Результат интеллектуальной деятельности: ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С УЛУЧШЕННЫМИ ЗАКРЫВАЮЩИМИ КОНСТРУКЦИЯМИ
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и в различных вариантах осуществления к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами.
Сшивающий инструмент может включать в себя две взаимодействующие удлиненные бранши, каждая из которых выполнена с возможностью введения в тело пациента и расположения относительно сшиваемой и/или разрезаемой ткани. В различных вариантах осуществления одна из браншей может поддерживать кассету со скобами с, по меньшей мере, двумя содержащимися в ней рядами скоб, расположенными в боковом направлении, и вторая бранша может поддерживать упор с формирующими скобу углублениями, совмещенными с рядами скоб в кассете со скобами. По существу, сшивающий инструмент может дополнительно включать в себя стержень-толкатель и лезвие скальпеля, которые выполнены с возможностью перемещения относительно браншей для последовательного выталкивания скоб из кассеты со скобами посредством кулачковых поверхностей на стержне-толкателе и/или кулачковых поверхностей на клиновидных салазках, которые проталкиваются стержнем-толкателем. По меньшей мере, в одном варианте осуществления кулачковые поверхности выполнены с возможностью приведения в движение множества выталкивателей скоб, находящихся в кассете и связанных со скобами, чтобы проталкивать скобы к упору и формировать расположенные в боковом направлении ряды деформированных скоб в ткани, зажатой между браншами. По меньшей мере, в одном варианте осуществления лезвие скальпеля может следовать по кулачковым поверхностям и разрезать ткань вдоль линии между рядами скоб. Примеры подобных сшивающих инструментов описаны в патенте США № 7,794,475, озаглавленном SURGICAL STAPLES HAVING COMPRESSIBLE OR CRUSHABLE MEMBERS FOR SECURING TISSUE THEREIN AND STAPLING INSTRUMENTS FOR DEPLOYING THE SAME, полное описание которого включено в настоящий документ путем ссылки.
Изложенное выше описание предназначено лишь для иллюстрации различных аспектов соответствующей технологии в области применения изобретения в настоящее время, и его не следует рассматривать как ограничение объема формулы изобретения.
Краткое описание графических материалов
Различные элементы вариантов осуществления, описанные в настоящем документе, наряду с их преимуществами, могут быть понятны после изучения представленного ниже описания вместе с сопроводительными чертежами, причем:
на ФИГ. 1 представлен вид в перспективе варианта осуществления хирургического инструмента с электропитанием, содержащего ручку, ствол и шарнирно поворачиваемый концевой эффектор;
на ФИГ. 2 представлен вид в перспективе варианта осуществления хирургического инструмента с ручным управлением, содержащего ручку, ствол и шарнирно поворачиваемый концевой эффектор;
на ФИГ. 3 представлен вид в перспективе варианта осуществления хирургического инструмента, содержащего корпус, ствол и шарнирно поворачиваемый концевой эффектор, который выполнен с возможностью применения с системой с роботизированным управлением;
на ФИГ. 4 представлен вид в перспективе варианта осуществления хирургической системы с роботизированным управлением;
на ФИГ. 5 представлен вид в перспективе варианта осуществления шарнирно поворачиваемого хирургического концевого эффектора;
на Фиг. 6 представлен вид в перспективе с пространственным разделением компонентов шарнирно поворачиваемого хирургического концевого эффектора, показанного на ФИГ. 5;
на ФИГ. 7 представлен вид в перспективе удлиненного канала хирургического концевого эффектора, показанного на ФИГ. 5 и 6;
на ФИГ. 8 представлен вид сверху удлиненного канала, показанного на ФИГ. 7;
на ФИГ. 9 представлен вид сбоку вертикальной проекции удлиненного канала, показанного на ФИГ. 7 и 8;
на ФИГ. 10 представлен вид сверху упора хирургического концевого эффектора, показанного на ФИГ. 5 и 6;
на ФИГ. 11 представлен вид сбоку в вертикальной проекции упора, показанного на ФИГ. 10;
на ФИГ. 12 представлен вид в поперечном сечении хирургического концевого эффектора, показанного на ФИГ. 5 и 6, с упором в открытом положении;
на ФИГ. 13 представлен вид сбоку в поперечном сечении хирургического концевого эффектора, показанного на ФИГ. 12, с упором в закрытом положении и пусковым элементом в неактивированном исходном положении;
на ФИГ. 14 представлен вид в перспективе варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 15 представлен вид в перспективе в поперечном сечении узла направляющей пусковой штанги, показанного на ФИГ. 14;
на ФИГ. 16 представлен частичный вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 11 и 12;
на ФИГ. 17 представлен вид сверху хирургического концевого эффектора, показанного на ФИГ. 16;
на ФИГ. 18 представлен вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 16 и 17, шарнирно повернутого в первом направлении FD;
на ФИГ. 19 представлен вид сверху хирургического концевого эффектора, показанного на ФИГ. 18;
на ФИГ. 20 представлен вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 16 и 17, шарнирно повернутого во втором направлении SD;
на ФИГ. 21 представлен вид сверху хирургического концевого эффектора, показанного на ФИГ. 20;
на ФИГ. 22 представлено схематичное сравнение диапазонов движения двух хирургических концевых эффекторов в тазовой области человека;
на ФИГ. 23 представлен вид сбоку в вертикальной проекции со сравнением проксимальных мертвых зон (PDZ) двух хирургических концевых эффекторов;
на ФИГ. 24 представлен вид в перспективе другого варианта осуществления шарнирно поворачиваемого хирургического концевого эффектора;
на ФИГ. 25 представлен вид в перспективе с пространственным разделением компонентов хирургического концевого эффектора, показанного на ФИГ. 24;
на ФИГ. 26 представлен частичный вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 24 и 25;
на ФИГ. 27 представлен другой частичный вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 24-26, шарнирно повернутого в первом направлении (FD);
на ФИГ. 28 представлен другой вид в перспективе хирургического концевого эффектора, показанного на ФИГ. 27, шарнирно повернутого во втором направлении (SD);
на ФИГ. 29 представлен вид сверху концевого эффектора, показанного на ФИГ. 24 и 25;
на ФИГ. 30 представлен другой вид сверху концевого эффектора, показанного на ФИГ. 29, шарнирно повернутого в первом направлении (FD);
на ФИГ. 31 представлен другой вид сверху хирургического концевого эффектора, показанного на ФИГ. 29, шарнирно повернутого во втором направлении (SD);
на ФИГ. 32 представлен другой вид сверху части хирургического концевого эффектора, показанного на ФИГ. 29;
на ФИГ. 33 представлен увеличенный вид сверху части хирургического концевого эффектора, показанного на ФИГ. 32;
на ФИГ. 34 представлен увеличенный вид сверху части другого варианта осуществления хирургического концевого эффектора;
на ФИГ. 35 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 36 представлен вид сверху хирургического инструмента, показанного на ФИГ. 35;
на ФИГ. 37 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 35 и 36, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 38 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 39 представлен вид сверху хирургического инструмента, показанного на ФИГ. 38;
на ФИГ. 40 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 38 и 39, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 41 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 42 представлен вид в сборе с пространственным разделением компонентов части хирургического инструмента, показанного на ФИГ. 41;
на ФИГ. 43 представлен другой вид в сборе с пространственным разделением компонентов части хирургического инструмента, показанного на ФИГ. 41 и 42;
на ФИГ. 44 представлен вид сверху части хирургического инструмента, показанного на ФИГ. 41-43;
на ФИГ. 45 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 41-44, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 46 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 47 представлен вид сверху хирургического инструмента, показанного на ФИГ. 46;
на ФИГ. 48 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 46 и 47, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 49 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 50 представлен вид сверху хирургического инструмента, показанного на ФИГ. 49;
на ФИГ. 51 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 49 и 50, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 52 представлен частичный вид в перспективе варианта осуществления опорного узла пусковой штанги;
на ФИГ. 53 представлен вид в перспективе части варианта осуществления хирургического инструмента;
на ФИГ. 54 представлен вид в сборе с пространственным разделением компонентов части хирургического инструмента, показанного на ФИГ. 53;
на ФИГ. 55 представлен вид в перспективе участка проксимального концевого соединителя удлиненного канала варианта осуществления концевого эффектора;
на ФИГ. 56 представлен вид сверху части хирургического инструмента, показанного на ФИГ. 53-55;
на ФИГ. 57 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 53-56, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 58 представлен вид в перспективе шарнирно повернутого хирургического инструмента, показанного на ФИГ. 57;
на ФИГ. 59 представлен вид в перспективе части другого варианта осуществления хирургического инструмента;
на ФИГ. 60 представлен вид в сборе с пространственным разделением компонентов части хирургического инструмента, показанного на ФИГ. 59;
на ФИГ. 61 представлен вид сверху части хирургического инструмента, показанного на ФИГ. 59 и 60;
на ФИГ. 62 представлен вид сверху хирургического инструмента, показанного на ФИГ. 59-61, концевой эффектор которого находится в шарнирно повернутом положении;
на ФИГ. 63 представлен вид в перспективе хирургического инструмента, показанного на ФИГ. 62;
на ФИГ. 64 представлен вид в перспективе варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 65 представлен вид в перспективе другого варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 66 представлен вид снизу в перспективе узла направляющей пусковой штанги, показанного на ФИГ. 65;
на ФИГ. 67 представлен вид в перспективе в поперечном сечении узла направляющей пусковой штанги, показанного на ФИГ. 65 и 66;
на ФИГ. 68 представлен вид в перспективе другого варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 69 представлен вид в сборе с пространственным разделением компонентов узла направляющей пусковой штанги, показанного на ФИГ. 68;
на ФИГ. 70 представлен вид в перспективе другого варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 71 представлен вид в перспективе другого варианта осуществления узла направляющей пусковой штанги;
на ФИГ. 72 представлен вид в перспективе другого варианта осуществления хирургического инструмента;
на ФИГ. 73 представлен вид в перспективе в поперечном сечении части сменного узла ствола хирургического инструмента, показанного на ФИГ. 72;
на ФИГ. 74 представлен частичный вид в перспективе части сменного узла ствола, показанного на ФИГ. 72;
на ФИГ. 75 представлен вид в сборе с пространственным разделением компонентов части сменного узла ствола, показанного на ФИГ. 72-74;
на ФИГ. 76 представлен частичный вид в поперечном сечении сменного узла ствола, показанного на ФИГ. 72-75;
на ФИГ. 77 представлен другой частичный вид в поперечном сечении сменного узла ствола, показанного на ФИГ. 72-76;
на ФИГ. 78 представлены виды сбоку в вертикальной проекции концевого эффектора хирургического инструмента, показанного на ФИГ. 72, с упором в открытом положении и в закрытом положении;
На ФИГ. 79 представлен вид сверху участка хирургического инструмента, изображенного на ФИГ. 72. и
на ФИГ. 80 представлен другой вид сверху хирургического инструмента, показанного на ФИГ. 79, концевой эффектор которого показан в шарнирно повернутом положении.
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Примеры, представленные в настоящем документе, в одной форме иллюстрируют некоторые варианты осуществления настоящего изобретения, и такие примеры не следует рассматривать как каким-либо образом ограничивающие объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/782,295, озаглавленная Articulatable Surgical Instruments With Conductive Pathways For Signal Communication, в настоящее время публикация заявки на патент США № 2014/0246471;
- заявка на патент США № 13/782,323, озаглавленная Rotary Powered Articulation Joints For Surgical Instruments, в настоящее время патентная публикация США № 2014/0246472;
- заявка на патент США № 13/782,338, озаглавленная Thumbwheel Switch Arrangements For Surgical Instruments, в настоящее время патентная публикация США № 2014/0249557;
- заявка на патент США № 13/782,499, озаглавленная Electromechanical Surgical Device with Signal Relay Arrangement, в настоящее время публикация заявки на патент США № 2014/0246474;
- заявка на патент США № 13/782,460, озаглавленная Multiple Processor Motor Control for Modular Surgical Instruments, в настоящее время публикация заявки на патент США № 2014/0246478;
- заявка на патент США № 13/782,358, озаглавленная Joystick Switch Assemblies For Surgical Instruments, в настоящее время патентная публикация США № 2014/0246477;
- заявка на патент США № 13/782,481, озаглавленная Sensor Straightened End Effector During Removal Through Trocar, в настоящее время публикация заявки на патент США № 2014/0246479;
- заявка на патент США № 13/782,518, озаглавленная Control Methods for Surgical Instruments with Removable Implement Portions, в настоящее время публикация заявки на патент США № 2014/0246475;
- заявка на патент США № 13/782,375, озаглавленная Rotary Powered Surgical Instruments With Multiple Degrees of Freedom, в настоящее время публикация заявки на патент США № 2014/0246473; и
- заявка на патент США № 13/782,536, озаглавленная Surgical Instrument Soft Stop, в настоящее время публикация заявки на патент США № 2014/0246476.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/803,097, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE, в настоящее время публикация заявки на патент США № 2014/0263542;
- заявка на патент США № 13/803,193, озаглавленная CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263537;
- заявка на патент США № 13/803,053, озаглавленная INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263564;
- заявка на патент США № 13/803,086, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время публикация заявки на патент США № 2014/0263541;
- заявка на патент США № 13/803,210, озаглавленная SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263538;
- заявка на патент США № 13/803,148, озаглавленная MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0263554;
- заявка на патент США № 13/803,066, озаглавленная DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263565;
- заявка на патент США № 13/803,117, озаглавленная ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263553;
- заявка на патент США № 13/803,130, озаглавленная DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263543; и
- заявка на патент США № 13/803,159, озаглавленная METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT, в настоящее время патентная публикация США № 2014/0277017.
Заявителю настоящей заявки принадлежит представленная ниже заявка на патент, поданная 7 марта 2014 г., которая полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/200,111, озаглавленная CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS, в настоящее время патентная публикация США № 2014/0263539.
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 26 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/226,106, озаглавленная POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,099, озаглавленная STERILIZATION VERIFICATION CIRCUIT;
заявка на патент США № 14/226,094, озаглавленная VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT;
заявка на патент США № 14/226,117, озаглавленная POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROL;
заявка на патент США № 14/226,075, озаглавленная MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES;
заявка на патент США № 14/226,093, озаглавленная FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,116, озаглавленная SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION;
заявка на патент США № 14/226,071, озаглавленная SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR;
заявка на патент США № 14/226 097, озаглавленная SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS;
заявка на патент США № 14/226,126, озаглавленная INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,133, озаглавленная MODULAR SURGICAL INSTRUMENT SYSTEM;
заявка на патент США № 14/226,081, озаглавленная SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT;
заявка на патент США № 14/226,076, озаглавленная POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTECTION;
заявка на патент США № 14/226,111, озаглавленная SURGICAL STAPLING INSTRUMENT SYSTEM; и
заявка на патент США № 14/226,125, озаглавленная SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 5 сентября 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/479,103, озаглавленная CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE;
- заявка на патент США № 14/479,119, озаглавленная ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION;
- заявка на патент США № 14/478,908, озаглавленная MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION;
- заявка на патент США № 14/478,895, озаглавленная MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSORʹS OUTPUT OR INTERPRETATION;
- заявка на патент США № 14/479,110, озаглавленная USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE;
- заявка на патент США № 14/479,098, озаглавленная SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION;
- заявка на патент США № 14/479,115, озаглавленная MULTIPLE MOTOR CONTROL FOR POWERED MEDICAL DEVICE; и
- заявка на патент США № 14/479,108, озаглавленная LOCAL DISPLAY OF TISSUE PARAMETER STABILIZATION.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 9 апреля 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/248,590, озаглавленная MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305987;
- заявка на патент США № 14/248,581, озаглавленная SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT, в настоящее время публикация заявки на патент США № 2014/0305989;
- заявка на патент США № 14/248,595, озаглавленная SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305988;
- заявка на патент США № 14/248,588, озаглавленная POWERED LINEAR SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309666;
- заявка на патент США № 14/248,591, озаглавленная TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305991;
- заявка на патент США 14/248,584, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305994;
- заявка на патент США № 14/248,587, озаглавленная POWERED SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309665;
- заявка на патент США № 14/248,586, озаглавленная DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305990; и
- заявка на патент США № 14/248,607, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2014/0305992.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 16 апреля 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- предварительная заявка на патент США № 61/812,365, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR;
- предварительная заявка на патент США № 61/812,376, озаглавленная LINEAR CUTTER WITH POWER;
- предварительная заявка на патент США № 61/812,382, озаглавленная LINEAR CUTTER WITH MOTOR AND PISTOL GRIP;
- предварительная заявка на патент США № 61/812,385, озаглавленная SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS AND MOTOR CONTROL; и
- предварительная заявка на патент США № 61/812,372, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE END EFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING MEMBER; Досье патентного поверенного № END7415USNP/140289;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING LOCKABLE SYSTEMS; Досье патентного поверенного № END7416USNP/140291;
- заявка на патент США № _______, озаглавленная DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS, досье патентного поверенного № END7418USNP/140292;
- заявка на патент США № _______, озаглавленная LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITH ARTICULATABLE SURGICAL END EFFECTORS, досье патентного поверенного № END7417USNP/140293;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE, Досье патентного поверенного № END7485USNP/140295;
заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7489USNP/140299;
заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVED FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7491USNP/140301;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM; Досье патентного поверенного № END7492USNP/140302; и
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLE ARTICULATION SYSTEM; Досье патентного поверенного № END7494USNP/140304;
В настоящем документе приведены подробные сведения, необходимые для понимания общей конструкции, функциональности, особенностей изготовления и применения различных вариантов осуществления, описание которых предоставлено в спецификации и проиллюстрировано сопроводительными чертежами. Хорошо известные принципы работы, компоненты и элементы не получили в настоящем документе подробного описания, чтобы не затруднять понимание вариантов осуществления, описанных в спецификации. Читатель должен понимать, что варианты осуществления, описанные и проиллюстрированные в настоящем документе, являются не имеющими ограничительного характера примерами. Следует понимать, что определенные конструктивные и функциональные особенности, описанные в данном документе, могут иметь показательный или пояснительный характер. Изменения и модификации вариантов осуществления, описанных и проиллюстрированных в данном документе, могут выполняться в пределах объема формулы изобретения.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий»), «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. В результате, хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к участку, расположенному ближе всего к врачу, а термин «дистальный» относится к участку, удаленному от врача. Предлагается также для удобства и ясности применительно к рисункам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
Для выполнения лапароскопических и минимально инвазивных хирургических вмешательств предложены различные примеры устройств и способов. Однако читателю будет вполне понятно, что различные способы и устройства, описанные в настоящем документе, можно применять в множестве хирургических вмешательств и сфер применения, включая, например, те, что связаны открытыми оперативными вмешательствами. При изучении данного подробного описания читатель сможет дополнительно оценить, что разнообразные инструменты, описанные в данном документе, можно вводить в тело любым способом - как через естественные отверстия, так и через разрез или пункционное отверстие, проделанное в тканях, и т. п. Рабочие части или части концевых эффекторов таких инструментов можно вводить непосредственно в тело пациента или через устройство доступа, которое имеет рабочий канал, через который можно проводить концевой эффектор и удлиненный ствол хирургического инструмента.
Хирургическая сшивающая система может содержать ствол и концевой проходящий от ствола эффектор. Концевой эффектор может включать первую браншу и вторую браншу. Первая бранша содержит кассету со скобами. Кассета со скобами выполнена с возможностью вставки в первую браншу и удаления из нее; однако предусмотрены другие варианты осуществления, в которых кассета со скобами выполнена без возможности извлечения из первой бранши или, по меньшей мере, выполнена с возможностью быстрой замены из первой бранши. Вторая бранша содержит упор, выполненный с возможностью деформации скоб, выталкиваемых из кассеты со скобами. Вторая бранша выполнена с возможностью поворота относительно первой бранши вокруг оси закрытия; однако предусмотрены другие варианты осуществления, в которых первая бранша выполнена с возможностью поворота относительно второй бранши. Хирургическая сшивающая система дополнительно содержит шарнирное сочленение, выполненное с возможностью обеспечения вращения или шарнирного поворота концевого эффектора относительно ствола. Концевой эффектор выполнен с возможностью вращения вокруг оси шарнирного сочленения, проходящей через шарнирное сочленение. Предусмотрены другие варианты осуществления, которые не включают шарнирное сочленение.
Кассета со скобами содержит корпус кассеты. Корпус кассеты включает проксимальный конец, дистальный конец и платформу, проходящую между проксимальным концом и дистальным концом. В процессе применения кассета со скобами расположена на первой стороне ткани, подлежащей сшиванию, а упор расположен на второй стороне ткани. Упор перемещается к кассете со скобами для сжатия и прижимания ткани к платформе. После этого скобы, хранящиеся в корпусе кассеты с возможностью извлечения, можно размещать в ткани. Корпус кассеты включает сформированные в нем полости для скоб, при этом скобы хранятся в полостях для скоб с возможностью извлечения. Полости для скоб расположены в шесть продольных рядов. Три ряда полостей для скоб расположены на первой стороне продольного паза, и три ряда полостей для скоб расположены на второй стороне продольного паза. Возможны другие конструкции скоб и полостей для скоб.
В корпусе кассеты скобы поддерживаются с помощью выталкивателей скоб. Выталкиватели выполнены с возможностью перемещения между первым или неактивированным положением и вторым или активированным положением для выталкивания скоб из полостей для скоб. Выталкиватели удерживаются в корпусе кассеты с помощью фиксатора, который проходит вокруг нижней части корпуса кассеты и включает упругие элементы, выполненные с возможностью захвата корпуса кассеты и удерживания фиксатора относительно корпуса кассеты. Выталкиватели выполнены с возможностью перемещения между их неактивированными положениями и активированными положениями с помощью салазок. Салазки выполнены с возможностью перемещения между проксимальным положением, смежным с проксимальным концом, и дистальным положением, смежным с дистальным концом. Салазки содержат множество наклонных поверхностей, выполненных с возможностью скольжения под выталкивателями и подъема выталкивателей и поддерживаемых на них скоб к упору.
В дополнение к указанному выше, салазки перемещаются дистально с помощью пускового элемента. Пусковой элемент выполнен с возможностью контакта с салазками и проталкивания салазок к дистальному концу. Продольный паз, сформированный в корпусе кассеты, выполнен с возможностью приема пускового элемента. Упор также включает паз, выполненный с возможностью приема пускового элемента. Пусковой элемент дополнительно содержит первый кулачок, который взаимодействует с первой браншей, и второй кулачок, который взаимодействует со второй браншей. При выдвижении пускового элемента дистально первый кулачок и второй кулачок позволяют контролировать расстояние, или тканевый зазор, между платформой кассеты со скобами и упором. Пусковой элемент также содержит скальпель, выполненный с возможностью рассечения ткани, захваченной между кассетой со скобами и упором. Желательно, по меньшей мере, частично располагать скальпель проксимально по отношению к наклонным поверхностям таким образом, чтобы скобы выталкивались раньше скальпеля.
На ФИГ. 1 показан пример приводимого в движение двигателем (или «силового») хирургического инструмента 10, который включает корпус 20, узел 100 удлиненного ствола и концевой эффектор 200, функционально соединенный с узлом 100 удлиненного ствола. Как показано на фигуре, концевой эффектор 200 выполнен с возможностью функционирования в качестве эндокатера для фиксации, рассечения и сшивания скобами ткани. Однако следует понимать, что различные варианты осуществления могут включать в себя концевые эффекторы, выполненные с возможностью функционирования в качестве других хирургических устройств, включая, например, зажимы, режущие инструменты, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства доставки препаратов лекарственной/генной терапии, ультразвуковые, РЧ и/или лазерные устройства и т. п. Как указано выше и будет дополнительно описано ниже, различные участки хирургического инструмента 10 приводятся в действие двигателем. Дополнительную информацию по многим аспектам приводимых в действие двигателем компонентов хирургического инструмента 10 можно найти, например, в заявке на патент США № 13/803,086, озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, публикации заявки на патент США № 2014/0263541, которые полностью включены в настоящий документ путем ссылки. Однако следует понимать, что различные конструкции концевого эффектора, описанные в настоящем документе, могут также успешно применяться в сочетании с портативными корпусами (ручками), которые содержат «ручные» (т. е. не приводимые в действие двигателем (-ями)) приводную и закрывающую системы, такие как системы, описанные в упомянутой выше публикации заявки на патент США № 2014/0263541, включенной в настоящий документ. Например, на ФИГ. 2 показан концевой эффектор 200, присоединенный к узлу 100ʹ удлиненного ствола, который функционально соединен с корпусом 20ʹ хирургического инструмента 10ʹ, который функционально поддерживает ручные закрывающую и пусковую системы.
Следует также понимать, что различные конструкции, описанные в настоящем документе, могут эффективно применяться в сочетании хирургическими системами с роботизированным управлением. Например, различные конструкции, описанные в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, описанными в заявке на патент США № 13/118,241, озаглавленной SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2012/0298719, которая полностью включена в настоящий документ путем ссылки. Например, на ФИГ. 3 показан хирургический инструмент 10ʺ, хорошо приспособленный для применения с роботизированной системой, такой как роботизированная система 13, показанная на ФИГ. 4. Хирургический инструмент 10ʺ включает концевой эффектор 200, функционально соединенный с узлом 100ʺ удлиненного ствола, который связан с корпусом 20ʺ в форме узла привода инструмента. На ФИГ. 4 показана тележка 15 роботизированной руки, выполненная с возможностью приведения в действие множества хирургических инструментов, таких как хирургического инструменты 10ʺ. Тележкой 15 роботизированной руки и хирургическими инструментами 10ʺ можно управлять с помощью главного контроллера 17, функционально соединенного (напрямую или беспроводным образом) с ними. Различные подробности касательно функционирования компонентов роботизированных систем и узлов привода различных инструментов можно найти в вышеупомянутой включенной опубликованной патентной заявке США № 2012/0298719, а также в патенте США № 6,132,368, озаглавленном MULTI-COMPONENT TELEPRESENCE SYSTEM AND METHOD, патенте США № 5,878,193, озаглавленном AUTOMATED ENDOSCOPE SYSTEM FOR OPTIMAL POSITIONING, патенте США № 5,792,135, озаглавленном ARTICULATED SURGICAL INSTRUMENT FOR PERFORMING MINIMALLY INVASIVE SURGERY WITH ENHANCED DEXTERITY AND SENSITIVITY, патенте США № 6,231,565, озаглавленном ROBOTIC ARM DLUS FOR PERFORMING SURGICAL TASKS, патенте США № 6,783,524, озаглавленном ROBOTIC SURGICAL TOOL WITH ULTRASOUND CAUTERIZING AND CUTTING INSTRUMENT, патенте США № 6,364,888, озаглавленном ALIGNMENT OF MASTER AND SLAVE IN A MINIMALLY INVASIVE SURGICAL APPARATUS, патенте США № 7,524,320, озаглавленном MECHANICAL ACTUATOR INTERFACE SYSTEM FOR ROBOTIC SURGICAL TOOLS, патенте США № 7,691,098, озаглавленном PLATFORM LINK WRIST MECHANISM, патенте США № 7,806,891, озаглавленном REPOSITIONING AND REORIENTATION OF MASTER/SLAVE RELATIONSHIP IN MINIMALLY INVASIVE TELESURGERY, а также в патенте США № 7,824,401, озаглавленном SURGICAL TOOL WITH WRITED MONOPOLAR ELECTROSURGICAL END EFFECTORS, полное описание каждого из которых включено в настоящий документ путем ссылки.
Таким образом, в настоящем документе термин «корпус» также может охватывать корпус или аналогичную часть роботизированной системы, которая вмещает или иным образом функционально поддерживает, по меньшей мере, одну приводную систему, выполненную с возможностью генерирования и применения, по меньшей мере, одного управляющего движения, которое может применяться для приведения в действие сменных узлов ствола, описанных в настоящем документе, и их соответствующих эквивалентов. Термин «рама» может относиться к части портативного хирургического инструмента, например «ручке». Термин «рама» также может представлять собой часть хирургического инструмента с роботизированным управлением и/или часть роботизированной системы, которая может применяться для функционального управления хирургическим инструментом.
Следует понимать, что пространственные термины, такие как «вертикальный», «горизонтальный», «правый», «левый» и т. п., используются в настоящем документе со ссылкой на фигуры, исходя из того, что продольная ось или «ось ствола» хирургического инструмента 10 (или других примеров хирургических инструментов, описанных в настоящем документе) совпадает с центральной осью ствола 100. Однако в действительной практике любой хирургический инструмент, описанный в данном документе, может быть ориентирован под разными углами, и как таковые эти пространственные термины применяются относительно самого хирургического инструмента. Кроме того, для портативного корпуса термин «проксимальный» применяется для обозначения угла зрения врача, который находится позади ручки и размещает концевой эффектор дистально, или от себя. В настоящем документе фраза «по существу поперечен продольной оси», где «продольная ось» представляет собой ось стержня, относится к направлению, которое почти перпендикулярно продольной оси. Однако следует понимать, что направления, которые несколько отклоняются от перпендикуляра относительно продольной оси, также являются по существу поперечными продольной оси.
Как показано на ФИГ. 1, концевой эффектор 200 соединен с возможностью поворота со стволом 100 посредством шарнирного сочленения 109. Множество шарнирных сочленений и систем управления описано в различных патентах и заявках на патент, которые включены в настоящий документ путем ссылки. Другие шарнирные сочленения и системы шарнирного соединения описаны в патенте США № 7,753,245, озаглавленном SURGICAL STAPLING INSTRUMENTS, и патенте США № 7,670,334, озаглавленном SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR, содержание которых полностью включено в настоящий документ путем ссылки. Различные другие средства шарнирного поворота концевого эффектора 200 более подробно описаны ниже.
Как показано на ФИГ. 5 и 6, концевой эффектор 200 включает, помимо прочего, удлиненный канал 210, который выполнен с возможностью функционального поддержания в нем кассеты 230 со скобами. Кассета 230 со скобами включает корпус 232 кассеты, в котором имеется расположенный по центру удлиненный паз 234 кассеты (ФИГ. 6). В представленной конструкции кассета 230 со скобами имеет три ряда 238 углублений 236 для скоб на каждой стороне удлиненного паза 234 кассеты. Одна или более хирургических скоб 242 поддерживаются на соответствующих выталкивателях 240 скоб, которые функционально поддерживаются в углублениях 236 для скоб. Лоток 215 кассеты присоединен к нижней части корпуса 232 кассеты. Лоток 215 кассеты включает паз 217 лотка, который совмещается с пазом 234 кассеты и пазом 212 канала в удлиненном канале 210. См. ФИГ. 6.
Хирургический инструмент 10 дополнительно включает пусковой элемент 300, который соединен с пусковой штангой 310, связанной с пусковой системой, которая поддерживается в корпусе 20, 20ʹ или 20ʺ. Пусковая система может приводиться в действие с помощью конструкции с двигателем, поддерживаемой в ручке 20 (ФИГ. 1), или она может приводиться в действие вручную путем приведения в действие пускового крючка 26ʹ (ФИГ. 2), или она может приводиться в действие с помощью роботизированной системы 13 (ФИГ. 4). Независимо от применяемой конструкции после приведения в действие пусковая система применяет к пусковой штанге 310 осевое пусковое движение, чтобы переместить пусковой элемент 300 в дистальном направлении DD. Как показано на ФИГ. 6, пусковой элемент 300 включает вертикально проходящий корпус 302 пускового элемента, на котором присутствует режущая ткань поверхность или лезвие 304. Первый язычок 306 пускового элемента выступает из первой боковой стороны 305 корпуса 302 пускового элемента, а второй язычок 308 пускового элемента выступает из второй боковой стороны 307 корпуса 302 пускового элемента. Кроме того, первый средний язычок (не показан) выступает из первой боковой стороны 305 корпуса 302 пускового элемента, а второй средний язычок 309 выступает из второй боковой стороны 307 корпуса 302 пускового элемента. Пусковой элемент 300 дополнительно включает язычок или лапку 312, которые выступают в боковом направлении из нижней части корпуса 302 пускового элемента. Назначение язычков 306, 308, 309 и лапки 312 будет более подробно описано ниже. Кроме того, внутри корпуса 232 кассеты могут быть установлены клиновидные салазки 320 для контакта с пусковым элементом 300 с приведением его в движение. При перемещении пускового элемента 300 дистально через корпус 232 кассеты скошенные поверхности 322 контактируют с выталкивателями 240 скоб, чтобы переместить выталкиватели 240 и поддерживаемые на них хирургические скобы 242 вверх в корпусе 232 кассеты.
Концевой эффектор 200 дополнительно включает в себя упор 250, который включает в себя корпус 252 упора, на котором присутствует нижняя поверхность 254, формирующая скобу. Упор 250 также включает монтажный участок 260 упора для соединения с возможностью поворота упора 250 с проксимальным концевым участком 211 удлиненного канала 210 для поворотного перемещения относительно него вокруг неподвижной оси A-A упора. Как, в частности, показано на ФИГ. 6 и 10, монтажный участок 260 упора в представленной конструкции содержит проксимально выступающее первое ответвление 262 упора, которое включает проходящую внутрь первую цапфу 264 упора. Представленный монтажный участок 260 упора дополнительно содержит проксимально проходящее второе ответвление 266 упора, которое расположено на расстоянии от первого ответвления 262 упора. Вторая цапфа 268 упора выступает внутрь от второго ответвления 266 упора. Первая цапфа 264 упора удерживается с возможностью вращения в гнезде 214 первой цапфы, предусмотренном в проксимальном концевом участке 211 удлиненного канала 210 (ФИГ. 8), а вторая цапфа 268 упора размещается с возможностью вращения в гнезде 216 второй цапфы (ФИГ. 3, 7, 8 и 9) в проксимальном концевом участке 211 удлиненного канала 210. Гнезда 214, 216 первой и второй цапфы служат для образования неподвижной оси A-A упора, которая перпендикулярна оси SA-SA ствола. Пи размещении с возможностью вращения первой цапфы 264 упора в гнезде 214 первой цапфы и размещении с возможностью вращения второй цапфы 268 упора в гнезде 216 второй цапфы упор 250 выполнен с возможностью перемещения относительно удлиненного канала 210 таким образом, что дистальный конец 253 упора 250 может избирательно перемещаться к удлиненному каналу 210 и от него.
Как показано на ФИГ. 3, 10 и 11, монтажный участок 260 упора включает закрывающий наклонный участок 270. Закрывающий наклонный участок 270 включает первый наклонный сегмент 272 и второй наклонный сегмент 274, который расположен на расстоянии от первого наклонного сегмента 272 с образованием ступенчатого отверстия 280 для пускового элемента между ними. См. ФИГ. 10, 12 и 13. Как показано на ФИГ. 12, верхний участок пускового элемента 300 может проходить в ступенчатое отверстие 280, когда упор 250 находится в открытом положении, а пусковой элемент 300 находится в исходном или неактивированном положении. Когда упор 250 закрыт, как показано на ФИГ. 13, верхняя часть пускового элемента 300 проходит через ступенчатое отверстие 280. Как показано на ФИГ. 10, в формирующей скобу нижней поверхности 254 упора 250 предусмотрен удлиненный паз 290 упора. Кроме того, на боковых сторонах паза 290 упора образованы первый закрывающий уступ 292 и второй закрывающий уступ 294. На закрывающем наклонном участке 270 предусмотрен уклон 273 первого закрывающего уступа, и он ведет к первому закрывающему уступу 292, а на закрывающем наклонном участке 270 предусмотрен уклон 275 второго закрывающего уступа, и он ведет ко второму закрывающему уступу 294.
Упор 250 перемещается в открытое положение (ФИГ. 12) с помощью пружины (не показана), которая смещает монтажный участок 260 упора вверх относительно проксимального конца 211 удлиненного канала 210 так, что нижняя поверхность 254 упора 250, формирующая скобу, расположена на расстоянии от кассеты 230 с хирургическими скобами. Дистальный конец 253 упора 250 перемещается к кассете 230 с хирургическими скобами в закрытое относительно нее положение путем приведения в действие закрывающей системы, которая продвигает закрывающий элемент 110 по оси дистально в контакт с закрывающим наклонным участком 270. Например, в представленном варианте осуществления закрывающий элемент 110 содержит узел 120 закрывающей трубки, выполненный с возможностью перемещения по оси в ответ на закрывающие движения, вызванные закрывающей системой, поддерживаемой в корпусе. Закрывающая система может приводиться в действие с помощью конструкции с двигателем, поддерживаемой в ручке 20, или она может приводиться в действие вручную путем приведения в действие закрывающего спускового механизма 28 (ФИГ. 1) или 28ʹ (ФИГ. 2), или она может приводиться в действие с помощью роботизированной системы 13 (ФИГ. 4). Независимо от применяемой конструкции приведение в действие закрывающей системы может обуславливать осевое закрывающее движение, прилагаемое к узлу 120 закрывающей трубки узла 100 ствола. На ФИГ. 12 показано положение узла 120 закрывающей трубки перед приведением в действие закрывающей системы. При перемещении узла 120 закрывающей трубки в дистальном направлении, DD, дистальный конец 122 узла 120 закрывающей трубки контактирует с закрывающим наклонным участком 270 монтажного участка 260 упора и поворачивает упор 250 таким образом, что его дистальный конец 253 перемещается к кассете 230 с хирургическими скобами. На ФИГ. 13 показано положение узла 120 закрывающей трубки в полностью закрытом положении. После перемещения упора 250 в полностью закрытое положение пусковую систему можно привести в действие с целью перемещения пускового элемента 300 по оси из неактивированного или исходного положения, показанного на ФИГ. 12 и 13, дистально через кассету 230 со скобами для разрезания ткани, зажатой между нижней поверхностью 254 упора 250, формирующей скобу, и кассетой 230 со скобами. При перемещении пускового элемента 300 дистально первый язычок 306 перемещается вверх по первому закрывающему уклону 273 на первом закрывающем уступе 292, а второй язычок 308 перемещается вверх по второму закрывающему уклону 275 на втором закрывающем уступе 294 в упоре 250. Средние язычки 309 скользят по верхней поверхности удлиненного канала 210, а лапка 312 проходит по нижней поверхности 223 удлиненного канала 210. Первый и второй язычки 306, 308 на первом и втором закрывающих уступах 292, 294, как и средние язычки 309 и лапка 312, служат для расположения нижней поверхности 254 упора 250, формирующей скобу, на желаемом расстоянии S от верхней поверхности или платформы кассеты с хирургическими скобами. См. ФИГ. 13.
Как показано на ФИГ. 5, в представленном примере концевой эффектор 200 выполнен с возможностью избирательного шарнирного поворота вокруг оси B-B шарнирного сочленения, которая перпендикулярна оси SA-SA ствола, образованной узлом 100 удлиненного ствола. В представленной конструкции узел 120 закрывающей трубки включает проксимальный сегмент 123 закрывающей трубки ствола, который проходит к корпусу 20, 20ʹ, 20ʺ и функционально взаимодействует с поддерживаемой в нем закрывающей системой. Проксимальный сегмент 123 закрывающей трубки связан с возможностью поворота с дистальным сегментом 130 закрывающей трубки. Например, как показано на ФИГ. 6, проксимальный сегмент 123 закрывающей трубки включает дистально выступающие верхний и нижний хвостовики 124, 126. Дистальный сегмент 130 закрывающей трубки включает проксимально выступающие верхний и нижний хвостовики 132, 134. Верхнее двухшарнирное звено 140 включает в себя выступающие вверх дистальный и проксимальный шарнирные штифты 142, 144, которые зацепляют, соответственно, верхнее дистальное штифтовое отверстие 133 в верхнем проксимально выступающем хвостовике 132 и верхнее проксимальное штифтовое отверстие 125 в верхнем дистально выступающем хвостовике 124. Нижнее двухшарнирное звено 150 включает выступающие вниз дистальный и проксимальный поворотные штифты 152, 154, которые зацепляют нижнее дистальное штифтовое отверстие (не показано) в проксимально выступающем хвостовике 134 и штифтовое отверстие 127 в дистально выступающем хвостовике 126 соответственно.
В представленной конструкции, как и в альтернативных конструкциях, узел 100 удлиненного ствола дополнительно включает узел рамы или узел стержня, или удерживающий узел, по существу имеющий обозначение 159. Например, в одной конструкции узел 159 рамы включает проксимальный участок 160 рамы и дистальный участок 170 рамы. Проксимальный участок 160 рамы выполнен с возможностью удержания в нем пусковой штанги 310 с возможностью перемещения и в зависимости от конструкции проходит назад к корпусу 20, 20ʹ, 20ʺ. Проксимальный конец (не показан) проксимального участка 160 рамы может быть функционально сопряжен с соответствующей системой управления, которая может облегчать вращение узла 159 рамы (и связанного с ним концевого эффектора 200) вокруг оси SA-SA ствола. Дополнительную информацию о конструкции и работе таких систем управления можно найти в различных ссылочных документах, которые включены в настоящий документ путем ссылки. Как показано на ФИГ. 6, дистальный участок 170 рамы включает поворотный штифт 172, размещенный с возможностью вращения в отверстии 220 для поворотного штифта, сформированном в проксимальном конце 211 удлиненного канала 210. Отверстие 220 для поворотного штифта формирует ось В-В шарнирного сочленения, вокруг которой может поворачиваться поворотный штифт 172. Другими словами, удлиненный канал 210 может поворачиваться вокруг поворотного штифта 172 и вокруг оси В-В шарнирного сочленения при применении к удлиненному каналу 210 поворотного движения. Как показано на ФИГ. 6, проксимальный конец 211 удлиненного канала 210 включает приводной штифт 222, который выполнен с возможностью функционального взаимодействия с приводным элементом шарнирного сочленения. Приводной штифт 222 выполнен с возможностью приема прилагаемого к нему усилия с помощью приводной системы 500 шарнирного сочленения и в зависимости от направления приложения усилия к приводному штифту 222 вынуждает концевой эффектор 200 шарнирно поворачиваться в первом направлении FD или во втором, противоположном, направлении SD.
Представленная приводная система 500 шарнирного сочленения может быть аналогична приводной системе шарнирного сочленения, описанной в публикации заявки на патент США №2014/0263541, содержание которой полностью включено в настоящий документ путем ссылки. Например, в одной форме приводная система 500 шарнирного сочленения включает проксимальный приводной элемент 510 шарнирного сочленения и дистальный приводной элемент 520 шарнирного сочленения. См. ФИГ. 6. Как описано в указанном выше ссылочном документе, проксимальный приводной элемент 510 шарнирного сочленения удерживается для избирательного осевого перемещения в дистальном и проксимальном направлениях в ответ на управляющие движения шарнирного сочленения, применяемые к нему системой управления шарнирным поворотом. Система управления шарнирным поворотом может, например, в зависимости от конструкции функционально поддерживаться в корпусе 20, 20ʹ, 20ʺ. Когда приводное усилие или управляющее движение шарнирного сочленения передается на проксимальный приводной элемент 510 шарнирного сочленения в проксимальном направлении или дистальном направлении, приводное усилие может передаваться на дистальный приводной элемент 520 шарнирного сочленения через фиксирующий элемент 550 шарнирного сочленения, как подробно описано в указанной выше справочной литературе, включенной в настоящий документ. Дополнительную информацию о работе дистального фиксирующего элемента 550 шарнирного сочленения получить из обзора ссылочных документов, для краткости эта информация не будет повторяться в настоящем документе.
Как подробно описано в указанном выше ссылочном документе, перемещение проксимального приводного элемента 510 шарнирного сочленения, проксимальное или дистальное, приводит к высвобождению фиксирующего элемента 550 шарнирного сочленения, который функционально удерживается в дистальном приводном элементе шарнирного сочленения и дистальном участке 170 рамы. Например, в конструкции, показанной на ФИГ. 6, дистальный приводной элемент 520 шарнирного сочленения включает дистально проходящий участок 522, который связан с возможностью поворота с промежуточным звеном 524 для соответствующего поворотного перемещения вокруг промежуточной оси IA-IA. См. ФИГ. 6. Хотя это отдельно не показано на ФИГ. 6, дистально выступающий участок 522 включает проходящий вниз проксимальный штифт, который размещается с возможностью поворота в проксимальном отверстии для поворотного штифта в промежуточном звене 524. Дистальный конец промежуточного звена 524 включает дистальное отверстие 526 для поворотного штифта, принимающее приводной штифт 222. При приведении в действие проксимального приводного элемента 510 шарнирного сочленения происходит шарнирный поворот удлиненного канала 210 посредством дистального приводного элемента шарнирного сочленения и фиксирующего элемента 550 шарнирного сочленения. Например, исходное проксимальное перемещение проксимального приводного элемента 510 шарнирного сочленения может разблокировать проксимальное перемещение дистального приводного элемента 520 шарнирного сочленения и фиксирующего элемента 550 шарнирного сочленения, в то время как дополнительное проксимальное перемещение проксимального приводного элемента 510 шарнирного сочленения может привести в действие дистальный приводной элемент 520 шарнирного сочленения и фиксирующий элемент 550 шарнирного сочленения проксимально. Аналогичным образом, исходное дистальное перемещение проксимального шкива шарнира 510 может разблокировать дистальное перемещение дистального шкива шарнира 520 и блокировки шарнира 550, в то время как дополнительное дистальное перемещение проксимального шкива шарнира 510 может привести в действие дистальный шкив шарнира 520 и блокировку шарнира 550 дистально.
Например, как показано на ФИГ. 6, пусковая штанга 310 может содержать многослойную конструкцию. Такая конструкция позволяет пусковой штанге 310 в достаточной мере сгибаться при шарнирном повороте концевого эффектора 200 вокруг оси B-B шарнирного сочленения. Пусковая штанга 310 поддерживается с возможностью скольжения внутри паза 162 пускового стержня в проксимальном участке 160 рамы. Дистальный концевой участок 164 проксимального участка 160 рамы образован двумя противоположными сферическими поверхностями 166, 168 для обеспечения дополнительно боковой поддержки пусковой штанги 310 при шарнирном повороте.
При работе с концевыми эффекторами, в которых применяются пусковые штанги или пусковые элементы и которые выполнены с возможностью шарнирного поворота в диапазоне, например, сорока пяти градусов, возникает ряд трудностей. Для облегчения функционального шарнирного поворота таких концевых эффекторов пусковой элемент или пусковая штанга должны быть достаточно гибкими, чтобы обеспечивать такой диапазон шарнирного поворота. Однако пусковая штанга или пусковой элемент также не должны деформироваться под действием сжимающих пусковых нагрузок. Для обеспечения дополнительной поддержки пусковой штанги или пускового элемента разработаны различные конструкции опорных или предохранительных пластин. Некоторые из таких конструкций описаны в патенте США № 6,964,363, озаглавленном SURGICAL STAPLING INSTRUMENT HAVING ARTICULATION JOINT SUPPORT PLATES FOR SUPPORTING A FIRING BAR, и патенте США № 7,213,736, озаглавленном SURGICAL STAPLING INSTRUMENT INCORPORATING AN ELECTROACTIVE POLYMER ACTUATED FIRING BAR TRACK THROUGH AN ARTICULATION JOINT, описание которых полностью включено в настоящий документ путем ссылки. Предохранительные пластины, обеспечивающие по существу сопротивление деформации, в целом тяжело гнуться, что способствует увеличению сил, которые необходимо преодолевать системе шарнирного сочленения.
На ФИГ. 14 и 15 показан опорный узел 600 пусковой штанги в форме узла 601 направляющей пусковой штанги, который применяется в представленном хирургическом инструменте 10. Как показано на этих фигурах, а также на ФИГ. 6, узел 601 направляющей пусковой штанги включает проксимальный конец 602 и дистальный конец 604, которые взаимно соединены с помощью опорных элементов 606, 608 пусковой штанги, которые разделены пазом 610 пусковой штанги, который проходит через проксимальный и дистальный концы 602, 604. Как показано на виде в горизонтальной проекции, узел 601 направляющей пусковой штанги напоминает конструкцию двутаврового элемента с пазом, проходящим через центральную стенку штанги. Как, например, показано на ФИГ. 15, опорный элемент 606 пусковой штанги имеет пластинчатую форму или содержит пластину, которая включает проходящий внутрь верхний край 607, а опорный элемент 608 пусковой штанги имеет пластинчатую форму или содержит пластину, которая включает проходящий внутрь верхний край 609. Верхние края 607, 609 придают некоторую прочность опорным элементам 606, 608 пусковой штанги при изгибе и могут служить для предотвращения схода пусковой штанги 310 с верхней части узла 601 направляющей пусковой штанги при сгибании пусковой штанги 310. Узел 601 направляющей пусковой штанги может быть изготовлен, например, из стеклонаполненного материала ISOPLAST®, нейлона, стеклонаполненного материала VECTRA® и т. п., и он может быть выполнен за одно целое. В других конструкциях опорные элементы 606, 608 пусковой штанги могут содержать компоненты, отличающиеся от проксимального и дистального концов и соединенные с ними посредством соответствующих крепежных методов, таких как сварка, добавочное формование и т. п.
Как показано на ФИГ. 6, проксимальный конец 602 узла 601 направляющей пусковой штанги размещается в проксимальной полости 169 для штанги, образованной в дистальном концевом участке 164 проксимального участка 160 рамы. Дистальный конец 604 узла 601 направляющей пусковой штанги размещается в дистальной полости 224 для стержня, образованной в выступающем вверх опорном ушке 1700, образованном в проксимальном конце 211 удлиненного канала 210. Для облегчения осевого перемещения узла 601 направляющей пусковой штанги при шарнирном повороте концевого эффектора 200 проксимальная полость 169 для штанги имеет размеры относительно проксимального концевого участка 602 опорного узла 600 пусковой штанги, допускающие осевое перемещение в ней проксимального концевого участка 602. Аналогично дистальная полость 224 для штанги может иметь размеры относительно дистального концевого участка 604 узла 601 направляющей пусковой штанги для облегчения осевого перемещения узла 601 направляющей пусковой штанги относительно удлиненного канала 210 при его шарнирном повороте. На ФИГ. 17 показан концевой эффектор 200 в шарнирно неповернутом положении, в котором концевой эффектор 200 по существу находится на одной оси с узлом 100 ствола. Такое положение концевого эффектора позволяет ввести концевой эффектор 200 и часть узла 100 удлиненного ствола в тело пациента, например, через троакар. На ФИГ. 18 и 19 показан концевой эффектор 200, шарнирно повернутый в первом направлении FD, а на ФИГ. 20 и 21 показан концевой эффектор 200, шарнирно повернутый в противоположном, втором, направлении SD.
Концевые эффекторы, которые описаны в настоящем документе, а также концевые эффекторы, описанные в ранее включенной опубликованной патентной заявке № 2014/0263541, часто применяются при проведении нижней передней резекции толстой кишки («НПР»). НПР - обычная хирургическая операция при лечении рака прямой кишки, выполняемая при необходимости для удаления пораженного или разорванного участка кишечника в случаях дивертикулита. Доступ к целевому (-ым) участку (-ам) толстой кишки с помощью данных концевых эффекторов при выполнении НПР может зависеть от следующих факторов: (i) угла шарнирного поворота ствола, (ii) расстояния от штифта или оси шарнирного сочленения до самых проксимальных скоба (иногда называется «проксимальной мертвой зоной»), (iii) расстояния от самых дистальных скоб до дистального конца концевого эффектора (иногда называется «дистальной мертвой зоной»), и (iv) диаметра ствола. На ФИГ. 22 приводится сравнение диапазона движения концевого эффектора 200 в тазовой области, как описано в настоящем документе, с диапазоном движения концевого эффектора 200ʹ такого типа, который включает упор, связанный с возможностью поворота с возможностью поворота с удлиненным каналом c помощью конструкции овально-изогнутого паза, как описано в упомянутой выше и включенной в настоящий документ публикации заявки на патент США № 2014/0263541. Например, в одной конструкции концевого эффектора 200ʹ проксимальная мертвая зона PDZʺ имеет длину около 3,91 сантиметра (1,54 дюйма). В противоположность этому проксимальную мертвую зону PDZ, образующуюся в связи с, по меньшей мере, одним применением концевого эффектора 200, как описано в настоящем документе, можно сократить, например, на 0,813 сантиметра (0,320 дюйма). См. ФИГ. 23. Таким образом, PDZ < PDZʹ. Например, как также показано на этой фигуре, по меньшей мере, в одном варианте осуществления расстояние от дистального конца 201 концевого эффектора до оси A-A шарнирного сочленения или точки поворота меньше расстояния от дистального конца 201ʹ концевого эффектора 200ʹ до оси B-B шарнирного сочленения или точки поворота, например, на величину около 2,3 сантиметра (0,9 дюйма) (длина L на ФИГ. 23). Таким образом, управление концевым эффектором 200 представляет значительное усовершенствование в управлении конструкций концевых эффекторов предшествующего уровня техники. Кроме того, концевой эффектор 200 демонстрирует существенное увеличение механических преимуществ (например, такое как увеличение до 300% в некоторых случаях) перемещения оси поворота или шарнирного сочленения проксимальнее и перемещение закрывающего элемента или точки опоры дистальнее. Например, благодаря такому усовершенствованию доступа с помощью 60-миллиметрового эндокатера можно выполнять доступ к толстой кишке под углом почти 90 градусов и выполнять существенно более качественное поперечное рассечение, что позволяет свести к минимуму воздействие последующего срабатывания кругового сшивающего инструмента и, таким образом, снизить вероятность подтеканий. За счет уменьшения расстояния от шарнирного сочленения до первой или самой проксимальной скобы обеспечивается большая степень свободы вращения эндокатера относительно тазового пояса с увеличением эффективного угла доступа относительно толстой кишки для «глубокой» НПР. Дополнительное перемещение от кулачково-канальной к кулачково-трубчатой архитектуре увеличивает механические преимущества системы и таким образом снижает нагрузки, передаваемые назад на ручку или корпус, и повышает прочность инструмента.
На ФИГ. 24-31 показан другой хирургический инструмент 1010, который включает концевой эффектор 1200, который функционально связан с узлом 1100 удлиненного ствола. Узел 1100 удлиненного ствола может функционально соединяться с любым из корпусов 20, 20ʹ, 20ʺ, как описано выше. Концевой эффектор 1200 соединен с возможностью поворота с узлом 1100 удлиненного ствола посредством шарнирного сочленения 1109. Концевой эффектор 1200 включает, помимо прочего, удлиненный канал 1210, который выполнен с возможностью функционального поддержания в нем кассеты 1230 со скобами. См. ФИГ. 25. Кассета 1230 со скобами включает корпус 1232 кассеты, в котором присутствует расположенный по центру удлиненный паз 1234 кассеты. В представленной конструкции кассета 1230 со скобами имеет три ряда 1238 углублений 1236 для скоб на каждой стороне удлиненного паза 1234. Одна или более скоб 1242 поддерживаются на соответствующих выталкивателях 1240 скоб, которые функционально поддерживаются в углублениях 1236 для скоб. Лоток 1215 кассеты присоединен к нижней части корпуса 1232 кассеты. Лоток 1215 кассеты включает паз 1217 лотка, который совмещается с пазом 1234 кассеты и пазом 1212 канала в удлиненном канале 1210.
Хирургический инструмент 1010 дополнительно включает пусковой элемент 1300, который соединен с пусковой штангой 1310, которая связана с пусковой системой, поддерживаемой в корпусе 20, 20ʹ или 20ʺ. Пусковая система может приводиться в действие с помощью конструкции с двигателем, поддерживаемой в ручке 20 (ФИГ. 1), или она может приводиться в действие вручную путем приведения в действие пускового крючка 26ʹ (ФИГ. 2), или она может приводиться в действие с помощью роботизированной системы 13 (ФИГ. 4). Независимо от применяемой конструкции после приведения в действие пусковая система применяет к пусковой штанге 1310 осевое пусковое движение, чтобы переместить пусковой элемент 1300 в дистальном направлении DD. Как показано на ФИГ. 25, пусковой элемент 1300 включает вертикально проходящий корпус 1302 пускового элемента, на котором присутствует режущая ткань поверхность или лезвие 1304. Первый язычок 1306 пускового элемента выступает из первой боковой стороны 1305 корпуса 1302 пускового элемента, а второй язычок 1308 пускового элемента выступает из второй боковой стороны 1307 корпуса 1302 пускового элемента. Кроме того, первый средний язычок (не показан) выступает из первой боковой стороны 1305 корпуса 1302 пускового элемента, а второй средний язычок 1309 выступает из второй боковой стороны 1307 корпуса 1302 пускового элемента. Пусковой элемент 1300 дополнительно включает язычок или лапку 1312, которые выступают в боковом направлении из нижней части корпуса 1302 пускового элемента. Назначение язычков 1306, 1308, 1309 и лапки 1312 будет более подробно описано ниже. Кроме того, внутри корпуса 1232 кассеты могут быть установлены клиновидные салазки 1320 для контакта с пусковым элементом 1300 с приведением его в движение. Как известно, при перемещении пускового элемента 1300 дистально через корпус 1232 кассеты скошенные поверхности 1322 контактируют с выталкивателями 1240 скоб, чтобы переместить выталкиватели 1240 и поддерживаемые на них хирургические скобы 1242 вверх в корпусе 1232 кассеты.
Концевой эффектор 1200 дополнительно включает в себя упор 1250, который включает в себя корпус 1252 упора, на котором присутствует нижняя поверхность 1254, формирующая скобу. Упор 1250 также включает монтажный участок 1260 упора для соединения упора 1250 с возможностью поворота с проксимальным концевым участком 1211 удлиненного канала 1210 для поворотного перемещения относительно него. Монтажный участок 1260 упора включает две (на ФИГ. 25-28 показан только одна) проходящие в боковом направлении цапфы 1264 упора. Цапфы 1264 упора размещаются с возможностью перемещения в соответствующих овально-изогнутых пазах 1214, предусмотренных в проксимальном концевом участке 1211 удлиненного канала 1210. Такая конструкция позволяет упору 1250 поворачиваться относительно удлиненного канала 1210 при применении закрывающего или открывающего движений к монтажному участку 1260 упора. Монтажный участок 1260 упора включает выступающий вверх язычок 1263 упора, который функционально взаимодействует с подковообразным отверстием 1131, предусмотренным в закрывающем элементе 1110.
В представленном примере закрывающий элемент 1110 содержит узел 1120 закрывающей трубки, включая дистальный сегмент 1130 закрывающей трубки, в котором предусмотрено отверстие 1131. Узел 1120 закрывающей трубки включает в себя проксимальный сегмент 1122 закрывающей трубки ствола, который проходит к корпусу 20, 20ʹ, 20ʺ и функционально взаимодействует с поддерживаемой в нем закрывающей системой. Проксимальный сегмент 1123 закрывающей трубки связан с возможностью поворота с дистальным сегментом 1130 закрывающей трубки. Например, как показано на ФИГ. 25, проксимальный сегмент 1123 закрывающей трубки включает дистально выступающие верхний и нижний хвостовики 1124, 1126. Дистальный сегмент 1130 закрывающей трубки включает проксимально выступающие верхний и нижний хвостовики 1132, 1134. Верхнее двухшарнирное звено 1140 включает в себя выступающие вверх дистальный и проксимальный шарнирные штифты 1142, 1144, которые зацепляют, соответственно, верхнее дистальное штифтовое отверстие 1133 в верхнем проксимально выступающем хвостовике 1132 и верхнее проксимальное штифтовое отверстие 1125 в верхнем дистально выступающем хвостовике 1124. Нижнее двухшарнирное звено 1150 включает выступающие вниз дистальный и проксимальный поворотные штифты 1152, 1154, которые зацепляют нижнее дистальное штифтовое отверстие (не показано) в проксимально выступающем хвостовике 1134 и штифтовое отверстие 1127 в дистально выступающем хвостовике 1126 соответственно. При перемещении дистальной закрывающей трубки 1130 в дистальном направлении DD упор 1250 поворачивается в закрытое положение относительно кассеты 1230 с хирургическими скобами за счет взаимодействия между отверстием 1131 в дистальной закрывающей трубки 1130 и язычком 1263 упора, а при перемещении дистальной закрывающей трубки 1130 в проксимальном направлении PD упор 1250 поворачивается в открытое положение благодаря центральному язычку 1137 в дистальном сегменте 1130 закрывающей трубки. Перемещение дистального сегмента 1130 закрывающей трубки управляется закрывающей системой, приводимой в действие с помощью конструкции с двигателем, поддерживаемой в ручке 20, или приводимой в действие вручную путем приведения в действие закрывающего спускового механизма 28ʹ (ФИГ. 2), или приводимой в действие с помощью роботизированной системы 13 (ФИГ. 4).
Упор 1250 может дополнительно иметь паз упора и закрывающие уступы, как описано выше применительно к упору 250, для взаимодействия с язычками 1306, 1308, как также подробно описано выше. После перемещения упора 1250 в полностью закрытое положение пусковую систему можно привести в действие с целью перемещения пускового элемента 1300 по оси из неактивированного или исходного положения дистально через кассету 1230 со скобами для разрезания ткани, зажатой между нижней поверхностью 1254 упора 1250, формирующей скобу, и кассетой 1230 со скобами. При перемещении пускового элемента 1300 дистально первый язычок 1306 взаимодействует с возможностью перемещения с первым закрывающим уступом, а второй язычок 1308 взаимодействует с возможностью перемещения со вторым закрывающим уступом в упоре 1250. Средние язычки 1309 скользят по верхней поверхности удлиненного канала 1210, а лапка 1312 проходит по нижней поверхности 1223 удлиненного канала 1210. Первый и второй язычки 1306, 1308 на первом и втором закрывающих уступах, как и средние язычки 1309 и лапка 1312, служат для расположения нижней поверхности 1254 упора 2150, формирующей скобу, на желаемом расстоянии от верхней поверхности или платформы кассеты 1230 с хирургическими скобами.
Как показано на ФИГ. 24-26, в представленном примере концевой эффектор 1200 выполнен с возможностью шарнирного поворота вокруг оси B-B шарнирного сочленения, которая перпендикулярна оси SA-SA ствола, образованной узлом 1100 удлиненного ствола. В представленной конструкции узел 1100 удлиненного ствола дополнительно включает узел рамы или узел стержня, или удерживающий узел, по существу имеющий обозначение 1159. Например, в одной конструкции узел 1159 рамы включает проксимальный участок 1160 рамы и дистальный участок 1170 рамы. Проксимальный участок 1160 рамы выполнен с возможностью удержания в нем пусковой штанги 1310 с возможностью перемещения и в зависимости от конструкции проходит назад к корпусу 20, 20ʹ, 20ʺ. Проксимальный конец (не показан) проксимального участка 1160 рамы может быть функционально сопряжен с соответствующей системой управления, которая может облегчать вращение узла 1159 рамы (и связанного с ним концевого эффектора 1200) вокруг оси SA-SA ствола. Дополнительную информацию о конструкции и работе таких систем управления можно найти в различных ссылочных документах, которые включены в настоящий документ путем ссылки.
Как показано на ФИГ. 25, дистальный участок 1170 рамы включает поворотный штифт 1172, размещенный с возможностью вращения в отверстии 1220 для поворотного штифта, сформированном в проксимальном конце 1211 удлиненного канала 1210. Отверстие 1120 для поворотного штифта формирует ось В-В шарнирного сочленения, вокруг которой может поворачиваться поворотный штифт 1172. Другими словами, удлиненный канал 1210 может поворачиваться вокруг поворотного штифта 1172 и вокруг оси В-В шарнирного сочленения при применении к удлиненному каналу 1210 поворотного движения. Как показано на ФИГ. 25, проксимальный конец 1211 удлиненного канала 1210 включает приводной штифт 1222, который выполнен с возможностью функционального взаимодействия с приводным элементом шарнирного сочленения. Приводной штифт 1222 выполнен с возможностью приема прилагаемого к нему усилия с помощью приводной системы 1500 шарнирного сочленения и в зависимости от направления приложения усилия к приводному штифту 1222 вынуждает концевой эффектор 1200 шарнирно поворачиваться в первом направлении или во втором, противоположном, направлении вокруг оси B-B шарнирного сочленения.
Представленная приводная система 1500 шарнирного сочленения может быть аналогична приводной системе шарнирного сочленения, описанной в публикации заявки на патент США №2014/0263541, содержание которой полностью включено в настоящий документ путем ссылки. Например, в одной форме приводная система 1500 шарнирного сочленения включает проксимальный приводной элемент 1510 шарнирного сочленения и дистальный приводной элемент 1520 шарнирного сочленения. Как описано в указанном выше ссылочном документе, проксимальный приводной элемент 1510 шарнирного сочленения удерживается для избирательного осевого перемещения в дистальном и проксимальном направлениях в ответ на управляющие движения шарнирного сочленения, применяемые к нему системой управления шарнирным поворотом. Система управления шарнирным поворотом может, например, в зависимости от конструкции функционально поддерживаться в корпусе 20, 20ʹ, 20ʺ. Когда приводное усилие или управляющее движение шарнирного сочленения передается на проксимальный приводной элемент 1510 шарнирного сочленения в проксимальном направлении или дистальном направлении, приводное усилие может передаваться на дистальный приводной элемент 1520 шарнирного сочленения через фиксирующий элемент 1550 шарнирного сочленения, как подробно описано в указанной выше справочной литературе, включенной в настоящий документ. Дополнительную информацию о работе дистального фиксирующего элемента 1550 шарнирного сочленения получить из обзора ссылочных документов, для краткости эта информация не будет повторяться в настоящем документе.
Как подробно описано в указанном выше ссылочном документе, перемещение проксимального приводного элемента 1510 шарнирного сочленения, проксимальное или дистальное, приводит к высвобождению фиксирующего элемента 1550 шарнирного сочленения, который функционально удерживается в дистальном приводном элементе шарнирного сочленения и дистальном участке 1170 рамы. Например, в конструкции, показанной на ФИГ. 25, промежуточное звено 1524 связано с возможностью поворота с дистальным приводным элементом 1520 шарнирного сочленения для соответствующего поворотного перемещения вокруг промежуточной оси IA-IA. Как показано на ФИГ. 25, поворотный штифт 1523 образован в дистальном приводном элементе 1520 шарнирного сочленения и проходит в проксимальное отверстие 1525 для поворотного штифта в промежуточном звене 1524. Дистальный конец промежуточного звена 1524 включает дистальное отверстие 1526 для поворотного штифта, принимающее приводной штифт 1222. При приведении в действие проксимального приводного элемента 1510 шарнирного сочленения происходит шарнирный поворот удлиненного канала 1210 посредством дистального приводного элемента шарнирного сочленения и фиксирующего элемента 1550 шарнирного сочленения. Например, исходное проксимальное перемещение проксимального приводного элемента 1510 шарнирного сочленения может разблокировать проксимальное перемещение дистального приводного элемента 1520 шарнирного сочленения и фиксирующего элемента 1550 шарнирного сочленения, в то время как дополнительное проксимальное перемещение проксимального приводного элемента 1510 шарнирного сочленения может привести в действие дистальный приводной элемент 1520 шарнирного сочленения и фиксирующий элемент 1550 шарнирного сочленения проксимально. Аналогичным образом, исходное дистальное перемещение проксимального шкива шарнира 1510 может разблокировать дистальное перемещение дистального шкива шарнира 1520 и блокировки шарнира 1550, в то время как дополнительное дистальное перемещение проксимального шкива шарнира 1510 может привести в действие дистальный шкив шарнира 1520 и блокировку шарнира 1550 дистально.
В конструкциях, в которых применяются традиционные предохранительные пластины для поддержки пусковой штанги при деформации, в зависимости от траектории кривизны (в зависимости от направления шарнирного поворота) может эффективно работать только одна из предохранительных пластин. Таким образом, по меньшей мере, в некоторых конструкциях может быть предпочтительно связывать или соединять вместе внутренние и внешние части предохранительных пластин (или «опорных элементов пусковой штанги»), чтобы позволить им функционировать в паре, а не независимо друг от друга. Такая конструкция может, например, обеспечивать более чем двойной момент инерции только внешней пластины, при этом сводится к минимуму общая сила, необходимая для сгибания. В некоторых конструкциях, как будет более подробно описано ниже, предохранительные пластины (или опорные элементы пусковой штанги) выполнены таким образом, чтобы они могли перемещаться продольно относительно друг друга. Поскольку ни один из элементов не расположен на центральной линии сгиба, например, один из элементов имеет более длинную траекторию, а другой элемент имеет более короткую траекторию.
В представленном примере хирургический инструмент 1010 дополнительно включает первый опорный элемент 1610 пусковой штанги и второй опорный элемент 1620 пусковой штанги. Каждый из первого и второго опорных элементов 1610, 1620 пусковой штанги может содержать пластину, например, изготовленную из нержавеющей стали, пружинной стали, титана, NITINOL™ и т. п. Как показано на ФИГ. 25, первый опорный элемент 1610 пусковой штанги включает проксимальный проходящий вниз монтажный язычок 1612 и дистальный проходящий вниз монтажный язычок 1614. Второй опорный элемент 1620 пусковой штанги включает аналогичные проксимальный и дистальный проходящие вниз язычки (не показаны на ФИГ. 25). Как показано на ФИГ. 26, пусковая штанга 1310 выполнена с возможностью скольжения и проходит между первым и вторым опорными элементами 1610, 1620 пусковой штанги. Дистальные концы первого и второго опорных элементов 1610, 1620 пусковой штанги выполнены с возможностью скольжения и размещаются внутри паза 1702, образованного в выступающем вверх опорном ушке 1700, образованном в проксимальном конце 1211 удлиненного канала 1210. На ФИГ. 27 и 30 показан шарнирный поворот концевого эффектора 1200 в первом направлении FD. Как показано на этих фигурах, первый опорный элемент 1610 пусковой штанги перемещается немного дистально относительно второго опорного элемента 1620 пусковой штанги для обеспечения поддержки пусковой штанги 1310 при сгибе при шарнирном повороте. Монтажные язычки могут служить для ограничения степени осевого перемещения опорных элементов пусковой штанги. На ФИГ. 28 и 31 показан шарнирный поворот концевого эффектора 1200 во втором направлении SD. Как показано на этих фигурах, второй опорный элемент 1620 пусковой штанги перемещается немного дистально относительно первого опорного элемента 1610 пусковой штанги для обеспечения сгибания или поддержки при деформации пусковой штанги 1310 при шарнирном повороте. Как показано на ФИГ. 30 и 31, такая конструкция обеспечивает шарнирный поворот концевого эффектора 1200 в пределах диапазонов около семидесяти пяти градусов (75 °) в обе стороны от оси SA-SA ствола. В, по меньшей мере, одной конструкции паз 1702 имеет размеры, обеспечивающие зазор между опорными элементами 1610, 1610 пусковой штанги и пусковой штангой 1310, например, около 0,13-0,038 см (0,05-0,015 дюйма) для облегчения скользящего перемещения опорных элементов 1610, 1620 пусковой штанги внутри паза 1702 и скользящего перемещения пусковой штанги 1310 при срабатывании инструмента (т. е. осевого выдвижения пусковой штанги 1310 в дистальном направлении). Например, в одной конструкции паз 1702 может иметь ширину (W) 0,13-0,165 см (0,05-0,065 дюйма), каждый из опорных элементов 1610, 1620 пусковой штанги может иметь толщину (FBT) около 0,020-0,038 см (0,008-0,015 дюйма), и пусковая штанга 1310 может иметь толщину (BT) около 0,114 см (0,045 дюйма). См. ФИГ. 32. Как показано на ФИГ. 33, проксимальный конец 1704 паза 1702 расширяется наружу для облегчения сгибания или изгибания опорных элементов 1610, 1620 пусковой штанги при шарнирном повороте концевого эффектора 1200. Проксимальный конец 1704 паза 1702 имеет ширину PW проксимального паза, например, около 0,18-0,20 см (0,07-0,08 дюйма). Для ширины паза также могут быть характерны другие значения. Таким образом, в представленном примере PT > PW. Следует понимать, что опорные элементы 1610 и 1620 пусковой штанги помогают поддерживать пусковую штангу 1310 при шарнирном повороте концевого эффектора и препятствуют деформации пусковой штанги 1310 под действием сжимающих пусковых нагрузок.
На ФИГ. 34 показана часть другого удлиненного канала 1210ʹ, который включает выступающее вверх опорное ушко 1700ʹ, в котором образован паз 1702ʹ для приема опорных элементов 1610, 1620 пусковой штанги (не показаны на ФИГ. 34) с возможностью скользящего перемещения, как описано выше. Однако в данной конструкции в опорном ушке 1700ʹ образована пара противоположных выступов или фиксаторов 1706ʹ таким образом, что, как показано на фигуре, ширина проксимального конца паза 1702 (PWʹ) меньше ширины паза 1702 (Wʹ). Дистальный выход 1620 из 1160 предпочтительно уже удерживающего паза, который удерживает участок L штанги. Это «сужение» необходимо для того, чтобы опорные пластины вели себя как консольные балки, а не плавающие шарнирные сочленения, и это может привести к существенному улучшению опоры пусковой штанги, которая обеспечивается пластиной для пусковой штанги. Например, при сравнении консольной конструкции с шарнирной конструкцией (свободной посадкой) предполагается, что консольная конструкция способна обеспечить большее сопротивление в 4-16, что обеспечивает существенно меньшее отклонение опорной пластины уже в самом начале.
Как показано на ФИГ. 35-37, хирургический инструмент 1010ʹ, показанный в настоящем документе, по существу идентичен хирургическому инструменту 1010, подробно описанному выше, и в нем применяются опорные элементы 1610ʹ и 1620ʹ пусковой штанги для обеспечения поддержки пусковой штанги 1310 против деформации при шарнирном повороте концевого эффектора 1200. На ФИГ. 35 и 36 показаны положения опорных элементов 1610ʹ, 1620ʹ пусковой штанги, когда концевой эффектор находится в шарнирно неповернутом положении. На ФИГ. 37 показан концевой эффектор 1200 в шарнирно повернутом положении. Как показано на этой фигуре, при шарнирном повороте опорные элементы 1610ʹ, 1620ʹ пусковой штанги перемещаются продольно относительно друг друга. Например, более конкретно, на этой фигуре показан опорный элемент 1610ʹ пусковой штанги на короткой стороне изгиба.
На ФИГ. 38-40 показан другой хирургический инструмент 2010, который может быть, например, идентичен хирургическому инструменту 1010, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, в хирургическом инструменте 2010 применяется опорный узел пусковой штанги, по существу имеющий обозначение 2600, который содержит первый опорный элемент 2610 пусковой штанги и второй опорный элемент 2620 пусковой штанги. Каждый из опорных элементов 2610, 2620 пусковой штанги содержит конструкцию с компрессионной лентой, которая при шарнирном повороте поддерживает пусковую штангу 1310 в боковом направлении, при этом облегчая осевое перемещение пусковой штанги 1310 между ними и ее ходы втягивания. Более конкретно, в одной конструкции первый опорный элемент 2610 пусковой штанги содержит первую компрессионную ленту 2612, которая может содержать, например, лентовидный элемент, изготовленный из пружинной стали или подобного материала. Как показано на ФИГ. 38-40, первая компрессионная лента 2612 включает первый проксимальный монтажный элемент 2614 в форме первого проксимального монтажного язычка 2615, который выполнен с возможностью размещения внутри монтажного паза 1162 в проксимальном участке 1160 рамы. Кроме того, первая проксимальная компрессионная лента 2612 дополнительно включает первый дистальный монтажный элемент 2616 в форме первого дистального монтажного язычка 2617, который выполнен с возможностью размещения внутри первого дистального монтажного паза 1710 в выступающем вверх опорном ушке 1700, образованном в проксимальном конце 1211 удлиненного канала 1210. Как, в частности, показано на ФИГ. 39, первый дистальный монтажный паз 1710 имеет ширину FSW первого паза, которая больше толщины первого дистального монтажного язычка 2617, для облегчения осевого перемещения первого дистального монтажного язычка 2617 внутри первого дистального монтажного паза 1710. Кроме того, первая компрессионная лента 2612 включает первый пружинный участок или складку 2618, которые размещаются с возможностью опоры в первой удлиненной полости 1166 в проксимальном участке 1160 рамы.
Как дополнительно показано на ФИГ. 39, второй опорный элемент 2620 пусковой штанги содержит вторую компрессионную ленту 2622, которая может содержать, например, лентовидный элемент, изготовленный из пружинной стали или подобного материала. Вторая компрессионная лента 2622 включает второй проксимальный монтажный элемент 2624 в форме второго проксимального монтажного язычка 2625, который выполнен с возможностью размещения внутри монтажного паза 1164 в проксимальном участке 1160 рамы. Кроме того, вторая проксимальная компрессионная лента 2622 дополнительно включает второй дистальный монтажный элемент 2626 в форме второго дистального монтажного язычка 2627, который выполнен с возможностью размещения внутри второго дистального монтажного паза 1712 в выступающем вверх опорном ушке 1700, образованном в проксимальном конце 1211 удлиненного канала 1210. Как, в частности, показано на ФИГ. 39, второй дистальный монтажный паз 1712 имеет ширину SSW второго паза, которая больше толщины второго дистального монтажного язычка 2627, для облегчения осевого перемещения второго дистального монтажного язычка 2627 внутри второго дистального монтажного паза 1712. Кроме того, вторая компрессионная лента 2622 включает второй пружинный участок или складку 2628, которые размещаются с возможностью опоры во второй удлиненной полости 1168 в проксимальном участке 1160 рамы. Как также показано на ФИГ. 38-40, в представленном варианте осуществления дистальный конец 1161 проксимального участка 1160 рамы имеет противоположные сферические поверхности 1163, 1165, которые выполнены с возможностью боковой поддержки опорных элементов 2610, 2620 пусковой штанги при шарнирном повороте концевого эффектора 1200.
На ФИГ. 39 показаны положения первой и второй компрессионных лент 2610, 2620, когда концевой эффектор 1200 находится в шарнирно неповернутом положении. В этом положении первая и вторая компрессионные ленты 2610, 2620 воздействуют на противоположные боковые стороны гибкой пусковой штанги 1310 с противоположными сжимающими силами CF, при этом позволяя пусковой штанге 1310 перемещаться по оси во время пускового хода и хода втягивания. В шарнирно неповернутом положении каждая из первой и второй компрессионных лент 2610, 2620 имеет первую несочлененную длину CL1, CL2 соответственно. На ФИГ. 40 показаны положения первой и второй компрессионных лент 2610, 2620, когда концевой эффектор 1200 шарнирно повернут в одном направлении шарнирного поворота. Как показано на этой фигуре, первая компрессионная лента 2610 растянута (CL3 > CL1), а вторая компрессионная лента 2620 сжата (CL4 < CL2). Пружинные участки 2618 и 2628 облегчают удлинение и сжатие компрессионных лент 6210, 2620 при шарнирном повороте, при этом также сохраняют боковые сжимающие силы, действующие на пусковую штангу 1310, таким образом препятствуя деформации пусковой штанги 1310 при перемещении между ними по оси.
На ФИГ. 41-45 показан другой хирургический инструмент 2010, который может быть, например, идентичен хирургическому инструменту 1010, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, в хирургическом инструменте 2010 применяется опорный узел пусковой штанги, по существу имеющий обозначение 2700, который содержит первый опорный элемент 2710 пусковой штанги и второй опорный элемент 2720 пусковой штанги. Каждый из опорных элементов 2710, 2720 пусковой штанги содержит конструкцию с компрессионной лентой, которая при шарнирном повороте поддерживает пусковую штангу 1310 в боковом направлении, при этом облегчая осевое перемещение пусковой штанги 1310 между ними и ее ходы втягивания. Более конкретно, в одной конструкции первый опорный элемент 2710 пусковой штанги содержит первую компрессионную ленту 2712, которая может содержать, например, лентовидный элемент, изготовленный из пружинной стали или подобного материала. Как показано на ФИГ. 42, первая компрессионная лента 2712 включает первый проксимальный монтажный элемент 2714 в форме первого проксимального монтажного язычка 2715, выполненного с возможностью размещения внутри монтажного паза 1162 в проксимальном участке 1160 рамы. Кроме того, первая проксимальная компрессионная лента 2712 дополнительно включает первый дистальный монтажный элемент 2716 в форме первого дистального монтажного язычка 2717, который выполнен с возможностью размещения внутри первого дистального монтажного паза 1710 в выступающем вверх опорном ушке 1700, образованном в проксимальном концевом участке 1211 удлиненного канала 1210. Как, в частности, показано на ФИГ. 44, монтажный паз 1162 в проксимальном участке 1160 рамы имеет ширину FSW первого паза, которая больше толщины первого проксимального монтажного язычка 2715, для облегчения осевого перемещения первого дистального монтажного язычка 2715 внутри первого проксимального монтажного паза 1162.
Как дополнительно показано на ФИГ. 44, второй опорный элемент 2720 пусковой штанги содержит вторую компрессионную ленту 2722, которая может содержать, например, лентовидный элемент, изготовленный из пружинной стали или подобного материала. Вторая компрессионная лента 2722 включает второй проксимальный монтажный элемент 2724 в форме второго проксимального монтажного язычка 2725, который выполнен с возможностью размещения внутри монтажного паза 1164 в проксимальном участке 1160 рамы. Кроме того, вторая проксимальная компрессионная лента 2722 дополнительно включает второй дистальный монтажный элемент 2726 в форме второго дистального монтажного язычка 2727, который выполнен с возможностью размещения внутри второго дистального монтажного паза 1712 в выступающем вверх опорном ушке 1700, образованном в проксимальном концевом участке 1211 удлиненного канала 1210. Как, в частности, показано на ФИГ. 44, второй проксимальный монтажный паз 1164 имеет ширину SSW второго паза, которая больше толщины второго проксимального монтажного язычка 2725, для облегчения осевого перемещения второго проксимального монтажного язычка 2725 внутри второго проксимального монтажного паза 1164. Как также показано на ФИГ. 41, 42 и 44, в представленном варианте осуществления дистальный конец 1161 проксимального участка 1160 рамы имеет противоположные сферические поверхности 1163, 1165, которые выполнены с возможностью боковой поддержки опорных элементов 2710, 2720 пусковой штанги при шарнирном повороте концевого эффектора 1200.
Как показано на ФИГ. 41-45, хирургический инструмент 2010 дополнительно содержит выполненный с возможностью перемещения опорный узел 2800 пусковой штанги, который выполнен с возможностью обеспечения поддержки компрессионных лент 2712, 2722 при шарнирном повороте концевого эффектора 1200. В представленной конструкции выполненный с возможностью перемещения опорный узел 2800 пусковой штанги содержит узел 2810 опорной бобышки, который выполнен с возможностью вращения и перемещения в боковом направлении относительно расположенной в центре оси бобышки или опорной оси BA, которая перпендикулярна оси SA-SA ствола и параллельна оси B-B шарнирного сочленения. Как показано на ФИГ. 42, штифт 1224 опорной бобышки выступает вверх из дистального концевого участка 1211 удлиненного канала 1210. В представленной конструкции штифт 1224 опорной бобышки размещен концентрически относительно поворотного штифта 1172 таким образом, что ось BA бобышки совпадает с осью B-B шарнирного сочленения. Например, в одной конструкции штифт 1224 опорной бобышки выполнен за одно целое с поворотным штифтом 1172.
Как дополнительно показано на ФИГ. 42, в представленной конструкции узел 2810 опорной бобышки включает участок 2812 корпуса, который включает первую опорную бобышку 2820, которая расположена на расстоянии от второй опорной бобышки 2830. Первая опорная бобышка 2820 включает первую дугообразную опорную поверхность 2822, а вторая опорная бобышка 2830 включает вторую дугообразную опорную поверхность 2832. Первая дугообразная опорная поверхность 2822 расположена на расстоянии от второй дугообразной опорной поверхности 2832 с помощью паза 2834, который обладает достаточной шириной, чтобы принимать первый опорный элемент 2710 пусковой штанги и второй опорный элемент 2720 пусковой штанги и пропускать между ними пусковую штангу 1310, при этом первая дугообразная опорная поверхность сохраняет контакт по касательной с возможностью перемещения с первым опорным элементом 2710 пусковой штанги, а вторая дугообразная опорная поверхность 2832 сохраняет контакт по касательной с возможностью перемещения со вторым опорным элементом 2720 пусковой штанги при шарнирном повороте концевого эффектора 1200. Кроме того, для облегчения такого контакта между первой дугообразной опорной поверхностью 2822 и первым опорным элементом 2710 пусковой штанги и между второй дугообразной опорной поверхностью 2832 и вторым опорным элементом 2720 пусковой штанги при шарнирном повороте концевого эффектора 1200 узел 2810 опорной бобышки выполнен не только с возможностью вращения вокруг оси BA-BA бобышки, но также с возможностью перемещения в боковом направлении относительно оси BA-BA бобышки. Например, в представленной конструкции в участке корпуса 2812 образована монтажная полость 2814 для приема штифта 1224 опорной бобышки с возможностью перемещения. См. ФИГ. 43. Например, на ФИГ. 45 показано такое перемещение узла 2810 опорной бобышки в боковом направлении при шарнирном повороте, причем положение штифта 1224 опорной бобышки в монтажной полости 2814 (показана пунктирными линиями) показано пунктирными линиями. Такая конструкция позволяет узлу 2810 опорной бобышки перемещаться в боковых направлениях, которые, например, перпендикулярны оси SA-SA ствола. На ФИГ. 45 показан шарнирный поворот концевого эффектора 1200 вокруг оси шарнирного сочленения (не показана) в первом направлении FD. Как показано на этой фигуре, помимо перемещения в боковом направлении и вращения узла 2800 опорной бобышки с обеспечением боковой (противодеформационной) поддержки опорных элементов 2710, 2720 пусковой штанги, а также пусковой штанги 1310 можно заметить перемещение первого проксимального монтажного язычка 2715 относительно второго проксимального монтажного язычка 2725 по оси в соответствующих монтажных пазах 1164, 1162. Таким образом, такая конструкция обеспечивает эффективную противодеформационную поддержку пусковой штанги 1310 при шарнирном повороте концевого эффектора 1200, при этом позволяя пусковой штанге 1310 перемещаться по оси во время пускового хода и хода втягивания. Хотя опорный узел 2800 пусковой штанги подходит для применения в сочетании с опорными элементами пусковой штанги и/или конструкциями с компрессионными пластинами различных типов, которые описаны в настоящем документе, также следует понимать, что опорный узел 2800 пусковой штанги может эффективно использоваться с хирургическими инструментами, которые не включают такие конструкции. Например, в таких альтернативных конструкциях опорный узел пусковой штанги выполнен с возможностью обеспечения поддержки непосредственно самой пусковой штанги при шарнирном повороте вокруг шарнирного сочленения.
На ФИГ. 46-48 показан другой хирургический инструмент 2010, который может быть, например, идентичен хирургическому инструменту 1010, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, в хирургическом инструменте 2010 используется опорный узел пусковой штанги, по существу имеющий обозначение 2900, который содержит множество выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги, которые поддерживаются на части пусковой штанги 1310. Для наглядности самый проксимальный выполненный с возможностью перемещения опорный элемент пусковой штанги имеет обозначение 2910P, а самый дистальный выполненный с возможностью перемещения опорный элемент пусковой штанги имеет обозначение 2910D. В представленной конструкции каждый из выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги имеет одну и ту же форму и конфигурацию. Например, как, в частности, показано на ФИГ. 47, каждый выполненный с возможностью перемещения опорный элемент 2910 пусковой штанги включает первую опорную бобышку 2912, которая расположена на расстоянии от второй опорной бобышки 2914. Первая опорная бобышка 2912 включает первую дугообразную опорную поверхность 2916, а вторая опорная бобышка 2914 включает вторую дугообразную опорную поверхность 2918. Например, в представленном варианте осуществления каждая из первой и второй опорных бобышек 2912, 2914 имеет круглую форму поперечного сечения. Первая дугообразная опорная поверхность 2916 расположена на расстоянии от второй дугообразной опорной поверхности 2918 с помощью паза 2919, который обладает достаточной шириной для размещения между ними пусковой штанги 1310, при этом первая дугообразная опорная поверхность 2916 сохраняет контакт по касательной с возможностью перемещения с участком боковой стенки пусковой штанги 1310, а вторая дугообразная опорная поверхность 2918 сохраняет контакт по касательной с возможностью перемещения с другим участком боковой стенки опорного элемента 1310 пусковой штанги при шарнирном повороте концевого эффектора 1200. Следует понимать, что первая и вторая опорные бобышки 2912, 2914 препятствуют деформации пусковой штанги 1310 при шарнирном повороте и приведении в действие пусковой штанги 1310.
Как также показано на ФИГ. 46-48, каждый из выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги имеет противоположные дугообразные закругленные поверхности 2920, которые образуют центральную контактную область или опорную точку 2922. На ФИГ. 48 показаны положения выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги при шарнирном повороте концевого эффектора 1200. Как показано на этой фигуре, выполненные с возможностью перемещения опорные элементы 2910 пусковой штанги поворачиваются относительно друг друга, при этом оставаясь в контакте друг с другом для поддержки пусковой штанги 1310 и предотвращения ее деформации при шарнирном повороте и применении. Как показано на ФИГ. 48, дистальный конец 1161 проксимального участка 1160 рамы имеет противоположные сферические поверхности 1163, 1165, которые служат для поддержки участков самого проксимального выполненного с возможностью перемещения опорного элемента 2910P пусковой штанги при шарнирном повороте. Аналогично каждое из выступающих вверх опорных ушек 1700 включает дугообразную или вогнутую поверхность 1701 для размещения в ней части самого дистального выполненного с возможностью перемещения опорного элемента 2910D пусковой штанги при шарнирном повороте.
На ФИГ. 49-51 показано применение эластичных элементов 2930 для обеспечения поддержки выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги и поддержания закругленных поверхностей 2920 смежных выполненных с возможностью перемещения опорных элементов 2910 пусковой штанги в поворотном контакте друг с другом. В одном примере применяются два эластичных элемента 2930, и каждый из них может включать кабельный или проволочный элемент, который имеет дистальный конец 2932, закрепленный в выступающем вверх опорном ушке 1700. Проксимальный конец (не показан) каждого эластичного элемента 2930 может быть размещен в ручке или корпусе и может удерживаться в этом положении с возможностью перемещения. На ФИГ. 51 показан шарнирный поворот концевого эффектора 1200, причем эластичные элементы 2930 удерживают смежные выполненные с возможностью перемещения опорные элементы 2910 пусковой штанги в контакте друг с другом с образованием таким образом дугообразной опорной конструкции для предотвращения деформации пусковой штанги 1310 при шарнирном повороте. На ФИГ. 52 показан опорный узел 2900 пусковой штанги, который может использоваться в сочетании с выполненным с возможностью шарнирного поворота концевым эффектором, соединенным с удлиненным стволом с помощью гибкой соединительной конструкции, тип которой описан, например, в патенте США № 7,213,736, озаглавленном SURGICAL STAPLING INSTRUMENT INCORPORATING AN ELECTROACTIVE POLYMER ACTUATED FIRING BAR TRACK THROUGH AN ARTICULATION JOINT, который полностью включен в настоящий документ путем ссылки. Например, в этой конструкции концевой эффектор 1200 может быть выполнен с возможностью шарнирного поворота при применении шарнирного поворотного движения к одному из эластичных элементов 2930 в зависимости от желаемого направления шарнирного поворота. Более конкретно, как показано на ФИГ. 52, чтобы заставить концевой эффектор шарнирно повернуться в первом направлении FD, к первому эластичному элементу 2931 применяется шарнирное поворотное движение в форме первой силы FTF натяжения. На первый эластичный элемент 2931 может воздействовать первая сила FTF натяжения, прилагаемая конструкцией исполнительного механизма (не показана) в ручке или корпусе, которые выполнены с возможностью натяжения первого эластичного элемента 2931 в проксимальном направлении PD. Аналогично, чтобы заставить концевой эффектор шарнирно повернуться во втором направлении SD, ко второму эластичному элементу 2933 применяется шарнирное поворотное движение в форме второй силы STF натяжения. На второй эластичный элемент 2933 может воздействовать вторая сила STF натяжения, прилагаемая конструкцией исполнительного механизма (не показана) в ручке или корпусе, которые выполнены с возможностью натяжения второго эластичного элемента 2933 в проксимальном направлении PD.
При шарнирном повороте концевого эффектора приводной механизм шарнирного сочленения испытывает определенное напряжение, вследствие чего пусковые штанги легче деформируются и таким образом потенциально снижаются передаваемые ими нагрузки. Такие проблемы можно решить с помощью различных опорных узлов пусковой штанги, описанных в настоящем документе. На ФИГ. 53-58 показан другой хирургический инструмент 3010, который может быть, например, идентичен хирургическому инструменту 10, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, в хирургическом инструменте 3010 применяется подвижный опорный узел пусковой штанги, по существу имеющий обозначение 3100, в сочетании с опорным узлом 600 пусковой штанги, как подробно описано выше. Как описано выше, узел 601 направляющей пусковой штанги включает проксимальный конец 602 и дистальный конец 604, которые взаимно соединены с помощью опорных элементов 606, 608 пусковой штанги, которые разделены пазом 610 пусковой штанги, который проходит через проксимальный и дистальный концы 602, 604. Проксимальный конец 602 узла 601 направляющей пусковой штанги размещается в проксимальной полости 169 для штанги, образованной в дистальном концевом участке 164 проксимального участка 160 рамы. Дистальный конец 604 узла 601 направляющей пусковой штанги размещается в дистальной полости 224 для стержня, образованной в выступающем вверх опорном ушке 1700, образованном в проксимальном концевом участке 211 удлиненного канала 210. Для облегчения осевого перемещения узла 601 направляющей пусковой штанги при шарнирном повороте концевого эффектора 200 проксимальная полость 169 для штанги имеет размеры относительно проксимального концевого участка 602 узла 601 направляющей пусковой штанги, допускающие осевое перемещение в ней проксимального концевого участка 602. Аналогично дистальная полость 224 для штанги может иметь размеры относительно дистального концевого участка 604 узла 601 направляющей пусковой штанги для облегчения осевого перемещения узла 601 направляющей пусковой штанги относительно удлиненного канала 210 при его шарнирном повороте.
Как показано на ФИГ. 54, в представленном примере подвижный или выполненный с возможностью перемещения опорный узел 3100 пусковой штанги содержит опорное основание 3102, которое поддерживается с возможностью перемещения на выступающем вверх поворотном штифте 174, образованном на узле 159 рамы. Более конкретно, поворотный штифт 174 размещается с возможностью вращения в отверстии 3104 для поворотного штифта в опорном основании 3102 таким образом, что поворотный штифт 174 проходит вверх через него. Опорное основание 3102 выполнено с возможностью перемещения вокруг оси A1-A1 основания, образованной поворотным штифтом 174. Кроме того, опорное основание 3102 включает удлиненный паз 3106, который имеет размеры, позволяющие размещать с возможностью перемещения направляющий штифт 1708 предохранительного основания, который образован на проксимальном концевом участке или монтажном элементе 211 удлиненного канала 210. См. ФИГ. 55. Кроме того, подвижный опорный узел 3100 штанги включает первую выполненную с возможностью перемещения направляющую 3110 опоры или штифта и вторую выполненную с возможностью перемещения направляющую 3120 опоры или штифта. Первая и вторая выполненные с возможностью перемещения направляющие 3110, 3120 штифта могут перемещаться независимо друг от друга и относительно опорного основания 3102 вокруг оси GA-GA направляющей, образованной отверстием 3108 для поворотного штифта в опорном основании 3102. Например, как показано на ФИГ. 54, первая выполненная с возможностью перемещения направляющая 3110 штифта содержит первое основание 3112 направляющей штифта, которое имеет выступающие из него первый выступающий вверх опорный элемент или штифт 3114 и второй выступающий вверх опорный элемент или штифт 3116. Аналогично вторая выполненная с возможностью перемещения направляющая 3120 штифта содержит второе основание 3122 направляющей штифта, которое имеет первичный выступающий вверх опорный элемент или штифт 3124 и вторичный выступающий вверх опорный элемент или штифт 3126. Второе основание 3122 направляющей штифта включает монтажный штифт 3125, который проходит через монтажное отверстие 3113 в первом основании 3112 направляющей штифта и размещается в монтажном отверстии 3108 в опорном основании 3102.
В представленном примере первый опорный элемент или штифт 3114 и первичный опорный элемент или штифт 3124 выполнены с возможностью контакта с возможностью перемещения с первой боковой пластиной 606 узла 601 направляющей пусковой штанги в зависимости от направления шарнирного поворота концевого эффектора. Аналогично второй опорный элемент или штифт 3116 и вторичный опорный элемент или штифт 3126 выполнены с возможностью контакта с возможностью перемещения со второй боковой пластиной 608 в зависимости от направления шарнирного поворота. Первый и первичный штифты 3114, 124 выполнены с возможностью скользящего контакта с первой боковой пластиной 606, а второй и вторичный штифты 3116, 3126 выполнены с возможностью скользящего контакта со второй боковой пластиной 608, когда концевой эффектор находится в шарнирно неповернутом положении (совмещен с осью SA-SA ствола). Такая конструкция служит для поддержки пусковой штанги при шарнирном повороте и перед ним. В альтернативным примерах выполненный с возможностью перемещения опорный узел 3100 пусковой штанги может применяться без узла 601 направляющей пусковой штанги или опорных пластин пусковой штанги и т. п. Например, в таких конструкциях первый и первичный штифты 3114, 3124 могут контактировать непосредственно с первым участком боковой стороны пусковой штанги, а второй и вторичный штифты 3116, 3126 могут контактировать непосредственно со вторым участком боковой стороны пусковой штанги для обеспечения непосредственной противодеформационной поддержки пусковой штанги.
На ФИГ. 59-63 показан другой хирургический инструмент 3010ʹ, который может быть, например, идентичен хирургическому инструменту 3010, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, подвижный или выполненный с возможностью перемещения опорный узел 3100ʹ пусковой штанги включает только два выступающих вверх опорных штифта 3114ʹ и 3116ʹ. Опорное основание 3102ʹ по существу аналогично основанию 3102, за исключением того, что выступающие вверх штифты 3114ʹ и 3116ʹ соединены непосредственно с основанием 3102ʹ и перемещаются вместе с ним.
Подвижный или выполненный с возможностью перемещения опорный узел 3100 и 3100ʹ пусковой штанги имеет несколько преимуществ в сравнении с конструкциями предшествующего уровня техники. Например, в такой конструкции существует связь между углом шарнирного поворота и степенью боковой поддержки, обеспечиваемой для пусковой штанги. Такой подвижный вариант осуществления активной опоры не только поворачивается при шарнирном повороте фиксатора дистального и проксимального каналов, он также поворачивает сами опорные элементы (выполненные с возможностью перемещения штифты) относительно опорных пластин с изменением длины неподдерживаемых участков в зависимости от угла шарнирного поворота. С помощью динамического анализа можно отрегулировать изменения упругости опорной пластины, чтобы обеспечить дополнительную поддержку в полностью шарнирно повернутом положении или дополнительную поддержку в прямом положении, в зависимости от требований. Традиционные конструкции опорной пластины и предохранительной пластины не предусматривают регулировки и обеспечивают одинаковую поддержку в любой точке в диапазоне шарнирного поворота. Такая динамически изменяющаяся опорная конструкция может быть выполнена с возможностью поддержки системы, когда она находится в наиболее уязвимом положении, при этом также можно избежать избыточной компенсации, когда система находится в сильном положении. Самоблокирующиеся поворотные конструкции выполнены с возможностью поворота только до момента их нагружения, после чего они зажимаются и обеспечивают поддержку. Такие конфигурации относительно просты в производстве и сборке. «Динамически изменяющийся» означает, что неподдерживаемый участок может изменяться в зависимости от риска деформации. Подвижная конструкция может успешно применяться в сочетании с опорными элементами различных конфигураций, описанных в настоящем документе.
Основная идея активной опоры заключается в установлении взаимосвязи между углом шарнирного поворота и степень поддержки, которая обеспечивается для пусковой штанги и опорного элемента пусковой штанги. Этого можно достичь путем создания соединения, которое обеспечивает более короткую неподдерживаемую зону, в которой наиболее вероятна деформация штанг (т. е. больший угол шарнирного поворота). Выполненные с возможностью перемещения конфигурации подвижных конструкций, описанные в настоящем документе, обеспечивают поддержку фиксаторов дистального и проксимального каналов и позволяют опорному узлу поворачиваться и скользить относительно них. Такая конструкция обеспечивает поддержку для наружной опорной пластины шарнирного сочленения, когда для нее необходима более короткая неподдерживаемая зона. Другая особенность заключается в том, что правая и левая опорные пластины также соединены друг с другом, при этом само соединение дополнительно повышает устойчивость к деформации, поскольку внутренняя и наружная опорные пластины деформируются, препятствуя выходу системы из строя.
На ФИГ. 64-71 представлены различные опорные узлы пусковой штанги, которые могут применяться с различными примерами хирургических инструментов, описанными в настоящем документе. На ФИГ. 64 представлен вид в перспективе опорного узла 600 пусковой штанги, который подробно описан выше. На ФИГ. 65 и 66 показан опорный узел 2700ʹ пусковой штанги, аналогичный описанному выше опорному узлу 2700 пусковой штанги, за исключением, по меньшей мере, некоторых описанных ниже отличий. Например, первая и вторая компрессионные ленты 2712ʹ 2722ʹ свободно связаны друг с другом с помощью проксимального и дистального хомутов 2730, 2740, которые облегчают осевое перемещение компрессионных лент 2712ʹ, 2722ʹ относительно друг друга с поддержанием компрессионных лент 2712ʹ, 2722ʹ в компрессионном контакте с пусковой штангой 1310 подробно описанными в настоящем документе способами. Проксимальный и дистальный хомуты 2730, 2740 могут полностью проходить вокруг компрессионных лент 2712ʹ, 2722ʹ. Для облегчения соответствующего осевого перемещения лент 2712ʹ, 2722ʹ проксимальный хомут 2730 размещается в проксимальных верхней и нижней прорезях 2732, 2734 в каждой из компрессионных лент 2712ʹ, 2722ʹ, а дистальный хомут 2740 размещается в дистальных верхней и нижней прорезях в каждой из компрессионных лент 2712ʹ, 2722ʹ, как показано на фигурах. На ФИГ. 68 показан другой опорный узел 2700ʺ пусковой штанги, который идентичен опорному узлу 2700ʹ пусковой штанги, за исключением того, что хомуты 2730ʹ и 2740ʹ полностью не проходят вокруг обеих компрессионных лент 2712ʹ, 2722ʹ. В обеих конструкциях проксимальный и дистальный хомуты позволяют компрессионным пластинам перемещаться по оси относительно друг друга, при этом они препятствуют или, по меньшей мере, ограничивают боковое перемещение одного элемента от другого в перпендикулярных оси ствола направлениях. Таким образом, такая конструкция удерживает компрессионные пластины в контакте с пусковой штангой при шарнирном повороте концевого эффектора. Также следует понимать, что осевая длина прорезей по существу определяет величину относительного осевого перемещения, с которым компрессионные пластины могут двигаться относительно друг друга.
На ФИГ. 68 и 69 представлен другой опорный узел 3200 пусковой штанги, который может применяться в сочетании с хирургическими инструментами, примеры которых описаны настоящем документе. Как показано на этих фигурах, опорный узел 3200 пусковой штанги может включать опорный фиксатор 3210, который имеет отчасти форму коробки. В представленном примере фиксатор 3200 включает твердые верхний и нижний участки 3212, 3214, которые взаимно соединены расположенными на расстоянии друг от друга боковыми элементами 3216, 3218, каждый из которых имеет ряд предусмотренных в нем окон 3220 для обеспечения прогиба фиксатора (показан стрелкой B) в направлениях Z, но без существенного прогиба в направлениях Y. Проксимальный конец 3211 опорного фиксатора 3210 включает проксимальный фланец 3213 для установки с возможностью перемещения в отверстии в узле стержня или рамы хирургического инструмента, как описано в настоящем документе. Аналогично дистальный конец 3215 опорного фиксатора 3210 включает дистальный фланец 3217 для установки с возможностью перемещения в отверстии в проксимальном концевом участке удлиненного канала, как описано в настоящем документе. Как показано на фигурах, пара проходящих вниз верхних ушек 3230 выступает из верхнего участка 3212, а пара выступающих вверх нижних ушек 3232 выступает из нижнего участка 3214. Верхние и нижние ушки 3230 и 3232 формируют канал 3240 пусковой штанги, по которому пусковая штанга (не показана) может проходить по оси. В одной конструкции наружные слои пусковой штанги размещаются между ушками 3230 и 3232. Однако в представленном примере первая и вторая фрикционные шайбы 3250, 3252 могут проходить между ушками 3230, 3232. Кроме того, представленный пример включает компрессионные пластины 3260, 3262 описанного в настоящем документе типа и конструкции для обеспечения компрессионной поддержки пусковой штанги при прохождении через фиксатор, чтобы предотвратить деформацию пусковой штанги при шарнирном повороте хирургического инструмента.
На ФИГ. 70 показан другой опорный узел 3300 пусковой штанги, который может применяться в сочетании с различными хирургическими инструментами, примеры которых описаны в настоящем документе. Как показано на этих фигурах, опорный узел 3300 пусковой штанги включает трубчатый корпус 3302, который изготовлен, например, из нейлона, поликарбоната, Isoplast® и т. п. Корпус 3302 включает проход (канал) 3304 для пусковой штанги, в котором размещается пусковая штанга (не показана) с возможностью перемещения через него и который выполнен с возможностью сгибания/прогиба в направлениях Z. Проксимальный конец 3311 опорного узла 3300 пусковой штанги включает проксимальный фланец 3313 для установки с возможностью перемещения в отверстии в узле стержня или рамы хирургического инструмента, как описано в настоящем документе. Аналогично дистальный конец 32315 опорного узла 3300 пусковой штанги имеет дистальный фланец 3317 для установки с возможностью перемещения в отверстии в проксимальном концевом участке удлиненного канала, как описано в настоящем документе. На ФИГ. 71 показан другой опорный узел 3300ʹ пусковой штанги, который идентичен опорному узлу 3300 пусковой штанги, но в его боковых стенках образованы окна 3310 для повышения гибкости корпуса 3302 в направлениях Z.
На ФИГ. 72 показан пример приводимого в движение двигателем (или «силового») хирургического инструмента 4010, который включает корпус или ручку 4020, узел 4100 удлиненного ствола и концевой эффектор 4200, который функционально связан с узлом 4100 удлиненного ствола. Концевой эффектор 4200 аналогичен концевому эффектору 200, который подробно описан выше. Как указано выше и будет подробно рассмотрено далее, различные части хирургического инструмента 4010 приводятся в движение двигателем. Кроме того, узел 4010 удлиненного ствола выполнен с возможностью отсоединения от ручки 4020. Описание различных элементов и подробную информацию об этих компонентах можно найти в заявке на патент США № 13/803,053, озаглавленной INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT, публикации заявки на патент США № 2014/0263564, содержание которых полностью включено в настоящий документ путем ссылки.
Концевой эффектор 4200 включает, помимо прочего, удлиненный канал 210, который выполнен с возможностью функционального поддержания в нем кассеты 230 со скобами. Концевой эффектор 200 дополнительно включает в себя упор 250, который включает в себя корпус 252 упора, на котором присутствует нижняя поверхность 254, формирующая скобу. Узел 4120 закрывающей трубки, выдвижение которого по оси в дистальном и проксимальном направлениях обусловлено приведением в действие закрывающего спускового механизма 4028, перемещает упор 250 между открытым и закрытым положениями. Узел 4120 закрывающей трубки включает проксимальный сегмент 4123 закрывающей трубки ствола, который связан с возможностью поворота с дистальным сегментом 4130 закрывающей трубки описанными в настоящем документе способами для облегчения шарнирного поворота вокруг оси B-B шарнирного соединения. Проксимальный сегмент 4123 закрывающей трубки ствола включает проксимальный концевой участок 4200, функционально сопряженный с узлом 4202 форсунки, конструкцией 4204 барабана переключателя и узлом 4206 контактного кольца. Дополнительную информацию об узле форсунки, конструкции барабана переключателя и узле контактного кольца можно найти в публикации заявки на патент США № 2014/0263564, которая полностью включена в настоящий документ путем ссылки, а также в заявке на патент США № 14/226,075, поданной 26 марта 2014 г., озаглавленной MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES, содержание которой также полностью включено в настоящий документ путем ссылки.
Конструкции закрывающих трубок, описанные в указанных выше ссылочных документах, имеют фиксированный диапазон закрывающего хода. Таким образом, при приведении в действие закрывающего спускового механизма или другой закрывающей конструкции исполнительного механизма происходит осевое выдвижение закрывающей трубки. Амплитуда такого осевого выдвижения ограничена размером доступного в ручке или корпусе пространства для размещения всех различных компонентов закрывающей системы. Например, в портативных вариантах осуществления используется ручка, удобная для удерживания и управления одной рукой. Однако такие конструкции ручек имеют ограниченное пространство для размещения закрывающей и пусковой систем. Как подробно описано в упомянутых ссылочных документах, в некоторых конструкциях пусковой крючок связан с возможностью перемещения с закрывающим челноком, который соединен с узлом закрывающей трубки. При приведении в действие закрывающего спускового механизма соединительная тяговая конструкция выдвигает закрывающий челнок и узел закрывающей трубки по оси. Различных преимуществ можно добиться посредством увеличения размера или амплитуды такого закрывающего хода.
Узел 4100 ствола включает шасси 4300, которое выполнено с возможностью съемного соединения с ручкой 4020 различными способами, подробно описанными в вышеуказанных ссылочных документах. Как показано на ФИГ. 76 и 77, узел 4100 ствола включает проксимальный участок 4160 рамы или стержня, который включает проксимальный конец 4161, который удерживается на шасси 4300 с возможностью вращения. В представленном примере проксимальный конец 4141 проксимального участка 4160 рамы имеет резьбу 4163, образованную на нем для резьбового крепления к опоре 4180 стержня, выполненной с возможностью поддерживания на шасси 4300. Такая конструкция облегчает вращающееся соединение проксимального участка 4160 рамы с шасси 4300 таким образом, что узел 4159 стержня может избирательно поворачиваться вокруг оси SA-SA ствола относительно шасси 4300.
Как показано преимущественно на ФИГ. 75-77, сменный узел 4100 ствола включает закрывающий челнок 4350, который с возможностью скольжения поддерживается в шасси 4300 таким образом, что он может перемещаться относительно него по оси. Проксимальный сегмент 4123 закрывающей трубки соединен с закрывающим челноком 4350 для обеспечения возможность вращения относительно него. Например, соединитель 263 U-образной формы вставляется в кольцевой паз 4129 в проксимальном сегменте 4123 закрывающей трубки и удерживается внутри вертикальных пазов в закрывающем челноке 4350. Такая конструкция служит для крепления проксимального сегмента 4123 закрывающей трубки к закрывающему челноку 4350 для осевого перемещения вместе с ним, при этом проксимальный сегмент 4123 закрывающей трубки может поворачиваться относительно закрывающего челнока 4350 вокруг оси SA-SA ствола. Закрывающая пружина 4353 опирается на проксимальный сегмент закрывающей трубки 4123 и служит для смещения проксимального сегмента закрывающей трубки 4123 в проксимальном направлении PD, которое может служить для поворачивания закрывающего спускового механизма 4028 в неактивированное положение, когда узел стержня 4100 функционально соединяется с ручкой 4020.
Узел 4100 ствола дополнительно включает узел 4500 закрывающей трансмиссии для усиления величины закрывающего движения, которое применяется к закрывающему челноку 4350 и в итоге к упору посредством узла закрывающей трубки. Такая конструкция обеспечивает различные преимущества, такие как возможность увеличения закрывающего хода, что обуславливает возможность еще большего открытия браншей. Другими словами, эта возможность дополнительного хода как на проксимальном, так и на дистальном конце также обеспечивает большее втягивание дистального сегмента закрывающей трубки в проксимальном направлении, что позволяет упору больше открываться. Как показано на ФИГ. 75 и 76, закрывающая трансмиссия 4500 связывает закрывающий челнок 4350 с проксимальным закрывающим крючковым узлом 4360. Проксимальный закрывающий крючковый узел 4360 включает крючки 4362, которые выполнены с возможностью крючкового зацепления с крепежным штифтом 4033, который прикреплен ко второму закрывающему звену 4031, функционально соединенному с закрывающим спусковым механизмом 4028, как подробно описано в заявке на патент США № 14/226,075. Как описано в упомянутом ссылочном документе, при приведении в действие спускового закрывающего механизма 4028 закрывающее звено 4031 выдвигается дистально и применяет дистальное закрывающее движение к проксимальному закрывающему крючковому узлу 4360.
В представленном примере узел 4500 закрывающей трансмиссии включает проксимальную рейку 4504 закрывающего крючка, которая соединена с проксимальным закрывающим крючковым узлом 4360. Кроме того, узел 4500 закрывающей трансмиссии дополнительно включает передаточную рейку 4506, поддерживаемую с возможностью перемещения в корпусе 4502 трансмиссии. Узел 4500 закрывающей трансмиссии дополнительно включает дистальную закрывающую рейку 4508, соединенную с закрывающим челноком 4350. Закрывающее зубчатое колесо 4510 находится в зубчатом зацеплении с рейкой 4504 закрывающего крючка и передаточной рейкой 4506. Передаточная ведущая шестерня 4512 соединена с повышающей ведущей шестерней 4514 и находится в зубчатом зацеплении с передаточной рейкой 4506. Повышающее зубчатое колесо находится в зубчатом зацеплении с дистальной закрывающей рейкой 4508. Таким образом, шарнирный поворот закрывающего спускового механизма 4028 приводит к дистальному выдвижению рейки 4504 закрывающего крючка, что в итоге приводит к дистальному выдвижению дистальной рейки 4508 закрывающего крючка и закрывающего челнока 4350. Дистальное перемещение закрывающего челнока 4350 вызывает дистальное перемещение узла закрывающей трубки.
Таким образом, узел закрывающей трансмиссии по существу содержит средства для увеличения закрывающего хода узла закрывающей трубки. Например, традиционная закрывающая конструкция может содержать закрывающий исполнительный механизм, который после приведения его в действие применяет закрывающее движение к узлу закрывающей трубки. В результате применения такого закрывающего движения происходит осевое перемещение узла закрывающей трубки на протяжении закрывающего хода с максимальным диапазоном осевого закрывающего перемещения MCT. Хирургический инструмент, в котором используется узел закрывающей трансмиссии, различные типы и конструкции которого описаны в настоящем документе, будет также иметь закрывающий ход с максимальным диапазоном осевого закрывающего перемещения MCT1. С учетом того, что все прочие аспекты этих устройств в остальном одинаковы или идентичны, MCT1 > MCT.
Как показано на ФИГ. 78-80, концевой эффектор 200 связан с узлом 4100 удлиненного ствола с помощью шарнирного сочленения 109 описанного выше типа и конструкции. Однако также допускается применение других конструкций шарнирных сочленений. В представленном примере узел 4100 ствола включает узел 4120 закрывающей трубки, который включает проксимальный сегмент 4123 закрывающей трубки. Представленный пример дополнительно включает гибкий сегмент 4600 закрывающей трубки, который связан с дистальным концом дистального сегмента 4123 закрывающей трубки для перемещения вместе с ним. Гибкий сегмент 4600 закрывающей трубки имеет размеры для распределения по шарнирному сочленению 109 и включает дистальный конец 4602 и проксимальный конец 4604. Проксимальный конец 4604 соединен с дистальным концом дистального сегмента 4123 закрывающей трубки. Гибкий трубчатый сегмент 4610 проходит между проксимальным концом 4604 и дистальным концом 4602 и в представленном примере включает два расположенных на расстоянии друг от друга верхних и нижних элементов 4612, 4614 стержня, которые проходят по оси. От каждой боковой стороны проходит множество расположенных на расстоянии друг от друга реберных элементов 4616, которые служат для образования трубчатого пути, по которому проходит шарнирное сочленение. При выдвижении узла 4120 закрывающей трубки в дистальном направлении DD по оси дистальный конец 4602 гибкого сегмента 4600 закрывающей трубки вступает во взаимодействие с упором 250 различными способами, описанными в настоящем документе, для перемещения упора 250 в закрытые положения. Гибкий сегмент 4600 закрывающей трубки также адаптируется к шарнирному повороту концевого эффектора 200, как показано на ФИГ. 80.
ПРИМЕРЫ
Пример 1 - Хирургический инструмент, содержащий хирургический концевой эффектор, содержащий первый и второй элементы бранши, причем применение закрывающего перемещения к, по меньшей мере, одному из первого и второго элементов бранши приводит к перемещению, по меньшей мере, одного из первого и второго элементов бранши в закрытое положение относительно другого из первого и второго элементов бранши. Хирургический инструмент дополнительно содержит закрывающую систему, которая содержит аксиально подвижный закрывающий элемент, выполненный с возможностью применения закрывающего перемещения к, по меньшей мере, одному из первого и второго элементов бранши. Закрывающий исполнительный механизм включает в себя первую часть исполнительного механизма, которая выполнена с возможностью осевого перемещения вдоль первого участка осевого перемещения при срабатывании закрывающего исполнительного механизма. Закрывающая трансмиссия стыкуется с первой частью исполнительного механизма. Закрывающая трансмиссия содержит вторую часть исполнительного механизма, которая стыкуется с аксиально подвижным закрывающим элементом таким образом, что при срабатывании закрывающего исполнительного механизма вторая часть исполнительного механизма перемещает аксиально подвижный закрывающий элемент вдоль второго участка осевого перемещения, который больше, чем первый участок осевого перемещения.
Пример 2 - Хирургический инструмент из примера 1, в котором закрывающая трансмиссия дополнительно содержит элемент переноса, который может аксиально перемещаться между первой частью исполнительного механизма и второй частью исполнительного механизма. Передаточный элемент в функционирующем соединении с первой частью исполнительного механизма ориентирован таким образом, что осевое перемещение первой части исполнительного механизма приводит к осевому перемещению передаточного элемента. Множительный элемент функционально соединен с передаточным элементом и второй частью исполнительного механизма таким образом, что осевое перемещение передаточного элемента приводит к осевому перемещению второй части исполнительного механизма.
Пример 3 - хирургический инструмент из примеров 1 или 2, в котором первая часть исполнительного механизма содержит первую аксиально подвижную закрывающую рейку, а вторая часть исполнительного механизма содержит вторую аксиально подвижную закрывающую рейку, которая функционально соединена с первой аксиально подвижной закрывающей рейкой.
Пример 4 - Хирургический инструмент из примера 3, в котором закрывающая трансмиссия содержит передаточную рейку, которая может аксиально перемещаться между первой аксиально подвижной закрывающей рейкой и второй аксиально подвижной закрывающей рейкой. Закрывающая зубчатая шестерня поддерживается в функционирующем зацепляющем соединении с первой закрывающей рейкой и передаточной рейкой. Зубчатая передаточная шестерня удерживается в функционирующем зацепляющем соединении с передаточной рейкой. Множительная зубчатая шестерня соединена с зубчатой передаточной шестерней и ориентирована в функционирующем зацепляющем соединении со второй аксиально подвижной закрывающей рейкой.
Пример 5 - Хирургический инструмент из примеров 1, 2, 3 или 4, дополнительно содержащий корпус, который функционально удерживает закрывающий исполнительный механизм. Узел стержня функционально соединен с корпусом и хирургическим концевым эффектором, узел стержня содержит аксиально подвижный закрывающий элемент.
Пример 6 - Хирургический инструмент из примера 5, в котором узел стержня выполнен для съемного функционирующего крепления к корпусу.
Пример 7 - Хирургический инструмент из примеров 5 или 6, в котором узел стержня содержит шасси, выполненное для съемного функционирующего крепления к корпусу. Шасси функционально удерживает закрывающую трансмиссию.
Пример 8 - Хирургический инструмент из примера 5, в котором закрывающий элемент содержит полый элемент, выполненный с возможностью осевого перемещения относительно участка рамы узла стержня.
Пример 9 - Хирургический инструмент из примеров 1, 2, 3, 4, 5, 6, 7 или 8, в котором один из первого и второго элементов бранши содержит удлиненный канал, выполненный с возможностью удерживания в нем хирургической кассеты со скобами, а другой из первого и второго элементов бранши содержит упор.
Пример 10 - Хирургический инструмент из примера 5, в котором концевой эффектор функционально соединен с узлом стержня с помощью шарнирного сочленения.
Пример 11 - Хирургический инструмент из примеров 5 или 10, в котором узел стержня содержит узел рамы, который соединен с корпусом, а закрывающий элемент содержит узел закрывающей трубки, который находится с возможностью осевого перемещения на узле рамы.
Пример 12 - Хирургический инструмент из примера 11, в котором узел закрывающей трубки содержит проксимальный сегмент закрывающей трубки, который функционально стыкуется с закрывающей трансмиссией, и гибкий сегмент закрывающей трубки, который стыкуется с проксимальным сегментом закрывающей трубки и проходит над шарнирным сочленением для функционального соединения с, по меньшей мере, одним из первого и второго элементов бранши.
Пример 13 - Хирургический инструмент, включающий хирургический инструмент, который содержит концевой эффектор. Концевой эффектор содержит хирургическую кассету со скобами и
упор, причем, по меньшей мере, один из хирургической кассеты со скобами и упора перемещается в ответ на прилагаемое к нему закрывающее перемещение. Хирургический инструмент дополнительно содержит узел стержня, который функционально стыкуется с, по меньшей мере, одним из хирургической кассеты со скобами и упора. Рукоятка функционально связана с узлом стержня. Закрывающий исполнительный механизм функционально поддерживается рукояткой и включает в себя первую часть исполнительного механизма, которая выполнена с возможностью осевого перемещения вдоль предварительно заданного первого участка осевого перемещения при срабатывании закрывающего исполнительного механизма. Аксиально подвижный закрывающий элемент выполнен с возможностью применения закрывающего перемещения к, по меньшей мере, одному из хирургической кассеты со скобами и упора. Закрывающая трансмиссия стыкуется с первой частью исполнительного механизма и содержит вторую часть исполнительного механизма, которая стыкуется с аксиально подвижным закрывающим элементом таким образом, что при срабатывании закрывающего исполнительного механизма вторая часть исполнительного механизма перемещает аксиально подвижный закрывающий элемент вдоль второго участка осевого перемещения, который больше, чем первый участок осевого перемещения.
Пример 14 - Хирургический инструмент из примера 13, в котором, по меньшей мере, один из хирургической кассеты со скобами и упора соединен с узлом стержня с помощью шарнирного сочленения.
Пример 15 - Хирургический инструмент из примеров 13 или 14, в котором узел стержня содержит узел рамы, который соединен с рукояткой и, по меньшей мере, одним из хирургической кассеты со скобами и упора. Закрывающий элемент содержит узел закрывающей трубки, который находится с возможностью осевого перемещения на узле рамы.
Пример 16 - Хирургический инструмент из примера 15, в котором узел закрывающей трубки содержит проксимальный сегмент закрывающей трубки, который функционально стыкуется со второй частью исполнительного механизма. Гибкий сегмент закрывающей трубки стыкуется с проксимальным сегментом закрывающей трубки и проходит над шарнирным сочленением для функционального соединения с, по меньшей мере, одним из хирургической кассеты со скобами и упора.
Пример 17 - Хирургический инструмент из примеров 13, 14, 15 или 16, в котором вторая часть исполнительного механизма функционально соединена с первой частью исполнительного механизма с помощью аксиально подвижной передаточной рейки и множества шестерен.
Пример 18 - Хирургический инструмент, содержащий хирургический концевой эффектор, содержащий первый и второй элементы бранши, причем применение закрывающего перемещения к, по меньшей мере, одному из первого и второго элементов бранши приводит к перемещению, по меньшей мере, одного из первого и второго элементов бранши в закрытое положение относительно другого из первого и второго элементов бранши. Хирургический инструмент дополнительно содержит закрывающую систему, которая содержит аксиально подвижный закрывающий элемент, выполненный с возможностью применения закрывающего перемещения к, по меньшей мере, одному из первого и второго элементов бранши. Хирургический инструмент дополнительно содержит закрывающий исполнительный механизм, который включает в себя первую часть исполнительного механизма, которая выполнена с возможностью осевого перемещения вдоль первого участка осевого перемещения при срабатывании закрывающего исполнительного механизма. Хирургический инструмент дополнительно содержит возможности для перемещения аксиально подвижного закрывающего элемента вдоль второго участка осевого перемещения, который больше, чем первый участок осевого перемещения, при срабатывании закрывающего исполнительного механизма.
Пример 19 - Хирургический инструмент из примера 18, в котором один из первого и второго элементов бранши содержит хирургическую кассету со скобами, а другой из первого и второго элементов бранши содержит упор.
Пример 20 - Хирургический инструмент из примеров 18 или 19, в котором закрывающий исполнительный механизм содержит закрывающий спусковой механизм, который поддерживается на корпусе, который функционально соединен с концевым эффектором с помощью узла стержня.
Полное описание:
патента США № 5,403,312, озаглавленного ELECTROSURGICAL HEMOSTATIC DEVICE, выданного 4 апреля 1995 г.;
патента США № 7,000,818, озаглавленного SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, выданного 21 февраля 2006 г.;
патента США № 7,422,139, озаглавленного MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK, выданного 9 сентября 2008 г.;
патента США № 7,464,849, озаглавленного ELECTRO-MECHANICAL SURGICAL INSTRUMENT WITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS, выданного 16 декабря 2008 г.;
патента США № 7,670,334, озаглавленного SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR, выданного 2 марта 2010 г.;
патента США № 7,753,245, озаглавленного SURGICAL STAPLING INSTRUMENTS, выданного 13 июля 2010 г.;
патента США № 8,393,514, озаглавленного SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE, выданного 12 марта 2013 г.;
заявка на патент США № 11/343,803, озаглавленная SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES; в настоящее время патент США № 7,845,537;
заявки на патент США № 12/031,573, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES, поданной 14 февраля 2008 г.;
заявки на патент США с сер. № 12/031,873, озаглавленной END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT, поданной 15 февраля 2008 г., в настоящее время патент США № 7,980,443;
заявки на патент США № 12/235,782, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT, в настоящее время патент США № 8,210,411;
заявки на патент США № 12/249,117, озаглавленной POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM, в настоящее время патент США № 8,608,045;
заявки на патент США № 12/647,100, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT WITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY, поданной 24 декабря 2009 г. в настоящее время патент США № 8,220,688;
заявки на патент США № 12/893,461, озаглавленной STAPLE CARTRIDGE, поданной 29 сентября 2012 г., в настоящее время патент США № 8,733,613;
заявки на патент США с сер. № 13/036,647, озаглавленной SURGICAL STAPLING INSTRUMENT, поданной 28 февраля 2011 г., в настоящее время патент США № 8,561,870;
заявки на патент США № 13/118,241, озаглавленной SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2012/0298719;
заявка на патент США № 13/524 049, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE; поданной 15 июня 2012 г.; в настоящее время заявка на патент США № 2013/0334278;
заявки на патент США № 13/800,025, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
заявки на патент США № 13/800 067, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
опубликованной заявки на патент США № 2007/0175955, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM, поданной 31 января 2006 г.; и
опубликованной заявки на патент США № 2010/0264194, озаглавленной SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR, поданной 22 апреля 2010 г., в настоящее время патент США № 8,308,040; включены в настоящий документ путем ссылки.
Несмотря на то, что в настоящем документе описаны различные варианты осуществления изделий в их связи с определенными раскрытыми вариантами осуществления, в отношении изделия могут быть реализованы различные модификации и изменения. Также для некоторых компонентов, для которых раскрыты материалы, можно применять другие материалы. Кроме того, в соответствии с различными вариантами осуществления один компонент может быть заменен несколькими компонентами, а несколько компонентов - одним компонентом (для выполнения определенных функций). Представленное выше описание и приложенная формула изобретения охватывают все указанные изменения и дополнения.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе специалисты в данной области могут изменять множественное число на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри различных других компонентов или соединенные с ними. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности практически «связывается» так, чтобы достичь желаемой функциональности. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, и любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают, помимо прочего, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
Хотя в настоящем документе описаны различные варианты осуществления, специалистам в данной области может быть очевидна возможность множества модификаций, вариантов, замен, изменений и эквивалентов для этих вариантов осуществления. Также для некоторых компонентов, для которых раскрыты материалы, можно применять другие материалы. Таким образом, следует понимать, что представленное выше описание и приложенные пункты формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых вариантов осуществления. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае устройство можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать в себя любую комбинацию этапов разборки устройства, последующей очистки или замены конкретных частей и последующей повторной сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно селективно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно снова собрать для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать различные методики разборки, очистки, замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство целиком входят в объем настоящей заявки.
Предпочтительно описанный здесь предмет изобретения будет проходить обработку перед проведением хирургической операции. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Затем тару и инструмент помещают в поле излучения, которое может проникать в тару, такого как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение уничтожает бактерии на инструменте и в таре. Стерилизованный инструмент может затем храниться в стерильной таре. Герметичная тара сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в какой включенный материал не противоречит существующим определениям, положениям и другому материалу описания, представленному в настоящем описании. Таким образом, в необходимой степени описание, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим ему материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Представленное выше описание одного или более вариантов осуществления было представлено для целей иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытым вариантом. В свете всего вышесказанного возможны модификации и варианты. Один или более вариантов осуществления были выбраны и описаны для иллюстрации принципов и способов практической реализации, посредством чего позволяя специалисту в данной области использовать различные варианты осуществления изобретения, а также с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем изобретения определен в прилагаемых пунктах формулы изобретения.
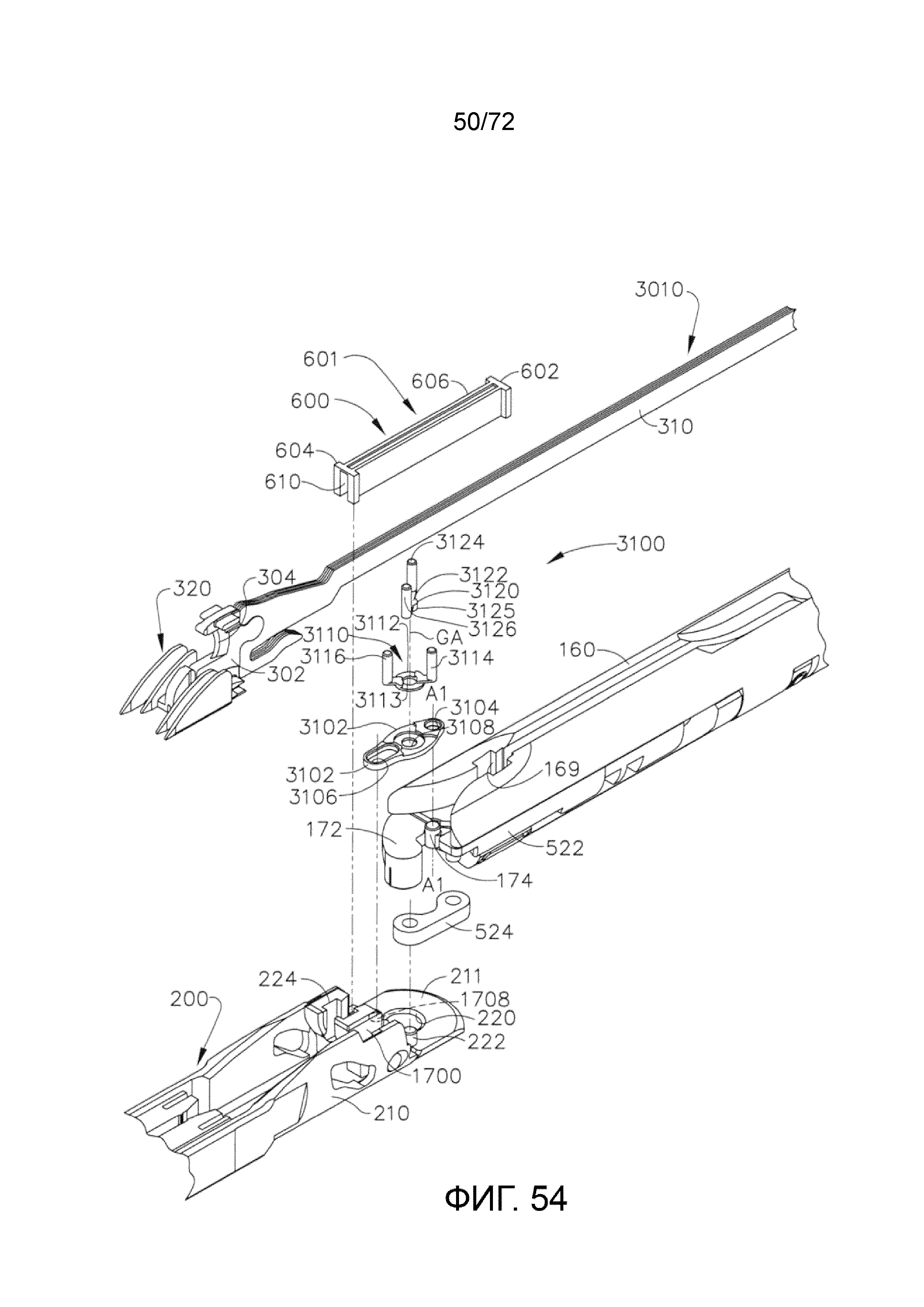
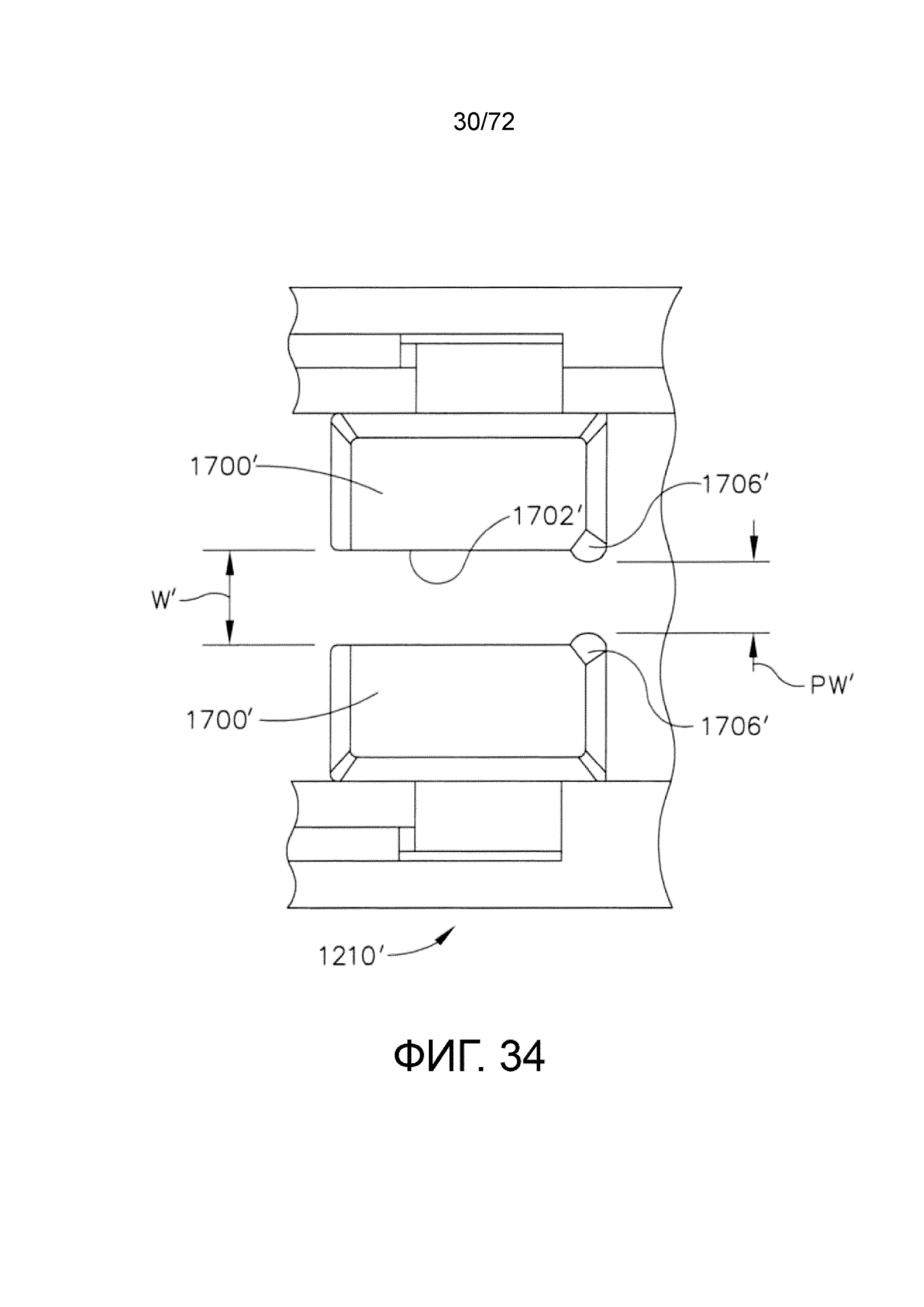
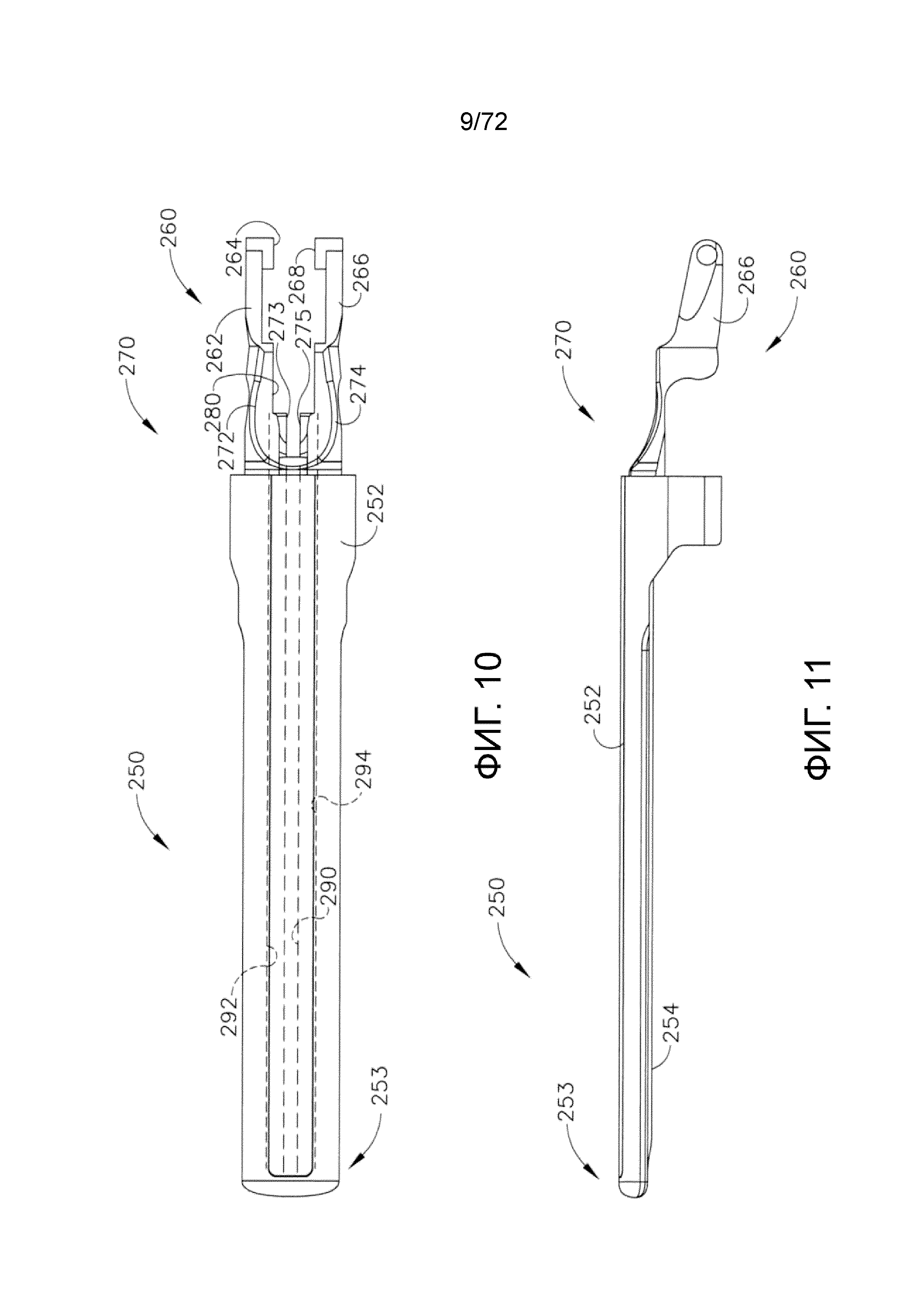
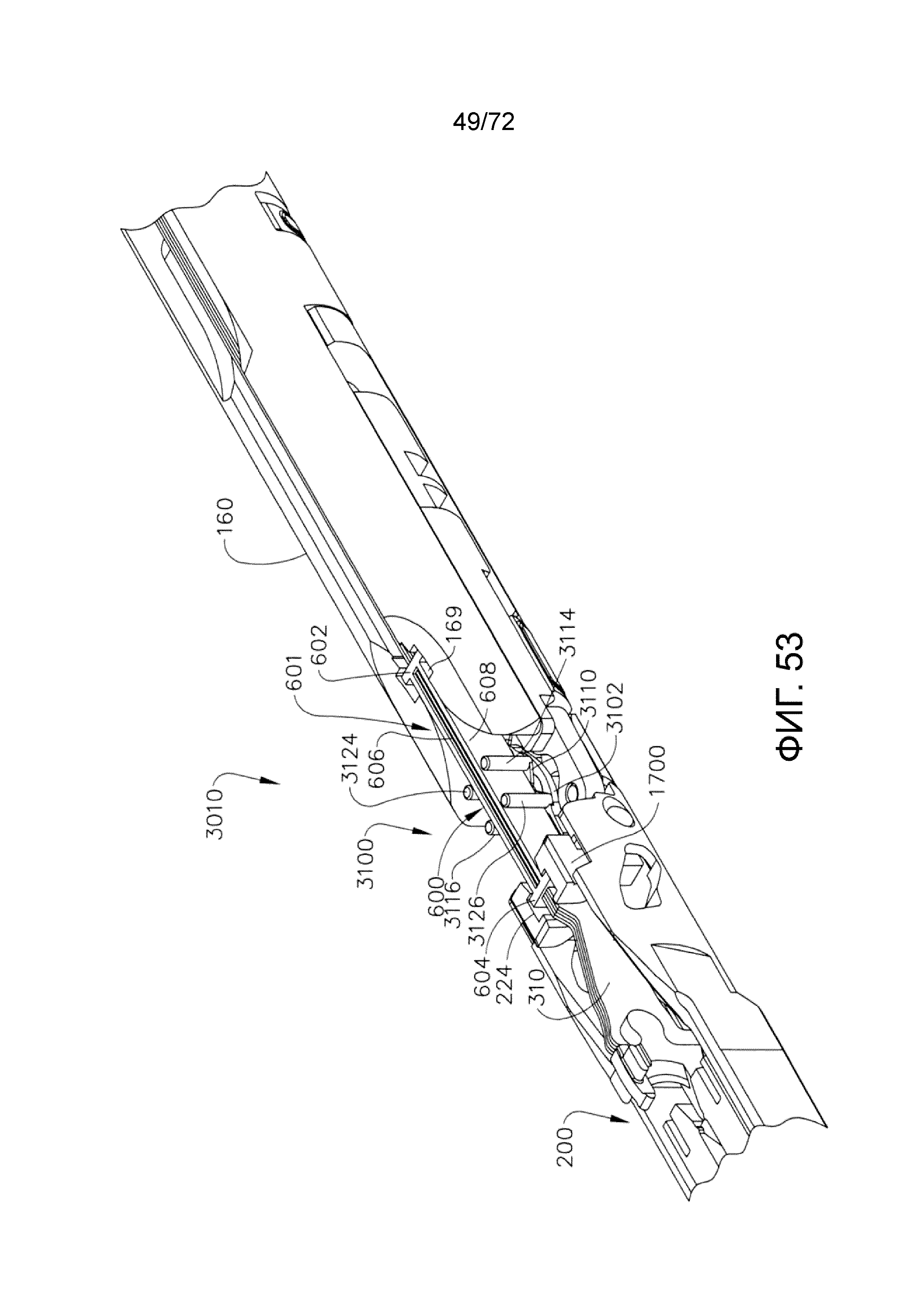
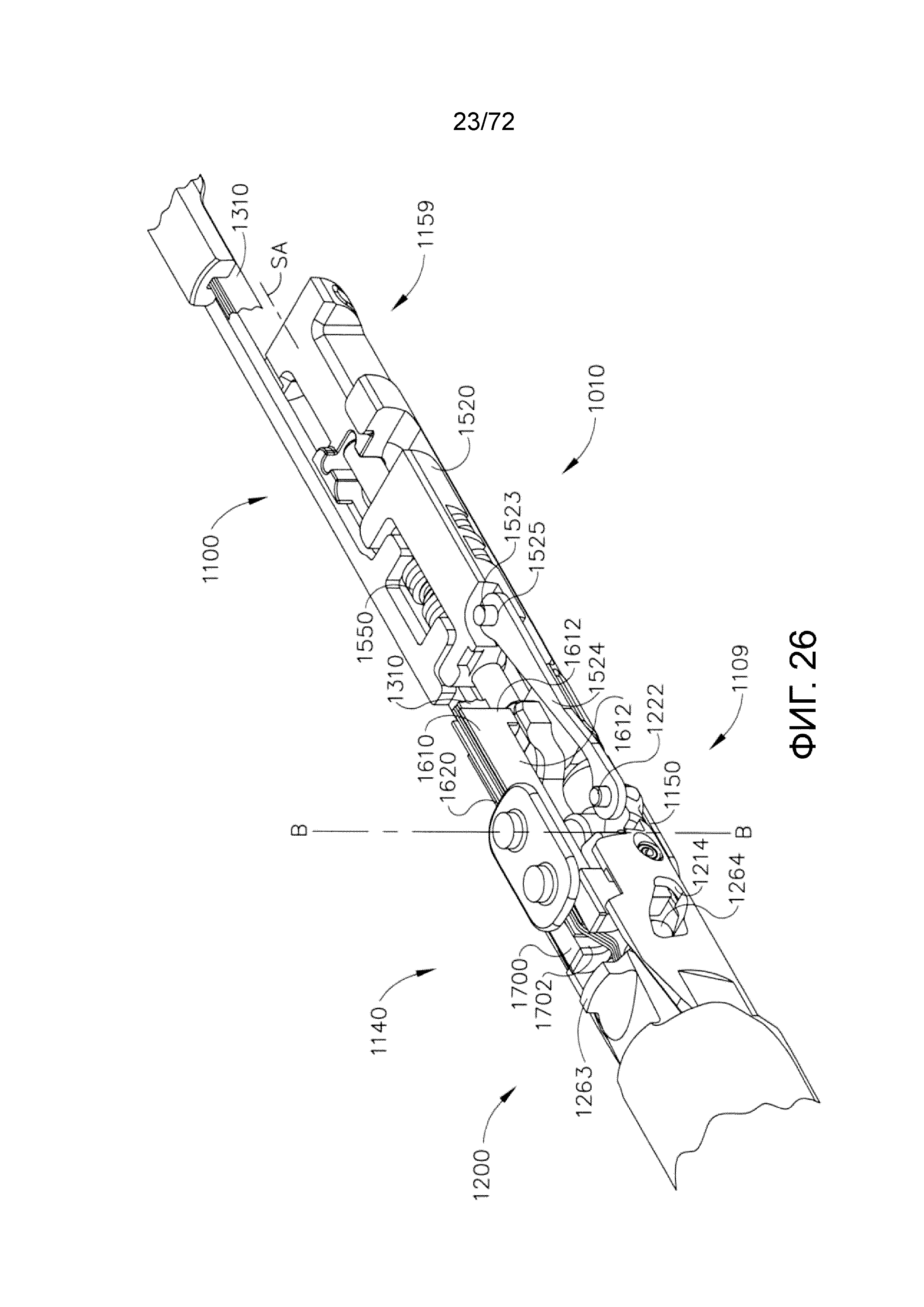
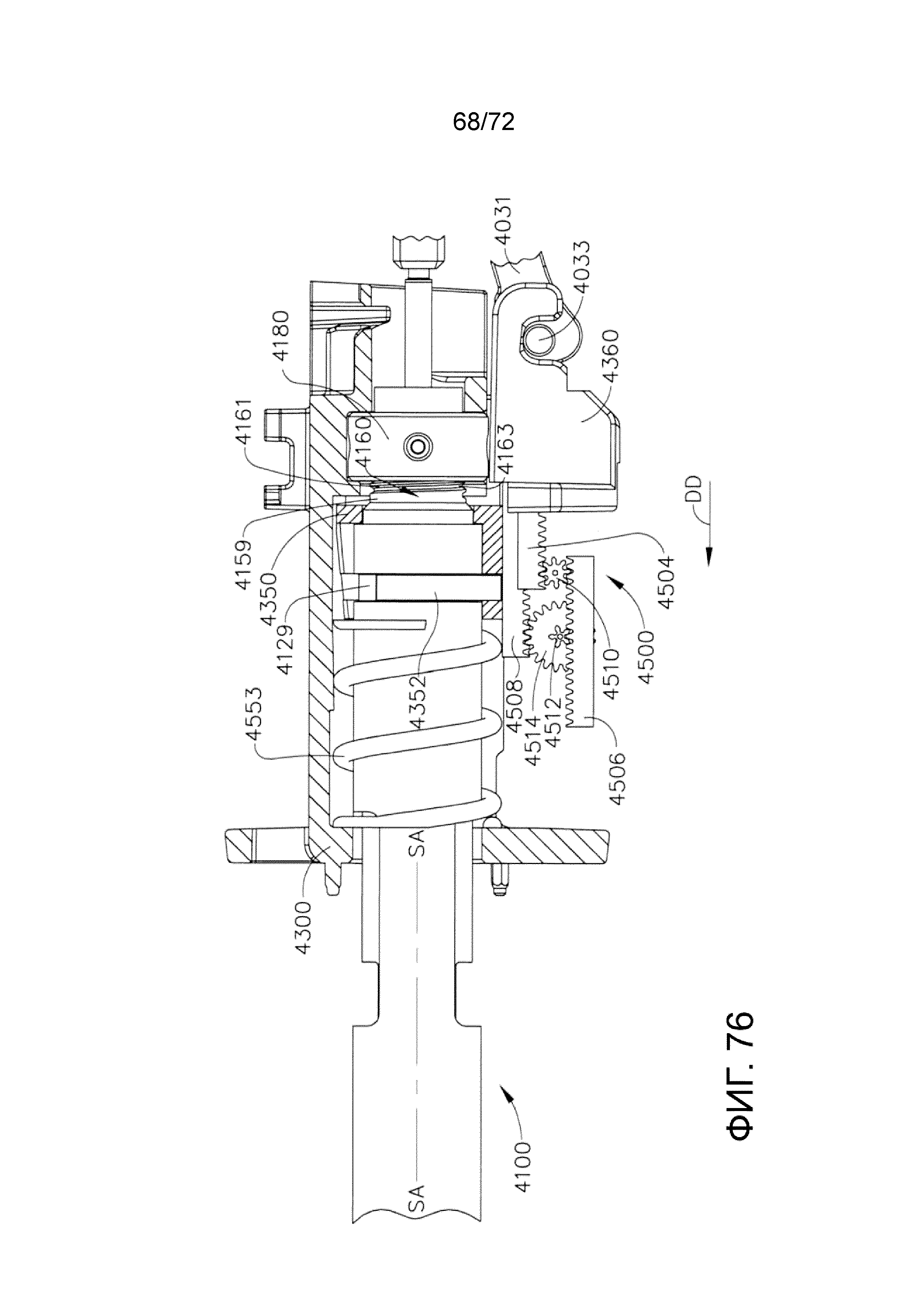
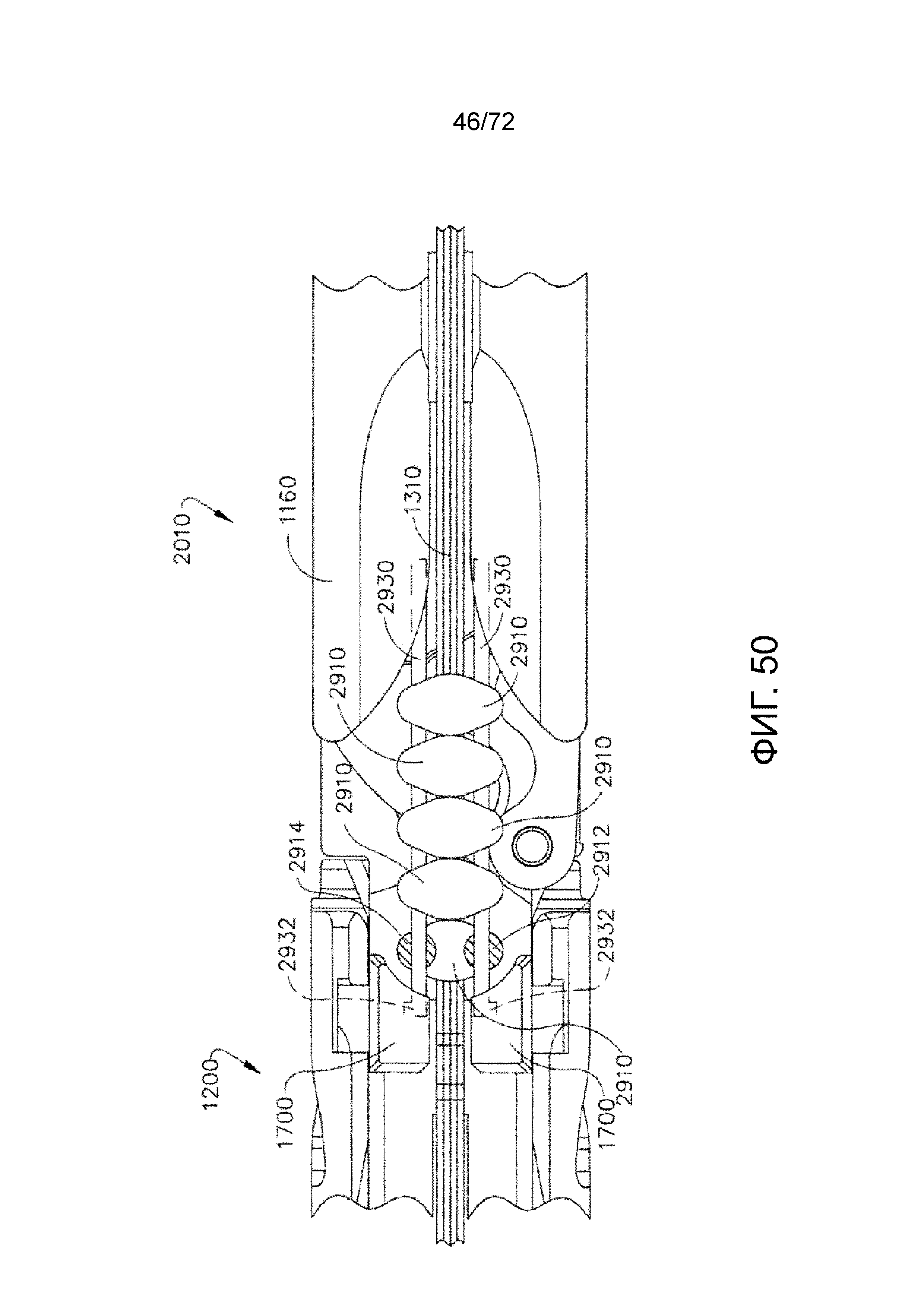
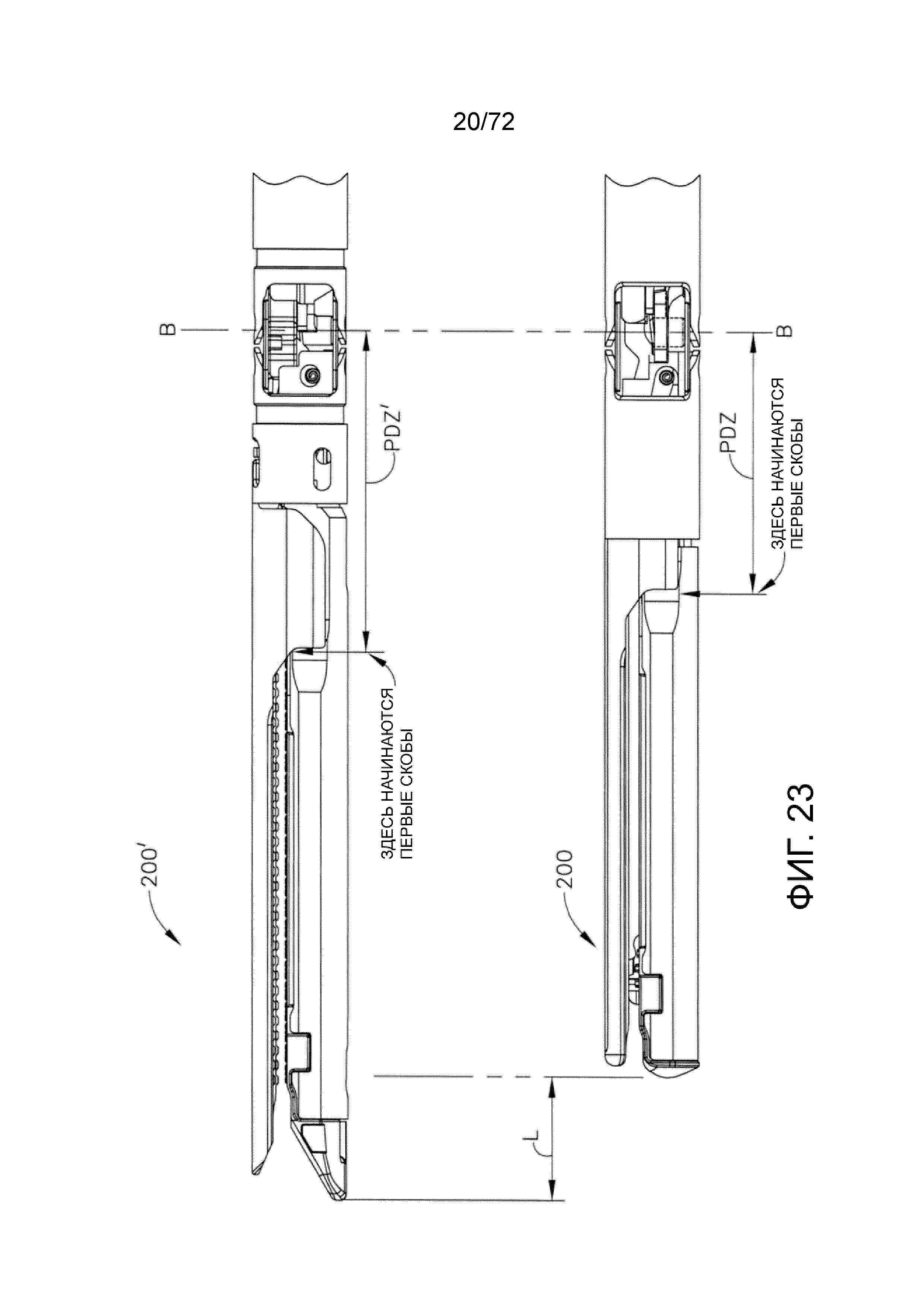
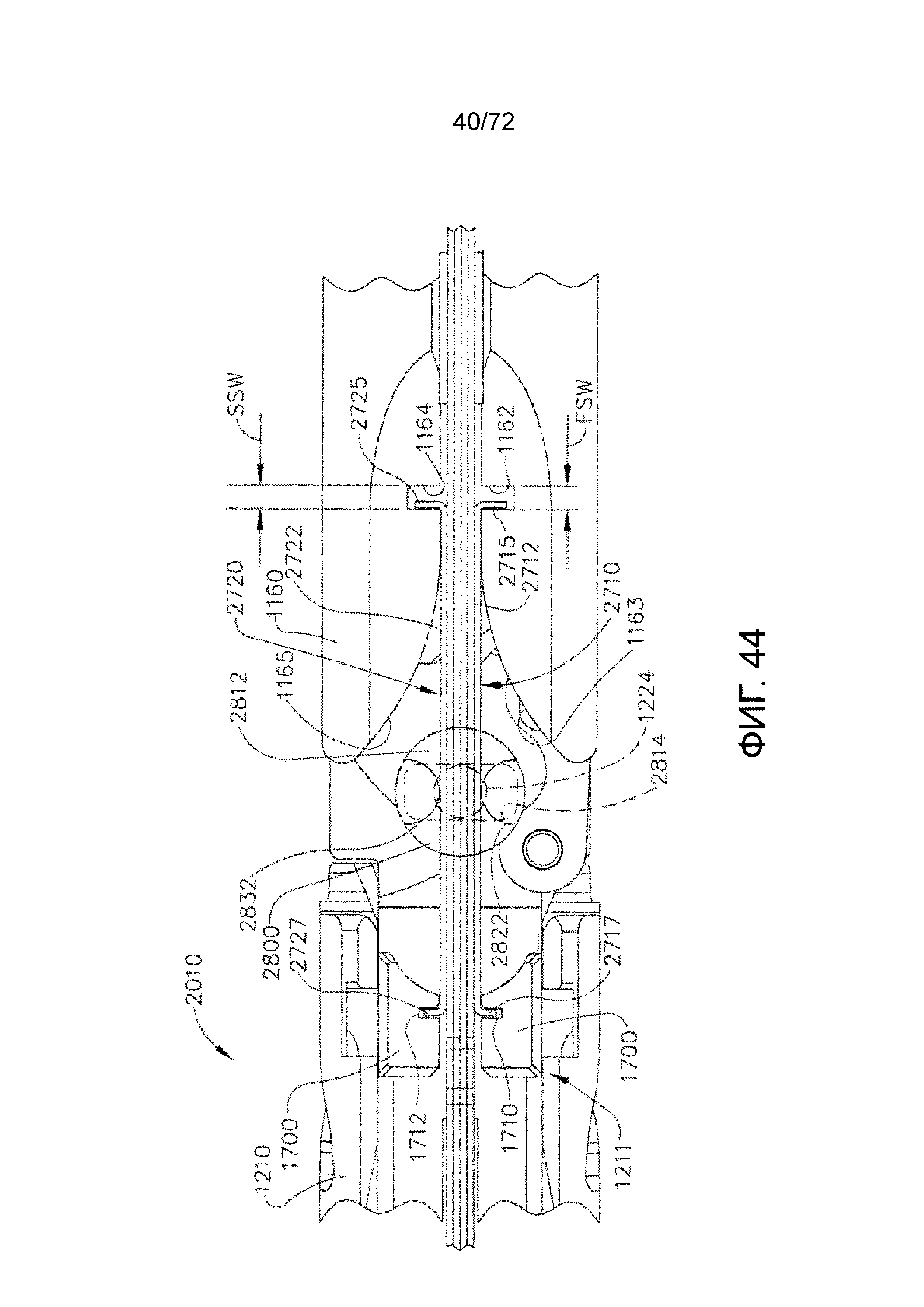
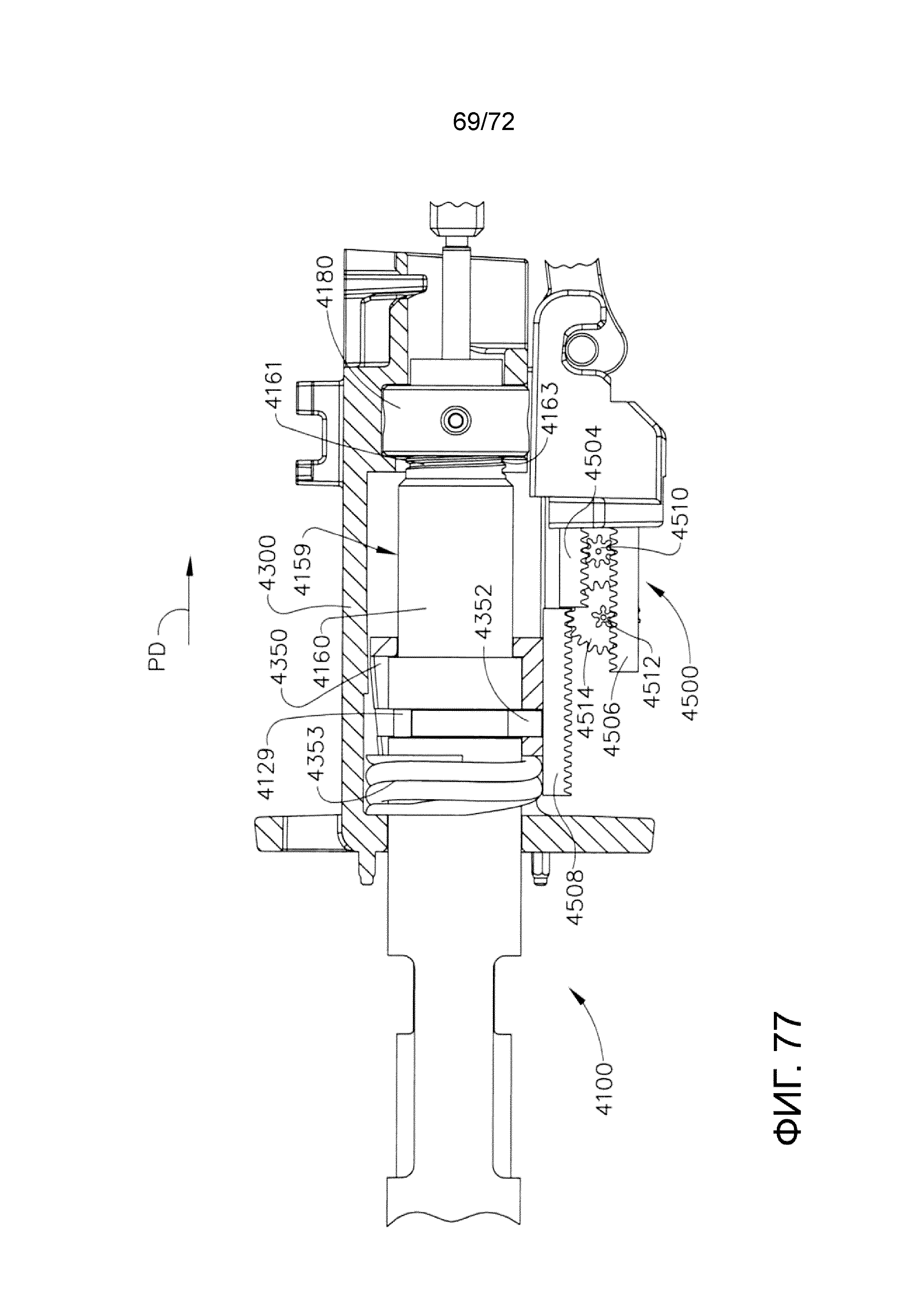
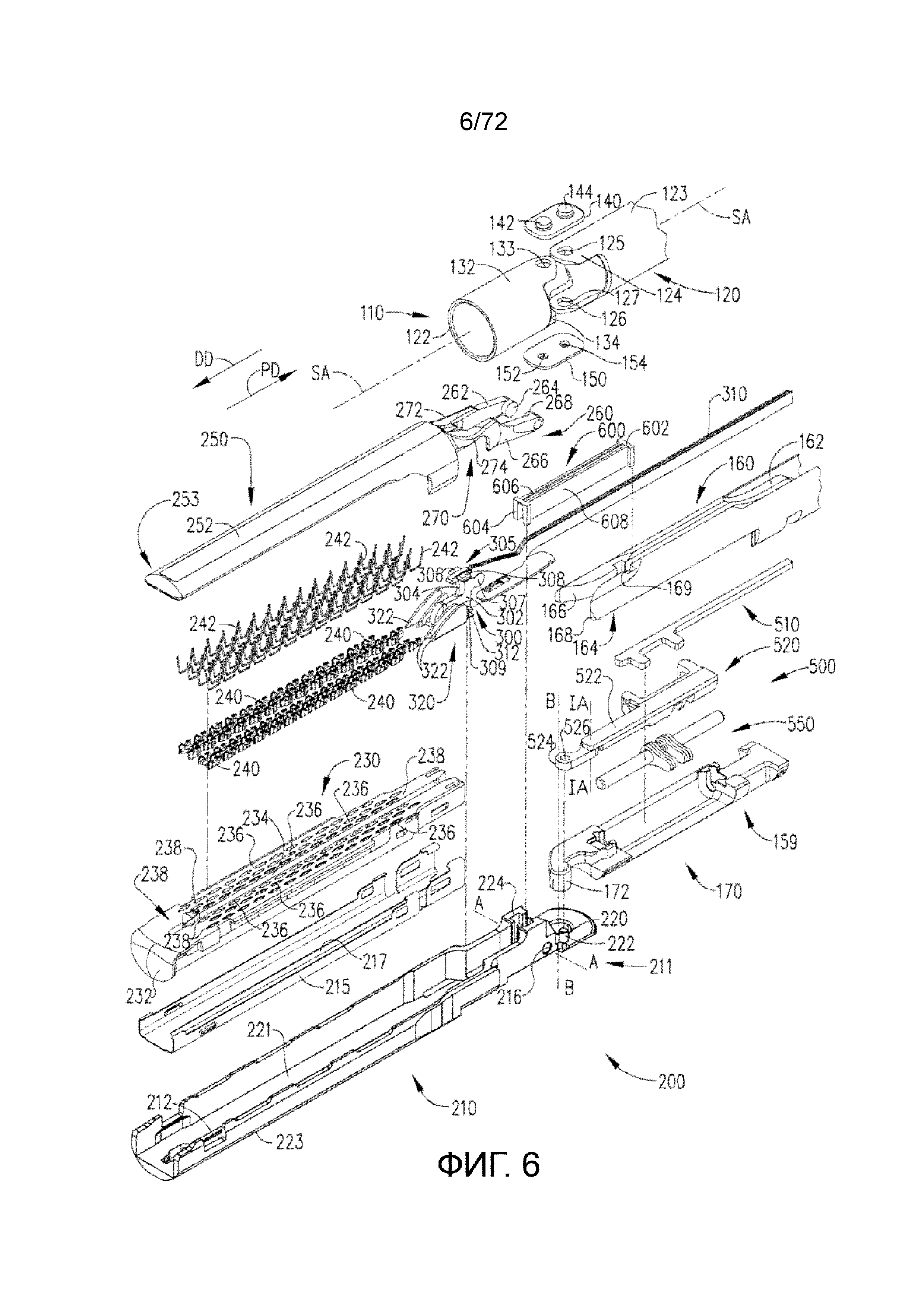
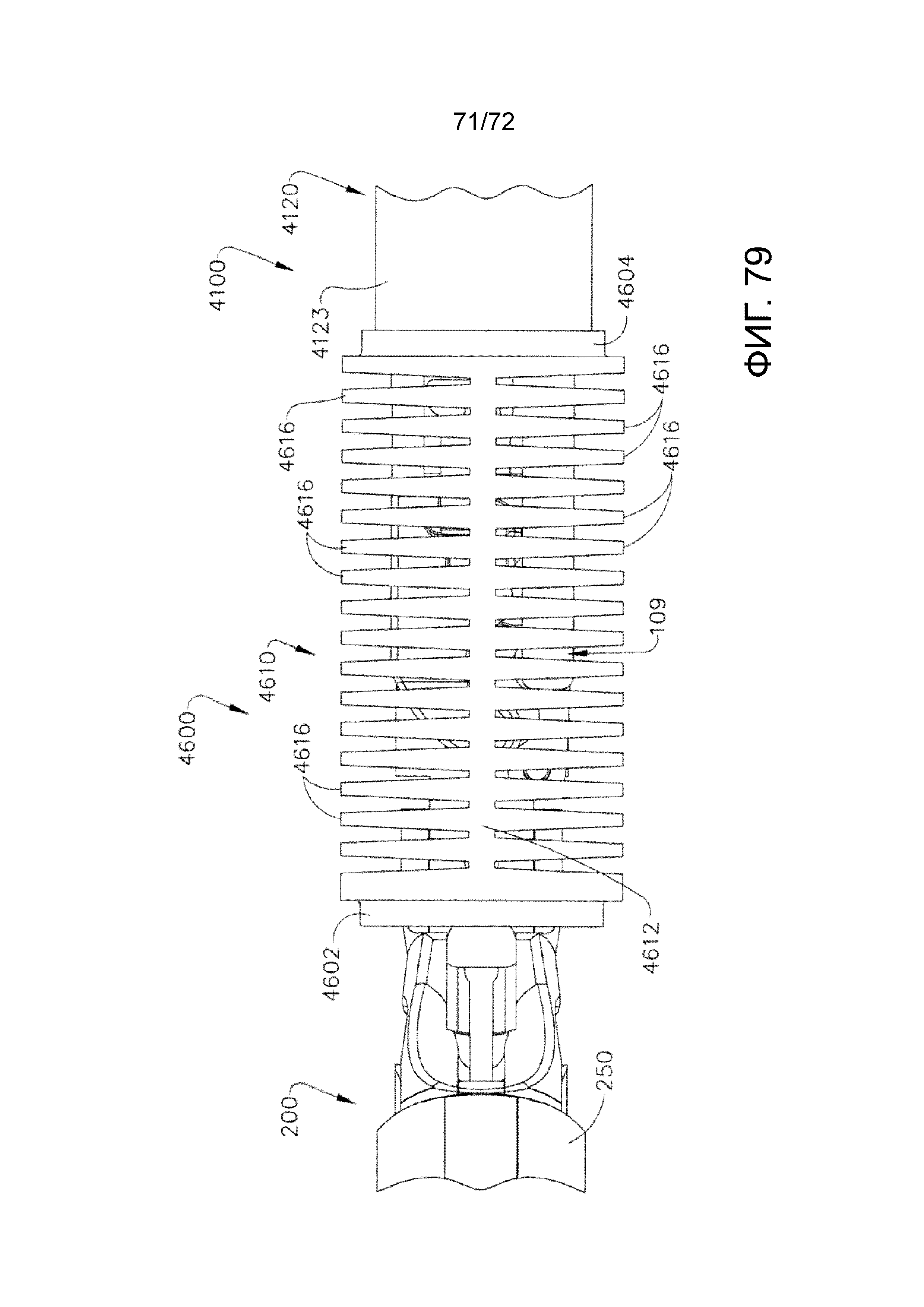
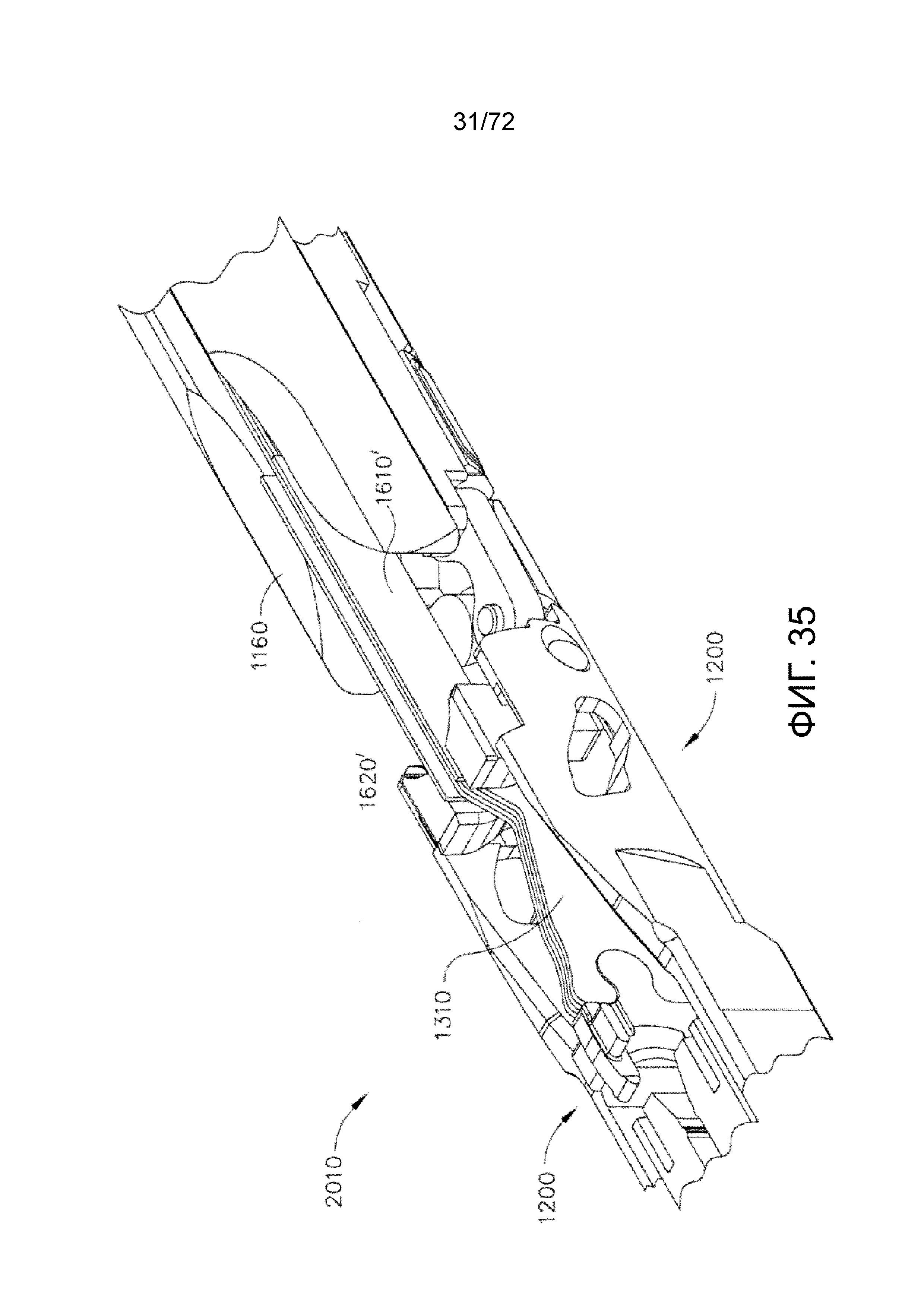
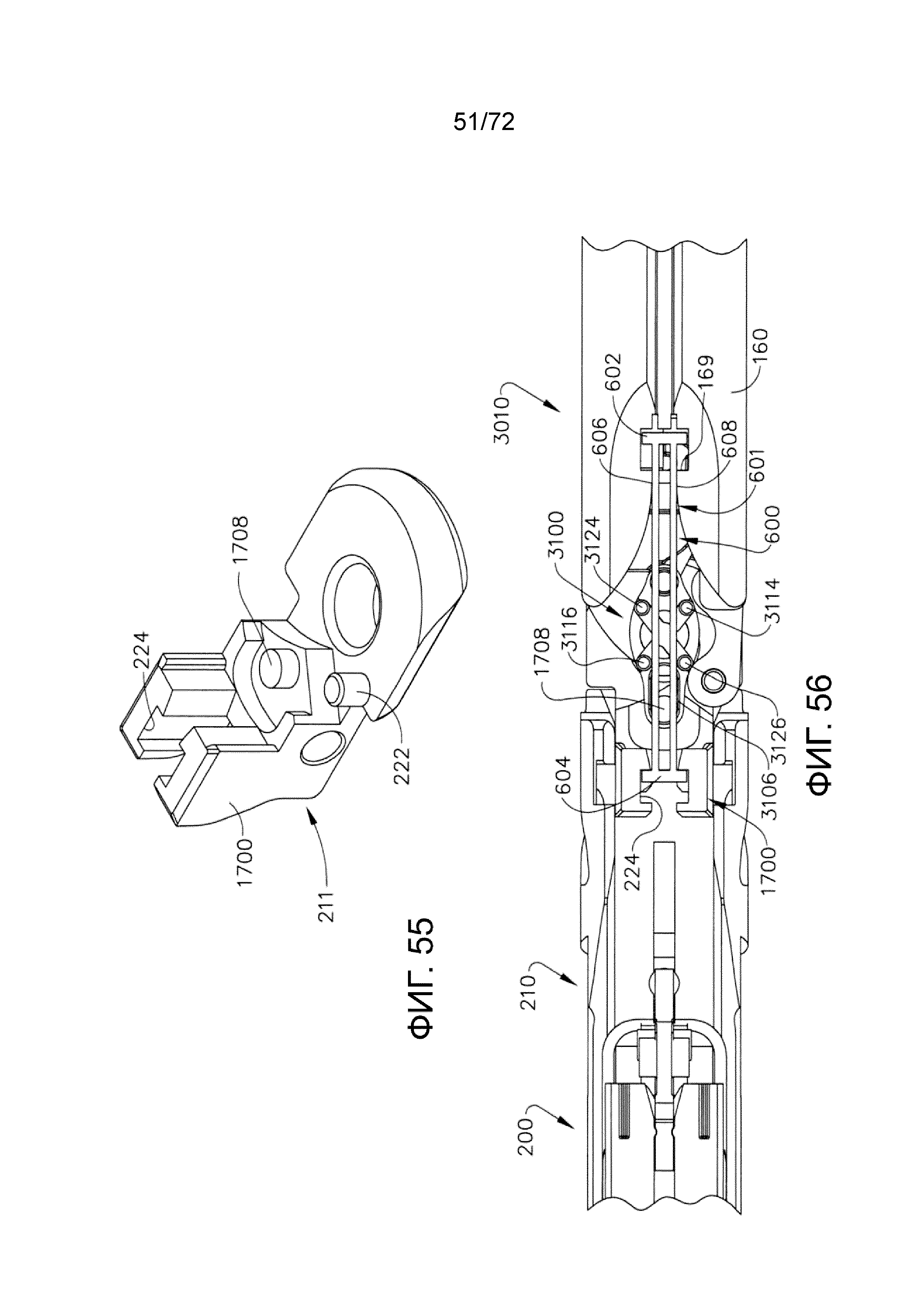
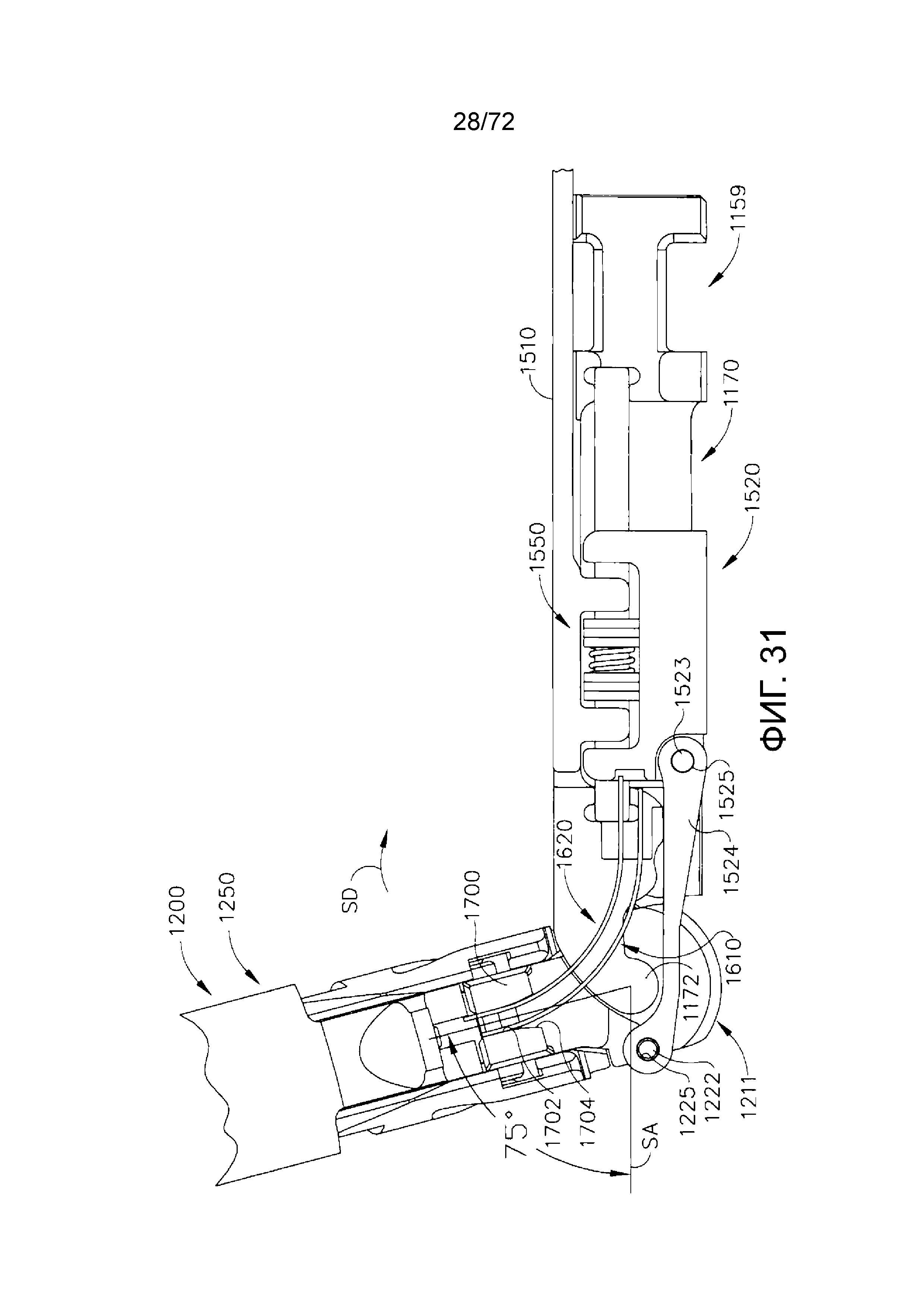
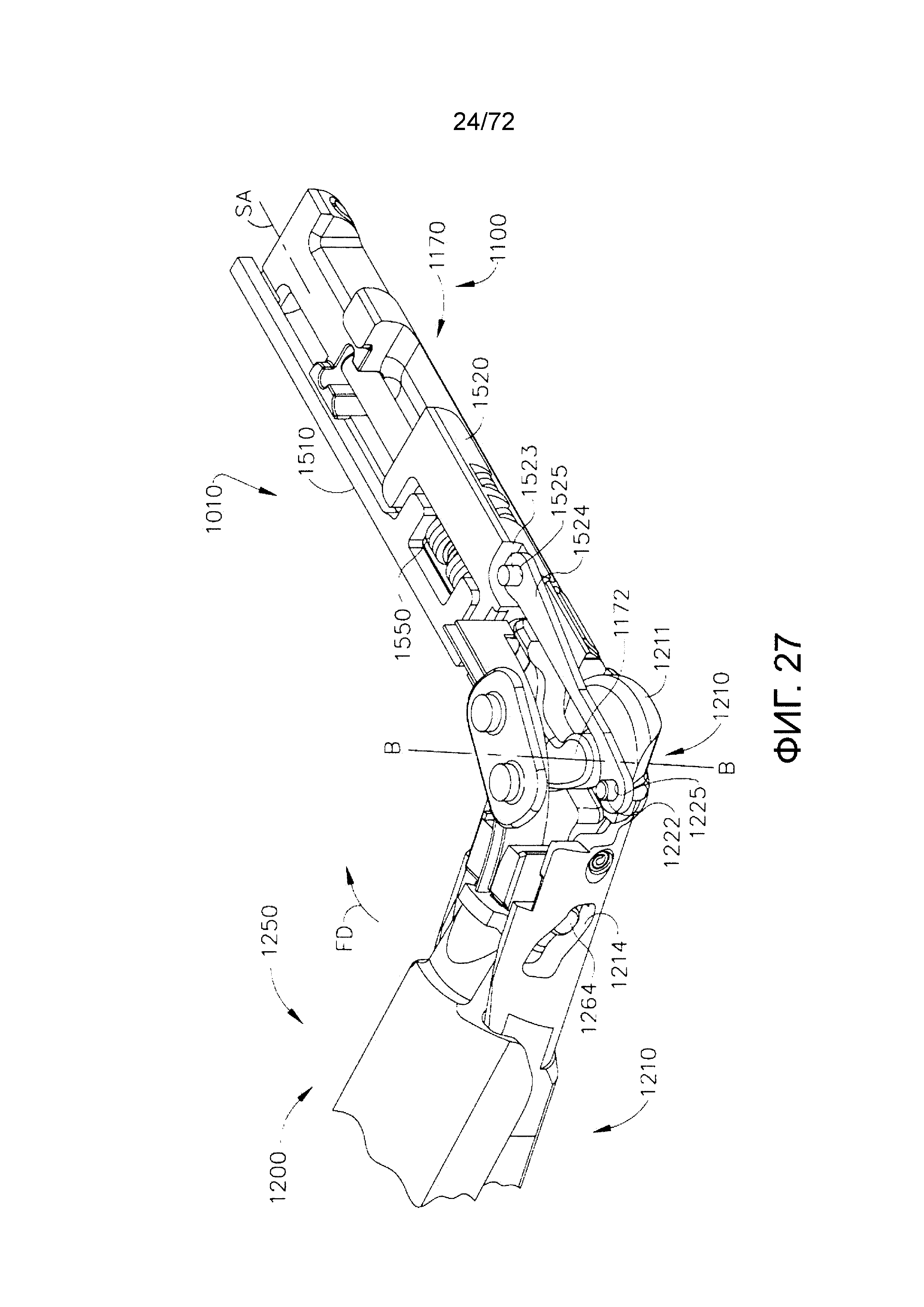
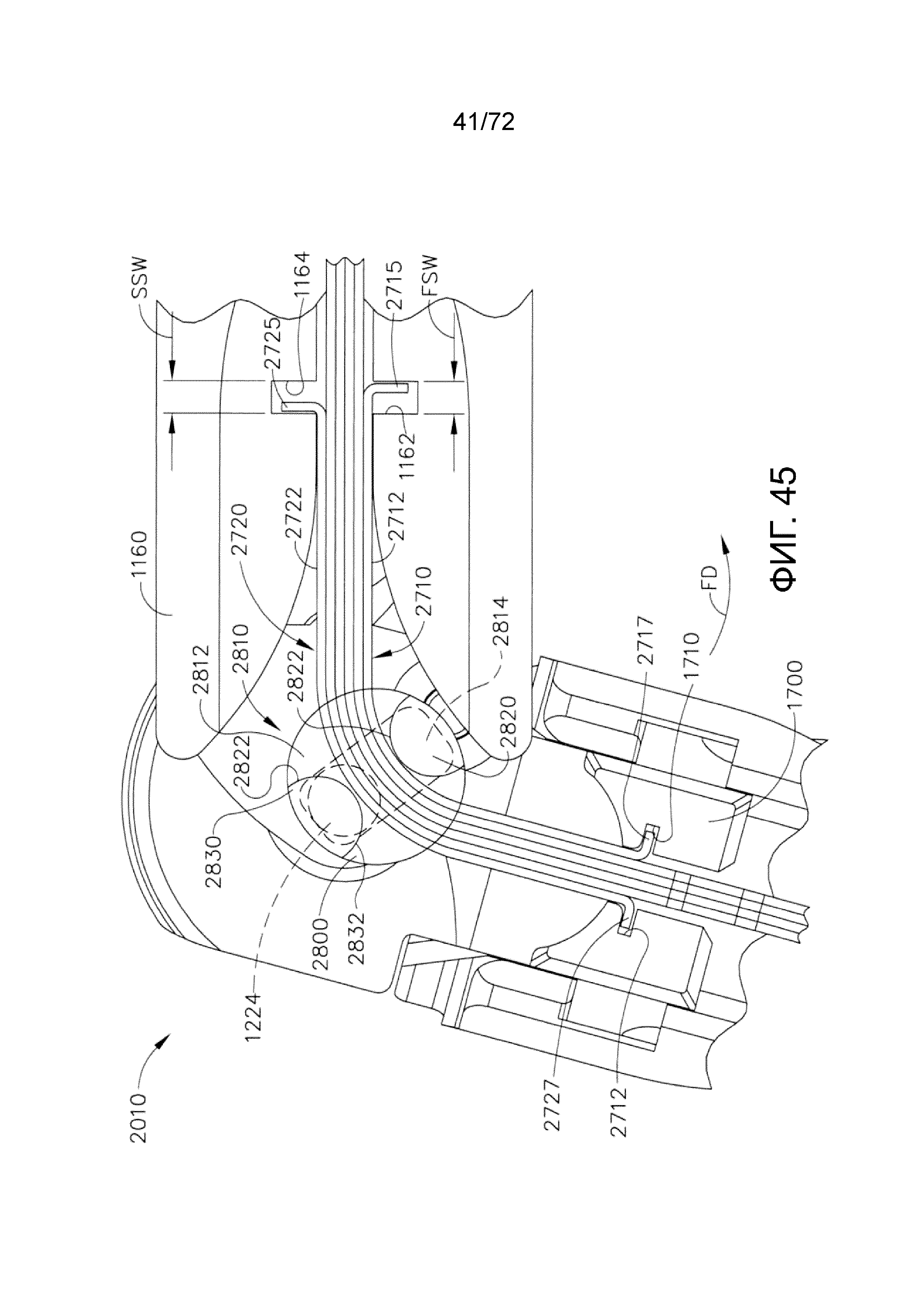
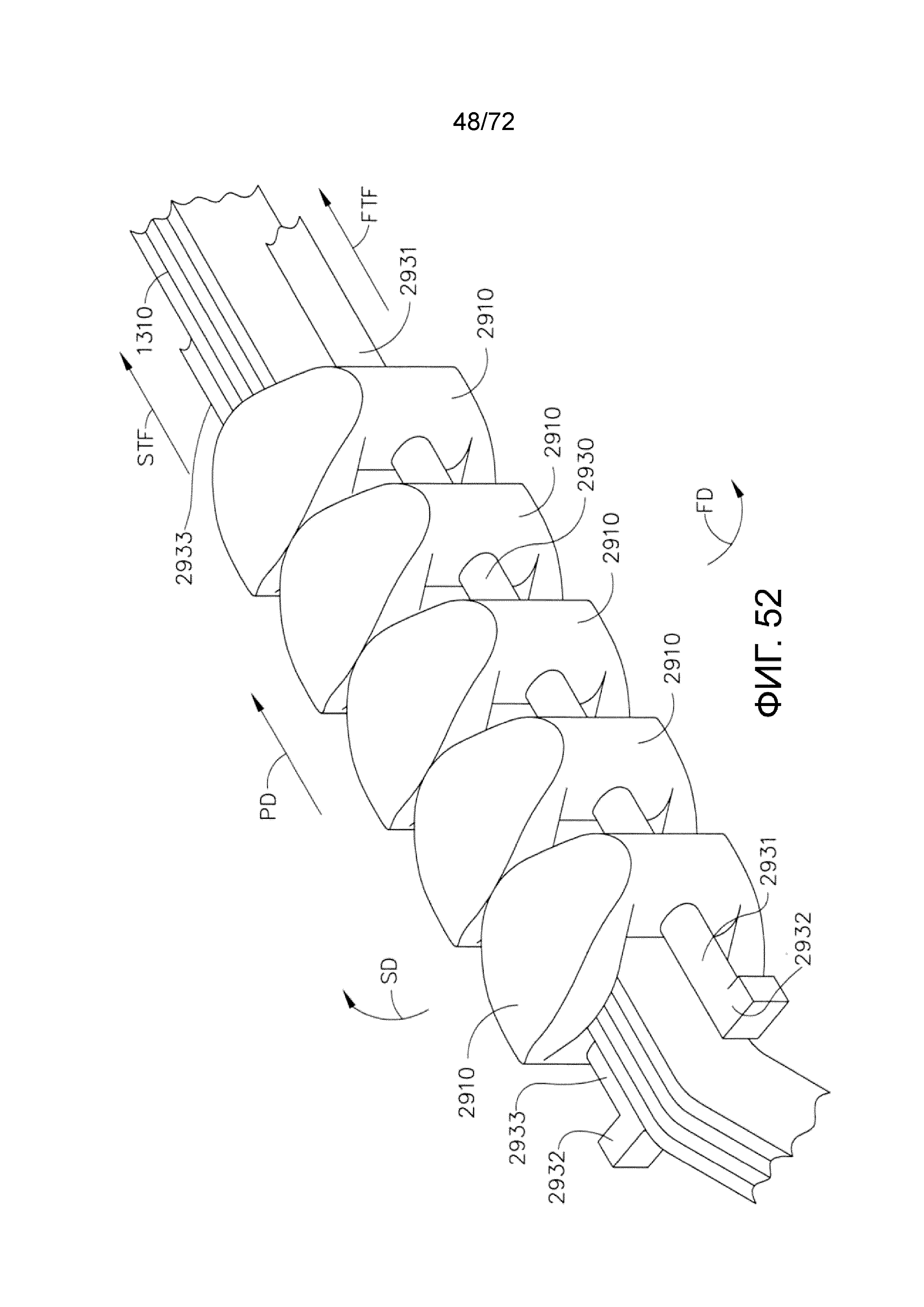
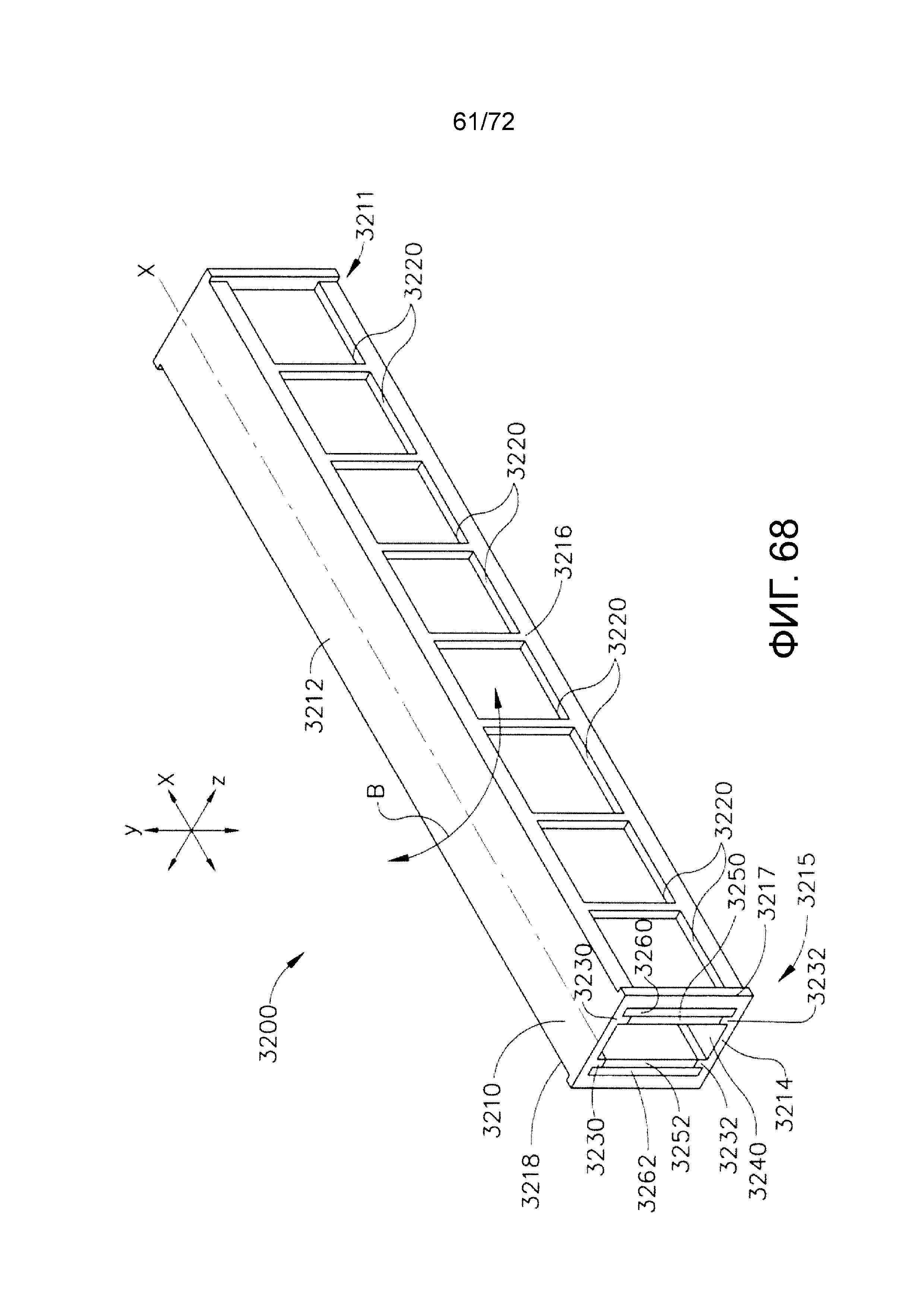
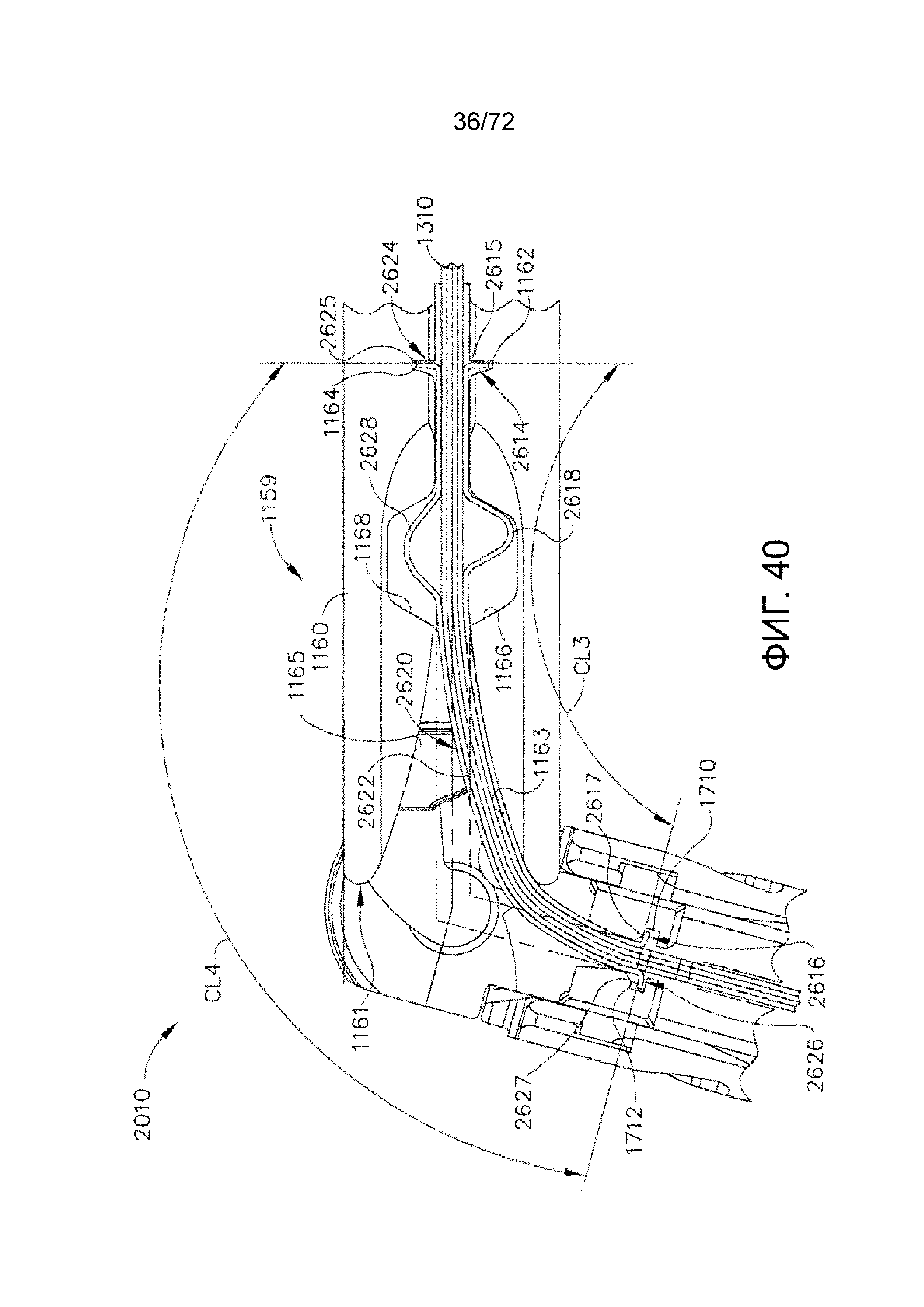
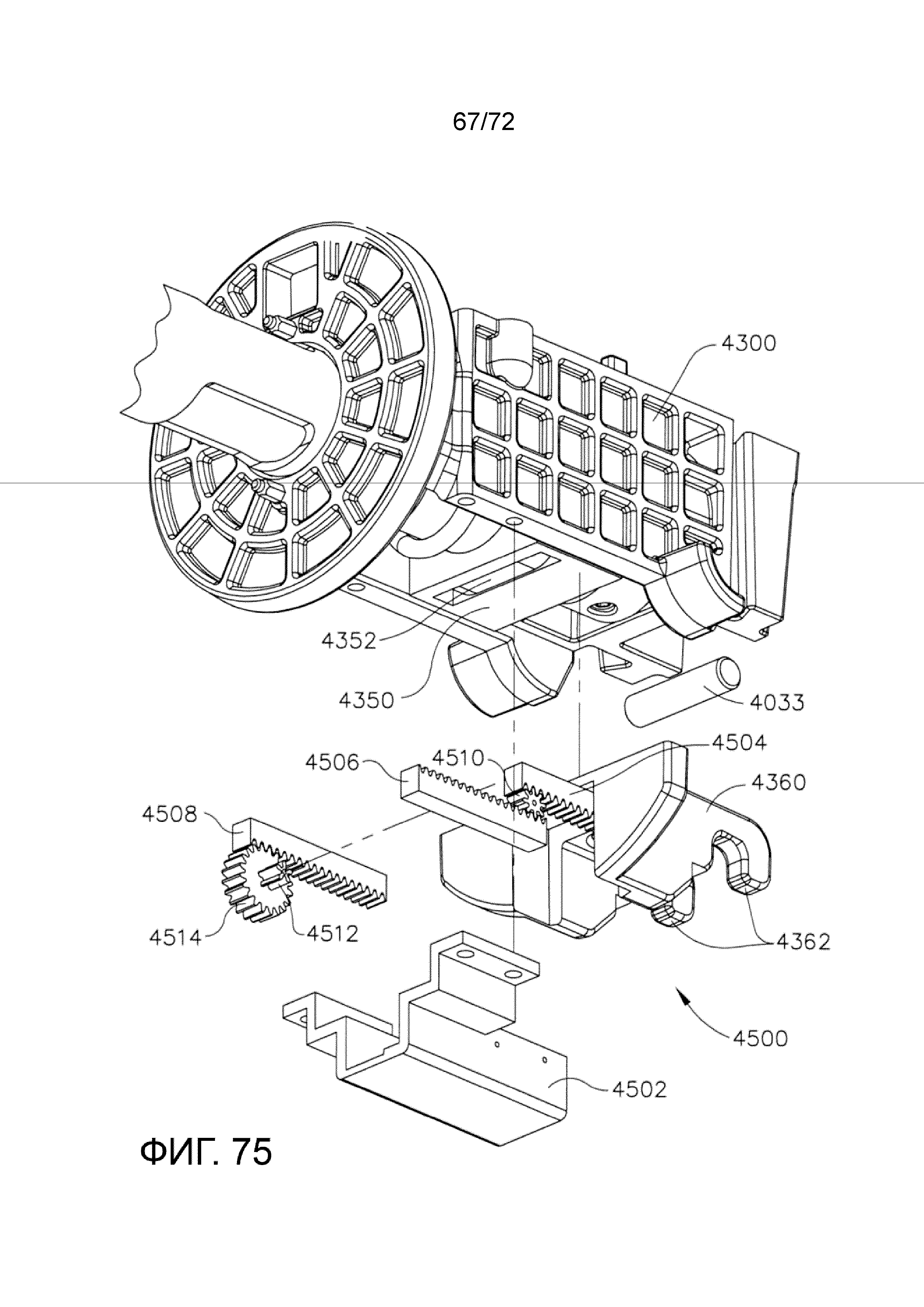
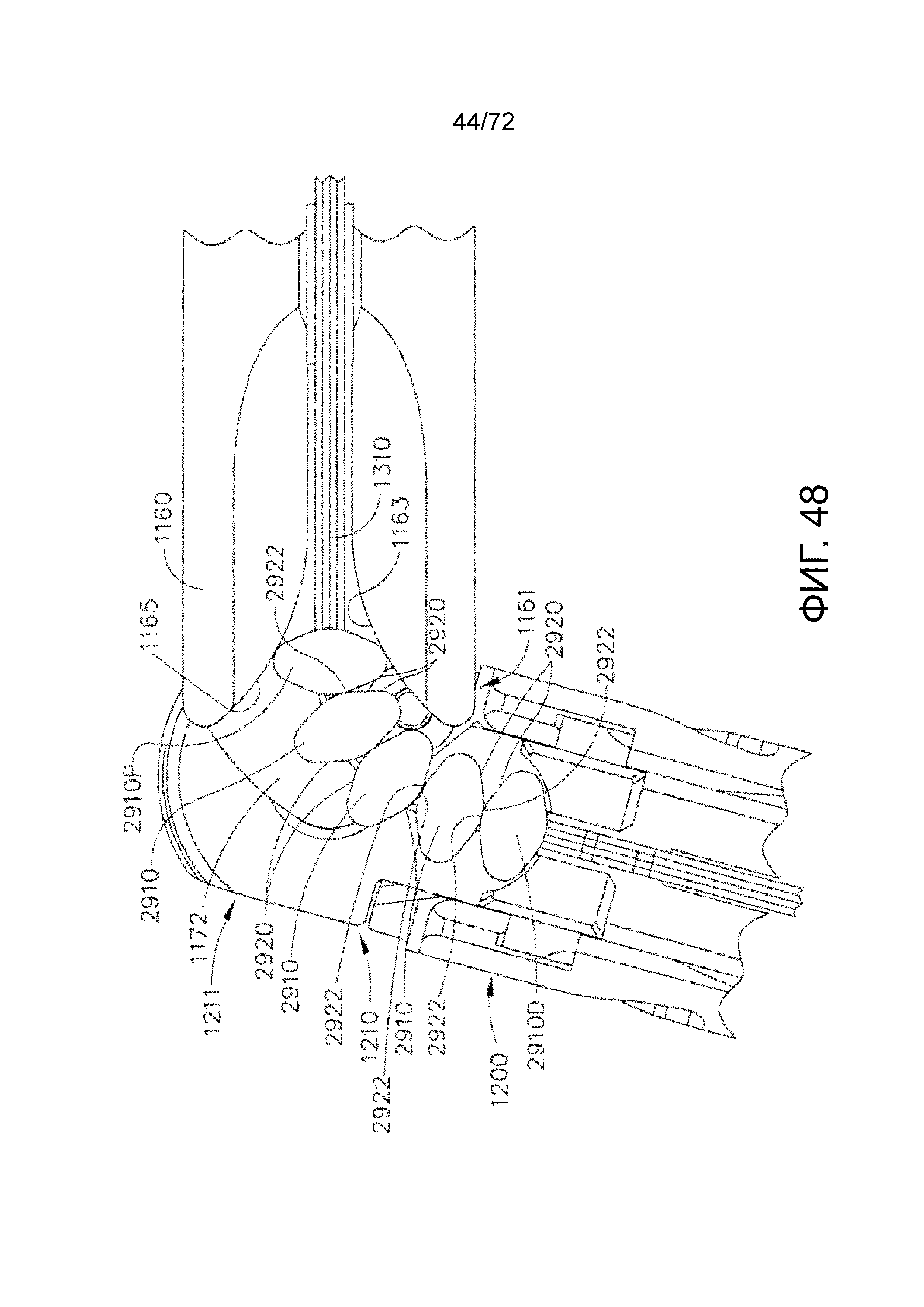
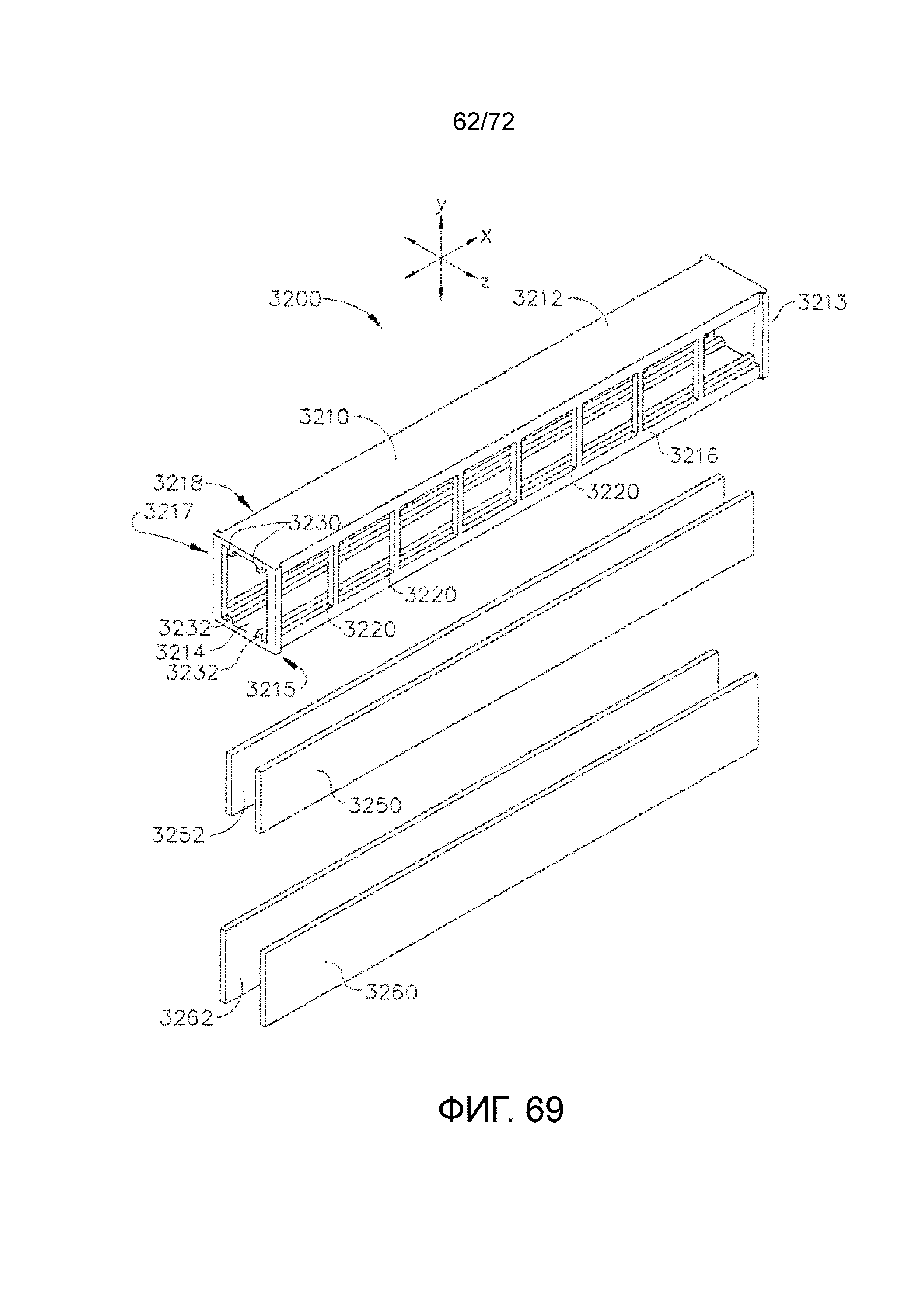
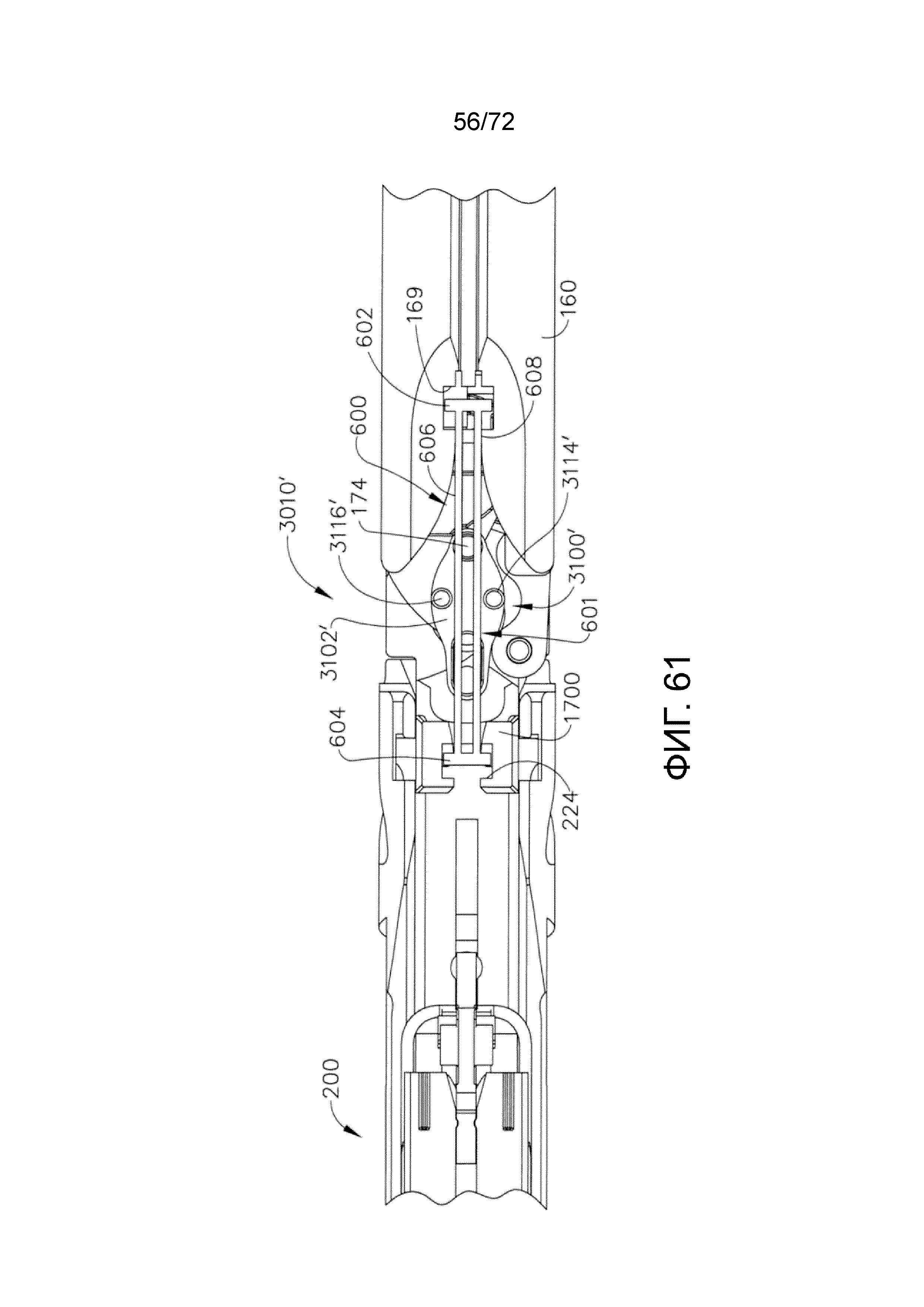
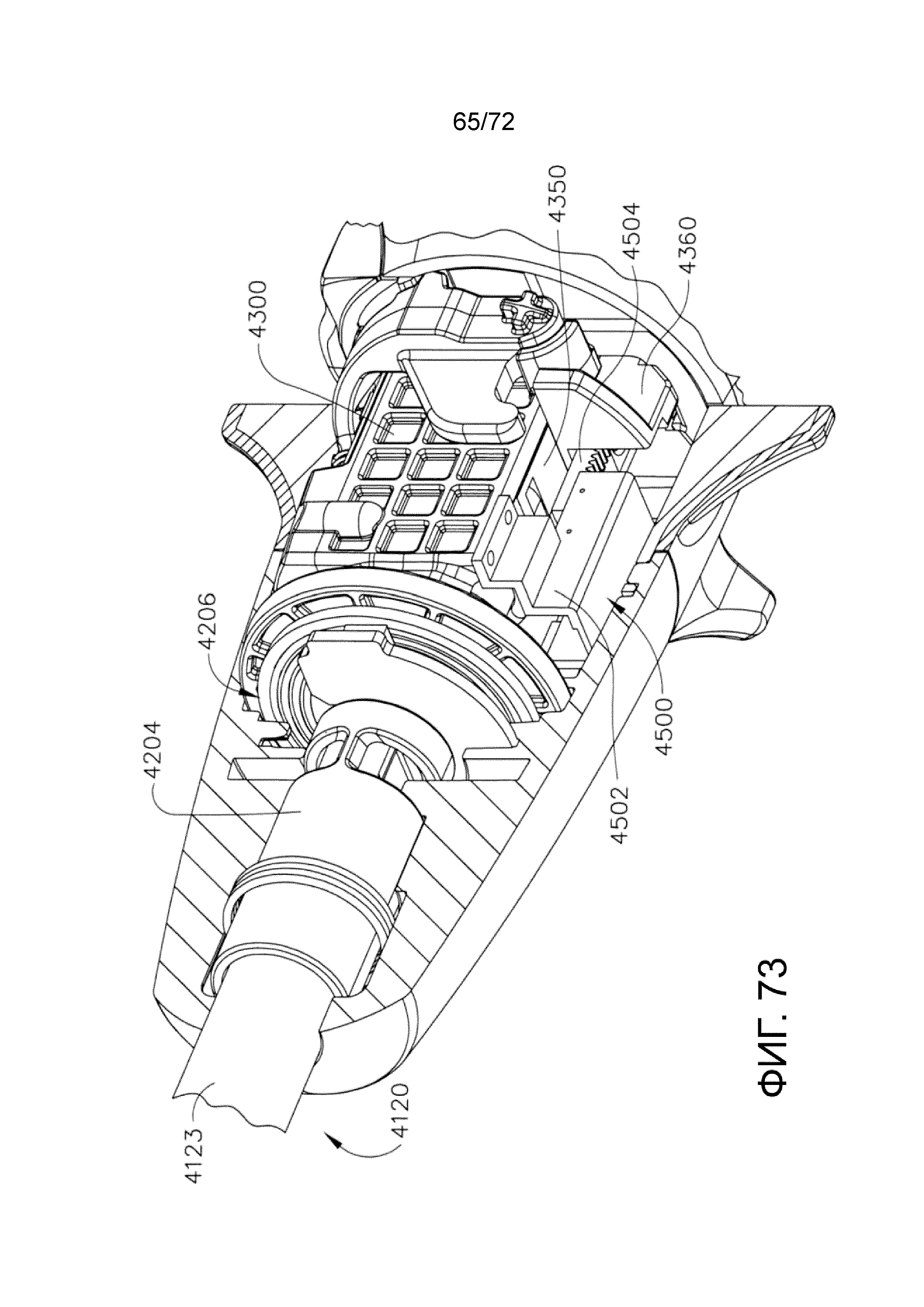
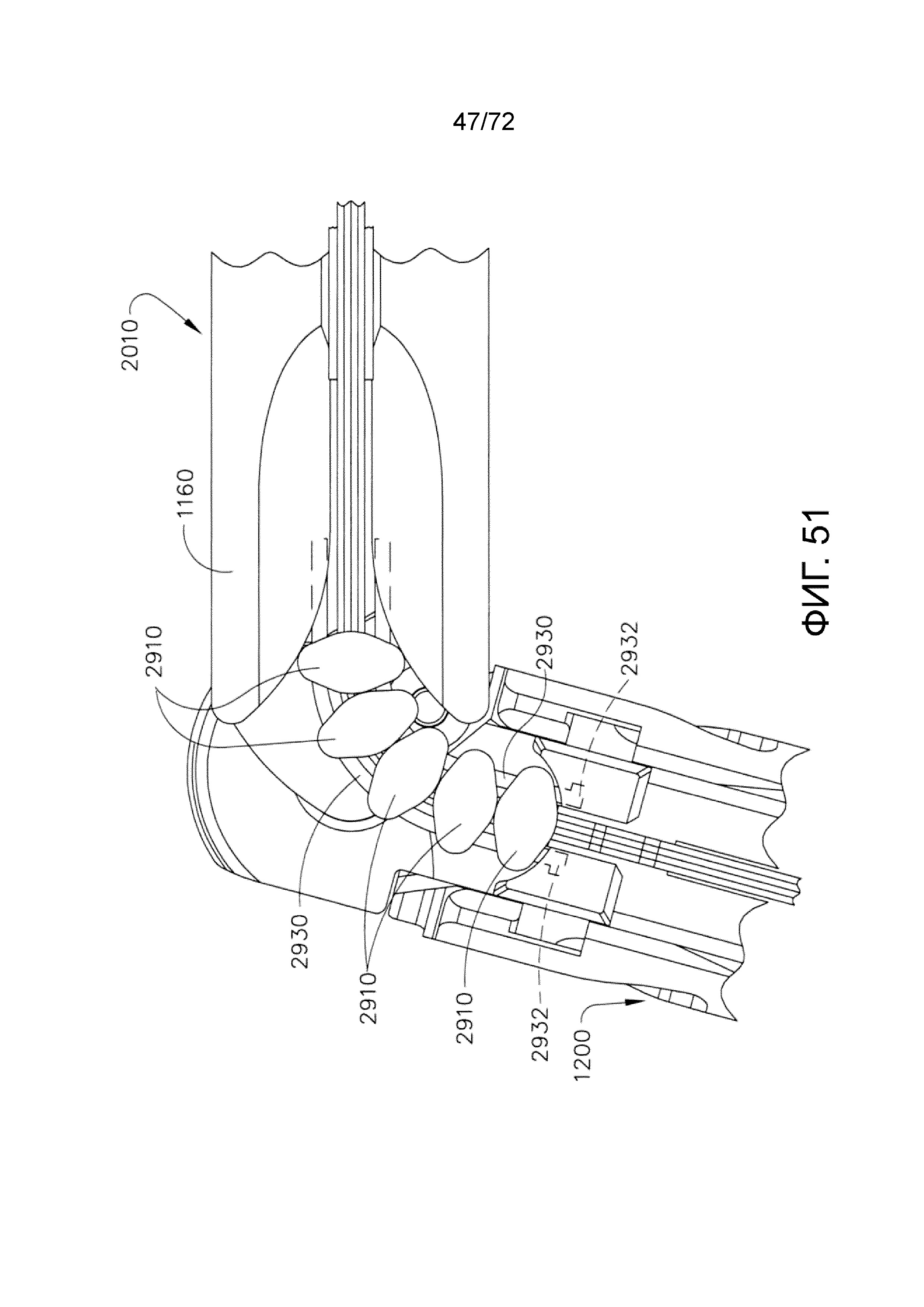
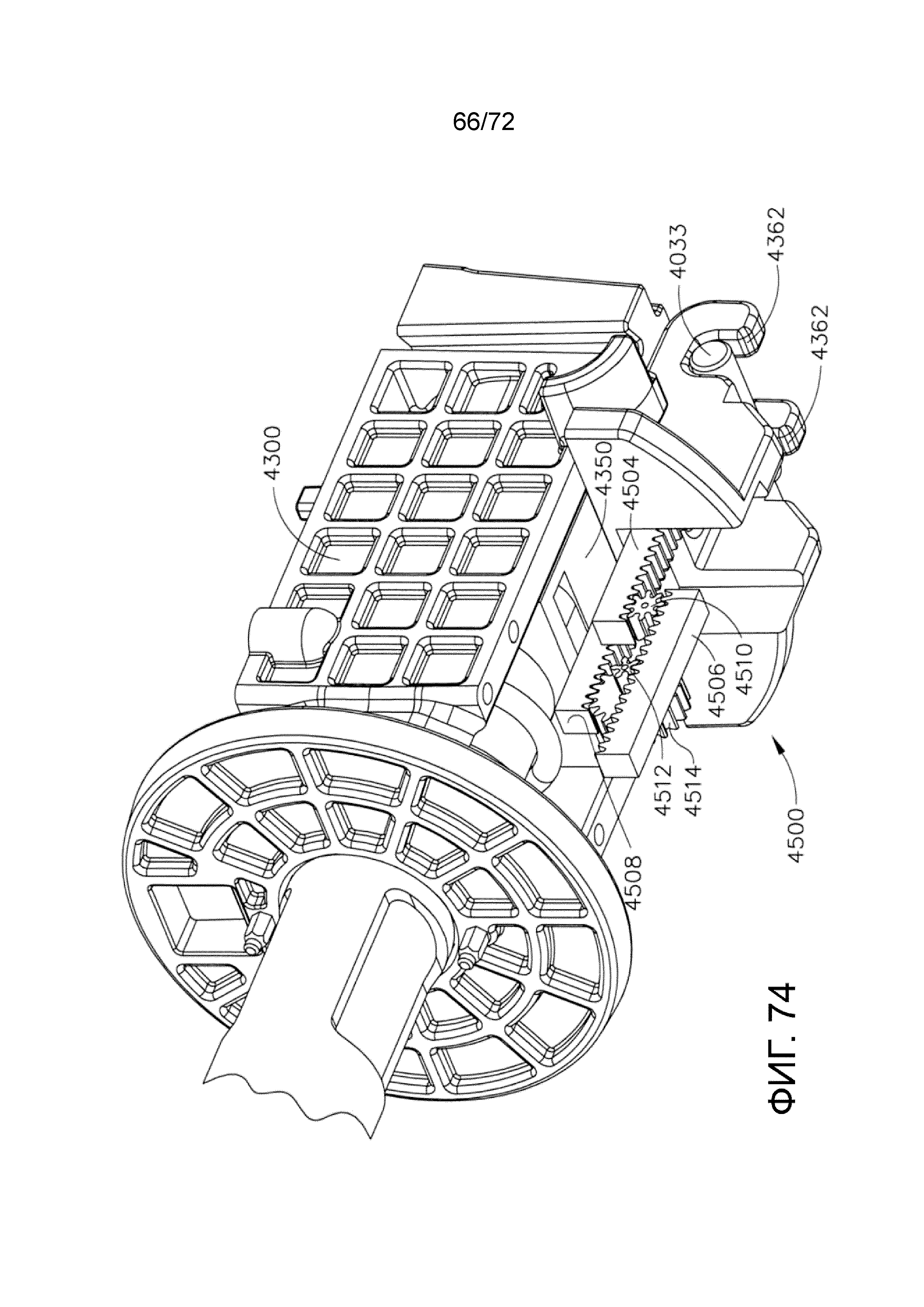
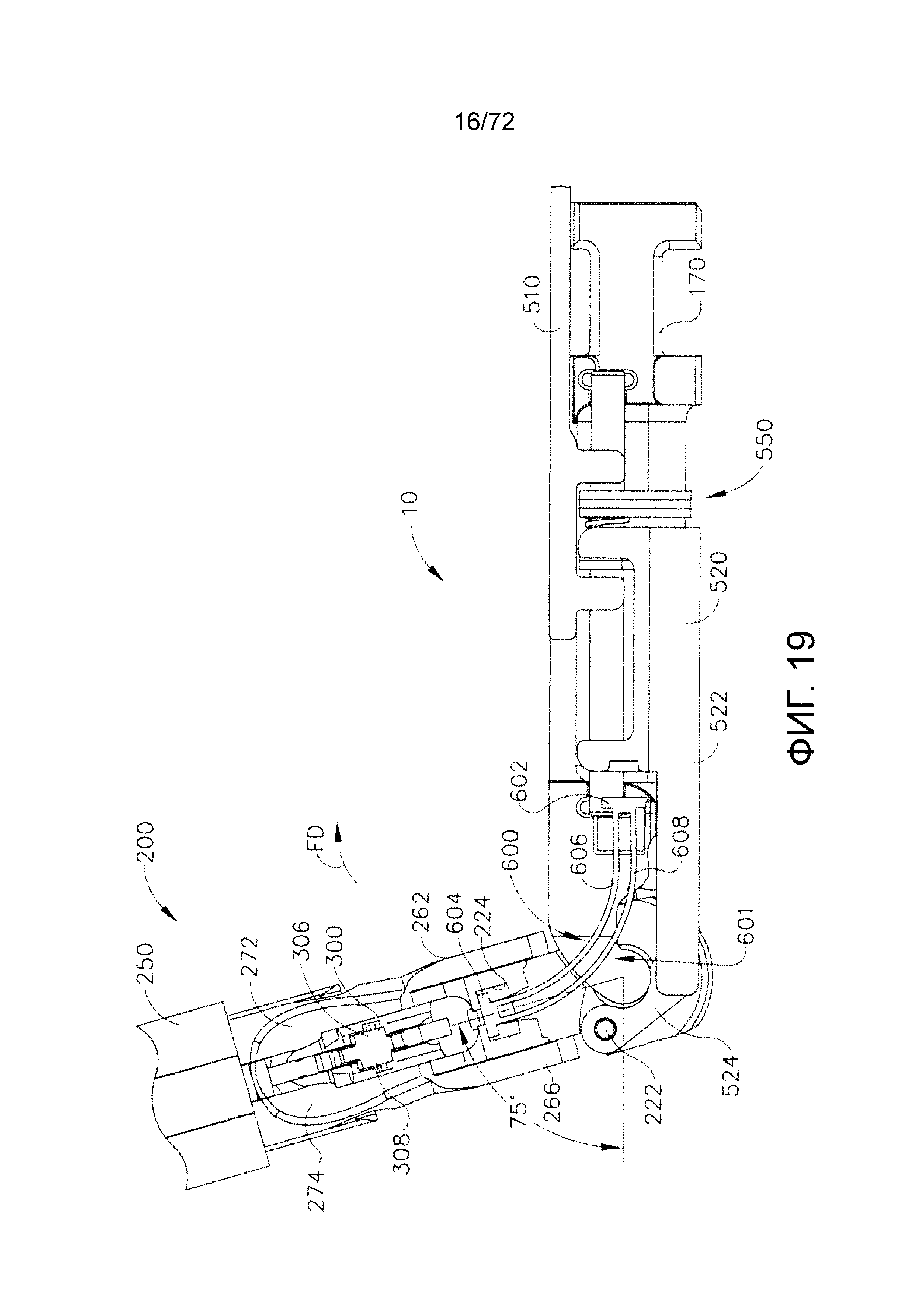
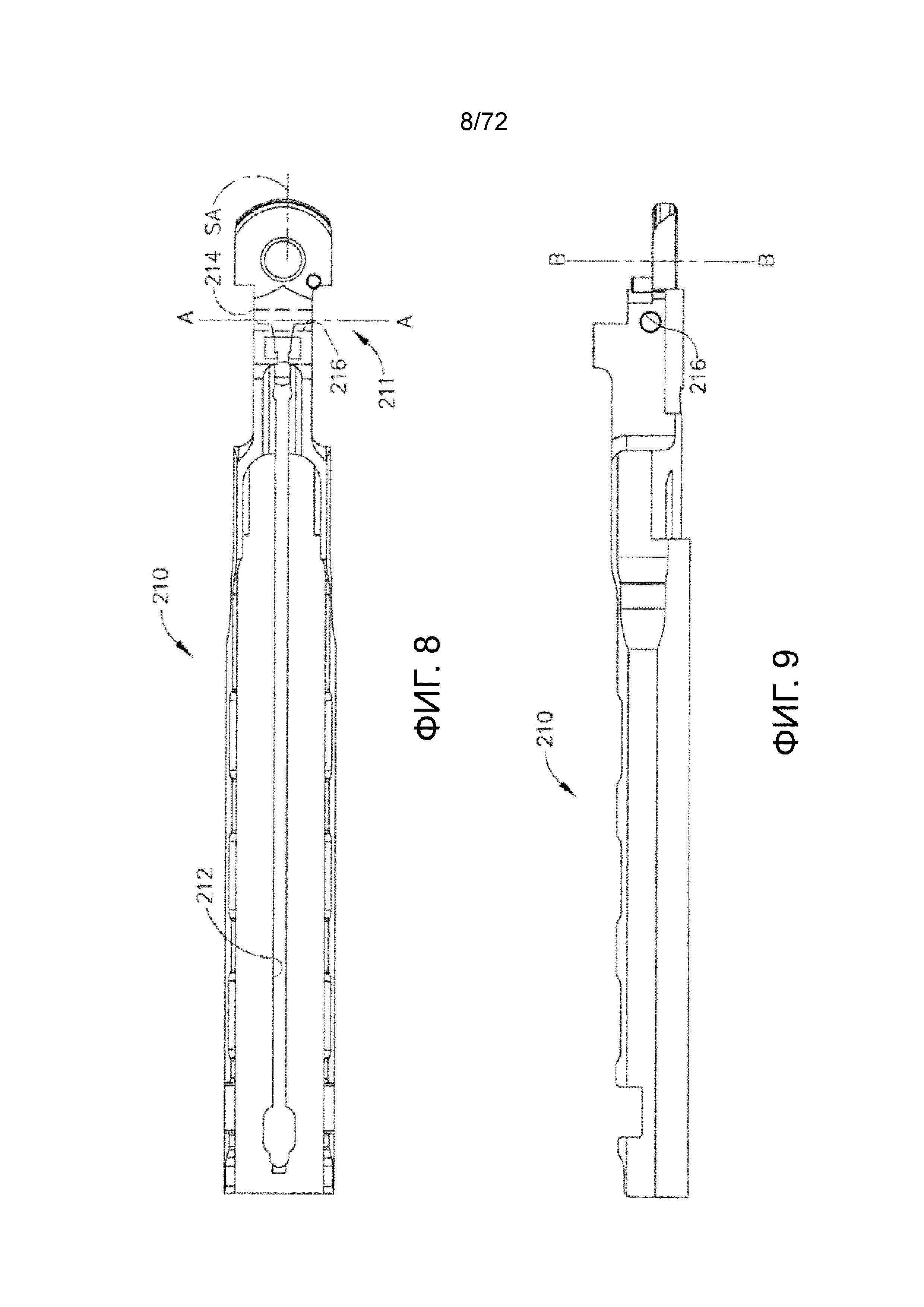
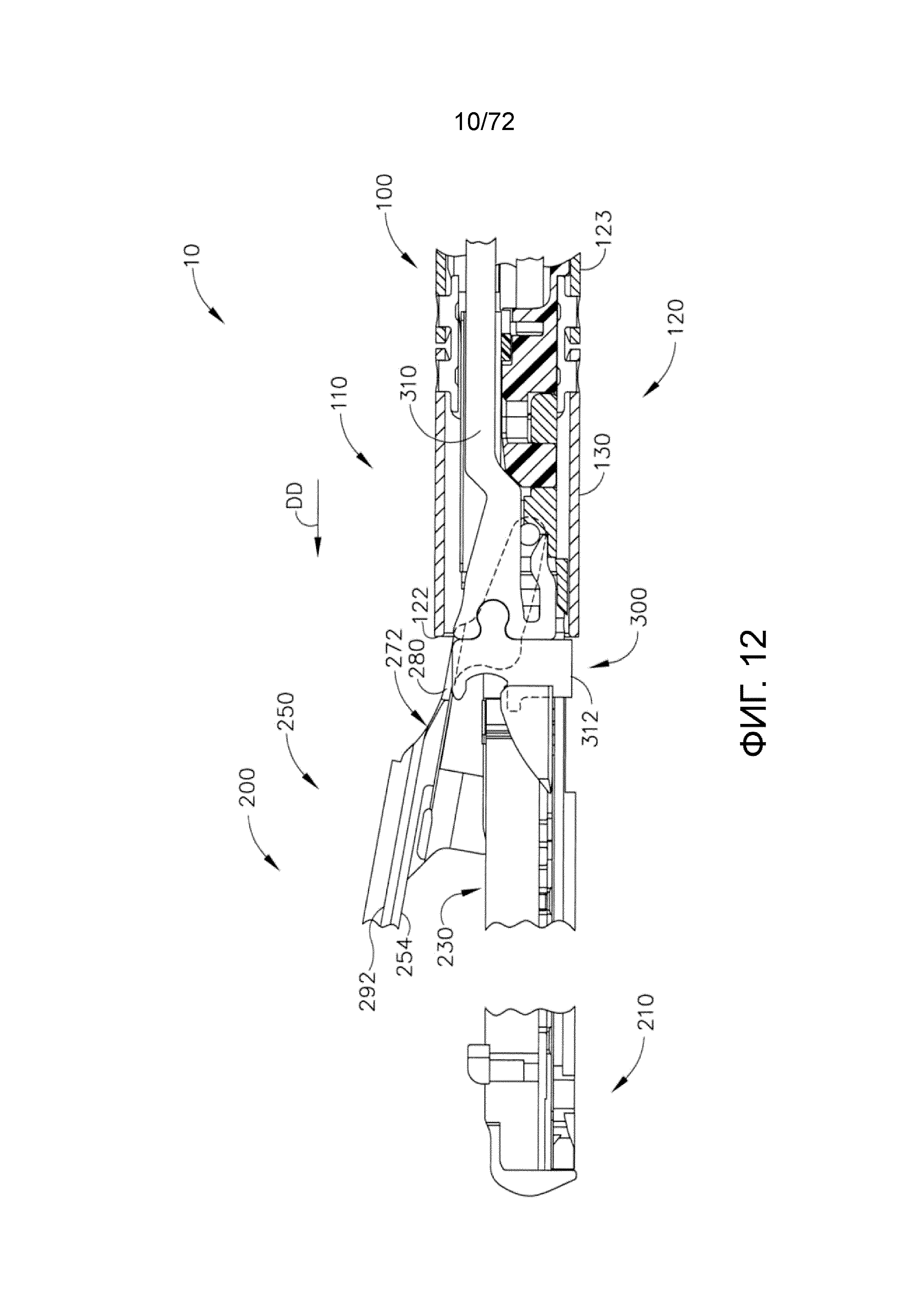
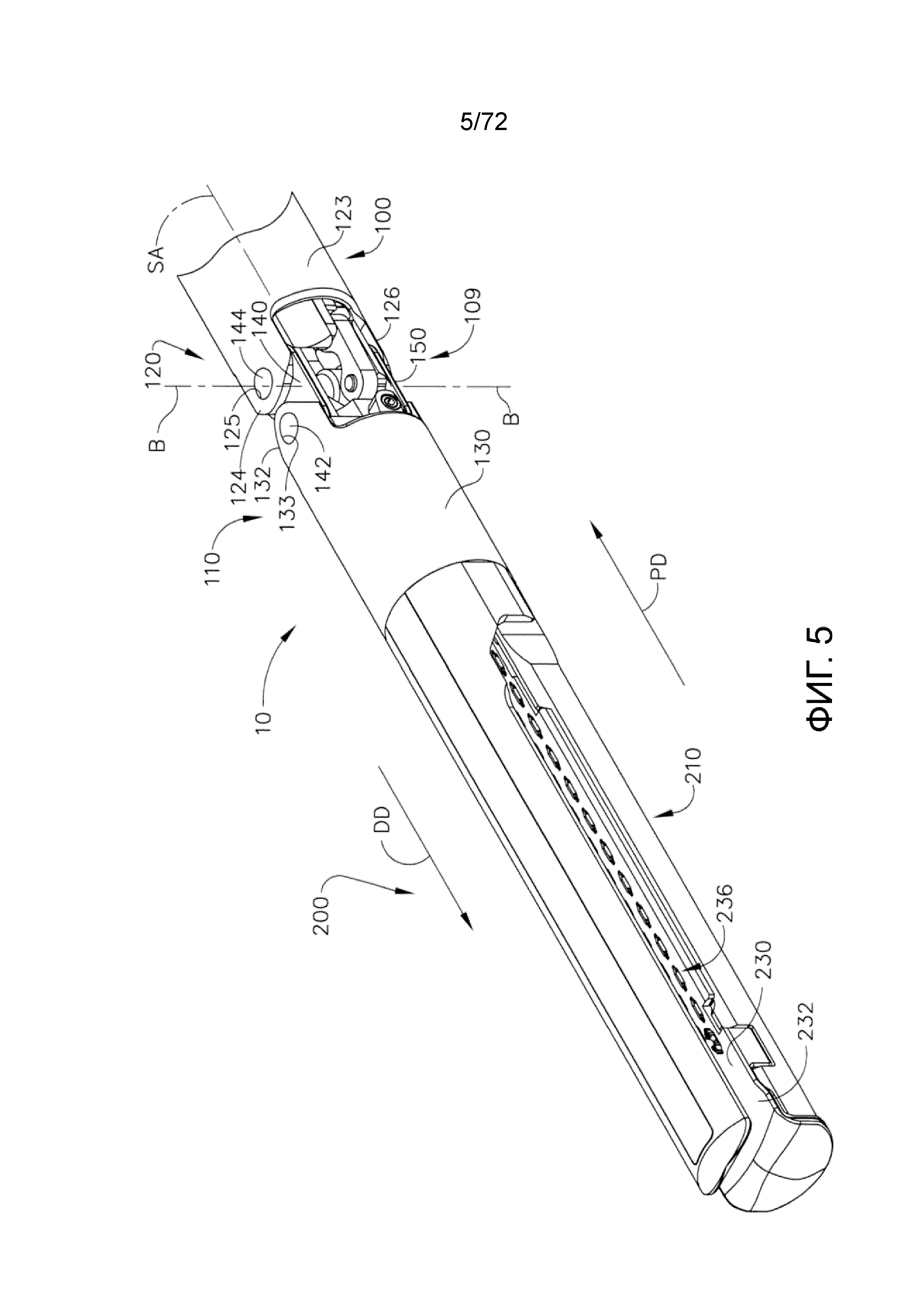
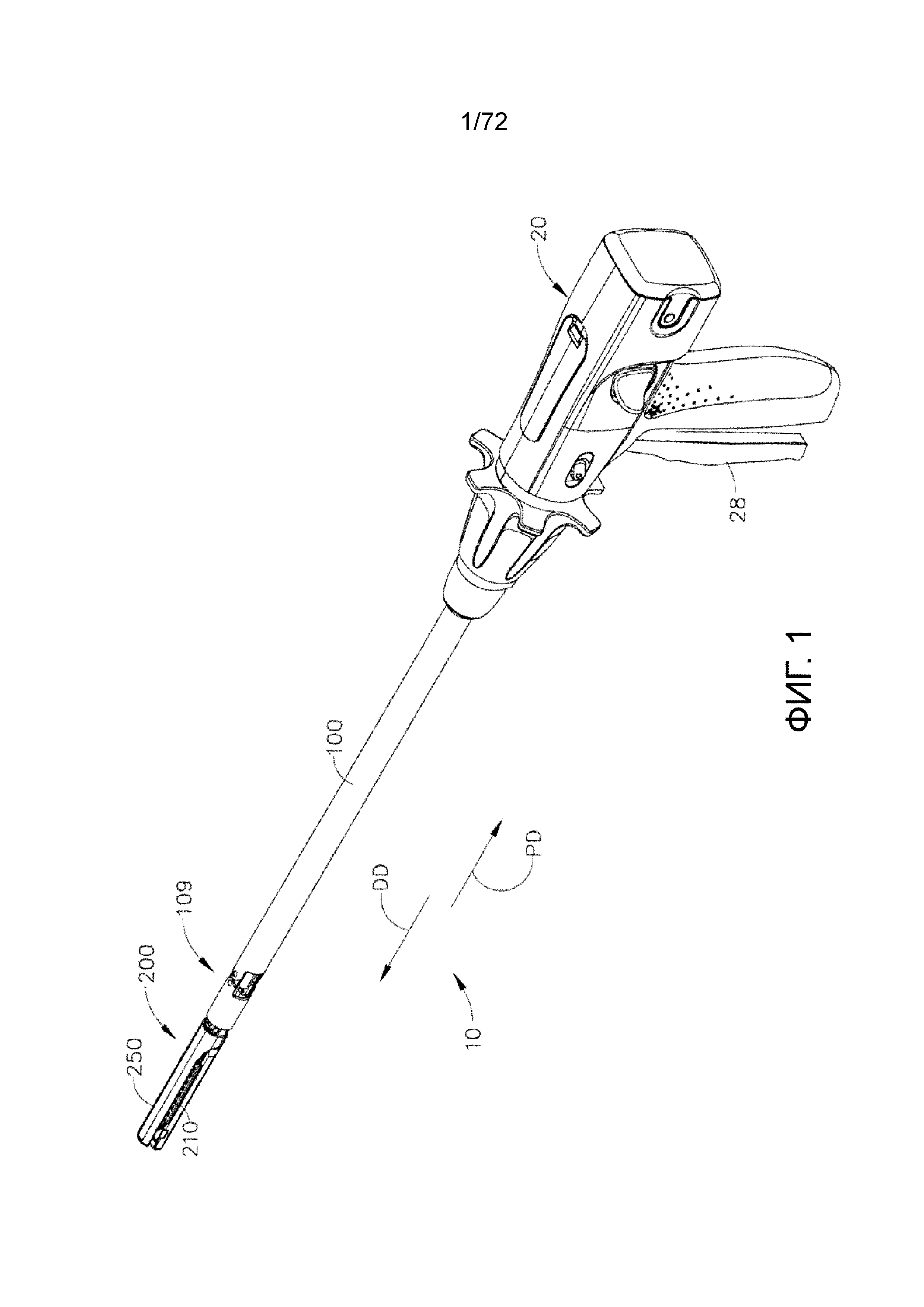
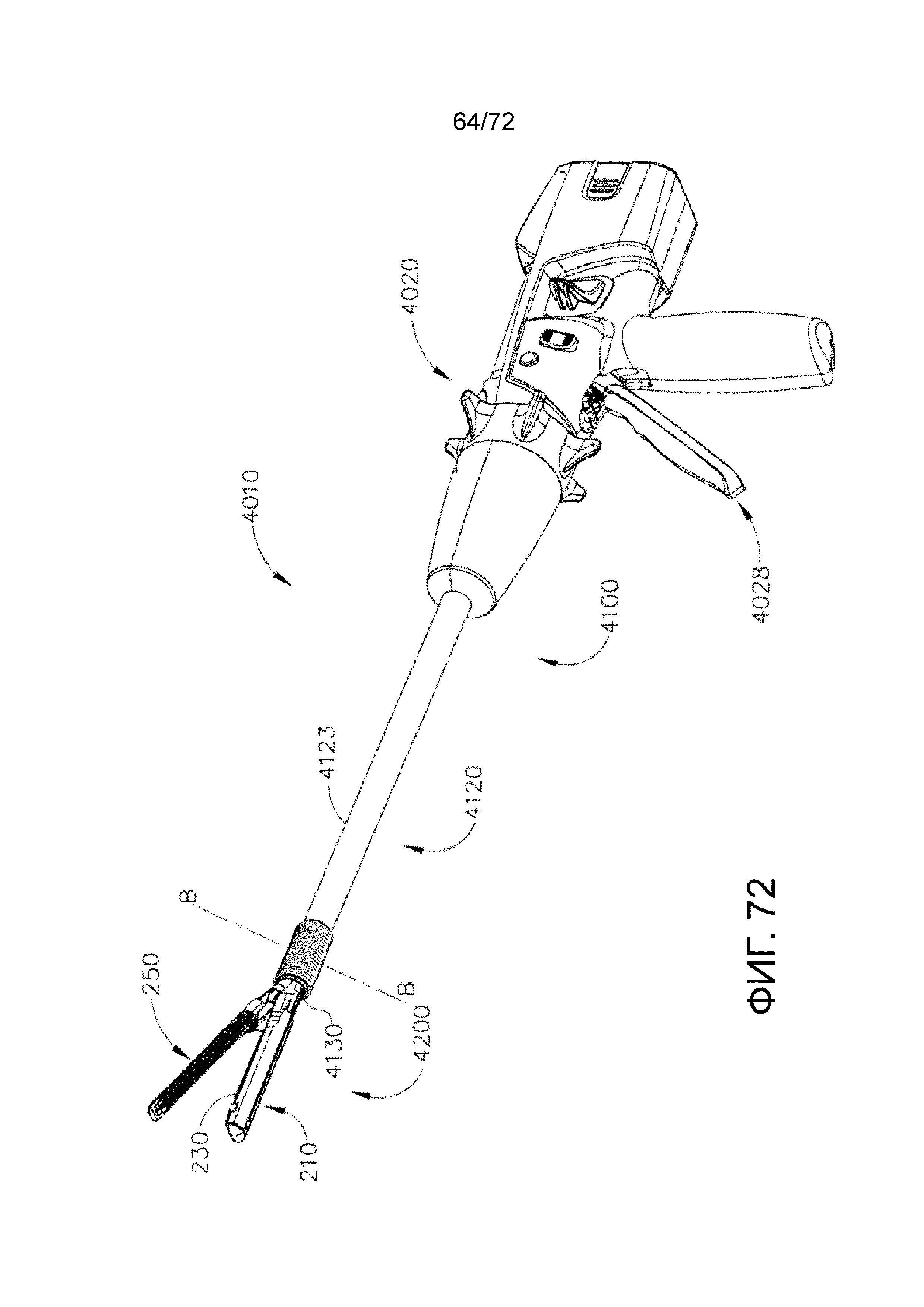
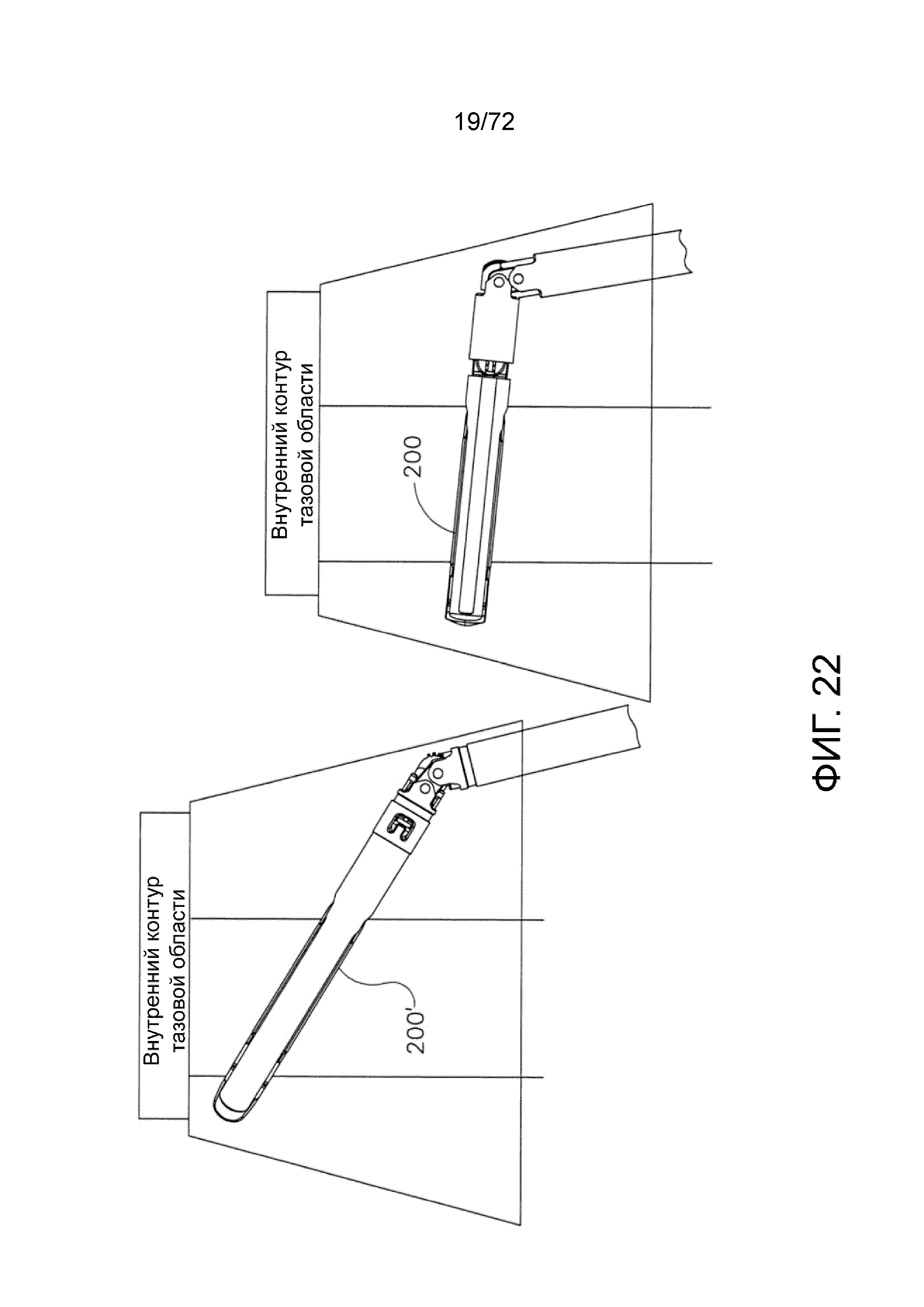
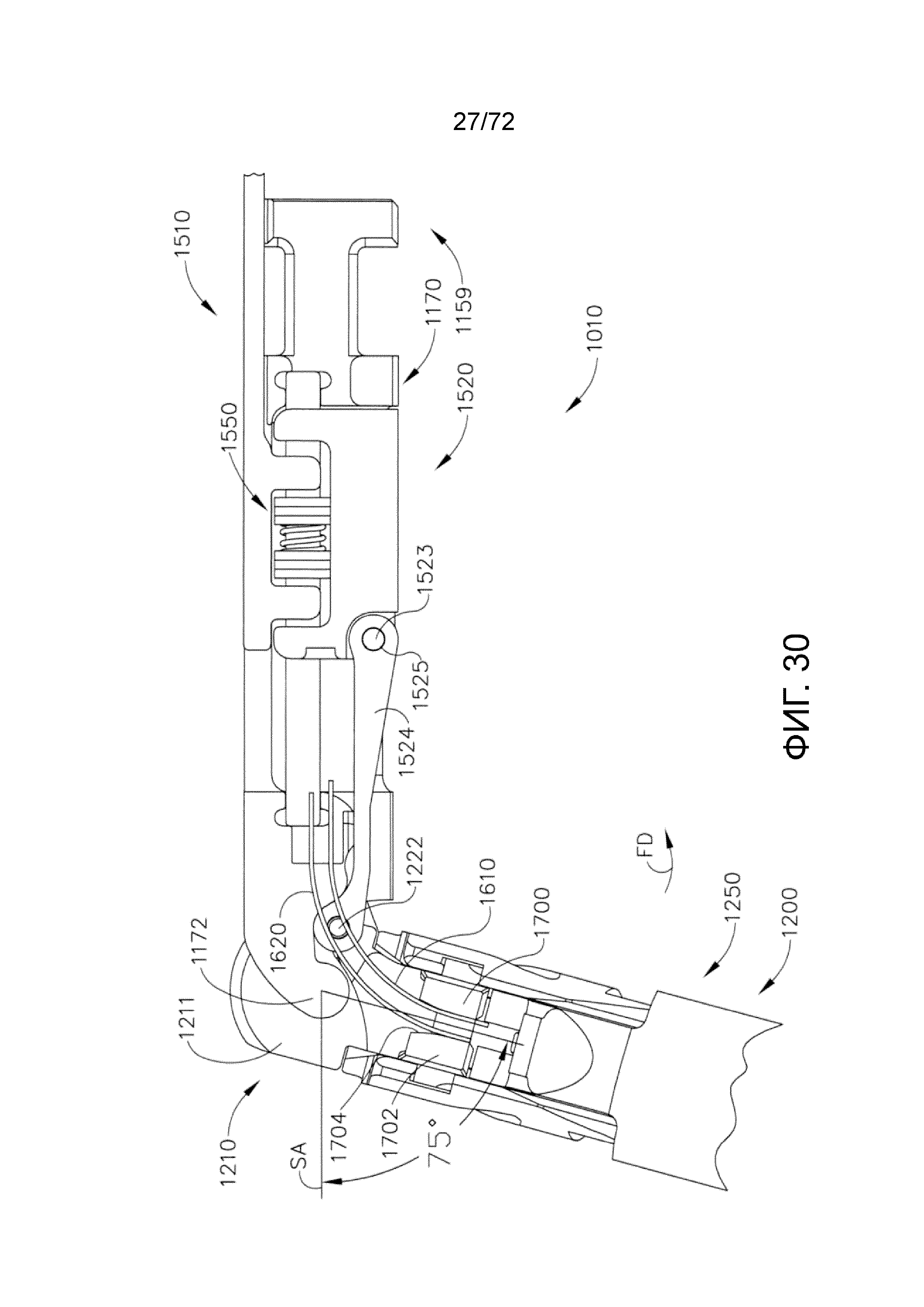
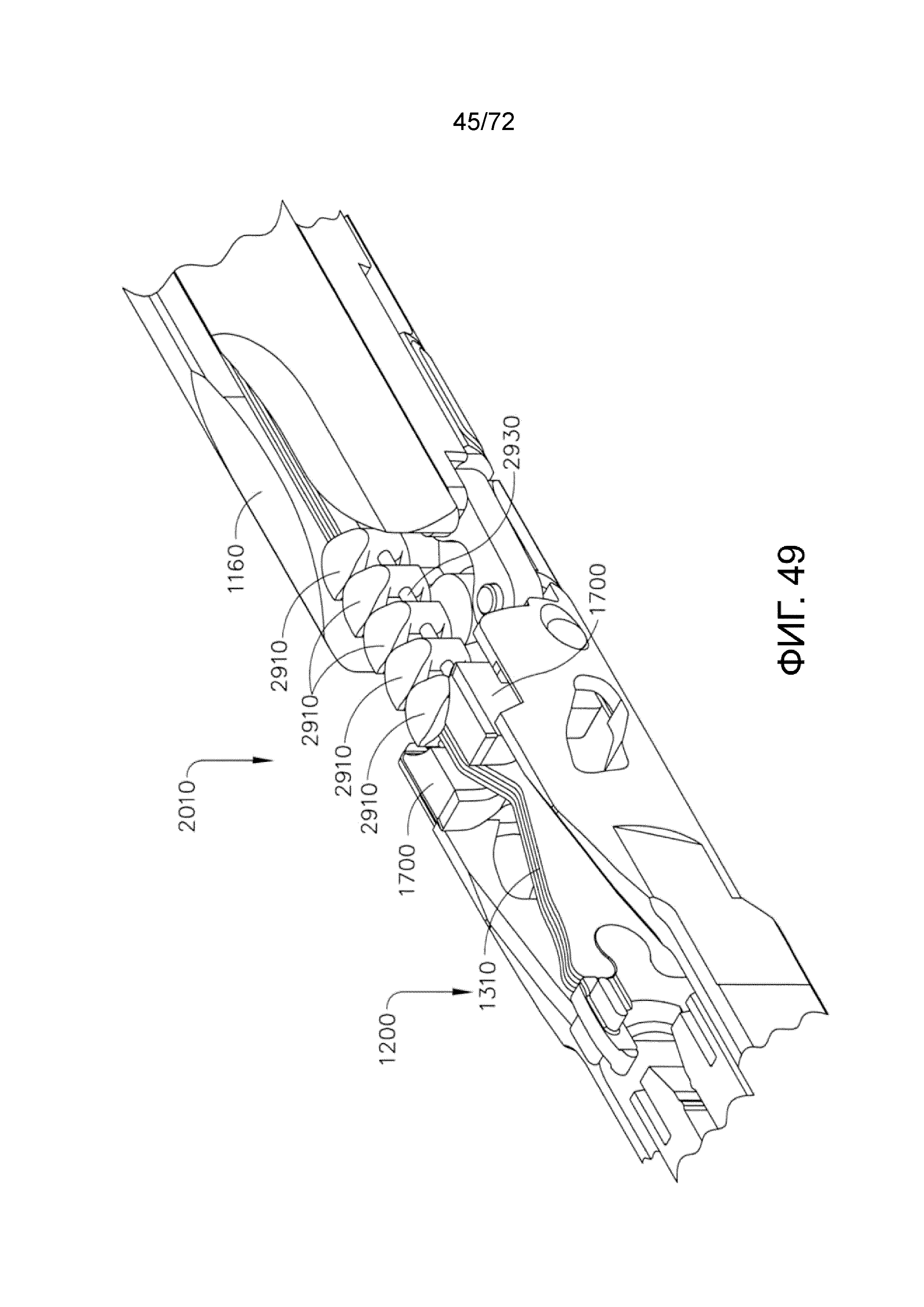
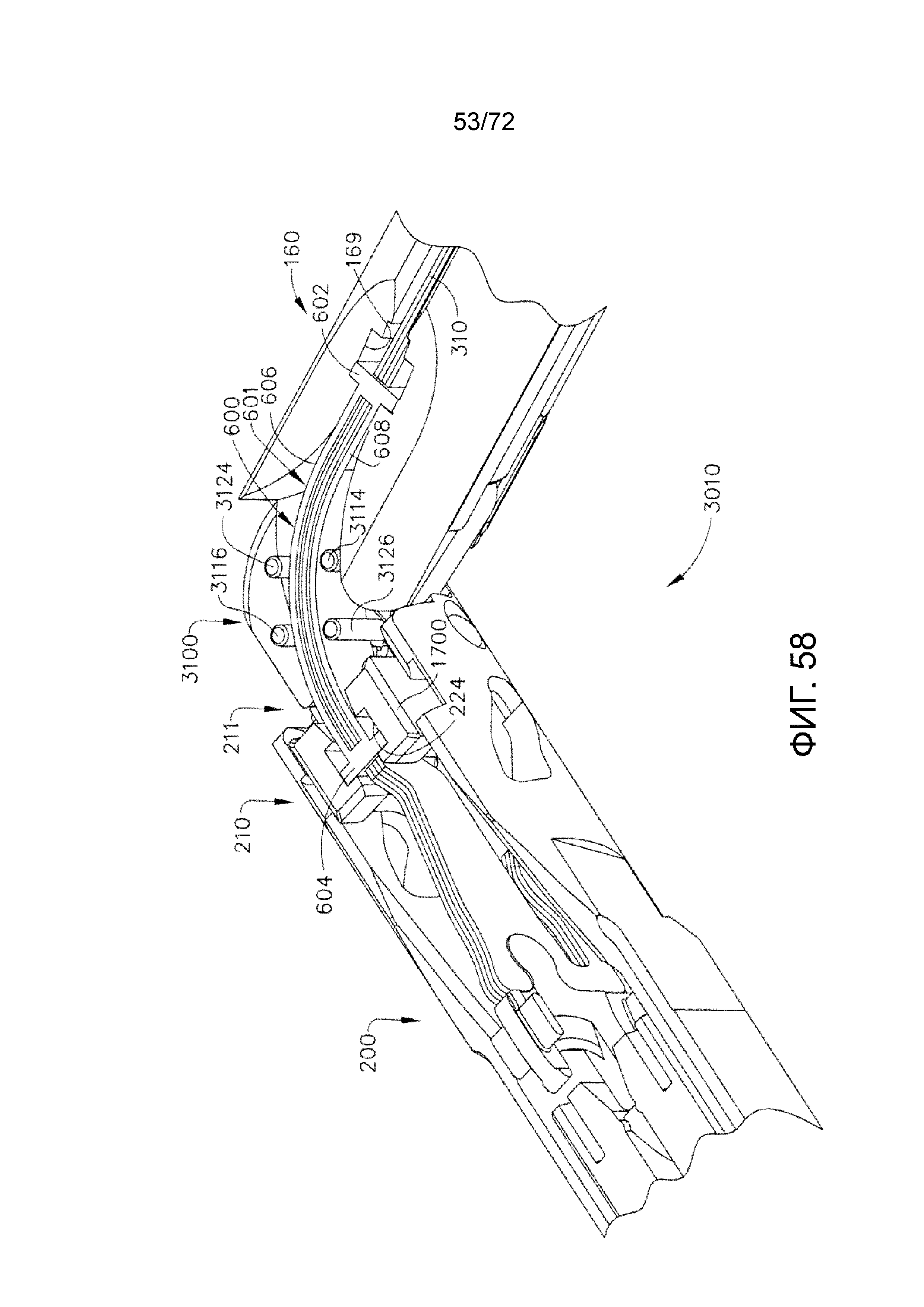
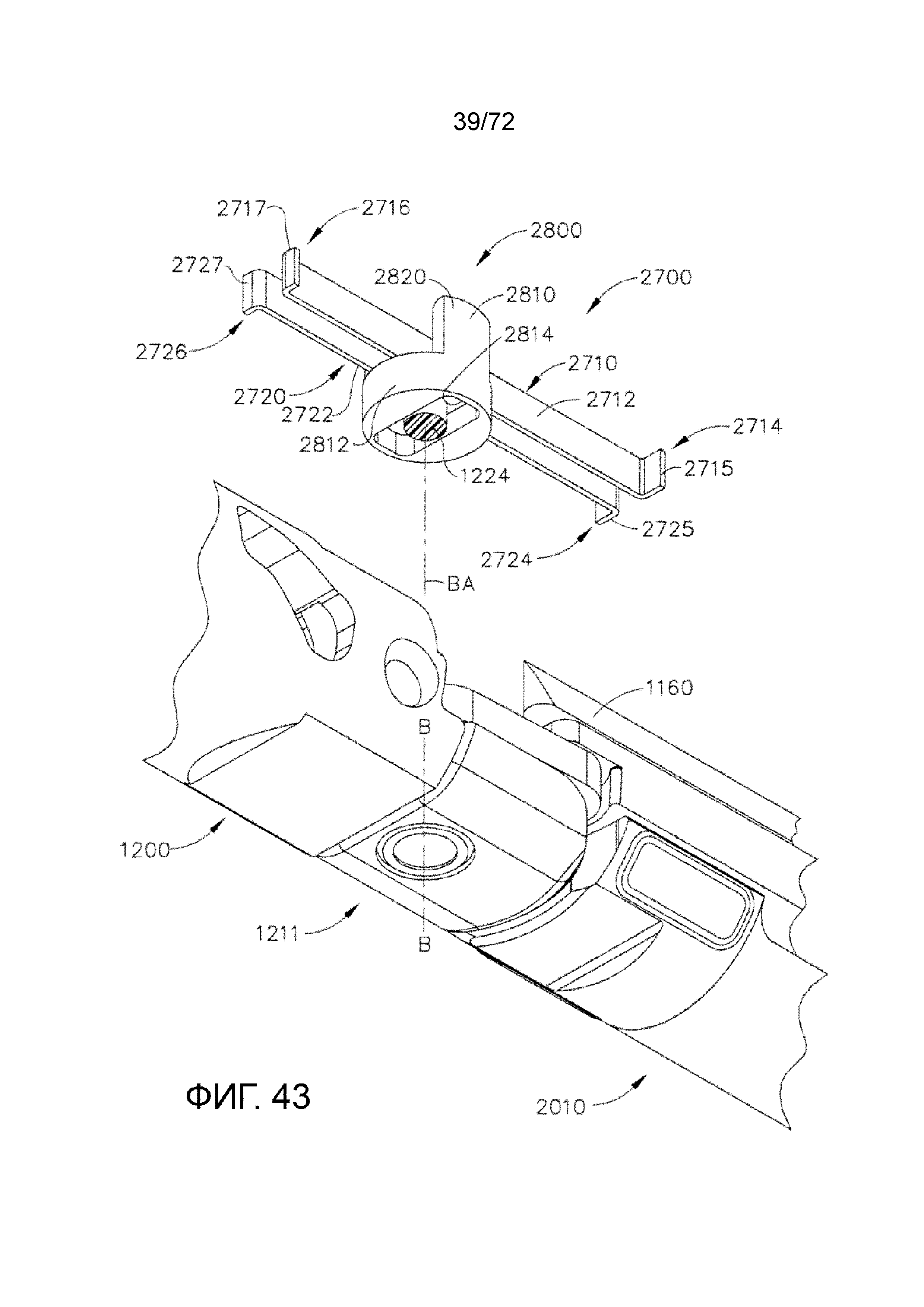
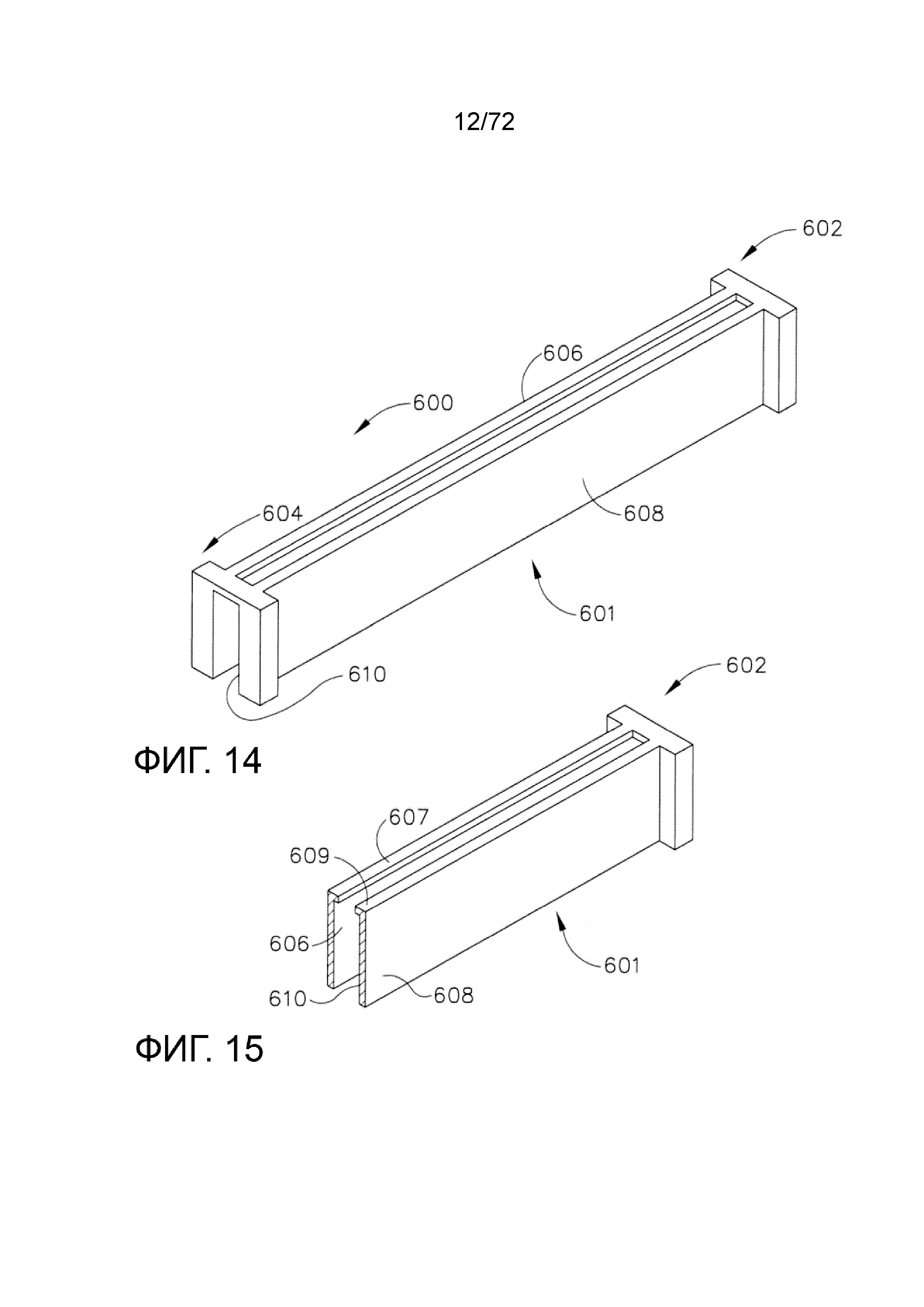
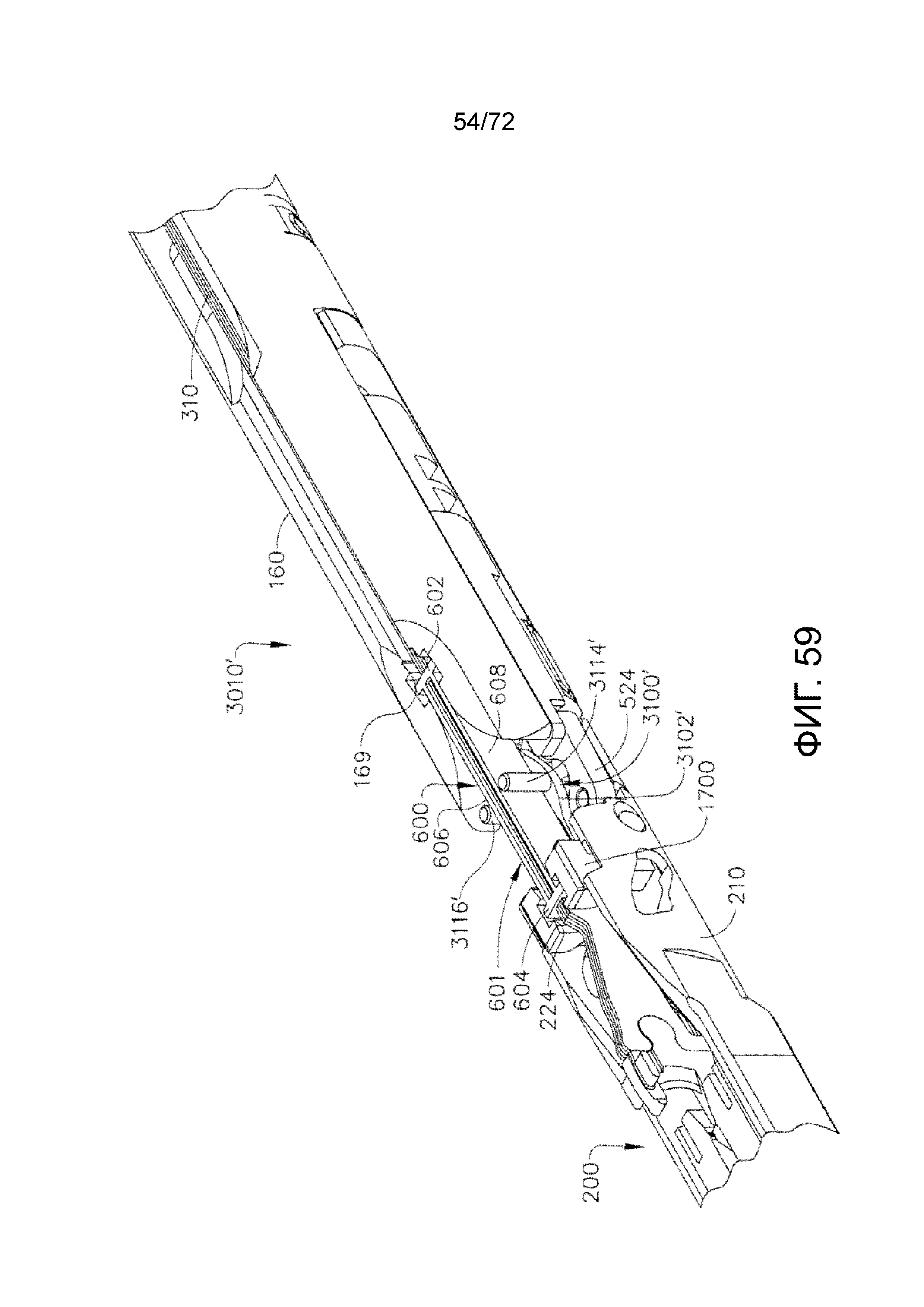
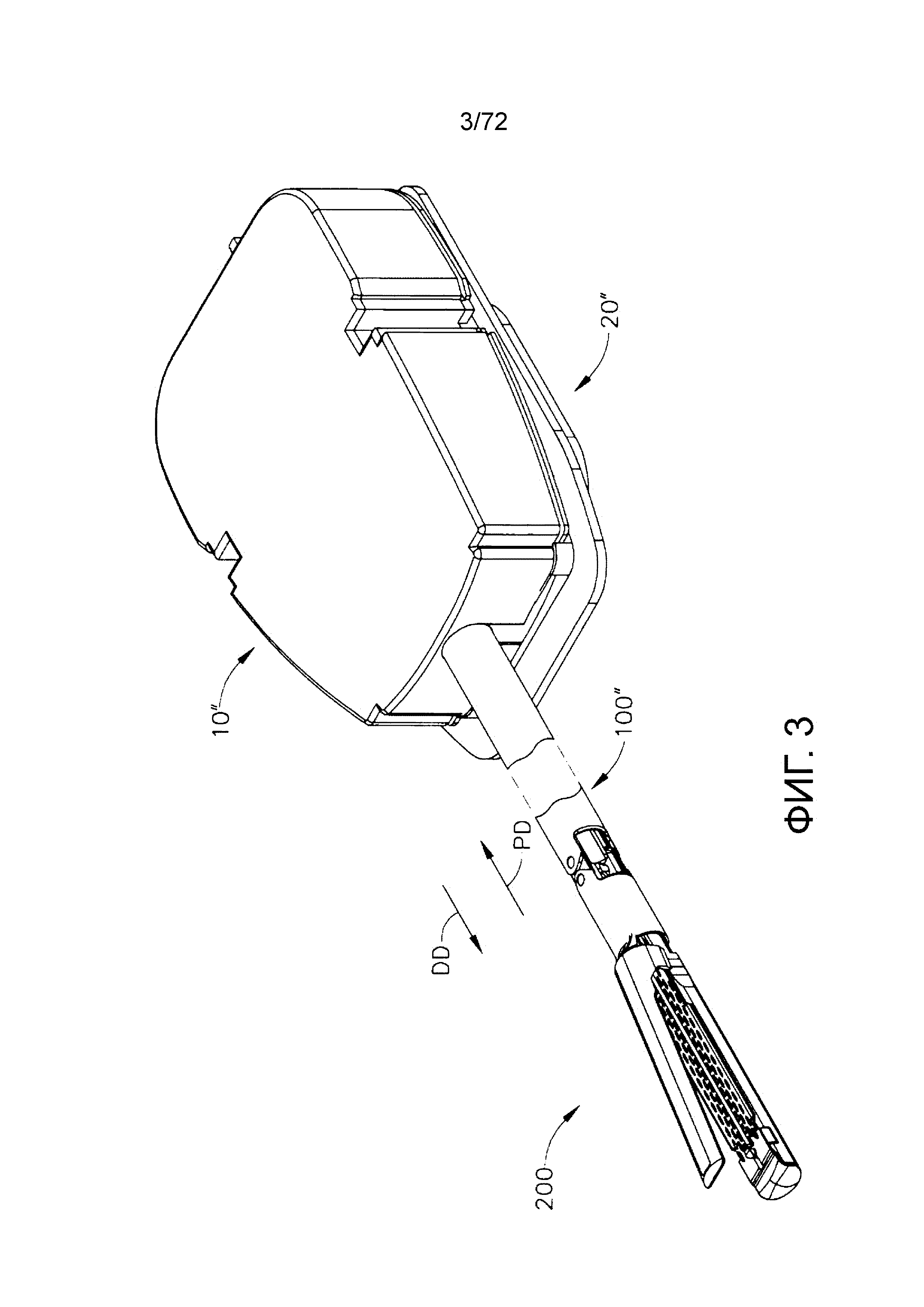
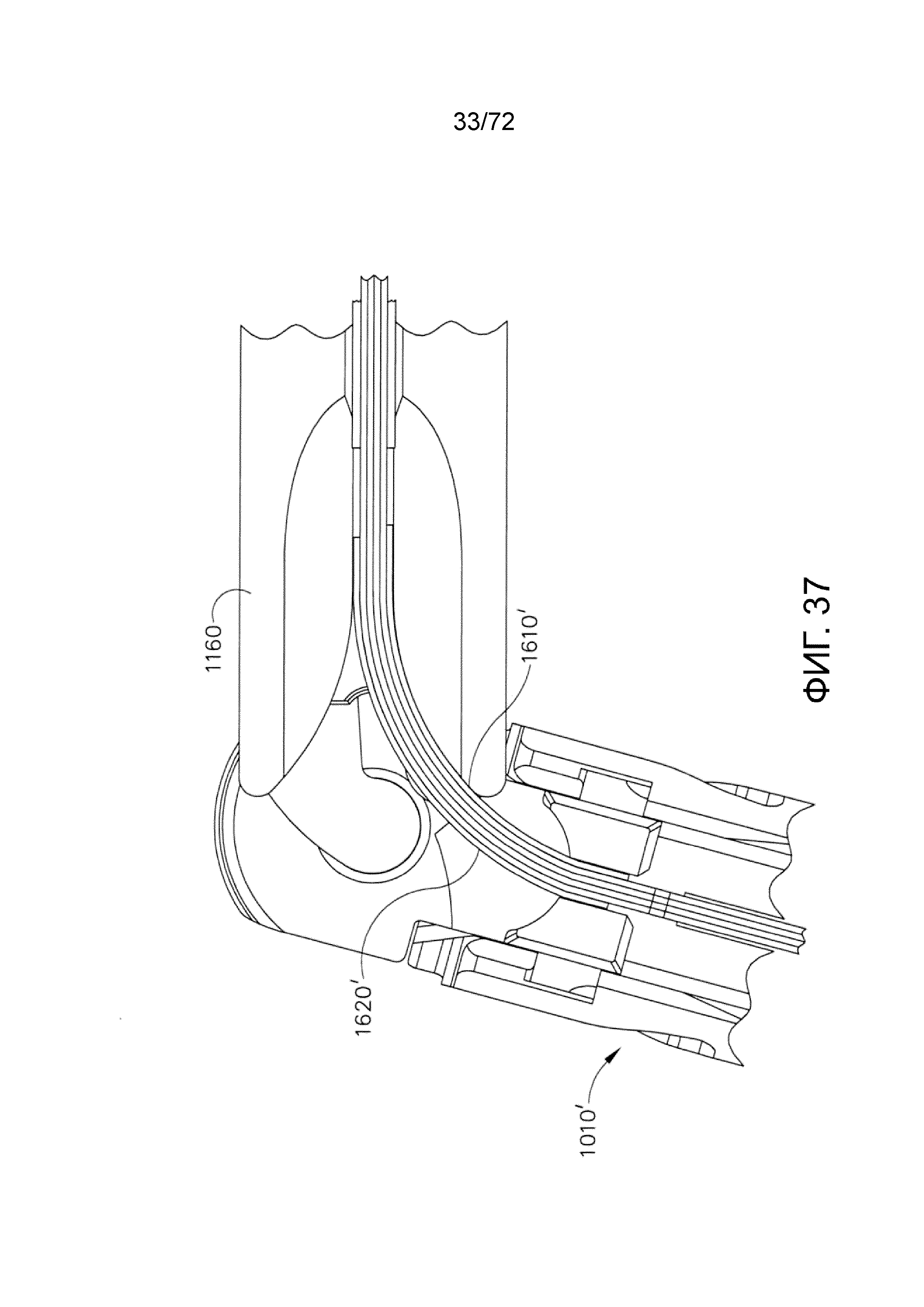
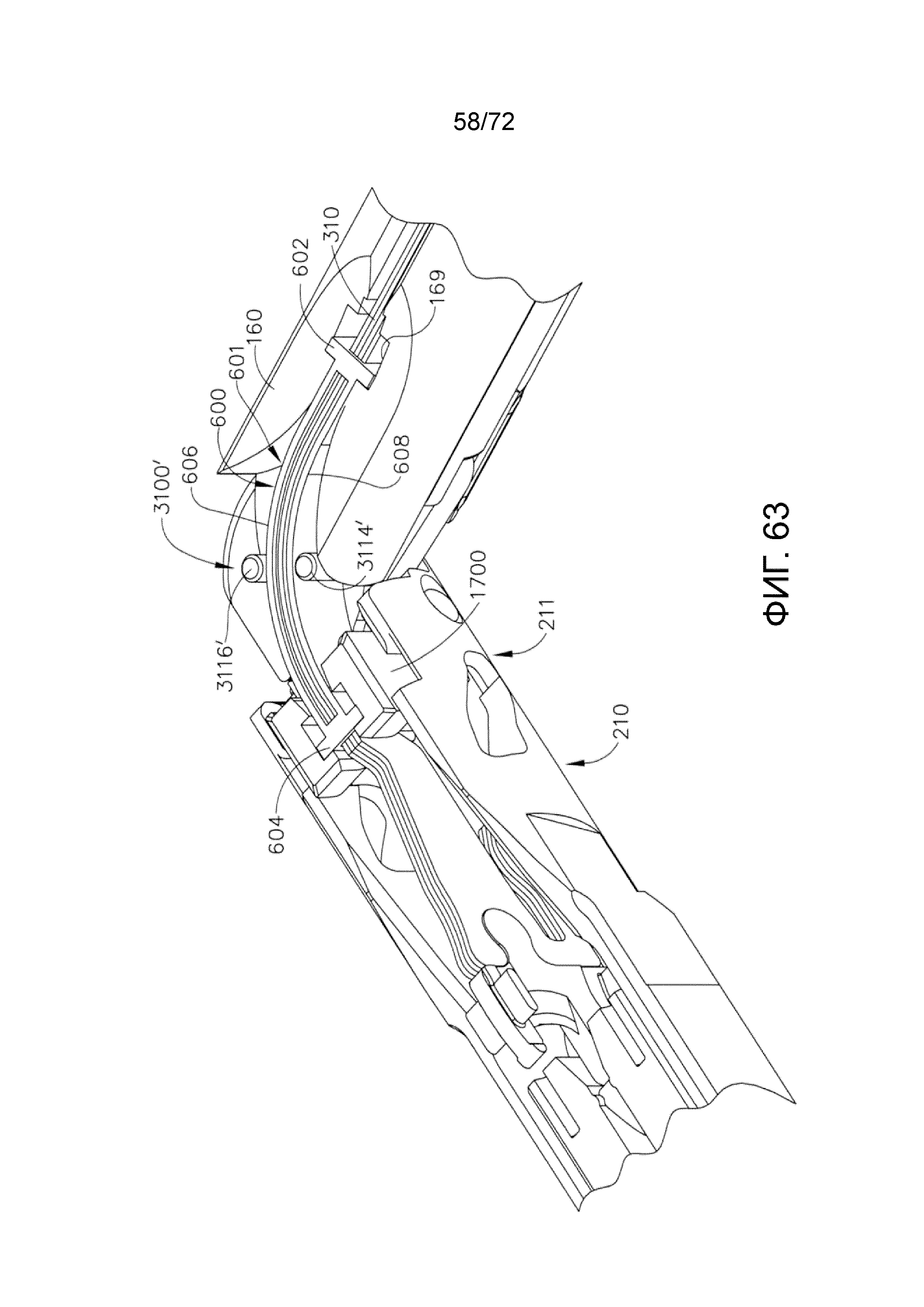
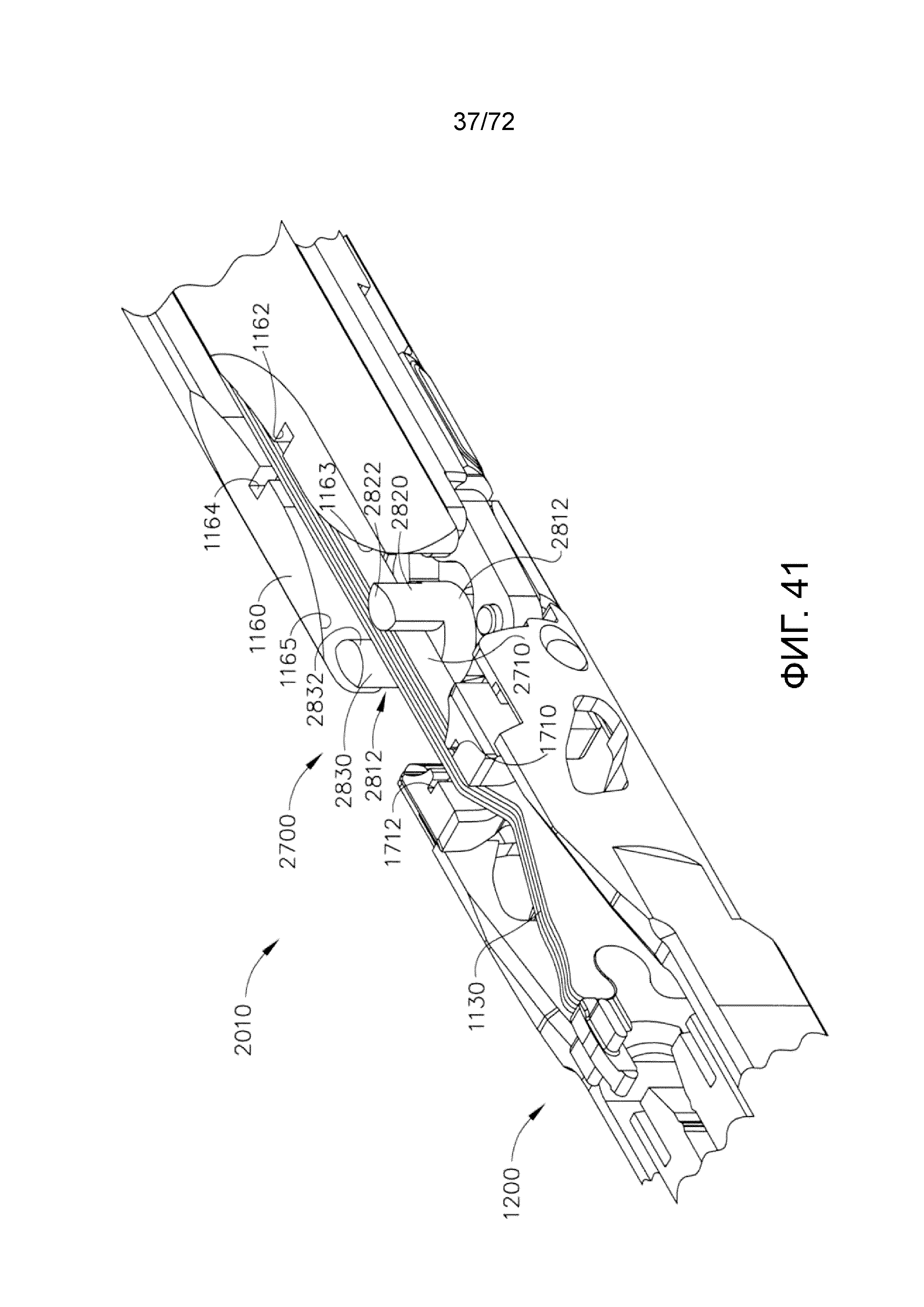
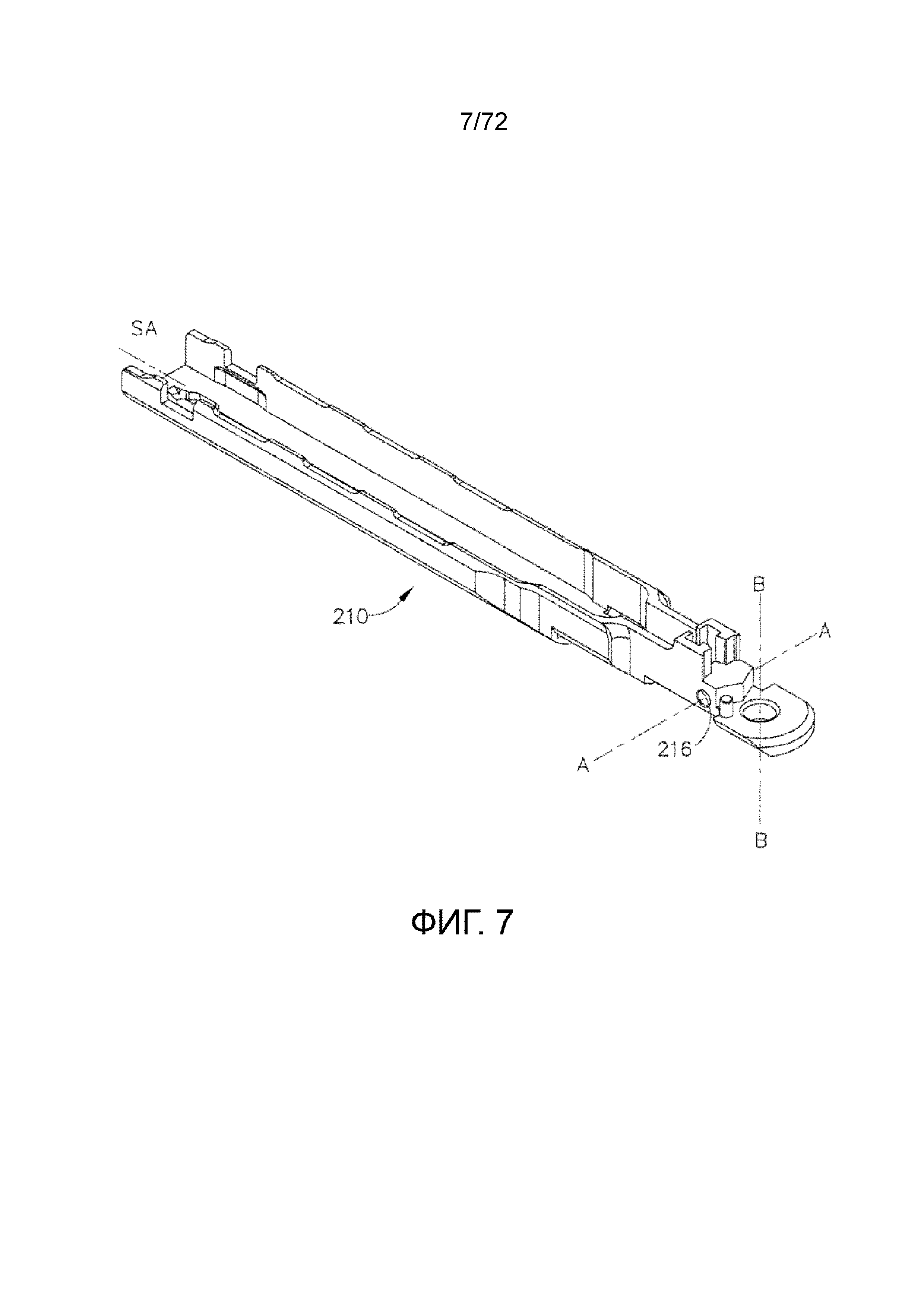
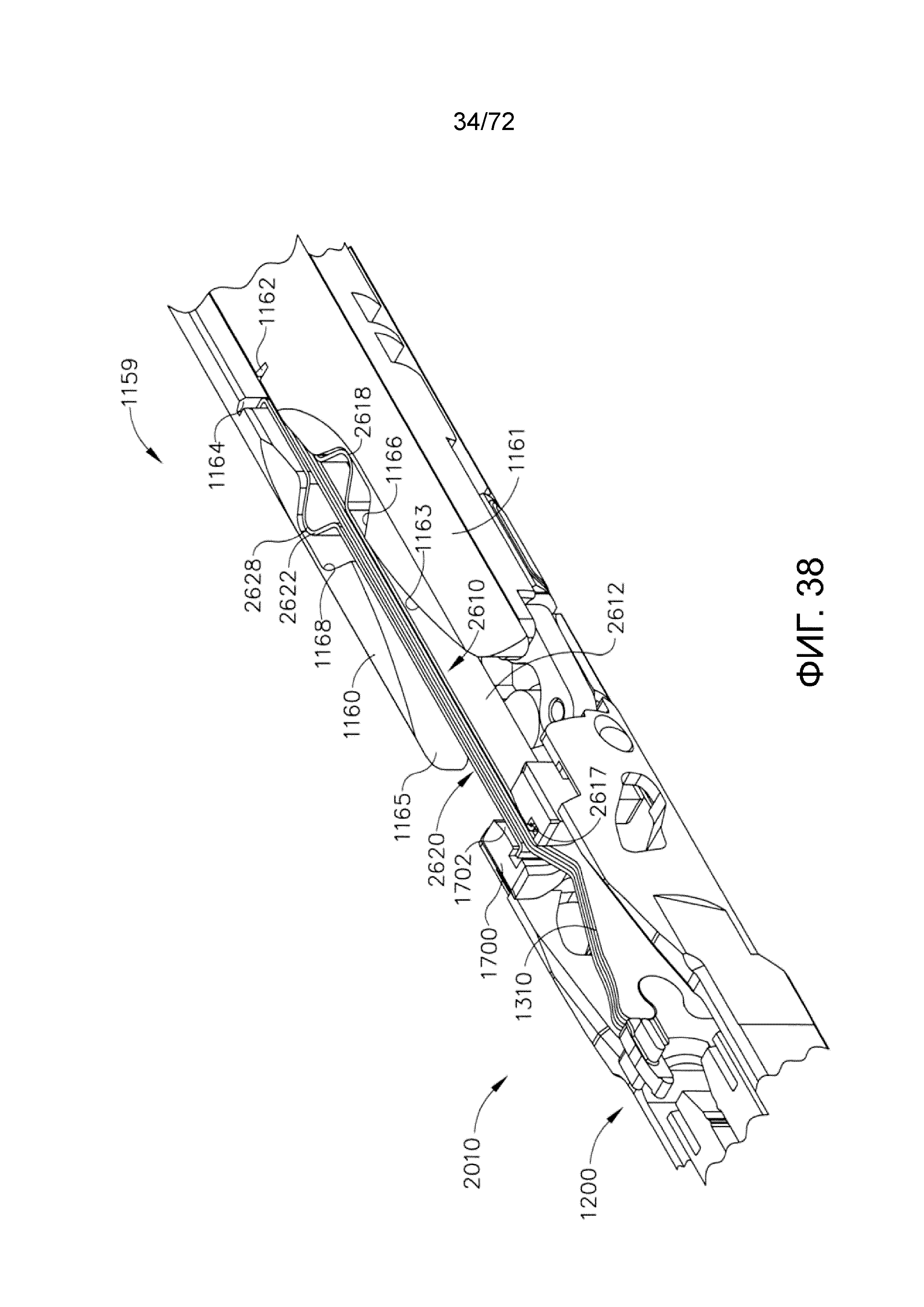
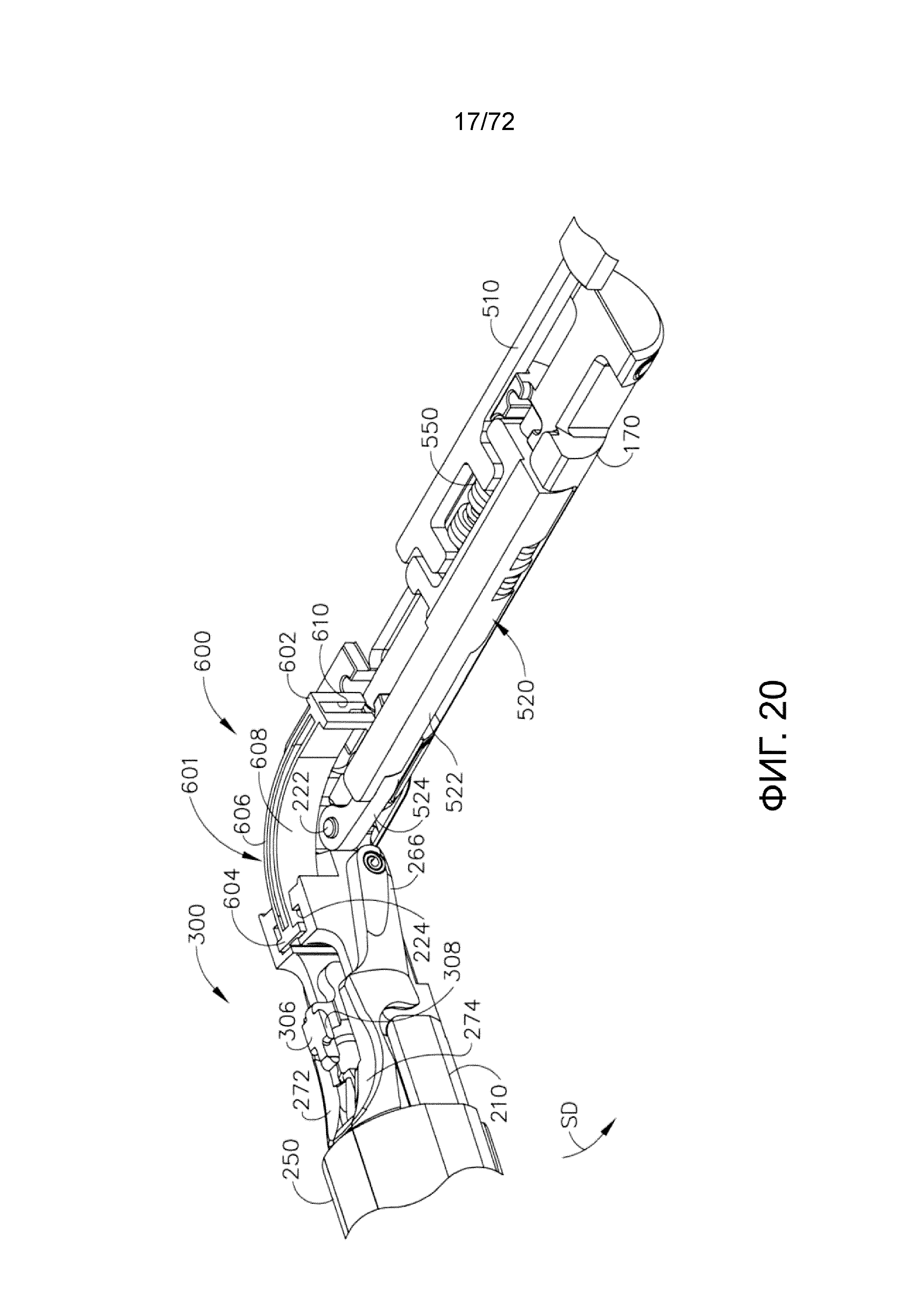
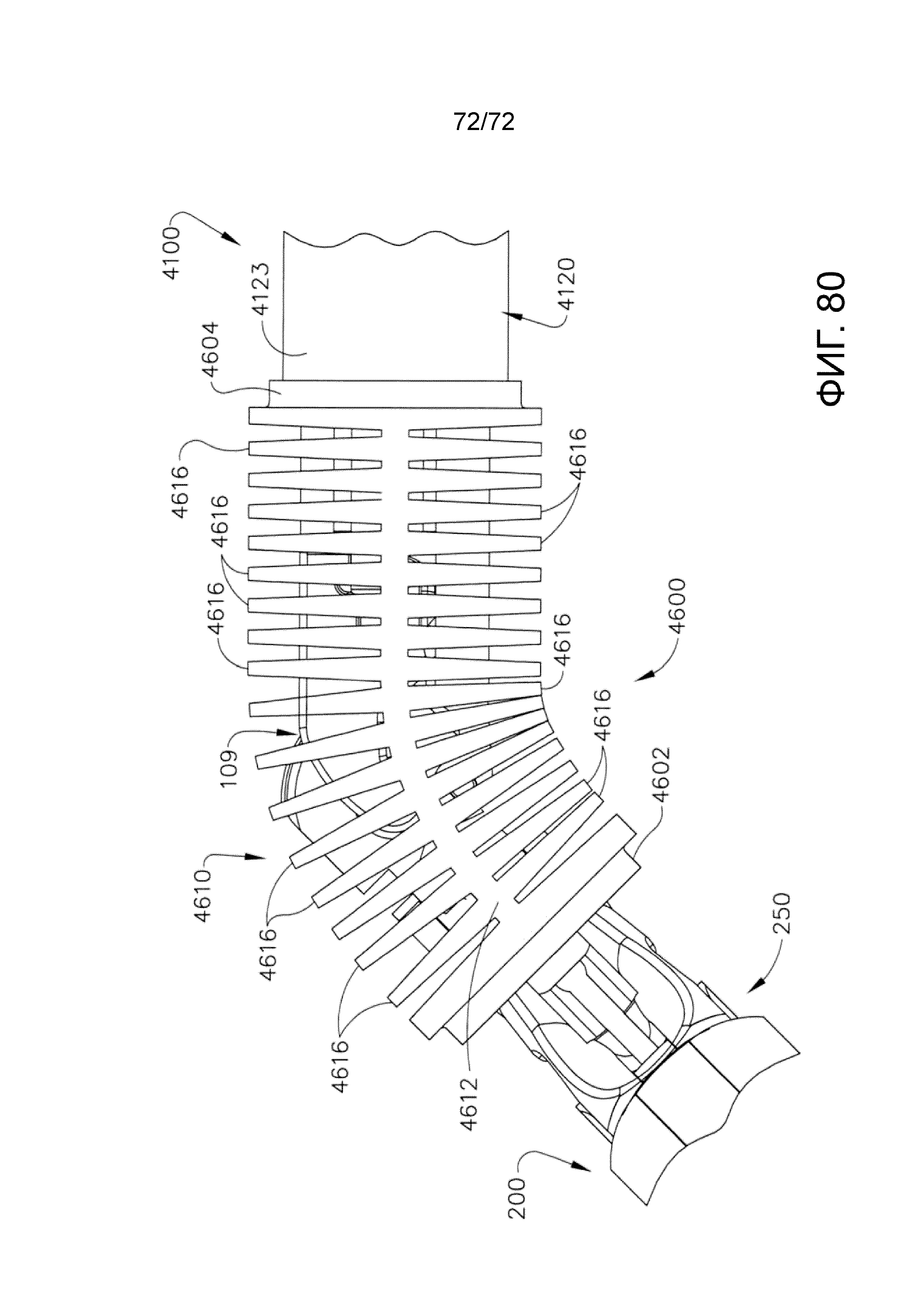
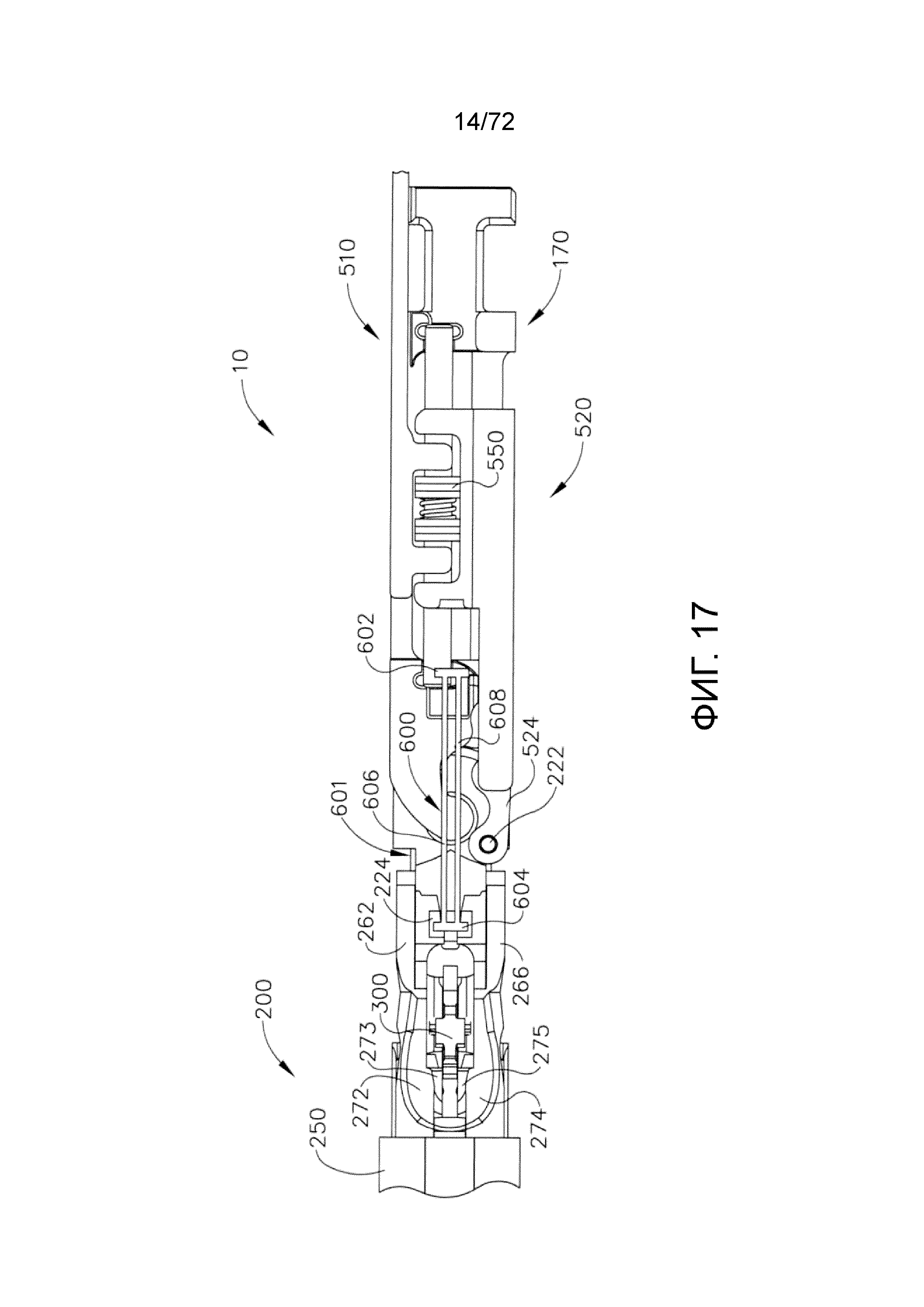
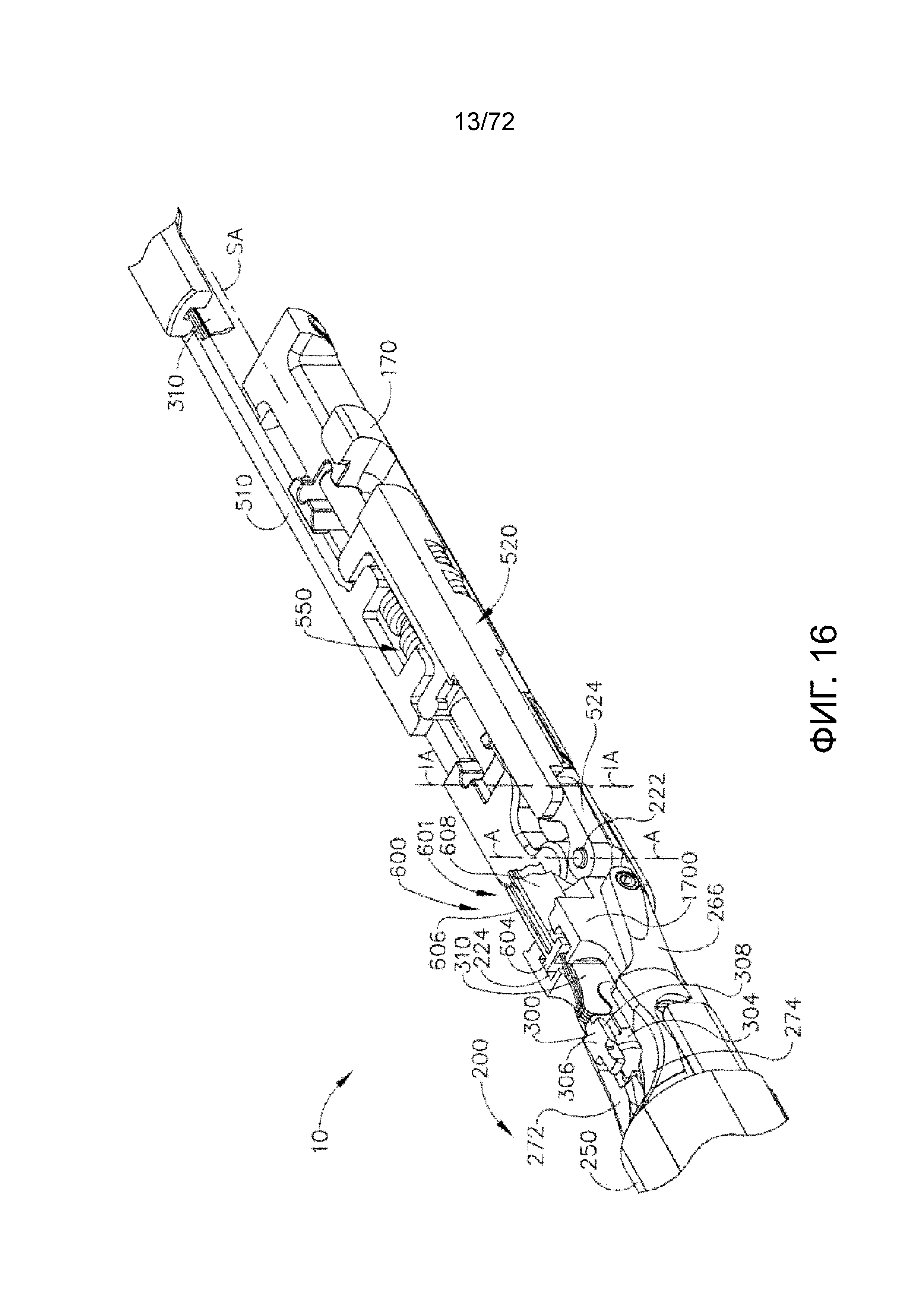
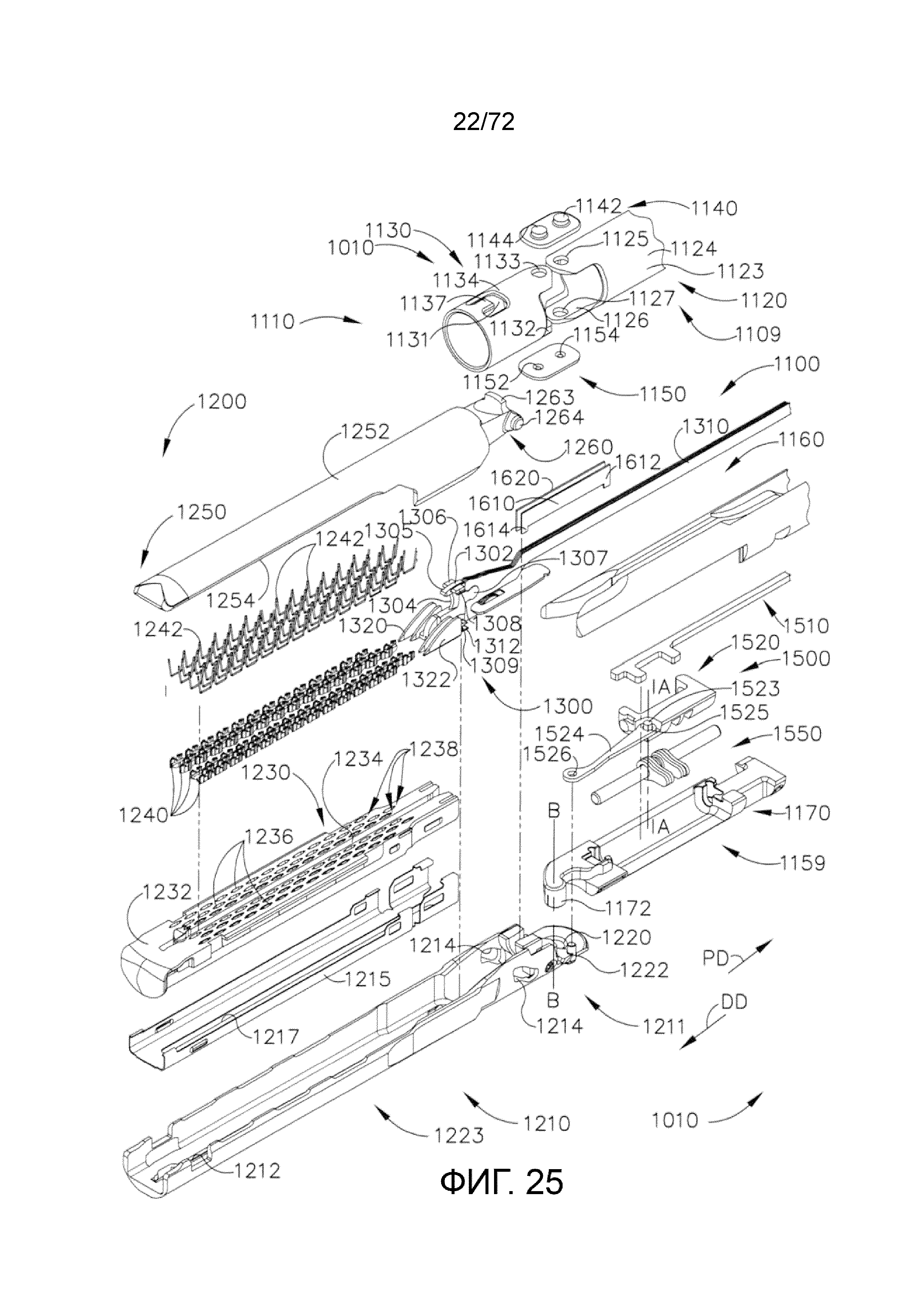
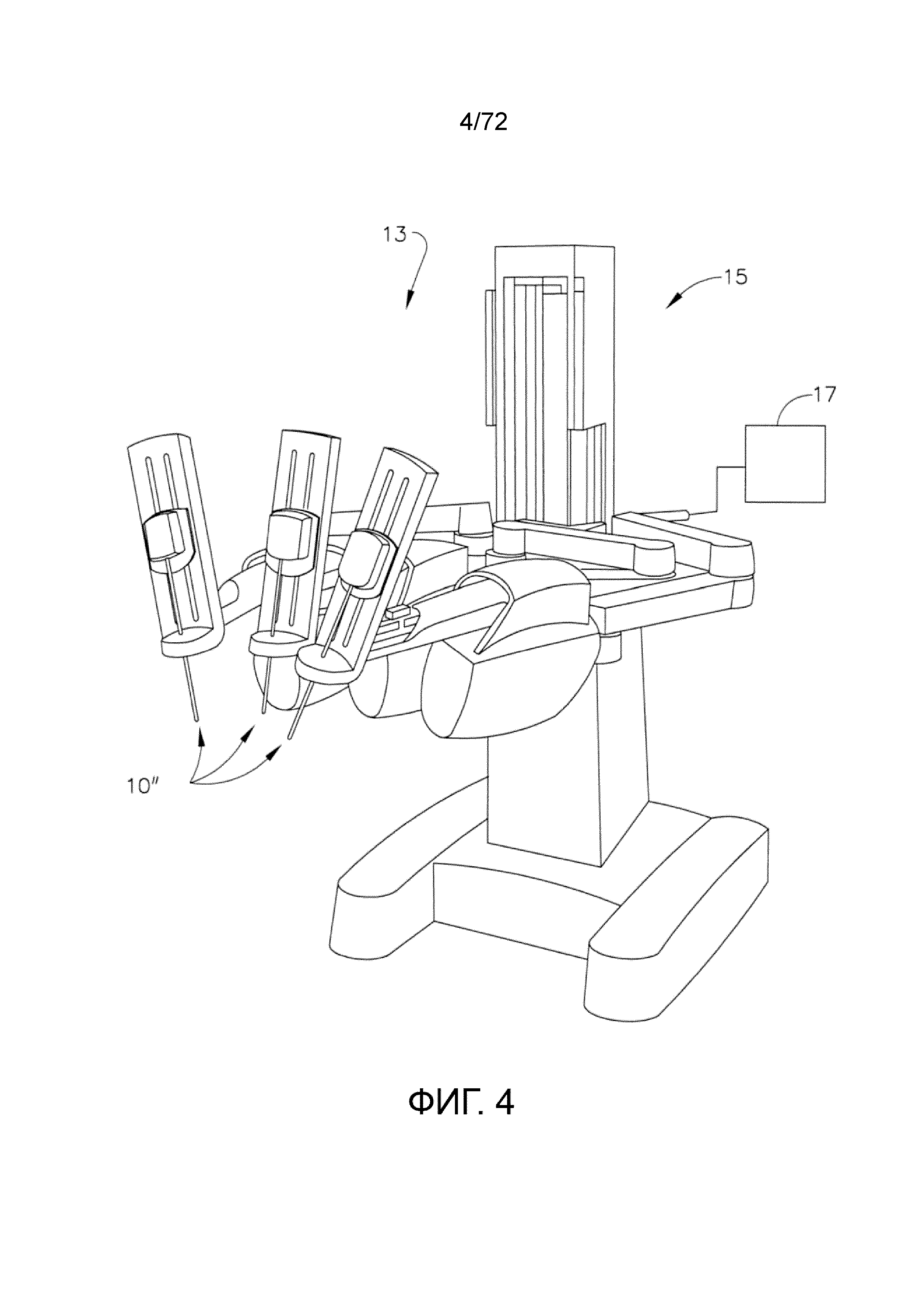
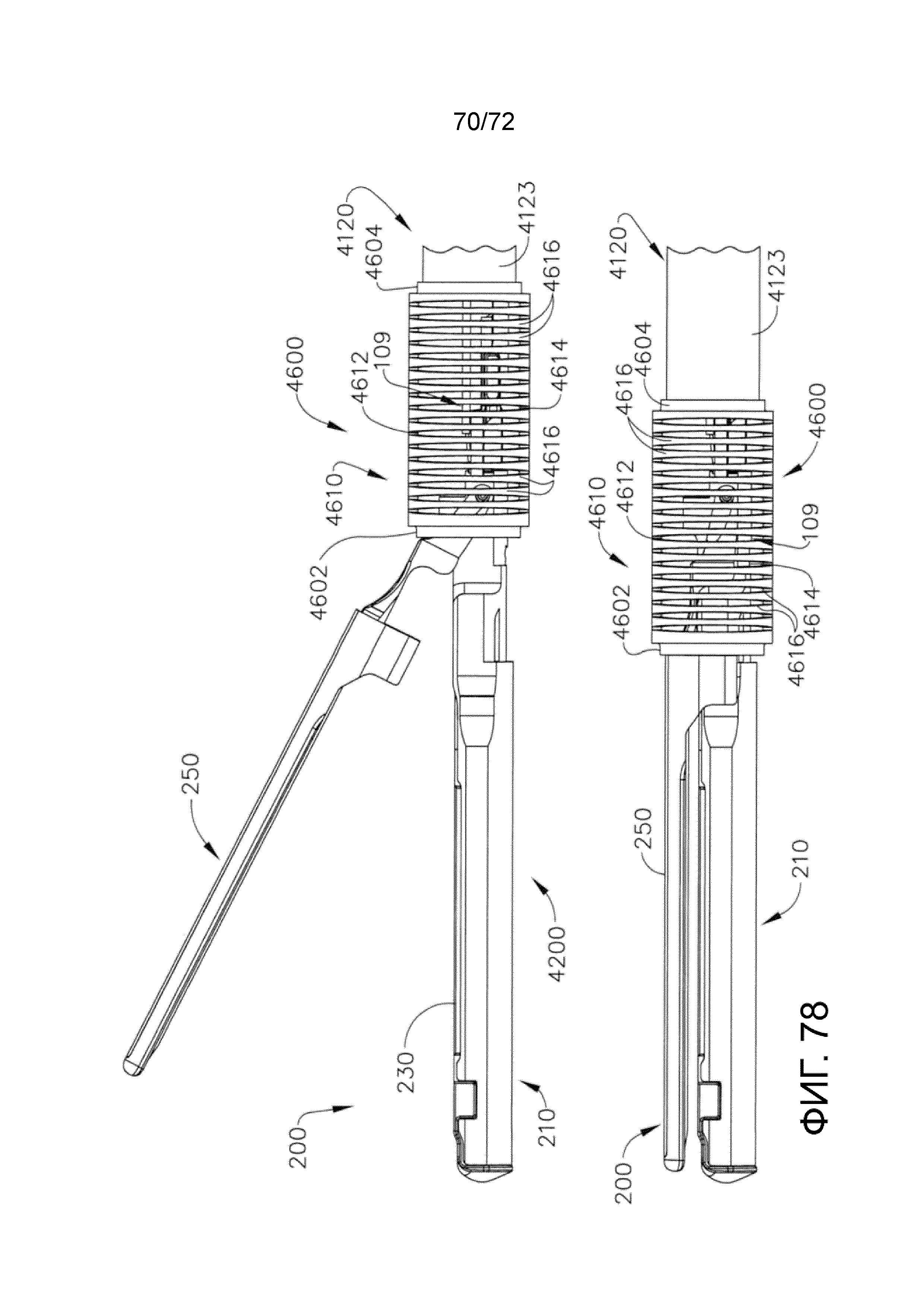
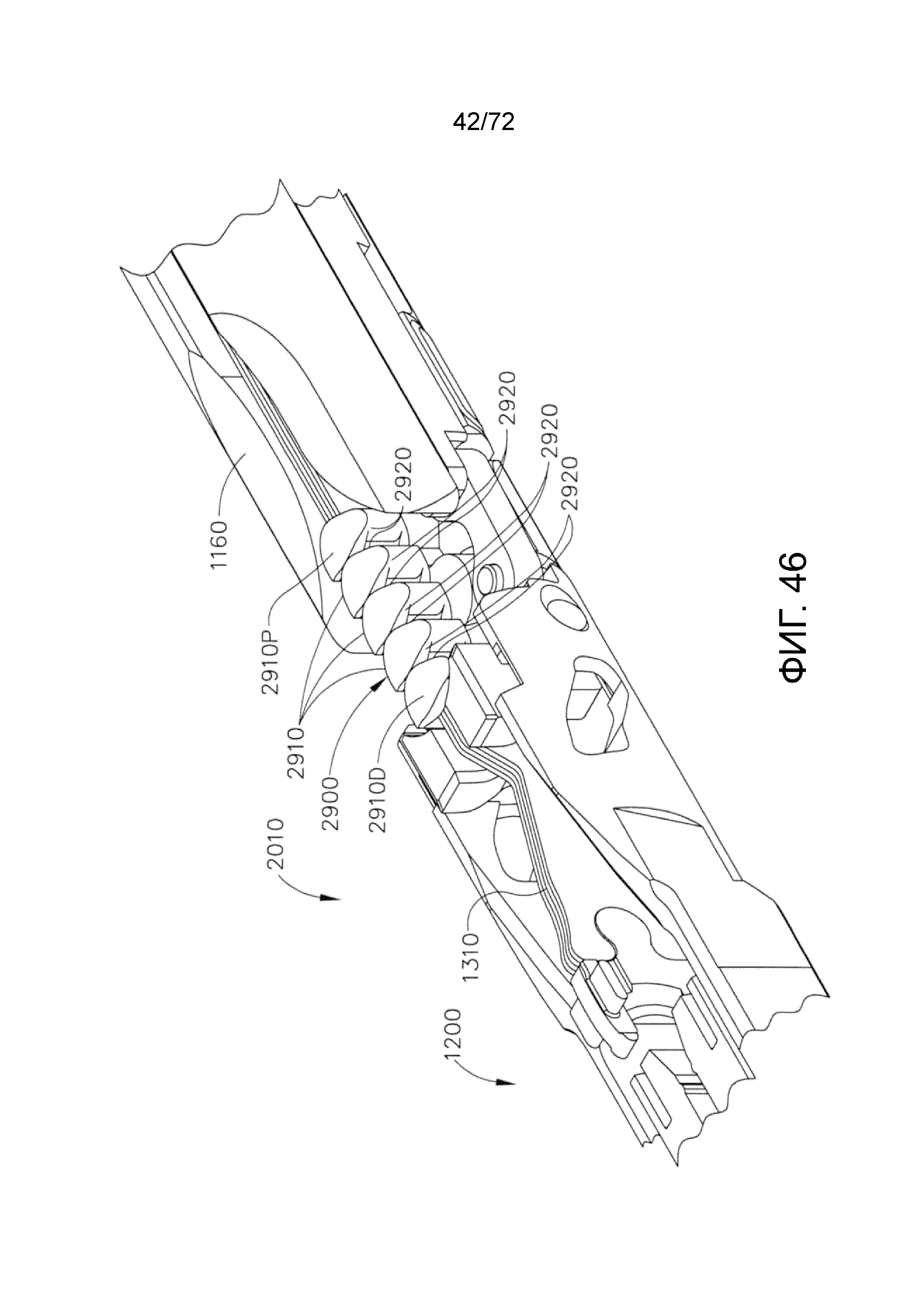
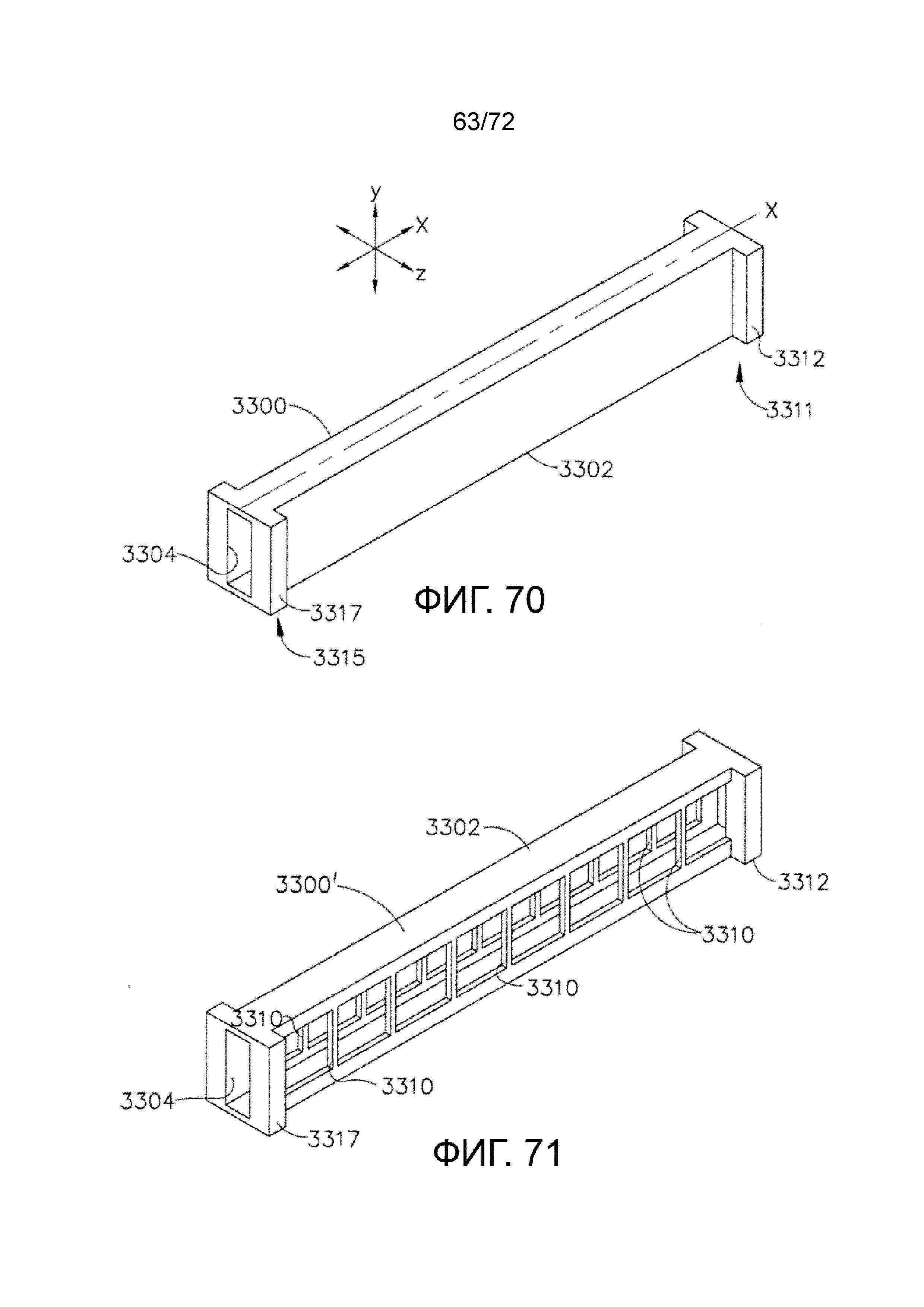
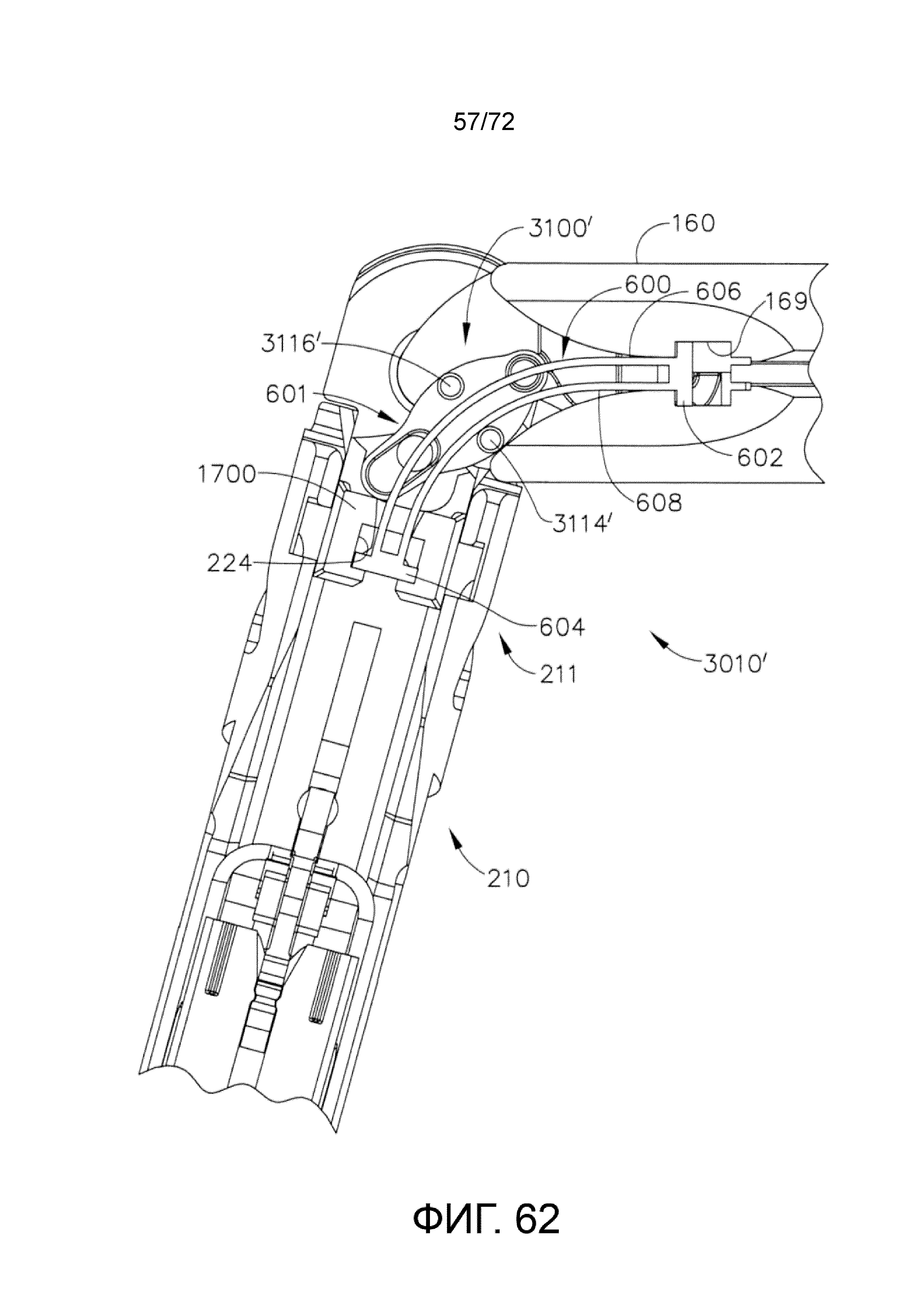
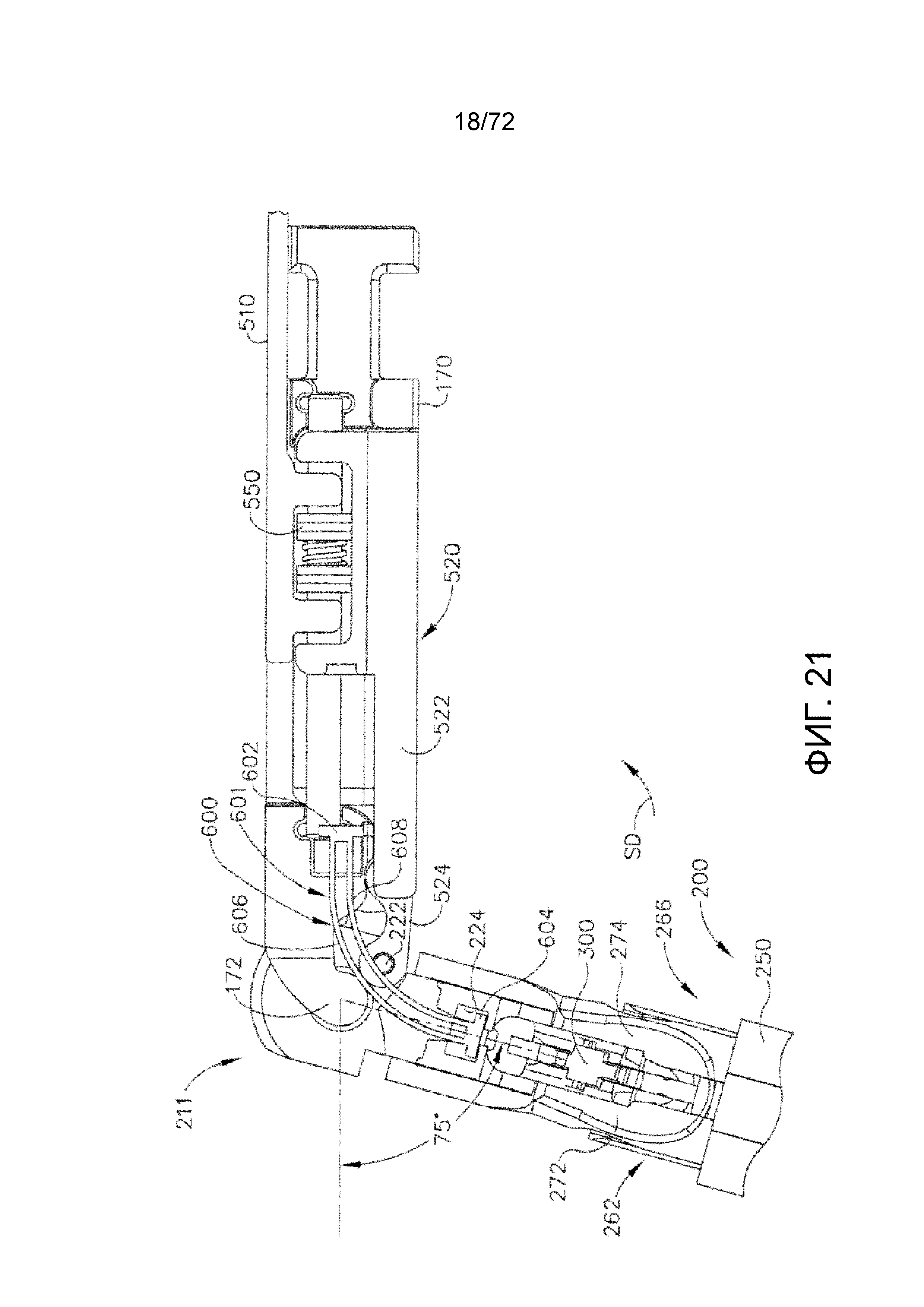
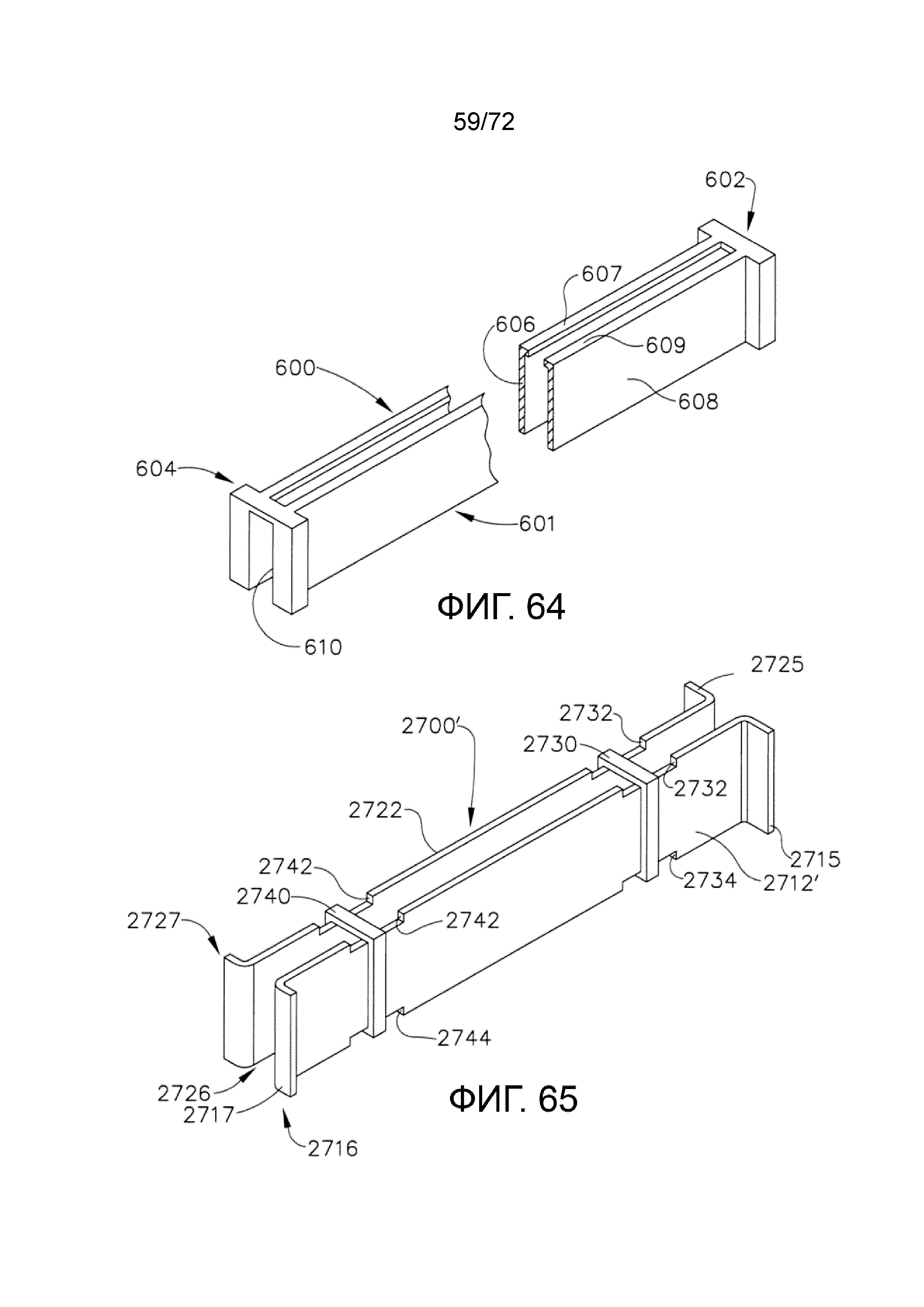
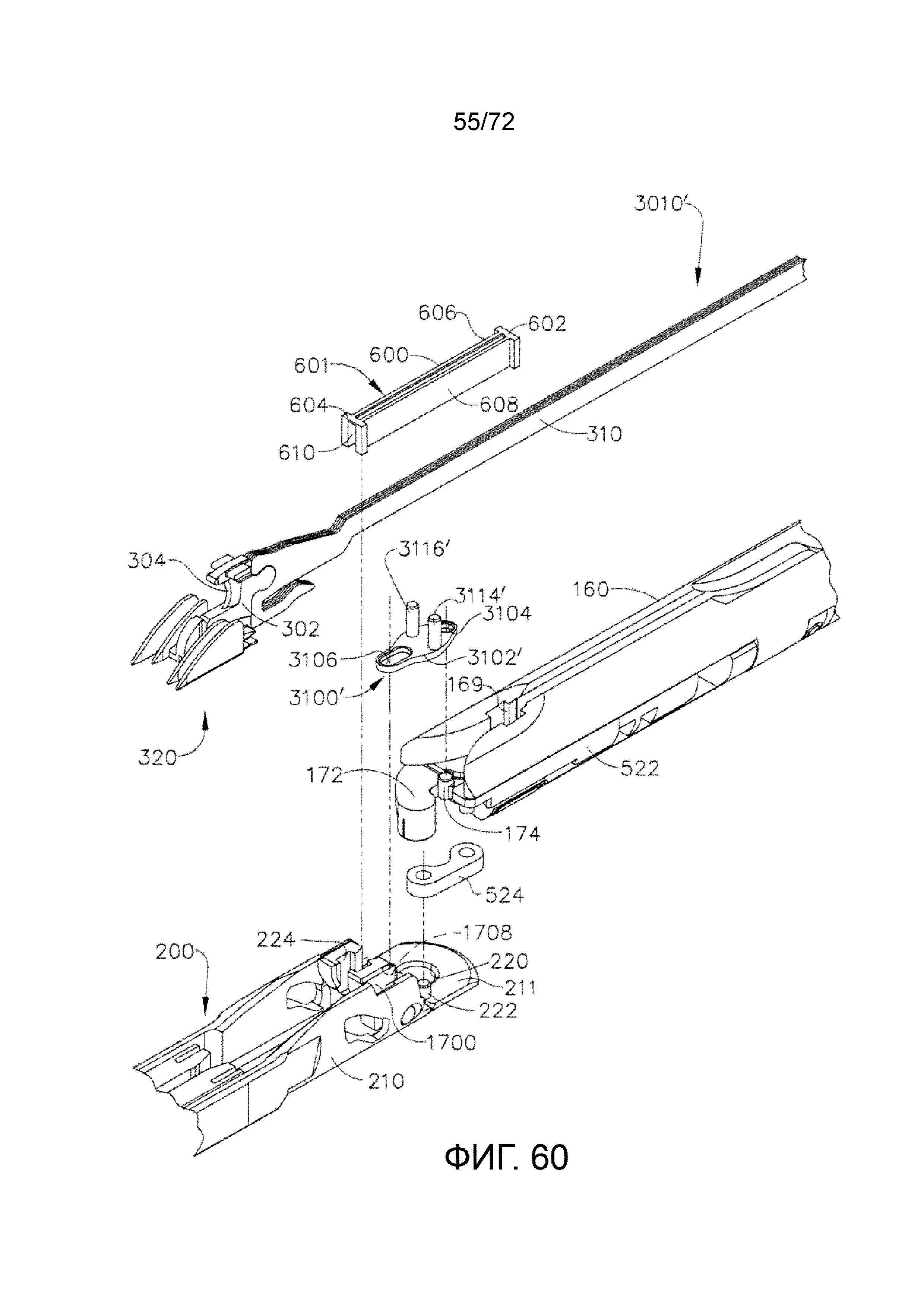
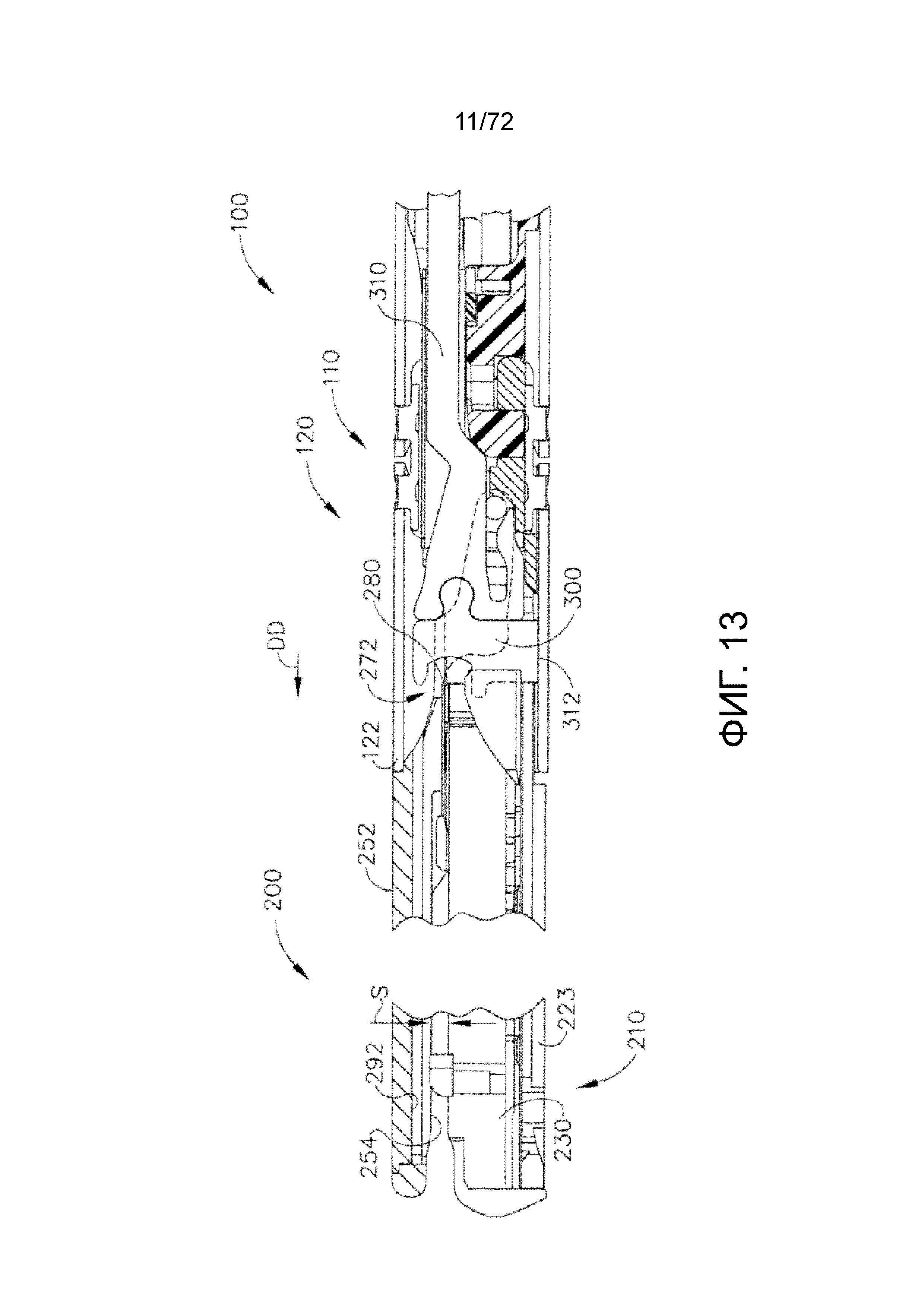
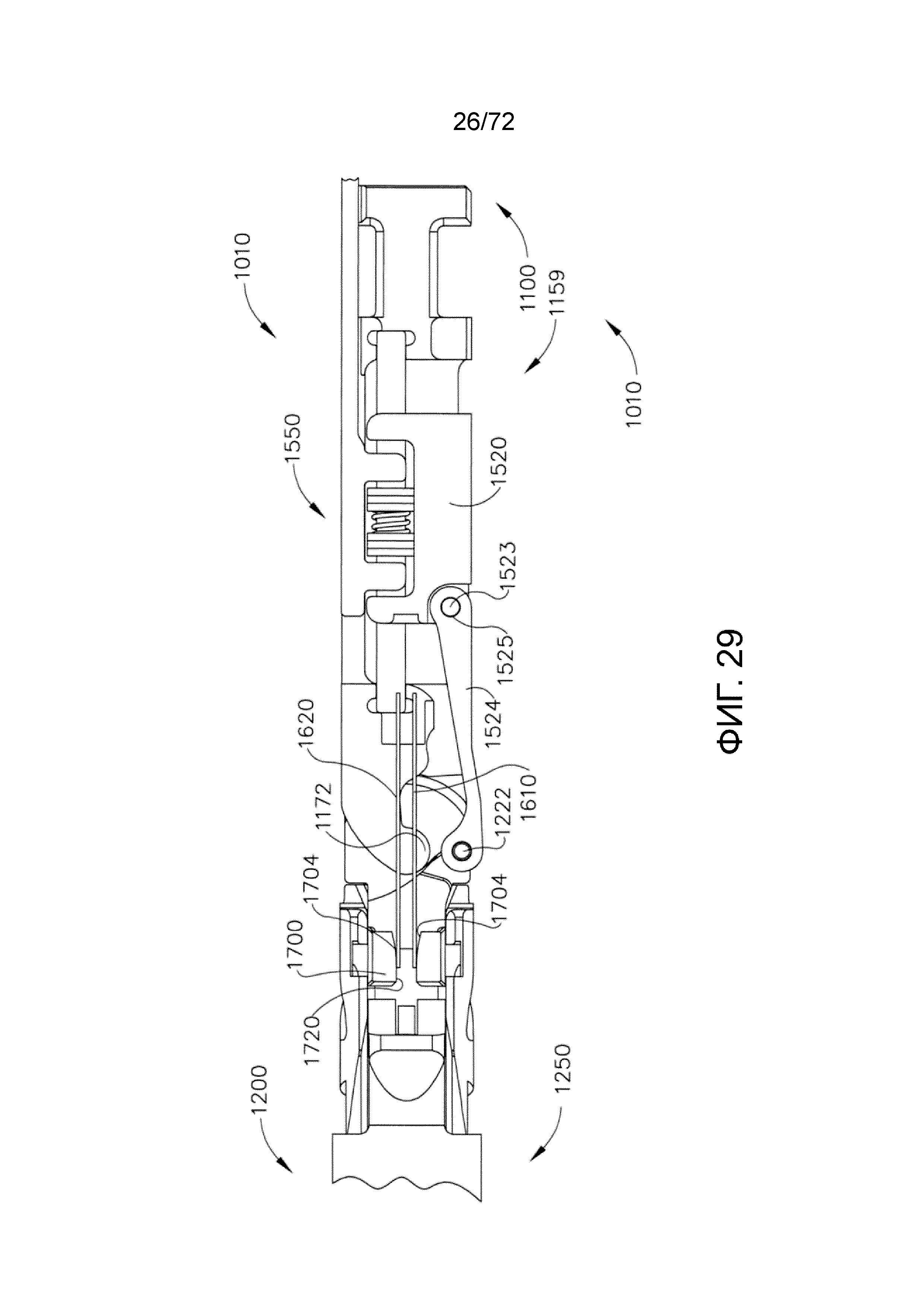
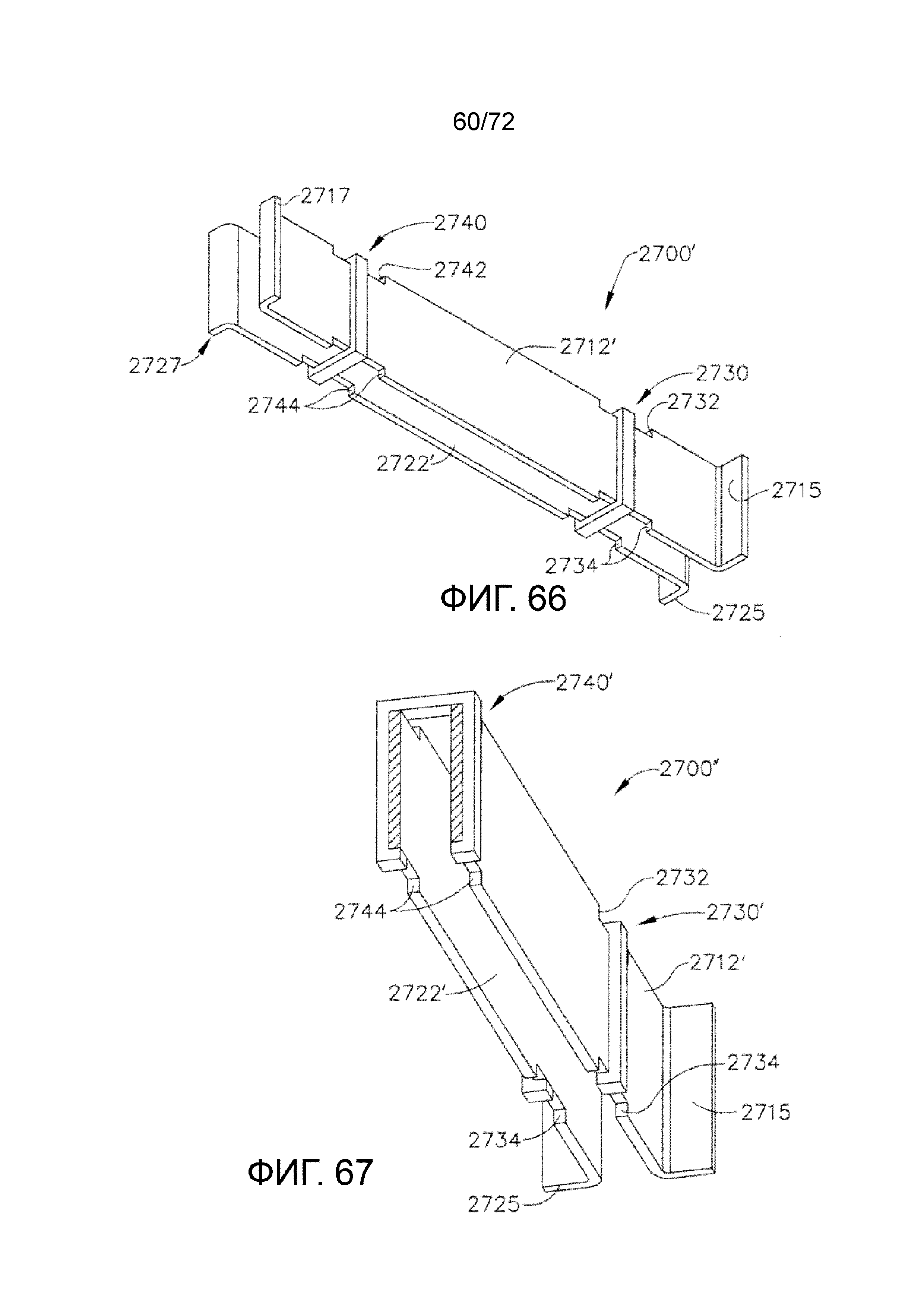
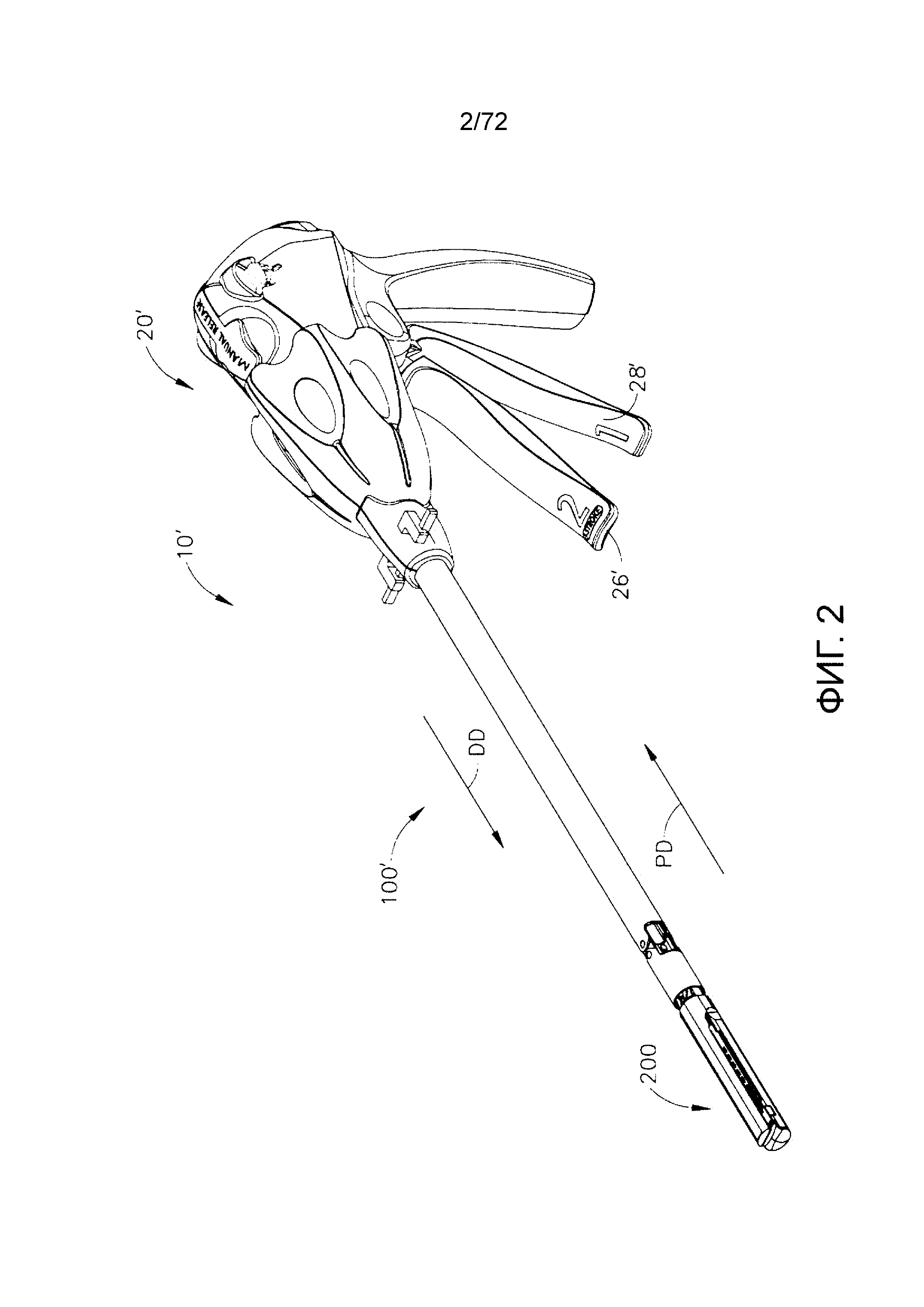
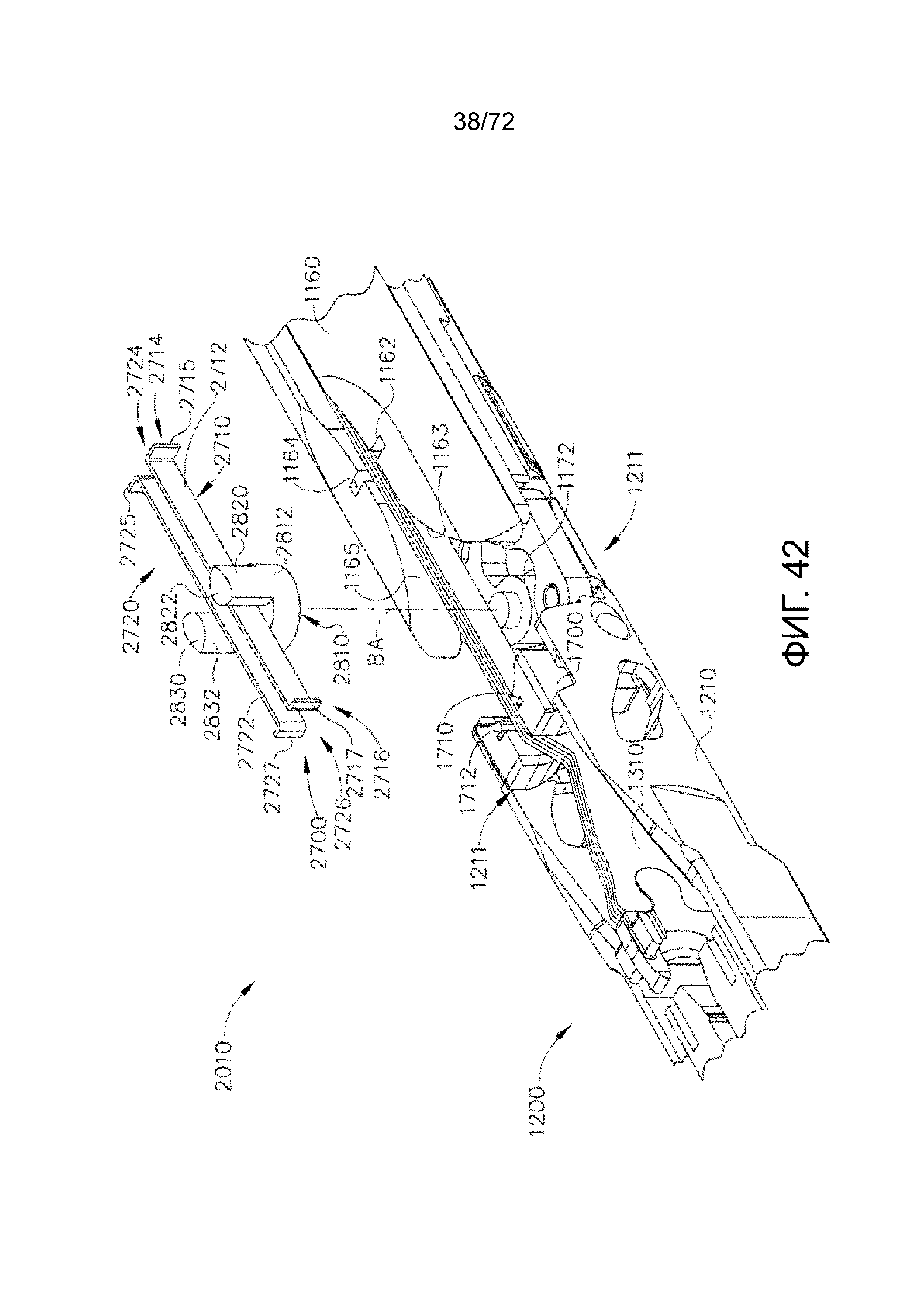
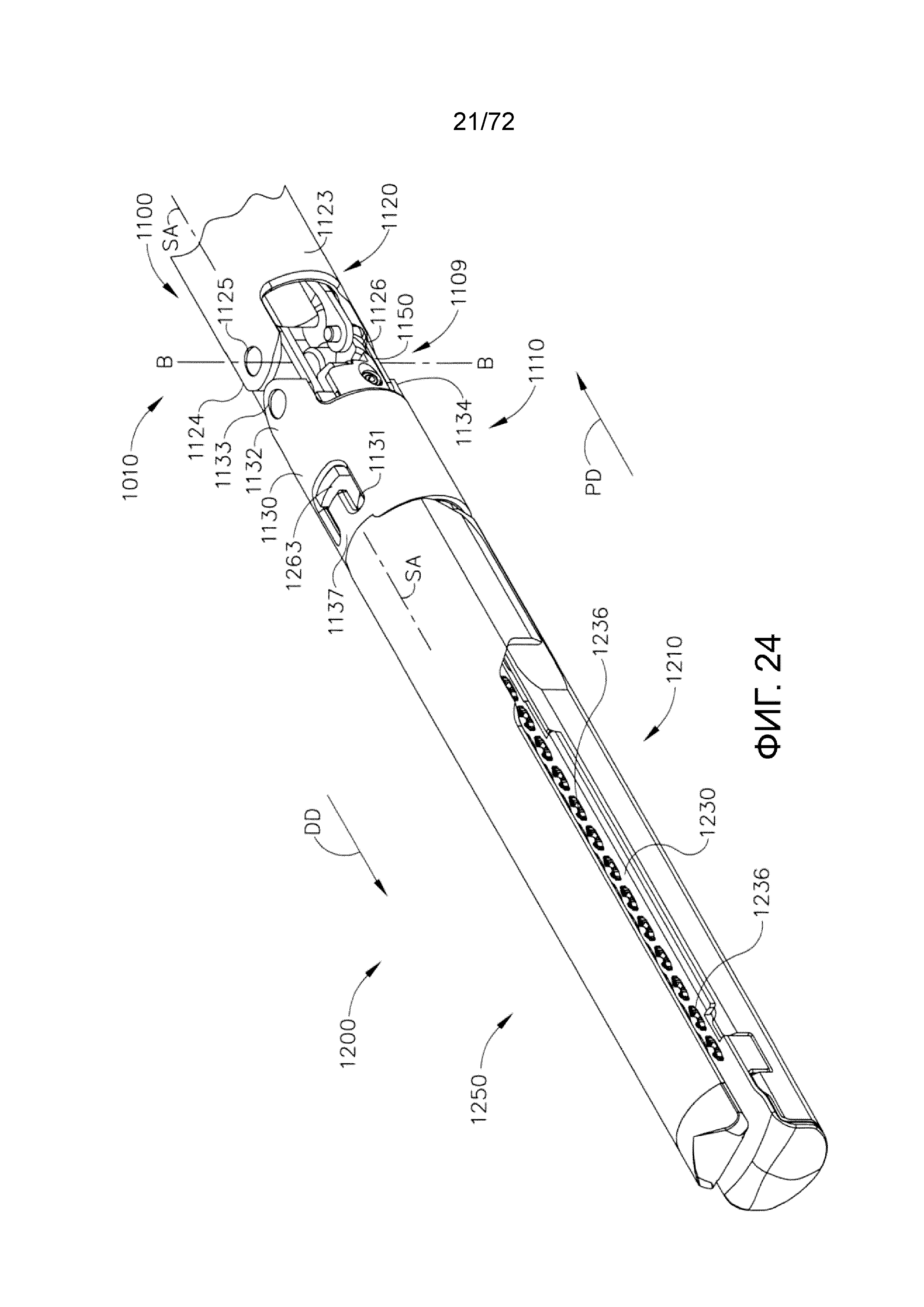
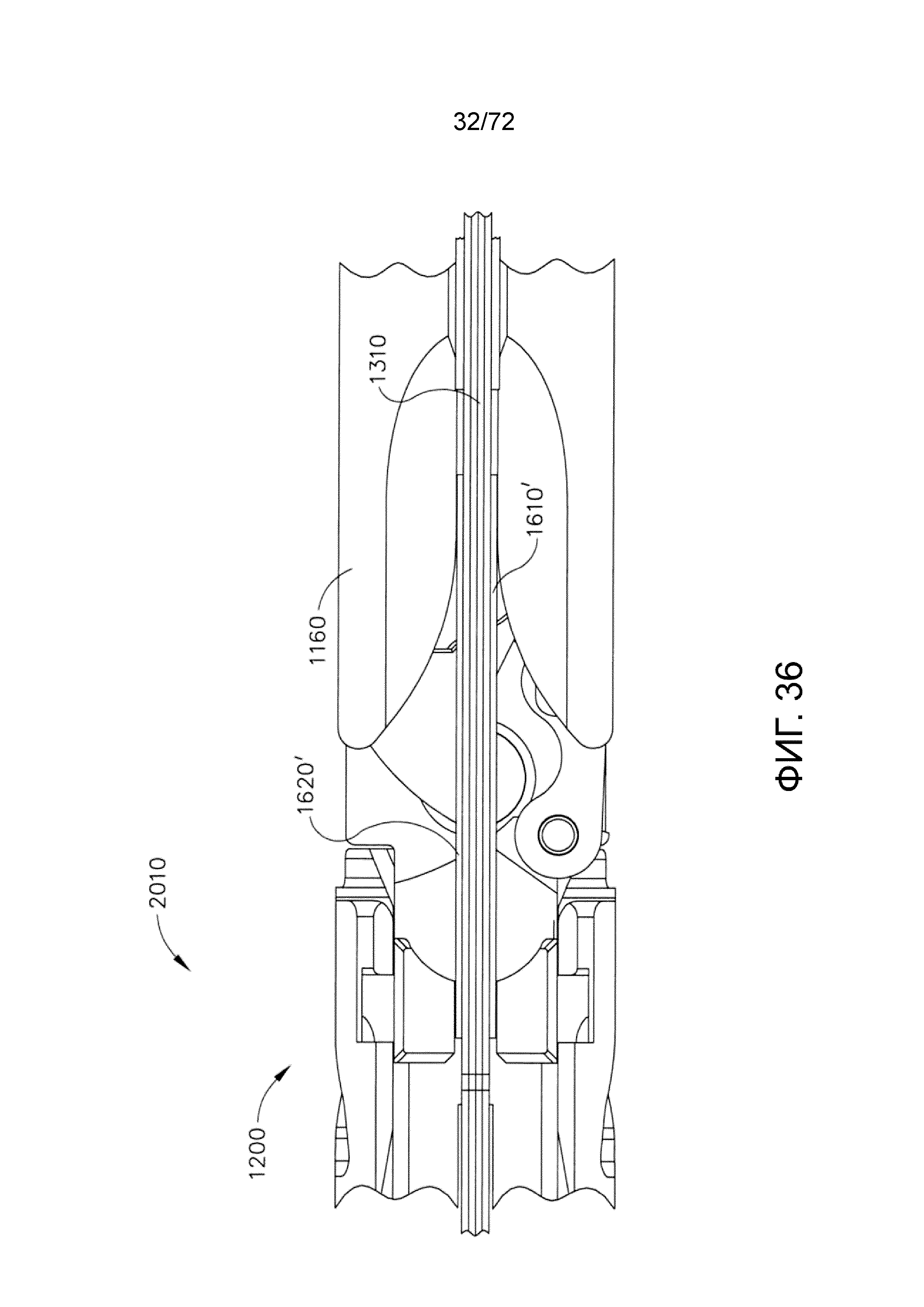
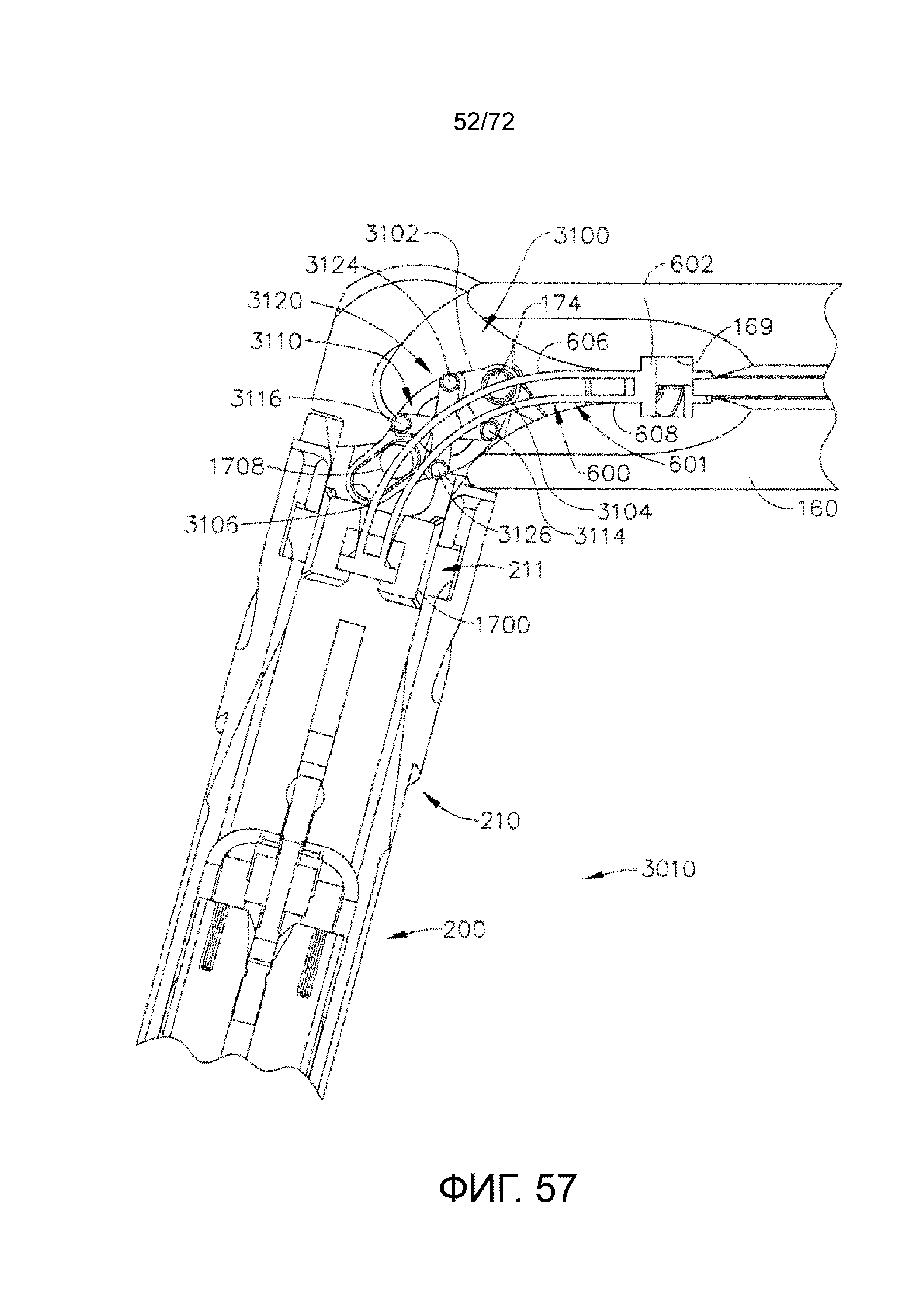
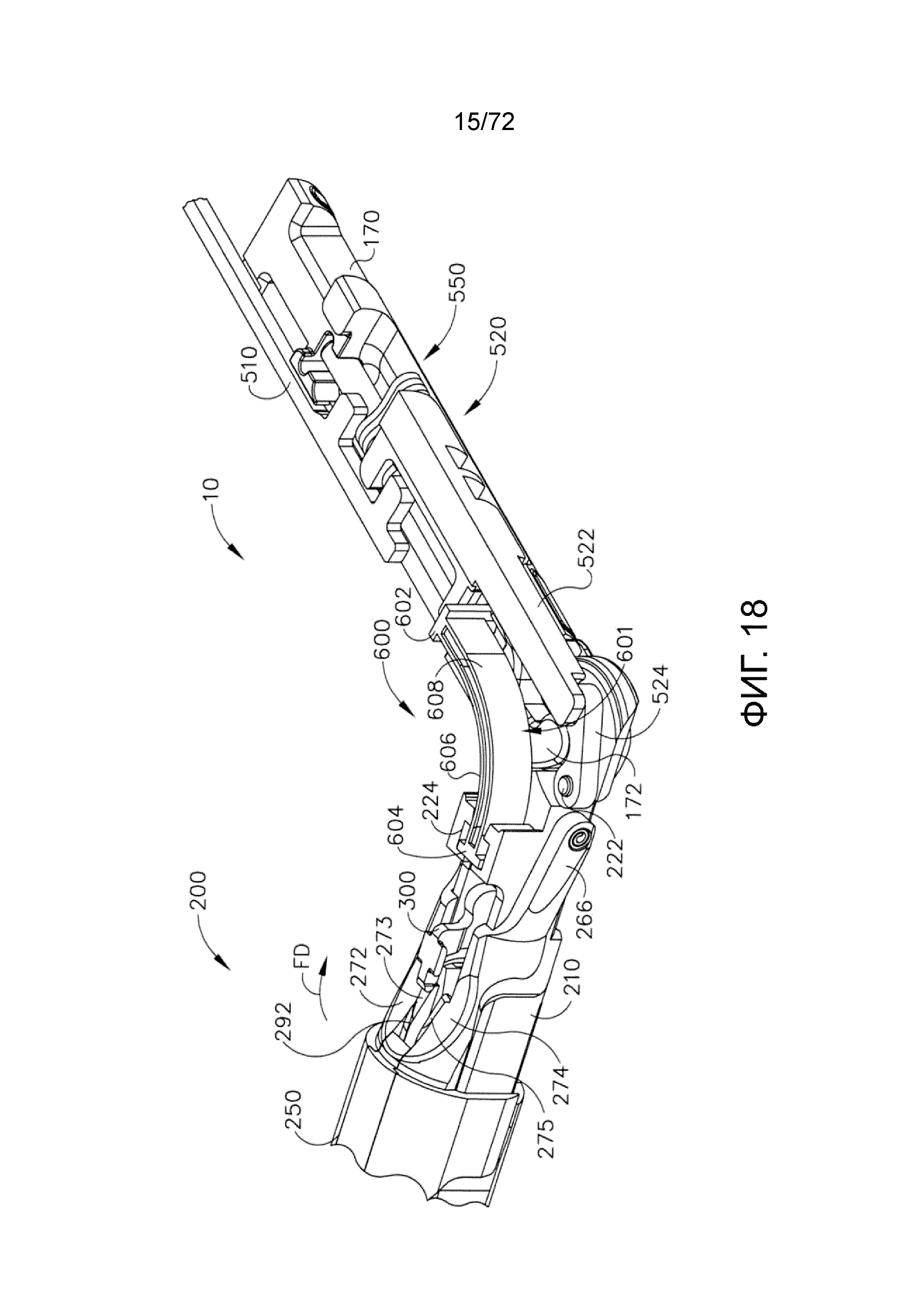
Пневмоприводной хирургический отрезной и фиксирующий аппарат с емкостью хранения увеличенного объема
Пневмоприводной хирургический отрезной и фиксирующий аппарат с исполнительным устройством на дистальном конце
Пневмоприводной хирургический отрезной и фиксирующий аппарат с плавным регулированием скорости приведения в действие прошивки/отрезания с механической поддержкой
Пневмоприводной хирургический отрезной и фиксирующий аппарат с механической рычажной передачей, связывающей движение концевого эффектора и рычага
Пневмоприводной хирургический отрезной и фиксирующий аппарат с ручным отводящим устройством
Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты)
Опорный материал с активируемым вяжущим веществом
Хирургический сшивающий аппарат с элементами управления, пригодными для работы одной рукой
Хирургический сшивающий аппарат с шарнирно-поворачиваемыми компонентами
Одноразовый загрузочный модуль с индикатором прошивки/отрезания

