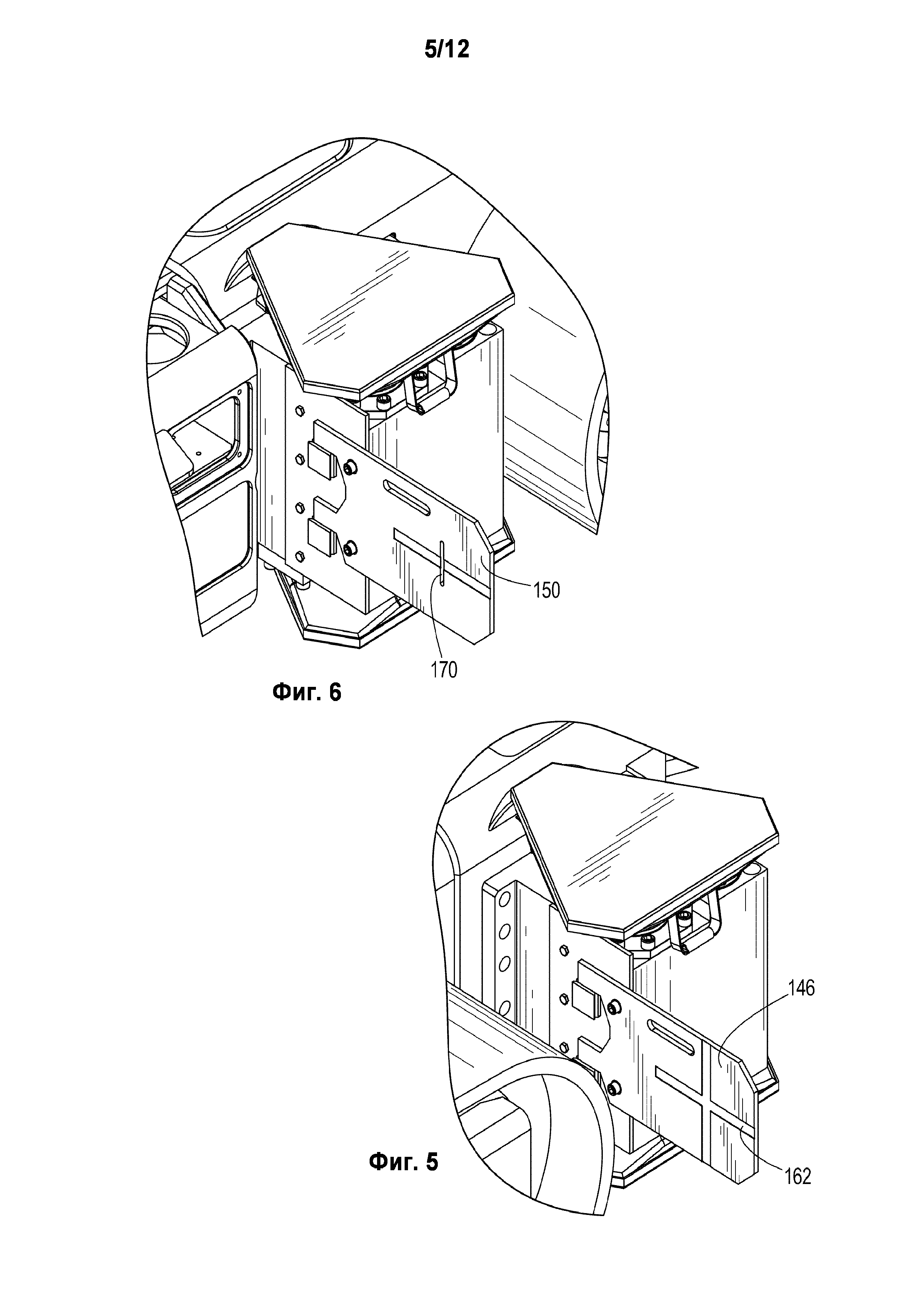
[0015] Фиг.5 - вид в перспективе первой мишени.
[0016] Фиг.6 - вид в перспективе второй мишени.
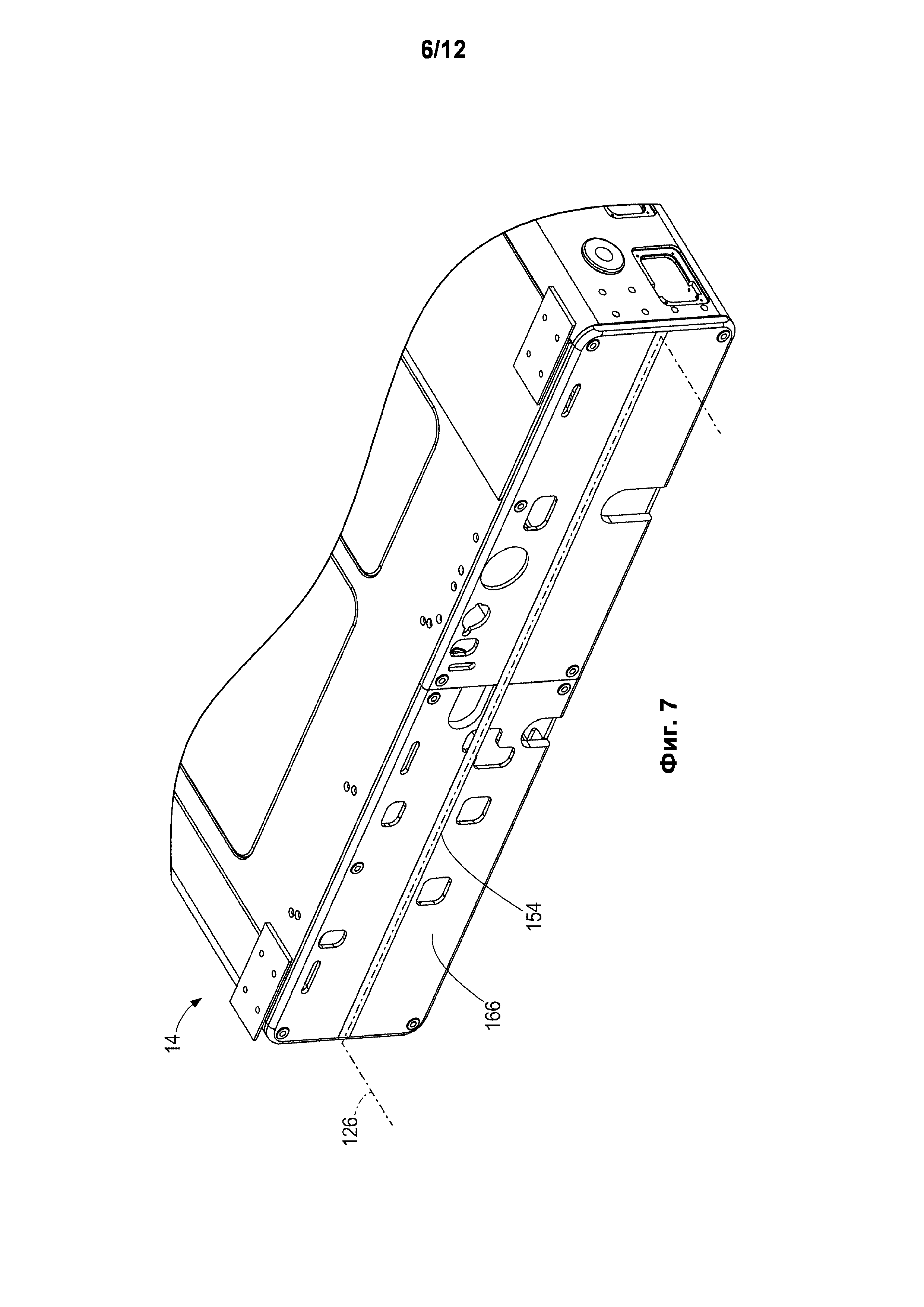
[0017] Фиг.7 - вид в перспективе заднего индикатора.
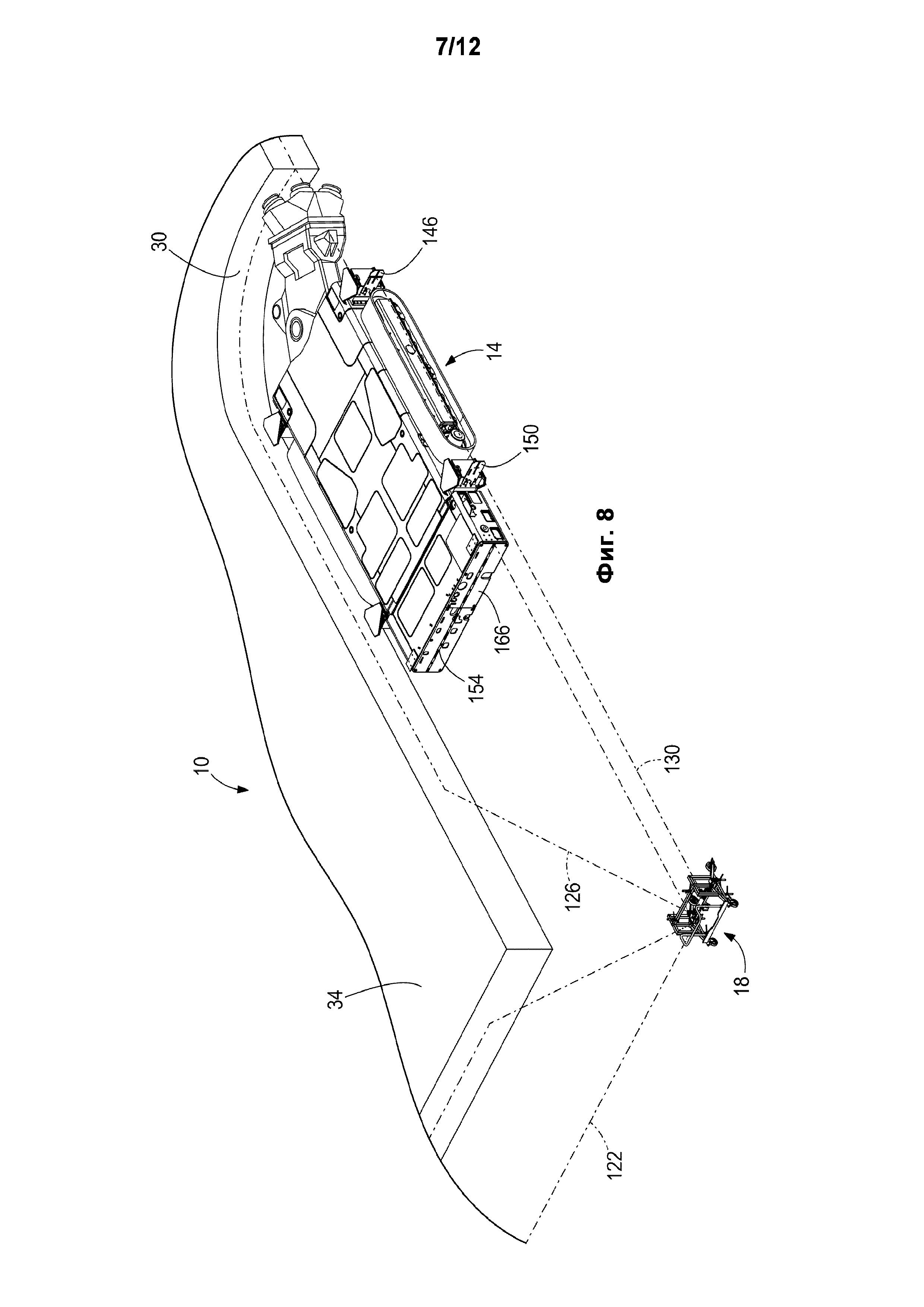
[0018] Фиг.8 - вид в перспективе системы наведения по фиг.1.
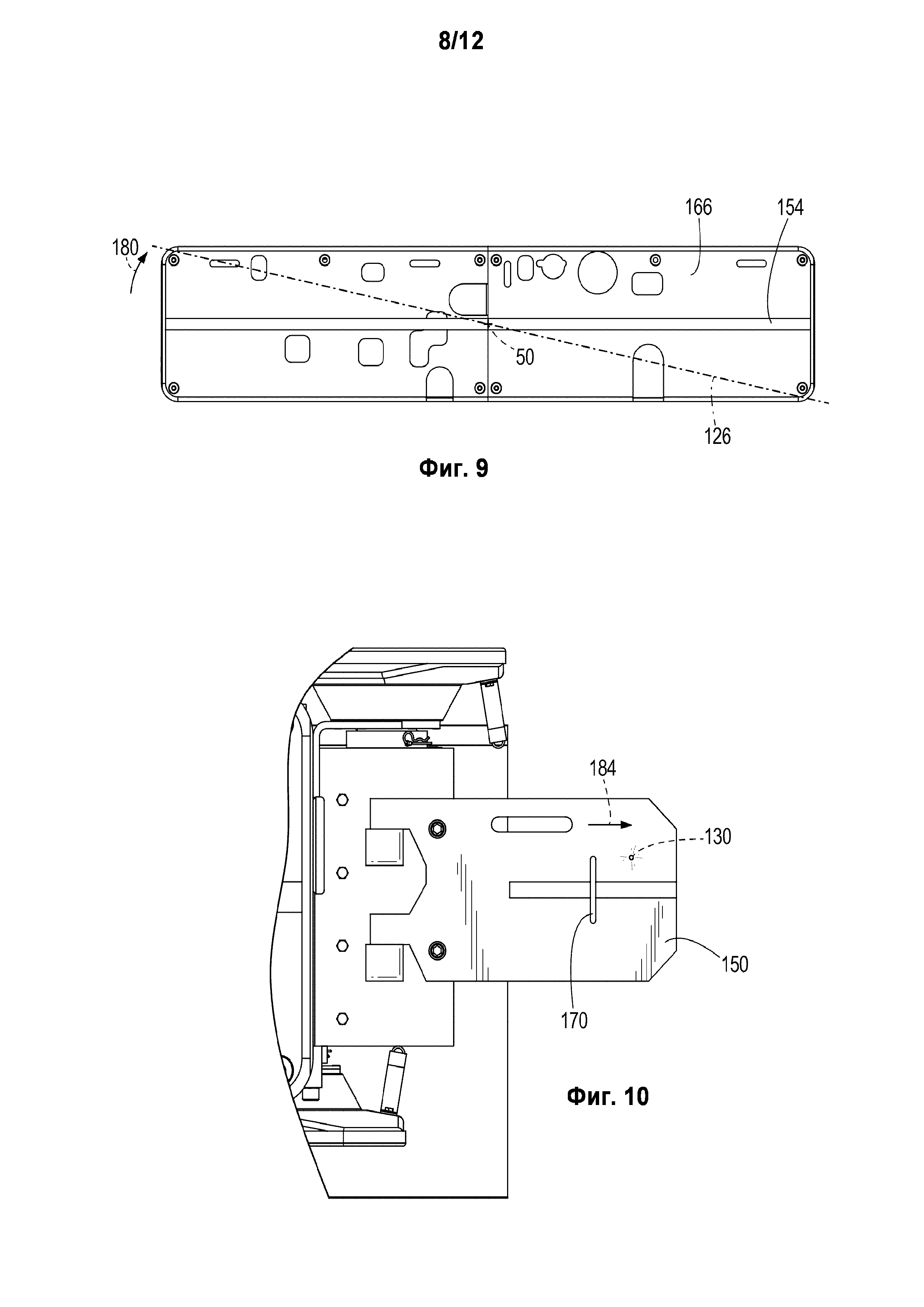
[0019] Фиг.9 - вид сзади конца горного комбайна по фиг.2.
[0020] Фиг.10 - вид сзади второй мишени по фиг.6.
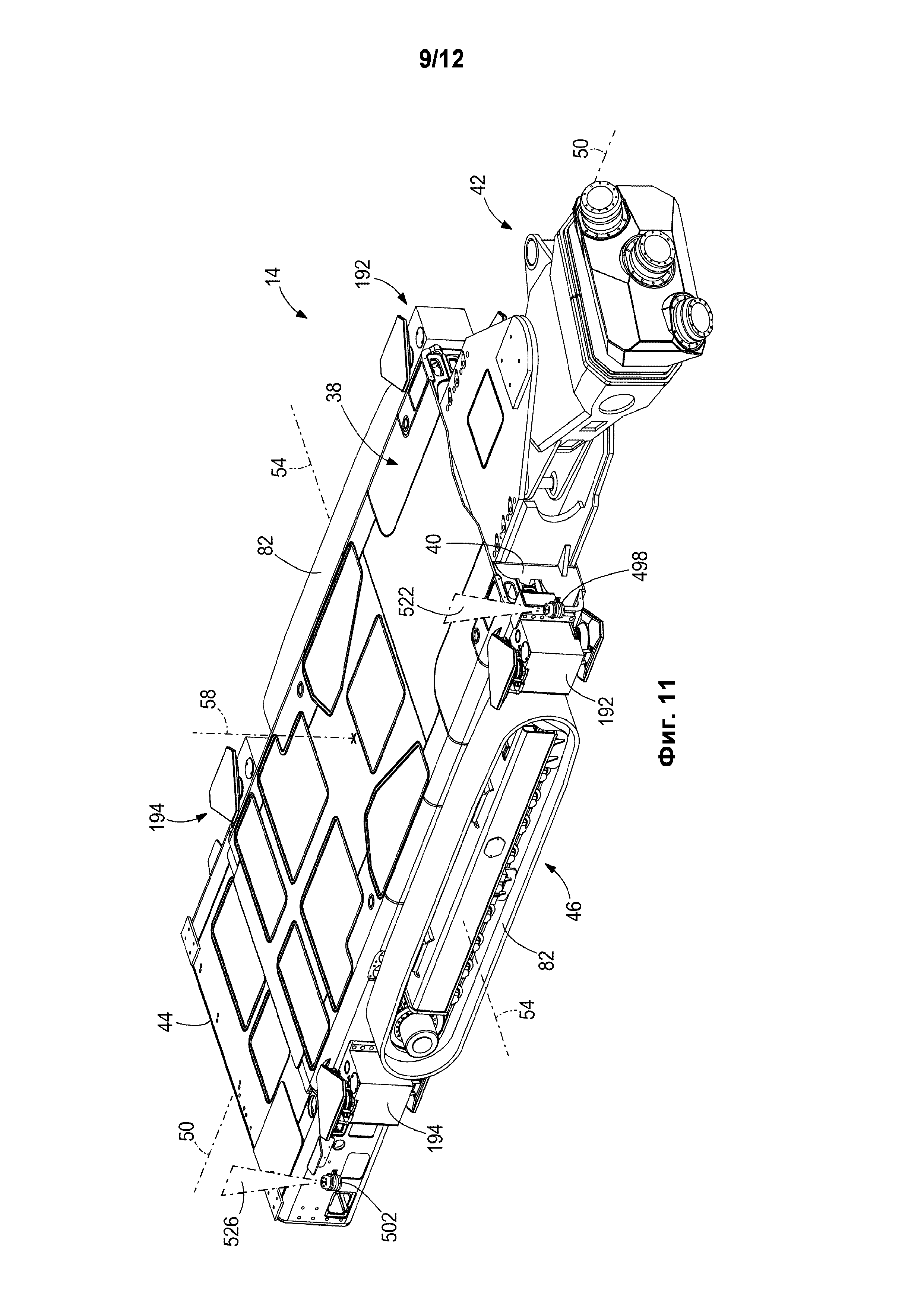
[0021] Фиг.11 - вид в перспективе горного комбайна, содержащего систему наведения по другому варианту.
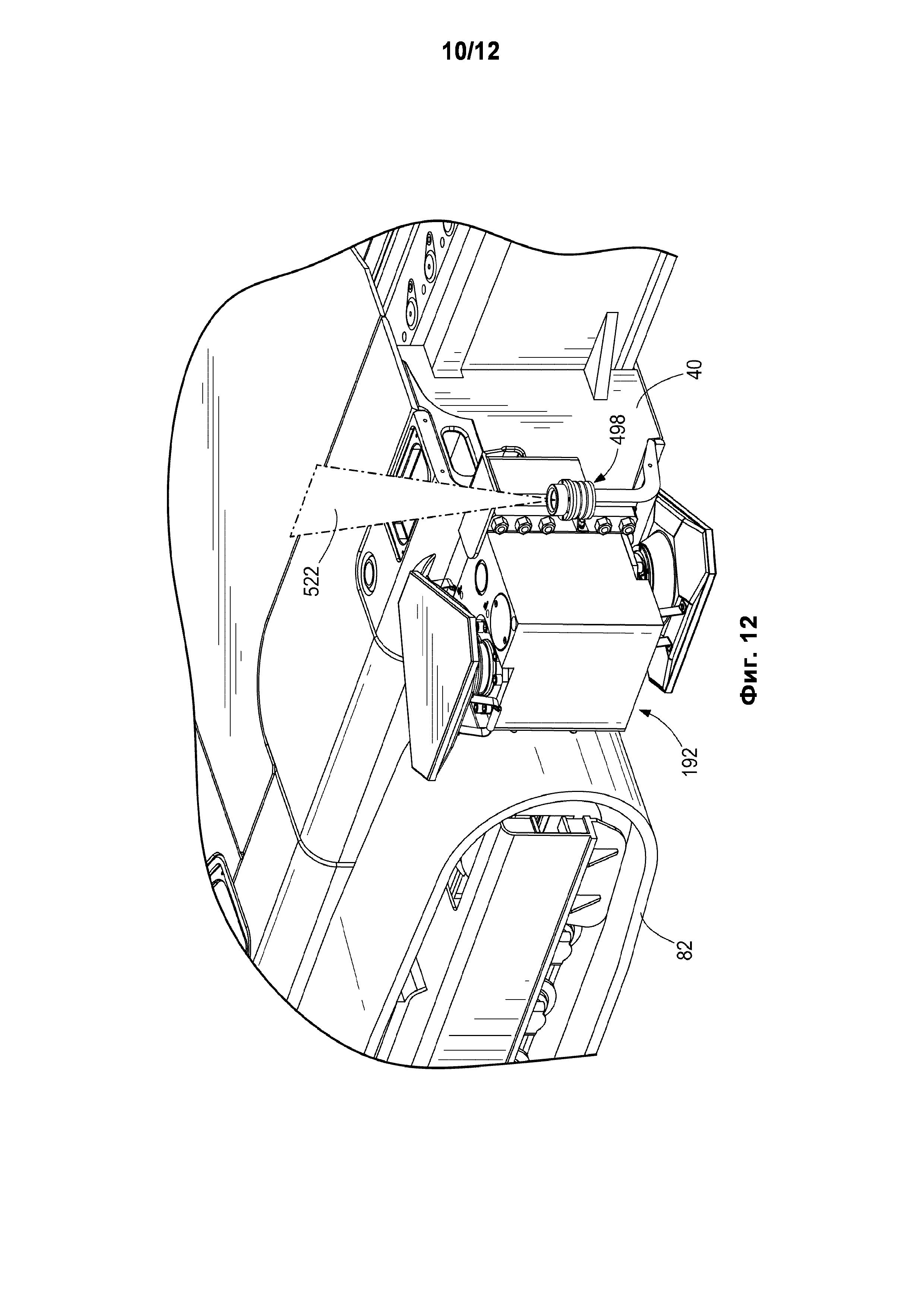
[0022] Фиг.12 - вид в перспективе части горной машины по фиг.11 в увеличенном масштабе.
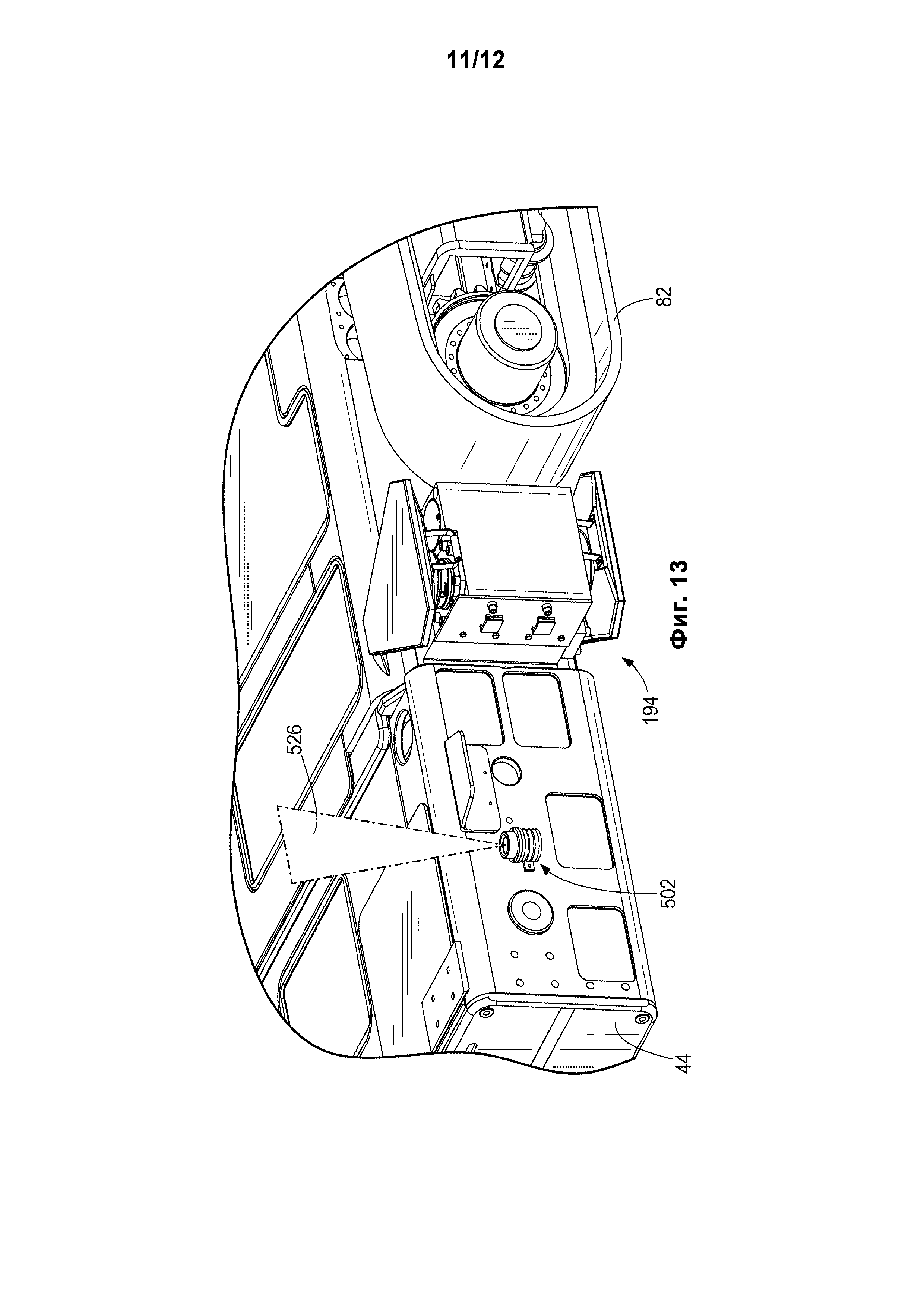
[0023] Фиг.13 - вид в перспективе части горной машины по фиг.11 в увеличенном масштабе.
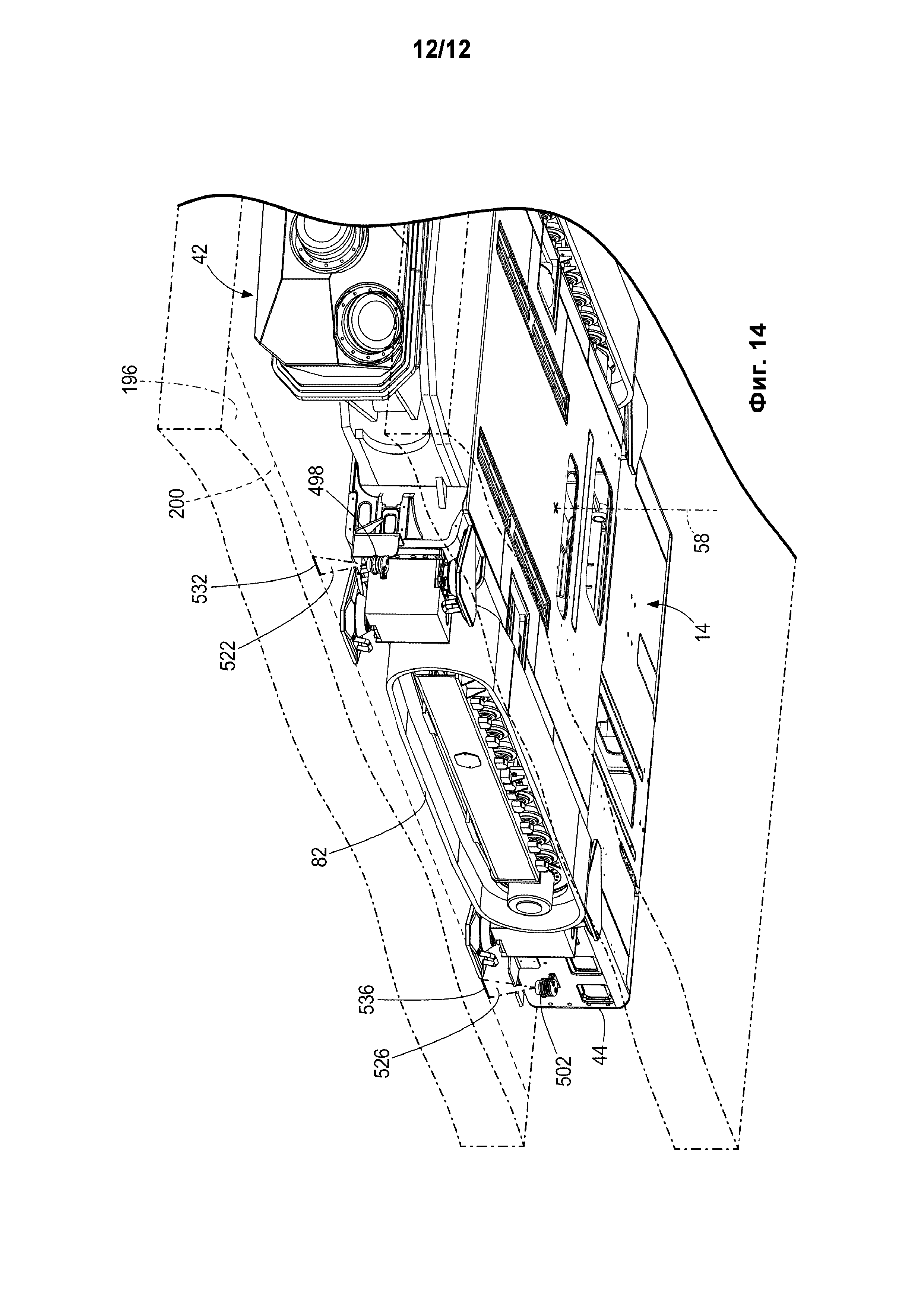
[0024] Фиг.14 - вид в перспективе горной машины по фиг.11, рядом со стеной выработки.
ПОДРОБНОЕ ОПИСАНИЕ
[0025] Прежде, чем приступить к подробному описанию какого-либо варианта настоящего изобретения следует понимать, что применение настоящего изобретения не ограничивается деталями конструкции и расположением компонентов, указанными в нижеследующем описании или показанными на приложенных чертежах. Изобретение может иметь другие варианты и осуществляться или реализовываться разными способами. Кроме того, следует понимать, что фразеология и терминология, использованные в описании, предназначена для описательных целей, и не должна считаться ограничивающей. Использование слов "включающий" или "содержащий" и их вариантов предназначено для обозначения перечисленных после них объектов и их эквивалентов, а также и дополнительных объектов. Применение выражения "состоящий из" и его вариантов в настоящем описании предназначено для обозначения только объектов, перечисленных после него и их эквивалентов. Если не указано или оговорено иное, термины "установленный", "соединенный", "поддерживаемый" и "подключенный" и их варианты применяются в широком смысле и охватывают как прямую, так и косвенную установку, соединение, поддержку и подключение.
[0026] На фиг.1 показана шахтная система 10 наведения содержащая горный комбайн 14, тележку или каретку 18 для лазерного излучателя, и узел 26 наведения, соединенный с горным комбайном 14. Горный комбайн 14 взаимодействует с забоем 30 пласта 34 минерала (фиг.8). Как показано на фиг.2, горный комбайн 14 содержит шасси или корпус 38, врубовую головку 42, соединенную с корпусом 38, и приводную систему 46 для перемещения корпуса 38. Корпус 38 определяет ось 50 крена, ось 54 тангажа и ось 58 рыскания. Ось 50 крена проходит через корпус 38 продольно. Ось 54 тангажа проходит через корпус 38 поперечно, а ось 58 рыскания проходит через корпус 38 вертикально. В показанном варианте приводная система 46 содержит пару гусениц 82 с каждой стороны корпуса 38. В других вариантах для перемещения комбайна 14 могут использоваться колеса.
[0027] Как показано на фиг.3, каретка 18 лазерного излучателя содержит основание 90, регулировочный узел 94, первый лазерный излучатель 98, второй лазерный излучатель 102, и третий лазерный излучатель 106. Основание 90 содержит четыре колеса для перемещения каретки 18 и множество установочных винтов 110 для фиксации каретки 18 относительно пола выработки. Регулировочный узел 94 содержит редуктор 118 для поворота каждого и лазерных излучателей 98, 102, 106 относительно основания 90. В показанном варианте первый лазерный излучатель 98 проецирует первый плоский лазерный луч 122. Первый плоский лазерный луч 122 плоско направлен на пласт 34. Второй лазерный излучатель 102 проецирует второй плоский лазерный луч 126, направленный на забой 30 пласта 34. Третий лазерный излучатель 106 проецирует лазерный луч 130, который направлен на забой 30. Регулировочный узел 94 позволяет поворачивать каждый лазерный излучатель 98, 102, 106 в трех измерениях, позволяя оператору направлять плоские лазерные лучи 122, 126 и лазерный луч 130 с высокой точностью. В одном варианте лазерные излучатели 98, 102, 106 можно точно регулировать для расстояния до 100 м.
[0028] Как показано на фиг.4-7, узел 26 наведения содержит первую мишень 146 (фиг.4), вторую мишень 150 (фиг.4) и индикатор 154 уровня (фиг.7). Как показано на фиг.4 и 5, первая мишень 146 соединена с горным комбайном 14 на одной стороне горного комбайна 14. Первая мишень 146 отходит от комбайна 14 и содержит перекрестье 162. Как показано ан фиг.4 и 6, вторая мишень 150 выровнена с первой мишенью 146 и содержит вертикальную щель 170. В показанном варианте обе мишени 146, 250 установлены на правой стороне комбайна 14, при этом первая мишень 146 установлена рядом с врубовой головкой, а вторая мишень установлена рядом с концом 166, противоположным врубовой головке 42. Как показано на фиг.7, индикатор 154 уровня расположен на конце 166 горного комбайна 14 и выполнен как линейный маркер, проходящий поперек конца 166 комбайна 14. В других вариантах первая мишень 146 и вторая мишень 150 могут быть установлены в других положениях относительно комбайна 14, и мишени 146, 150 и индикатор уровня могут иметь другие конфигурации маркеров.
[0029] На фиг.8 показана система 10 наведения в работе. Каретка 18 установлена за комбайном 14 и забоем 30 пласта 34. Каретка 18 зафиксирована на месте путем введения установочных винтов 110 в пол выработки. Первый плоский лазерный луч 122 совмещен с эффективной средней пласта 34. Эффективная средняя это плоскость, которая позволяет получить оптимальный выход при операции добычи. Способ определения эффективной средней специалистам известен и не требует дальнейшего описания. Второй плоский лазерный луч 126 совмещается с индикатором 154 уровня, а лазерный луч 130 выставляется так, чтобы проходить сквозь вертикальную щель 170 (фиг.4) второй мишени 150) и падать на перекрестье 163 (фиг.4) первой мишени 146. Горный комбайн 14 затем подкатывают в положение, примыкающее к забою 30, и начинают добывать материал из забоя 30.
[0030] По мере того как комбайн 14 проходит сквозь пласт 34, оператор отслеживает три лазерные проекции 122, 126 и 130, убеждаясь, что они остаются выровненными так, чтобы комбайн вел оптимальную добычу. Маневрируя комбайном 14 с помощью пульта дистанционного управления, оператор использует положения лазерных проекций 122, 126 и 130 как реперы для регулировки положения и ориентации комбайна 14. Во время проходки и перед началом последующей последовательности врубания, положения лазерных проекций 122, 126 и 130 проверяют и, при необходимости, ориентаций горного комбайна 14 регулируют, чтобы обеспечить точное управление направлением и положением.
[0031] Наблюдение за вторым плоским лазерным лучом 126 на индикаторе 154 уровня дает информацию об ориентации горного комбайна 14 относительно оси 50 крена. Например, если левая сторона комбайна 14 опускается ниже второго плоского лазерного луча 126, как показано на фиг.9, оператор маневрирует горным комбайном 14 так, чтобы поднять левую сторону. Эта операция приводит к повороту комбайн 14 в направлении 180, пока второй плоский лазерный луч 126 не выровняется с индикатором 154 уровня.
[0032] Наблюдение за лазерным лучом 130 на первой мишени 146 и второй мишени 150 дает информацию об ориентации комбайна 14 относительно оси 54 тангажа (фиг.2) и оси 58 рыскания (фиг.2). Если комбайн 14 находится в неправильном положении, лазерный луч 130 будет виден на второй мишени 150, указывая, как скорректировать ориентацию горного комбайна 14. Например, как показано на фиг.10, если лазерный луч 130 находится в верхнем правом углу второй мишени 150, оператор поворачивает комбайн влево. Это движение заставит вторую мишень 150 в направлении, показанном стрелкой 184, пока лазерный луч 130 не совместится с вертикальной щелью 170. Если затем лазерный луч попадает на первую мишень 146 и находится над центром перекрестья 162, оператор наклоняет переднюю часть комбайна 14 вверх. Эта операция сдвигает первую мишень 146 вверх относительно лазерного луча 130. Когда лазерный луч проходит сквозь вертикальную щель 170 второй мишени 150 и попадает в центр перекрестья 162, горный комбайн 14 выставлен и операция добычи продолжается. Расстояние от третьего лазерного излучателя 106 до забоя определяет ширину вруба.
[0033] После того, как будет выполнен вруб, лазерные излучатели 98, 102, 106 перемещают или регулируют для наведения на следующей фазе операции добычи. Устанавливая выравнивание между лазерными проекциями 122, 126, 130 и узлом 26 наведения, система 10 наведения обеспечивает, что горный комбайн остается "на пласте", или выровненным по эффективной средней пласта 34 минерала, даже если пласт 34 является наклонным.
[0034] На фиг.11-14 показан другой вариант системы 410 наведения. Для краткости, далее подробно будут описаны лишь отличия между системой 410 наведения и системой 10 наведения. Одинаковые детали обозначены теми же числовыми позициями плюс 400.
[0035] Как показано на фиг.11, система 410 наведения содержит первый излучатель 498 света и второй излучатель 502 света. Первый излучатель 498 света соединен с горным комбайном 14 рядом с первым или передним концом 40 (т.е., рядом с врубовой головкой 42), а второй излучатель 502 света расположен рядом со вторым или задним концом 44 комбайна 14. В показанном варианте комбайн 14 содержит пару передних домкратов 192, расположенных рядом с передним концом 40, и пару задних домкратов 194 рядом с задним концом 44. Домкраты 192, 194 выполнены с возможностью выдвигаться в направлении, параллельном оси 58 рыскания для подъема корпуса 38 и поддержки комбайна 14 относительно пола выработки или свода выработки.
[0036] В показанном варианте первый излучатель 498 света расположен перед приводной системой 46 и установлен рядом с передним домкратом 192, тогда как второй излучатель 502 света расположен сзади от приводной системы 46 и рядом с задним домкратом 194. Кроме того, в показанном варианте и первый излучатель 498 света, и второй излучатель 502 света установлены на правой стороне корпуса 38. В других вариантах излучатели 498, 502 могут быть расположены на другой стороне, или могут быть установлены между левой стороной и правой стороной. Дополнительно, на корпусе 38 могут быть установлены дополнительные излучатели. Первый излучатель 498 света излучает первую лазерную проекцию 522, а второй излучатель 502 излучает вторую лазерную проекцию 526.
[0037] В показанном варианте излучатели 498 502 света являются веерными лазерами так, что первая проекция 522 и вторая проекция 526 имеют планарную форму. В показанном варианте первая проекция 522 и вторая проекция 526 расположены в одну линию друг с другом, и первая проекция 522 и вторая проекция 526 лежат в общей плоскости. В показанном варианте плоскость, определенная первой и второй проекциями 522, 526, ориентирована параллельно продольной оси или оси 50 крена, и отходит перпендикулярно оси 50 крена в направлении верхнего висячего крыла сброса или свода выработки (фиг.14). Другими словами, первая и вторая проекции 522, 526 могут проходить перпендикулярно и оси 50 крена, и оси 54 тангажа (фиг.11). В некоторых вариантах, плоскость определенная проекциями 522, 526 проходит параллельно оси 58 рыскания (фиг.11). Плоскость, определенная первой проекцией 522 и второй проекцией 526, по существу параллельно направлению продвижения горного комбайна 14.
[0038] Как лучше всего показано на Фиг.14, каждая проекция 522, 526 образует прямые линии 532, 536, соответственно, на своде 196. В зависимости от размера лазерных проекций 522, 526, линии 532, 536 могут налагаться одна на другую и выглядеть как сплошная непрерывная линия, или как отдельные сегменты линии, разделенные друг от друга одним или более зазором.
[0039] Перед операцией добычи на своде 196 рисуют линию 200 (фиг.14) и выравнивают с заранее определенным направлением врубания или направлением подачи горного комбайна 14. Оператор может использовать эту линию 200 или может создать (например, аэрозольным баллончиком с краской) вторую линию, параллельную линии 200. В варианте, показанном на фиг.14, комбайн 14 расположен так, что проекции 522, 526 совмещены с линией 200 для выравнивания комбайна с направлением подачи. Во время работы оператор следит за положением проекций 522, 526 относительно линии 200, чтобы комбайн оставался выровненным. Линия 200 проходит на достаточное расстояние, чтобы комбайн 14 мог начать и закончить полный цикл врубания.
[0040] Система 410 наведения является простой и незамысловатой системой для выравнивания комбайна 10, когда комбайн движется через пласт. Система 410 наведения сокращает время калибровки и наладки, тем самым сокращая время простоя машины между циклами врубания.
[0041] Таким образом, согласно настоящему изобретению предлагается, помимо прочего, система наведения для горного комбайна. Различные признаки и преимущества изобретения перечислены в приложенной формуле.
Мониторинг крепления кровли в системе сплошной разработки
Мониторинг горизонта для сплошной системы разработки
Управление конвейером в горнодобывающей системе
Карта конвейерной цепи для системы горной разработки
Панорамное изменение наклона в длиннозабойной врубовой системе
Система и способ отслеживания устойчивости кровли выработки с длинными забоями (варианты)
Конвейерный рештак
Управление производительностью горнодобывающей системы
Системы и способы для оценки подземных дорожных условий с использованием акселерометров
Система и способ обнаружения затупленных и изношенных резцов

