Результат интеллектуальной деятельности: СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ СУДОВ В АКВАТОРИИ ПОГРАНИЧНОЙ ЗОНЫ
Вид РИД
Изобретение
Изобретение относится к техническим средствам охраны объектов и может быть использовано для охраны морских границ от неправомерного проникновения через них территорию Российской Федерации иностранных судов.
Известна система обеспечения безопасности моста по патенту РФ на изобретение №2598803, МПК G08B 21/08, опубл. 27.09.2016 г., прототип.
Это устройство обеспечения безопасности моста, соединяющего два берега акватории с мостовыми подходами с двух сторон, огороженными заборами П-образной формы, содержит рабочее место оператора, состоящее из системного блока, монитора, клавиатуры и манипулятора типа «Мышь», а также модуль охранной сигнализации с пультом, выход которого соединен с системным блоком, а входы соединены с датчиками контроля безопасности, а также модуль управления радиолокатором, содержащим по меньшей мере два радиолокатора, соединенных через контроллер радиолокатора с системным блоком и установленных на мостовых подходах, также содержит модуль гидролокации, содержащий контроллер гидролокации, соединенный с гидролокаторами, выполненными в выносной (подводной) части, состоящей из активных приемно-излучающих модулей, объединенных в секции длиной от 100 до 1000 м каждая и связанных магистральным кабелем с источниками энергоснабжения, обеспечивающей излучение и прием зондирующего сигнала, обработку сигнальной информации, передачу информации на стационарный надводный пункт наблюдения.
Недостатки этого устройства:
- отсутствие возможности распознания судов, -невозможность сопровождения судов,
- низкая точность обнаружения координат судов,
- отсутствие данных по реальной информации о внешнем виде обнаруженных судов.
Задачи создания изобретения: более точное определение координат судов, приближающихся к границе и получение информации об их внешнем виде и технических характеристик на экране монитора оператора и автоматизация их сопровождения.
Достигнутый технический результат: автоматизация сопровождения судов.
Решение указанных задач достигнуто в системе обнаружения и сопровождения судов в акватории пограничной зоны, содержащей рабочее место оператора, состоящее из системного блока, монитора, клавиатуры и манипулятора типа «Мышь», а также модуль определения «свой- чужой» с приемно-передающей антенной, пультом запроса и приемником ответа, выход которого соединен с системным блоком, а также модуль управления радиолокатором, содержащим по меньшей мере один радиолокатор, антенная решетка которого соединена через контроллер радиолокатора с системным блоком, тем, что к системному блоку присоединен сервер системы 4 ГИС с картами акватории и базой реальных фото по отечественным и иностранным военным и гражданским судам в системе предусмотрен также контроллер радиолокатора, который подает управляющие сигналы на приводы управления положением антенной решетки радиолокатора для сопровождения судна, не отвечающего на сигнал «свой-чужой», где сопровождение включает контроль и запись в память системного блока положения судна в виде трехмерной модели в двухмерном плане акватории и возможность восстановления его маршрута.
Система обнаружения и сопровождения судов в акватории пограничной зоны может содержать модуль гидролокации, соединенный с гидролокаторами, выполненными в выносной (подводной) части, состоящей из активных приемно-излучающих модулей, объединенных в модули и связанных магистральным кабелем с источниками энергоснабжения, обеспечивающими излучение и прием зондирующего сигнала, обработку сигнальной информации, передачу информации на стационарный надводный пункт наблюдения.
Система обнаружения и сопровождения судов в акватории пограничной зоны по п. 1 или 2, отличающаяся тем, что модуль определения «свой-чужой» выполнен с возможностью работы на частотах от 20 до 40 МГГц.
Приемно-передающая антенна модуля определения «свой-чужой» может быть выполнена внутри антенной решетки радиолокатора.
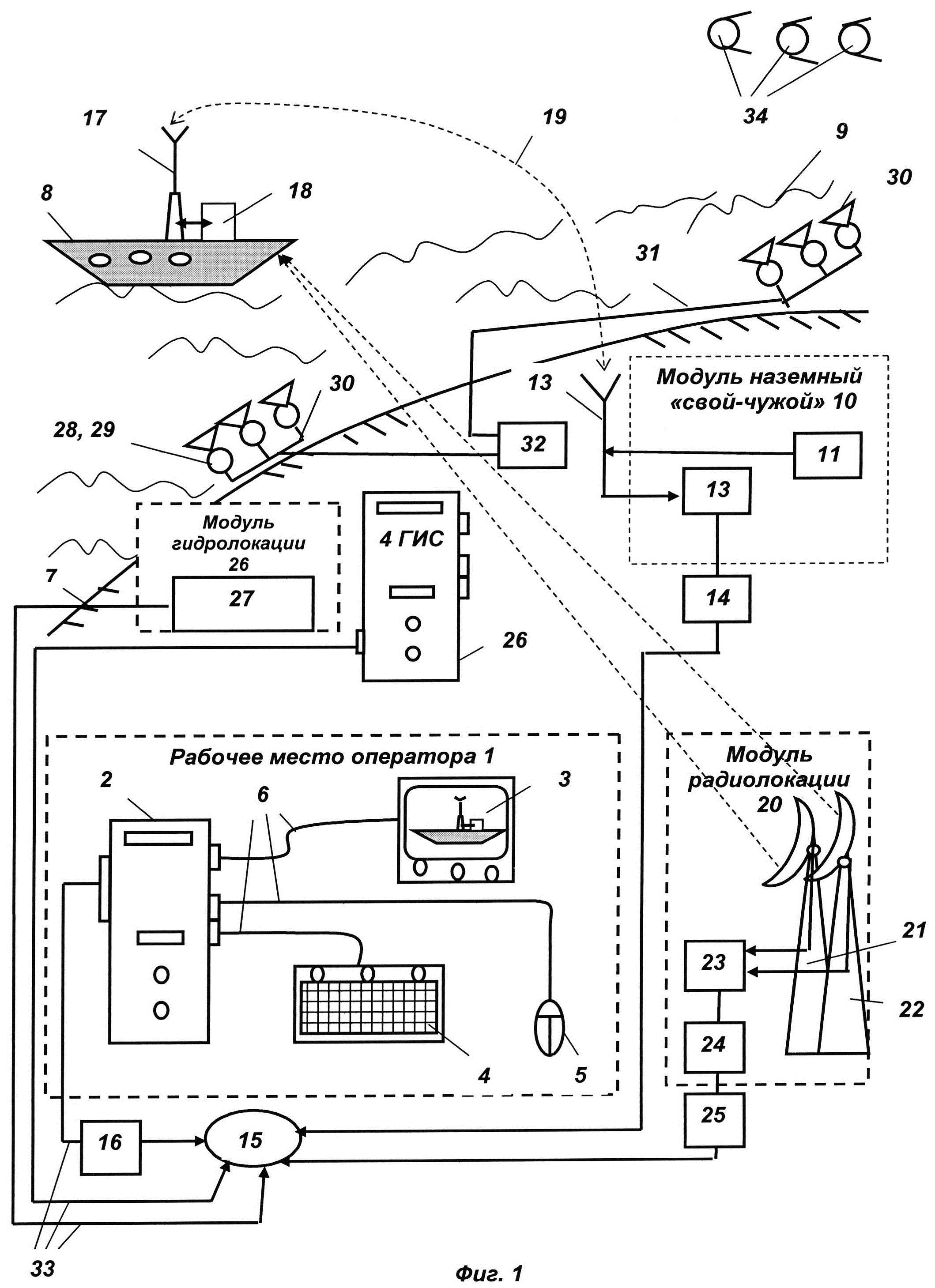
Сущность изобретения поясняется на фиг. 1…4, где:
- на фиг. 1 приведена принципиальная схема устройства,
- на фиг. 2 приведена схема ответчика,
- на фиг. 3 приведена схема запросчика,
- на фиг. 4 схема решетки радиолокатора.
В описании применены следующие обозначения: рабочее место оператора 1, системный блок 2,
монитор 3,
клавиатура 4,
манипулятор типа «Мышь» 5,
связи 6,
земля 7,
судно 8,
акватория 9,
наземный модуль «свой- чужой» 10,
пульт запроса 11,
приемник ответа 12,
приемно-передающая антенна 13,
первый модем 14,
сеть Интернет 15,
второй модем 16,
судовая приемно-предающая антенна 17,
приемник системы Глонасс 18,
радиоканал 19.
модуль радиолокации 20,
радиолокатор 21,
радиолокатор 22,
контроллер радиолокатора 23,
пульт 24,
третий модем 25,
сервер системы 4 ГИС 26.
модуль гидролокации 27,
гидролокатор 28,
активный приемно-излучающий модуль 29,
блок 30,
магистральный кабель 31,
источник энергоснабжения 32,
линия связи 33.
спутники 34.
первый генератор импульсов (ГИ) 35
первый цифровой счетчик (ЦС) 36;
кодовое вычислительное устройство (КВУ) 37
вычитающее устройство (ВУ) 38;
декодер ответного сигнала (ДОС) 39;
приемник ответного сигнала (Пр ОС) 40,
синхронизатор по фазе 41,
синхронизатор цифрового кода 42;
второй генератор импульсов 43,
второй цифровой счетчик 44,
второе кодовое вычислительное устройство 45,
сумматор 46,
кодирующее устройство (КУ) 47,
передатчик ответного сигнала 48,
устройство синхронизации (УС) 49,
вторая линия задержки (ЛЗ) 50,
первая линия задержки 51,
четвертая линия задержки 52,
первый регистр запросного числа (РЗЧ) 53,
первый электронный ключ (ЭК) 54,
второй электронный ключ 55,
четвертый электронный ключ 56,
третья линия задержки 57,
третий электронный ключ 58,
кодер запросного числа (КЗЧ) 59,
передатчик 60,
первый антенный коммутатор (АК) 61,
счетчик тактовых импульсов 62,
первый генератор тактовых импульсов (ГТИ) 63,
первый буферный регистр 64,
первый приемник запросного сигнала 65,
второй буферный регистр 66,
второй антенный коммутатор 67,
второй приемник запросного сигнала 68,
декодер запросного числа (ДЗЧ) 69,
второй регистр запросного числа 70,
сумматор по модулю два (СМД) 71,
регистр пароля (РП) 72,
счетчик совпадений (СС) 73,
ответчик 74,
запросчик 75,
схема совпадений (СхС) 76,
пятая линия задержки 77,
первая шифровальная колодка 78,
вторая шифровальная колодка 79.
основание 80,
верхняя поворотная платформа 81,
решетка радиолокатора 82.
кронштейн 83,
цилиндрический шарнир 84,
верхний кожух 85,
вертикальный вал 86,
привод поворота в горизонтальной плоскости 87,
привод управления в вертикальной плоскости 88,
датчик вертикального отклонения 89,
датчик азимута 90,
измерительные связи 91,
контроллер датчиков 92,
линии управления 93.
ОПИСАНИЕ СХЕМЫ СИСТЕМЫ
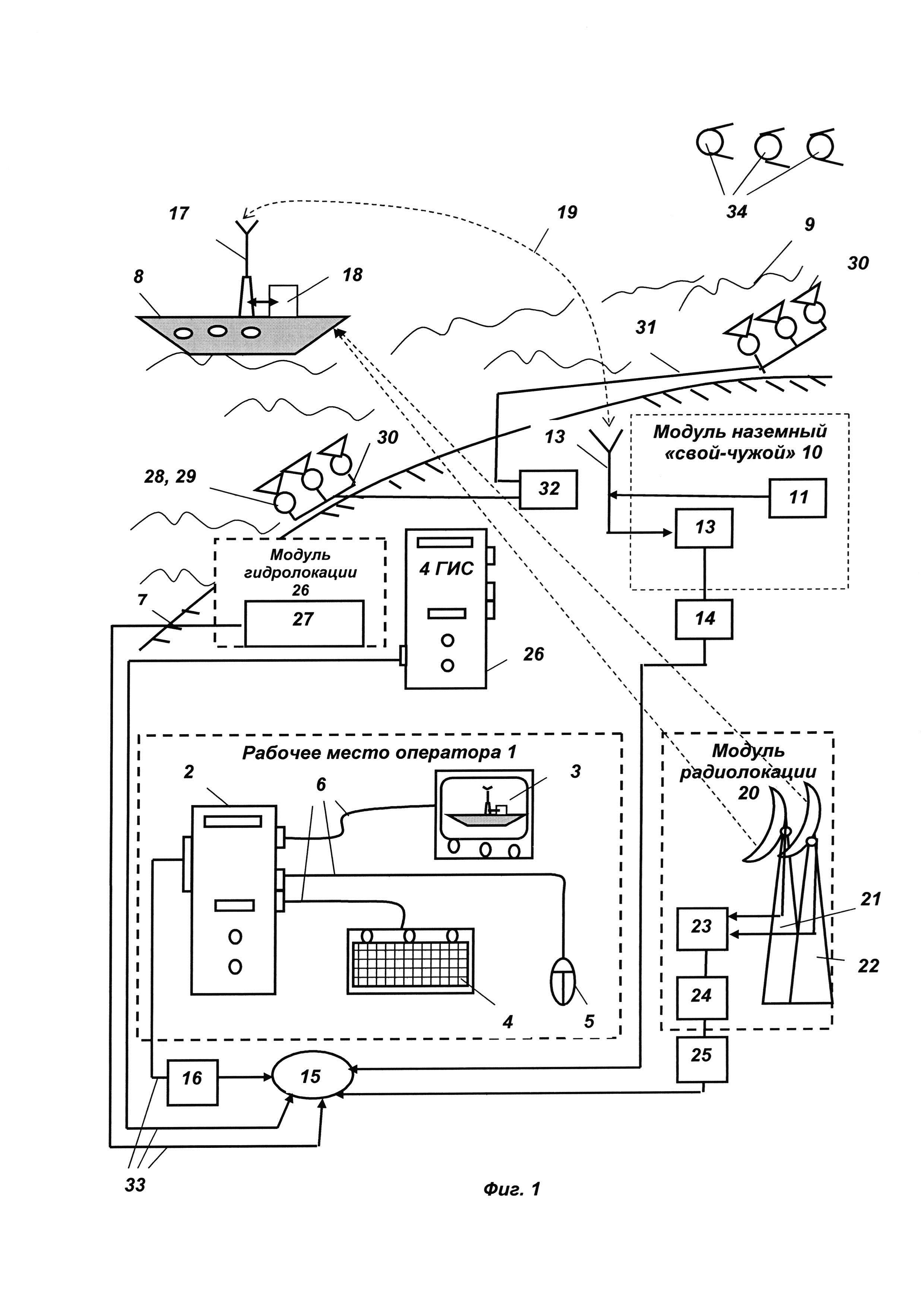
Система обнаружения и сопровождения судов в акватории пограничной зоны (фиг. 1), содержит рабочее место оператора 1, состоящее из системного блока 2, монитора 3, клавиатуры 4 и манипулятора типа «Мышь»5, соединенных связями 6.
Рабочее место оператора 1 находится на земле 7 и предназначено для обнаружения и сопровождения судов 8 в акватории 9.
Также система содержит наземный модуль «свой-чужой» 10 с пультом запроса 11, приемником ответа 12, соединенными с приемно-передающей антенной 13. Выход наземного модуля «свой-чужой» 10 соединен через первый модем 14 и сеть Интернет 15 через второй модем 16 с системным блоком 2.
На судах 8 установлены судовые приемно-предающие антенны 17 и приемник системы Глонасс 18. Приемно-передающие антенны 13 и судовая приемно-передающая антенна 17 соединены радиоканалом 19.
В состав системы входит также модуль радиолокации 20, содержащий, по меньшей мере, два радиолокатора 21 и 22, соединенных через контроллер радиолокатора 23 пульт 24 и третий модем 25 через сеть Интернет 15 с системным блоком 2.
К системному блоку 2 присоединен сервер системы 4 ГИС 26 с картами акватории и базой реальных фото по отечественным и иностранным военным и гражданским судам.
Система обнаружения и сопровождения судов в акватории пограничной зоны может содержать модуль гидролокации 27, соединенный с гидролокаторами 28, выполненными в выносной (подводной) части, состоящей из активных приемно-излучающих модулей 29, объединенных в блоки 30 и связанных магистральным кабелем 31 с источниками энергоснабжения 32, обеспечивающей излучение и прием зондирующего сигнала, обработку сигнальной информации, передачу информации на системный блок 2.
Все связи между модулями выполнены линиями связи 33. В систему ГЛОНАСС входят спутники 34 российского производства. Система GPS не используется.
ОПИСАНИЕ СХЕМЫ «СВОЙ-ЧУЖОЙ»
Схема «свой-чужой» изображена на фиг. 2 и 3.
Вначале необходимо синхронизировать работу оборудования запросчика и ответчика. Синхронизация осуществляется на Земле перед тем, как объект (например, судно) войдет в контролируемую зону с помощью устройства синхронизации 49 (фиг. 2).
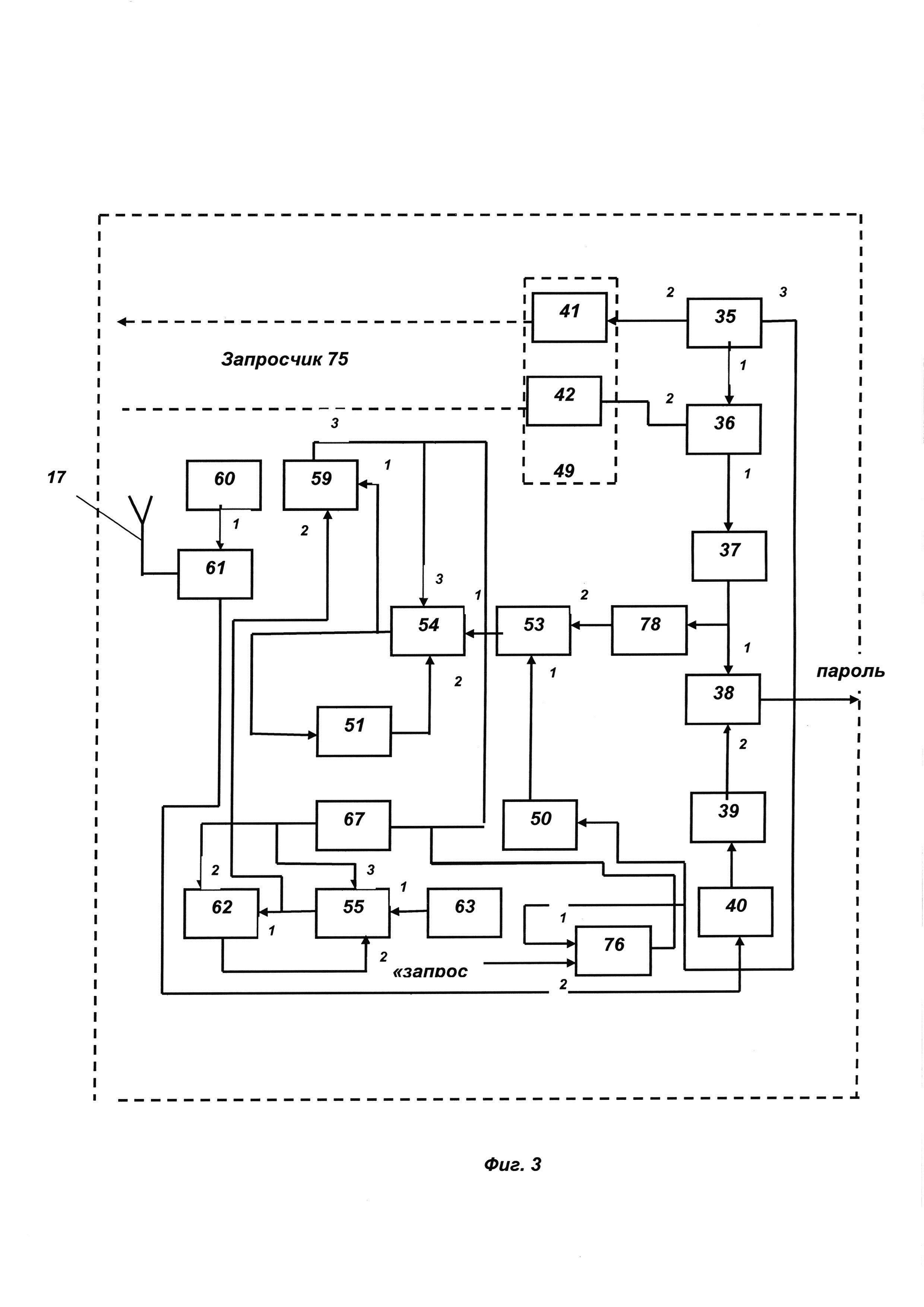
Для чего выход синхронизатора по фазе 41 (фиг. 3) проводным каналом связи соединен со вторым генератором импульсов 43, а выход синхронизатора цифрового кода 42 - со вторым входом второго цифрового счетчика 44.
Устройство 41 может состоять из простой импульсной усилительной схемы, и его вход соединен с первым выходом из генератора импульсов 35 и подает их на вход второго генератора импульсов 43, обеспечивая тем самым синфазную работу генератора импульсов 35 и второго генератора импульсов 43.
Синхронизатор цифрового кода 42 может состоять из множества простых усилителей постоянного тока, и соединен с выходом цифрового счетчика 36, а выход синхронизтора цифрового кода соединен с входом второго цифрового счетчика 44, посредством чего соответствующие каскады второго цифрового счетчика 44 будут в таких же состояниях, что и в цифровом счетчике 36.
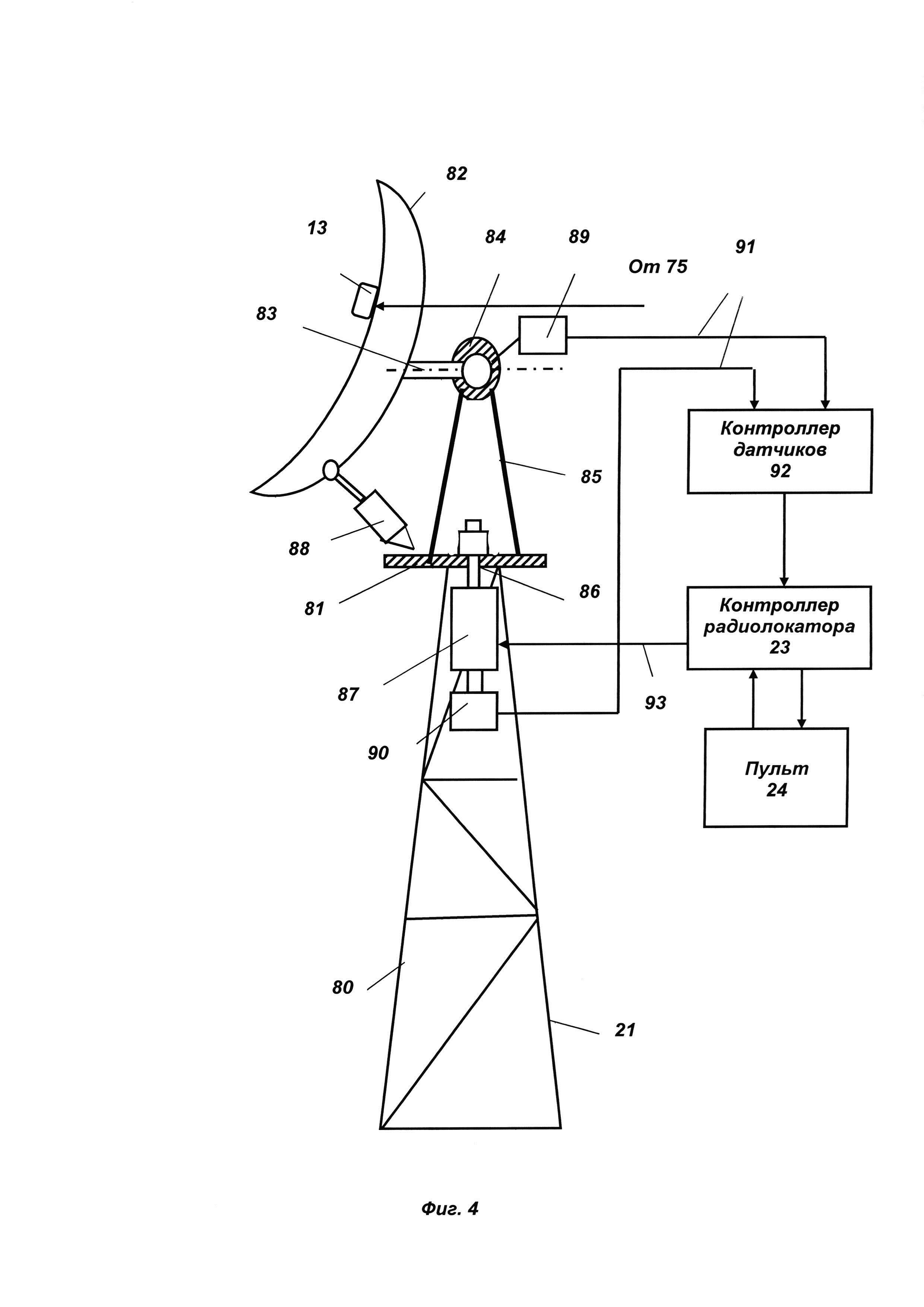
Выход из второго цифрового счетчика 44 соединен с входом во второе кодовое вычислительное устройство 45, выход из которого соединен с входом в сумматор 46. Выход из сумматора 46 соединен с входом в кодирующее устройство 47. Выход из кодирующего устройства 47 соединен с входом в передатчик ответного сигнала 48. а его выход соединен с входом во второй антенный коммутатор 67, выход из которого соединен с входом второго приемника запросного сигнала 68.
К второму антенному коммутатору 67 присоединена наземная приемно-передающая антенна 13 (фиг. 1 и 2) модуля «свой-чужой» 10. При этом приемно-передающая антенна 13 может быть установлена на радиолокаторе 21 (фиг. 4)
Первый выход второго приемника запросного сигнала 68 соединен с вторым входом сумматора по модулю два 71, выход из которого соединен с первым входом счетчика совпадений 73. Выход из счетчика совпадений 73 соединен с вторым входом в передатчик ответного сигнала 48.
Первый вход сумматора по входу 71 соединен с выходом в регистр пароля 72. Второй выход из второго приемника запросного сигнала 34 соединен с вторым входом в третий электронный ключ 58 и вторым входом в четвертый электронный ключ 56. Выход из четвертого электронного ключа 56 соединен с входом в первый приемник запросного сигнала 65, а его первый вход соединен с первым выходом из первого буферного регистра 64.
Выход из второго генератора импульсов 43 соединен с входом в пятую линию задержки 77, выход из которой соединен с вторым входом второго буферного регистра 76. При этом первый его вход соединен с выходом из второй шифровальной колодки 79. вход в которую соединен с выходом из второго кодового вычислительного устройства 45.
Выход из второго буферного регистра 66 соединен с первым входом третьего электронного колюча 58, выход которого соединен с первым входом синхронизатора цифрового кода 72, выход из которого соединен с первым входом сумматора по модулю два 71. Выход из третьего электронного ключа 58 соединен с входом в четвертую линию задержки 52, выход из которой соединен с вторым входом третьего электронного ключа 58.
Не фиг. 3 приведена подробная схема запросчика 75.
Первый выход первого генератора импульсов 35 соединен с входом первого цифрового счетчика 36, выход из него соединен с входом в кодовое вычислительное устройство 37. Выход из кодового вычислительного устройства 37 соединен с входом в вычитающее устройство 38 и в первую шифровальную колодку 78. Выход из первой шифровальной колодки 78 соединен со вторым входом в первый регистр запросного числа 53. К второму входу вычитающего устройства 38 присоединен выход из декодера ответного сигнала 39. К входу в декодер ответного сигнала 39 присоединен выход из приемника ответного сигнала 40. Второй выход из первого генератора импульсов 35 соединен с входом в синхронизатор по фазе 41. Второй выход из цифрового счетчика 26 соединен с входом в синхронизатор по фазе 41. Сихронизатор по фазе 41 и синхронизатор цифрового кода 42 входят в состав устройства синхронизации 49. Третий выход генератора импульсов 35 соединен с входом во вторую линию задержки 50. Выход из второй линии задержки 50 соединен с входов в первый регистр запросного числа 53. Выход из первой шифровальной колодки 78 соединен со вторым входом первого регистра запросного числа 53. Выход из первого регистра запросного числа 53 соединен с первым входом первого электронного ключа 54, а выход из него соединен с первым входом в кодер запросного числа 59 и с входом в линию задержки 51. Выход из первой линии задержки 51 соединен с вторым входом первого электронного ключа 54. К третьему входу в него присоединен выход из пятой линии задержки 77, первый вход которой соединен с выходом из первого генератора импульсов 35, а второй - предназначен для подачи сигнала «запрос». К выходу из пятой линии задержки 77 также присоединен третий вход кодера запросного числа 50, выход из которого соединен с входом в передатчик 60, выход которого соединен с входом первого антенного коммутатора в которому присоединена судовая приемно-передающая антенна 17 (фиг. 1 и 3).
Обеспечив синхронную работу запросчика и ответчика, связь между устройствами синхронизации 49 и запросчиком 75 можно разрывать.
Если относительную стабильность частоты генератора импульсов 35 и второго генератора импульсов 43 принять равной 2×10-7 4×10-7 (чего можно достичь хорошо известными методами), а частоту повторения импульсов - один импульс в секунду, то расхождение генераторов импульсов 35 и 43 по фазе на одну десятую цикла произойдет по истечении приблизительно 2…4 суток непрерывной работы средств расшифровки сигнала. Таким образом, в течение этого промежутка времени цифровые счетчики 36 и 44 будут показывать одинаковое число, а генераторы импульсов 35 и 43 будут работать в фазе.
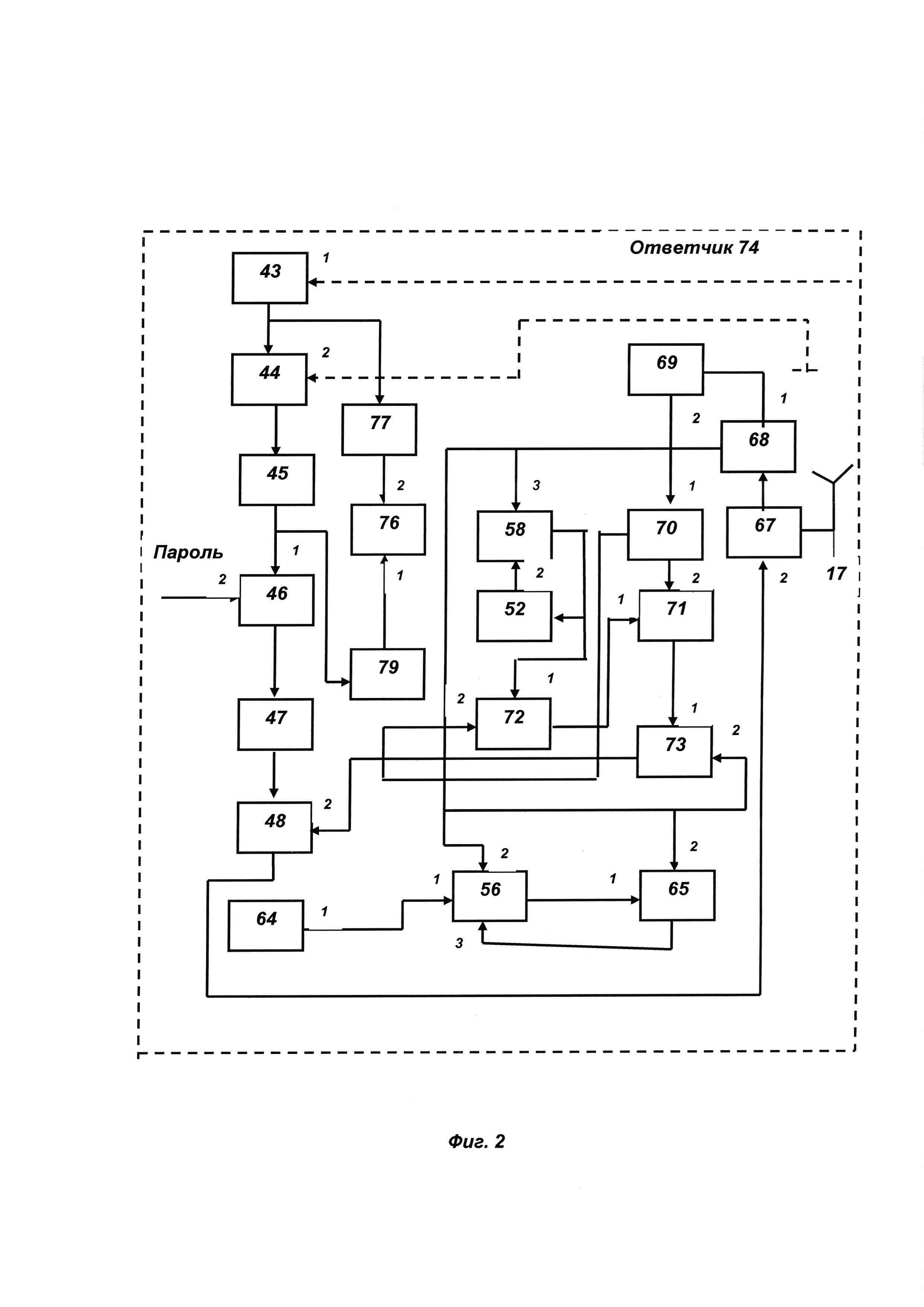
На фиг. 4 приведена конструкция радиолокатора 21.
Радиолокатор 21 содержит основание 80, верхнюю поворотную платформу 81, решетка радиолокатора 82. кронштейн 83. Решетка радиолокатора 82 при помощи цилиндрического шарнира 84 закреплена на верхнем кожухе 85.
Вертикальный вал 86 соединяет привод поворота в горизонтальной плоскости 87 с верхней поворотной платформой 81. Верхнюю поворотную платформу 81 и решетку радиолокатора 82 соединяет привод управления в вертикальной плоскости 88. С цилиндрическим шарниром 84 связан датчик вертикального отклонения 89, а с с приводом поворота в горизонтальной плоскости 87 - датчик азимута 90. Датчики вертикального отклонения 89 и датчик горизонтального отклонения 90 измерительными связями 91 соединены с контроллером датчиков 92. Контроллер радиолокатора 23 линией управления 93 соединен с приводами 87 и 88.
РАБОТА СИСТЕМЫ
При работе системы (фиг. 1) включают одновременно сервер 2, определитель наземный модуль «свой-чужой» 10 и модуль радиолокации 20. При обнаружении радиолокаторами 21 и 22 судна 8 с наземного модуля «свой-чужой» 10 подает сигнал на судно 8. При этом возможны несколько вариантов ответа:
1. Судно, принадлежащее РФ, отвечает на этот вопрос положительно и предает свои данные и координаты полученные от собственной системы Глонасс.При необходимости ему оказывают помощь при сопровождении и проводке в порт назначения.
2. Судно, не принадлежащее РФ и не отвечающие на все виды запросов и сигналов определяется с использованием системы 4ГИС по габаритам, внешнему виду и другим признакам методом сравнения с иностранными гражданскими и военными судами, имеющимися в базе данных ГИС 4D. К иностранным судам применяются меры, предусмотренные регламентом пограничных служб. Система ГИС 4D впервые в мире разработана и запатентована заявителем: Патент РФ №2667793, МПК G08C 21/00, опубл. 24.09.2018 г. и ПРЭВМ:
1. №2017612903 (06.03.2017) «Интегра-Видео»
2. №2014617926 (20.09.2014) Интегра 4D - Тонкий клиент
3. №2014619362(20.10.2014) Интегра-КДД-ОнЛайн
4. №2014660135 (20.10.2014) Интегра Видео-Планета
5. №2016613043 (20.04.2016) Интегра 4D - Карточка
6. №2016613045 (20.04.2016) Сервер авторизации
7. №2014617862 (20.09.2014) Интегра 4D - Планета Земля
8. №2014618366 (20.09.2014) Интегра 4D - Сервер
9. №2014619361 (20.10.2014) Интегра-КДД-Регистратор
10. №2016613044 (20.04.2016) Интегра-Сервер Приложения
3. Система радиолокационного распознавания «свой-чужой» позволяет системам ПВО и самолетам перехватчикам определить, враг или свой объект «засвечивается» на радаре. Это система может «сортировать» цели и направлять ракеты только на объекты противника.
Система работает по следующему принципу. Наземный модуль ГИС 4D подает определенный сигнал, этот сигнал принимает цель и отправляет, или не отправляет ответ.Если ответ получен, и он совпадает с правильным, система распознает цель как «свой». Если ответ не получен или получен неправильный ответ, система распознает цель как «чужой» и объект уничтожается.
При проверке цели на «свой-чужой» могут использоваться не только просто зашифрованные сигналы. Система может быть выполнена таким образом, что попросит неизвестный объект выполнить определенный алгоритм, состоящий из каких-либо математических действий и прислать ответ. Если ответ не совпадает с правильным - объект идентифицируется как «чужой».
Например, с земли на судно передается набор цифр: 1, 3, 5, 7. На судне система «свой-чужой» должна посчитать сумму этих цифр и извлечь из него квадратный корень, а ответ передать обратно. На земле система наземный модуль «свой-чужой» сравнивает ответ с правильным, если ответ неверен подается сигнал тревоги.
В системе «свой-чужой» засекречено все: какие сигналы передаются, что с этими сигналами должен сделать передатчик на судне и каким образом передать ответ.
Например, судно принимает последовательность цифр на одной радиочастоте, обратный ответ он должен передать на другой частоте волн. Коды периодически меняются, они могут меняться раз в день, раз в три дня или в другой определенный промежуток времени.
РАБОТА НАЗЕМНОГО МОДУЛЯ «СВОЙ-ЧУЖОЙ»
Работу системы рассмотрим по структурной схеме, которая изображена на фиг. 2 и 3. Вначале необходимо синхронизировать работу оборудования запросчика 75 (фиг. 3) и ответчика 74 (фиг. 2). Синхронизация осуществляется на Земле перед тем, как объект (например, судно) войдет в контролируемую зону с помощью устройства синхронизации 49. Для чего выход синхронизатора по фазе 41 проводным каналом связи соединяется с вторым генератором импульсов 43, а выход синхронизатора цифрового кода 42 - со вторым входом второго цифрового счетчика 44.
Синхронизатор по фазе 41 может состоять из простой импульсной усилительной схемы, которая усиливает импульсы от ГИ 35 и подает их на вход второго генератора импульсов 43, обеспечивая тем самым синфазную работу генератора импульсов 35 и второго генератора импульсов 43. Синхронизатор цифрового кода 42 может состоять из множества простых усилителей постоянного тока, по одному на каждый разряд цифрового счетчика 36, которые усиливают выходные сигналы и подают их затем к второму цифровому счетчику 44, посредством чего соответствующие каскады второго цифрового счетчика 44 будут в таких же состояниях, что и в цифровом счетчике 36. Обеспечив синхронную работу запросчика и ответчика, связь между устройствами синхронизации 49 и запросчиком 75 можно разрывать.
Если относительную стабильность частоты генератора импульсов 35 и второго генератора импульсов 43 принять равной 2×10-7 - 4×10-7 (чего можно достичь хорошо известными методами), а частоту повторения импульсов - 1 импульс в секунду, то расхождение генераторов импульсов 35 и 43 по фазе на одну десятую цикла произойдет по истечении приблизительно 2-4 суток непрерывной работы.
Электронные средства разведки потенциальных нарушителей не смогут своевременно подать ответ на сигнал системы определения «свой-чужой».
Таким образом, в течение этого промежутка времени цифровые счетчики 36 и 44 будут показывать одинаковое число, а генераторы импульсов 35 и 43 будут работать в фазе.
Информация, характеризующая состояние цифрового счетчика 36 и второго цифрового счетчика 44, подается на входы кодовых вычислительных устройств 37 и второго кодового вычислительного устройства 45 соответственно. КВУ 37 и 45 призваны выполнять последовательность математических и логических операций, таких, чтобы их выходные сигналы стали последовательностью случайно изменяющихся чисел. Эти числа в запросчике 75 подаются на первый вход вычитающего устройства 38 и через вторую шифровальную колодку 78 на второй вход первого регистра запросного числа 53. Импульсом с выхода 3 первого генератора импульсов 35, поступающим через вторую линию задержки 50 на первый вход первого регистра запросного числа 53, информация параллельным кодом может быть переписана в кодере запросного числа 59, если первый электронный ключ 54 открыт.
После включения запросчика 75 состояние первого электронного ключа 54 и второго электронного ключа 55 неоднозначно и оно сохраняется только в первоначальный момент времени. Если после включения запросчика 74 первый электронный ключ 54 открыт, то после первого цикла передачи информации из первого регистра запросного числа 53 в кодер запросного числа 59 импульсом с выхода первого электронного ключа 54 через первую линию задержки 51 первый электронный ключ 54 закрывается и в дальнейшем будет открываться только импульсом с выхода схемы совпадений 76 при формировании запросного сигнала, а если второй электронный ключ 55 окажется отрыт, то импульсы от первого генератора тактовых импульсов 63 поступают на счетчик тактовых импульсов 62. После переполнения первого счетчика тактовых импульсов на его выходе появляется импульс, который поступает на вход 2 второго электронного ключа 55 и закрывает его. Таким образом, в установившемся режиме работы запросчика 75 электронные ключи 54 и 55 закрыты, в первом регистре запросного числа 53 находится сформированное запросное число, которое периодически считывается импульсом с третьего входа генератора импульсов 35, но в кодер запросного числа 59 не поступает (Первый электронный ключ 54 закрыт).
В ответчике 74 в первоначальный момент времени не определено состояние третьего электронного ключа 58 и четвертого электронного ключа 56. Однако после первого цикла передачи информации из второго буферного регистра 66 в регистр пароля 72 через открытый третий электронный ключ 58 импульс с выхода третьего электронного ключа 58 через четвертую линию задержки 52 поступает на второй вход третьего электронного ключа 58 и закрывает его, а четвертый электронный ключ 56 закрывается импульсом с выхода счетчика тактовых импульсов 62, который появляется после его переполнения. Отсюда следует, что в установившемся режиме работы ответчика 74 электронные ключи 58 и 54 закрыты, во втором буфере регистрации 66 находится число (пароль), аналогичное числу, записанному в первом регистре запросного ключа 53 запросчика, которое периодически считывается импульсом с выхода второго генератора импульсов через пятую линию задержки 77, но в регистр пароля 72 не поступает он закрыт.
Информация с выхода второго кодово-вычислительного устройства 45 помимо входа 1 буфера регистрации 66 поступает на вход сумматора 46, на второй вход которого поступает сигнал "пароль" (сигнал, определяющий принадлежность объекта). Суммарный сигнал с выхода сумматора 46 поступает на вход кодирующего устройства 47, которое преобразует его в импульсный или частотный код и передает на первый вход передатчика ответного сигнала 48, но сигнал, поступивший на первый вход передатчика ответного сигнала 48, не излучается, поскольку нет разрешения, которое должно поступить на вход 2 передатчика ответного сигнала 48. Таким образом, система опознавания "свой - чужой" готова к передаче (приему) сигналов "Запрос".
В общем случае момент передачи сигнала "Запрос" определяет оператор или определяется автоматически при появлении в зоне действия запросчика неопознанного объекта.
При поступлении на входы схемы совпадений 76 сигнала "Запрос" и импульса с выхода 3 генератора импульсов 35 на ее выходе появляется импульс, который поступает на вход 3 первого электронного ключа 54 и на вход 3 кодера запросного числа 59, а через третью линию задержки - на вход 2 первого счетчика тактовых импульсов 62 и на вход 3 второго электронного ключа 55. Этим импульсом первый электронный ключ 54 и второй электронный ключ 55 открываются, а элементы первого генератора тактовых импульсов 63 и кодера запросного числа 59 устанавливаются в исходное состояние. Импульс с выхода 3 генератора импульсов 35 через вторую линию задержки 50 поступает на вход первого регистра запросного числа 53 и считывает информацию из него через открытый первый электронный ключ 54 в кодер запросного числа 59. Сигналом с выхода первого электронного ключа 54 через первую линию задержки 51 первый электронный ключ 54 закрывается. Импульсы от первого генератора тактовых импульсов 63 через открытый второй электронный ключ 55 поступают на вход 1 первого счетчика тактовых импульсов и вход 2 КЗЧ кодера запросного числа 59, разрешая передачу сигнала "Запрос". При переполнении первого счетчика тактовых импульсов 62 на его выходе появляется импульс, который закрывает второй электронный ключ 55. С выхода кодера запросного числа 59 сигнал поступает в передатчик 60 и далее в первый антенный коммутатор 61 и антенну 13 (фиг. 3). Процесс передачи сигнала "Запрос" окончен.
Сигнал, излученный антенной запросчика 75, принимается антенной ответчика 74 и через АК 67 поступает на вход второго приемника запросного сигнала 68. С выхода 1 второго приемника запросного сигнала 68 сигнал поступает на вход ДЗЧ 69, а после декодирования - в регистр запросного числа 70. По окончании приема сигнала "Запрос" с выхода 2 приемника запросного сигнала 68 поступает сигнал на вход 3 третьего ЭК 58, вход 2 второго ЭК 56, вход 2 СТИ 65 и вход 2 счетчика совпадений 73. ЭК 58 и 56 открываются, а элементы счетчика совпадений 73 и СТИ 65 устанавливаются в исходное состояние.
Импульсом с выхода второго генератора импульсов ГИ 43, поступающим через пятую линию задержки 77 на вход 2 второго буферного регистратора БР 66, информация из второго буферного регистратора БР 66 через открытый третий электронный ключ ЭК 58 заносится в регистр пароля 72. Сигналом с выхода третьего электронного ключа ЭК 58 через четвертую линию задержки ЛЗ 52, третий электронный ключ ЭК 58 закрывается. Импульсы от первого буферного регистра 64 через открытый ЭК 56 поступают на вход 1 первого приемника запросного сигнала 65, вход 2 регистра пароля РП 72 и вход 2 второго регистра запросного числа РЗЧ 70. Информация из второго регистра запросного числа РЗЧ 70 и регистра пароля РП 72 синхронно поступает на соответствующие входы сумматора по модулю два 71, где происходит сравнение. Результаты сравнения поступают на вход счетчика совпадений 73, при переполнении которого на его выходе появляется импульс, который поступает на вход 2 передатчика ответного сигнала 48 и разрешает передачу ответа на запрос. Сигнал ответа с выхода передатчика ответного сигнала 48 через второй антенный коммутатор АК 67 и антенну 13 излучается в эфир. Сигнал, излученный антенной 17 ответчика 74, принимается антенной запросчика 13 и через первый антенный коммутатор АК 61 поступает на вход приемника ответного сигнала ПрОс 40. С выхода приемника ответного сигнала 40 сигнал поступает в декодер ответного сигнала ДОС 39 и далее на второй вход вычитающего устройства ВУ 38, где из принятого сигнала вычитается выходной сигнал кодового вычитающего устройства КВУ 37. По результату идентифицируется принадлежность объекта и его условный номер.
Если объект не отвечает на сигнал «свой-чужой», то используя данные о его координатах при помощи контроллера радиолокатора 23 (фиг. 4) подают управляющие сигналы на приводы 87 и 88 для сопровождения судна.
Сопровождение судна включает контроль и запись в память компьютера положение судна в виде трехмерной модели в двухмерном плане акватории и возможность восстановить состояние его маршрута в ретроспективе и с определенной долей вероятности в перспективе.
Применение изобретения позволило:
- выполнять сопровождение судов, в которое входит определение их координат в течение длительного времени и построение на экране монитора маршрута движения,
- получить данные по реальной информации, в том числе о внешнем виде обнаруженных судов об их технических характеристиках, их модернизации и переоборудовании во времени с использование данных системы ГИС в формате 4D,
- получить данные по реальной информации, в том числе о внешнем виде обнаруженных судов об их технических характеристиках, их модернизации и переоборудовании во времени с использование данных системы ГИС в формате 4D,
- выполнять сопровождение судов, в которое входит определение их координат в течение длительного времени и построение на экране монитора маршрута движения.
Способ и устройство обеспечения безопасности моста
Способ и устройство управления видеоизображением по координатам местности
Геоинформационная система в формате 4d
Способ и устройство обеспечения безопасности моста
Способ и устройство управления видеоизображением по координатам местности
Устройство для разработки трудноизвлекаемой нефти
Система видеонаблюдения и способ формирования видеоизображения
Интеллектуальная интегрированная система безопасности и способ контроля оператора безопасности
Способ мониторинга работы газоперекачивающего агрегата и устройство для его реализации
Геоинформационная система в формате 4d

