Результат интеллектуальной деятельности: УСТРОЙСТВО ПОДАЧИ РЫБЫ И СПОСОБ ПОДАЧИ
Вид РИД
Изобретение
Предложенное изобретение относится к устройству подачи рыбы, выполненному и предназначенному для подачи рыбы к нескольким средствам обработки рыбы. Предложенное изобретение также относится к способу подачи рыбы к нескольким обрабатывающим рыбу машинам.
Такие устройства и способы используются в рыбообрабатывающей промышленности. В частности, при автоматизированной обработке рыбы необходимо обеспечивать подачу рыбы к соответствующим средствам обработки рыбы автоматически.
В документе WO 03/013262 приведено описание, например, способа автоматизированной обработки рыбы и установки для предварительной подготовки и обработки рыбы. Рыбу регулируемым способом автоматически подают к обрабатывающим машинам, в частности, к машинам для автоматизированного потрошения, посредством соответствующих загрузочных устройств. Используемое загрузочное устройство является подающим конвейером, на котором рыбу транспортируют в направлении продольного размера рыбы. Посредством управляемых отклоняющих средств рыбу подают к соответствующим обрабатывающим машинам, в которых отклоняющее средство толкает каждую рыбу с конвейера в желоб, проходящий к соответствующей обрабатывающей машине.
Известные устройства и способы подачи рыбы имеют ряд недостатков. Во-первых, когда рыбу транспортируют в направлении ее продольного размера, то есть в направлении вперед головой или вперед хвостом, как это известно из предшествующего уровня техники, то максимальное количество рыбы, которое может транспортироваться в единицу времени, имеет верхний предел. Рыбу обычно транспортируют в продольном направлении посредством конвейерных лент, на которых рыбу транспортируют, когда она лежит на боку. Для того чтобы при загрузке на такие конвейерные ленты избежать неконтролируемого выскальзывания рыбы существует верхний предел максимальной скорости транспортирования. Другой недостаток заключается в том, что каждая рыба на конвейерной ленте занимает часть конвейера в направлении транспортирования, соответствующую по меньшей мере длине ее туши, что также ограничивает максимальную скорость транспортирования.
Другой недостаток заключается в том, что в связи с существующим в настоящее время требуемым высоким объемом выпуска рыбы в единицу времени, уже невозможно получить требуемые скорости транспортирования при ручной укладке рыбы операторами на такую конвейерную ленту.
Кроме того, существует необходимость в подаче рыбы к расположенному по центру оборудованию для проведения дополнительной обработки рыбы и ее автоматизированного распределения к нескольким средствам обработки рыбы по возможности с высоким объемом выпуска.
Соответственно, целью настоящего изобретения является предложение устройства подачи рыбы, обеспечивающего оптимальную подачу рыбы к нескольким обрабатывающим устройствам с одновременным поддержанием по возможности высокой скорости транспортирования. Целью настоящего изобретения дополнительно является предложение соответствующего способа.
Данная цель достигается посредством вышеупомянутого устройства подачи рыбы, содержащего поперечный конвейер, выполненный с возможностью транспортирования рыбы поперек ориентации голова-хвост в поперечном направлении транспортирования, при этом поперечный конвейер содержит множество приемников, каждый из которых выполнен с возможностью индивидуального удержания одной рыбы, причем поперечный конвейер также содержит управляемый приводной блок, при этом устройство подачи рыбы дополнительно содержит по меньшей мере одно загрузочное устройство, выполненное с возможностью подачи рыбы в приемники поперечного конвейера, и множество передаточных устройств, выполненных с возможностью выборочной передачи рыбы от поперечного конвейера на соответствующий продольный конвейер, расположенный выше по технологическому потоку от соответствующего обрабатывающего рыбу устройства, причем продольные конвейеры предназначены для транспортирования рыбы в ориентации голова-хвост к обрабатывающим рыбу машинам, и устройство управления, предназначенное для управления упомянутым по меньшей мере одним загрузочным устройством, передаточными устройствами и скоростью транспортирования поперечного конвейера на основании по меньшей мере одних заданных правил распределения. При этом обеспечена возможность оптимального распределения рыбы к нескольким обрабатывающим рыбу устройствам с высокой скоростью транспортирования. Во-первых, преимущество поперечного конвейера заключается в плотной укладке рыбы и, соответственно, в возможности транспортирования большего количества рыбы в расчете на часть длины. Во-вторых, поперечный конвейер допускает, соответственно, высокие скорости транспортирования, так как рыба удерживается по отдельности и надежно размещена по центру приемников, а также пространство, необходимое в направлении транспортирования, по существу ограничивается шириной рыбы.
Другое преимущество заключается в том, что загрузка рыбы в приемники посредством загрузочных устройств по существу является автоматизированной. Следовательно, загрузочные устройства предназначены и выполнены с возможностью точной автоматической загрузки в приемники так, что даже при высоких скоростях транспортирования поперечного конвейера всегда обеспечивается точная загрузка в приемники.
Вследствие управления упомянутым по меньшей мере одним загрузочным устройством, передаточным устройством и скоростью транспортирования поперечного конвейера с использованием специально выполненного устройства управления загрузка рыбы в последующие обрабатывающие рыбу устройства оптимизирована по всем аспектам. В соответствии с заданными правилами распределения полная скорость транспортирования поперечного конвейера определяется доступной приемной способностью соответствующих обрабатывающих рыбу устройств. В случае выхода из строя одного из обрабатывающих рыбу устройств или ухудшения его эксплуатационных показателей соответствующее передаточное устройство с помощью устройства управления на основании заданных правил распределения обеспечивает передачу меньшего количества рыбы на соответствующий продольный конвейер. До той степени, в которой доступна приемная способность других обрабатывающих рыбу устройств, рыба, не переданная в вышедшие из строя машины, передается на другой продольный конвейер передаточными устройствами и/или при этом соответственно снижается скорость поперечного конвейера.
Особенно преимущественным является то, что посредством предложенного устройства подачи рыбы и предложенного способа вся установка, содержащая устройство подачи рыбы и обрабатывающие рыбу устройства имеют большую гибкость в отношении ее физической компоновки. Таким образом, расстояния между отдельными обрабатывающими рыбу устройствами могут быть неравными, поскольку передача рыбы может быть отрегулирована с учетом данных условий в соответствии с заданными правилам распределения.
Подходящий вариант выполнения изобретения характеризуется тем, что указанное по меньшей мере одно загрузочное устройство содержит по меньшей мере один синхронизирующий клапанный элемент, выполненный с возможностью управляемого перемещения и предназначенный для управления, с помощью управляющего сигнала синхронизации, генерируемого устройством управления, загрузкой рыбы в один из приемников в предварительно выбранное время выпуска. Таким образом, каждую рыбу передают в приемник с прохождением через синхронизирующий клапанный элемент в точное время. Поскольку устройство управления предназначено и выполнено с возможностью управления синхронизирующим клапанным элементом, то обеспечивается возможность подачи приемников точно и с соответствующими высокими скоростями транспортирования поперечного конвейера.
Другое преимущество заключается в том, что, при выходе из строя одного из обрабатывающих рыбу устройств во время работы, обеспечена возможность предотвращения подачи в приемники, из которых при нормальной работе рыба должна быть передана к указанной машине с использованием соответствующего передаточного устройства. Таким образом, работа установки может продолжаться без перерыва даже при выходе из строя отдельных обрабатывающих рыбу машин, исключая, в значительной степени, необходимость отключения всей установки.
Предпочтительный вариант выполнения изобретения характеризуется тем, что загрузочное устройство содержит направляющую плоскость, расположенную под наклоном так, что под действием силы тяжести рыба автоматически ложится на первый участок удержания, расположенный перед синхронизирующим клапанным элементом, когда он находится в закрытом положении, и автоматически перемещается в направлении поперечного конвейера в соответствующий приемник, когда указанный синхронизирующий клапанный элемент находится в открытом положении. Такое решение обеспечивает циклическую и управляемую передачу рыбы в приемники. Таким образом, рыба сначала останавливается на участке удержания. Из этого положения покоя рыбу затем передают в соответствующий приемник с помощью синхронизирующего клапанного элемента.
В соответствии с предпочтительным вариантом выполнения загрузочное устройство содержит накопительный клапанный элемент, выполненный с возможностью управляемого перемещения, причем накопительный клапанный элемент расположен выше по технологическому потоку от синхронизирующего клапанного элемента с формированием, тем самым, каскада клапанных элементов. Другими словами, каждое из загрузочных устройств выполнено в виде ступенчатого каскада. Такое решение обеспечивает, с одной стороны, отсутствие неконтролируемого выскальзывания рыбы вниз с направляющей плоскости, то есть без первой остановки, если и синхронизирующий клапанный элемент и накопительный клапанный элемент находятся в открытом положении. С другой стороны, это обеспечивает большее удобство для оператора, подающего рыбу в загрузочное устройство. Поскольку вышеупомянутый каскад клапанных элементов гарантирует короткую остановку рыбы для дальнейшей передачи рыбы в приемники из этого местоположения остановки, то есть из заданных начальных условий, то оператору необходимо просто убедиться в том, что рыба своевременно расположена на участке перед накопительным клапанным элементом. Как изложено выше, дальнейшая загрузка в приемники происходит автоматически с помощью устройства управления и не требует дополнительного вмешательства оператора.
Другой подходящий вариант выполнения изобретения характеризуется тем, что устройство управления выполнено с возможностью управления каскадом клапанных элементов так, что когда синхронизирующий клапанный элемент перемещается из открытого положения в закрытое положение, накопительный клапанный элемент перемещается из закрытого положения в открытое положение и наоборот. Таким образом, производительность загрузочного устройства, то есть количество рыбы, которое может быть подано соответствующим загрузочным устройством, дополнительно повышается. Соответственно, время, необходимое для перемещения синхронизирующего клапанного элемента и накопительного клапанного элемента, а также инерция рыбы при ее ускорении на направляющей плоскости под действием силы тяжести учитываются устройством управления так, что, например, накопительный клапанный элемент высвобождает рыбу даже до достижения синхронизирующим клапанным элементом закрытого положения.
В соответствии с предпочтительным вариантом выполнения на участке накопительного клапанного элемента расположен датчик для обнаружения рыбы, предназначенный и выполненный с возможностью обнаружения рыбы на участке ожидания перед накопительным клапанным элементом и сообщения об этом в устройство управления. С помощью указанного датчика устройство управления автоматически определяет наличие рыбы перед накопительным клапанным средством. В частности, устройство управления выполнено с возможностью проведения указанной рыбы непосредственно, при наличии возможности, на участок удержания, расположенный перед синхронизирующим клапанным элементом, как только участок удержания, расположенный перед синхронизирующим клапанным элементом, освободится от рыбы.
Другой подходящий вариант выполнения изобретения характеризуется тем, что несколько загрузочных устройств расположено друг за другом и со смещением относительно друг друга в поперечном направлении транспортирования по меньшей мере на ширину приемника. Такое решение обеспечивает преимущество, заключающееся в увеличении количества рыбы, которое может быть передано в приемники в единицу времени и, соответственно, в увеличении полного объема выпуска устройства подачи в соответствии с предложенным изобретением. Другое преимущество заключается в том, что вследствие расположения загрузочных устройств со смещением подача в приемники может осуществляться без перерыва, то есть приемники могут снабжаться без оставления пустым какого-либо приемника. При таком способе пропускная способность поперечного конвейера используется оптимально. Поперечный конвейер, в частности, конструктивно выполнен в виде циркуляционного конвейера.
Подходящий вариант выполнения изобретения характеризуется тем, что каждый из приемников выполнен с возможностью поворота вокруг поперечной оси. Приемники поперечного конвейера выполнены с возможностью поворота так, что при доставке рыбы в соответствующие передаточные устройства они могут быть наклонены для передачи рыбы на соответствующий продольный конвейер.
Предпочтительный вариант выполнения изобретения характеризуется тем, что каждое из передаточных устройств содержит извлекающий сбрасыватель, который выполнен с возможностью и предназначен для поворота соответствующего приемника из положения транспортирования рыбы в положение извлечения рыбы с использованием сигнала управления передачей, генерируемого устройством управления. Следовательно, в положении транспортирования рыбы приемники, предпочтительно, расположены горизонтально с образованием соответствующей плоскости для транспортирования отдельной рыбы, лежащей в приемниках, в направлении транспортирования. В положении извлечения рыбы приемники наклонены так, что рыба выскальзывает под действием силы тяжести под транспортирующую плоскость, сформированную приемниками, и передается на соответствующий продольный конвейер. Особенно предпочтительно извлекающий сбрасыватель содержит поворотную направляющую, выполненную с возможностью управления с помощью сигнала управления передачей.
Другой подходящий вариант выполнения изобретения характеризуется тем, что каждое из передаточных устройств содержит направляющие средства на участке извлекающего сбрасывателя, причем указанные направляющие средства выполнены с возможностью передачи рыбы из приемников в положении извлечения рыбы на соответствующий продольный конвейер под действием силы тяжести. Направляющие средства обеспечивают управляемую передачу рыбы на соответствующий продольный конвейер так, что передача рыбы происходит направленно и без повреждения.
В соответствии с другим предпочтительным вариантом выполнения каждое из передаточных устройств содержит датчик заполнения рыбой, выполненный с возможностью сообщения устройству управления о заполнении соответствующего продольного конвейера рыбой или о том, что конвейер свободен на участке передаточного устройства. Датчики заполнения рыбой выполнены с возможностью сообщения устройству управления о возможности дальнейшей передачи рыбы на соответствующий продольный конвейер у соответствующих передаточных устройств. Если, например, одно из обрабатывающих рыбу устройств выходит из строя, то соответствующий продольный конвейер может временно не принимать рыбу. Это состояние надежно выявляют датчики заполнения рыбой, и учитывает устройство управления при передаче рыбы передаточными устройствам на основании заданных правил распределения.
Другой подходящий вариант выполнения изобретения характеризуется тем, что устройство управления выполнено с возможностью назначения приемников, подаваемых с рыбой, к соответствующей обрабатывающей рыбу машине на основании заданных правил распределения, и определения правил назначения. Правила распределения включают код распределения, в соответствии с которым рыбу назначают соответствующим обрабатывающим рыбу устройствам. На основании этих правил распределения устройство управления создает правила назначения, в соответствии с которым каждый из заполненных приемников назначают одному из продольных конвейеров или соответствующему обрабатывающему рыбу устройству. Другими словами, каждый приемник изначально назначен одному из обрабатывающих рыбу устройств. Если во время работы изменяется приемная способность отдельных обрабатывающих рыбу устройств, например, вследствие повреждений или других событий, существенных для соответствующей производительности, то устройство управления выполнено с возможностью соответствующего изменения правил распределения и/или правил назначения для продолжения обеспечения оптимальной подачи рыбы к соответствующим обрабатывающим рыбу машинам.
В соответствии с другим предпочтительным вариантом выполнения устройство управления выполнено с возможностью определения положений приемников и определения соответствующего времени выпуска на основании привил назначения и определенных местоположений приемников. Другими словами, устройство управления выполнено с возможностью постоянного текущего контроля положения приемников.
Подходящий вариант выполнения изобретения характеризуется тем, что устройство управления выполнено с возможностью определения соответствующей приемной способности обрабатывающих рыбу машин и/или состояний заполнения передаточных устройств, и на этом основании определения фактической приемной способности каждого обрабатывающего рыбу устройства. Преимущество такого решения заключается в том, что правила распределения и/или правила назначения постоянно оптимально изменяют в зависимости от фактической приемной способности.
В соответствии с другим предпочтительным вариантом выполнения устройство управления содержит блок сравнения, обеспечивающий сравнение фактической приемной способности каждого из обрабатывающих рыбу устройств с заданной номинальной приемной способностью соответствующего обрабатывающего рыбу устройства. При этом, если по меньшей мере одна из фактических приемных способностей опускается ниже соответствующего значения номинальной приемной способности, то правила распределения изменяют так, что соответствующая номинальная приемная способность по меньшей мере временно уменьшается. Таким образом, устройство управления обнаруживает уменьшенный прием отдельными обрабатывающими рыбу устройствами и соответственно обеспечивает регулирование загрузки рыбы на продольные конвейеры.
Другой подходящий вариант выполнения изобретения характеризуется тем, что блок управления дополнительно выполнен с возможностью определения совокупной фактической приемной способности, как суммы фактических приемных способностей обрабатывающих рыбу машин, а также с возможностью управления скоростью транспортирования поперечного конвейера так, что загрузка приемников выполняется без перерыва. Непрерывное заполнение приемников имеет особое преимущество, заключающееся в том, что после остановки поперечного конвейера и/или повторного ускорения поперечного конвейера до исходной скорости транспортирования подача приемников осуществляется без перерыва так, что немедленно обеспечивается максимальная подача.
Цель изобретения также достигается вышеупомянутым способом, включающим следующие этапы: транспортирование рыбы поперек ориентации голова-хвост в поперечном направлении транспортирования посредством множества приемников поперечного конвейера, каждый из которых сформирован с возможностью индивидуального удерживания одной рыбы; загрузку приемников поперечного конвейера с помощью загрузочного устройства; выборочную передачу рыбы посредством передаточных устройств из поперечного конвейера на соответствующие продольные конвейеры, расположенные выше по технологическому потоку от обрабатывающих рыбу машин; транспортирование переданной рыбы в ориентации голова-хвост к обрабатывающим рыбу машинам посредством продольных конвейеров; управление загрузкой приемников и выборочной передачей рыбы на основании по меньшей мере одних правил распределения.
Преимущества предложенного способа уже были объяснены выше в отношении устройства подачи рыбы. Чтобы избежать повторений ссылка будет сделана на преимущества, описанные в настоящем документе, которые соответственно применимы к способу.
Подходящий вариант выполнения изобретения отличается генерированием управляющего сигнала синхронизации с помощью устройства управления и приведением в действие по меньшей мере одного синхронизирующего клапанного элемента загрузочного устройства, выполненного с возможностью управляемого перемещения, и загрузкой рыбы в приемники в предварительно выбранное время выпуска.
Предпочтительный вариант выполнения изобретения отличается тем, что под действием силы тяжести рыба автоматически ложится на первый участок удержания перед синхронизирующим клапанным элементом, когда он находится в закрытом положении, и автоматически перемещается в направлении поперечного конвейера в соответствующий приемник, когда указанный синхронизирующий клапанный элемент находится в открытом положении, при этом рыба скользит вниз по наклонной направляющей плоскости.
В соответствии с другим предпочтительным вариантом выполнения изобретения при загрузке приемников рыба проходит под циклическим контролем через каскад клапанных элементов, образованный синхронизирующим клапанным элементом и накопительным клапанным элементом, расположенным от него выше по технологическому потоку и выполненным с возможностью управляемого перемещения.
Другой подходящий вариант выполнения изобретения характеризуется тем, что каскадом клапанных элементов управляют с помощью устройства управления, так что когда синхронизирующий клапанный элемент находится в открытом положении, накопительный клапанный элемент находится в закрытом положении, или, когда накопительный клапанный элемент находится в открытом положении, синхронизирующий клапанный элемент находится в закрытом положении.
В соответствии с другим предпочтительным вариантом выполнения способ включает обнаружение с помощью датчика заполнения рыбы на участке ожидания перед накопительным клапанным элементом или отсутствия рыбы, и сообщения об обнаруженном состоянии в устройство управления.
Другой подходящий вариант выполнения изобретения характеризуется загрузкой приемников посредством нескольких загрузочных устройств, расположенных друг за другом и со смещением относительно друг друга в поперечном направлении транспортирования по меньшей мере на ширину приемников.
Другой преимущественный вариант выполнения изобретения характеризуется генерированием сигнала управления передачей посредством устройства управления и инициированием поворотного движения приемников из положения транспортирования рыбы в положение извлечения рыбы посредством соответствующего извлекающего сбрасывателя для передачи рыбы из приемника на соответствующий продольный конвейер.
Подходящий вариант выполнения изобретения характеризуется направлением рыбы на соответствующий продольный конвейер под действием силы тяжести на участок извлекающего сбрасывателя с помощью направляющего средства.
Предпочтительный вариант выполнения изобретения характеризуется обнаружением состояния заполнения передаточных устройств посредством датчиков заполнения рыбой и сообщения о том, заполнен ли соответствующий продольный конвейер рыбой или указанный конвейер свободен на участке передаточного устройства, с помощью передачи обнаруженного состояния в устройство управления.
В соответствии с другим предпочтительным вариантом выполнения изобретения поперечный конвейер приводится в действие приводным блоком, выполненным с возможностью управления, при этом скорость транспортирования регулируется устройством управления.
Другой подходящий вариант выполнения изобретения характеризуется назначением приемников, при загрузке в них рыбы, соответствующим обрабатывающих рыбу машинам на основании заданных правил распределения и созданием правил назначения.
Подходящий вариант выполнения изобретения характеризуется определением местоположения приемников и определением соответствующего времени выпуска с помощью правил назначению и определенных местоположений приемников.
В соответствии с другим предпочтительным вариантом выполнения осуществляется текущий контроль приемной способности обрабатывающих рыбу машин и/или состояний заполнения передаточных устройств, и на их основании определение фактической приемной способности каждого обрабатывающего рыбу устройства.
Другой подходящий вариант выполнения изобретения характеризуется сравнением фактической приемной способности каждого обрабатывающего рыбу устройства с заданной номинальной приемной способностью соответствующего обрабатывающего рыбу устройства, при этом, если значение по меньшей мере одной из фактических приемных способностей опускается ниже соответствующего значения номинальной приемной способности, то правила распределения изменяют так, что соответствующая номинальная приемная способность по меньшей мере временно снижается.
Другой подходящий вариант выполнения изобретения характеризуется определением совокупной фактической приемной способности как суммы фактических приемный способностей обрабатывающих рыбу машин и управлением скоростью транспортирования поперечного конвейера так, что загрузка приемников выполняется без перерыва.
Другие предпочтительные и/или подходящие признаки и варианты выполнения изобретения следуют из подпунктов формулы изобретения и подробного описания. Особенно предпочтительные варианты выполнения предложенного изобретения более подробно объяснены со ссылкой на прилагаемые чертежи. Чтобы избежать повторений, способ в соответствии с предложенным изобретением объяснен ниже более подробно вместе с устройством подачи рыбы. На чертежах:
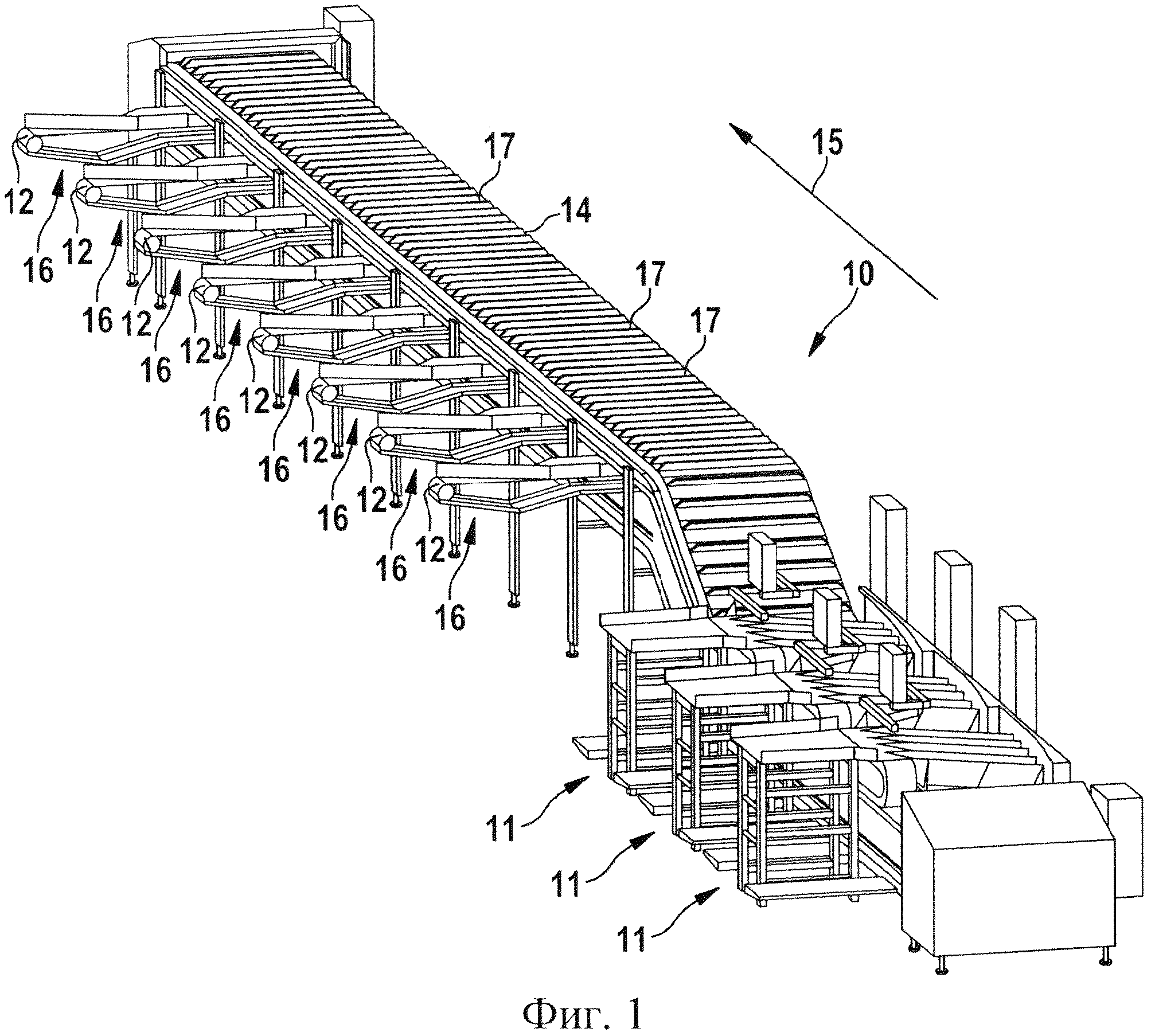
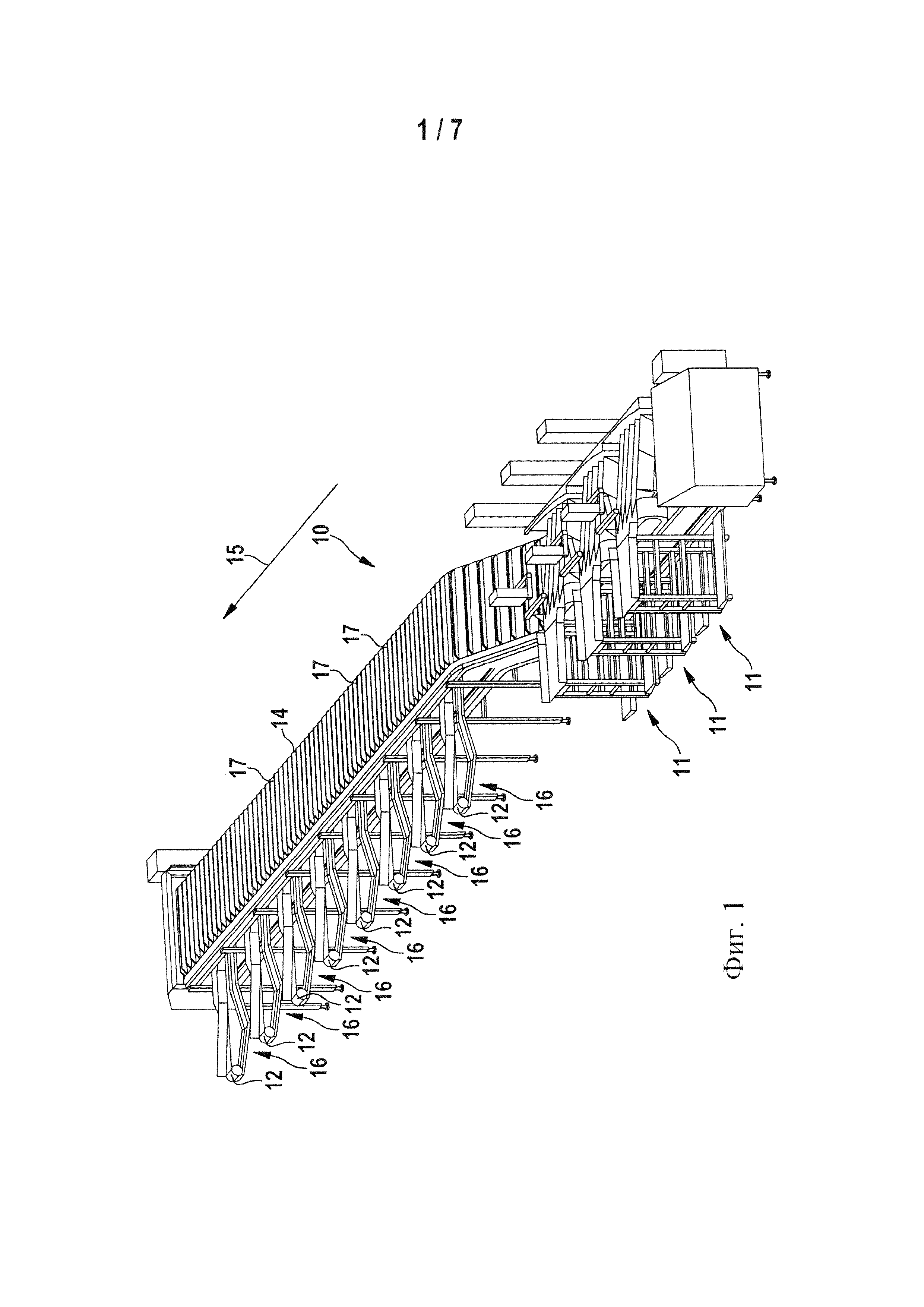
на фиг. 1 представлен вид в аксонометрии иллюстративного устройства подачи рыбы в соответствии с предложенным изобретением с тремя загрузочными устройствами и восьмью продольными конвейерами,
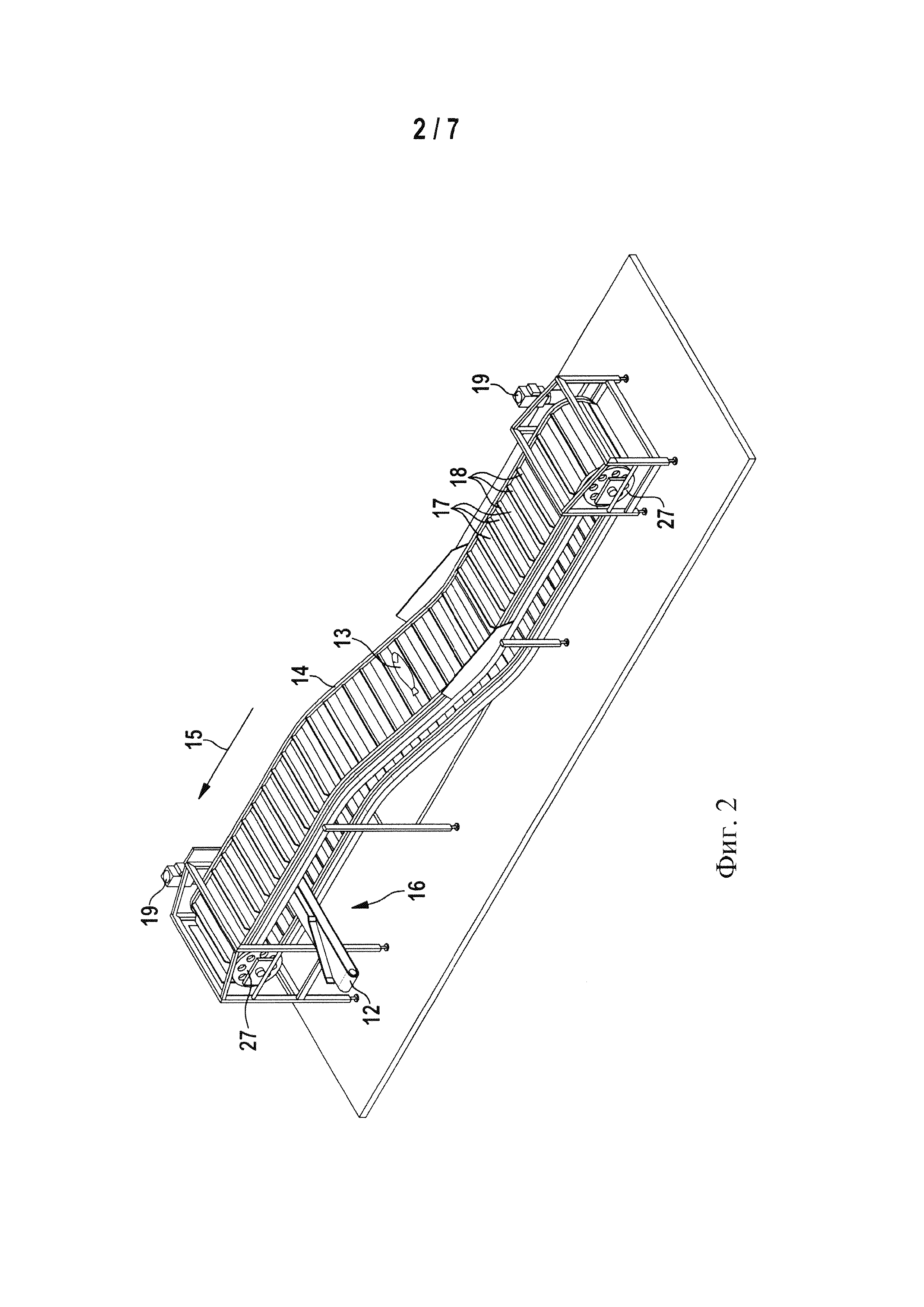
на фиг. 2 представлен вид в аксонометрии поперечного конвейера в соответствии с предложенным изобретением вместе с передаточным устройством,
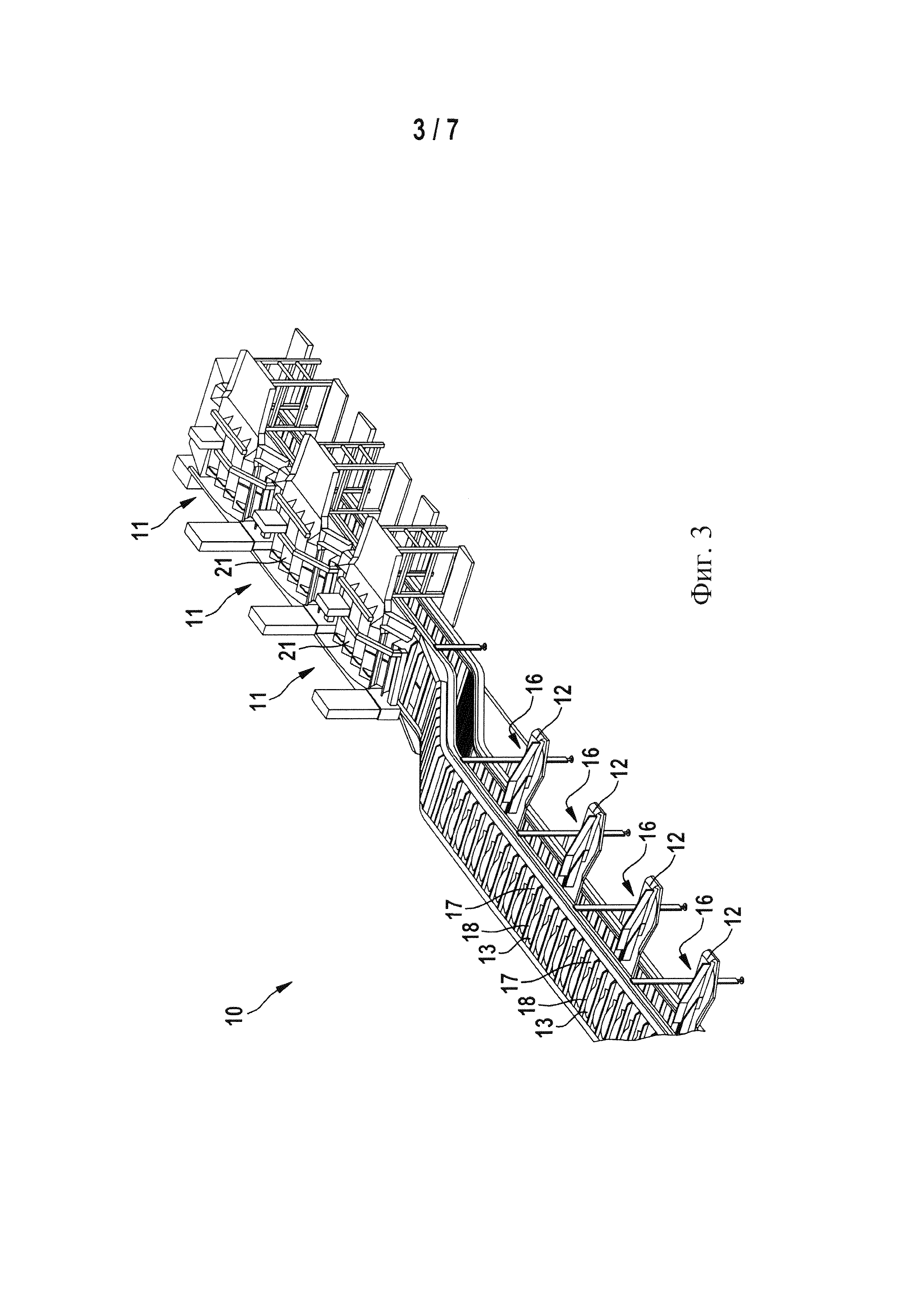
на фиг. 3 представлен частичный вид устройства подачи рыбы, показанного на фиг. 1,
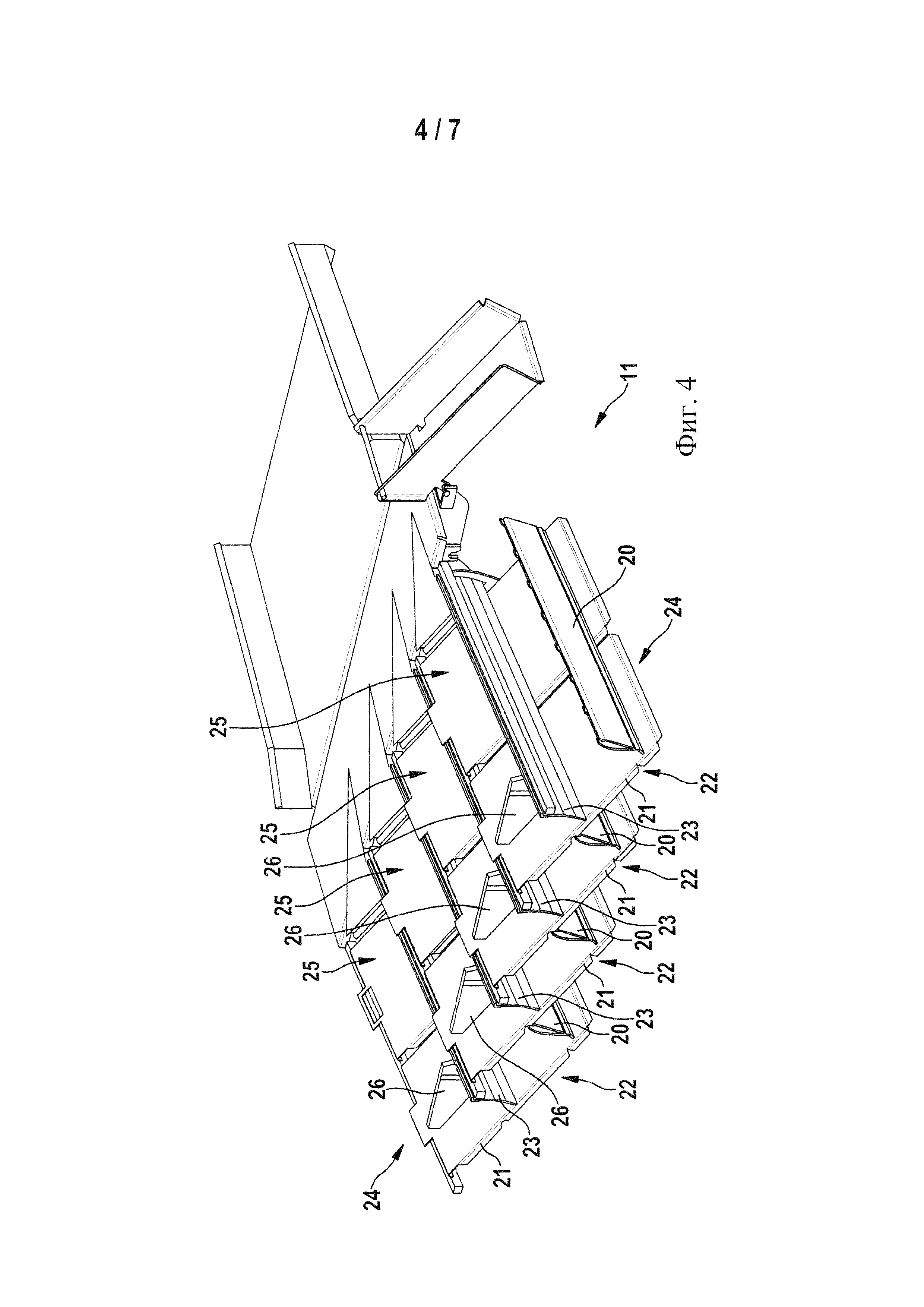
на фиг. 4 представлен вид в аксонометрии примера варианта выполнения одного из загрузочных устройств,
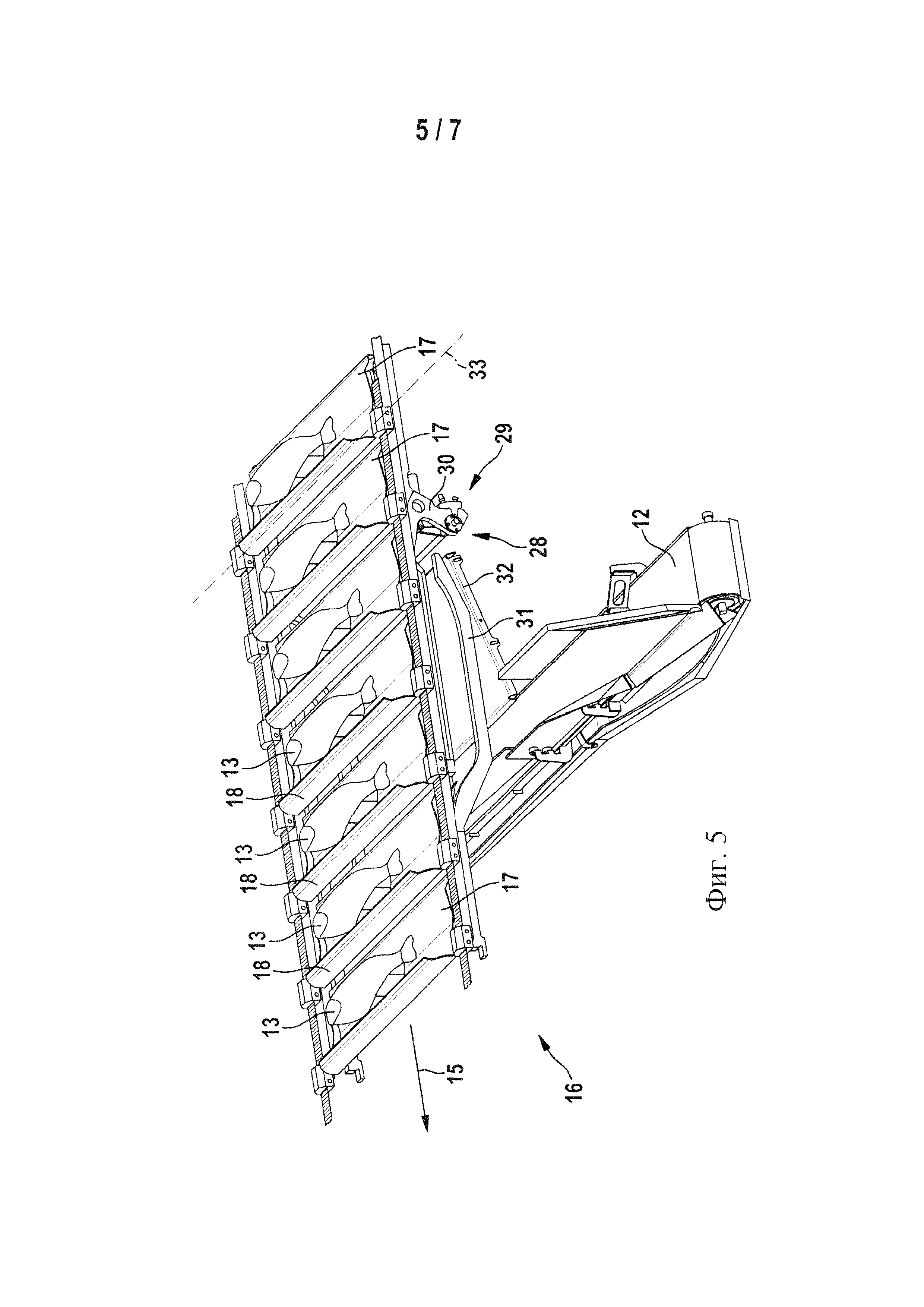
на фиг. 5 представлен детальный вид в аксонометрии поперечного конвейера и передаточного устройства,
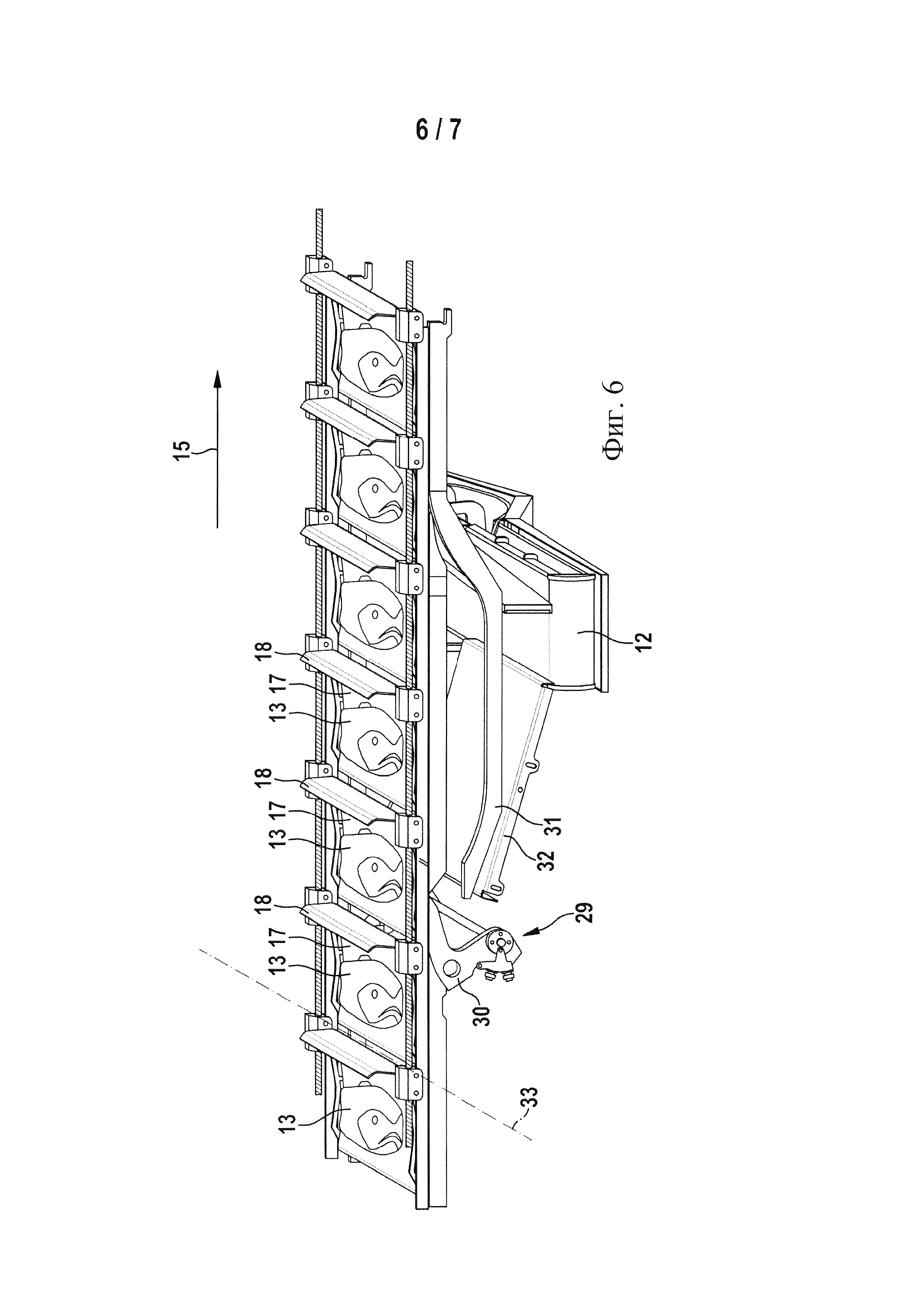
на фиг. 6 представлен детальный вид в аксонометрии сзади, в соответствии с фиг. 5, и
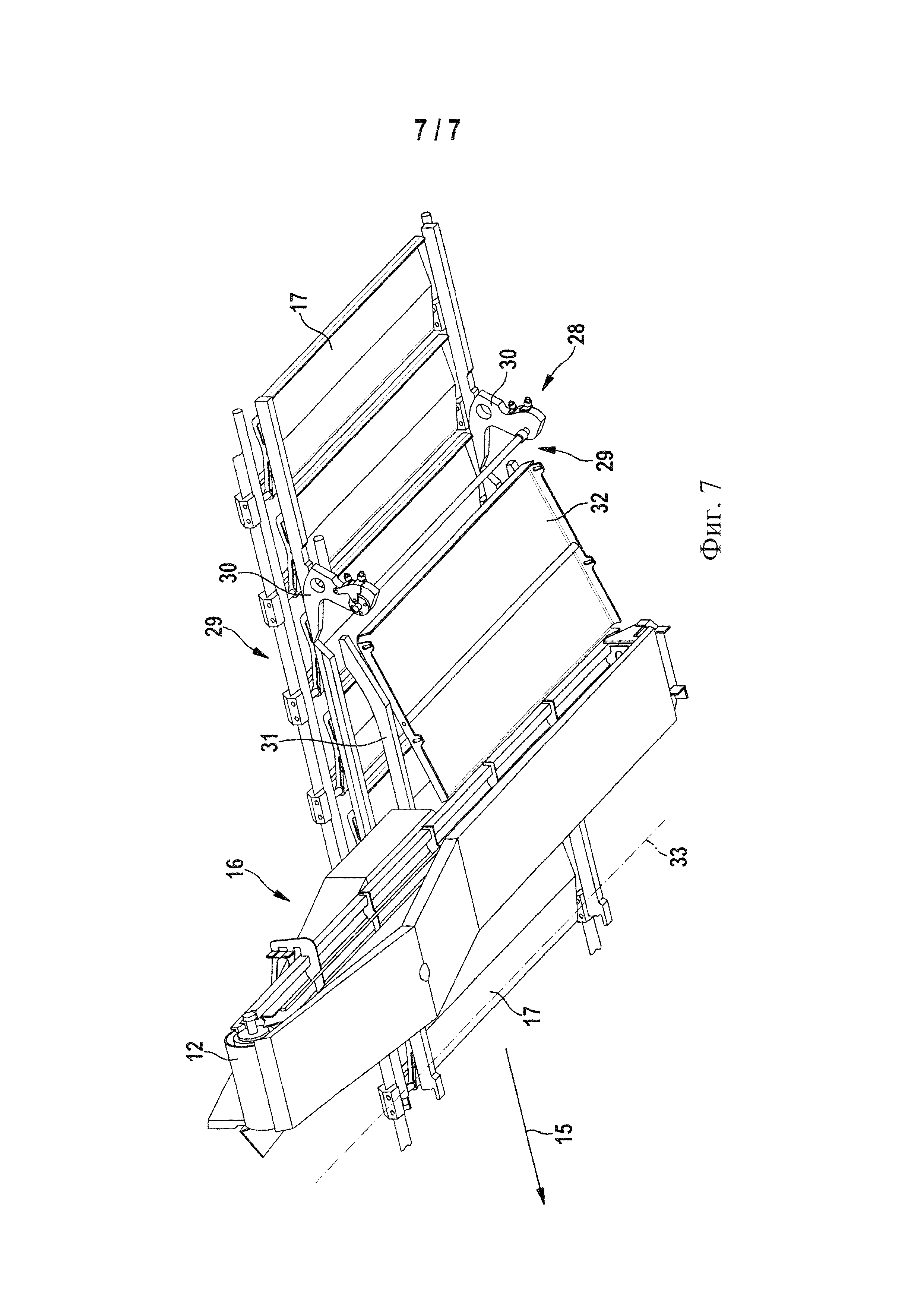
на фиг. 7 представлен детальный вид, показанный на фиг. 5 и 6, на виде снизу.
На фиг. 1 показан вид в аксонометрии устройства 10 подачи рыбы в соответствии с предложенным изобретением. В качестве примера, устройство 10 подачи рыбы выполнено с тремя загрузочными устройствами 11 и восемью продольными конвейерами 12. Посредством продольных конвейеров 12 рыбу 13 (на фиг. 1 не показано) направляют к нескольким обрабатывающим рыбу устройствам. Обрабатывающие рыбу устройства, например устройства для забоя и/или потрошения, на чертеже не показаны ради ясности изображения. Количество изображенных устройств 10 подачи рыбы и продольных конвейеров 12, очевидно, не ограничено показанным на фиг. 1 количеством и приведено исключительно для иллюстрации. Как было объяснено вначале, одно существенное преимущество предложенного изобретения заключается в том, что количество загрузочных устройств 11 и количество продольных конвейеров 12, а также обрабатывающих рыбу машин, присоединенных к ним, может быть выполнено произвольно в зависимости от применения.
Устройство 10 подачи рыбы в соответствии с предложенным изобретением содержит поперечный конвейер 14, выполненный с возможностью транспортирования рыбы 13 поперек ориентации голова-хвост в поперечном направлении 15 транспортирования. Ориентация голова-хвост определяется теоретической осью, проходящей от головы к хвосту рыбы 13. Рыбу 13 транспортируют посредством поперечного конвейера 14 поперек этой оси в поперечном направлении 15 транспортирования. Поперечное направление 15 транспортирования и указанная ось в данном случае образуют прямой угол или приблизительно прямой угол. Ориентация рыбы 13, то есть направление, в котором ориентирована голова рыбы 13, является в принципе произвольной. Однако, предпочтительно, рыба ориентирована на поперечном конвейере 14 так, что затем ее транспортирование посредством продольного конвейера 12 происходит хвостом вперед.
На фиг. 2, на котором изображен вид в аксонометрии поперечного конвейера 14 в соответствии с изобретением вместе с одним передаточным устройством 16, показано, что поперечный конвейер 14 содержит множество приемников 17, каждый из которых выполнен с возможностью приема одной рыбы 13. Длина приемников 17 превышает наибольшую длину рыбы 13. Предпочтительно, приемники 17 имеют краевые элементы 18, выступающие вверх относительно нижней части приемников 17, обеспечивающие надежное транспортирование рыбы 13 приемниками 17 в поперечном направлении 15 транспортирования. Помимо этого, предпочтительно, нижняя часть выполнена с наклоном к середине приемников 17 с обеспечением возможности автоматического центрирования рыбы 13 под действием силы тяжести в приемниках 17. Поперечный конвейер 14 содержит приводной блок 19, который выполнен с возможностью управления и содержит, например, один или более управляемых приводов серводвигателей.
Как показано, например, на фиг. 1, устройство 10 подачи рыбы в соответствии с изобретением содержит по меньшей мере одно загрузочное устройство 11, предназначенное для подачи рыбы 13 в приемники 17 поперечного конвейера 14. Предпочтительно, операторы вручную переносят рыбу 13 к загрузочным средствам 11, а указанные загрузочные устройства 11 затем полностью автоматически подают рыбу 13 в приемники 17 поперечного конвейера 14. Загрузочные устройства 11 и приемники 17 выполнены с обеспечением возможности подачи одной рыбы 13 в каждый из приемников 17.
Кроме того, устройство 10 подачи рыбы в соответствии с изобретением содержит несколько передаточных устройств 16, выполненных с возможностью выборочной передачи рыбы из поперечного конвейера 14 на соответствующий продольный конвейер 12, расположенный выше по технологическому потоку от обрабатывающих рыбу устройств.
Устройство управления (на чертеже не показано) обеспечивает управление упомянутым по меньше мере одним загрузочным устройством 11, передаточными устройствами 16 и скоростью транспортирования поперечного конвейера 14 на основании по меньшей мере одних заданных правил распределения. Другими словами, устройство управления предназначено и выполнено с возможностью управления или регулирования вышеупомянутых компонентов.
Предпочтительно, загрузочное устройство 11, показанное на фиг. 4, содержит по меньшей мере один синхронизирующий клапанный элемент, выполненный с возможностью управляемого перемещения. Указанный элемент предназначен для управления, с помощью управляющего сигнала синхронизации, генерируемого устройством управления, загрузкой рыбы 13 в один из приемников 17 в предварительно выбранное время выпуска. Другими словами, устройство управления предназначено и выполнено с обеспечением возможности передачи одной рыбы 13 в соответствующий приемник 17 с прохождением через синхронизирующий клапанный элемент 20 с его использованием до тех пор, пока загрузка рыбы 13 выполняется в соответствии с правилами распределения, так что в приемник подается одна единственная рыба 13.
Преимущественно, загрузочное устройство 11 содержит направляющую плоскость 21, расположенную с наклоном так, что под действием силы тяжести рыба 13 автоматически ложится на первый участок 22 удержания, расположенный перед синхронизирующим клапанным элементом 20, когда он находится в закрытом положении, и автоматически перемещается в направлении поперечного конвейера 14 в соответствующий приемник 17, когда синхронизирующий клапанный элемент 20 находится в открытом положении. На фиг. 4 синхронизирующий клапанный элемент 20 показан в закрытом положении.
В соответствии с предпочтительным вариантом выполнения предложенного изобретения загрузочное устройство 11 содержит накопительный клапанный элемент 23, выполненный с возможностью управляемого перемещения. Накопительный клапанный элемент 23 вместе с синхронизирующим клапанным элементом 20 формируют каскад 24 клапанных элементов. Рыбу 13 вводят с помощью направляющей плоскости
21 на участок 25 ожидания перед накопительным клапанным элементом 23. Когда накопительный клапанный элемент 23 находится в открытом положении, то соответствующая рыба 13 перемещается под действием силы тяжести на первый участок 22 удержания и останавливается перед синхронизирующим клапанным элементом 20, который находится в закрытом положении, до его перемещения в открытое положение с поступлением рыбы 13 в соответствующий приемник 17, как изложено выше.
Преимущественно, устройство управления выполнено с возможностью управления каскадом 24, так что, когда синхронизирующий клапанный элемент 20 перемещается из открытого положения в закрытое положение, накопительный клапанный элемент 23 перемещается из закрытого положения в открытое положение и наоборот. Следовательно, устройство управления выполнено, понимая инерционный характер перемещения рыбы 13, с возможностью учета возникающих задержек, так что процесс открытия накопительного клапанного элемента 23 начинается, например, даже тогда, когда синхронизирующий клапанный элемент 20 все еще находится в открытом положении. Однако при этом гарантируется, что синхронизирующий клапанный элемент 20 находится в уже закрытом положении или уже закрылся настолько, что соответствующая рыба 13 останавливается на первом участке 22 удержания. Таким образом, обеспечивается временная остановка рыбы 13 по меньшей мере на первом участке 22 удержания.
В соответствии с предпочтительным вариантом выполнения предложенного изобретения на участке накопительного клапанного элемента 23 расположен датчик 26, предназначенный для обнаружения рыбы. Упомянутый датчик предназначен и выполнен с возможностью обнаружения наличия рыбы 13 на участке 25 ожидания, расположенном перед сохраняющим клапанным элементом 23, и передачи информации об этом устройству управления.
Преимущественно несколько загрузочных устройств 11 расположено друг за другом и со смещением относительно друг друга в поперечном направлении 15 транспортирования по меньшей мере на ширину приемника 17. Количество загрузочных устройств 11, расположенных со смещением, может быть выбрано произвольно в зависимости от необходимости. Как показано, например, на фиг. 4, устройство 10 подачи рыбы в соответствии с предложенным изобретением может содержать четыре загрузочных устройства 11. Каждое из загрузочных устройств 11, предпочтительно, расположено со смещением на ширину приемника 17, так что подача в последовательные приемники может происходить без перерыва.
Приемники 17 поперечного конвейера 14, предпочтительно, образуют циркуляционный конвейер. Каждый из приемников 17, формирующих поперечный конвейер 14, направляется по меньшей мере двумя приводными колесами 27, каждое из которых приводится во вращение приводным блоком 19. Особенно предпочтительно, каждый из приемников 17 выполнен с возможностью поворота вокруг поперечной оси 33. Другими словами, приемники 17 и поперечный конвейер 14 выполнены так, что приемники 17 могут быть наклонены с помощью устройства управления. Вследствие наклонного положения приемника 17 рыба 13, расположенная в соответствующем приемнике 17, выскальзывает под действием силы тяжести и направляется на соответствующий продольный конвейер 12 на участок передаточных устройств 16.
На фиг. 5 показан детальный вид в аксонометрии поперечного конвейера 14 и одного из передаточных устройств 16. Каждое из передаточных устройств 16 содержит извлекающий сбрасыватель 28, предназначенный и выполненный с возможностью поворота соответствующего приемника 17 из положения транспортирования рыб в положение извлечения рыбы с помощью сигнала управления передачей, генерируемого устройством управления. Положение извлечения рыбы соответствует наклонному положению соответствующего приемника 17, описанному выше, при этом на чертеже показано только положение транспортирования рыбы.
Предпочтительный вариант выполнения характеризуется тем, что извлекающий сбрасыватель 28 содержит поворотную направляющую 29, выполненную с возможностью управления с помощью сигнала управления передачей. Поворотная направляющая 29 содержит поворотные элементы 30. В первом транспортирующем рыбу положении, как показано на фиг. 4 и 5, поворотный элемент 30 расположен так, что обеспечивается направление приемников в поперечном направлении 15 транспортирования. Если поворотный элемент 30 поворачивается в соответствии с сигналом управления передачей в нижнее положение (на чертеже не показано), то задняя часть приемника 17 наклоняется относительно поперечного направления 15 транспортирования вокруг поперечной оси 33, при этом заднюю часть приемника 17 направляет поворотный элемент 30 и отклоняющая направляющая 31, так что соответствующий приемник 17 приводится в положение извлечения рыбы.
Предпочтительно, каждое из передаточных устройств содержит направляющие средства 32 на участке извлекающего сбрасывателя 28, выполненные с возможностью передачи рыбы 13 из приемников 17, находящихся в положении извлечения рыбы, на соответствующий продольный конвейер 12 под действием силы тяжести.
На фиг. 6 и 7 также показан детальный вид в аксонометрии, изображенный на фиг. 5, соответственно, сзади и снизу.
В соответствии с другим преимущественным вариантом выполнения изобретения каждое передаточное устройство 16 содержит датчики заполнения рыбой (на чертеже не показаны). Датчики заполнения рыбой выполнены с возможностью сообщения устройству управления информации о том, что соответствующий продольный конвейер 12 заполнен рыбой 13 или о том, что он свободен в области передаточного устройства 16.
Предпочтительно, устройство управления выполнено с возможностью, при подаче рыбы 13 в приемник 17, назначения указанного приемника 17 одной из обрабатывающих рыбу машин на основании заданных правил распределения и определения правил назначения. Кроме того, устройство управления, в частности, выполнено с возможностью определения местоположения приемников 17 и определения соответствующего времени выпуска рыбы на основании правил назначения и определенных местоположений приемников 17. Данные местоположения могут быть определены, например, с помощью контрольного датчика, определяющего момент прохождения приемником 17 контрольного положения. Устройство управления также выполнено с возможностью предварительного определения и задания скорости движения поперечного конвейера 14, кроме того оно, предпочтительно, выполнено с возможностью определения местоположений приемников 17 на основании сигналов местоположения, передаваемых контрольным датчиком, и скорости транспортирования.
Преимущественно, устройство управления выполнено с возможностью определения приемной способности обрабатывающих рыбу машин и/или состояний заполнения передаточных устройств 16, и определения на их основании фактической приемной способности каждого обрабатывающего рыбу устройства.
В соответствии с другим предпочтительным вариантом выполнения предложенного изобретения устройство управления содержит блок сравнения, обеспечивающий сравнение фактической приемной способности каждого из обрабатывающих рыбу устройств с заданной номинальной приемной способностью обрабатывающего рыбу устройства, при этом, если по меньшей мере значение одной из фактических приемных способностей опускается ниже соответствующего значения номинальной приемной способности, то заданные правила распределения изменяют так, что соответствующая номинальная приемная способность по меньшей мере временно снижается.
Предпочтительно, устройство управления дополнительно выполнено с возможностью определения совокупной фактической приемной способности в виде суммы фактических приемных способностей обрабатывающих рыбу машин, а также с возможностью управления скоростью транспортирования поперечного конвейера 14 так, что подача приемников 17 осуществляется без перерыва.
Устройство и способ отделения частей разрезанного продукта
Устройство и способ филетирования обезглавленной и выпотрошенной рыбы
Устройство и способ полного отделения филе от скелета обезглавленной и выпотрошенной рыбы с перерезанием перемычки, оставленной другими инструментами
Устройство для двустороннего бокового надрезания кожи выпотрошенной тушки животного в насаженном положении, опорный элемент такого устройства для насаживания тушки животного, обрабатывающая машина, использующая устройство для надрезания кожи, а также соответствующий способ надрезания кожи
Устройство для автоматизированной механической обработки последовательно транспортируемых мясных частей туши и способ, реализуемый при помощи этого устройства
Способ удаления выступившей при филетировании крови с хребтовой кости рыб и устройство для удаления такой крови
Способ механизированного удаления межмышечных костей из филейных частей транспортируемых рыб и устройство для осуществления способа
Способ выполнения филетирующего разреза для филетирования рыб, устройство для выполнения филетирующего разреза согласно этому способу, и пара дисковых ножей и дисковый нож, предназначенные для способа и устройства
Подшипник качения и устройство для кругового движения с подшипником качения
Способ и устройство для контроля машины для переработки мяса
Способ и устройство для контроля машины для переработки мяса
Устройство для транспортирования и распределения умерщвленной рыбы
Соединительное устройство приводного ремня, предназначенное для обеспечения устойчивого к растяжению соединения концевых участков плоского приводного ремня, приводной ремень и конвейерное устройство, содержащее его
Устройство и способ обработки рыбы
Способ и устройство для выявления положения брюшка/спинки рыбы, транспортируемой с помощью транспортирующего приспособления

