Результат интеллектуальной деятельности: Многоканальный аппаратно-программный комплекс высокоскоростной цифровой обработки сигналов
Вид РИД
Изобретение
Изобретение в целом относится к многоканальным аппаратно-программным комплексам высокоскоростной цифровой обработки сигналов, используемым в многоканальных (по количеству независимых на приём и передачу фазовых центров антенны по азимуту и углу места, по количеству независимых на приём и передачу несущих частот и по количеству независимых на приём и передачу поляризаций) радиолокационных станциях (МРЛС), многоканальных радиолокационных станциях с синтезированием апертуры антенны (МРСА) и в радиолиниях передачи данных (РЛПД), которые, в свою очередь, предназначены для решения задач по картографированию земной (морской) поверхности, обнаружения объектов, скрытых под растительностью, решения задач систем наблюдения за движущимися и неподвижными объектами. Точнее - заявленное техническое решение относится к многоканальным аппаратно-программным комплексам (АПК) высокоскоростной цифровой обработки сигналов (ЦОС), позволяющим решать задачи по техническому управлению, функциональному контролю, определению текущего местоположения, хранению данных, приёма и передачи сигналов синхронизации, а также формированию, приёма и цифровой обработке высокочастотных (ВЧ) сигналов в режиме реального времени.
На дату представления заявленного технического решения в исследуемой области техники в мире существует проблема в разработке универсальных (унифицированных) реконфигурируемых многоканальных АПК высокоскоростной ЦОС, используемых как в МРЛС, МРСА, так и в РЛПД, обладающих возможностью радиолокационного картографирования местности, с высокой и сверхвысокой разрешающей способностью, обладающих возможностью обнаружения целей на фоне подстилающей поверхности, измерения их характеристик (сигнальных и несигнальных) и формирования радиолокационных изображений (РЛИ) в отношении как движущихся, так и неподвижных целей (радиолокационные системы), предназначенных для размещения как на стационарных объектах (носителях), например - МРЛС, устанавливаемых как на наземную систему с мачтой (перемещающуюся или неподвижную), так и на борту летательного аппарата, обладающих возможностью передачи полученных данных на пункт управления для дальнейшего использования по назначению, в режиме реального времени.
Исходя из условий эксплуатации и области применения, заявленный многоканальный АПК высокоскоростной ЦОС в целом должен обладать следующими базовыми характеристиками:
- минимально возможными массогабаритными показателями,
- высокой надёжностью,
- высокой ремонтопригодностью,
- минимально возможным энергопотреблением,
- исключением либо минимизацией применения иностранной элементной базы и программного обеспечения с целью обеспечения максимально возможного импортозамещения,
- обеспечения возможности совмещения функций различных радиолокационных систем, например (на дату подачи заявленных материалов) - функций МРСА по картографированию местности, по обнаружению целей, измерению их сигнальных и несигнальных характеристик, формированию РЛИ на борту носителя МРСА в отношении как движущихся, так и неподвижных целей с высокой разрешающей способностью [1,2], а также функций МРЛС по реализации цифрового диаграммообразования, селекции движущихся целей известным методом адаптивной пространственно-временной обработки и функций РЛПД – передачи полученных данных на пункт управления.
Для успешной реализации поставленного перечня требований заявленное техническое решение должно обеспечивать в режиме реального времени возможность реализации следующих задач:
- осуществлять приём и передачу сигналов как минимум по трём независимым каналам (фазовым центрам антенны (ФЦА)) [см. детально в источнике 1];
- определять текущее положение ФЦА МРСА с надлежащей точностью для построения РЛИ подстилающей поверхности и движущейся цели [см. в источнике 2];
- проводить обработку радиолокационных изображений в режиме реального времени, под которым понимается ситуация, когда суммарное время первичной ЦОС и формирования сфокусированного РЛИ (местности или движущейся цели) не превышает период синтезирования апертуры (далее Тс), обычно Тс лежит в переделах от нескольких миллисекунд до секунды;
- иметь возможность записи, считывания и передачи большого массива данных с высокой пропускной способностью.
Основываясь на вышеизложенном, заявителем проведен анализ исследованного уровня техники по зарубежным и отечественным научно-техническим источникам и патентным базам данных.
При исследовании уровня техники заявителем выявлено большое количество аналогов заявленного технического решения, позволяющих решать поставленные задачи в режиме реального времени с той или иной степенью точности.
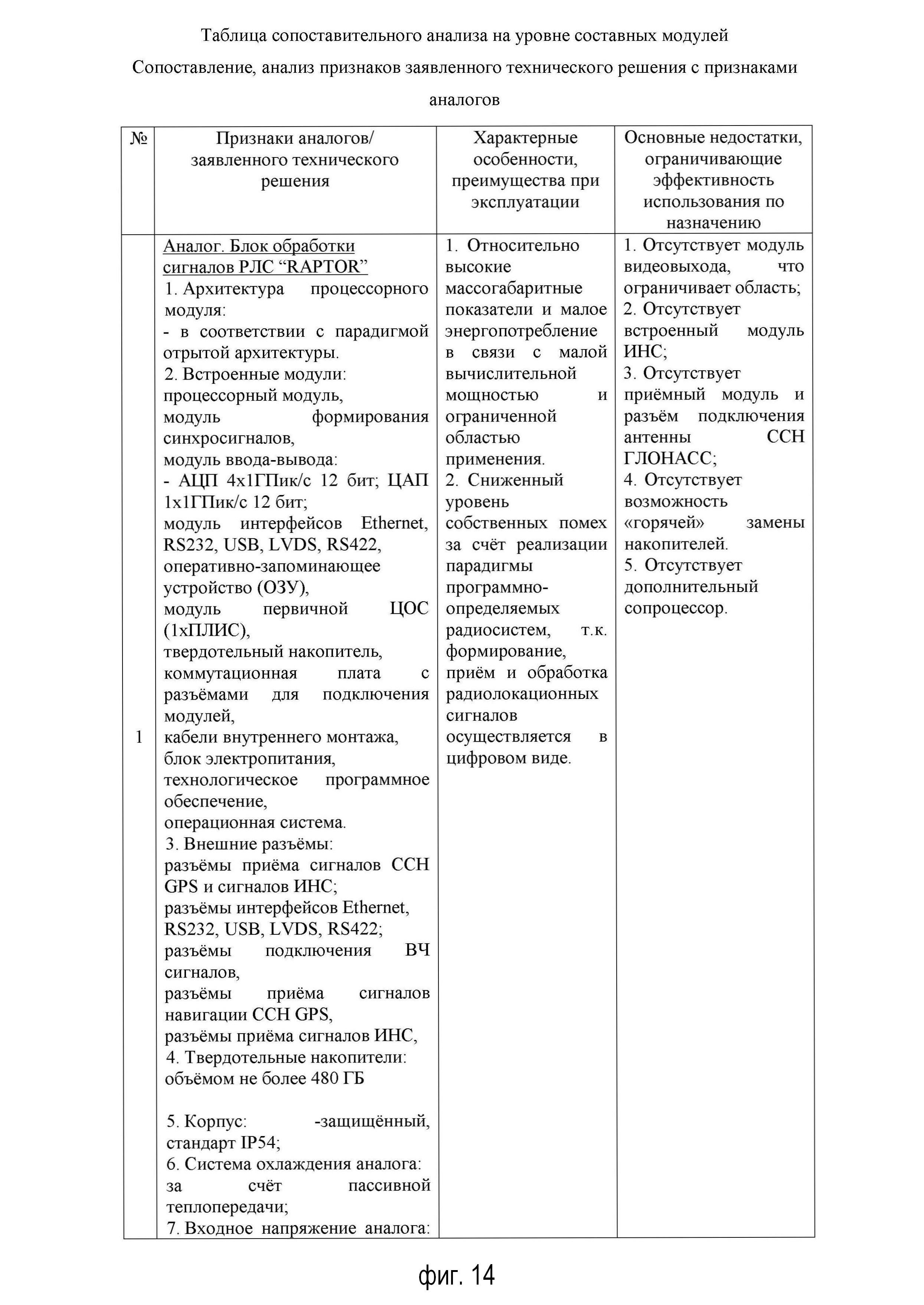
Из исследованного уровня техники выявлен блок ЦОС МРЛС “RAPTOR” [3].
Известный блок ЦОС [3], по мнению заявителя, не является запатентованным, однако является общедоступным в открытой печати материалом, анализ которого позволяет сделать вывод о его конструктивных особенностях и режимах работы. В составе известного блока имеется:
- процессорный модуль,
- модуль формирования синхросигналов,
- модуль ввода-вывода с цифро-аналоговым (ЦАП) и аналого-цифровым преобразователем (АЦП),
- модуль интерфейсов Ethernet, RS232, USB, LVDS, RS422,
- оперативно-запоминающее устройство (ОЗУ),
- модуль первичной ЦОС, реализованный с помощью, программируемой логической интегральной схемы (ПЛИС),
- твердотельный накопитель,
- коммутационная плата с разъёмами для подключения модулей,
- разъёмы приёма сигналов системы спутниковой навигации (ССН) GPS,
- разъёмы приёма сигналов инерциальных навигационных средств (ИНС),
- разъёмы передачи данных по интерфейсу Ethernet, RS232, USB, LVDS, RS422
- разъёмы подключения ВЧ сигналов,
- корпус,
- тумблер электропитания,
- защитное заземление,
- кабели внутреннего монтажа,
- блок электропитания,
- комплект монтажных частей,
- система охлаждения,
- технологическое программное обеспечение,
- операционная система.
Анализ особенностей конструкции и структурной схемы, выполненный заявителем, позволяет сделать вывод о решаемых известной системой задачах и её недостатках по сравнению с заявленным техническим решением.
Таким образом, при сравнении потребительских свойств известного блока ЦОС РСА “RAPTOR” с заявленным многоканальным аппаратно-программным комплексом (АПК) высокоскоростной цифровой обработки сигналов установлено, что потребительские свойства заявленного технического решения значительно превосходят технические характеристики известного аналога.
Так, например:
- заявленный многоканальный АПК высокоскоростной ЦОС имеет возможность подключения двух видеомониторов, тогда как известный блок ЦОС МРСА “RAPTOR” такой возможности не имеет. Таким образом, известный блок имеет более низкие потребительские свойства по сравнению с заявленным техническим решением;
- максимальный объём накопителей заявленного многоканального АПК высокоскоростной ЦОС составляет 16 терабайт (ТБ) (на дату представления заявленных материалов наибольшая емкость твердотельных накопителей стандарта 2.5” SATA составляет 8 терабайт (ТБ) Cactus technologies 250SH Series) против 1 терабайта (ТБ) у блока ЦОС МРСА “RAPTOR”. Таким образом, максимальный объём накопителей заявленного технического решения в 16 раз превосходит объём накопителей известного аналога;
- максимально возможная полоса пропускания сигналов известного блока составляет 800МГц, тогда как заявленный многоканальный АПК высокоскоростной ЦОС имеет полосу пропускания ВЧ сигналов, равную 1 гигагерц (ГГц), (на дату представления заявленных материалов указана полоса пропускания многоканальной ячейки ввода-вывода и ЦОС, в качестве которой применена ячейка ввода-вывода стандарта XMC
X6-1000M, Innovative-DSP), т.е. у заявленного технического решения полоса пропускания на 12% превосходит полосу пропускания известного аналога;
- заявленный многоканальный АПК высокоскоростной ЦОС оснащён сопроцессором, в качестве которого используется графическая карта (на дату представления заявленных материалов наиболее производительная графическая карта стандарта MXM-B имеет максимальную производительность 8 террафлопс на сек. (ТФлоп/с), выполненной в виде видеокарты M3N1080-NN), тогда как в известном аналоге модуль (блок) сопроцессора отсутствует, таким образом, оснащение указанным модулем заявленного технического решения обеспечивает максимально возможную производительность заявленного технического решения и, как следствие, обеспечивает существенные преимущества при использовании по назначению по сравнению с аналогом;
- заявленный многоканальный АПК высокоскоростной ЦОС оснащен приёмным модулем и разъёмом для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог имеет возможность приёма сигналов одной антенной и только ССН GPS. Таким образом, у аналога потенциально возможная точность определения местоположения носителя МРСА (МРЛС) существенно уступает точности позиционирования носителя заявленного технического решения, в силу чего, как следствие, у заявленного технического решения точность позиционирования наблюдаемой цели значительно выше, чем у аналога.
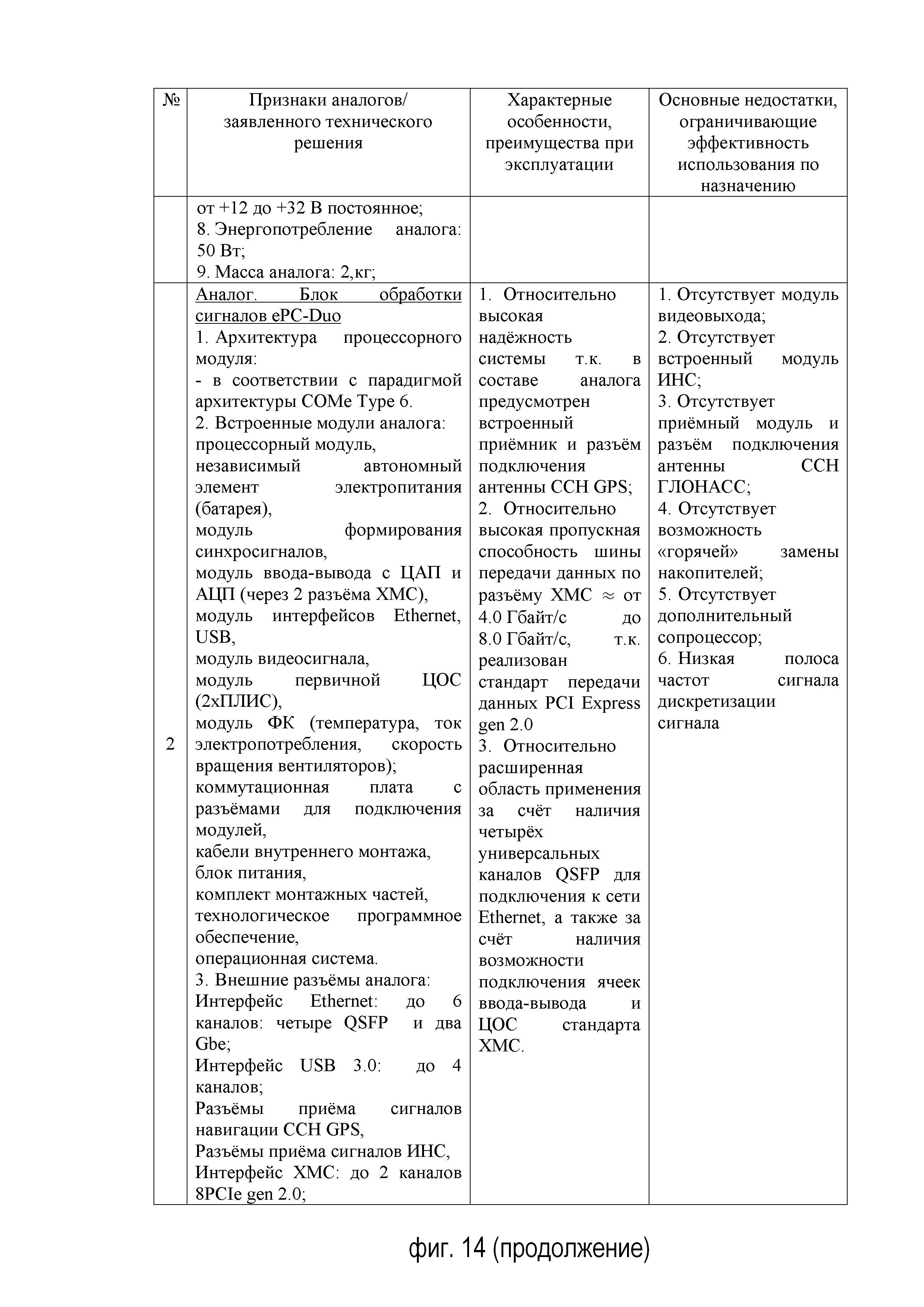
Из исследованного уровня техники выявлен блок ЦОС ePC-Duo [4].
Известный блок ЦОС, по мнению заявителя, не является запатентованным, но имеющийся в открытой печати материал позволяет сделать вывод о его конструктивных особенностях, представленных далее. В составе известного аналога имеется:
- процессорный модуль,
- независимый автономный элемент электропитания (батарея),
- модуль формирования синхросигналов,
- модуль ввода-вывода с ЦАП и АЦП,
- модуль интерфейсов Ethernet,
- модуль интерфейсов USB,
- модуль видеосигнала,
- ОЗУ,
- модуль функционального контроля (ФК) (температура, ток электропотребления, скорость вращения вентиляторов);
- модуль первичной ЦОС с ПЛИС,
- твердотельный накопитель,
- коммутационная плата с разъёмами для подключения модулей,
- разъёмы приёма сигналов ССН GPS,
- разъёмы приёма сигналов ИНС,
- разъёмы передачи данных по интерфейсу Ethernet,
- разъёмы передачи данных по интерфейсу USB,
- разъёмы подключения ВЧ сигналов,
- корпус,
- кабели внутреннего монтажа,
- разъёмы подключения кабелей внешних твердотельных накопителей,
- блок питания,
- комплект монтажных частей,
- система охлаждения,
- технологическое программное обеспечение,
- операционная система.
При сравнении потребительских свойств известного блока ЦОС ePC-Duo с заявленным многоканальным АПК высокоскоростной ЦОС установлено, что потребительские свойства заявленного технического решения значительно превосходят известный аналог.
Так, например:
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог имеет возможность приёма сигналов одной антенной ССН GPS. Т.е. у известного блока потенциально возможная точность определения местоположения носителя МРСА (МРЛС) существенно уступает заявленному, в силу чего, как следствие, у заявленного технического решения точность позиционирования цели значительно выше, чем у аналога;
- общий объём накопителей заявленного многоканального АПК высокоскоростной ЦОС составляет 16 терабайт (ТБ) против 4 терабайт (ТБ) у известного блока, т. е. общий объём накопителей заявленного технического решения в 4 раза превышает объём накопителей у известного аналога (на дату представления заявленных материалов, наибольшая емкость твердотельных накопителей стандарта 2.5” SATA составляет 8 терабайт (ТБ), Cactus technologies 250SH Series);
- заявленный многоканальный АПК высокоскоростной ЦОС оснащён сопроцессором, в качестве которого используется графическая карта (на дату представления заявленных материалов наиболее производительная графическая карта стандарта MXM-B имеет максимальную производительность 8 террафлопс на сек. (ТФлоп/с), выполненной в виде видеокарты M3N1080-NN, Aetina), тогда как в известном аналоге модуль (блок) сопроцессора отсутствует. Таким образом, оснащение указанной картой заявленного технического решения обеспечивает максимально возможную производительность заявленного технического решения и как следствие обеспечивает существенные преимущества при использовании по назначению по сравнению с аналогом;
Из исследованного уровня техники выявлен блок ЦОС Mini-K7 [5]. Известный блок ЦОС, по мнению заявителя, не является запатентованным, но имеющийся в открытой печати материал позволяет сделать вывод о его конструктивных особенностях, представленных далее. В составе известного аналога имеется:
- процессорный модуль,
- независимый автономный элемент электропитания (батарея),
- модуль формирования синхросигналов,
- модуль интерфейсов Ethernet,
- модуль интерфейсов USB,
- модуль видеосигнала,
- ОЗУ,
- модуль первичной ЦОС с ПЛИС,
- твердотельный накопитель,
- коммутационная плата с разъёмами подключения модулей,
- разъёмы приёма сигналов ССН GPS,
- разъёмы приёма сигналов ИНС,
- разъёмы передачи данных по интерфейсу Ethernet,
- разъёмы передачи данных по интерфейсу USB,
- разъёмы подключения ВЧ сигналов (2 разъёма ХМС для подключения ячеек ввода-вывода),
- модуль функционального контроля (ФК) (температура, ток электропотребления, скорость вращения вентиляторов);
- корпус,
- кабели внутреннего монтажа,
- блок питания,
- комплект монтажных частей,
- система охлаждения,
- технологическое программное обеспечение,
- операционная система.
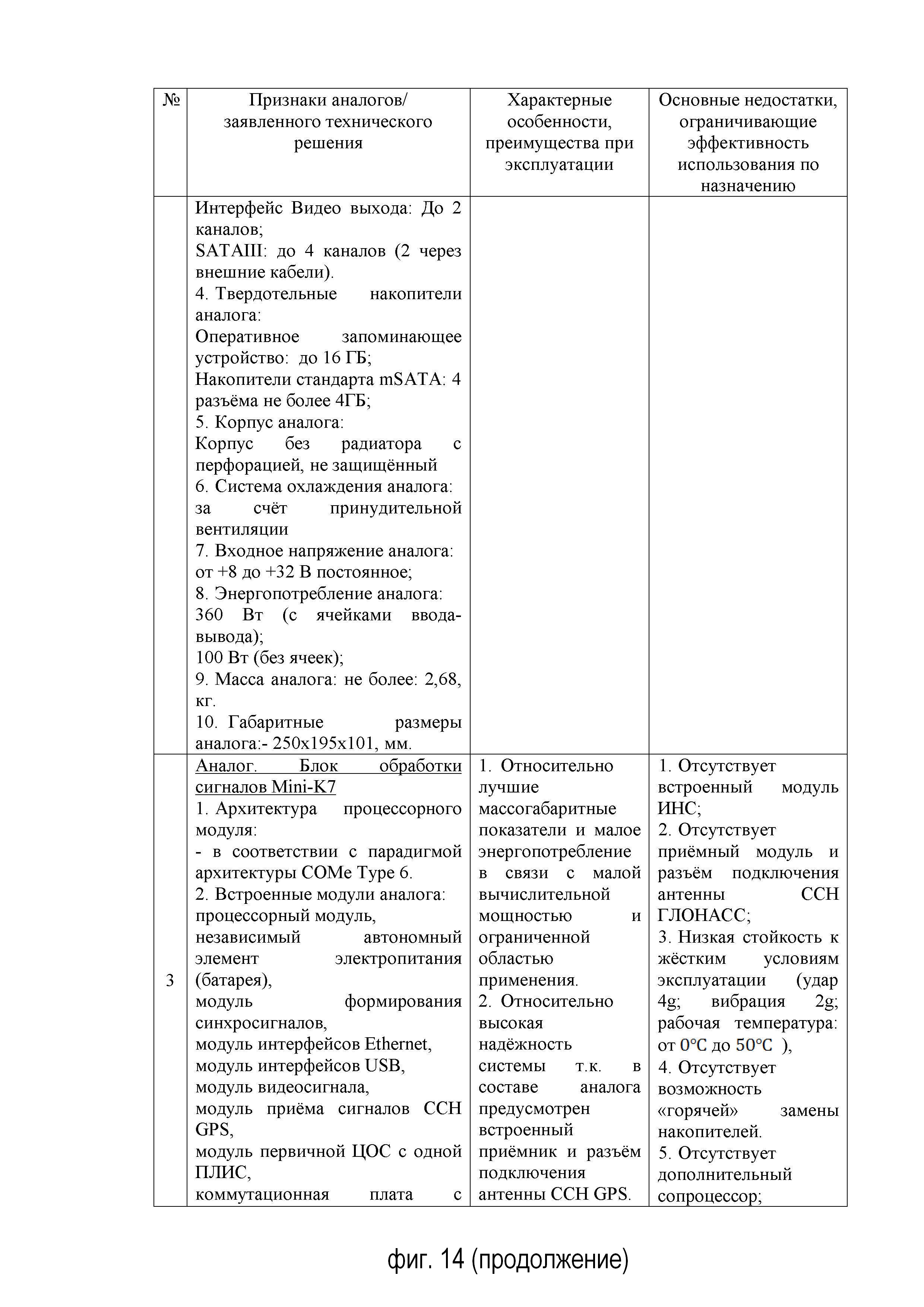
При сравнении потребительских свойств известного блока ЦОС Mini-K7 с заявленным многоканальным АПК высокоскоростной ЦОС установлено, что потребительские свойства заявленного технического решения значительно превосходят известный аналог.
Так, например:
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог имеет возможность приёма одной антенной и только сигналов ССН GPS, т.е. у известного блока потенциально возможная точность определения местоположения носителя МРСА (МРЛС) существенно уступает заявленному, в силу чего, как следствие, у заявленного технического решения точность позиционирования наблюдаемой цели значительно выше, чем у аналога;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет возможность подключения двух мезонинных плат ввода-вывода, на момент подачи заявки обеспечивающих возможность применения двух ПЛИС совместно с двумя АЦП и двумя ЦАП через разъём XMC (на дату представления заявленных материалов, указана полоса пропускания многоканальной ячейки ввода-вывода и ЦОС, в качестве которой используется ячейка ввода-вывода стандарта XMC X6-1000M, Innovative-DSP), тогда как известный аналог имеет возможность подключения к имеющейся ПЛИС одной мезонинной платы стандарта FMC с одним АЦП и одним ЦАП. Т.е., имея большую пропускную способность (в соответствии с известными характеристиками разъёма стандарта FMC), известный аналог имеет меньшее количество АЦП, ЦАП и ПЛИС, в силу чего, как следствие, заявленное техническое решение по сравнению с известным аналогом имеет большую потенциальную вычислительную мощность и количество независимых каналов ввода-вывода ВЧ сигналов;
- заявленный многоканальный АПК высокоскоростной ЦОС оснащён сопроцессором, в качестве которого используется графическая карта (на дату представления заявленных материалов наиболее производительная графическая карта стандарта MXM-B имеет максимальную производительность 8 террафлопс на сек. (ТФлоп/с), выполненной в виде видеокарты M3N1080-NN, Aetina), тогда как в известном аналоге модуль (блок) сопроцессора отсутствует. Таким образом, оснащение указанной картой заявленного технического решения обеспечивает максимально возможную производительность заявленного технического решения и, как следствие, обеспечивает существенные преимущества при использовании по назначению по сравнению с аналогом.
Известен блок ЦОС «Radar Digital Signal Processing System» [6]. Известный аналог не является запатентованным, но имеющийся в открытой печати материал позволяет сделать вывод о его конструктивных особенностях, представленных далее.
В составе известного блока имеется:
- процессорный модуль,
- модуль формирования синхросигналов,
- модуль интерфейсов Ethernet,
- модуль интерфейсов USB,
- модуль интерфейсов RS422
- модуль видеосигнала,
- ОЗУ,
- модуль первичной ЦОС с ПЛИС,
- модуль интерфейсов МКИО РИО,
- твердотельный накопитель,
- коммутационная плата с разъёмами подключения модулей,
- разъёмы приёма сигналов ССН GPS,
- разъёмы приёма сигналов ИНС,
- разъёмы передачи данных по интерфейсу Ethernet,
- разъёмы передачи данных по интерфейсу USB,
- разъёмы передачи данных по интерфейсу RS422,
- разъёмы передачи данных по интерфейсу МКИО РИО,
- разъёмы подключения ВЧ сигналов (АЦП 4х250MПик/с, ЦАП 4х250MПик/с 14 бит;)
- корпус,
- кабели внутреннего монтажа,
- блок питания,
- комплект монтажных частей,
- система охлаждения,
- технологическое программное обеспечение,
- операционная система.
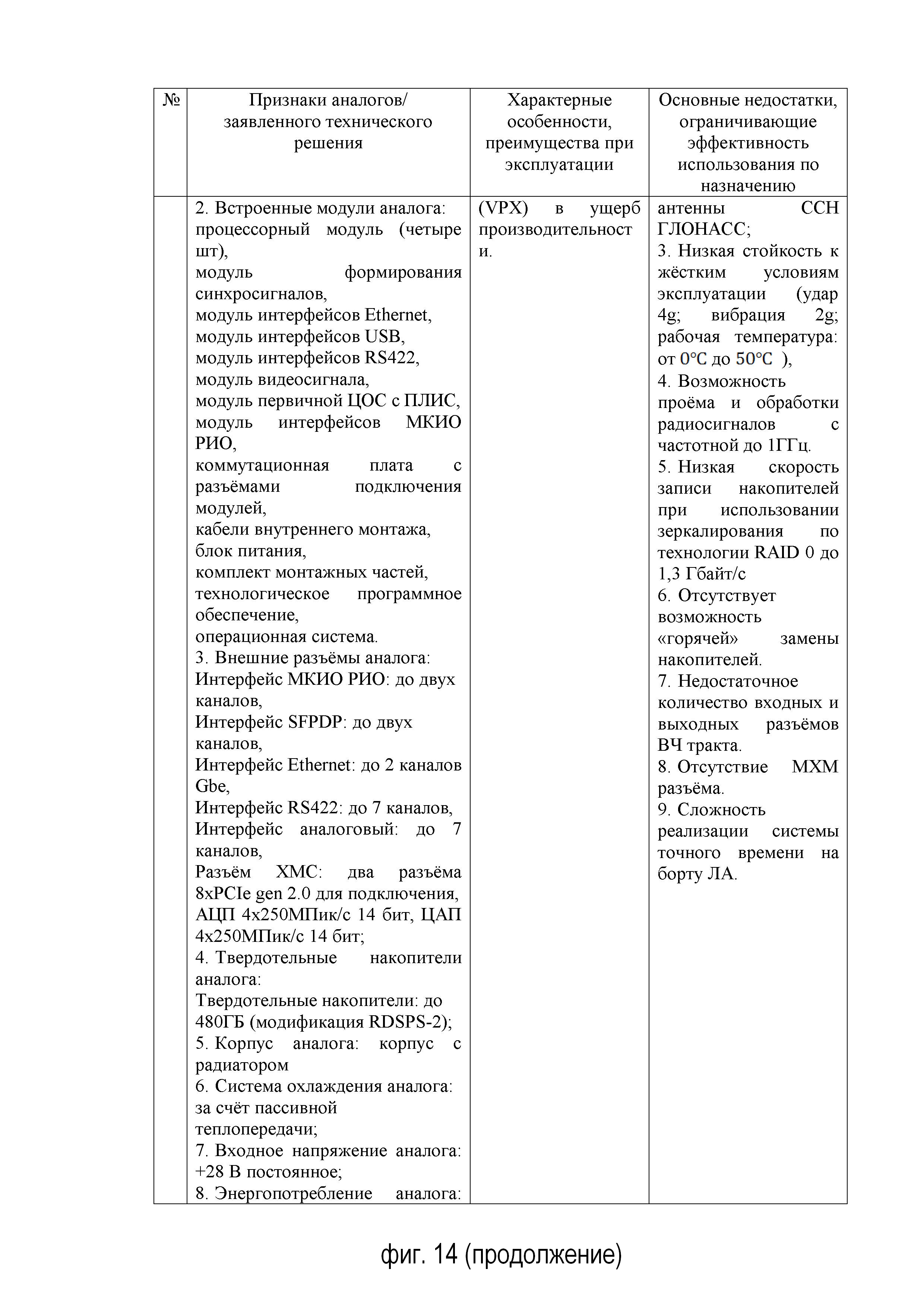
При сравнении потребительских свойств известного блока ЦОС Radar Digital Signal Processing System с заявленным многоканальным АПК высокоскоростной ЦОС установлено, что потребительские свойства заявленного технического решения значительно превосходят известный аналог.
Так, например:
- заявленный многоканальный АПК высокоскоростной ЦОС оснащён сопроцессором, в качестве которого используется графическая карта (на дату представления заявленных материалов наиболее производительная графическая карта стандарта MXM-B имеет максимальную производительность 8 террафлопс на сек. (ТФлоп/с), выполненной в виде видеокарты M3N1080-NN, Aetina), тогда как в известном аналоге модуль (блок) сопроцессора отсутствует. Таким образом, оснащение указанной картой заявленного технического решения обеспечивает максимально возможную производительность заявленного технического решения и, как следствие, обеспечивает существенные преимущества при использовании по назначению по сравнению с аналогом;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог имеет возможность приёма сигналов одной антенной и только сигналов ССН GPS. Т.е. у известного блока потенциально возможная точность определения местоположения носителя МРСА (МРЛС) существенно уступает заявленному, в силу чего, как следствие, у заявленного технического решения точность позиционирования цели значительно выше, чем у аналога;
- заявленный многоканальный АПК высокоскоростной ЦОС на момент подачи заявки имеет возможность формирования сигналов с частотой дискретизации 1000 МПик/сек против 240МПик/сек у известного аналога, т.е. у заявленного технического решения полоса формируемых сигналов в четыре раза шире известного аналога (на дату подачи заявки в качестве многоканальной ячейки ввода-вывода и ЦОС используется ячейка ввода-вывода стандарта XMC X6-1000M, Innovative-DSP);
- заявленный многоканальный АПК высокоскоростной ЦОС на момент подачи заявки имеет возможность приёма сигналов с частотой дискретизации 1000 МПик/сек против 250МПик/сек у известного аналога, т.е. заявленное техническое решение имеет возможность приёма ВЧ сигналов с полосой в два раза шире, чем у известного аналога (на дату подачи заявки в качестве многоканальной ячейки ввода-вывода и ЦОС используется ячейка ввода-вывода стандарта XMC X6-1000M, Innovative-DSP).
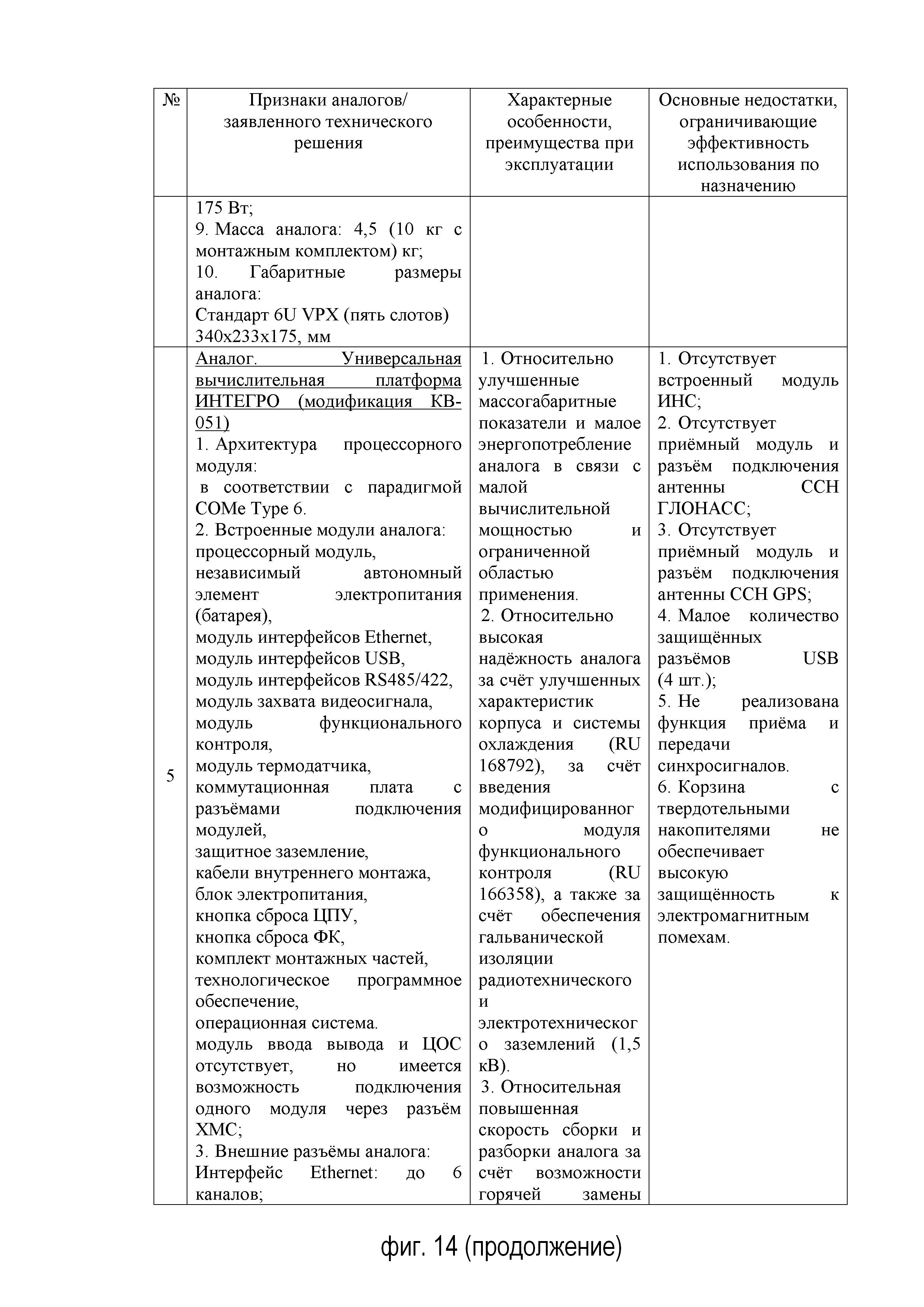
Известна модификация универсальной вычислительной платформы УВП ИНТЕГРО (ЛКЖТ.466259.024ТУ) - КВ-051 [7]. Одна из модификаций упомянутого выше устройства защищена патентом РФ на полезную модель RU 168792.
В составе известного блока имеется:
- процессорный модуль,
- независимый автономный элемент электропитания (батарея),
- модуль интерфейсов Ethernet,
- модуль интерфейсов USB,
- модуль интерфейсов RS422/485,
- модуль захвата видеосигнала,
- модуль функционального контроля,
- ОЗУ,
- твердотельный накопитель,
- коммутационная плата с разъёмами подключения модулей,
- разъёмы передачи данных по интерфейсу Ethernet,
- разъёмы передачи данных по интерфейсу USB,
- разъёмы передачи данных по интерфейсу RS422/485,
- корпус,
- защитное заземление,
- кабели внутреннего монтажа,
- блок электропитания,
- кнопка сброса центрального процессора (ЦПУ),
- кнопка сброса процессорного модуля функционального контроля (ФК),
- комплект монтажных частей,
- система охлаждения,
- технологическое программное обеспечение,
- операционная система.
При сравнении потребительских свойств известной аналога с заявленным техническим решением установлено, что потребительские свойства заявленного технического решения значительно превосходят известный аналог.
Так, например:
- заявленный многоканальный АПК высокоскоростной ЦОС оснащён встроенным модулем ИНС, а у известного аналога для реализации функций МРСА может быть применён внешний ИНС, размещённый в отдельном корпусе, соединённый внешними кабелями с основным блоком через соответствующий разъём, что приводит к увеличению массогабаритных характеристик, снижению надёжности системы в целом и увеличению времени сборки изделия;
- в отличие от заявленного многоканального АПК высокоскоростной ЦОС известный аналог не обладает возможностью приёма ВЧ сигналов по четырём независимым каналам с полосой не менее 1 ГГц без использования дополнительных средств синхронизации, таким образом, известный аналог не имеет возможности реализации функций режимов МРСА (МРЛС), без использования дополнительных устройств;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет возможность приема и передачи сигналов по двум дополнительным каналам интерфейса МКИО РИО, тогда как известный аналог такой возможности не имеет;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет шесть защищённых внешних разъёмов интерфейса передачи данных USB 3.0, против четырёх разъёмов у известного аналога, т.е. заявленный многоканальный АПК высокоскоростной ЦОС обладает более широкими функциональными возможностями;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог такой возможность не имеет, т.е. известный аналог не обеспечивает функционирование режимов работы МРСА (МРЛС) без применения дополнительных устройств;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет возможность приёма и передачи до одиннадцати ВЧ синхросигналов, тогда как известный аналог такой функции не имеет, т.е. известный аналог не обеспечивает функционирование режимов работы МРСА (МРЛС) без применения дополнительных устройств;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет защищённую герметичную корзину хранения внешних твердотельных накопителей, тогда как у известного аналога корзина хранения внешних твердотельных накопителей имеет перфорацию (на момент подачи материалов), таким образом, заявленное техническое решение обеспечивает надежное хранение данных в отличие от известного аналога.
- заявленный многоканальный АПК высокоскоростной ЦОС на момент подачи материалов заявки имеет скорость передачи данных по двум разъёмам XMC и разъёму МХМ-В не менее 8хPCI Express 3.0 благодаря внедрения коммутатора шины PCI Express PEX-8696 PLX Technology (см. Фиг. 6 конфигурацию А), тогда как известный аналог по данным разъёмам имеет скорость передачи 4хPCI Express 3.0 и 8хPCI Express 3.0, соответственно, т.е. пропускная способность заявленного технического решения в два раза выше. Следует также отметить, что коммутатор шины PCI Express позволяет увеличить пропускную способность разъёмов, на момент подачи заявки до 16хPCI Express 3.0, т.е. в 4 раза выше, чем у известного аналога.
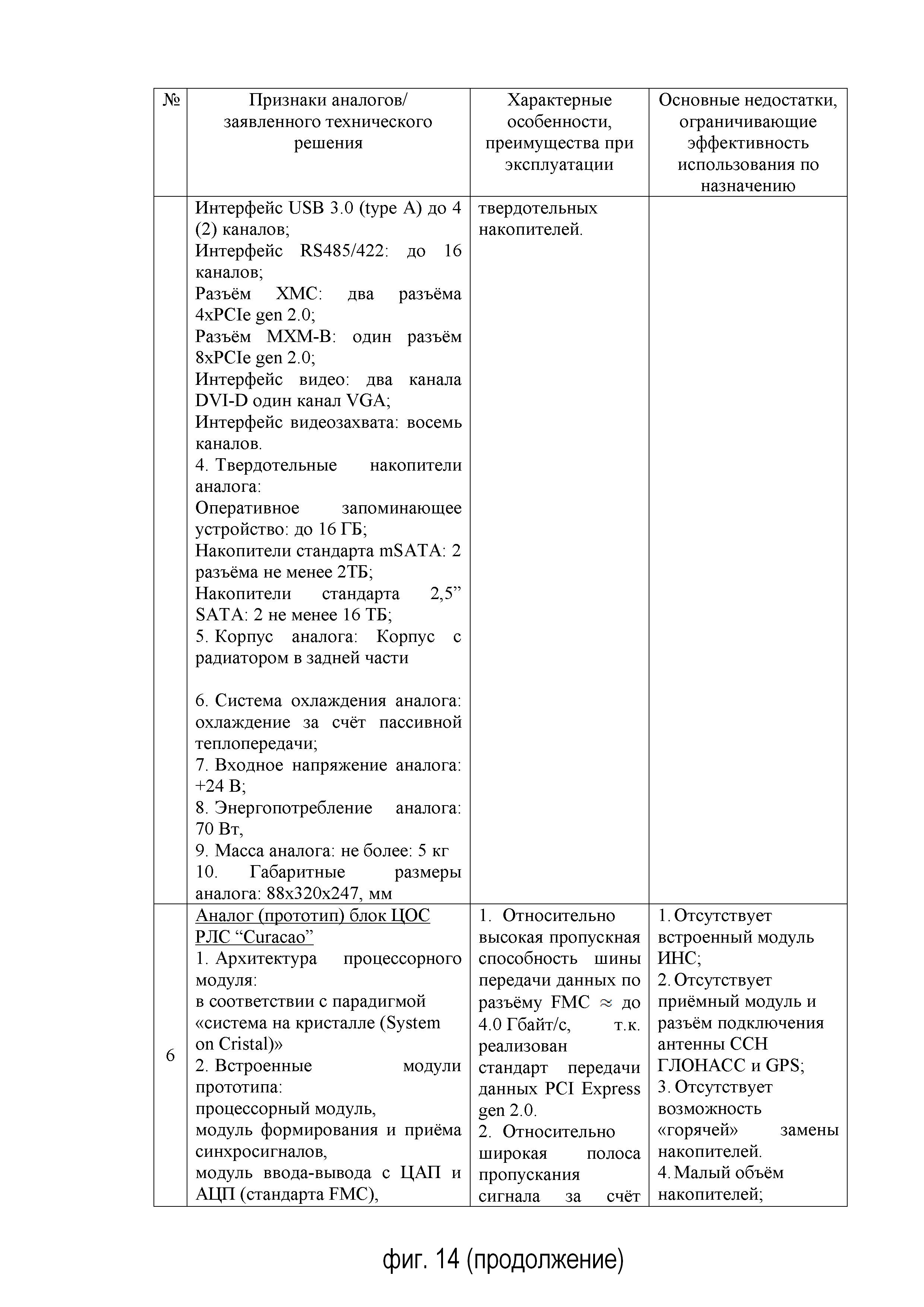
Из исследованного заявителем уровня техники выявлен вычислительный блок радиолокатора синтезированной апертуры CURACAO, выбранный заявителем в качестве прототипа как совпадающего с заявленным техническим решением наибольшим количеством совпадающих признаков и назначением. CURACAO – компактная радиолокационная станция с активной фазированной антенной решеткой (АФАР)
Х-диапазона [8], имеющая возможность выполнения функций картографирования и идентификации движущихся целей, основой которой (системы) является вычислительный блок ЦОС МРСА, ВЧ тракт МРСА и АФАР. Вычислительный блок ЦОС МРСА известной системы, по мнению заявителя, не является запатентованным, однако доступная в открытой печати информация позволяет сделать вывод о его конструктивных особенностях, схемах электрического подключения и аппаратного оснащения.
Анализ известного блока ЦОС МРСА CURACAO показал, что анализируемый прототип содержит:
- процессорный модуль,
- модуль формирования и приёма синхросигналов,
- модуль ввода-вывода с ЦАП и АЦП,
- ОЗУ,
- модуль первичной ЦОС, реализованный на ПЛИС,
- твердотельный накопитель,
- коммутационная плата с соответствующими разъёмами, позволяющими подключить модули,
- независимый автономный элемент электропитания (батарея),
- разъёмы приёма сигналов ССН GPS,
- разъёмы приёма сигналов позиционирования от внешней ИНС,
- разъёмы передачи данных по интерфейсу Ethernet,
- разъёмы подключения ВЧ сигналов,
- корпус,
- тумблер электропитания,
- защитное заземление,
- кабели внутреннего монтажа,
- блок электропитания,
- комплект монтажных частей,
- систему охлаждения,
- технологическое программное обеспечение,
- операционную систему.
При сравнении потребительских свойств вычислительного блока ЦОС известной системы CURACAO с заявленным техническим решением установлено, что потребительские свойства заявленного многоканального аппаратно-программного комплекса цифровой обработки сигналов значительно превосходят известное техническое решение по следующим параметрам или потребительским свойствам:
- заявленный многоканальный аппаратно-программный комплекс имеет возможность подключения двух видеомониторов, тогда как вычислительный блок ЦОС известной системы CURACAO такой возможности не имеет, т.е. известный блок обладает пониженными качественными характеристиками по сравнению с заявленным техническим решением;
- масса заявленного многоканального АПК высокоскоростной ЦОС равна 5 кг против 9 кг у вычислительного блока ЦОС известной системы CURACAO, т. е. заявленное техническое решение в 1,8 раза легче известного;
- объём накопителей заявленного АПК высокоскоростной ЦОС составляет 16 ТБ против 2 ТБ у вычислительного блока ЦОС известной системы CURACAO, т. е. объём накопителей заявленного технического решения в 8 раза больше известного (на дату представления заявленных материалов, наибольшая емкость твердотельных накопителей стандарта 2.5” SATA составляет 8 терабайт (ТБ), Cactus technologies 250SH Series);
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог имеет возможность приёма сигналов только одной антенной ССН GPS. Т.е. у известного блока потенциально возможная точность определения местоположения носителя МРСА (МРЛС) существенно уступает заявленному, в силу чего, как следствие, у заявленного технического решения точность позиционирования цели значительно выше, чем у аналога;
- заявленный многоканальный АПК высокоскоростной ЦОС имеет приёмный модуль и разъём для подключения двух антенн ССН ГЛОНАСС/GPS/Galileo, тогда как известный аналог такой возможности не имеет. Таким образом, известный аналог не обеспечивает функционирование режимов работы МРСА (МРЛС) без применения дополнительных устройств;
- занимаемый объём заявленным многоканальным АПК высокоскоростной ЦОС равен 13,1 дм3 против 27 дм3 у вычислительного блока ЦОС известной системы CURACAO, т. е. занимаемый заявленным техническим решением объём в 2 раза меньше известного;
- заявленный многоканальный АПК высокоскоростной ЦОС обладает возможностью единовременной реализации режимов работы МРСА и РЛПД, тогда как известный прототип такой возможности не имеет, т.е. известный прототип не обеспечивает передачу полученных данных на пункт управления МРСА;
- энергопотребление заявленного многоканального АПК высокоскоростной ЦОС на момент подачи заявки не превышает 300 Вт, тогда как энергопотребление имеющегося аналога на момент подачи заявки составляет 500 Вт, т.е. энергопотребление заявленного технического решения почти в два раза ниже, чем у известного прототипа.
Заявленное техническое решение иллюстрируется Фиг. 1 – Фиг. 12:
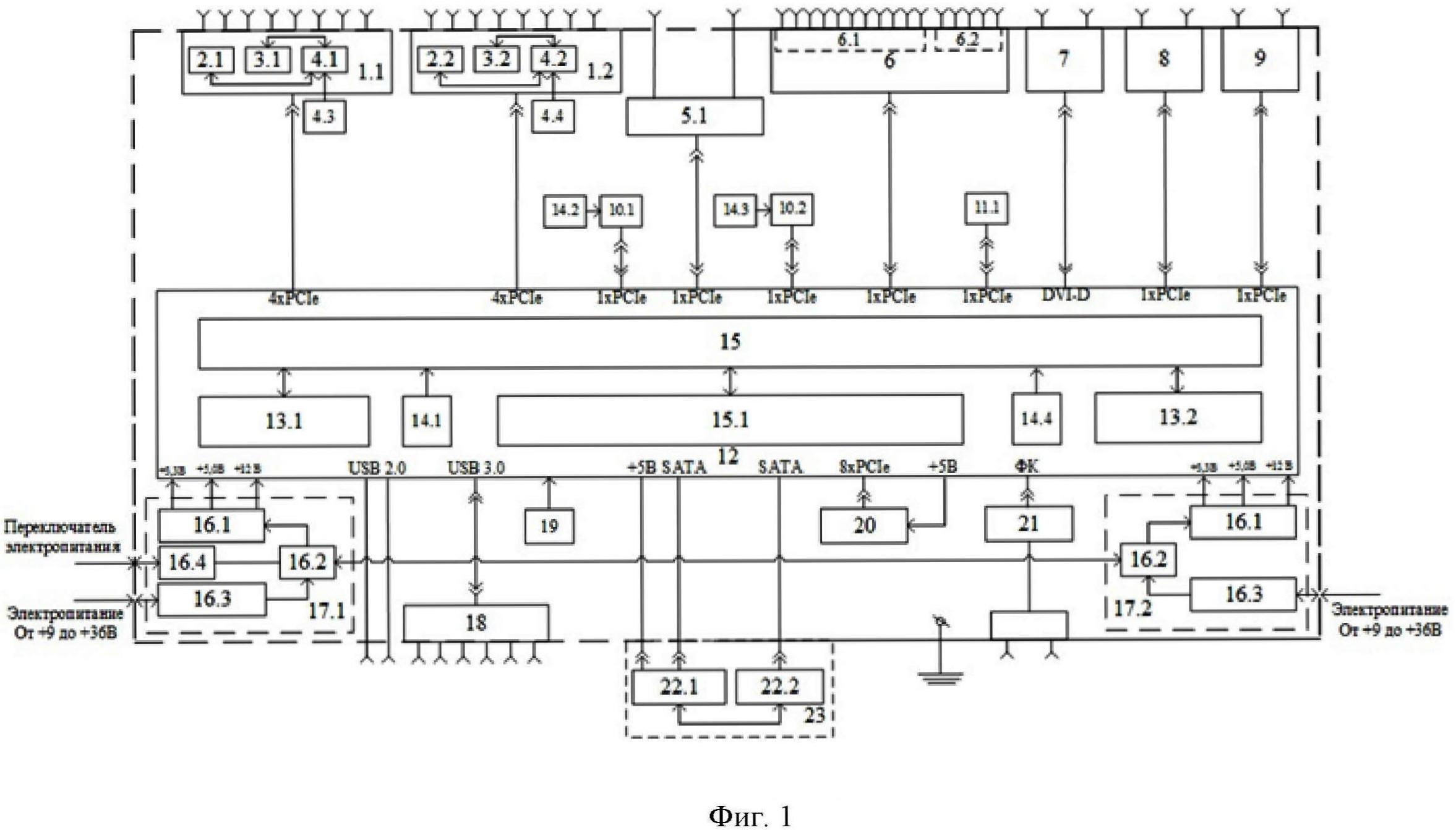
На Фиг. 1 представлена структурная схема заявленного технического решения.
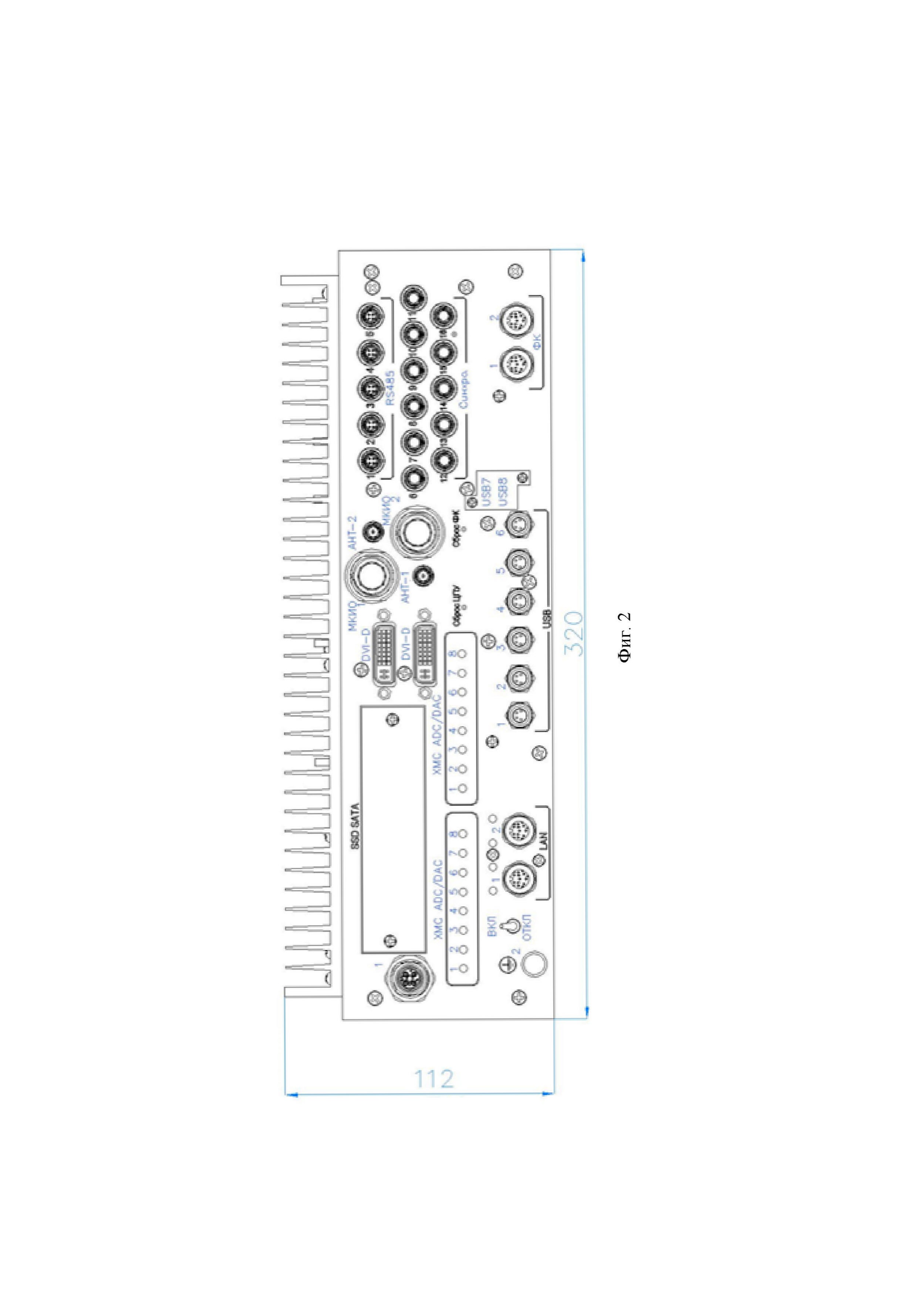
На Фиг. 2 представлен внешний вид заявленного технического решения (вид спереди).
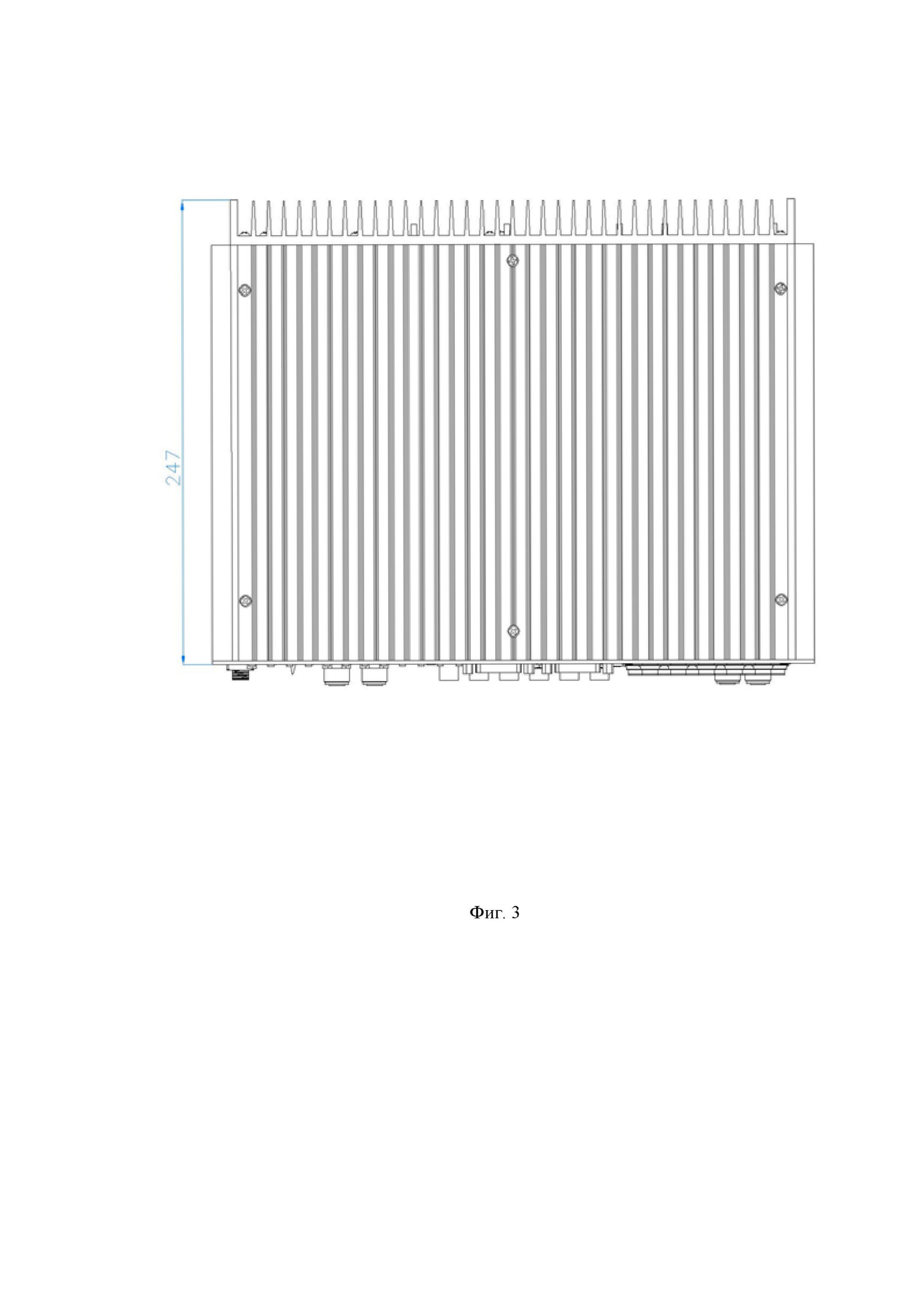
На Фиг. 3 представлен внешний вид заявленного технического решения (вид сверху).
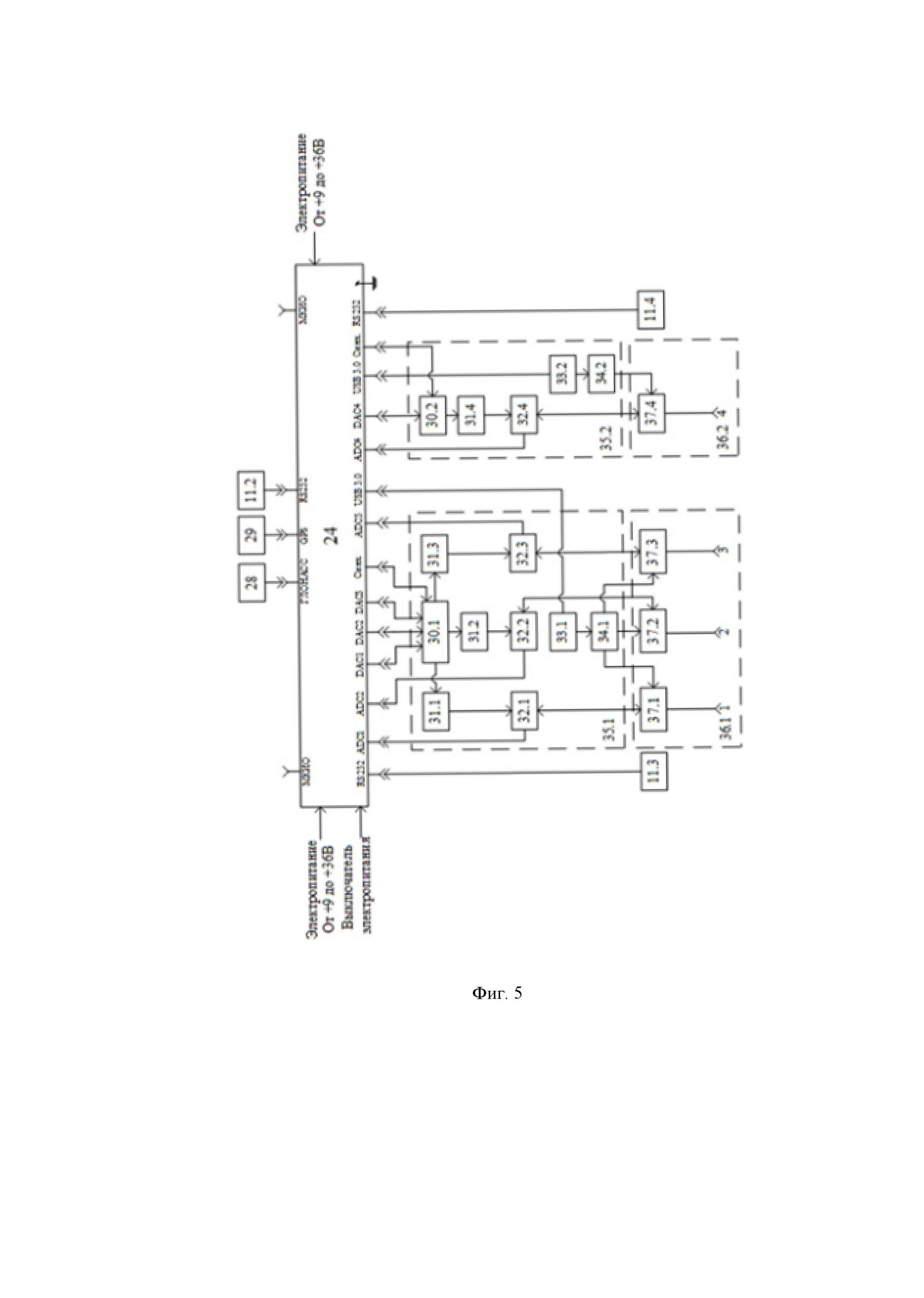
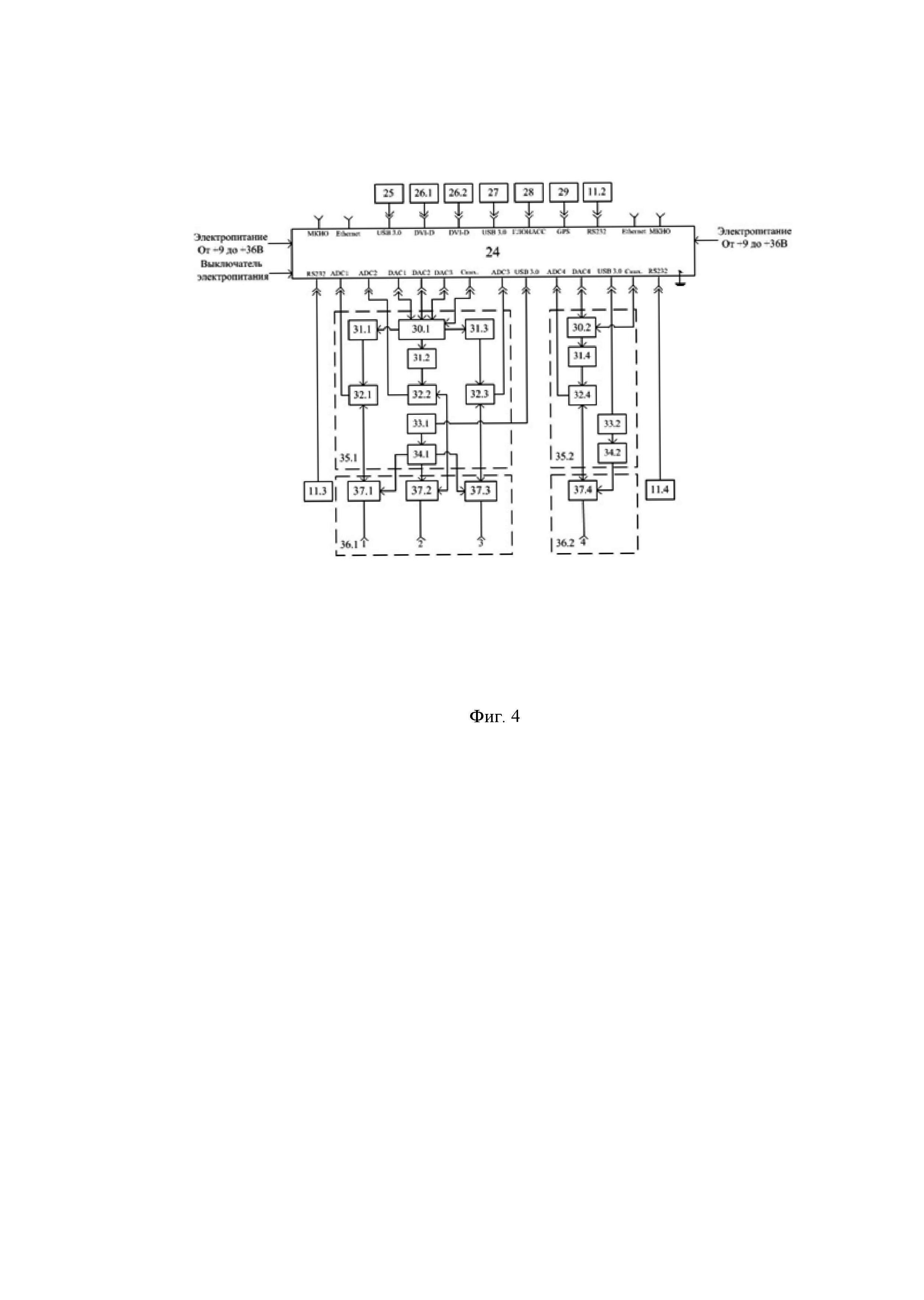
На Фиг. 4 и Фиг. 5 представлены варианты использования заявленного технического решения на борту пилотируемого и беспилотного летательного аппарата (ЛА), соответственно.
На Фиг. 6 представлены возможные варианты конфигурации шины передачи данных заявленного технического решения (возможные варианты модификации), на дату подачи заявки в качестве коммутатора шины применён PEX-8696 PLX Technology.
На Фиг. 7 представлено изображение модуля X6-1000M, который на дату подачи заявки использован в качестве мезонинной ячейки многоканального ввода-вывода и ЦОС (плата, вставляемая в основную плату (носитель) и располагающаяся параллельно плате-носителю).
На Фиг. 8 представлено изображение ИНС STIM300, которое на дату подачи заявки использовано в качестве малогабаритной и высокостабильной встроенной ИНС.
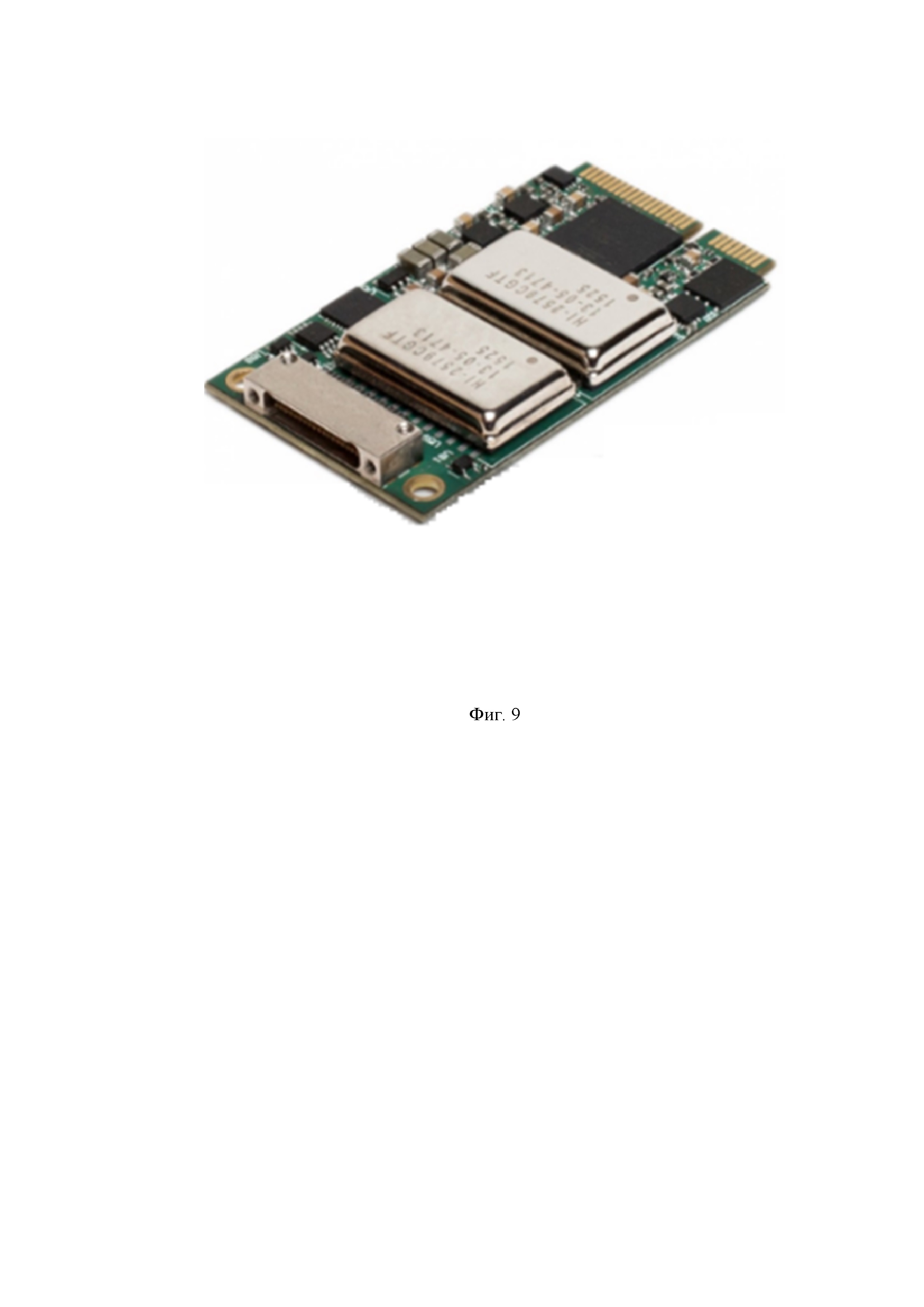
На Фиг. 9 представлено изображение модуля Mini-PCI-Express-Mil-STD_1553, который на дату подачи заявки использован в качестве модуля интерфейса МКИО РИО.
На Фиг. 10 приведено изображение модуля Mini-PCI-Express-Gigabit-Ethernet-10-100-1000-BASE-T, который на дату подачи заявки использован в качестве модуля интерфейсов Ethernet.
На Фиг. 11 приведено изображение модуля NV08C-CSM, который на дату подачи заявки использован для приёма и комплексирования сигналов с двумя антеннами глобальной спутниковой навигации GPS/ГЛОНАСС/Galileo,
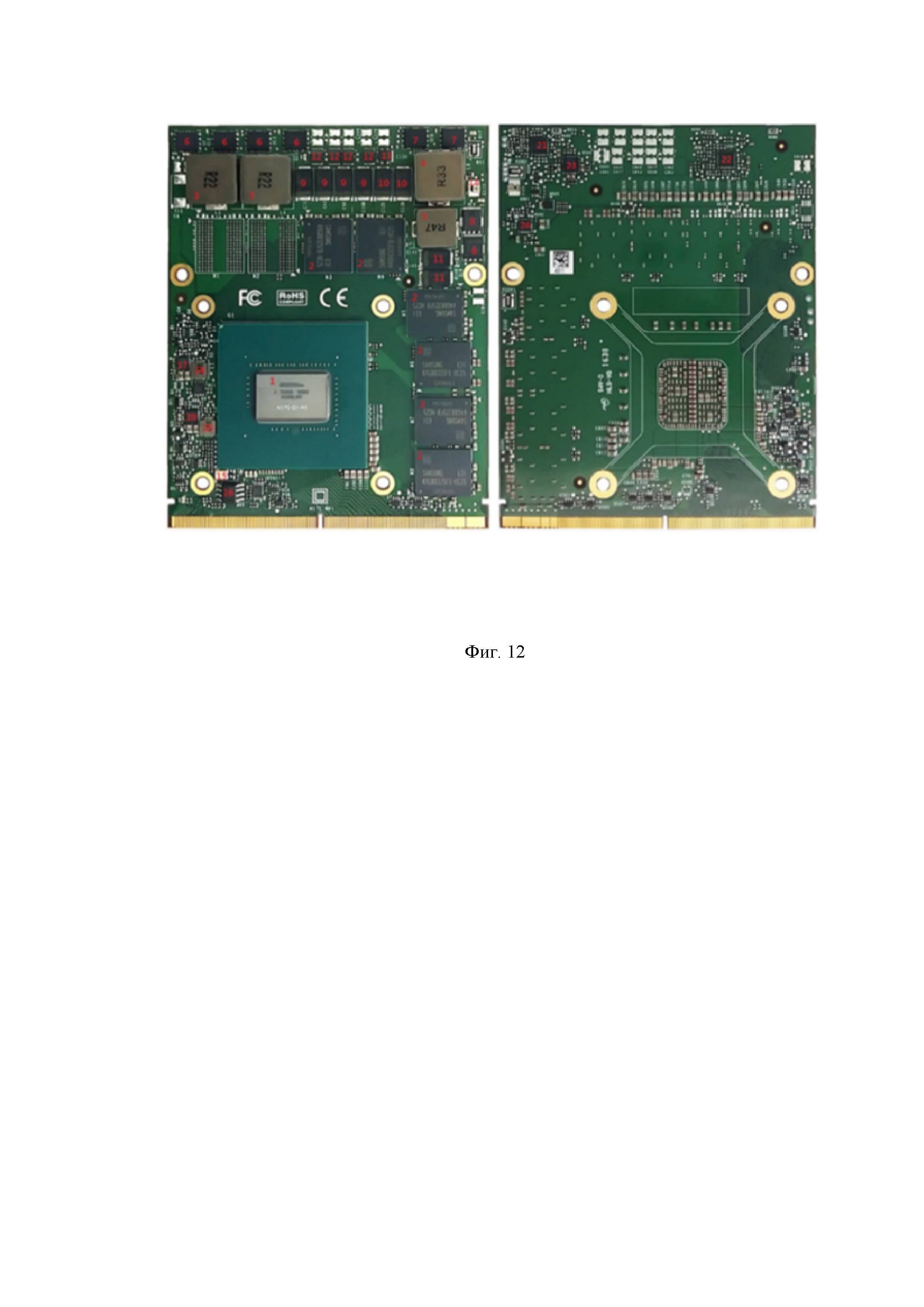
На Фиг. 12 приведено изображение модуля 1080-MN MXM-В, который на дату подачи заявки использован в качестве сопроцессора,
На Фиг. 13 приведено изображение модуля Intel Core i7 архитектуры COM Express, который на дату подачи заявки использован в качестве процессорного модуля.
Остальные составные элементы конструкции заявленного технического решения могут быть реализованы с использованием общеизвестных типовых решений отечественного производства, например, из состава УВП ИНТЕГРО [7].
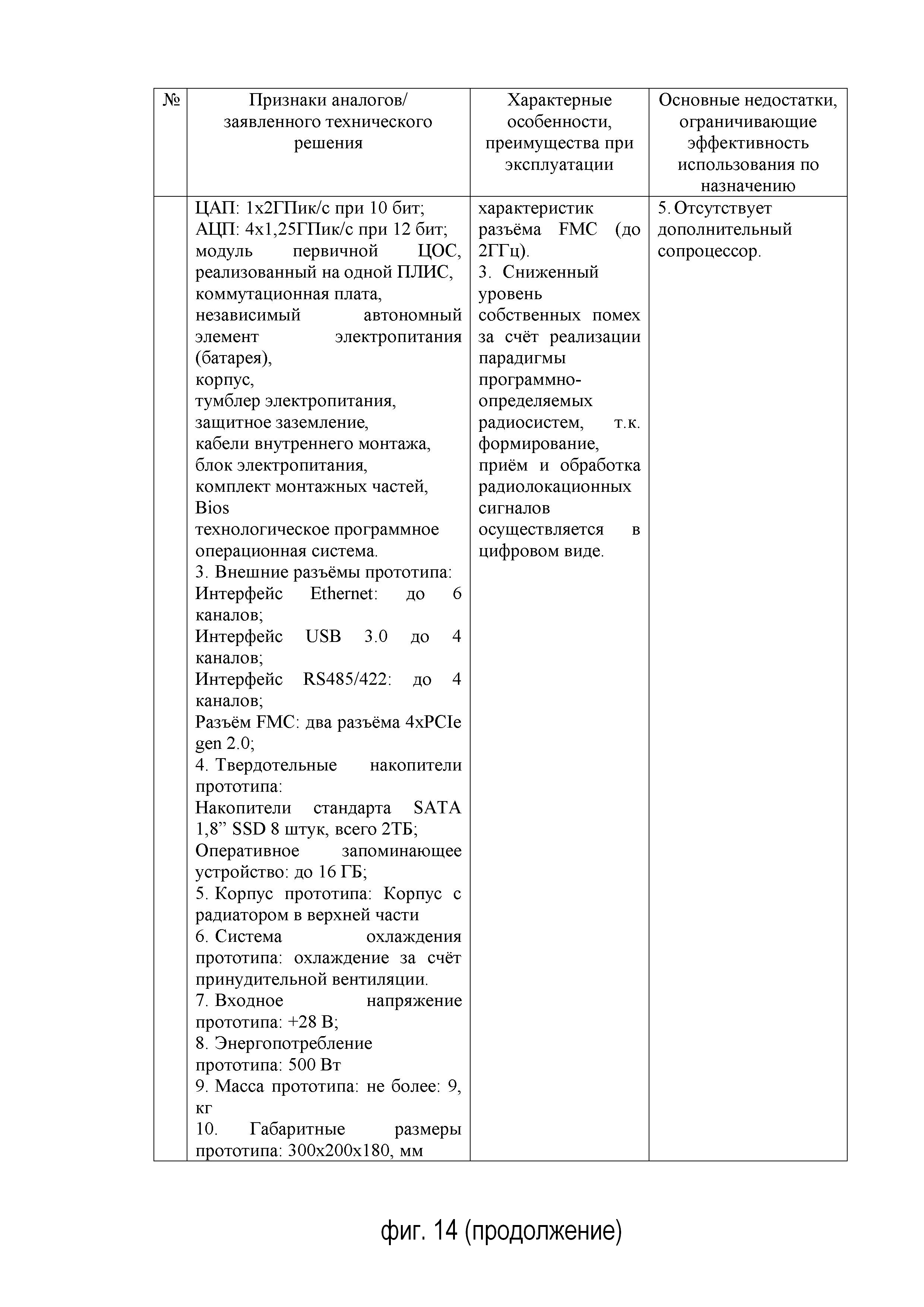
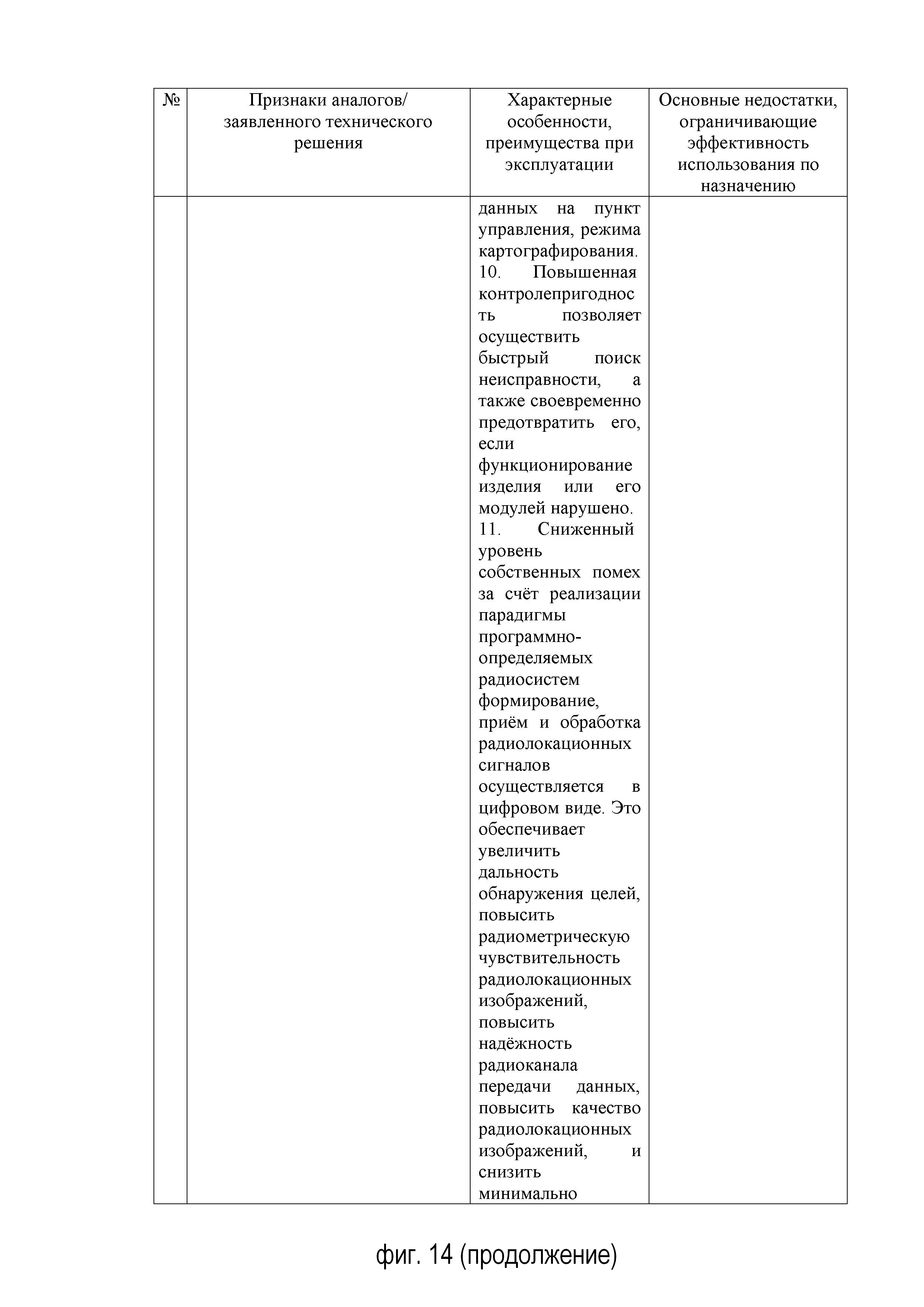
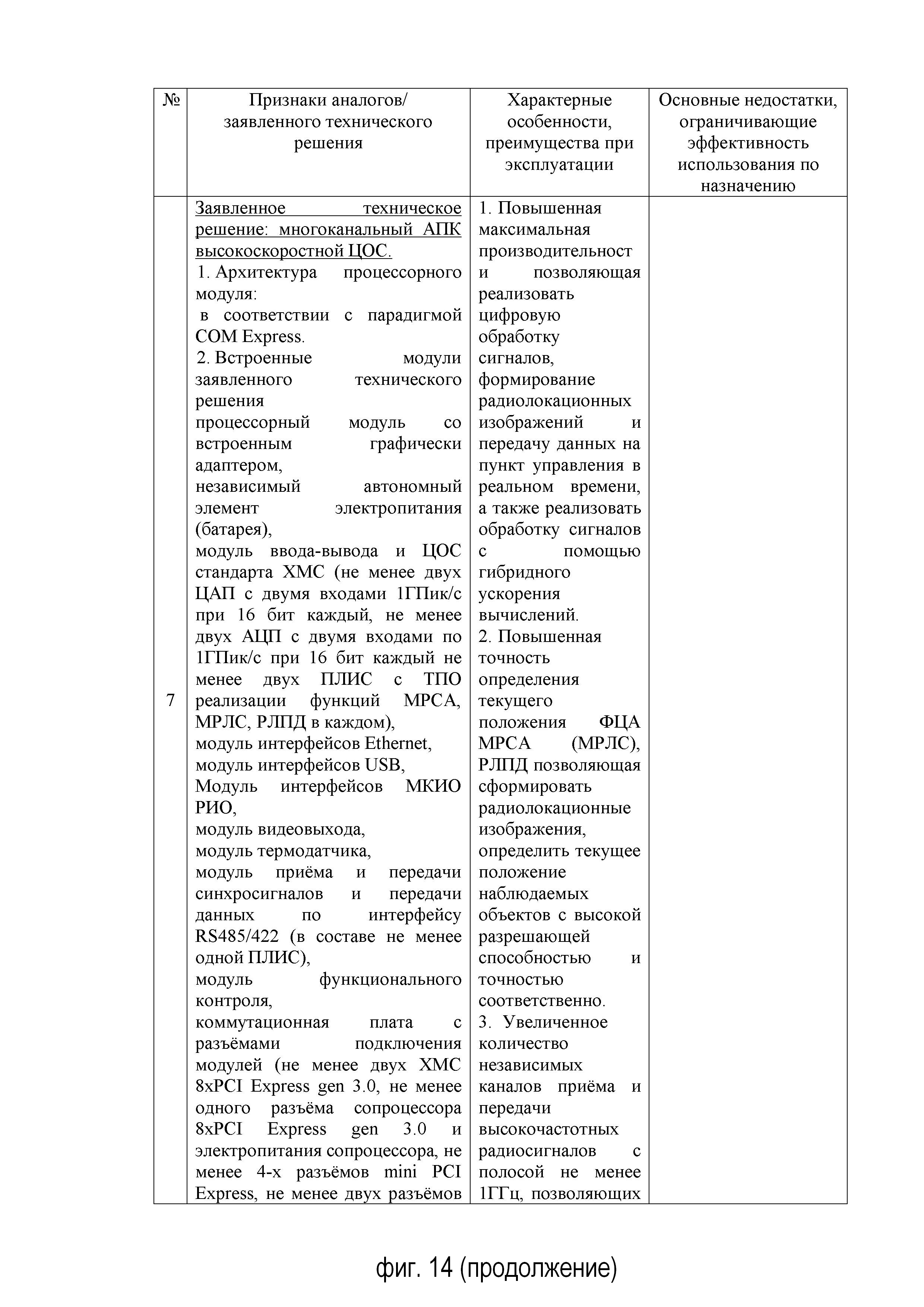
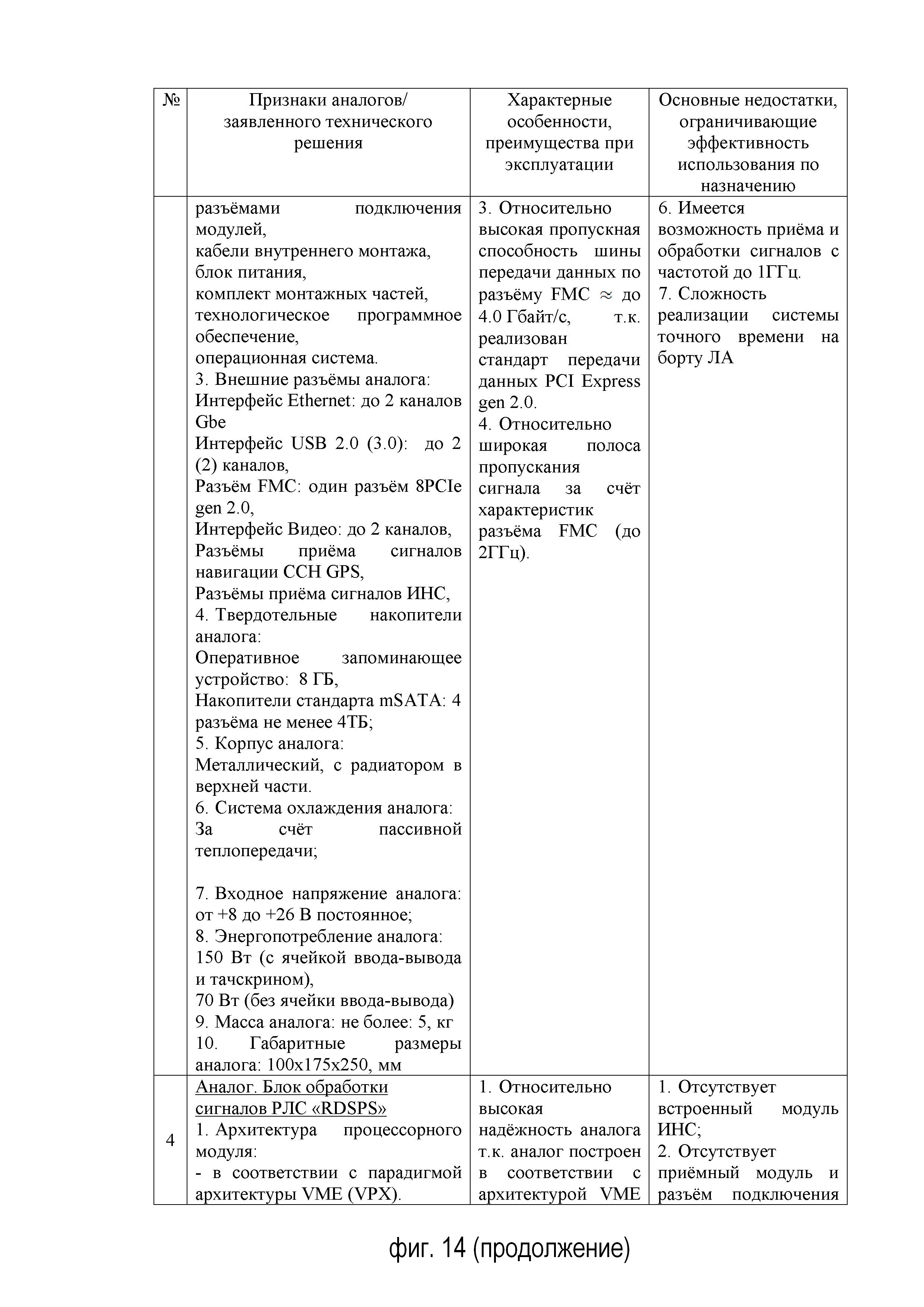
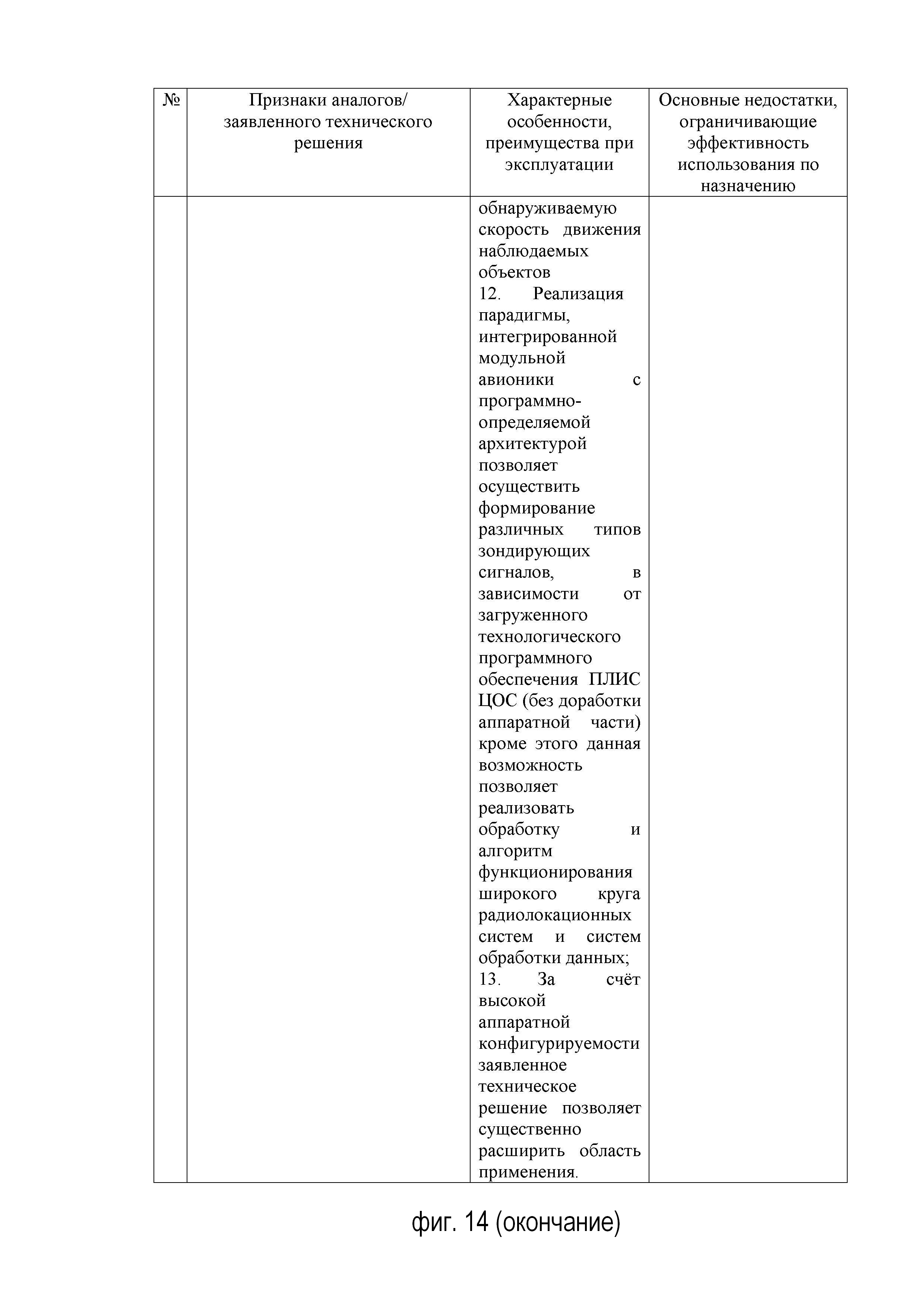
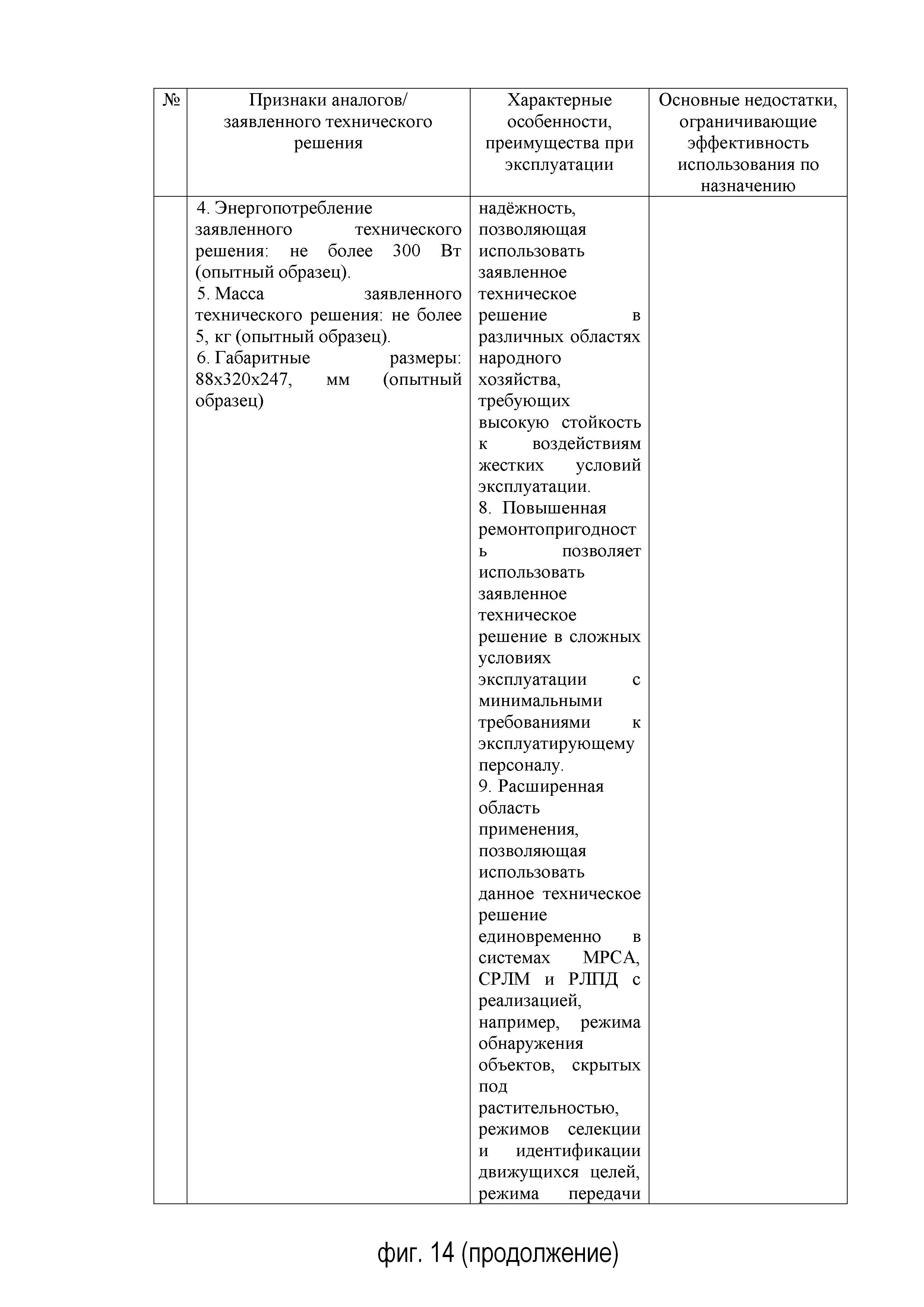
На Фиг. 14 представлена таблица сопоставительного анализа признаков заявленного многоканального АПК высокоскоростной ЦОС (представлены в конце таблицы) и признаков аналогов (таблица приведена заявителем для облегчения сопоставления признаков, обоснования и формулировки достоверности достигнутых результатов).
Задачей заявленного технического решения является создание реконфигурируемого многоканального аппаратно-программного комплекса высокоскоростной цифровой обработки сигналов, обладающего:
1. Повышенной максимальной производительностью и пропускной способностью, позволяющих осуществлять обработку данных в реальном времени.
2. Повышенным качеством определения текущего положения ФЦА МРСА (без дополнительных устройств), позволяющим реализовать режимы обзора местности с высокой и сверхвысокой разрешающей способностью в реальном времени на борту летательного аппарата.
3. Возможностью независимого (без дополнительных устройств) приёма, передачи и цифровой обработки высокочастотных сигналов (с полосой не менее 1 ГГц) как минимум по трём каналам, обеспечивающим реализацию режима селекции и идентификации движущихся целей с помощью функций МРСА.
4. Сниженными стоимостными характеристиками.
5. Максимальным уровнем импортозамещения.
6. Улучшенными массогабаритными характеристиками.
7. Повышенной надёжностью системы в целом.
8. Повышенной ремонтопригодностью.
Заявленными техническими результатами, полученными в результате реализации восьми основных задач заявленного технического решения, являются:
1. Повышение максимальной производительности и пропускной способности, которые обеспечивается за счёт использования сопроцессора, позволяющего осуществлять обработку сигнала посредством распараллеливания вычислений, за счёт введения двух ячеек ввода-вывода с двумя ПЛИС, двумя АЦП и двумя ЦАП и за счёт реализации в коммутационной плате (объединительной плате) высокоскоростного стандарта передачи данных PCI Express gen 3.0.
2. Повышение точности определения текущего положения ФЦА МРСА, которая обеспечивается за счёт введения в состав изделия приёмного модуля ССН, позволяющего осуществлять приём сигналов ССН GPS, Glonass, Galileo по двум антеннам и введения в состав изделия модуля ИНС, а также введения модуля программного обеспечения комплексирования получаемых данных, например, в [9] приведён метод комплексирования сигналов ССН GPS и сигналов ИНС.
3. Увеличение количества независимых каналов приёма и передачи ВЧ сигналов (до четырёх) с полосой не менее 1 ГГц, которое обеспечивается за счёт применения дополнительных ячеек ввода-вывода с многоканальными АЦП и ЦАП и применения модуля синхронизации.
4. Снижение стоимостных показателей, которое обеспечивается за счёт использования программного обеспечения, обладающего кроссплатформенностью (технология распараллеливания вычислений Open CL (например, в [10] показан пример использования данной технологии) и реализации аппаратных средств с открытой архитектурой COM Express Type 6.
5. Реализация максимального импортозамещения (до 80%) посредством использования минимального количества электронной базы иностранного производства, кроме таких элементов, как процессорный модуль, АЦП, ЦАП, ПЛИС, твердотельные накопители.
6. Улучшение массогабаритных показателей, которое обеспечивается за счёт снижения количества вспомогательных устройств, расширения области применения заявленного технического решения (единовременная реализация функций МРСА (МРЛС) и РЛПД – реализован принцип интегрированной модульной авионики) и повышения максимальной вычислительной возможности в составе заявленного технического решения.
7. Повышение надёжности, которое обеспечивается за счёт внедрения дополнительного радиатора, размещаемого в верхней части изделия, применения модифицированного средства хранения твердотельных накопителей (корзина), введения резервного модуля электропитания, снижения количества вспомогательных устройств и кабельных соединений, введения дополнительного (резервного) канала передачи данных по каналу функционального контроля по интерфейсу Ethernet.
8. Повышение ремонтопригодности, которое обеспечивается за счёт применения аппаратных средств типового форм фактора, как-то: процессорный модуль стандарта COM Express, модули интересов Ethernet, МКИО РИО, ССН GPS/Глонасс/Galileo стандарта mini-PCI-express, ячеек ввода-вывода и ЦОС стандарта XMC, твердотельных накопителей стандарта mSATA и 2,5” SATA.
9. Расширение области применения, которое обеспечивается за счёт увеличения количества внешних интерфейсов USB, введения модуля интерфейсов МКИО РИО, введения функционального программного обеспечения (без доработки аппаратной части); реализации режимов МРЛС (МРСА) и РЛПД, применения дополнительных разъёмов приёма и передачи сигналов синхронизации.
10. Заявленное техническое решение имеет возможность применения в МРСА режима обнаружения объектов, скрытых под растительностью за счёт введения соответствующего модуля функционального программного обеспечения (без доработки аппаратной части).
11. Заявленное техническое решение имеет возможность применения в МРЛС аэростатного, вертолётного, самолётного, мачтового, корабельного базирования для реализации режимов селекции движущихся целей за счёт введения соответствующего модуля функционального программного обеспечения (без доработки аппаратной части).
12. Заявленное техническое решение имеет возможность формирования различных типов зондирующих сигналов, в зависимости от загруженного технологического программного обеспечения ПЛИС ЦОС (без доработки аппаратной части).
13. Заявленное техническое решение при применении в МРСА, МРЛС и РЛПД позволяет снизить уровень собственных шумов приёмного тракта за счёт реализации обработки сигналов полностью в цифровом виде, что, в конечном счёте, позволяет увеличить дальность обнаружения целей, повысить радиометрическую чувствительность радиолокационных изображений, повысить надёжность радиоканала передачи данных, повысить качество радиолокационных изображений и снизить минимально обнаруживаемую скорость движения наблюдаемых объектов.
14. Заявленное техническое решение обладает высокой степенью защищённости от несанкционированного доступа при небольших доработках за счёт введения в состав изделия модуля доверенной загрузки, в качестве которого на момент подачи заявки может быть использован модуль «Соболь» формата Mini PCI Express отечественного производителя Код Безопасности.
15. Заявленное техническое решение обладает повышенной контролепригодностью за счёт наличия возможности считывания информации о техническом состоянии изделия (токи потребления, напряжение электропитания, температура нагрева составных частей изделия) по двум линиям локальной вычислительной сети, а также наличия дополнительного видео разъёма для подключения видеомонитора, на котором может отображаться информация, с которого оператор имеет возможность проводить наблюдение за техническим состоянием изделия.
16. Заявленное техническое решение позволяет реализовать гибридное ускорение вычислений за счёт распределения вычисляемой задачи (алгоритма) между центральным процессором, сопроцессором, в качестве которого используется графический адаптер, и программируемой логической интегральной схемой из состава ячейки ввода-вывода и ЦОС, позволяющее использовать преимущества каждого вычислительного устройства для решения поставленной задачи, что обеспечивает оптимальное использование вычислительных мощностей заявленного технического решения (без доработки аппаратных средств многоканального АПК высокоскоростной ЦОС).
17. Наличие не менее двух твердотельных накопителей стандарта SATA 2..5” и mSATA позволяет обеспечить реализацию программного резервирования дискового пространства программным способом (RAID 0 и RAID 1).
18. Заявленное изобретение позволяет существенно расширить область обзора пространства МРСА и МРЛС за счёт наличия возможности реализации РЛПД, так как передача полученных данных может быть осуществлена с борта носителя многоканального АПК высокоскоростной ЦОС непосредственно на командный пункт, без необходимости приземления и передачи «заполненных» дисков на пункт управления для дальнейшей обработки.
19. Заявленное техническое решение имеет возможность конфигурирования пропускной способности шины данных, на Фиг. 6 указаны возможные варианты конфигурации шины данных, в заявленном техническом решении использован вариант А, без существенной доработки конструкции заявленного технического решения могут быть реализованы варианты А, B, C, D. На Фиг. 6 под ГП понимается графический адаптер, выполняющий роль сопроцессора (аппаратного ускорителя вычислений), под ЦПУ понимается процессор общего назначения, под XMC понимается разъём подключения мезонинного модуля (ячейки) ввода-вывода и ЦОС.
20. Заявленное техническое решение обладает широкой аппаратной конфигурируемостью за счёт введения соответствующего коммутатора шины передачи данных на момент подачи заявки, в качестве которого использован PEX-8696. Данный коммутатор позволяет осуществить подключение нескольких сопроцессоров (ускорителей вычислений) (на Фиг. 6 показаны как ГП), нескольких мезонинных модулей ввода-вывода и ЦОС (на Фиг. 6 показаны как XMC), нескольких накопителей (на Фиг. 6 показаны как ПАМЯТЬ), общее количество которых составляет не менее 10 штук с пропускной способностью канала передачи данных не менее 8xPCI Express 2.0. Например, указанная выше возможность аппаратного конфигурирования позволяет реализовать приём и передачу радиолокационных сигналов по 20-ти независимым ФЦА МРЛС (МРСА) и РЛПД со скоростью передачи не менее 8xPCI Express 2.0.
Сущностью заявленного технического решения является многоканальный аппаратно-программный комплекс высокоскоростной цифровой обработки сигналов, содержащий: корпус; систему охлаждения; защитное заземление; блок электропитания; оперативно-запоминающее устройство; центральный процессор; независимый автономный элемент электропитания; коммутационную плату; средства сброса центрального процессора; модуль приёма и передачи синхросигналов; один и более модулей ввода-вывода, содержащие аналогово-цифровой и цифро-аналоговый преобразователи, выполненные с возможностью приема и передачи сигналов; как минимум один накопитель для записи данных; модуль обработки сигнала; операционную систему; и один или более модулей интерфейсов, выполненные с возможностью передачи данных по каналам интерфейса; операционную систему; при этом к центральному процессору непосредственно подключено оперативно-запоминающее устройство, а все остальные модули подключены к центральному процессору через коммутационную плату и кабели, при этом операционная система располагается в накопителях отличающееся тем, что коммутационная плата содержит множество разъемов различных стандартов для подключения различных модулей напрямую, без использования кабелей, при этом к коммутационной плате дополнительно подключен, по меньшей мере, один сопроцессор для аппаратного ускорения обработки сигналов, посредством распараллеливания вычислений; по меньшей мере один модуль приёма сигналов глобальных навигационных средств, выполненный с возможностью приема сигналов, по меньшей мере, двумя антеннами для осуществления дифференциального позиционирования, кроме этого модули ввода-вывода выполнены таким образом, что содержат аналогово-цифровой и цифро-аналоговый преобразователи, позволяющие принимать и передавать высокочастотные сигналы по не менее, чем трём каналам и логические интегральные схемы с технологическим обеспечением позволяющие выполнять обработку сигнала. Комплекс по п. 1, отличающийся тем, что модуль приема сигналов глобальных навигационных средств, позволяет выполнять одновременный прием сигналов систем глобальной навигации GPS, Glonass, Galileo. Комплекс по п. 1, отличающийся тем, что в коммутационную плату введён коммутатор шины передачи данных, обеспечивающий подключение к центральному процессору нескольких накопителей информации, нескольких сопроцессоров, и позволяющий выполнять конфигурирование скорости передачи данных между ними. Комплекс по п. 1, отличающийся тем, что к коммутационной плате дополнительно подключен модуль инерциальных навигационных средств, оснащённый трёх осевым акселерометром, трёх осевым магнетометром и трёх осевым гироскопом. Комплекс по п. 4, отличающийся тем, что накопители дополнительно содержат модуль комплексирования показаний модуля инерциальных навигационных средств и модуля приема сигналов глобальных навигационных средств. Комплекс по п. 1, отличающийся тем, что к коммутационной плате дополнительно подключен как минимум один модуль датчика температуры; средство сброса модуля функционального контроля; модуль функционального контроля, обеспечивающий считывание токов потребления, напряжения электропитания и температуры нагрева устройства. Комплекс по п. 1, отличающийся тем, что модуль ввода-вывода и накопители дополнительно содержат модуль реализации функции многоканальной радиолокационной станции синтезированной апертуры, модуль реализации функции многоканальной радиолокационной станции селекции движущихся целей и радиолокационного обзора пространства и модуль реализации функции радиолинии передачи данных. Комплекс по п. 1, отличающийся тем, что модуль ввода-вывода и накопители дополнительно содержат модуль реализации функций обнаружения объектов, скрытых под растительностью радиолокационной станцией синтезированной апертуры. Комплекс по п. 1, отличающийся тем, что может быть установлено на аэростатный, вертолётный, самолётный, мачтовый, корабельный носитель. Комплекс по п. 1, отличающийся тем, что к коммутационной плате дополнительно подключен модуль доверенной загрузки, обеспечивающий защиту от несанкционированного доступа. Комплекс по п. 1, отличающийся тем, что в состав накопителей ведён модуль реализации гибридного ускорения вычислений за счёт распределения вычисляемой задачи между центральным процессором, сопроцессором и модулем ввода-вывода. Комплекс по п. 1, отличающийся тем, что центральный процессор позволяет выполнять резервирование информации, находящейся в накопителях с применением технологии RAID 1 и RAID 0. Комплекс по п. 1, отличающийся тем, что к коммутационной плате дополнительно подключен резервный блок электропитания, при этом в блоках электропитания последовательно подключены фильтр электромагнитных помех, средство защиты и резервирования, блок преобразования напряжений, при этом блоки электропитания объединены через средство защиты и резервирования. Комплекс по п. 1, отличающийся тем, что к коммутационной плате дополнительно подключен один или более накопителей, располагающиеся в защищённой корзине, вставляемой в корпус устройства, при этом корзина позволяет выполнять их горячую замену. Комплекс по п. 1, отличающийся тем, что встроенный графический адаптер центрального процессора используется в качестве дополнительного сопроцессора. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу RS 485 по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу RS 422 по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу DVI по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу МКИО по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу Ethernet по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что модуль интерфейсов, выполнен с возможностью передачи данных по интерфейсу USB по не менее, чем двум каналам. Комплекс по п. 6, отличающийся тем, что модуль функционального контроля выполнен с возможностью передачи данных по интерфейсу Ethernet по не менее, чем двум каналам. Комплекс по п. 1, отличающийся тем, что центральный процессор выполнен в форм-факторе COM Express Type 6. Комплекс по п. 1, отличающийся тем, что накопители выполнены в форм-факторе mini SATA. Комплекс по п. 1, отличающийся тем, что модули ввода-вывода выполнены в форм-факторе XMC. Комплекс по п. 1, отличающийся тем, что сопроцессор выполнен в форм-факторе MXM Type B. Комплекс по п. 1, отличающийся тем, что модуль приёма сигналов глобальных навигационных средств, выполнен в форм-факторе Mini PCI Express. Комплекс по п. 14, отличающийся тем, что накопители, располагаемые в корзине, размещаемой в корпусе, выполнены в форм-факторе SATA 2,5”. Комплекс по п. 6, отличающийся тем, что модуль функционального контроля выполнен в форм-факторе IMX6.
На Фиг. 1 приведена структурная схема заявленного изобретения, где под позициями:
1.1 и 1.2 – обозначены ячейки ввода-вывода ВЧ сигналов и ЦОС (на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. XMCADC/DAC-1-1…XMCADC/DAC-1-8 И XMCADC/DAC-2-1…XMCADC/DAC-2-8 соответственно), подключаемые к коммутационной плате через разъёмы XMC, со скоростью передачи данных 8хPCI Express 3.0, данная скорость передачи данных может быть увеличена настройкой характеристик коммутатора шины PCI Express (на Фиг. 1 показана под 12.1);
2.1 и 2.2 – обозначены АЦП из состава ячеек ввода-вывода ВЧ сигналов и ЦОС, являются составными элементами ячеек 1.1. и 1.2.;
3.1 и 3.2 – обозначены ЦАП из состава ячеек ввода-вывода ВЧ сигналов и ЦОС, являются составными элементами ячеек 1.1. и 1.2.
4.1 и 4.2 – обозначены ПЛИС из состава ячеек ввода-вывода ВЧ сигналов и ЦОС, являются составными элементами ячеек 1.1 и 1.2 применяемые для осуществления цифровой обработки сигналов, алгоритм ЦОС осуществляется в соответствии с первым и вторым технологическим программным обеспечением (ТПО) ПЛИС, в составе которых стрелками указаны вводы первого и второго (соответственно) технологического программного обеспечения 4.3 и 4.4;
5.1 – приведен модуль приёма и комплексирования сигналов ССН GPS/Galileo/ГЛОНАСС с возможностью приёма сигналов с двух антенн (разъёмы подключения антенн на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под АНТ-1 и АНТ-2), реализованный в стандарте Mini PCI Express (двойными стрелками обозначено соединение модуля с коммутационной платой 12),
6 – приведен модуль синхронизации и передачи данных по интерфейсу RS485/422, в состав которого входит ПЛИС с ТПО интерфейса RS485/422, обеспечивающий передачу данных по интерфейсу RS485/422, обозначенный на Фиг. 1 под 6.1 (разъёмы интерфейса на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. RS485/422-1…RS485/422-5, соответственно) и ТПО интерфейса синхронизации, обозначенный на Фиг 1 под 6.2 (разъёмы интерфейса на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз.
Синхро.-6…Синхро.-16 соответственно),
7 – приведен видеомодуль, реализующий задачу отображения видеоинформации по двум интерфейсам (на Фиг. 1 разъёмы интерфейса не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. DVI-D-1 и DVI-D-2, соответственно);
8 – модуль передачи данных по стандарту 10/100/100 Ethernet Base-T (на Фиг. 1 разъёмы не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. LAN-1 и LAN-2);
9 – модуль передачи данных по стандарту МКИО РИО (на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. МКИО-1 и МКИО-2);
10.1 и 10.2 – твердотельные накопители стандарта mSATA объёмом памяти не менее 1 террабайт (ТБ) каждый;
11.1 – встроенный модуль инерциальных навигационных средств, в составе которого имеется трёх осевой акселерометр, трёх осевой магнетометр и трёх осевой гироскоп;
12 – коммутационная плата с внешними соединениями и с коммутатором шины PCI Express - 12.1, на дату подачи заявки в качестве, которого использован PEX-8696;
13.1 и 13.2 - оперативно запоминающие устройства;
14.1, 14.2 и 14.3 – Bios, предустановленная операционная система (ОС) с драйверной поддержкой и функциональное программное обеспечение (ФПО), зависящее от решаемой задачи, но, как минимум, имеющая в своём составе программный модуль отображения видеоинформации, программный модуль комплексирования сигналов ИНС и ССН, программный модуль идентификации движущихся объектов, программный модуль реализации функций МРСА, программный модуль распараллеливания вычислений, который, например, может быть построен с соответствии с работой [10], программный модуль функционального контроля и технического управления, программный модуль передачи данных на пункт управления, программный модуль автофокусировки;
14.4 – независимый автономный элемент электропитания (батарея);
15 – процессорный модуль с встроенным графически адаптером (не указан отдельной позицией для исключения загромождения), соединен с чипсетом - 15.1;
16.1 – блок преобразования напряжений;
16.2 – схема защиты и резервирования электропитания;
16.3 – фильтр, обеспечивающий защиту устройства от электромагнитных помех;
16.4 – выключатель электропитания;
17.1 и 17.2 – основной и резервный блоки электропитания, обозначенные штрихпунктирными линиями соответственно;
18 – модуль USB, обеспечивающий приём/передачу данных по шести интерфейсам (на Фиг.1 не показаны для исключения загромождения, но приведены на Фиг.2 под поз. USB-1… USB-6);
19 – модуль датчика температуры;
20 – сопроцессор, подключённый к коммутационной плате, в качестве которого (сопроцессора) может быть использована графическая карта стандарта MXM-B;
21 – модуль функционального контроля, в качестве которого используется процессорный модуль, построенный по стандарту IMX6, имеющий разъёмы передачи данных по двум интерфейсам Ethernet (на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. ФК-1 и ФК-2);
22.1 и 22.2 – твердотельные накопители стандарта 2,5” SATA, с общим объемом памяти не менее 8 терабайт (ТБ) каждый;
23 – защитная корзина, встроенная в состав предлагаемого изобретения (выделена штрихпунктирной линией);
Кнопки подачи сигнала сброса центрального процессора и процессорного модуля функционального контроля на Фиг. 1 не обозначены для исключения загромождения чертежа, но приведены на Фиг. 2 под поз. сброс ФК, сброс ЦПУ.
Заявленное техническое решение работает следующим образом:
К заявленному изделию многоканальный АПК высокоскоростной ЦОС, подключенному к шине заземления (см. Фиг.1 не обозначен отдельно позицией на Фиг 2 показан под поз. (2)), через защитное заземление, по двум каналам (на Фиг.1 представлены слева и справа внизу Электропитание от +9 до 36В, также не обозначены отдельными позициями) подаётся электропитание с напряжением, изменяющимся в диапазоне от  .
.
При переключении тумблера электропитания 16.4 в положение «ВКЛ», ток поступает на вход двух блоков электропитания 17.1 и 17.2, внутри которых ток сначала проходит через схему фильтрации помех 16.3, а затем на вход схемы защиты и резервирования 16.2, которая осуществляет передачу тока на блок преобразования напряжений блока питания 17.1 или 17.2, питающих коммутационную плату 12.
Далее электропитание подаётся на процессорный модуль 15, который с помощью чипсета 15.1 и встроенного программного обеспечения 14.1 и Bios осуществляет инициализацию подключенных к коммутационной плате модулей.
Далее процессорный модуль, считывая информацию с ОЗУ 13.1 и 13.2, с помощью встроенного графического адаптера выполняет загрузку операционной системы 14.2 (ОС), записанной в твердотельном накопителе 10.1, в качестве которой может быть использована ОС «Эльбрус», ОС «Астра Линукс», ОС «QNX» либо ОС Windows.
В тоже время, параллельно включению тумблера запускается технологическое программное обеспечение ячеек ввода-вывода 4.3 и 4.4. Одновременно с загрузкой ОС осуществляется инициализация всех подключенных к коммутационной плате модулей многоканального АПК высокоскоростной ЦОС.
По окончании полной загрузки ОС, оператор может осуществить запуск предустановленного функционального программного обеспечения (ФПО) 14.3, записанного в твердотельном накопителе 10.2, реализующее поставленную задачу.
При зависании процесса оператор имеет возможность сброса центрального процессора и процессора функционального контроля (сброс ЦПУ и сброс ФК, соответственно).
По окончании работы, т.е. после завершения выполнения основных задач, оператор осуществляет запуск команды отключения, после чего ОС инициализирует процесс выключения заявленного технического решения, по окончании которой оператор переводит выключатель 16.4 в положение «ВЫКЛ».
Далее заявителем приведены примеры конкретного использования заявленного технического решения.
ПРИМЕР 1.
Использование заявленного изобретения в МРСА, размещаемых на борту пилотируемых летательных аппаратов.
На Фиг. 4 представлена структурная схема подключения одной из модификаций заявленного технического решения для решения задач обзора пространства с помощью многоканального радиолокатора с синтезированной апертурой, размещенного на борту пилотируемого летательного аппарата. К заявленному техническому решению (многоканальный АПК высокоскоростной ЦОС (поз. 24), размещённому, например, в центре масс летательного аппарата, подключают клавиатуру оператора 25, два видеомонитора 26.1 и 26.2, манипулятор типа «мышь» 27, первую и вторую антенну средств спутниковой навигации 28 и 29, три дополнительных средства ИНС 11.2…11.4, которые целесообразно размещать, например, на наиболее удалённом расстоянии от расположения заявленного технического решения (24) для обеспечения максимально возможной точности позиционирования носителя МРСА в пространстве.
Далее к заявленному многоканальному АПК высокоскоростной ЦОС (24) подключают ВЧ часть МРСА и ВЧ часть радиолинии передачи данных на пункт управления 35.1 и 35.2, соответственно, антенну активной фазированной антенной решетки (АФАР) МРСА и АФАР РЛПД 36.1 и 36.2, соответственно. В состав 35.1, 35.2, 36.1. и 36.2 входят:
30.1 и 30.2 модули генерации ВЧ сигналов, 31.1…31.4 модуль ВЧ сопряжения,
32.1…32.4 приёмно-передающие модули,
33.1, 33.4 и 33.2, 33.3 модули технического управления и функционального контроля, соответственно,
34.1, 34.4 и 34.2, 34.3 средства технического управления и функционального контроля, соответственно,
37.1…37.4 излучатели АФАР.
При этом заявитель обращает внимание, что аппаратная реализация составных частей АФАР не детализирована в силу её общеизвестности, описание которой (более детальное), т.е. варианты построения составных частей АФАР и ВЧ части МРСА и РЛПД, представлены в источнике [11].
Кабели внутренней синхронизации АЦП и ЦАП ячейки ввода-вывода и синхронизации, на Фиг. 4 не показаны для исключения загромождения материалов, наименования разъёмов ячеек ввода-вывода и ЦОС (XMCADC/DAC-1-1…XMCADC/DAC-1-4 и
XMCADC/DAC-2-1…XMCADC/DAC-2-4) также для исключения загромождения указаны схематично.
Представленный пример позволяет реализовать многоканальный (три независимых ФЦА) канальный обзор местности с помощью МРСА и передачу радиолокационных изображений по радиолинии на пункт управления ЛА для дальнейшей обработки при минимальных затратах энергообеспечения и малых габаритных размерах системы в целом.
Причём на борту летательного аппарата оператор имеет возможность выбора режима обзора и наблюдения за зоной ответственности и текущего состоянием системы в целом в реальном времени.
При этом несущая частота МРСА может быть различной, в зависимости от характеристик ВЧ тракта МРСА, а имеющиеся в производстве ячейки ввода-вывода стандарта XMC на дату представления материалов заявки позволяют принимать и формировать ВЧ сигналы с полосой до 6,5 ГГц, которая обеспечивает возможность построения радиолокационных изображений с высокой и сверхвысокой разрешающей способностью. Кроме указанного, имеющиеся на борту средства аппаратного ускорения вычислений (сопроцессор) позволяет (в режиме реального времени) увеличить производительность системы на 8ТФлоп/с, что обеспечивает, в зависимости от размера радиолокационного изображения (РЛИ), осуществление обработки сигналов в реальном времени. Кроме этого, при необходимости вычислительные возможности заявленного технического решения могут быть расширены за счёт аппаратного конфигурирования. Варианты аппаратного конфигурирования шины передачи данных представлены на Фиг. 6, вариант Е.
ПРИМЕР 2. Использование заявленного изобретения в МРСА, размещаемых на борту беспилотных летательных аппаратах.
На Фиг. 5 представлена структурная схема подключения заявленного технического решения для решения задач обзора пространства с помощью многоканального радиолокатора синтезированной апертуры, размещенного на борту беспилотного летательного аппарата. Подключение внешних элементов конструкции системы идентично варианту, представленному на Фиг. 4. При этом устройства 25…27, (т.е. клавиатура, мышь и два видеомонитора) в указанном Примере не используются, в силу отсутствия необходимости (т.к. заявленное техническое решение 24 размещено на БЛА).
Представленный Пример 2 позволяет реализовать многоканальный (три независимых ФЦА) обзор местности с помощью МРСА и передачи радиолокационных изображений по радиолинии на пункт управления для дальнейшей обработки.
Причём выбор режима обзора и наблюдения за окружающей обстановкой и текущего состояния зоны ответственности в реальном времени осуществляется оператором пункта управления беспилотного летательного аппарата.
Основываясь на изложенной выше информации, представляется возможным сделать логические умозаключения в отношении реализации посредством заявленного технического решения возможности реализации всех поставленных задач и обеспечить достижение всех дополнительно реализованных технических результатов, а именно:
1. Обеспечение повышенной максимальной производительности и пропускной способности, позволяющих осуществлять обработку данных в реальном времени;
2. Обеспечение определения текущего положения ФЦА МРСА с высокой точностью, позволяющей реализовать режимы обзора местности с высокой и сверхвысокой разрешающей способностью в реальном времени на борту летательного аппарата;
3. Обеспечение возможности независимого (без дополнительных устройств) приёма, передачи и цифровой обработки высокочастотных сигналов (с полосой не менее 1 ГГц) как минимум по трём каналам, обеспечивающим реализацию режима селекции и идентификации движущихся целей с помощью функций МРСА;
4. Обеспечение сниженных стоимостных характеристик;
5. Обеспечение максимального импортозамещения;
6. Обеспечение улучшенных массогабаритных характеристик;
7. Обеспечение повышенной надёжности системы в целом;
8. Обеспечение повышенной ремонтопригодности;
9. Расширение области применения;
10. Обеспечение возможности реализации режима обнаружения объектов, скрытых под растительностью и режима радиолокационного картографирования;
11. Обеспечение возможности реализации при использовании в многоканальных радиолокационных станциях аэростатного, вертолётного, самолётного, мачтового, корабельного базирования режима селекции движущихся целей и радиолокационного обзора пространства;
12. Обеспечение возможности формирования различных типов зондирующих сигналов, в зависимости от загруженного технологического программного обеспечения программируемой логической интегральной схемы – реализации задачи программно-определяемых радиосистем;
13. Снижение общего уровня шумов в режиме приёма, позволяющее увеличить дальность обнаружения целей, повысить радиометрическую чувствительность радиолокационных изображений, повысить надёжность радиоканала передачи данных, повысить качество радиолокационных изображений и снизить минимально обнаруживаемую скорость движения наблюдаемых объектов в режиме селекции движущихся целей;
14. Обеспечение повышенной стойкости к несанкционированному доступу;
15. Обеспечение повышенной контролепригодности (токи потребления, напряжение электропитания, температура нагрева составных частей изделия);
16. Обеспечение реализации парадигмы гибридного ускорения вычислений (распределение поставленной задачи (алгоритма) между центральным процессором, сопроцессором, в качестве которого используется графический адаптер, и программируемой логической интегральной схемой из состава ячейки ввода-вывода и ЦОС), позволяющее использовать преимущества каждого вычислительного устройства, обеспечивающее оптимальное использование вычислительных мощностей заявленного технического решения;
17. Обеспечение резервирования данных, записанных на твердотельные накопители стандарта SATA 2.5” и mSATA (как минимум, RAID 0 и RAID 1);
18. Повышение автономности работы системы и увеличение области охвата (возможность передачи данных непосредственно на командный пункт управления, дистанционно, без необходимости приземления);
19. Обеспечение программной реконфигурируемости архитектуры заявленного технического решения (без существенной доработки конструкции);
20. Обеспечение возможности наращивания вычислительных мощностей за счёт глубокой аппаратной реконфигурируемости.
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлена совокупность признаков, приведенная в независимом пункте заявленного технического решения.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлены технические решения с заявленной совокупностью существенных признаков, приведенных в независимом пункте заявленного технического решения, и не выявлены технические результаты, реализуемые посредством применения указанных признаков.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, т.к. может быть реализовано в виде натурного объекта.
Использованные источники информации:
1. Лобжанидзе Д.Т., Сазонов В.В. «Обнаружение и построение изображений движущихся объектов радиолокаторами синтезированной апертуры», Труды IV Всероссийской научно-технической конференции «РТИ Системы ВКО–2016», Из-во: Московский Государственный Технический Университет имени Н.Э. Баумана (Национальный Исследовательский Университет) (Москва), 2017, с. 590-603
2. Лобжанидзе Д.Т., Сазонов В.В. «Модификация классических алгоритмов формирования изображений движущихся объектов», Труды Международной конференции «Радиолокация, навигация, связь» (Воронеж), 2016, т. 3 стр. 1082-1096
https://www.tridsys.com/images/RAPTOR_MFRF_ New.pdf3. (от 08.06.18)
https://innovative-dsp.com/wp-content/uploads/2018/02/ePC-Duo_datasheet.pdf4.
(от 08.06.18)
https://innovative-dsp.com/wp-content/uploads/2018/02/Mini-K7_datasheet.pdf5.
(от 08.06.18)
(от 08.06.18)
http://www.rtsoft.ru/catalog/pdf/pdf/Directory_Integro_2.pdf6. (от 08.06.18)
7. Remi Baque, Philippe Dreuillet, Bernard Vaizan “ Curacao SAR/GMTI Compact Radar Cube Concept”, 2013 International Conference on Radar (Radar), p. 1097-5764
8. Медведев Е.М. Интегральные навигационные комплексы GPS/IMU. Геопрофи, №3, 2005.-с.39-40
9. Лобжанидзе Д.Т., «Аппаратное ускорение обработки цифровых радиоголограмм в РСА», Труды 27-ой Международной крымской конференции "СВЧ-техника и телекоммуникационные технологии" (КРЫМИКО'2017), Из-во: Федеральное государственное автономное образовательное учреждение высшего образования "Севастопольский Государственный Университет" (Севастополь), 2017, с. 1679-1683.
10. Воскресенский Д.И., Овчинникова Е.В., Шмачилин П.А. «Бортовые цифровые антенные решётки и их элементы» /. Под ред. Д.И. Воскресенского. м. 208 с.: ил. — М.: Радиотехника, 2013



Электрод-инструмент для комбинированной резки токопроводящих материалов
Электрод-инструмент для комбинированной резки токопроводящих материалов
Электрод-инструмент для комбинированной резки токопроводящих материалов

