Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ АВТОКОЛОННЫ ИЗ ГРУЗОВЫХ АВТОМОБИЛЕЙ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[001] Изобретение относится к способу автономного формирования автоколонны грузовых автомобилей большой грузоподъемности.
УРОВЕНЬ ТЕХНИКИ
[002] На сегодняшний день грузовые автомобили большой грузоподъемности оборудуются системами рулевого управления, в которых введение электродвигателя (либо в качестве дополнительной системы, либо даже в качестве полной замены гидравлической системы) стало уже уровнем техники. Электродвигатель задействует колеса и поддерживает перемещения рулевого колеса. Общим для всех этих электрических систем рулевого управления является то, что им необходима система управления с датчиками. Кроме того, эти системы управления соединены с другими системами управления транспортным средством. Такие активные системы рулевого управления могут также использоваться для реализации Усовершенствованных систем содействия водителю (Advanced Driver Assistance Systems), которые могут использоваться для взаимодействия с водителем, помощи ему в дорожных ситуациях и даже облегчения автономного управления движением. Основная проблема состоит в обеспечении содействия водителю или даже поддержки автономного управления движением в вариантах применения при формировании автоколонны для грузовых автомобилей большой грузоподъемности, в частности автопоезда из грузового автомобиля и прицепа. Формирование автоколонны, то есть управление движением в колонне двух или более грузовых автомобилей, в частности автопоездов из грузового автомобиля и прицепа, по существу увеличивает эффективность использования топлива в грузовых автомобилях, с одной стороны, и снижает нагрузку на водителя в такой задаче очень точного высокоскоростного маневрирования с ограниченной обзорностью, с другой стороны. Кроме того, повышается (дорожная) безопасность, поскольку устраняется человеческий фактор, и максимизируется использование дороги (в смысле большего количества грузовых автомобилей с прицепами на участок дороги) за счет управления движением на короткой дистанции. Наконец, что не менее важно, производительность водителя может быть повышена, поскольку водитель может выполнять другие задачи, такие как администрирование, отдых и т.д., в течение поездки в случае режима автономного управления движением. Формирование автоколонны является основой для новых будущих автоматизированных логистических транспортных концепций. Поэтому существует большая потребность в совершенствовании и оптимизации этих систем.
[003] Одна из многих трудностей заключается в том, что даже для сенсорных систем с камерами обзорность слишком ограничена, чтобы обеспечить надежную систему управления формированием автоколонны из двух грузовых автомобилей, следующих друг за другом на малой дистанции, например, менее 10 метров, или даже менее 5 метров. Для этого требуется система управления следования за транспортным средством со временем срабатывания, которое значительно меньше времени человеческой реакции, которое находится в диапазоне от 1 до 1,5 секунд в зависимости от (натренированных) навыков и уровня бдительности водителя. Современный уровень техники при формировании автоколонны и соответствующая система датчиков имеют время задержки в диапазоне от 200 до 500 мс. Это время задержки ограничивает минимизацию дистанции следования за транспортным средством (чем она меньше, тем больше выгода от формирования автоколонны). Для компенсации такого «медлительного» реагирования системы управления формированием автоколонны также устанавливается связь между транспортными средствами для беспроводной (через WiFi) передачи фактических состояний транспортного средства, таких как ускорение, замедление и углы рулевого управления от впередиидущего транспортного средства следующему транспортному средству. Это достаточно хорошо работает по части управления двигающимися транспортными средствами в продольном направлении или интервалом движения, но по-прежнему оказывается проблематичным в отношении оптимизации управления двигающимися транспортными средствами в поперечном направлении (например, при смене полосы движения и управлении движением по криволинейным полосам движения). Следует отметить, что рулевое управление не только приводит к поперечному смещению транспортного средства, но также и вовлекает движение по углу рыскания. При рассмотрении автопоезда из грузового автомобиля и прицепа становится очевидно, что данная трудность значительно увеличивается по сравнению с транспортными средствами без прицепа. Например, нужно избежать эффектов «виляния концевой части», «виляния прицепа» и «срезания углов». Следовательно, существует потребность в улучшенных надежных концепциях и способах формированием автоколонны с управлением в поперечном направлении. Таким образом, несмотря на то, что эти системы начинают появляться в (коммерческих) грузовых транспортных средствах большой грузоподъемности, в частности, по типу более 6 тонн, по-прежнему существует значительная проблема относительно размерности этих систем, ввиду трудности управления движением на малой дистанции автопоезда с прицепом, что обуславливает стимулирующие требования, например, к задержке датчика, области обзора камеры и качеству сигнала от датчика, вследствие требований к стабильности и производительности при управлении движением на короткой дистанции. Для таких вариантов применения формирования автоколонны, например, стабилизация по прямой, отставание от дистанции езды или набегание на нее и экстренное торможение представляют трудности, которые обуславливают практические проблемы для текущего состояния технологии уровня техники.
[004] В частности не совсем возможно соблюдать параметры движения в поперечном направлении при следовании за автопоездом из грузового автомобиля и прицепа, так как это представляет собой только косвенное измерение рулевых передвижений грузового транспортного средства. Если такая проблема не решена должным образом, это может привести к резонансному кинематическому поведению следующего грузового автомобиля вследствие отсутствия системного демпфирования во всей системе управления следованием за транспортным средством в автоколонне.
[005] В других системах предшествующего уровня техники, например DE102015010441, предусматривается определение положения транспортного средства и анализ сцены множеством видов с камер с неперекрывающимися зонами обнаружения. Камеры функционируют совместно с алгоритмом для определения курса полосы движения, в частности, когда область обзора частично загораживается движущимся объектом.
[006] Также в DE102015010535 используется множество камер для выявления окружающей обстановки вокруг транспортного средства. В таком варианте реализации обеспечивается центральная камера переднего вида в дополнение к боковым камерам, следящим за боковым диапазоном транспортного средства и (частично) заменяющим зеркало заднего вида. В одном примере компромисс достигается за счет комбинации камер для видения боковой разметки полосы движения и дорожных знаков. Никакого формирования автоколонны не упоминается.
[007] В работе Tsugawas Adayuki «Результаты и проблемы автоматизированной автоколонны грузовых автомобилей в рамках проекта Energy ITS», 2014 слушания IEEE симпозиума интеллектуальных транспортных средств IEEE, 8 июня 2014 (Tsugawas Adayuki: Results and issues of an automated truck platoon within the energy ITS project», 2014 IEEE intelligent vehicles symposium proceedings IEEE), грузовой автомобиль спереди и сзади снабжен блоками машинного зрения. В данном положении боковая разметка полосы движения не может быть достоверно обнаружена в условиях формирования автоколонны.
[008] Существует потребность в обеспечении надежного способа автономно формирования автоколонны из автопоезда из грузового автомобиля и прицепа в практической конфигурации. Кроме того необходим эффективный вычислительный алгоритм для определения местоположения ведущего автопоезда из грузового транспортного средства с прицепом, в частности, задней части впередиидущего прицепа по отношению к курсу полосы движения и положение грузового автомобиля с прицепом и курсового направления (или угла рыскания) непосредственно следующего транспортного средства по отношению к курсу полосы движения. Последнее используется для бортового управления (обратной связи) собственного движения для избегания неустойчивых резонансов в поперечном направлении при следовании за впередиидущим транспортным средством. Кроме этого, также существует потребность в резервном (в отношении взаимной дистанции между транспортными средствами) системном средстве измерения интервала движения, в частности, подходящем для достижения SAE-уровня 3, 4 и 5 автоматики, когда система автономного управления движением должна наблюдать за своим собственным состоянием безопасности. В настоящее время для выполнения надежной оценки измерения дистанции интервала движения обычно применяется объединение радара и датчика GPS, в основном слитно с монокамерой переднего вида, которая использует так называемые методики «структуры из движения». В этом смысле очень желательно установить очень точную систему прямого измерения в виде системы со стереокамерой для повышения надежности и уменьшения времени задержки системы. Настоящее изобретение предусматривает также решение и в этом отношении.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[009] Настоящее изобретение направлено на предоставление способа направления моторного транспортного средства на основании данных изображения при автономном управлении движением моторного транспортного средства в автоколонне, следующей за ведущим транспортным средством, посредством контроллера рулевого управления, соединенного с системой рулевого управления, и контроллера интервала движения, принимающего информацию о взаимной дистанцией транспортного средства относительно ведущего транспортного средства и управляющего указанной дистанцией, при этом согласно способу:
управляют посредством контроллера управления в поперечном направлении, соединенного с указанным контроллером рулевого управления, дистанцией транспортного средства в поперечном направлении относительно первой стороны полосы движения,
при этом контроллер управления в поперечном направлении выполнен с возможностью принимать входные сигналы от первого датчика стороны полосы движения, установленного в первом местоположении на передней стороне транспортного средства, и от второго датчика стороны полосы движения, установленного во втором местоположении на передней стороне транспортного средства, находящегося напротив указанного первого местоположения на передней стороне транспортного средства, причем входной сигнал является опорной дистанцией до наблюдаемой первой и/или второй стороны полосы движения, при этом первый и второй датчики пространственно разнесены на расстояние равное или, больше ширины транспортного средства.
[0010] Предпочтительно, контроллер рулевого управления выполнен с возможностью управления системой рулевого управления на основании управления демпфируемой дистанцией транспортного средства в поперечном направлении, определяемой указанными датчиками сторон полосы движения, до любой из первой и второй сторон полосы движения. Соответственно функция демпфирования предназначена для обеспечения стабильного поведения при собственном движении транспортного средства в течение смены полосы движения и/или поперечного смещения или колебаниях по углам рыскания в системе формирования автоколонны следования за транспортным средством. Соответственно, может быть предотвращено распространение от ведущего транспортного средства по автоколонне ошибок рулевого управления (недоезд или выезд).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Изобретение дополнительно изложено на чертежах, на которых:
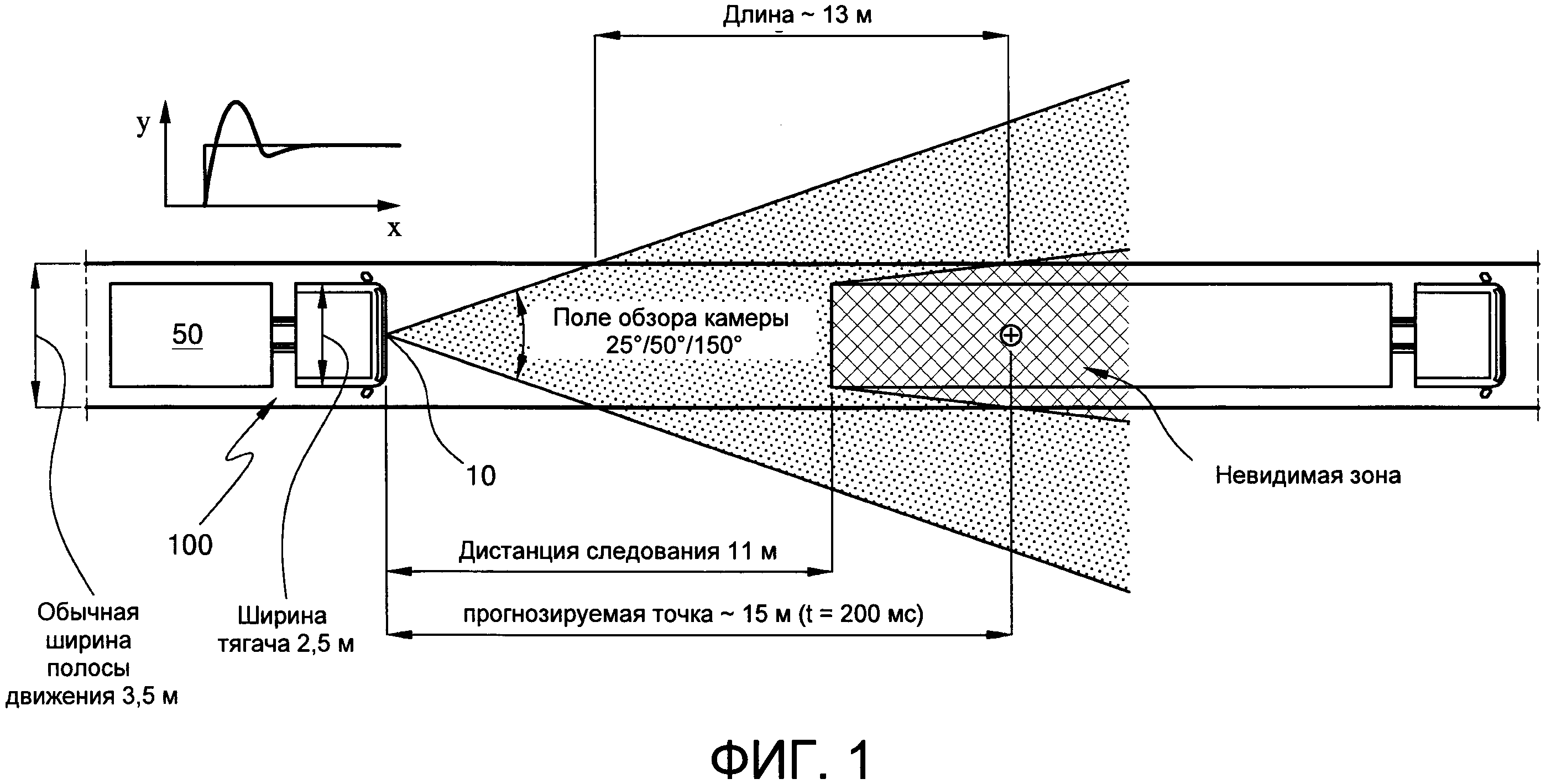
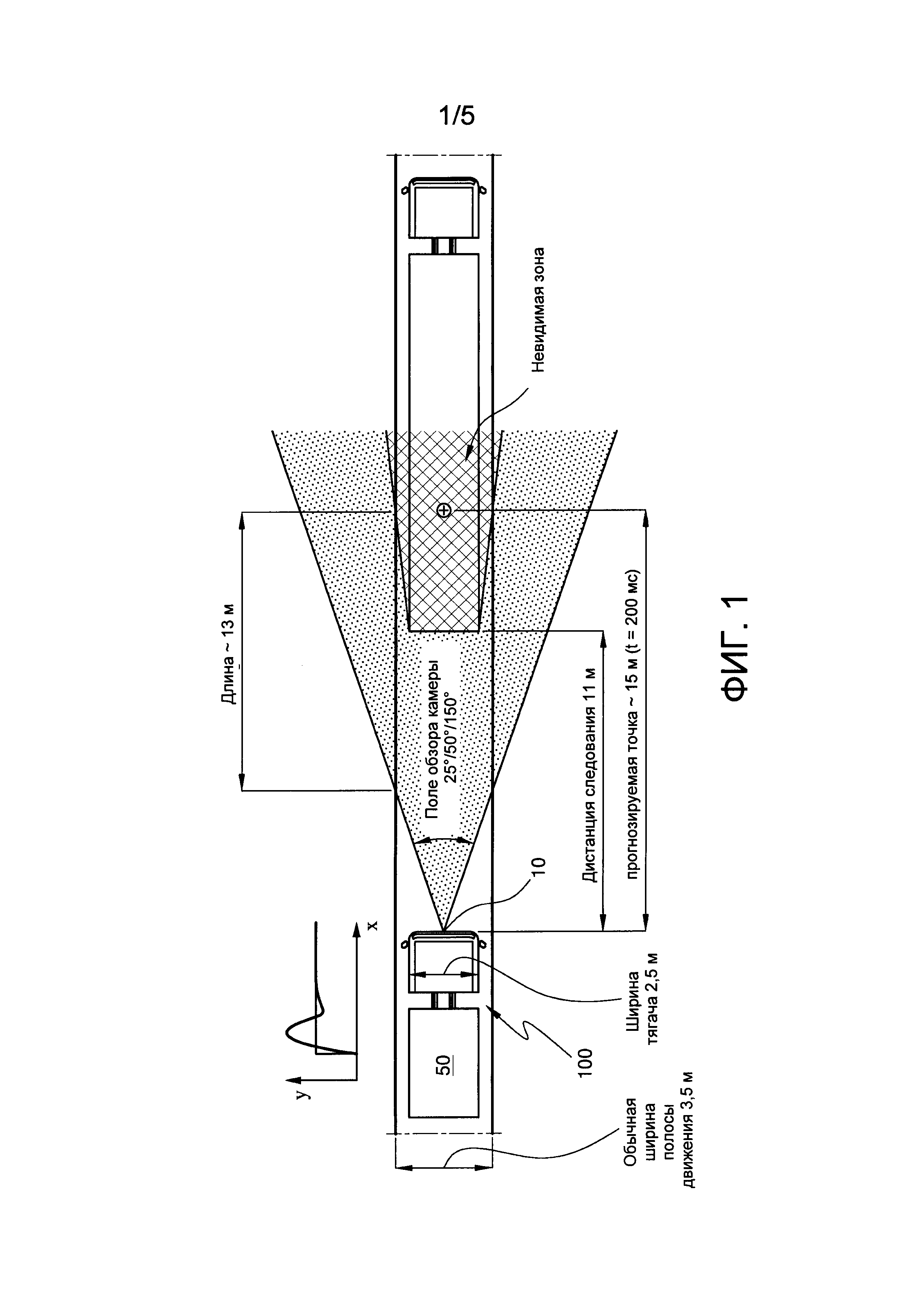
[0012] На ФИГ. 1 показана конфигурация предшествующего уровня техники по направлению моторного транспортного средства на основании данных изображения, при автономном управлении движением моторного транспортного средства при формировании автоколонны, следующей за ведущим транспортным средством;
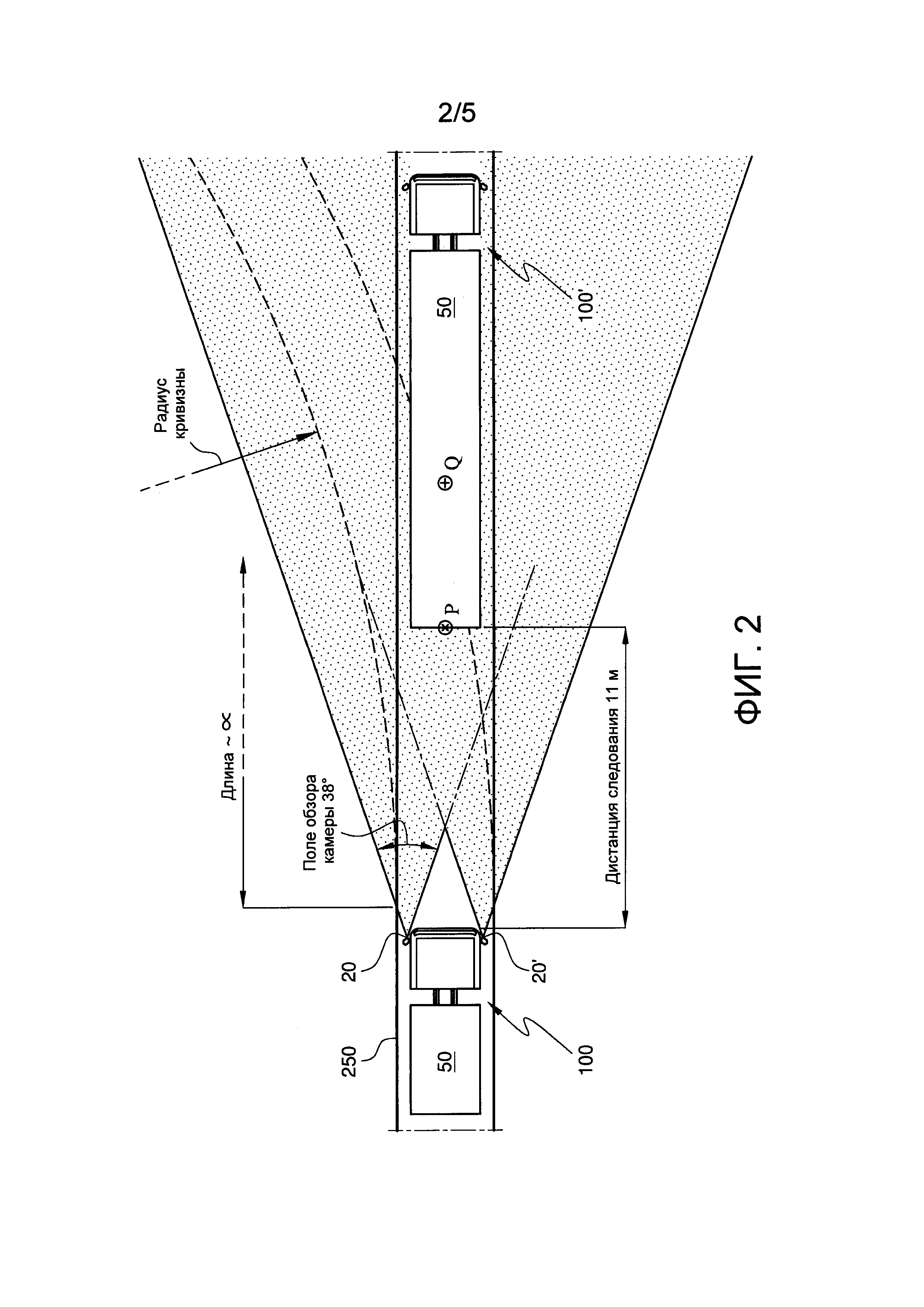
[0013] На ФИГ. 2 показана конфигурации согласно одному варианту осуществления настоящего изобретения;
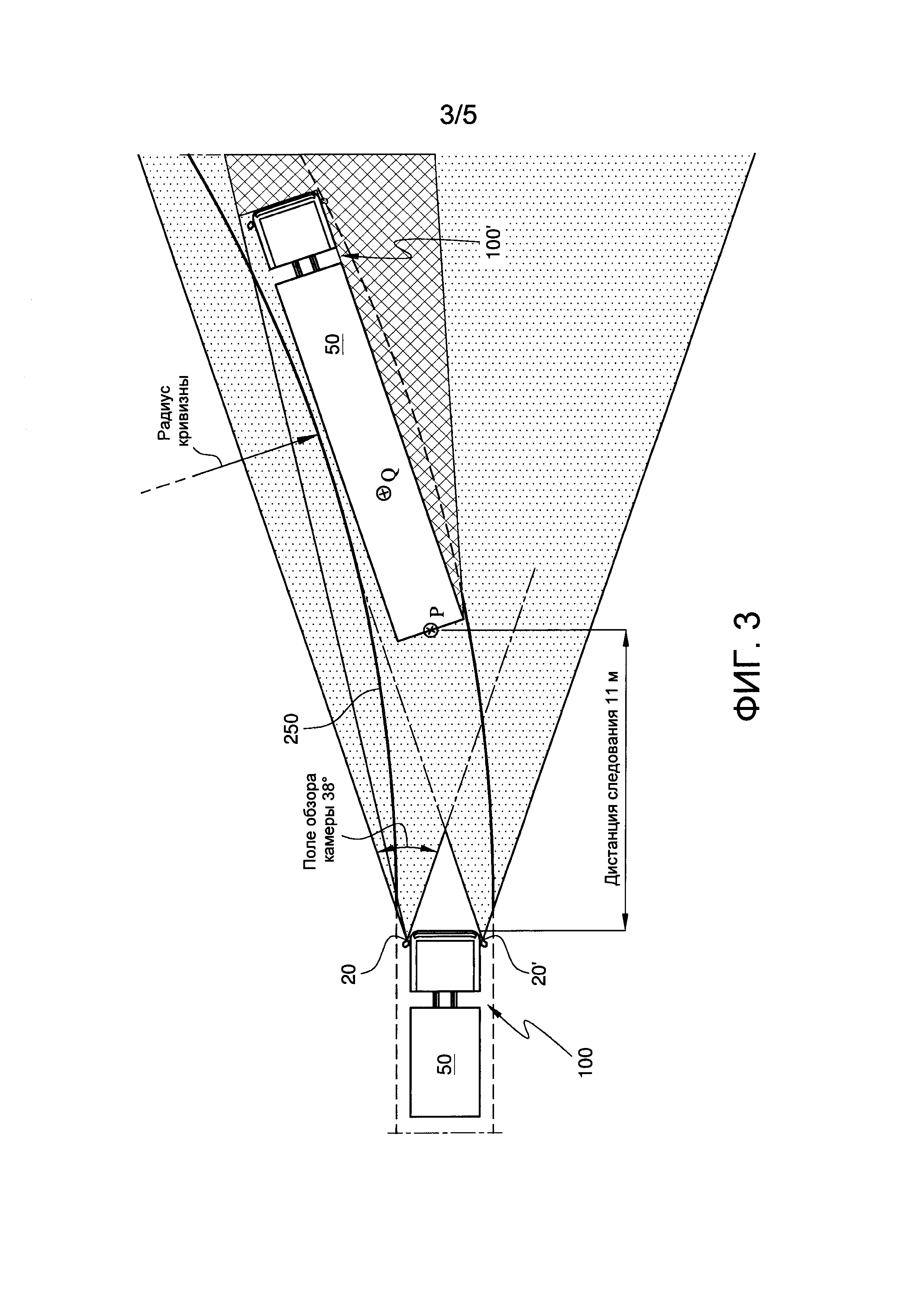
[0014] На ФИГ. 3 показана конфигурация по ФИГ. 2 на криволинейном участке дорожной полосы движения.
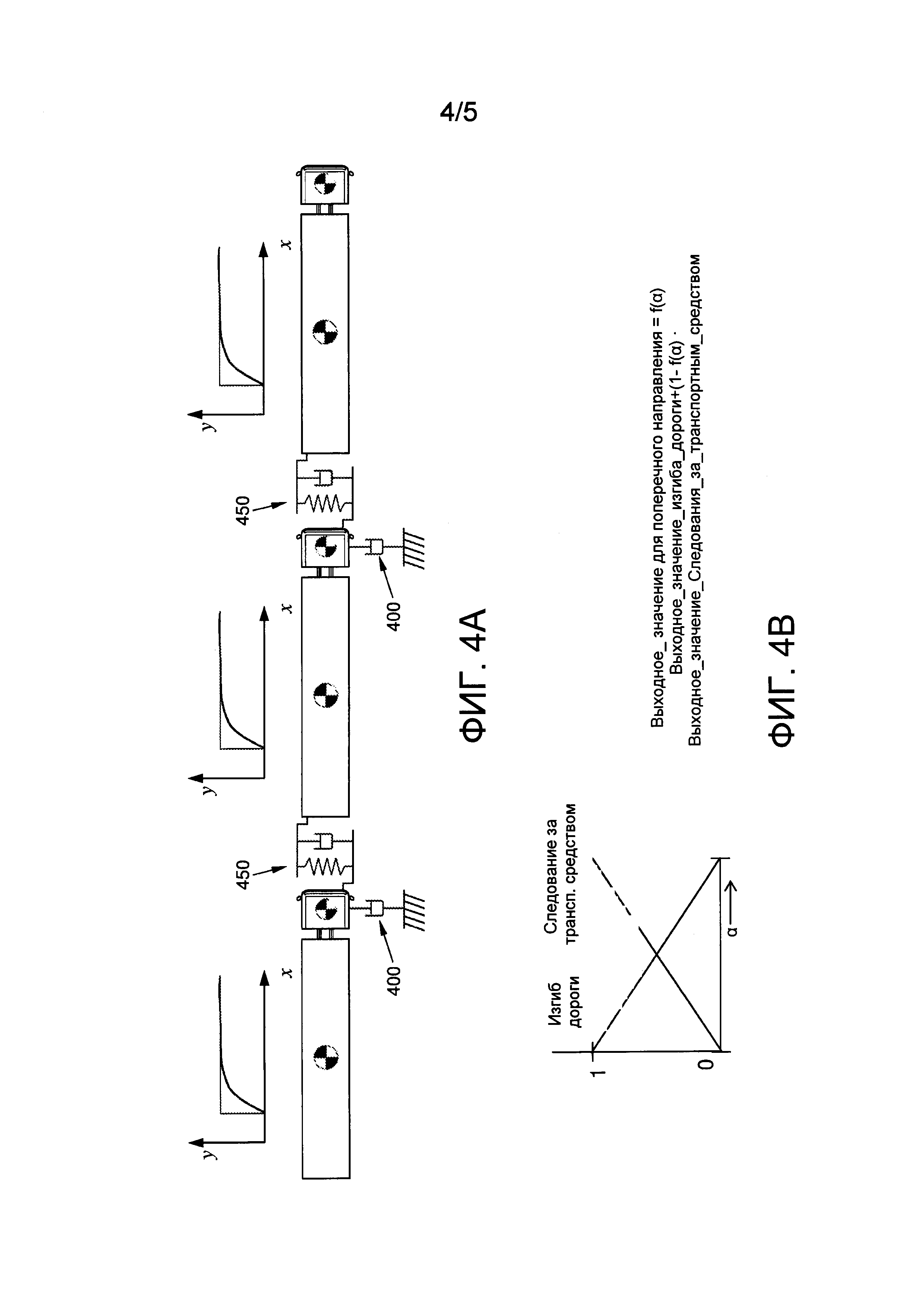
[0015] На ФИГ. 4A показан принцип действия управления при изгибе дороги в дополнение к конфигурации традиционного управления в поперечном направлении при следовании за транспортным средством, а на ФИГ. 4B показано примерное управление на выходе, которое активно балансирует между этими двумя дополнительными стратегиями управления в поперечном направлении;
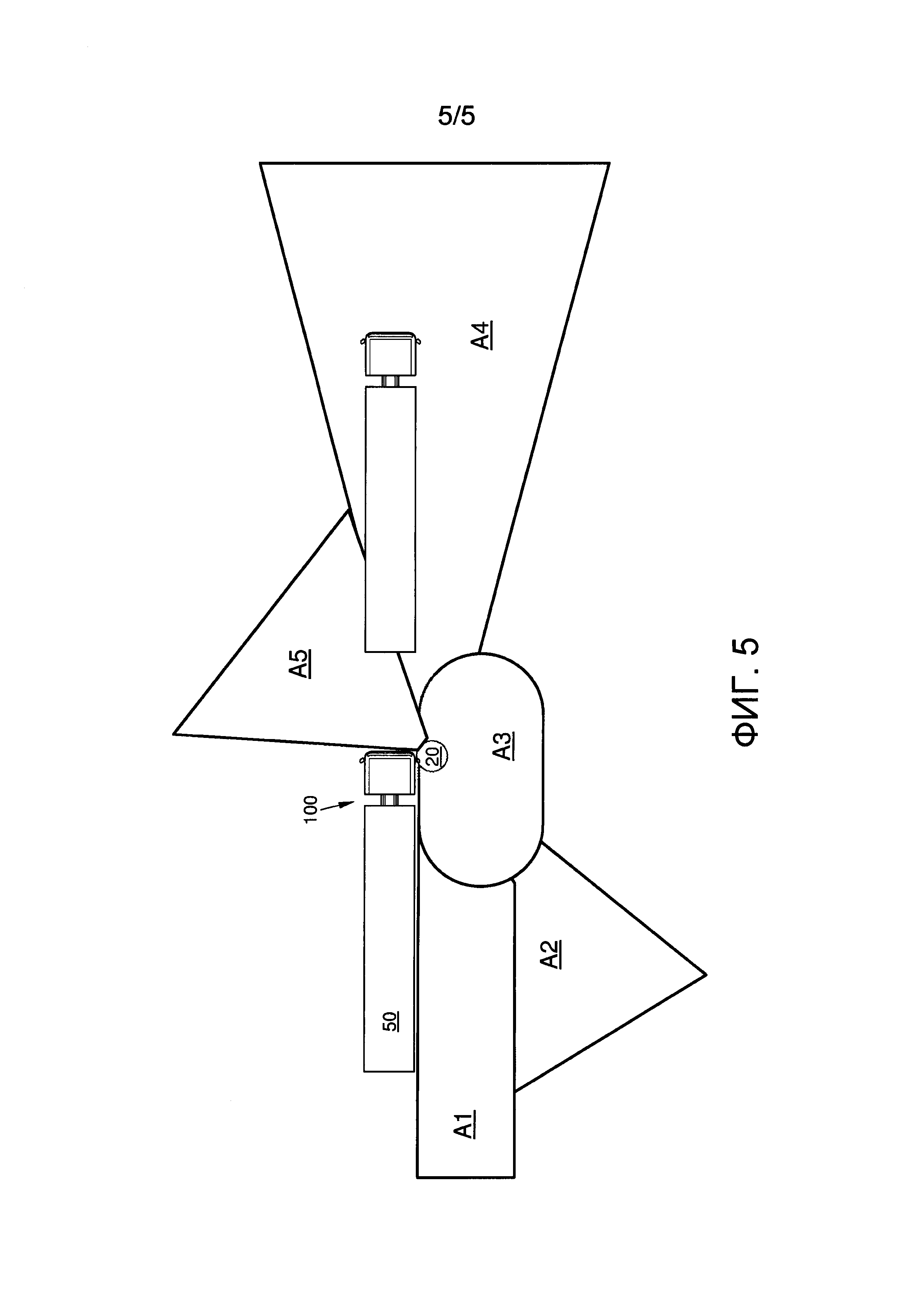
[0016] На ФИГ. 5 показан дополнительный вариант осуществления для дополнительного управления камерами, установленными на боковом зеркале.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0017] Пока не указано обратное, все термины (включая технические и научные термины), используемые в данном документе, имеют одно и то же значение, которое является общим в понимании средними специалистами в уровне техники, которому данное раскрытие принадлежит при прочтении в контексте описания и чертежей. Дополнительно следует понимать, что термины, определяемые в словарях общего пользования, должны толковаться в качестве имеющих значение, которое соответствует их значению в контексте связанного уровня техники, и не должны толковаться в идеализированном или чрезмерно формальном смысле, пока это явно не будет указано в данном документе. В некоторых случаях, подробные описания хорошо известных устройств и способов могут быть пропущены, чтобы не загромождать описание настоящих систем и способов. Терминология, используемая для описания отдельно взятых вариантов осуществления, не предназначена ограничивать настоящее изобретение. Подразумевается, что используемые в данном документе формы единственного числа также включают в себя формы множественного числа, пока в контексте ясно не будет указано обратное. Термин «и/или» включает в себя любое и все сочетания из одного или более из связанных перечисленных элементов. Дополнительно должно быть понято, что термины «содержит» и/или «содержащий» определяют наличие изложенных признаков, но не исключают наличия или добавления одного или более других признаков. Все публикации, заявки на патент, патенты и другие источники, упомянутые в данном документе, заключены во всей своей полноте посредством ссылки. В случае противоречий настоящее описание, включая определения, будет иметь первостепенное значение.
[0018] Термин «контроллер» используется традиционным образом для обозначения любой структурной аппаратной или программной установки, имеющей возможность исполнения программной логики для обеспечения некоторой основной функции. Специалисту в данной области техники обычно известно то, как использовать или реализовывать схему в контексте настоящего описания, с элементами процессора, объясненными ниже. Например, «контроллер рулевого управления» содержит элементы аппаратного и/или программного обеспечения, предназначенные для цели, как будет дополнительно изображено в данном документе ниже, определения текущего положения грузового автомобиля. Данная информация используется для расчета заданных точек в качестве входной информации для фактической действующей системы рулевого управления, которая (вертикально) поворачивает колеса на дороге для следования по необходимому (вслед за транспортным средством) пути транспортного средства.
[0019] Кроме того контроллер интервала движения имеет программную логику для управления трансмиссией и двигателем и для торможения грузового автомобиля, для ускорения или замедления грузового автомобиль, для регулирования заданного интервала движения или заданной взаимной дистанции между грузовым автомобилем и ведущим транспортным средством. Программная логика контроллера интервала движения может содержать схему управления с обратной связью, то есть на основе входных сигналов от датчиков, которые измеряют взаимную дистанцию между грузовым автомобилем и ведущим транспортным средством, от радара, лазерного локатора, из изображения от стереокамеры или их сочетания, в качестве необязательной возможности дополнительно к схеме управления с прямой связью исходя из входных сигналов управления, принимаемых через сигнальные линии от ведущего транспортного средства.
[0020] Контроллер управления в поперечном направлении имеет программную логику для управления системой рулевого управления грузового автомобиля, регулирования заданной взаимной дистанции в поперечном направлении между грузовым автомобилем и полосой движения или дорожной боковой разметкой. Программная логика контроллера управления в поперечном направлении может содержать схему управления с обратной связью, основанную на входных сигналов от датчиков, которые измеряют взаимную дистанцию в поперечном направлении между грузовым автомобилем и полосой движения или дорожной боковой разметкой, от радара, лазерного локатора, из изображения от стереокамеры или их сочетания при необходимости дополнительно к схеме управления с прямой связью входными сигналами управления, принимаемыми через сигнальные линии от ведущего транспортного средства. Контроллер управления в поперечном направлении соединен с возможностью осуществления связи с контроллером рулевого управления, который активно управляет рулевое движение рулевым колесом грузового автомобиля. В некоторых вариантах осуществления управление в поперечном направлении и управление интервалом движения объединены в единой системе управления. Термин «программная логика» используется традиционным образом для обозначения функциональных инструкций, которые могут быть воплощены в аппаратных или программных структурах, которые управляют схемой для предназначенного функционального действия.
[0021] Термин «сигнальная линия» используется традиционным образом для обозначения информации, обмениваемой через передачу сигналов, которая может принимать форму закодированных сигналов, аналоговым или цифровым способом посредством любого традиционного устройства связи, где не исключается, что доступны другие сигнальные линии, а приведен всего лишь для обозначения того, что доступна некоторая возможность соединения. Этот термин может также указывать косвенную возможность соединения, то есть сигнальная линия может быть обеспечена посредством косвенной передачи сигналов, например, через другое функциональное устройство.
[0022] Процессор может быть выделенным процессором для функционирования в соответствии с настоящей системой или может быть универсальным процессором, в котором только одна из многих функций задействуются для функционирования в соответствии с настоящей системой. Процессор может функционировать с использованием части программы, множества участков программы, или может быть аппаратным устройством, использующим выделенную или универсальную интегральную схему. Может использоваться любой тип процессора, в частности выделенный или совместно используемый. Процессор может включать в себя микроконтроллеры, центральные блоки обработки (CPU), блоки графической обработки (GPU), цифровой(ые) сигнальный(ые) процессор(ы) (DSP), ASIC или любой(ые) другой(ие) процессор(ы) или контроллер(ы), такие как цифровые оптические устройства, или аналоговые электрические схемы, которые выполняют одни и те же функции и используют электронные методики и архитектуру. Контроллер или процессор могут дополнительно содержать запоминающее устройство, которое может быть частью или может быть функционально соединено с контроллером. Запоминающее устройство может быть любым подходящим типом запоминающего устройства, в котором хранятся данные. Любой носитель, известный или разрабатываемый, который может хранить и/или передавать информацию, подходящую для использования с настоящими системами и способами, может использоваться в качестве запоминающего устройства. Запоминающее устройство может также хранить предпочтения пользователя и/или данные приложений, доступные контроллеру для конфигурирования его на выполнение функциональных действий в соответствии с настоящими системами и способами.
[0023] Несмотря на то, что изображены примерные варианты осуществления для систем и способов, также альтернативные варианты могут быть предусмотрены специалистами в уровне техники, которые обладают преимуществом настоящего раскрытия для достижения подобной функции и результата. Например, некоторые компоненты могут быть объединены или разделены на один или более альтернативных компонентов. Наконец, эти варианты осуществления предназначены всего лишь для иллюстрации настоящей системы и не должны рассматриваться в качестве ограничения прилагаемой формулы изобретения до какого-либо отдельно взятого варианта осуществления или группы вариантов осуществления. Таким образом, несмотря на то, что настоящая система была описана в частных подробностях со ссылкой на конкретные примерные варианты ее осуществления, следует также понимать, что многочисленные видоизменения и альтернативные варианты осуществления могут быть разработаны средними специалистами в уровне техники без отступления от объема настоящих систем и способов, изложенных в последующей формуле изобретения. Описание и чертежи должны соответственно расцениваться в качестве иллюстративных и не должны подразумеваться в качестве ограничивающих объем прилагаемой формулы изобретения.
[0024] На ФИГ. 1 показана обобщенная конфигурация варианта осуществления предшествующего уровня техники, в котором текущее положение транспортного средства 100 определяется посредством камеры 10 переднего вида с углом раскрыва обычно в пределах от 25° до 150°, которая устанавливается в центральном положении впереди транспортного средства. Транспортное средство 100 может быть одиночным грузовым автомобилем или автопоездом из грузового автомобиля и прицепа. Камера может быть либо трехфокусной камерой, что по существу расширяет обзор камеры в поперечном и прямом направлении, стереокамерой с преимуществом мгновенного измерения глубины или монокамерой, что используется для современных систем содействия в удержании полосы движения. Камера обычно устанавливается позади лобового стекла транспортного средства и соединяется с контроллером рулевого управления, соединенного с системой рулевого управления транспортного средства 100. Для реализации автоколонны выполняют управление транспортными средствами в продольном и поперечном направлениях посредством контроллера интервала движения и контроллера управления в поперечном направлении, который воплощен в контроллере рулевого управления. В конфигурации предшествующего уровня техники главная цель управления в поперечном направлении в автоколоннах заключается в следовании за ведущим транспортным средством. В этом отношении нежелательно, чтобы по автоколонне распространялись ошибки рулевого управления (недоезд или выезд) от переднего транспортного средства. Дополнительно, при управлении движением по непрямым полосам движения (движение на повороте) задняя часть прицепа 50 ведущего транспортного средства будет смещаться от положения его тягача в полосе движения, приводя в результате к увеличенной величине срезания угла, при условии того, что данное положение прицепа является единственно возможным источником информации для рулевого управления следующим(и) транспортным(и) средством(ами). Иллюстративное представление распространение ошибки рулевого управления в конфигурации предшествующего уровня техники указано на приложенном к ней x-y графике на ФИГ. 1.
[0025] Соответственно, регулирование движения моторного транспортного средства может основываться на данных изображения, полученных от камеры 10, при автономном управлении движением моторного транспортного средства при формировании автоколонны, следующей за ведущим транспортным средством. Однако вследствие ограниченных пределов вперед и в стороны дистанция следования относительно ведущего транспортного средства довольно большая, обычно не ближе 10 метров и обычно более 15 метров. Данный способ обеспечивает управление интервалом движения, производительность которого может быть повышена за счет слияния сигнала камеры с сигналами, поступающими от дополнительного радара переднего обзора и/или системы лазерного сканнера. Также, сообщение между транспортными средствами сигналов ускорения и замедления от впередиидущего к последующему транспортному средству может играть важную роль в этом отношении. Однако управление в поперечном направлении страдает от распространения ошибок рулевого управления от впередиидущего(их) транспортного(ых) средства (средств) далее по автоколонне.
[0026] На ФИГ. 2 показана конфигурация с датчиком согласно одному варианту осуществления настоящего изобретения. В данном варианте осуществления обеспечен датчик стороны полосы движения, который может быть, например, камерой или выполнен на лазерной основе. Следовательно, управление движением моторного транспортного средства 100 при формировании автоколонны, следующей за ведущим транспортным средством 100' осуществляется посредством контроллера рулевого управления, соединенного с системой рулевого управления транспортного средства (не изображена). Способ содержит определение текущего положения транспортного средства относительно стороны 250 полосы движения посредством датчика 20 стороны полосы движения, установленного в первом местоположении на передней стороне транспортного средства, предпочтительно на боковом зеркале транспортного средства. Еще один датчик 20' стороны полосы движения установлен во втором местоположении на передней стороны транспортного средства, находящемся напротив первого местоположения на передней стороне транспортного средства, относительно продольной оси транспортного средства. Датчики 20, 20' стороны полосы движения предоставляют опорное значение дистанции в поперечном направлении в контроллер рулевого управления относительно наблюдаемой первой и/или второй стороны полосы движения. В данной конфигурации, камеры 20, 20' переднего обзора образуют двойной базис для камеры, больший ширины транспортного средства, то есть первый и второй датчики пространственно разнесены на расстояние, равное или больше ширины транспортного средства.
[0027] В изображенном варианте осуществления датчики сторон полосы движения могут быть дополнительно выполнены с возможностью обеспечения изображения ведущего транспортного средства, расположенного перед транспортным средством. Контроллер рулевого управления может тем самым управлять системой рулевого управления для осуществления рулевого управления транспортным средством согласно опорному значению, полученному из указанного изображения. Один и тот же датчик может таким образом также использоваться для определения положения прицепа впереди идущего транспортного средства в автоколонне кроме своего собственного положения в поперечном направлении по отношению к полосам движения, что является критическим входным параметром для стабильного управления с обратной связью собственного движения. Для продольного управления предложенный способ имеет преимущество в обеспечении вида со стереокамеры с большим базисом (дистанцией между камерами), приводя в результате по существу к более точному восприятию глубины и следовательно более точному измерению дистанции для впередиидущего прицепа по сравнению с современными стереоскопическими видеокамерами. Следует заметить, что в настоящее время одномодульные стереокамеры обычно применяют базисное расстояние не более 10 см в ширину между фактическими объективами камер. С данной новой предложенной конфигурацией из двух по отдельности литых монокамер, расположенных на левой и правой стороне транспортного средства, длина базиса обычно максимизируется приблизительно до 250 см, что означает коэффициент увеличения точности измерения по глубине в двадцать пять раз, что приводит почти к сантиметровой точности измерений на дистанции переднего обзора до 300 м, но также и до 5 метров или даже меньше вблизи. Датчик 20 стороны полосы движения может таким образом быть выполнен с возможностью формирования изображения опорной точки Р сзади прицепа ведущего транспортного средства 100', расположенного на дистанции впереди. Эта дистанция обычно намного меньше дистанции интервала движения, достигаемой в варианте осуществления на ФИГ. 1, то есть менее 15 м, обычно приблизительно от 5 до 10 метров. По такому принципу взаимная дистанция транспортного средства или интервал движения могут быть рассчитаны относительно ведущего транспортного средства в стереоизображении, полученном от указанных противоположных датчиков 20, 20' сторон полосы движения. Преимущество состоит в том, что из одного и того же изображения может быть осуществлено обнаружение стороны полосы движения и расчет опорной точки, что повышает надежность и уменьшает количество алгоритмических этапов обработки, которые могут обеспечивать время задержки на гарантируемом минимуме, поскольку значения управления для контроллера рулевого управления получаются из одного и того же исходного изображения со всеми вытекающими отсюда преимуществами, заключающимися в том, что это продолжает уменьшать время задержки системы, критическое для надежного и безопасного осуществления формирования автоколонны. Таким образом, возможно одновременное измерение относительного положения текущей полосы движения относительно самого транспортного средства, а также относительное положение и курсовое направление впередиидущего прицепа относительно данной полосы движения. Преимущественно входные сигналы от камеры подаются в контроллер рулевого управления для обеспечения управления транспортным средством 100 в поперечном направлении на основании функции демпфирования, дополнительно объясняемой на ФИГ. 4, для управления дистанцией транспортного средства в поперечном направлении до обнаруженных сторон полосы движения. Посредством использования одновременных измерений из стереоизображений, полученных от указанных противоположных датчиков сторон полосы движения, реагирование транспортного средства в течение смены полосы движения может быть демпфировано на основании положение полосы движения, что предотвращает выезд следующим транспортным средством в автоколонне из желаемого положения на новой полосе движения, которое могло возникнуть при простом следовании за впередиидущим транспортным средством. Данный эффект известен в качестве «распространения ошибки рулевого управления» и является цепной реакцией, которая вызывает неустойчивую (в колонне) ударную волну в поперечном направлении далее по автоколонне, которая обуславливает покидание последним транспортным средством в автоколонне в поперечном направлении доступного свободного пространства дорожного плотна и даже может привести к столкновению с другими обгоняемыми (обгоняющими) или встречными транспортными средствами на полосах движения рядом с полосой движения формирования автоколонны.
[0028] Кроме того, поскольку датчик полосы движения установлен за пределами ширины транспортного средства, то по меньшей мере одно из устройств всегда способно измерять относительное положение, относительное курсовое направление и радиус кривизны текущей полосы движения. Это содействует стабилизации управления рулевым управлением, использованию окружающего мира (текущей полосы движения) для исправления ошибок рулевого управления ведущего транспортного средства и предотвращению позиционного недоезда/выезда во время установившегося состояния движения на повороте.
[0029] Датчики 20, 20' стороны полосы движения с ФИГ. 2 имеют в качестве дополнительного преимущества то, что стороны полосы движения, расположенные слева и справа, и соответствующая ориентация от ведущего транспортного средства впереди относительно опорных точек Р и или очередь видимы всегда. Точка Q является виртуальной точкой, расположенной на дороге, обычно находящейся в диапазоне между 10 м и 30 м (точное значение является настраиваемым параметром в контроллере рулевого управления, чтобы влиять на принятие компромиссных решений между демпфированием рыскания и быстротой поворачивания при прохождении крутых поворотов) впереди следующего транспортного средства и может быть расположена под прицепом впередиидущего транспортного средства или даже перед впередиидущим транспортным средством. Посредством использования виртуальной точки Q управление при изгибе дороги может таким образом быть оптимизировано, стремясь к устойчивому, но быстрому поведению транспортного средства при движении рыскания посредством обнаружения или вычисления дополнительной дистанции в поперечном направлении от наблюдаемой легко видимой разметки сторон полосы движения, слева и справа от ведущего транспортного средства относительно Q. Эта дополнительная дистанция спереди следующего транспортного средства в поперечном направлении относительно полосы движения или дорожной боковой разметки может быть подана обратно в контроллер 400 управления в поперечном направлении (указанный посредством демпфера на ФИГ. 4А). Следует отметить, что такие датчики имеют сенсорное аппаратное обеспечение, которое известно по сути и в данном документе обозначено в качестве «датчиков стороны полосы движения», чтобы указать на их функцию обнаружения стороны полосы движения в наборе данных, который может быть предоставлен от камеры либо двухмерного или трехмерного сканнера другого датчика, подходящего для настоящей цели. Сканнер имеет предпочтительно лазерный тип сканирования, но может также быть выполнен посредством различных средств, например, акустических, или посредством камеры, оборудованной программным обеспечением распознавания объектов. Лазерный сканнер обычно обладает разрешением менее 10 см, или даже менее 5 см, что является важным преимуществом для точного формирования автоколонны грузового автомобиля, в частности прицепа 50.
[0030] В одном варианте осуществления, данные изображения могут быть предоставлены от камеры или в качестве данных сканирования от двухмерного или трехмерного сканнеров, образованные наборами углов отражения и соответствующих расстояний отражения, обнаруженных указанными сканнерами. Данные сканирования, обозначающие набор лазерных отражений (двухмерные или трехмерные угол и расстояния отражения), могут анализироваться для определения по меньшей мере опорной точи ведущего прицепа. Контроллер рулевого управления может быть воплощен в программном обеспечении и/или аппаратном обеспечении и может быть бортовым или внебортовым у грузового автомобиля. Он вычисляет параметры рулевого управления транспортным средством и параметры управления движением транспортного средства, необходимые для осуществления рулевого управления и управления движением транспортного средства исходя из инструкций контроллера рулевого управления, то есть согласно пути, который поддерживает опорную точку по существу постоянной относительно транспортного средства 100'. С этой целью опорная точка Р в конце прицепа грузового автомобиля является наиболее подходящей. Однако, в случае (динамических) колебаний в поперечном направлении, относящихся к вилянию концевой части при сменах полосы движения, опорная точка Q, виртуальная точка, наложенная на дорогу, главным образом используется для вычисления необходимых стабилизирующих прохождение изгиба дороги демпфирующих сил в дополнение к основной стратегии управления следованием за транспортным средством.
[0031] Кроме того, в качестве необязательной возможности, опорная точка может быть рассчитана или оценена, например, посредством фильтрования по типу Кальмана, от других датчиков, например, в зонах, где сканнер не может сканировать. Например, опорное положение может быть дополнительно измерено традиционным средством, например, бортовыми датчиками парковки, кодерами ABS и ускорителями. Эти дополнительные датчики могут также использоваться для оптимизации взаимодействия с водителем; например, посредством сглаживания действий ускорения или рулевого управления согласно заданным ограничениям.
[0032] Для обычного прямоугольного прицепа датчик может видеть либо длинную сторону, либо короткую сторону, либо и длинную и короткую стороны прицепа. Когда две стороны видимы, то нужно различать, находится ли длинная сторона слева или справа. Это может быть сделано посредством отслеживания линейного участка по кадрам и вычисления для обеих сторон самого длинного линейного участка на основании видимых линий и полученной ориентации прицепа. Опорная точка Р может впоследствии быть получена посредством сопоставления этих ортогональных направлений со сценарием видимости прицепа; при этом один из таких сценариев выбирается в качестве оптимального сценария для определения опорной точки.
[0033] На ФИГ. 3 показан схематический вид конфигурации для контроллера рулевого управления, в котором прогнозируемая точка Q вычисляется на дистанции впереди, превышающей взаимную дистанцию транспортного средства относительно ведущего транспортного средства, при этом контроллер рулевого управления осуществляет управление системой рулевого управления на основании функции демпфирования, которая управляет дистанцией в поперечном направлении между прогнозируемой точкой Q и стороной 250' полосы движения, которая в данном примере является криволинейной.
[0034] Установка датчиков сторон полосы движения в первом местоположении на передней стороне транспортного средства, предпочтительно на боковом зеркале транспортного средства, обеспечивает преимущество в постоянном обзоре, а также и при изгибающихся полосах движения, по меньшей мере на одной стороне разметок сторон полосы движения. Прогнозируемая точка Q, которая рассчитывается виртуально посередине ведущего прицепа, используется для минимизации ошибки управления в поперечном направлении при изгибе дороги, в дополнение к обнаружению стороны полосы движения.
[0035] Посредством такой концепции демпфирования изгиба дороги, в которой управление системой рулевого управления осуществляется на основании функции демпфирования, которая управляет дистанцией в поперечном направлении между опорной точкой Q и стороной полосы движения, могут быть предотвращены заключающиеся в недоезде и выезде ошибки рулевого управления, как визуализировано на ФИГ. 4А. Предложенная концепция восприятия обеспечивает возможность одновременного измерения относительного положения относительно текущей полосы движения применительно к самому транспортному средству, а также относительного положения и курсового направления впередиидущего прицепа применительно к данной полосе движения. Посредством использования этих одновременных измерений реакция транспортного средства в течение смены полосы движения может демпфироваться на основании положения полосы движения, предотвращая выезд следующими транспортными средствами в автоколонне из желаемого положения на новой полосе движения, что могло происходить при простом следовании за впередиидущим транспортным средством. В случае, когда датчики сторон полосы движения выполнены с возможностью обеспечения изображения ведущего транспортного средства, расположенного перед транспортным средством, контроллер рулевого управления может управлять системой рулевого управления для осуществления рулевого управления транспортным средством согласно опорному значению, полученному из указанного изображения. Это может быть осуществлено посредством контура 450 управления с обратной связью (пропорциональной дифференциальной обратной связью или действием PD), как это визуализировано с помощью пружинных демпферных элементов 450, соединяющих в поперечном направлении следующие транспортные средства в автоколонне. На графике x-y показано, что система демпферного управления при изгибе дороги, схематично представленная средством 400 демпферного управления дистанцией транспортного средства в поперечном направлении, способна сглаживать шаг у дистанции в поперечном направлении в пределах дистанций продольного перемещения на скорости управления движением за секунды. Кроме того, поскольку датчик полосы движения установлен за пределами допустимой ширины транспортного средства, то всегда становится возможным измерять по меньшей мере одним из указанных устройств относительное положение, относительное курсовое направление и радиус кривизны текущей полосы движения. Это содействует стабилизации управления рулевым управлением, использованию окружающего мира (текущей полосы движения) для исправления ошибок рулевого управления ведущего транспортного средства и предотвращению позиционного недоезда во время установившегося состояния движения на повороте.
[0036] Схематичная масштабируемая весовая функция для контура обратной/прямой связи изображена для визуализации функции демпфирования, как показано на ФИГ. 4В. Данная весовая функция может управлять множеством задач для управления в поперечном направлении в автоколоннах, при этом контроллер рулевого управления принимает решение о выборе при непрямых курсах рулевого управления между дистанцией в поперечном направлении и опорным значением. Первая задача может состоять в том, чтобы следование за транспортным средством оставалось в пределах одной и той же полосы движения что и ведущее транспортное средство на основании обнаружения стороны полосы движения. Вторая задача может состоять в том, чтобы следующее транспортное средство следовало за ведущим транспортным средством, например, к смежной полосе движения, когда выполняется смена полосы движения, на основании вычисленной прогнозируемой точки. Весовая функция разработана для принятия решения о выборе и гладкого балансирования между различными вариантами использования.
[0037] ДОПОЛНИТЕЛЬНО ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
[0038] На ФИГ. 5 показан дополнительный примерный вариант осуществления, в котором датчик стороны полосы движения встроен в качестве камеры переднего обзора в расположенное на передней стороне зеркало.
[0039] Дополнительно расположенное на передней стороне зеркало может дополнительно содержать первую камеру, формирующую изображение боковой зоны А1, простирающейся назад и вдоль транспортного средства; вторую камеру, формирующую изображение боковой зоны А2, простирающейся вбок от транспортного средства; третью камеру, формирующую изображение боковой зоны A3 вблизи транспортного средства, обычно являющуюся камерой обнаружения слепой зоны в виде так называемой линзы камеры «рыбий глаз» для обнаружения уязвимых пользователей дороги, таких как пешеходы и велосипедисты сбоку поблизости от грузового автомобиля.
[0040] Эти три камеры, покрывающие зоны A1, А2 и A3 видимости, могут считаться характерными современными системными решениями, в которых традиционные внешние зеркала заднего вида (основанные на принципе «отражения» объекта по прямой линии обзора для водителя) завершают свое существование или заменяются на задние камеры и/или камеры заднего обзора с целью повышения экономии топлива посредством эффективного уменьшения лобовой поверхности грузового автомобиля и таким образом уменьшения силы аэродинамического сопротивления. Просматриваемые видеопотоки от этих камер комбинируются вместе и показываются водителю через устройства отображения (или мониторы), стратегически помещаемых позади передних стоек кабины и предоставляющих дополнительную информацию о слепой зоне интуитивным образом. После того, как эти системы с камерами оказываются на своем месте, может осуществляться подача информации в такие специализированные функциональные приложения ADAS, как «Помощь в поворотах по городу» (избегание наезда на уязвимых пользователей дороги при повороте), «Пассивная и активная помощь при смене полосы движения» (которая обнаруживает дорожный трафик, например, пассажирские автомобили, либо встречные, либо обгоняемые, на полосах движения слева и справа от автопоезда из грузового автомобиля и прицепа, и предупреждает и даже вмешивается при попытке водителем съехать на обочину, и авария предотвращается). Но также и функции «Предупреждения столкновений. при движении задним ходом» и Автоматической езды задним ходом с прицепом могут захотеть использовать ценные сигналы от камер.
[0041] Объединение этих современных так называемых «зеркал-камер» с камерой 20 переднего обзора (с зоной А4 изображения) согласно объему настоящего изобретения (для ссылки см. также левую и правую камеры со ссылочными позициями 20 и 20' на ФИГ. 3) обеспечивает значительно экономящую на затратах и весе конструкцию и предоставляет возможность преимущественной интеграции системы, как только указанные функции ADAS объединены в одну систему и совмещены в так называемом «центральном контроллере области ADAS» (не указан на ФИГ. 5). Все необходимые датчики-камеры и их соответствующие полупроводниковые компоненты и печатные платы могут быть установлены и размещены совместно в одной центральной кронштейной системе с обеих сторон кабины.
[0042] Для законченного выполнения комплекта датчиков-камер приблизительно на 360° (или удовлетворения требованию кругового обзора на 360°), как это необходимо для (полу-)автономного управления движением согласно уровням 3, 4 и 5 J3016 Международного стандарта SAE автоматизации, может потребоваться захотеть установить один дополнительный датчик с зоной А5 обзора, обращенной более или менее вниз к ближайшей передней области и в противоположную сторону от транспортного средства, эффективно обнаруживая объекты (такие как малолитражные автомобили, велосипедисты и пешеходы), которые располагаются в оставшейся слепой зоне в ближайшей передней области транспортного средства и которые находятся вне областей видимостей, которые охватываются датчиками 20 и 20' сторон полос движения, которые попадают в объем настоящего изобретения.
[0043] Изображение зоны А4 формируется датчиком 20 стороны полосы движения. При наличии вышеописанных дополнительных камер для соответствующих зон Al, А2, A3 и А5 изображений управление формированием автоколонны может быть дополнительно улучшено с помощью принятия решения о выборе на основании изображений от этих дополнительных камер. В одном варианте осуществления указанная весовая функция принимает решение о выборе уникального управления стороной полосы движения, когда транспортное средство определено в боковой зоне А1 формирующей изображение первой камеры, простирающейся вдоль транспортного средства. В другом варианте осуществления контроллер интервала движения снабжен функцией принятия решения о выборе взаимной дистанции, которая управляет взаимной дистанцией на основании обнаруженного сокращения транспортным средством взаимной дистанции до ведущего транспортного средства. Такое принятие решения о выборе может включать управление рулевым управлением.
[0044] Дополнительные интегрированные решения по экономии на затратах и весе, которые, в частности, относятся к варианту использования формирования автоколонны рассматриваются в сочетании с вышеописанными пятью датчиками-камерами согласно описанию ФИГ. 5 (но не изображены специально по причинам ясности) с блоками GPS, системой связи между транспортными средствами на основе Wi-Fi, средством резервной связи, подобным системе светодиодной связи прямой видимости в случае, если связь Wi-Fi не функционирует (в частности касаемо выполнения требований техники безопасности 3-го, 4-го и 5-го уровня SAE при формировании автоколонны) и дополнительном средстве беспроводной мобильной связи, как 4G и 5G, для того, чтобы обеспечивать обновления функционального программного обеспечения «по воздуху» и/или соединение с другими «службами в облаке», например, службы фактической информации о трафике и конкретных логистических поставщиков. Также интегрирование радарных схем (малой, средней и/или большой дальности), покрывающих одну или более из зон А1-А5 обзора считается полезными возможностями объединения экономии на затратах и весе в дополнение к этим зеркалам-камерам. Сигналы, поступающие от этих малых радарных систем, подлежат объединению с сигналами от камеры для повышения надежности и точности обнаруженных объектов. В одном варианте осуществления радарный датчик может быть установлен в некотором местоположении на боковой стороне транспортного средства, выполнен с возможностью обнаружения проходящего мимо транспортного средства в полосе движения, соседней с транспортным средством. Контроллер рулевого управления может таким образом руководствоваться контроллером управления в поперечном направлении, опорным значением и сигналом датчика от радарного датчика. Например, радарный датчик может обнаруживать быстро двигающееся транспортное средство, приближающееся сзади по соседней полосе движения. Все эти сенсорные системы и системы связи могут быть совместно размещены в компактном корпусе и могут обеспечивать сигнальные линии, которые, вследствие встроенного характера датчиков в едином интегральном устройстве бокового зеркала, являются также подходящими для высокоскоростного (свыше 10 Гб/с) оптоволоконного соединения с центральной шиной связи. Устройство бокового зеркала предпочтительно устанавливается на неподвижной части кабины, на боковой ее стороне, что имеет преимущество в том, что линиям соединения устройства зеркала не нужно быть встроенными в подвижные части, в частности, в двери кабины. В другом возможном варианте графическая обработка сигналов от сигнальных линий устройств зеркал может быть обеспечена «на месте», то есть в самом устройстве или в соответствующей части разъема в непосредственной близости от устройства камеры, для избегания длинных кабелей потоковой передачи HD сигналов.
[0045] В еще одном возможном варианте установка устройства бокового зеркала снабженным средством защиты от ударов, например, в виде стального кабеля и т.д., чтобы предотвращать отрывание устройства от кабины в случае удара или вандализма. Это защитное средство может быть электронно связано со средством обработки сигналов для предупреждения о неправильном функционировании системы.
Узел воздушного дефлектора
Корпус трансмиссии и узел ведущей оси, содержащий указанный корпус
Управление декомпрессионным тормозом
Система и способ обнаружения и нейтрализации разноса дизельного двигателя
Система помощи при регулировке зеркал для грузовых автомобилей
Способ автоматического подведения к погрузочно-разгрузочной площадке для применения в грузовых автомобилях большой грузоподъемности
Способ и система оповещения водителя грузового автомобиля
Способ автоматического подведения к погрузочно-разгрузочной площадке для применения в грузовых автомобилях большой грузоподъемности

