Результат интеллектуальной деятельности: Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений)
Вид РИД
Изобретение
Изобретение относится к области приборостроения, в частности, к датчикам перемещений и предназначено для применения в приборах, измеряющих малые ускорения и скорости вращения - акселерометрах и гироскопах.
Известны микромеханические приборы [1, стр. 165-174], в которых в качестве прямых преобразователей перемещений в электрический сигнал (датчиков перемещений) использованы конденсаторы, МДП транзисторы, тензодатчики, магниторезистивные датчики, датчики на поверхностно-акустических волнах, струны, оптоволоконные датчики и т.д.
В настоящее время чаще всего используются емкостные датчики [2], представляющие собой сложную гребенчатую структуру. Недостатками таких датчиков является относительно большие габариты, наличие силовых тяжений и возможность прилипания обкладок.
Этими недостатками не обладает пьезоэлектрический датчик [3]. Однако у него малая чувствительность.
Наивысшую чувствительность имеет оптический датчик [1, стр. 170], чувствительность которого оценивается половиной длины волны света 
Повышение чувствительности приборов возможно двумя способами: увеличением перемещения под действием малой силы и увеличением чувствительности преобразователя перемещения в электрический сигнал. Для увеличения диапазона перемещений пробного тела под действием малых сил стремятся улучшить качество подвеса: строят подвесы с низкой жесткостью или резонансные системы с высокой добротностью. Эти направления противоречат друг другу и их выполнение ограничено старением материалов, влиянием температуры, механическими перегрузками, акустическими внешними воздействиями, технологическими трудностями и т.д. Повышение чувствительность известных датчиков в основном ограничено габаритами микромеханического прибора.
В качестве наиболее чувствительного датчика в допустимых габаритах можно взять туннельный микроскоп [4].
Задачей изобретения является улучшение характеристик микромеханических приборов путем повышения чувствительности прямого преобразователя (датчика) перемещений.
Это достигается тем, что подвижная части датчика перемещений выполнена с возможностью движения в корпусе по направлению действия силы. На корпусе и подвижной части установлены зонд и подложка основного туннельного микроскопа, причем один из этих элементов размещен на каретке, выполненной с возможностью перемещения в плоскости, перпендикулярной направлению действия силы. Для стабилизации в этой плоскости относительного положения зонда и подложки основного туннельного микроскопа введены дополнительные туннельные микроскопы управления кареткой.
Технический результат заключается в повышении чувствительности микромеханических приборов и уменьшении их габаритов.
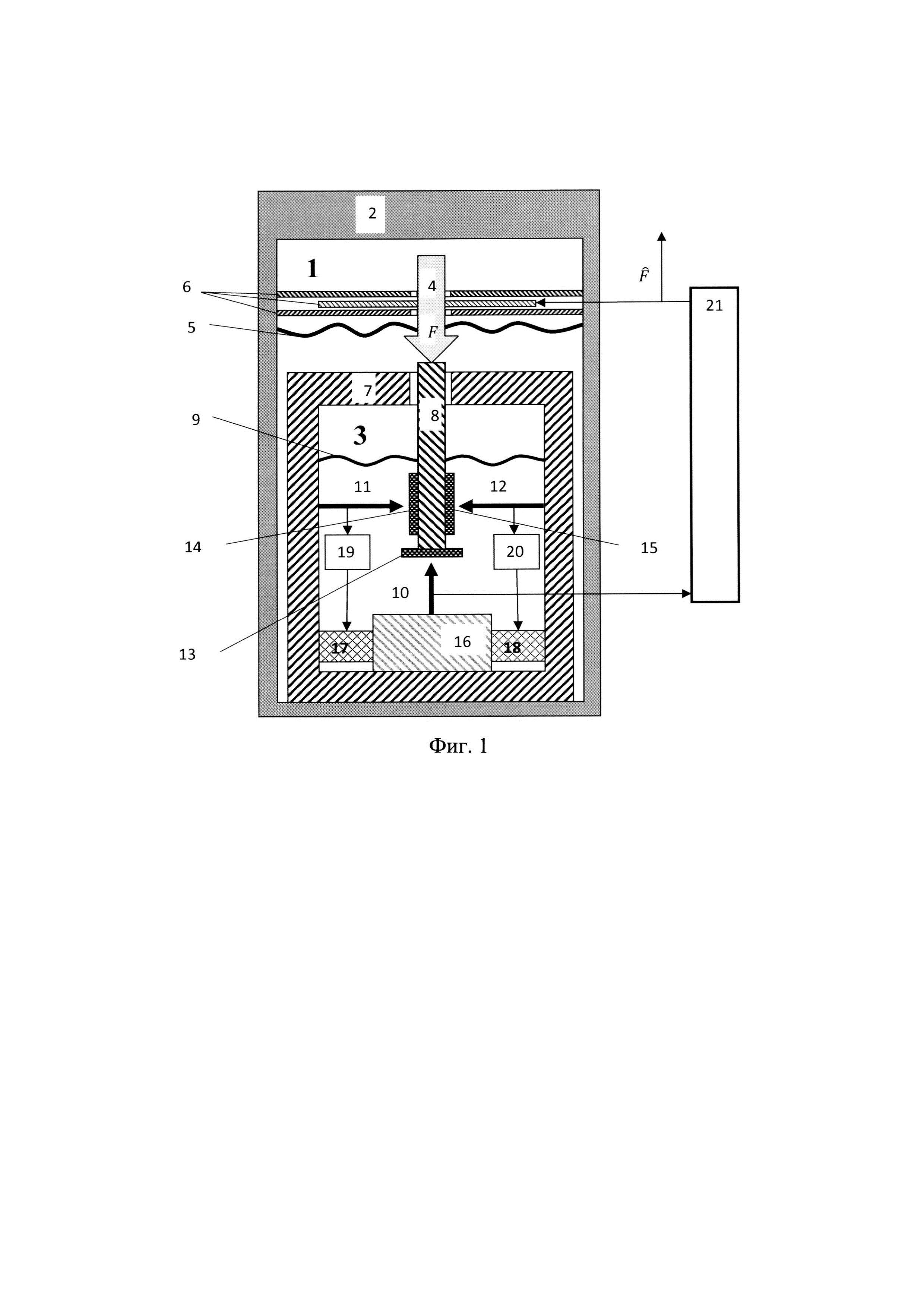
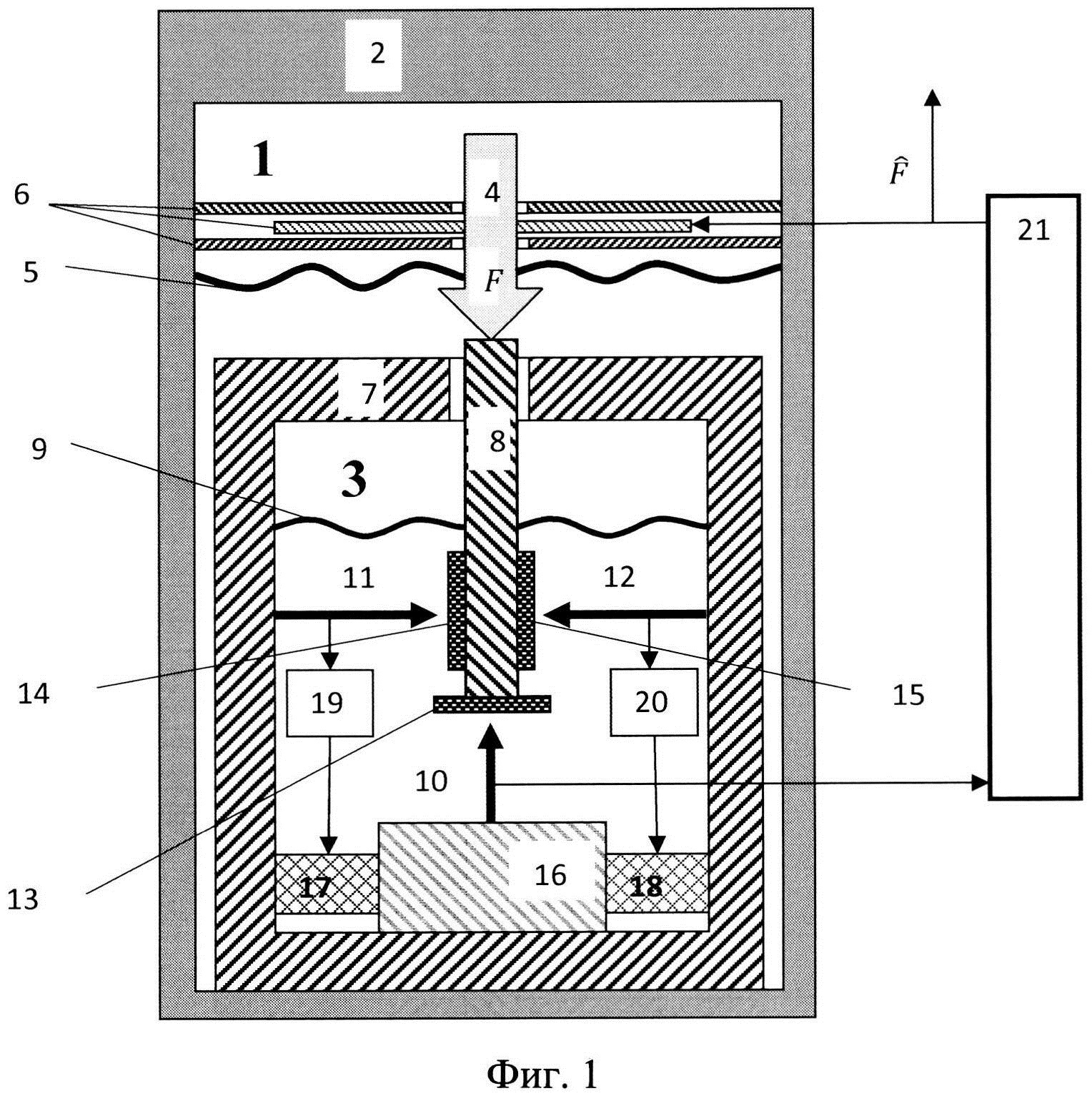
Устройство датчика перемещений и микромеханического прибора приведено на Фиг. 1. На ней изображены следующие элементы:
1 - микромеханический прибор,
2 - корпус микромеханического прибора,
3 - датчик перемещений для преобразования перемещений в электрический сигнал,
4 - пробное тело для преобразования ускорения в силу,
5 - подвес пробного тела,
6 - исполнительное устройство для преобразования электрического сигнала в силу,
7 - корпус датчика перемещений,
8 - подвижная часть датчика перемещений,
9 - подвес подвижной части датчика перемещений,
10, 11, 12 - зонды туннельных микроскопов,
13, 14, 15 - подложки туннельных микроскопов,
16 - каретка,
17, 18 - пьезоэлектрические актюаторы каретки,
19, 20 - усилители следящих систем управления кареткой,
21 - усилитель исполнительного устройства,
F,  - сила и ее измеренное значение.
- сила и ее измеренное значение.
Микромеханический прибор 1 содержит корпус 2, в котором расположены: датчик перемещений 3, пробное тело 4 в подвесе 5 и исполнительное устройство 6. В корпусе 7 датчика перемещений установлена подвижная часть 8 в подвесе 9. Подвижная часть может перемещаться в направлении действия силы F. Положение подвижной части относительно корпуса датчика перемещений измеряется с помощью туннельных микроскопов [4] с зондами 10, 11, 12 и подложками 13, 14, 15, причем с помощью основного микроскопа, содержащего зонд 10 и подложку 13, измеряется смещение в направлении действия силы. Зонда 10 установлен на каретке 16, выполненной с возможностью движения в плоскости, перпендикулярной направлению действия полезной силы. Положение каретки регулируется пьезоэлектрическими актюаторами 17, 18, управляемыми через усилители 19, 20. Управление исполнительным устройством [6] 6 осуществляется через усилитель 21. С этого же усилителя снимается информация с оценкой  действующей силы.
действующей силы.
Ускорения, возникающие при движении объекта с установленным на нем микромеханическим прибором, приводят к появлению силы F, действующей на пробное тело 4. Под действием силы пробное тело смещает подвижную часть 8 датчика перемещений. Это смещение приводит к изменению туннельного тока между зондом 10 и подложкой 13, которое усиливается на усилителе 21 и подается в виде управляющего сигнала на исполнительное устройство 6. Исполнительное устройство создает силу  компенсирующую действие силы F, приложенной к пробному телу.
компенсирующую действие силы F, приложенной к пробному телу.
В процессе эксплуатации в результате неравномерного старения материала, температурной деформации, искажения формы деталей при перегрузках и т.д. взаимное положение зонда 10 и подложки 13 изменяется в направлениях перпендикулярных действию силы. В туннельном микроскопе «поток электронов «стекает с крайнего атома на кончике иглы, образуя пучок электронов диаметром порядка 4*10-10 м» [4] и попадает на мишень подложки такого же диаметра. Чтобы не допустить сдвига пучка с мишени, необходтмо сохранять с этой точностью положение зонда 10 относительно подложки 14 в направлениях перпендикулярном потоку электронов независимо от дестабилизирующих факторов.
Туннельный микроскоп [4] преобразует перемещения порядка  в электрический ток I, экспоненциально зависящий от расстояния
в электрический ток I, экспоненциально зависящий от расстояния
I=I0e-2L,
где I0 - начальный ток.
Относительное изменение тока δI в зависимости от абсолютного изменения зазора  определится формулой
определится формулой
δI=e-2ΔL
Точность удержания зазора в туннельном микроскопе можно определить из предположения, что для срабатывания электроники достаточно изменения тока на 5% (δI=1,05). В этом случае чувствительность соответствует изменению зазора на величину

Такая чувствительность позволяет решить задачу сохранения взаимного положения зонда 10 и подложки 13 в направлениях, перпендикулярных действию силы, путем регулирования положения каретки актюаторами 17, 18.
Так как микромеханические приборы чаще всего изготавливаются из кремния, то при оценке чувствительности датчика к силе будем считать, что подвижная часть фиксируется в корпусе с помощью мембраны из кремния толщиной h=0,01 мм=10-5 м, радиусом R=5 мм=5*10-3 м.
Прогиб L мембраны, нагруженной в центре и закрепленной по окружности определяется формулами [5]

Где Р [Н] - нагрузка в центре пластины,
h [м] - толщина пластины
Е - модуль упругости, для кремния Е=2*1010 [Па],
μ=0,28 - коэффициент Пуассона
Формулу для прогиба пластины можно переписать в виде

Чувствительность датчика к силе определится выражением

Чувствительность прибора к ускорению определяется массой пробного тела по закону Ньютона. Если принять массу пробного тела m=1 г=0,001 кг, то чувствительность к ускорению а будет иметь величину

Датчик с такой чувствительностью можно устанавливать в схемы акселерометров и гироскопов. Габариты датчика в рассмотренном примере определяются диаметром диафрагмы. Однако при реализации акселерометра или гироскопа можно выполнить конструкцию датчика без собственного подвеса. В этом случае, упругий элемент может быть единым для пробной массы и подвижной части датчика и принадлежать микромеханическому прибору, а габариты датчика перемещений определяются размерами зондов и подложек туннельных микроскопов и измеряются десятыми долями миллиметра. Возможен вариант совмещения пробной массы и подвижной части датчика перемещений.
Технический эффект состоит в повышении чувствительности микромеханических приборов, уменьшении их габаритов и упрощении конструкции.
Источники информации
1. Распопов В.Я. Микромеханические приборы, М. Машиностроение. 2007.
2. Микромеханический вибрационный гироскоп. Патент РФ №2296302 от 15.11.2005. Авторы Евстифеев М.И., Несенюк Л.П., Пешехонов В.Г., Унтилов А.А. Патентообладатель: Федеральное государственное унитарное предприятие "Центральный научно-исследовательский институт "Электроприбор".
3. Пьезоэлектрический вибрационный гироскоп (варианты). Патент РФ №2426072 от 09.03.2010. Авторы: Маринушкин П.С, Левицкий А.А Патентообладатель: Федеральное государственное автономное образовательное учреждение высшего профессионального образования "Сибирский федеральный университет" (СФУ)
4. Миронов В.Л. Основы сканирующей зондовой микроскопии. РАН. Институт физики микроструктур. Нижний Новгород. 2004 г
5. Саргсян. Строительная механика П17-1 DOK. StudFiles.net>preview/3189876/page 2
6. Бобцов А.А., Бойков В.И., Быстрое С.В., Григорьев В.В. Исполнительные устройства и системы для микроперемещений. Санкт-Петербургский Государственный университет информационных технологий, механики и оптики. С-Пб, 2011.
Система определения уклонений отвесной линии
Способ абсолютных измерений гравитационного поля на подвижном объекте
Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании
Астронавигационная система
Система определения уклонений отвесной линии
Способ абсолютных измерений гравитационного поля на подвижном объекте
Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании

