Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДЛЯ ТРАНСПОРТИРОВКИ ПАКЕТОВ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе и способу для транспортировки пакетов для содержания продуктов. Такие продукты могут представлять собой пищевые продукты. Как правило, продукты имеют жидкую или гранулированную форму. После того, как пакет был выполнен, к его грани может быть приварен распределительный носик. Носик является жестким, в то время как пакет является гибким. В альтернативном решении, носик может отсутствовать, и для распределения, например, клапан пакета может быть отрезана, или может быть использована трубочка для помещения в него.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известна система для перемещения пакетов, в которой предусмотрены захватывающие приспособления, которые захватывают и перемещают пакет, удерживая его за носик (который представляет собой наиболее жесткую часть).
Пакеты могут, таким образом, перемещаться с помощью поворотных столов, взаимодействующих друг с другом. В этом случае, поворотный стол захватывает пакет, и отпускает его на следующем поворотном столе, который, в свою очередь, захватывает его за носик.
В альтернативном решении, пневматические приспособления проталкивают пакеты, вынуждая их перемещаться вдоль определенных направляющих.
ПРЕДМЕТ ИЗОБРЕТЕНИЯ
В данном контексте, технической задачей, лежащей в основе настоящего изобретения, является предложение системы и способа для транспортировки пакетов, обеспечивающих быстрое перемещение пакетов без риска их повреждения, даже в случае, если не предусмотрено какого-либо носика, или если носик еще не был присоединен к ним.
Указанная техническая задача и определенные цели, по существу, достигаются при помощи системы управления и способа для транспортировки пакетов, обладающих техническими характеристиками, определенными в одном или нескольких из пунктов прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные особенности и преимущества настоящего изобретения станут более понятными из примерного и, таким образом, неограничивающего описания предпочтительного, но не исключительного воплощения системы управления и способа транспортировки пакетов, как показано на прилагаемых чертежах, на которых:
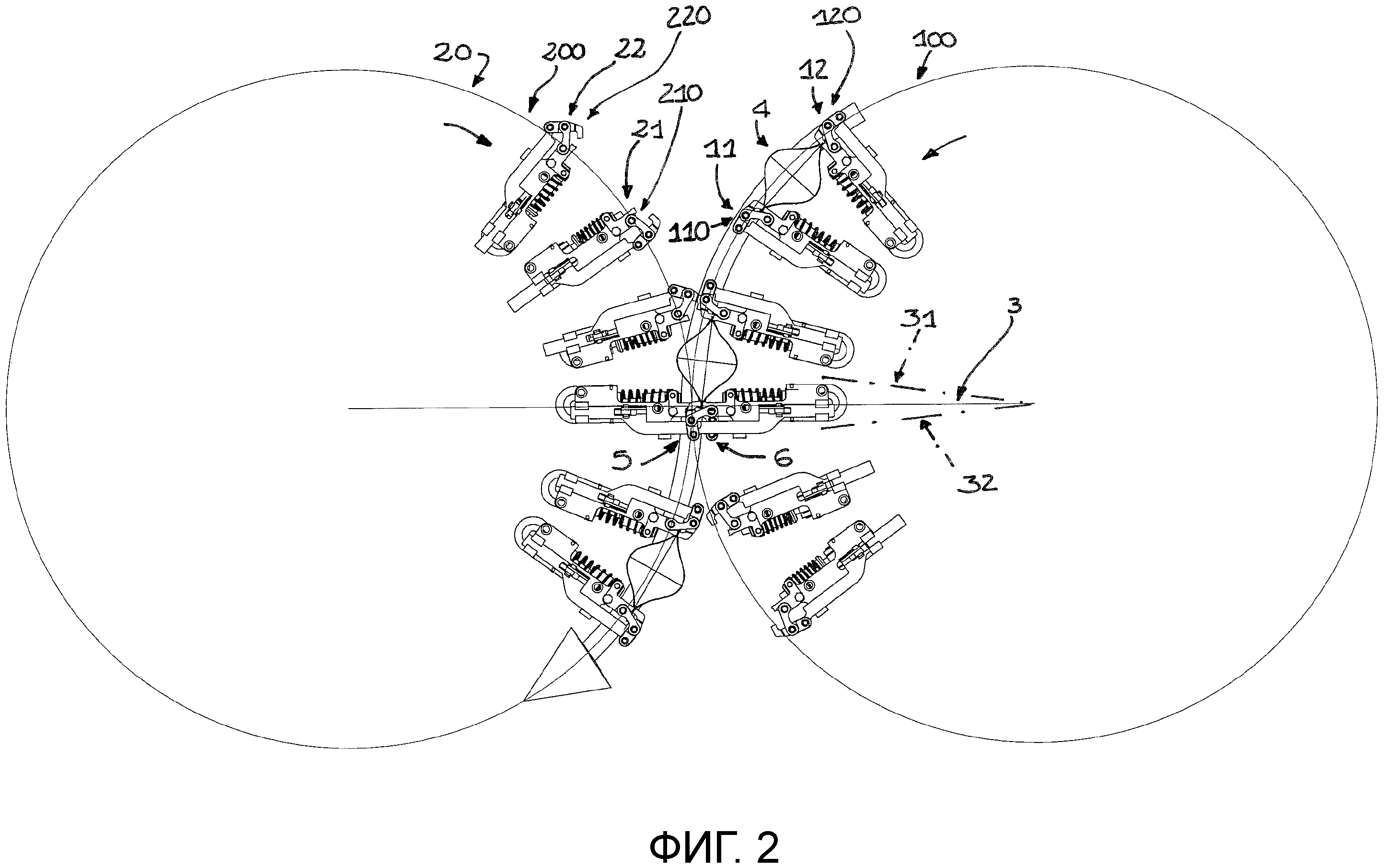
- Фиг.1 изображает вид сверху системы для транспортировки пакетов в соответствии с настоящим изобретением;
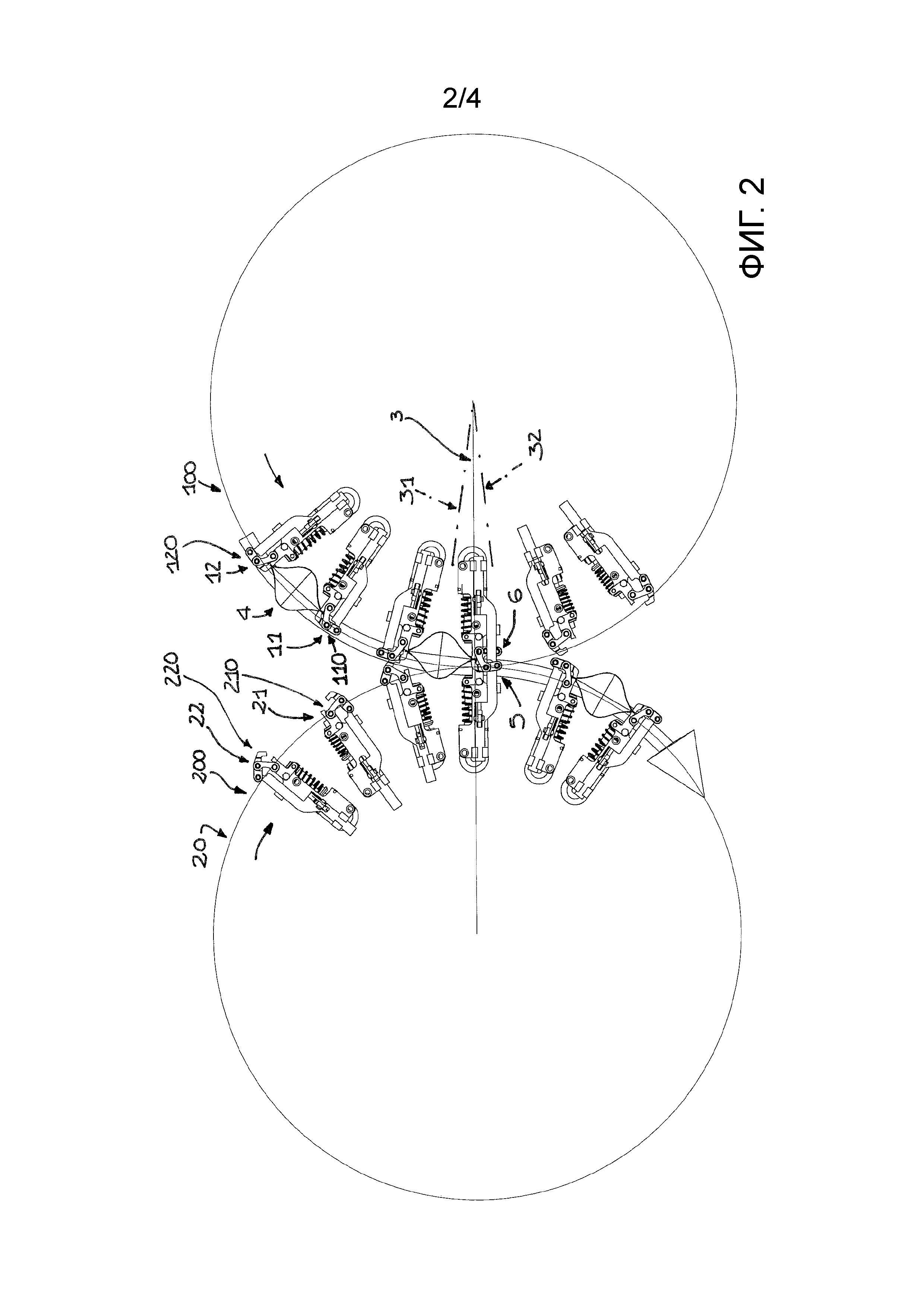
- Фиг.2 изображает вид сверху системы согласно Фиг.1, на котором некоторые части были удалены для того, чтобы лучше видеть другие части;
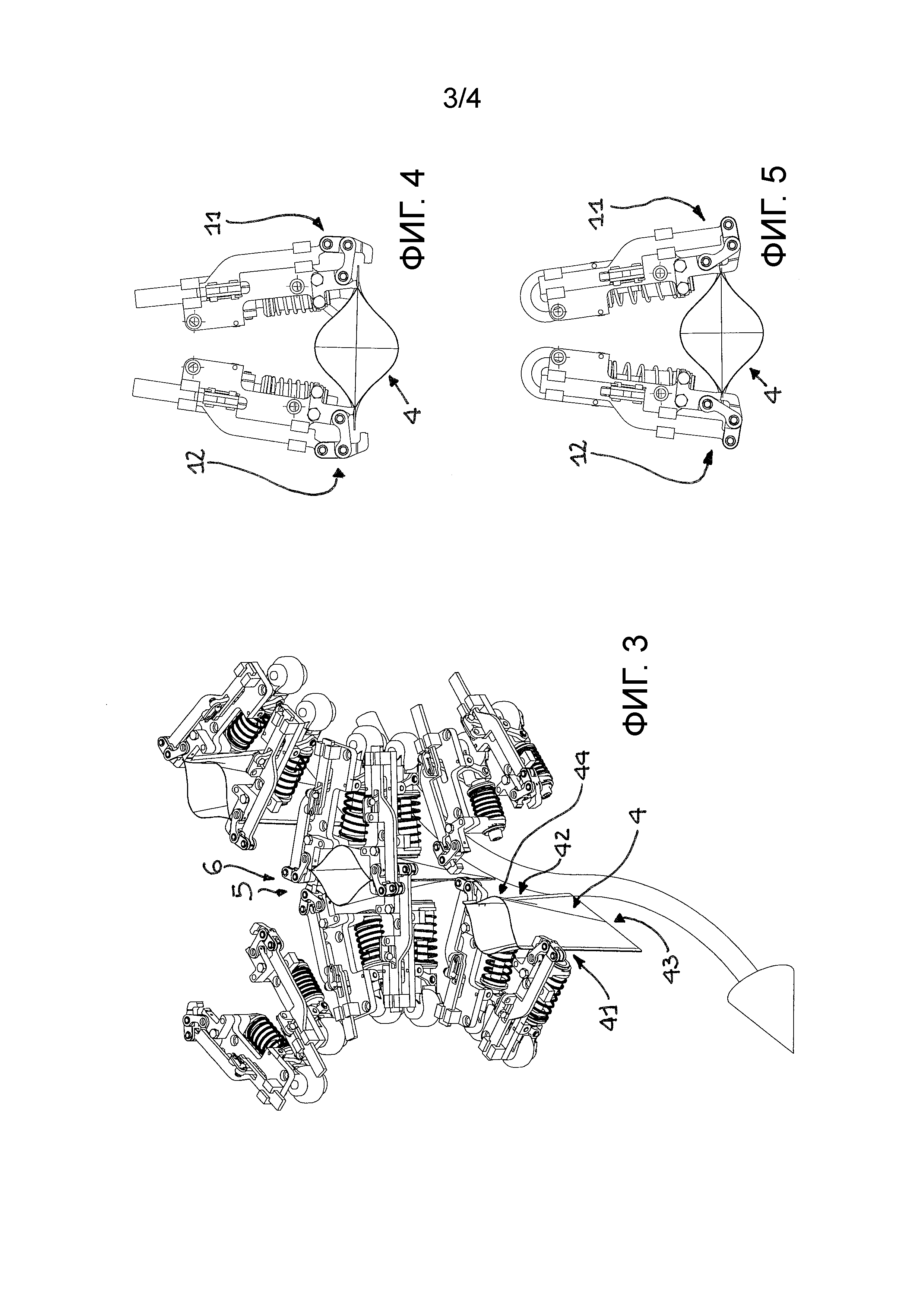
- Фиг.3 изображает вид в перспективе части согласно Фиг.2;
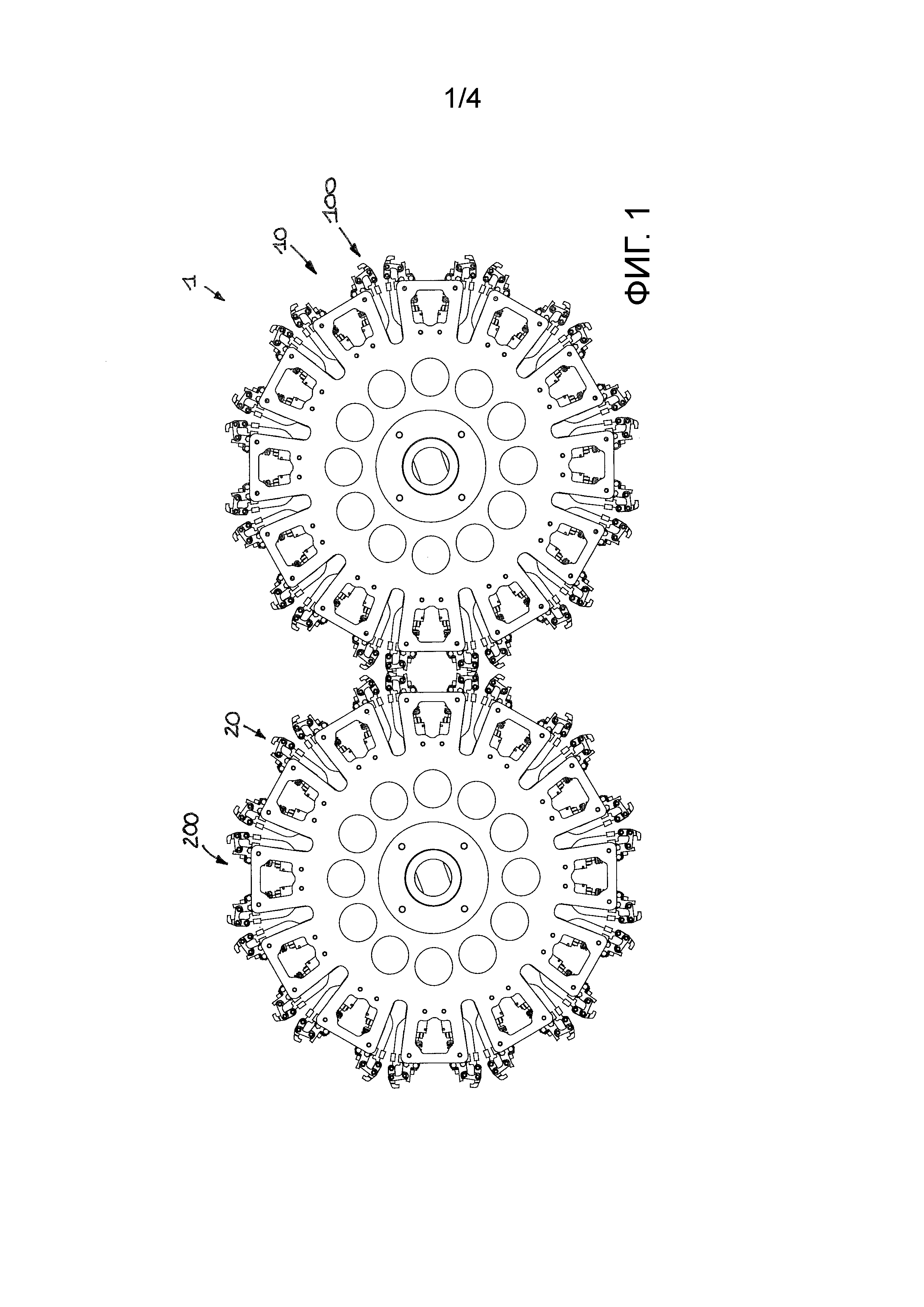
- Фиг.4 и 5 изображают две отличающиеся конфигурации компонента транспортирующей системы в соответствии с настоящим изобретением.
- Фиг.6 и 7 изображают виды сбоку двух различных систем для транспортировки пакетов в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На прилагаемых чертежах, ссылочной позицией 1 обозначена система для транспортировки пакетов для содержания продуктов.
Система 1 содержит первый конвейер 10, содержащий первый поворотный стол 100, в свою очередь, содержащий первые и вторые захватывающие приспособления 11, 12, предназначенные для захвата двух различных частей одного пакета.
Первые и вторые захватывающие приспособления 11, 12 располагаются последовательно вдоль внешнего периметра первого поворотного стола 100.
В частности, первые захватывающие приспособления 11 содержат первый захват 110. Вторые захватывающие приспособления 12 содержат второй захват 120. Первый захват 110 может приводиться в действие независимо от второго захвата 120. В частности, первый и второй захваты 110, 120 закрываются или открываются независимо. В частности, первый и второй захваты 110, 120 закрываются или открываются с помощью механических кулачков. Упругие приспособления оказывают противодействующую силу относительно действия, оказываемого кулачками первого и второго захватов 110, 120.
В альтернативном решении, которое не показано, первые и вторые захватывающие приспособления 11, 12 могут содержать всасывающие приспособления, удерживающие пакет путем создания пониженного давления в двух его разных точках. В этом случае, первые и вторые захватывающие приспособления 11, 12, соответственно, содержат первую и вторую всасывающие чашки.
Система 1 также содержит второй конвейер 20, предназначенный для обмена пакетами с первым поворотным столом 100. Второй конвейер 20 содержит третьи и четвертые захватывающие приспособления 21, 22, предназначенные для захвата двух различных частей одного пакета. Третьи и четвертые захватывающие приспособления 21, 22 располагаются последовательно вдоль направления продвижения второго конвейера 20. Также в этом случае, третьи захватывающие приспособления 21, предпочтительно, содержат третий захват 210. Подобным образом, четвертые захватывающие приспособления 22 содержат четвертый захват 220. Альтернативно, третьи и четвертые захватывающие приспособления 21, 22 могут содержать соответствующие всасывающие приспособления, которые удерживают пакет путем создания подходящего пониженного давления (решение не показано).
В решении, представленном на Фиг.7, первые захватывающие приспособления содержат первую пару 71 захватов, один из которых установлен на другой. Это позволяет захватывать пакет в двух перекрывающихся зонах. Подобным образом, третьи захватывающие приспособления 21 содержат вторую пару 71 захватов, один из которых установлен на другой. Подходящим образом, захваты второй пары 72 захватов располагаются на разной высоте от захватов первой пары захватов 71. Предпочтительно, захваты второй пары 72 захватов располагаются на промежуточной высоте относительно захватов первой пары 71 захватов.
Зона транспортировки 5 пакетов между указанным первыми захватывающими приспособлениями 11 и вторым конвейером 20 расположена в зоне перекрытия между траекторией первых захватывающих приспособлений 11 и траекторией третьих захватывающих приспособлений 21.
Зона транспортировки 6 пакетов между указанными вторыми захватывающими приспособлениями 12 и вторым конвейером 20 расположена в зоне перекрытия между траекторией вторых захватывающих приспособлений 12 и траекторией четвертых захватывающих приспособлений 22.
Предпочтительно, второй конвейер 20 содержит второй поворотный стол 200. В отношении оси вращения первого поворотного стола 100, зона транспортировки 5 пакетов между указанными первыми захватывающими приспособлениями 11 и вторым конвейером 20 расположена в той же зоне, в которой осуществляется транспортировка пакетов между вторыми захватывающими приспособлениями 12 и вторым конвейером 20. Указанная одна зона располагается вдоль прямой линии, соединяющей оси вращения первого и второго поворотных столов 100, 200. Она также соответствует перпендикулярной зоне между основными диаметрами первого и второго поворотных столов 100, 200 (по отношению к ортогональному виду сверху на оси вращения поворотных столов).
Другими словами, по отношению к абсолютно зафиксированной точке в пространстве, зоны 5 и 6 совпадают. Поэтому, сначала будет осуществляться транспортировка пакета между первым захватывающими приспособлениями 11 и вторым конвейером 20, и затем - транспортировка пакета между вторыми захватывающими приспособлениями 12 и вторым конвейером 20.
В зоне транспортировки 5 пакета между первыми захватывающими приспособлениями 11 и вторым конвейером 20, траектория, по которой следует первый захват 110, лежит над или под траекторией, по которой следует третий захват 210.
В зоне транспортировки 6 пакета между вторыми захватывающими приспособлениями 12 и вторым конвейером 20, траектория, по которой следует второй захват 120, лежит над или под траекторией, по которой следует четвертый захват 220.
Со ссылкой на вышесказанное, захват представляет собой компонент, предпочтительно, содержащий две губки, обеспечивающие ему возможность зажимать клапан пакета между ними.
Предметом настоящего изобретения также является способ транспортировки пакетов для содержания продуктов. Подходящим образом, данный способ осуществляется при помощи системы для транспортировки пакетов, обладающей одним или несколькими из признаков, описанных выше. Способ содержит следующие этапы:
(i) захват двух соответствующих створок пакета с помощью первых и вторых захватывающих приспособлений 11, 12 (как правило, пакет располагается вертикально, и два клапана могут располагаться по противоположных вертикальным сторонам пакета 4), причем, как указано выше, захватывающие приспособления 11, предпочтительно, содержат первых захват 110 или всасывающее устройство, и вторые захватывающие приспособления 12 содержат второй захват 120 или всасывающее устройство;
(ii) транспортировку указанного пакета между первым поворотным столом 100 и вторым конвейером 20.
Этап транспортировки пакета между первым поворотным столом 100 и вторым конвейером 20 выполняется после этапа захвата с помощью первых и вторых захватывающих приспособлений 11, 12 двух соответствующих створок пакета.
Один элемент из первого поворотного стола 100 и второго конвейера 20 содержит первые и вторые захватывающие приспособления 11, 12 соответствующих створок пакета, а другой элемент содержит третьи и четвертые захватывающие приспособления 21, 22 пакета.
Этап транспортировки пакета между первым поворотным столом 100 и вторым конвейером 20 содержит следующие подэтапы:
- захват пакета 4 с помощью третьих захватывающих приспособлений 21;
- разжимание первых захватывающих приспособлений 11, которые захватывают пакет 4;
- захват пакета 4 с помощью четвертых захватывающих приспособлений 22;
- разжимание вторых захватывающих приспособлений 12, удерживающих пакет 4;
Этапы захвата пакета 4 с помощью четвертых захватывающих приспособлений 22 и разжимания вторых захватывающих приспособлений 12 выполняются после этапа захвата пакета 4 с помощью третьих захватывающих приспособления 21 и этапа разжимания первых захватывающих приспособлений 11. Фактически, для предотвращения повреждения/поломки пакета 4, пакет 4 должен передаваться между захватом рабочего стола 100 и захватом конвейера 20 в перпендикулярной зоне поворотного стола 100 и захвата конвейера 20 в зоне касания основных диаметров поворотных столов. Поскольку пакет 4 удерживается парой захватов, которые перемещаются в разное время в указанной перпендикулярной зоне, необходимо, чтобы при перемещении, сопровождающем транспортировку пакета между поворотным столом 100 и конвейером 20, он поддерживалась по меньшей мере одним захватом поворотного стола 100 и по меньшей мере одним захватом конвейера 20. С этой целью, гибкость пакета 4 обеспечивает ему возможность следовать за изменениями траектории, вызванными переходом между поворотным столом 100 и вторым конвейером 20.
В отношении направления перемещения первого поворотного стола 100 и второго конвейера 20, первый захват 110 расположен впереди второго захвата 120. Подобным образом, в отношении направления перемещения первого поворотного стола 100 и второго конвейера 20, третий захват 210 расположен впереди четвертого захвата 220.
Предпочтительно, пакет 4 передается от первого поворотного стола 100 на второй конвейер 20, первый поворотный стол 100, таким образом, содержит первые и вторые захватывающие приспособления 11, 12, в то время как второй конвейер 20 содержит третьи и четвертые захватывающие приспособления 21, 22. В альтернативном воплощении может случиться, что пакет передается от второго конвейера 20 на первый поворотный стол 100.
Этап транспортировки пакета 4 между первым поворотным столом 100 и вторым конвейером 20 содержит:
- начальный и завершающий этап, на котором пакет 4 захвачен лишь первым поворотным столом 100 или вторым конвейером 20;
- промежуточный этап, на котором пакет захвачен одновременно первым поворотным столом 100 и вторым конвейером 20.
Подходящим образом, этапы захвата пакета 4 третьими захватывающими приспособлениями 21 и разжимания первых захватывающих приспособлений 11 по существу выполняются одновременно.
Подобным образом, этапы захватывания пакета 4 четвертыми захватывающими приспособлениями 22 и разжимания вторых захватывающих приспособлений 12, по существу, выполняются одновременно.
Второй конвейер 20 может представлять собой ленточный конвейер, но в предпочтительном воплощении он представляет собой второй поворотный стол 200.
Определено:
- плоскость отсчета 3, содержащая ось вращения первого и второго поворотных столов 100, 200;
- первая и вторая плоскости 31, 32, содержащие ось вращения первого поворотного стола 100, лежащие на равноудаленном расстоянии относительно плоскости отсчета 3, и формирующие с указанной плоскостью отсчета 3 угол менее 3°, предпочтительно, меньший либо равный 1°; этапы захвата пакета 4 при помощи третьих захватывающих приспособлений 21, разжимания первых захватывающих приспособлений 11, захвата пакета 4 при помощи четвертых захватывающих приспособлений 22 и разжимания вторых захватывающих приспособлений 12 выполняются в пространстве между первой и второй плоскостями 31, 32.
В частности, этапы захвата пакета 4 при помощи третьих захватывающих приспособлений 21, разжимания первых захватывающих приспособлений 11, захвата пакета 4 при помощи четвертых захватывающих приспособлений 22 и разжимания вторых захватывающих приспособлений 12 выполняются в плоскости отсчета 3.
Этапы захвата пакета 4 при помощи третьих захватывающих приспособлений 21, разжимания первых захватывающих приспособлений 11, захвата пакета при помощи четвертых захватывающих приспособлений 22 и разжимания вторых захватывающих приспособлений 12 выполняются в точке касания основных диаметров первого и второго поворотных столов 100, 200. Фактически, в точке касания, окружная скорость первого и второго поворотных столов 100, 200 может совпадать.
Предпочтительно, пакет 4 содержит:
- первый клапан 41, который последовательно захватывается первыми и четвертыми захватывающими приспособлениями 11, 21;
- второй клапан 42, противоположный первому клапану 41, который последовательно захватывается вторыми и четвертыми захватывающими приспособлениями 12, 22, причем первый и второй клапаны представляют собой две боковые кромки периметра пакета 4;
- дно 43, соединяющее первый и второй клапаны 41, 42;
- кромку 44, соединяющую первый и второй клапаны 41, 42.
Предпочтительно, верхняя кромка 44, в случаях, предусматривающих присутствие носика для выпуска продукта из пакета, позволяет его закрыть.
В предпочтительном воплощении, этап присоединения распределительного носика к пакету 4 выполняется после этапа транспортировки пакета 4 между первым поворотным столом 100 и вторым конвейером 20. Подходящим образом, этап транспортировки пакета 4 между первым поворотным столом 100 и вторым конвейером 20 предусматривает транспортировку пакета, уже заполненного продуктом, который должен в нем храниться, или все еще пустым. Возможно, на верхней кромке 44, два перехлестывающихся листа, образующие пакет, отодвигаются друг от друга (в ожидании соединения с носиком, когда он оборудуется; следует подчеркнуть, что присутствие носика не обязательно).
Как упомянуто выше, пакет 4 является более гибким, чем распределительный носик. Несмотря на то, что он изготовлен из пластика, носик является более жестким, чем листы, образующие пакет 4.
В практическом воплощении, данный способ предусматривает заполнение пакета 4 в тот период времени, когда он находится на первом или втором конвейере 10, 20 (предпочтительно, на первом или втором поворотном столе 100, 200).
Предлагаемое изобретение обеспечивает возможность получения множества преимуществ.
В частности, оно позволяет транспортировать пакеты без захватывания их за носик, и без их повреждения или разламывания (что может произойти, если пакеты поддерживаются парой захватывающих приспособлений, и транспортируются между одним рабочим столом и другим конвейером в зоне, траектории в которой не проходят по касательной).
Предлагаемое изобретение допускает множество модификаций и вариантов, все из которых входят в пределы идеи изобретения, характеризующей изобретение. Кроме того, все элементы могут быть замещены другими, техническим эквивалентными элементами. Все используемые материалы, а также размеры, могут, на практике, быть любого типа, в соответствии с требованиями.

Устройство и способ для подачи пакетов к карусели

