Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ЗАПОРНОЙ АРМАТУРОЙ ТЕХНИКИ ОБРАБОТКИ ПОЧВЫ И РАСТЕНИЙ
Вид РИД
Изобретение
Настоящее изобретение относится к сельскому хозяйству, в частности, к системам обработки почвы и управления запорной арматурой техники, предназначенной для обработки почвы и растений гербицидами.
Наиболее близким аналогом, выбранным в качестве прототипа, является устройство для управляемой борьбы с сорняками, в котором описана система управления запорной арматурой техники обработки почвы и растений, содержащая источник ввода информации, выполненный в виде цветной камеры. Камера соединена с блоком управления, обрабатывающим поступающую информацию с применением компьютерных программ и управляющим запорной арматурой, размещенной на штанге транспортного средства, посредством электрического тока в режиме реального времени. Данное устройство описано в патенте на изобретение RU 2129785 C1, А01М 7/00, А01М 24/00, А01М 21/00 Всероссийского научно-исследовательского и проектно-технологического института механизации и электрификации сельского хозяйства, опубликованном 10.05.1999.
В связи с тем, что устройство содержит лишь одну камеру, установленную на транспортном средстве техники обработки почвы в значительном удалении от запорной арматуры, размещенной на штанге транспортного средства, скорость, обзор и качество поступающих изображений растений не позволяют проводить эффективное и оперативное управление запорной арматурой, тем самым данное устройство имеет невысокую точность внесения средств обработки растений и почвы.
Кроме того, система не учитывает ряд параметров, влияющих на качество проведения обработки почвы и растений, например, освещенность, при которой производят обработку. Также при внесении средств обработки не учитывается скорость перемещения транспортного средства и изменение высоты штанги транспортного средства относительно земли при его перемещении.
Таким образом, техническая проблема связана с созданием системы управления запорной аппаратуры техники обработки почвы и растений, позволяющей сократить расход средств обработки и снизить степень загрязнения окружающей среды за счет повышения точности внесения средств обработки.
Техническая проблема решается тем, что система управления запорной арматурой техники обработки почвы и растений, содержащая источник ввода информации, выполненный в виде цветной камеры, соединенной с блоком управления, обрабатывающим поступающую от камеры информацию с применением компьютерных программ и выполненным с возможностью управления запорной арматурой, размещенной на штанге транспортного средства, посредством электрического тока в режиме реального времени, содержит дополнительные блоки управления и источники ввода информации, представляющие собой цифровые камеры высокого разрешения, при этом блоки управления и цифровые камеры установлены на штанге транспортного средства, запорная арматура выполнена в виде пьезоэлектрических клапанов, каждый блок управления выполнен с возможностью обработки информации, поступающей от двух цифровых камер, и способен управлять одновременно пьезоэлектрическими клапанами в количестве равном или менее шестнадцати.
В частном случае осуществления изобретения система снабжена датчиком транспортного средства.
В частном случае осуществления изобретения система снабжена, по меньшей мере, одним датчиком освещенности.
В частном случае осуществления изобретения система снабжена, по меньшей мере, одним датчиком положения штанги транспортного средства.
В частном случае осуществления изобретения управление пьезоэлектрическими клапанами производится с помощью широтно-импульсной модуляции (ШИМ) путем изменения скважности импульсов при постоянной частоте.
Оснащение системы управления запорной арматурой дополнительными источниками ввода информации, размещенными на штанге транспортного средства и выполненными цифровыми и с высоким разрешением, позволяет получить качественные и точные данные о наличии растений, подлежащих обработке, и о площади, занимаемой данным растением, что позволяет повысить точность внесения средств обработки.
Снабжение системы управления запорной арматурой дополнительными блоками управления и размещение их на штанге транспортного средства позволяет оперативно обработать большой объем поступающей информации, что также способствует повышению точности внесения средств обработки.
Эффективное и оперативное управление запорной арматурой обеспечивается также тем, что в системе использованы пьезоэлектрические клапаны, позволяющие осуществлять точное и быстрое распыление средств обработки почвы и растений. Кроме того, каждый блок управления выполнен с возможностью обработки информации, поступающей от двух цифровых камер высокого разрешения, и способен управлять одновременно пьезоэлектрическими клапанами в количестве равным или менее шестнадцати, что позволяет одновременно и высокой точностью внесения гербицидов обрабатывать достаточно большую площадь, равную площади охвата двух камер.
Сущность изобретения поясняется схемой.
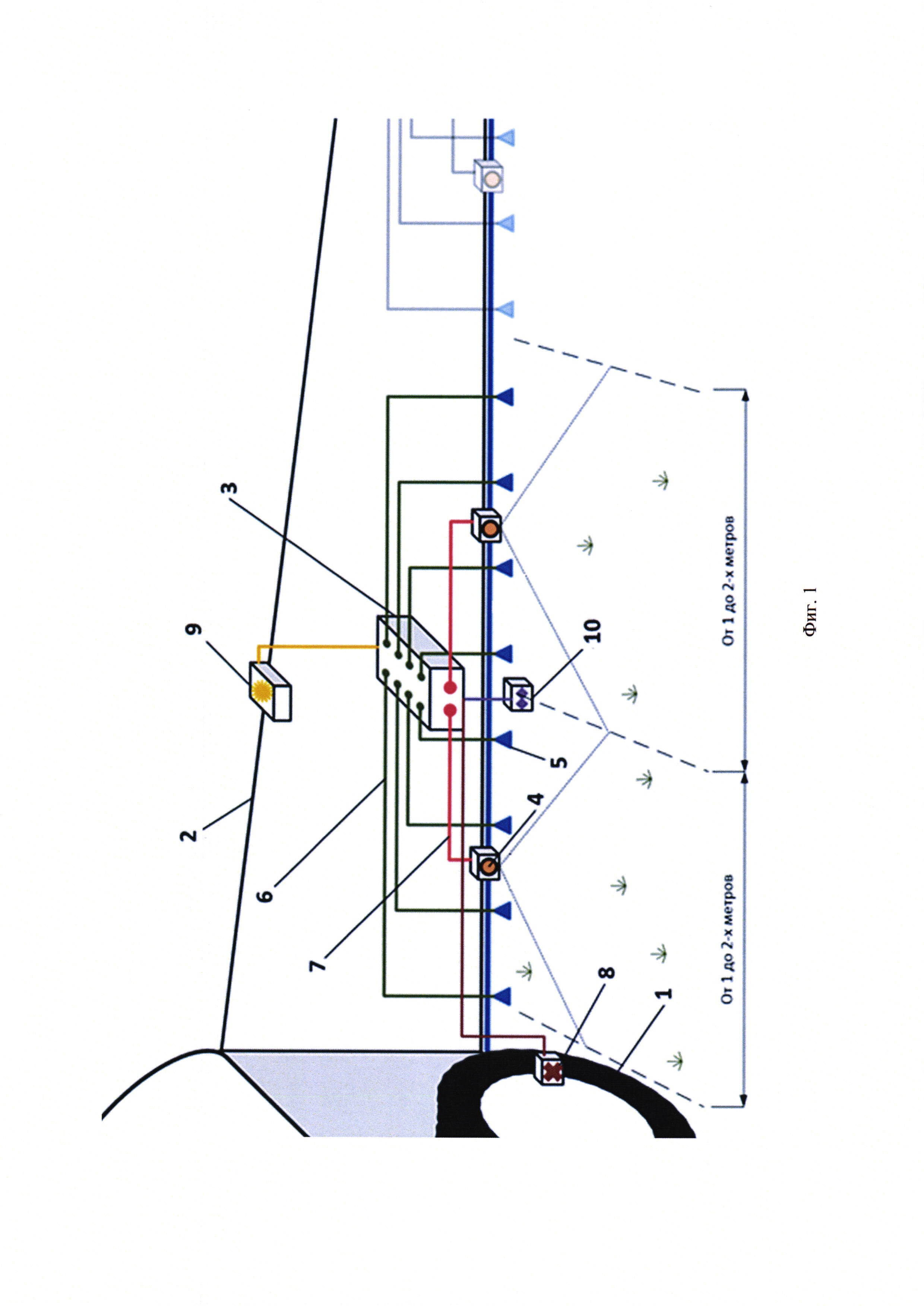
На фиг. 1 схематично изображена система управления запорной арматурой техники обработки почвы и растений.
Принцип работы системы управления запорной арматурой техники обработки почвы и растений состоит в следующем.
Систему управления запорной арматурой техники обработки почвы и растений размещают на транспортном средстве 1 со штангой 2 для возможности обработки почвы и растений. При этом блоки управления 3, а также источники ввода информации, выполненные в виде цветных цифровых камер высокого разрешения 4, и запорную арматуру, выполненную в виде пьезоэлектрических клапанов 5, размещают на штанге 2 транспортного средства 1.
Система подключается к сети электропитания техники обработки почвы и растений. В соответствующие разъемы подключаются источники ввода информации, выполненные в виде цифровых цветных камер высокого разрешения 4, кабели шины управления 6 пьезоэлектрическими клапанами 5 и шины управления 7 камерами высокого разрешения 4. После подачи напряжения на блоки управления 3 система готова к управлению запорной арматурой. В зависимости от настроек, выбранных пользователем системы, пьезоэлектрические клапаны 5 могут быть закрыты полностью или частично.
При движении транспортного средства 1, предназначенного для обработки почты и растений, камеры высокого разрешения 4 фиксируют появление обрабатываемых объектов в кадре, например, живых растений, которых на поле при обработке быть не должно. Далее информация поступает в блок управления 3, который выполнен с возможностью обработки данных от двух камер высокого разрешения 4 одновременно.
Каждый блок управления 3 с помощью компьютерных программ производит обработку поступающей от соединенных с ним цифровых камер высокого разрешения 4 информации, исследуя данные по заданным алгоритмам в соответствии с поставленной задачей. В режиме реального времени управляющий сигнал от блока управления 3 по шине управления 6 передается к пьезоэлектрическим клапанам 5 на полное или частичное их открытие для опрыскивания растений гербицидами. При этом при обработке изображения в блоке управления 3 используются многоядерные процессоры, позволяющие разбить обработку данных на отдельные потоки, в целях увеличения производительности и качества обработки изображения.
Один блок управления 3 способен управлять одновременно пьезоэлектрическими клапанами 5 в количестве равном или менее шестнадцати. При этом управление запорной арматурой электрическим током производится в диапазоне напряжений от 10 до 24 В с возможностью как включения и отключения тока, так и управления пьезоэлектрическими клапанами с помощью широтно-импульсной модуляции (ШИМ), то есть путем изменения скважности импульсов при постоянной частоте, что позволяет производить частичное или полное открытие пьезоэлектрического клапана 5, в зависимости от размера детектируемых растений или скорости транспортного средства, предназначенного для обработки почвы и растений гербицидами, что повышает точность внесения средств обработки и способствует сокращению расхода средств обработки почвы и растений.
Кроме того, программная часть системы использует обучаемую нейронную сеть для анализа поступающего изображения и управления ШИМ и пьезоэлектрическими клапанами 5.
В связи с тем, что скорость перемещения транспортного средства 1 по полю не одинакова, для более точного определения момента открытия пьезоэлектрических клапанов 5 и времени их открытия, система обработки почвы дополнительно может быть снабжена датчиком скорости 8 транспортного средства 1, выполненным с возможностью установки на колесе транспортного средства 1 и соединенным с блоком управления 3.
Систем также дополнительно может быть снабжена, по меньшей мере, одним датчиком освещенности 9, который позволяет распознавать растения при разной степени освещенности, когда цвет растения в объективе цифровой камеры высокого разрешения 4 варьируется от желтого до коричневого или фиолетового и при фиксированном заданном значении границ цвета растения, что повышает корректность срабатывания системы. Таким образом, датчик освещенности 9 измеряет интенсивность внешнего освещения, в зависимости от чего корректирует границы цветов, в которых происходит распознавание растения. Каждый блок управления 3 снабжен датчиком освещенности 9, размещенным либо рядом с блоком управления 3 на штанге 2 транспортного средства 1 в отдельном боксе и соединен с шиной блоком управления 3, либо интегрирован в блок управления 3.
Также система может быть снабжена, по меньшей мере, одним ультразвуковым датчиком 10 положения штанги 2 транспортного средства 1 относительно земли, размещенным на нижней стороне штанги на одной плоскости с клапанами 5. Датчик 10 позволяет учитывать неровности поверхности поля, из-за которых при движении транспортного средства 1 может варьироваться высота штанги 2 с пьезоэлектрическими клапанами 5. Поскольку форсунки имеют фиксированный угол факела распыла, то при изменении высоты штанги 2, изменяется площадь обработки одним пьезоэлектрическим клапаном 5. В случае, например, детектировании сорняка на границе области распыла одного из пьезоэлектрических клапанов 5 при уменьшении высоты штанги 2, могут быть задействованы соседние пьезоэлектрические клапаны 5 для повышения точности обработки.
Таким образом, использование настоящей системы позволяет достичь технического результата, заключающегося в повышении точности внесения средств обработки, что ведет к сокращению расхода средств обработки почвы и растений и снижению степени загрязнения окружающей среды.