Результат интеллектуальной деятельности: СПОСОБ ДЛЯ КОНТРОЛЯ УСТРОЙСТВА МАГНИТНОГО ПОДШИПНИКА
Вид РИД
Изобретение
Изобретение относится к способу для контроля устройства магнитного подшипника.
Кроме того, изобретение относится к блоку управления со средствами для выполнения подобного способа.
Кроме того, изобретение относится к компьютерной программе для выполнения подобного способа при исполнении в блоке управления.
Изобретение также относится к компьютерному программному продукту с компьютерной программой.
Кроме того, изобретение относится к сенсорному устройству для выполнения подобного способа.
К тому же изобретение относится к устройству магнитного подшипника по меньшей мере с одним магнитным подшипником и по меньшей мере с одним сенсорным устройством.
Изобретение также относится к электрической вращающейся машине по меньшей мере с одним устройством магнитного подшипника.
Подобный способ используется, в частности, в активном магнитном подшипнике быстро вращающейся электрической вращающейся машины, например двигателя, генератора, компрессора или турбины. Например, быстро вращающаяся электрическая вращающаяся машина может приводиться в действие с мощностью по меньшей мере 1 мегаватт и с числом оборотов по меньшей мере 5000 об/мин, однако изобретение не ограничено подобными машинами.
Регулирование положения активного магнитного подшипника осуществляется с помощью измеренных значений положения относительно положения тела вращения. Тело вращения представляет собой, например, ротор электрической вращающейся машины. Измеренные значения положения регистрируются с помощью датчиков расстояния. Регулирование положения получает в качестве входного сигнала положение ротора на основе зарегистрированных датчиками измеренных сигналов. Если датчики расстояния вырабатывают ложные сигналы, то ротор, на основе регулирования положения, удаляется от желательного положения. Необходимо обязательно своевременно распознавать ошибку датчика положения, которая приводит к ложному измерению, например, из-за теплового дрейфа датчика, чтобы исключать зависание в неверном местоположении. Наряду с дрейфом датчика, необходимо компенсировать ошибки измерения на основе расширения тела вращения, например, из-за центробежных сил или температуры, при определении положения тела вращения в активном магнитном подшипнике.
Патент DE 10 2009 039 485 B4 описывает систему регулирования и способ для регулирования магнитного подшипника.
Выложенная заявка DE 42 15 381 A1 описывает устройство с двумя блоками датчиков для регистрации радиального и/или осевого положения вала, которые, соответственно, состоят из по меньшей мере одной пары примерно диаметрально противолежащих датчиков.
Выложенная заявка EP 3 203 191 A1 описывает сенсорное устройство для устройства магнитного подшипника, которое имеет датчик сдвига и сенсорное кольцо.
В основе изобретения лежит задача, усовершенствовать контроль определения положения тела вращения в активном магнитном подшипнике.
Эта задача в соответствии с изобретением решается способом для контроля устройства магнитного подшипника для электрической вращающейся машины, которое имеет первую пару по меньшей мере по существу диаметрально противолежащих датчиков и вторую пару по меньшей мере по существу диаметрально противолежащих датчиков, которые расположены со смещением на угол по отношению к первой паре датчиков, причем, соответственно, измеряется расстояние от датчика до тела вращения, которое расположено в пределах пары датчиков, причем определяется первое среднее расстояние из значений расстояния первой пары датчиков и второе среднее расстояние из значений расстояния второй пары датчиков, причем регистрируются первое изменение первого среднего расстояния и второе изменение второго среднего расстояния, причем изменения средних расстояний сравниваются, при этом, как только разница средних изменений расстояния превышает предельное значение, выдается предупредительный сигнал.
Кроме того, указанная задача в соответствии с изобретением решается посредством блока управления, компьютерной программы, компьютерного программного продукта, сенсорного устройства, устройства магнитного подшипника и электрической вращающейся машины с признаками, указанными в пунктах 9-14 формулы изобретения.
Преимущества и предпочтительные варианты осуществления, приведенные далее в отношении способа, могут быть перенесены, с необходимыми изменениями, на блок управления, компьютерную программу, компьютерный программный продукт, сенсорное устройство, устройство магнитного подшипника и электрическую вращающуюся машину.
В основе изобретения лежит идея, состоящая в том, чтобы в активном магнитном подшипнике, который, в частности, выполнен как радиальный подшипник и/или как осевой подшипник, связывать оценку датчиков двух независимо регулируемых осей датчиков, которые расположены со смещением на угол относительно друг друга, чтобы тем самым как при вращающемся, так и при неподвижном роторе распознавать, вырабатывают ли датчики расстояния ошибочные значения. В случае ошибки, могут вводиться необходимые меры безопасности. Ошибочные значения вырабатываются датчиками, например, в случае, в частности, теплового дрейфа по меньшей мере одного датчика. Из определенных значений расстояния расположенных противоположно друг другу датчиков определяется среднее изменение расстояния по сравнению с сохраненным блоком данных, причем среднее изменение расстояния соответствует полусумме изменений расстояния обоих противолежащих датчиков. Изменение расстояния соответствует разности определенных расстояний измерения и расстояниям блока данных. Предыдущий блок данных основывается, например, на моделировании. Если разность изменений Δd1, Δd2 расстояния превышает предельное значение, то имеет место по меньшей мере одна ошибка датчика. Подобная ошибка датчика определяется, например, посредством сигнала ошибки. Предельное значение следует выбирать таким образом, чтобы избегать ложного срабатывания, но все же надежно предотвращать столкновение тела вращения, например, с улавливающим подшипником.
Термическое или вызванное центробежной силой расширение ротора не создает проблем, так как расширение происходит по меньшей мере по существу равномерно в радиальном направлении. Так как при обнаружении ошибки сравниваются изменения средних расстояний, а не абсолютные значения, способ является простым и устойчивым по отношению к внешним влияниям. За счет комбинированной оценки обеих осей датчиков обеспечивается возможность контроля датчиков без дополнительных сенсорных средств. Поэтому контроль данных с датчиков может быть реализован экономичным и эффективным образом.
С помощью блока управления осуществляется управление осуществлением способа. Средства для осуществления подобного способа включают в себя компьютерную программу и, например, микроконтроллер или другой программируемый логический компонент. Блок управления расположен, например, в сенсорном устройстве.
Выдаваемый предупредительный сигнал реализуется, например, как акустический, оптический и/или электрический сигнал. Электрическая вращающаяся машина представляет собой, например, двигатель, генератор, компрессор или турбину. В частности, может эксплуатироваться электрическая вращающаяся машина с мощностью по меньшей мере 1 мегаватт и числом оборотов по меньшей мере 5000 об/мин.
В предпочтительном варианте осуществления, изменения относятся к предыдущему измерению. Измеренные данные предыдущего измерения являются, особенно по сравнению с моделированием, очень точными, так как при измерении учитываются по меньшей мере постоянные во времени краевые условия и влияния окружающей среды, вследствие чего обеспечивается возможность надежного обнаружения ошибок.
В другом предпочтительном варианте осуществления, предыдущее измерение представляет собой калибровочное измерение. При таком калибровочном измерении тело вращения располагается в опорном положении. За счет этого может выбираться более высокое предельное значение, благодаря чему улучшается надежность обнаружения ошибок.
В предпочтительной форме выполнения, положение тела вращения при калибровочном измерении регулируется таким образом, что расстояния от датчиков до тела вращения равны и соответствуют нормальному расстоянию. За счет позиционирования тела вращения посредине снижается вероятность столкновения, и надежность обнаружения ошибок улучшается.
Особенно предпочтительными являются датчики, выполненные как индуктивные датчики смещения, с помощью которых расстояния регистрируются бесконтактным способом. Индуктивный датчик смещения также упоминается как датчик вихревых токов. Подобные датчики являются очень точными, экономичными и надежными.
В другом предпочтительном варианте осуществления, вторая пара диаметрально противолежащих датчиков расположена с поворотом на угол от 60° до 120° по отношению к первой паре диаметрально противолежащих датчиков. За счет подобного расположения осей датчиков облегчается оценка измерений.
Особенно предпочтительным образом, вторая пара диаметрально противолежащих датчиков расположена по меньшей мере по существу перпендикулярно к первой паре диаметрально противолежащих датчиков. За счет подобного расположения осей датчиков облегчается оценка измерений.
В другой предпочтительной форме выполнения, по меньшей мере один избыточный датчик расположен в области одного из датчиков, причем определяется расстояние по меньшей мере от одного избыточного датчика до тела вращения. С помощью по меньшей мере одного дополнительного датчика, на основе несогласованности сенсорных средств, может обнаруживаться дефектный датчик.
Особенно предпочтительным образом, дефектный датчик обнаруживается посредством сравнения определенных расстояний. Так как для датчиков соответствующих осей и ближайшего соседнего избыточного датчика в отношении удаления от тела вращения справедливы по существу идентичные краевые условия, с помощью сравнения расстояний ближайших соседних датчиков, в частности, может распознаваться ось с дефектным датчиком, и путем переключения регулирования от датчика, соседнего с избыточным датчиком, на избыточный датчик может обнаруживаться сам дефектный датчик. За счет подобной непосредственной идентификации дефектного датчика без дополнительных измерений время простоя электрической вращающейся машины снижается, и тем самым эксплуатационная готовность машины улучшается.
Далее изобретение более подробно описывается и поясняется с помощью изображенных на чертежах примеров выполнения.
На чертежах показано следующее:
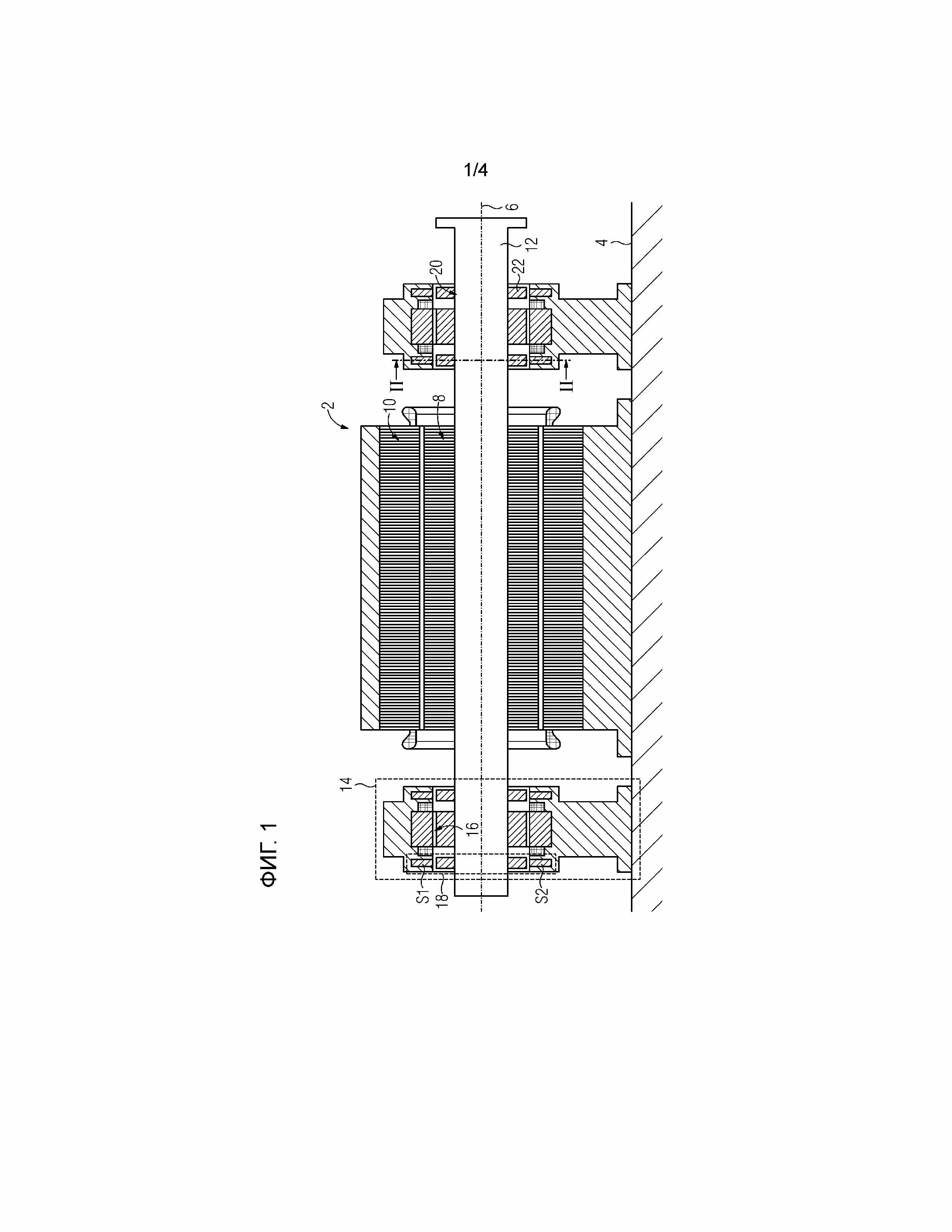
Фиг. 1 - продольное сечение электрической вращающейся машины,
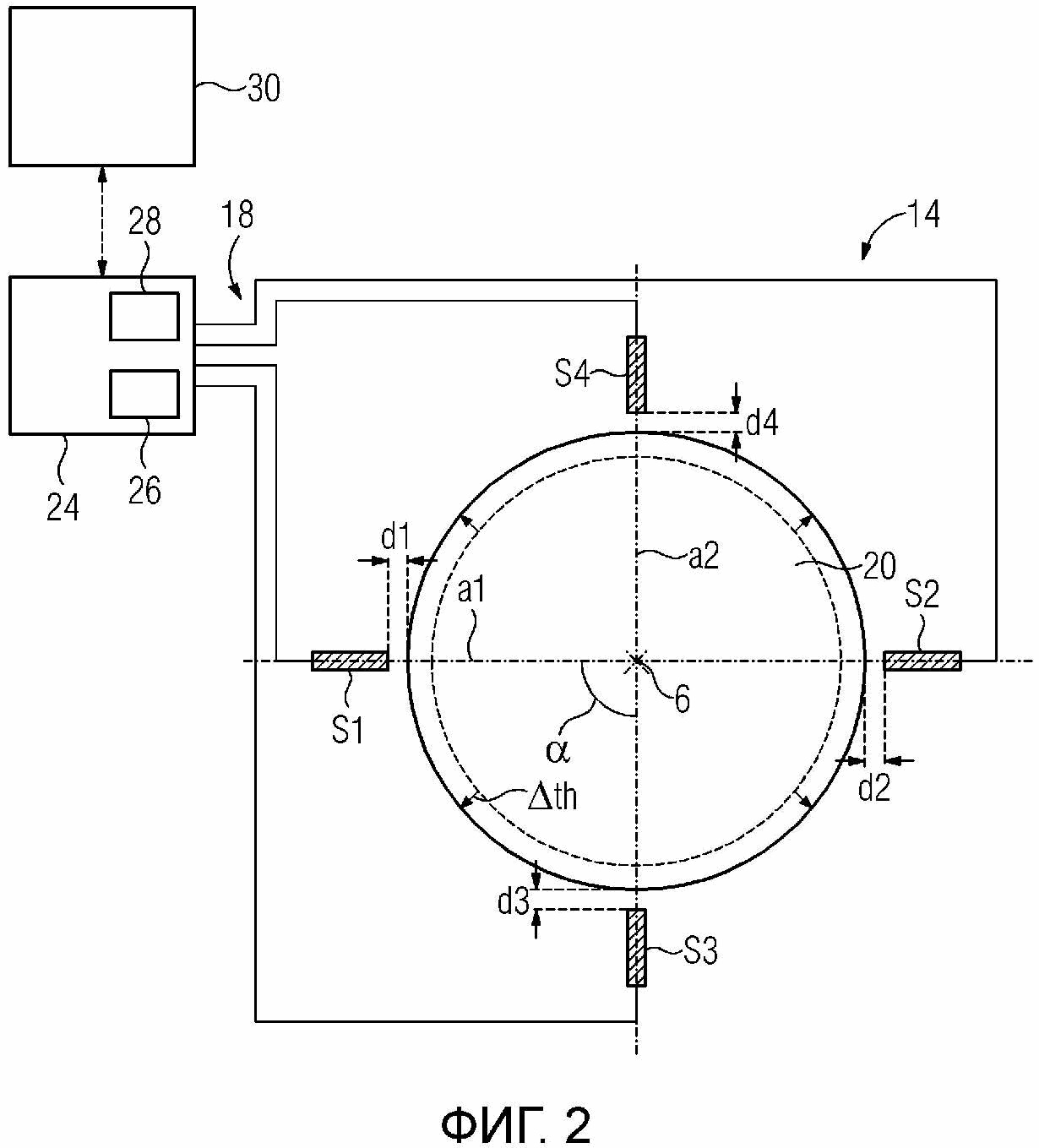
Фиг. 2 - поперечное сечение устройства магнитного подшипника с первой формой выполнения сенсорного устройства,
Фиг. 3 - поперечное сечение устройства магнитного подшипника с первой формой выполнения сенсорного устройства со смещением тела вращения относительно калибровочного измерения и
Фиг. 4 - поперечное сечение устройства магнитного подшипника со второй формой выполнения сенсорного устройства.
Фиг. 1 показывает электрическую вращающуюся машину 2, которая установлена на основании 4. Электрическая вращающаяся машина 2 выполнена как двигатель или генератор и имеет ротор 8, вращающийся вокруг оси 6 вращения, и статор 10, окружающий ротор 8. Вал 12 ротора 8 на обоих осевых концах установлен бесконтактным способом в опорах с помощью соответствующего активного устройства 14 магнитного подшипника. В качестве альтернативы, электрическая вращающаяся машина 2 выполнена как турбина с валом 12, который на осевых концах установлен бесконтактным способом в опорах с помощью соответствующего активного устройства 14 магнитного подшипника.
С помощью сенсорного устройства 18 определяется положение тела вращения 20, причем тело вращения 20 окружает ротор 8 с валом 12. Опционально тело вращения 20 в области сенсорного устройства 18 имеет сенсорное кольцо 22, которое соединено с валом 12. Например, сенсорное кольцо 22 неразъемно соединено с валом 12 или запрессовано на вал 12 в горячем состоянии. Тело вращения 20 имеет по меньшей мере по существу круговое поперечное сечение.
Сенсорное устройство включает в себя расположенные вокруг вала 12 датчики S1, S2, которые выполнены как индуктивные датчики смещения и предназначены для того, чтобы бесконтактным образом регистрировать расстояния от тела вращения 20 до соответствующих датчиков S1, S2. Индуктивные датчики смещения используются, например, для того, чтобы через воздушный зазор измерять импеданс и предпочтительно изменение импеданса.
Устройство 14 магнитного подшипника выполнено в качестве примера как радиальный подшипник. Применение сенсорного устройства 18 для осевого подшипника также является предметом патентной заявки, причем в случае осевого подшипника сенсорное устройство 18 предусмотрено для того, чтобы определять положение тела вращения 20 в осевом направлении.
Фиг. 2 показывает поперечное сечение устройства 14 магнитного подшипника с первой формой выполнения сенсорного устройства 18, причем тело вращения 20 установлено бесконтактным способом в опорах с помощью устройства 14 магнитного подшипника. Сенсорное устройство 18 включает в себя две пары диаметрально противолежащих датчиков S1, S2, S3, S4, которые образуют, соответственно, ось a1, a2, причем вторая ось a2 второй пары S3, S4 расположена повернутой на угол α, примерно равный 90° относительно первой оси a1 первой пары S1, S2. Датчики S1, S2, S3, S4 соединены с центральным блоком 24, который включает в себя блок 26 оценки и блок 28 управления. Передача измеренных данных датчиков на центральный блок 24 осуществляется, например, электрически, в частности, по кабелю или оптически по световоду. Датчики S1, S2, S3, S4 выполнены как индуктивные датчики смещения, с помощью которых бесконтактным способом регистрируются, соответственно, расстояния d1, d2, d3, d4 от соответствующего датчика S1, S2, S3, S4 до тела вращения 20. Определенные данные преобразуются в цифровую форму и по меньшей мере частично отправляются на IT-инфраструктуру 30. IT-инфраструктура 30 представляет собой, например, по меньшей мере одну локальную компьютерную систему или облако и предоставляет место хранения, вычислительную мощность и прикладное программное обеспечение. В облаке, место хранения, вычислительная мощность и прикладное программное обеспечение предоставляются в качестве услуг через Интернет. Цифровая передача данных на IT-инфраструктуру 30 осуществляется беспроводным способом, проводным способом или оптическим способом. Например, данные передаются через Bluetooth или WLAN.
Для проверки того, выдает ли датчик ложное значение, определяется первое среднее расстояние из значений расстояния первой пары датчиков S1, S2 и второе среднее расстояние из значений расстояния второй пары датчиков S3, S4, причем регистрируется первое изменение Δd1 первого среднего расстояния и второе изменение Δd2 второго среднего расстояния по сравнению с предыдущим измерением. Затем изменения Δd1, Δd2 средних расстояний сравниваются, при этом, как только разность изменений расстояния Δd1, Δd2 превышает предельное значение, выдается предупредительный сигнал. Предельное значение следует выбирать таким образом, чтобы избегать ложного срабатывания, но все же надежным образом препятствовать столкновению тела вращения 20, например, с улавливающим подшипником.
Предупредительный сигнал реализуется, например, как акустический, оптический и/или электрический сигнал, причем при выдаче предупредительного сигнала, например электрическая вращающаяся машина 2 переводится в безопасное состояние.
Возникающее во время работы электрической вращающейся машины термическое расширение Δth, т.е. обусловленное нагреванием ротора 8 небольшое, но равномерное увеличение поперечного размера тела вращения, не создает проблем для вышеописанного контроля, потому что сравниваются изменения Δd1, Δd2 средних расстояний, но не осуществляется сравнение абсолютных значений. Возможно применение к осевому подшипнику. В остальном выполнение устройства 14 магнитного подшипника согласно фиг. 2 соответствует таковому согласно фиг. 1.
Фиг. 3 показывает поперечное сечение устройства 14 магнитного подшипника с первой формой выполнения сенсорного устройства 18 и со смещением V тела вращения 20 относительно калибровочного измерения. Смещение V тела вращения 20 очень мало по сравнению с кривизной по существу круговой формы поверхности тела вращения 20 в окружном направлении, так что поверхность тела вращения 20 в области смещения V можно принимать в качестве по существу прямой.
Положение тела вращения 20 при калибровочном измерении регулировалось таким образом, что расстояния d1, d2, d3, d4 от датчиков S1, S2, S3, S4 до тела вращения 20 равны и соответствуют нормальному расстоянию d0. Ось 6 вращения тела вращения 20 сдвинута относительно первой оси a1 на x в направлении первого датчика S1 и относительно второй оси a2 на y в направлении четвертого датчика S4. Кроме того, с момента калибровочного измерения произошло расширение Δth ротора. Примерная ошибка измерения в первом датчике S1 моделируется значением ε ошибки.
Датчики S1, S2, S3, S4 выдают следующие расстояния d1, d2, d3, d4 по сравнению с нормальным расстоянием d0:
Отсюда получаются следующие средние изменения расстояния Δd1, Δd2:

Сравнение средних расстояний Δd1, Δd2 показывает, что имеет место ошибка датчика, так как первое среднее расстояние Δd1 отличается от второго среднего расстояния Δd2 на ±ε/2.
Кроме того, расчет показывает, что способ нечувствителен к, возможно, даже желательному смещению V тела вращения 20. Термическое расширение Δth ротора при обнаружении ошибки датчика посредством сравнения изменений Δd1, Δd2 средних расстояний не создает проблем, потому что расширение Δth ротора происходит во всех направлениях равномерно. Если бы опорное измерение не было вышеописанным калибровочным измерением, то есть расстояния d1, d2, d3, d4 от датчиков S1, S2, S3, S4 до тела вращения 20 к моменту времени калибровки не равны d0, то способ все равно функционировал бы, так как сравниваются изменения средних расстояний Δd1, Δd2. В остальном выполнение устройства 14 магнитного подшипника согласно фиг. 3 соответствует таковому согласно фиг. 1.
Фиг. 4 показывает поперечное сечение устройства 14 магнитного подшипника со второй формой выполнения сенсорного устройства 18. С датчиками S1, S2, S3, S4 сопоставлен, соответственно, избыточный датчик R1, R2, R3, R4, чтобы на основе возможной несогласованности сенсорных средств непосредственно обнаруживать некорректно работающий датчик. Избыточные датчики R1, R2, R3, R4 расположены попарно диаметрально противоположно, причем пары образуют, соответственно, ось. Оси a3, a4 избыточных датчиков R1, R2, R3, R4 расположены с поворотом на угол смещения β в области до 10° относительно осей a1, a2 датчиков S1, S2, S3, S4. Для датчиков S1, S2, S3 S4 и их ближайших соседних избыточных датчиков R1, R2, R3, R4 относительно удаления от тела вращения 20 справедливы по существу идентичные краевые условия.
Расстояния e1, e2, e3, e4 от избыточных датчиков R1, R2, R3, R4 до тела вращения 20 определяются, причем обнаруживается дефектный датчик S1, S2, S3, S4, R1, R2, R3, R4 путем сравнения определенных расстояний d1, d2, d3, d4, e1, e2, e3, e4. В остальном выполнение устройства 14 магнитного подшипника согласно фиг. 4 соответствует таковому согласно фиг. 2.
Таким образом, изобретение относится к способу для контроля устройства 14 магнитного подшипника для электрической вращающейся машины 2. Для того чтобы улучшить контроль определения положения тела вращения в активном магнитном подшипнике, предлагается, что устройство 14 магнитного подшипника имеет первую пару по меньшей мере по существу диаметрально противолежащих датчиков S1, S2 и вторую пару по меньшей мере по существу диаметрально противолежащих датчиков S3, S4, которые расположены со смещением на угол α относительно первой пары датчиков S1, S2, причем измеряется, соответственно, расстояние d1, d2, d3, d4 от датчика S1, S2, S3, S4 до тела вращения 20, которое расположено в пределах пары датчиков S1, S2, S3, S4, причем определяется первое среднее расстояние из значений расстояния первой пары датчиков S1, S2 и второе среднее расстояние из значений расстояния второй пары датчиков S3, S4, причем регистрируется первое изменение Δd1 первого среднего расстояния и второе изменение Δd2 второго среднего расстояния, причем изменения Δd1, Δd2 средних расстояний сравниваются, при этом, как только разность средних изменений Δd1, Δd2 расстояния превышает предельное значение, выдается предупредительный сигнал.
Способ автоматизированного ремонта детали машин
Установка для добычи на месте содержащего углеводороды вещества
Газовая турбина, снабженная предохранительной пластиной между ножкой лопатки и диском
Способ и устройство для бесконтактного определения температуры т металлического расплава
Быстродействующее переключающее устройство для аккумуляторной батареи высокой мощности в изолированной сети постоянного тока
Регулятор трехфазного тока
Способ функционирования прокатного стана холодной прокатки с улучшенной динамикой
Гамма/гамма' -суперсплав на основе никеля с многочисленными реакционно-активными элементами и применение указанного суперсплава в сложных системах материалов
Преобразующая энергию текучей среды машина
Система с газонепроницаемым измерительным вводом

