Результат интеллектуальной деятельности: Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Вид РИД
Изобретение
Предлагаемое изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано в радиолокационной станции (РЛС) для формирования при сопровождении воздушной цели (ВЦ) из класса «самолет с турбореактивным двигателем (ТРД)» достоверной идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех.
Известен способ сопровождения в радиолокационной станции ВЦ из класса «самолет с ТРД» при воздействии уводящей по скорости помехи [1], заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса компрессора низкого давления (КНД) ее силовой установки, определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ и поступает на вход оптимального фильтра сопровождения ВЦ, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации в соответствии с уравнениями [2]






где
k=0,1, …, К, …, - номер такта работы фильтра;
P-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 и
и  - вектор текущих и экстраполированных оценок радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели;
- вектор текущих и экстраполированных оценок радиальных функционально-связанных координат взаимного перемещения носителя РЛС и воздушной цели;
Н(k+1) - матрица наблюдения;
Y(k) - вектор наблюдения;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы,
определяется отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, который поступает на вход оптимального фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от лопаток рабочего колеса первой ступени КНД и функционирующего в соответствии с процедурой (1)-(6), определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ, которая при отсутствии воздействия уводящей по скорости помехи является величиной постоянной, вычисляется модуль производной оценки разности
КНД силовой установки ВЦ, которая при отсутствии воздействия уводящей по скорости помехи является величиной постоянной, вычисляется модуль производной оценки разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ, которая сравнивается с пороговым значением ε, близким к нулю, выполнение условия
КНД силовой установки ВЦ, которая сравнивается с пороговым значением ε, близким к нулю, выполнение условия

свидетельствует об отсутствии воздействия уводящей по скорости помехи и оценка  формируется в соответствии с процедурой (1)-(6) на основе наблюдения и динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС, невыполнение условия (7) свидетельствует о воздействии уводящей по скорости помехи и оценка
формируется в соответствии с процедурой (1)-(6) на основе наблюдения и динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС, невыполнение условия (7) свидетельствует о воздействии уводящей по скорости помехи и оценка  вычисляется без наблюдения и только на основе динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС [1].
вычисляется без наблюдения и только на основе динамической модели радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС [1].
Недостатком данного способа сопровождения ВЦ является низкая достоверность оценок радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею при воздействии совместно или раздельно уводящих по скорости и дальности помех, так как данный способ не позволяет идентифицировать воздействие таких помех и скорректировать получаемые оценки.
Известен способ сопровождения ВЦ из класса «самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех [3], заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, которые поступают на вход фильтра совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой (1)-(6) оптимальной многомерной линейной дискретной калмановской фильтрации, определяется оценка разности  между оцененными значениями доплеровских частот, обусловленных отражениями от планера
между оцененными значениями доплеровских частот, обусловленных отражениями от планера  и лопаток рабочего колеса первой ступени
и лопаток рабочего колеса первой ступени  КНД силовой установки ВЦ, вычисляется модуль производной оценки разности
КНД силовой установки ВЦ, вычисляется модуль производной оценки разности  между оцененными значениями доплеровских частот, который сравнивается с пороговым значением ε, близким к нулю, выполнение или невыполнение условия
между оцененными значениями доплеровских частот, который сравнивается с пороговым значением ε, близким к нулю, выполнение или невыполнение условия

свидетельствует соответственно об отсутствии или воздействии уводящей по скорости помехи, измеряется дальность до ВЦ, в соответствии с процедурой (1)-(6) осуществляется формирование оценки дальности  , вычисляется производная оценки дальности
, вычисляется производная оценки дальности  , вычисляется дальность Д*(k+1) на основе динамической модели радиальных функционально-связанных координат взаимного перемещения носителя радиолокационной станции и ВЦ, вычисляется модуль разности между оценкой производной дальности
, вычисляется дальность Д*(k+1) на основе динамической модели радиальных функционально-связанных координат взаимного перемещения носителя радиолокационной станции и ВЦ, вычисляется модуль разности между оценкой производной дальности  и оценкой скорости
и оценкой скорости  , величина которого сравнивается с порогом ε1,
, величина которого сравнивается с порогом ε1,

где  - оценка скорости, сформированная на основе измерения скорости Y(k+1)=[V(k+1)]T и динамической модели радиальных функционально-связанных координат, вычисляется модуль разности между оценкой дальностью
- оценка скорости, сформированная на основе измерения скорости Y(k+1)=[V(k+1)]T и динамической модели радиальных функционально-связанных координат, вычисляется модуль разности между оценкой дальностью  и вычисленной дальностью Д*(k+1) на основе динамической модели радиальных функционально-связанных координат, величина которого сравнивается с порогом ε2,
и вычисленной дальностью Д*(k+1) на основе динамической модели радиальных функционально-связанных координат, величина которого сравнивается с порогом ε2,

одновременное выполнение условий (8) и (10) свидетельствует об отсутствии уводящих по скорости и дальности помех, в этом случае оценки дальности  и скорости
и скорости  формируются в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат, одновременное выполнение условия (8) и невыполнение условия (10) свидетельствует о воздействии только уводящей по дальности помехи, в этом случае оценка скорости
формируются в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[Д(k+1), V(k+1)]T и динамической модели радиальных функционально-связанных координат, одновременное выполнение условия (8) и невыполнение условия (10) свидетельствует о воздействии только уводящей по дальности помехи, в этом случае оценка скорости  формируется в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат, а оценка дальности
формируется в соответствии с процедурой (1)-(6) на основе наблюдения Y(k+1)=[V(k+1)] и динамической модели радиальных функционально-связанных координат, а оценка дальности  вычисляется без учета измерения дальности путем интегрирования оценки скорости
вычисляется без учета измерения дальности путем интегрирования оценки скорости  , одновременное невыполнение условия (8) и выполнение условия (10) свидетельствует о воздействии уводящих по дальности и скорости помех с функционально-связанным законом увода, в этом случае оценки дальности
, одновременное невыполнение условия (8) и выполнение условия (10) свидетельствует о воздействии уводящих по дальности и скорости помех с функционально-связанным законом увода, в этом случае оценки дальности  и скорости
и скорости  вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат, одновременное невыполнение условий (9) и (10) свидетельствует о воздействии уводящих по дальности и скорости помех без функционально-связанного закона увода, в этом случае оценки дальности
вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат, одновременное невыполнение условий (9) и (10) свидетельствует о воздействии уводящих по дальности и скорости помех без функционально-связанного закона увода, в этом случае оценки дальности  и скорости
и скорости  также вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат, одновременное невыполнение условия (8) и выполнение условия (10) свидетельствует о воздействии только уводящей по скорости помехи, в этом случае оценки дальности
также вычисляются в соответствии с процедурой (1)-(6) без учета измерений дальности и скорости Y(k+1)=0 и только на основе динамической модели радиальных функционально-связанных координат, одновременное невыполнение условия (8) и выполнение условия (10) свидетельствует о воздействии только уводящей по скорости помехи, в этом случае оценки дальности  и скорости
и скорости  формируются в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат.
формируются в соответствии с процедурой (1)-(6) на основе измерения только дальности Y(k+1)=[Д(k+1)] и динамической модели радиальных функционально-связанных координат.
Недостатком данного способа сопровождения ВЦ является низкая достоверность идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия такого воздействия и оценки радиальных функционально-связанных координат взаимного перемещения ВЦ и носителя РЛС при различных вариантах воздействия таких помех вследствие:
1. Не оптимальности, определяемых на его основе оценок функционально-связанных координат, так как они находятся при условии справедливости гипотезы о фактическом варианте воздействия уводящих помех, которая носит вероятностный характер, а значит, оценки являются условно-оптимальными.
2. Отсутствия возможности комплексирования информации РЛС, измеряющей функционально-связанные координаты, и индикатора (обнаружителя) варианта воздействия уводящих помех.
3. Отсутствия возможности учитывать априорные данные о смене варианта воздействия уводящих помех.
4. Отсутствия адаптации системы наблюдения к различным вариантам воздействия уводящих помех.
Цель изобретения - повышение достоверности идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею путем приближения получаемых оценок к их оптимальным значениям за счет комплексирования информации РЛС и индикатора варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
Для достижения цели в способе сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех, заключающемся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся лопаток рабочего колеса КНД ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, выделенные отсчеты доплеровских частот дополнительно поступают на вход многоканального фильтра совместного сопровождения воздушной цели и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы












основанной на априорных данных в виде математической модели системы «воздушная цель - радиолокационная станция - индикатор» со случайной скачкообразной структурой, включающей модели линейной динамики радиальных функционально-связанных координат взаимного перемещения носителя радиолокационной станции и воздушной цели

их измерений в радиолокационной станции

смены варианта воздействия уводящих помех

индикатора варианта воздействия уводящих помех

неуправляемых случайных возмущений и помех

при начальных условиях

где
k - дискретный момент времени;
xk - вектор радиальных функционально-связанных координат взаимного перемещения носителя радиолокационной станции и ВЦ;
 - вариант воздействия уводящих помех (1 - отсутствие помех; 2 - воздействие только уводящей по скорости помехи; 3 - воздействие только уводящей по дальности помехи; 4 - воздействие уводящих как по скорости, так и по дальности помех);
- вариант воздействия уводящих помех (1 - отсутствие помех; 2 - воздействие только уводящей по скорости помехи; 3 - воздействие только уводящей по дальности помехи; 4 - воздействие уводящих как по скорости, так и по дальности помех);
zk - вектор измерений РЛС;
 - выходные показания индикатора варианта воздействия уводящих помех;
- выходные показания индикатора варианта воздействия уводящих помех;
qk(sk+1|sk) - условные вероятности смены варианта воздействия уводящих помех;
πk+1(rk+1|rk,sk+1) - условные вероятности смены показаний индикатора варианта воздействия уводящих помех;
 - прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности воздействия уводящих помех по sk+1 варианту, условные математические ожидания функционально-связанных координат при фиксированном варианте воздействия уводящих помех, условные ковариационные матрицы ошибок оценивания функционально-связанных координат при фиксированном варианте воздействия уводящих помех;
- прогнозируемые на один шаг дискретности вперед и апостериорные соответственно вероятности воздействия уводящих помех по sk+1 варианту, условные математические ожидания функционально-связанных координат при фиксированном варианте воздействия уводящих помех, условные ковариационные матрицы ошибок оценивания функционально-связанных координат при фиксированном варианте воздействия уводящих помех;
 - квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта воздействия уводящих помех;
- квазиоптимальная по критерию максимума апостериорной вероятности оценка варианта воздействия уводящих помех;
 - апостериорное безусловное математическое ожидание функционально-связанных координат;
- апостериорное безусловное математическое ожидание функционально-связанных координат;
 - апостериорная безусловная ковариационная матрица ошибок оценивания функционально-связанных координат;
- апостериорная безусловная ковариационная матрица ошибок оценивания функционально-связанных координат;
Gk, Qk - ковариационные матрицы соответственно векторов шумов возбуждения Fkξk и помех Еk(sk)ζk;
ξk, ζk - стандартные дискретные векторные белые шумы;
Θk(sk) - условная ковариационная матрица измерения при фиксированном варианте воздействия уводящих помех;
Ak, Fk - известные матрицы коэффициентов;
Ck(sk), Ek(sk) - известные матрицы детерминированных функций от варианта воздействия уводящих помех sk;
 - обратная матрица по отношению к матрице Θk(sk);
- обратная матрица по отношению к матрице Θk(sk);
Т - операция транспонирования матрицы;
detΘk(sk) - определитель матрицы Θk(sk);
ехр[⋅] - экспоненциальная функция,
определяется оценка  варианта воздействия уводящих помех, определяется оценка
варианта воздействия уводящих помех, определяется оценка  безусловного математического ожидания функционально-связанных координат, определяется оценка
безусловного математического ожидания функционально-связанных координат, определяется оценка  безусловной ковариационной матрицы ошибок оценивания функционально-связанных координат, на основе математической модели (24) динамики радиальных функционально-связанных координат, включающих дальность до цели, планерные и компрессорные составляющие радиальных скоростей и ускорений взаимного перемещения носителя радиолокационной станции и ВЦ, в непрерывном времени
безусловной ковариационной матрицы ошибок оценивания функционально-связанных координат, на основе математической модели (24) динамики радиальных функционально-связанных координат, включающих дальность до цели, планерные и компрессорные составляющие радиальных скоростей и ускорений взаимного перемещения носителя радиолокационной станции и ВЦ, в непрерывном времени







где индексы «п» и «к» относятся соответственно к планерной и первой компрессорной составляющим спектра, отраженного от ВЦ сигнала;
D(t), Vсбл(t), aп(t) - радиальные функционально-связанные координаты соответственно дальность, скорость и ускорение сближения носителя РЛС с воздушной целью;
Vп(t), Vк(t) - детерминированные составляющие радиальных скоростей сближения носителя РЛС с воздушной целью;
ΔVп(t), ΔVк(t) - флюктуационные составляющие радиальных скоростей сближения носителя РЛС с воздушной целью;
a п(t), aк(t) - флюктуационные составляющие радиальных ускорений;
αп, αк, - величины, обратные времени корреляции скоростных флюктуаций взаимного перемещения носителя РЛС и воздушной цели;
βп, βк - квадраты собственных частот скоростных флюктуаций взаимного перемещения носителя РЛС и воздушной цели;
σп, σк - среднеквадратические отклонения флюктуаций ускорения взаимного перемещения носителя РЛС и воздушной цели;
nп(t), nк(t) - формирующие нормированные белые гауссовские шумы;
D0, Vп0, Vк0, ΔVп0, ΔVк0, aп0, ак0 - начальные значения соответственно дальности до ВЦ, детерминированных и флюктуационных составляющих радиальных скоростей, флюктуационных составляющих радиальных ускорений, представляемой в процедуре (11)-(23) матрицами Ak и, Fk, размерностями 7×7, ненулевыми элементами которых являются соответственно
а
11=а22=а33=а55=a66=1; a12=a13=-Δt; а34=а67=Δt; a44=1-αпΔt; a77=1-αкΔt; a43=-βпΔt; a76=-βкΔt;  где Δt - период дискретизации, и на основе математической модели (25) измерений в радиолокационной станции функционально-связанных координат, представляемой в процедуре (11)-(23) матрицами Ck(sk) и Ek(sk), размерностями 7×7, ненулевыми элементами которых являются соответственно c11(sk); c22(sk); c33(sk); с55; с66; e11(sk); e22(sk); e33(sk); e55; e66, при отсутствии помех спрогнозированные на основе априорных данных (30)-(36) функционально-связанные координаты корректируются по результатам измерений D(t), Vп(t), ΔVп(t), Vк(t), ΔVк(t) и с11(1)=с11, c22(1)=c22, с33(1)=с33; e11(1)=e11, e22(1)=e22, e33(1)=e33, при воздействии только уводящей по скорости помехи корректируются по результатам измерений D(t),
где Δt - период дискретизации, и на основе математической модели (25) измерений в радиолокационной станции функционально-связанных координат, представляемой в процедуре (11)-(23) матрицами Ck(sk) и Ek(sk), размерностями 7×7, ненулевыми элементами которых являются соответственно c11(sk); c22(sk); c33(sk); с55; с66; e11(sk); e22(sk); e33(sk); e55; e66, при отсутствии помех спрогнозированные на основе априорных данных (30)-(36) функционально-связанные координаты корректируются по результатам измерений D(t), Vп(t), ΔVп(t), Vк(t), ΔVк(t) и с11(1)=с11, c22(1)=c22, с33(1)=с33; e11(1)=e11, e22(1)=e22, e33(1)=e33, при воздействии только уводящей по скорости помехи корректируются по результатам измерений D(t),  ,
,  , Vк(t), ΔVк(t) и с11(2)=с11,
, Vк(t), ΔVк(t) и с11(2)=с11,  ,
,  ; е11(2)=е11,
; е11(2)=е11,  ,
,  , при воздействии только уводящей по дальности помехи корректируются по результатам измерений D*(t), Vп(t), ΔVп(t), Vк(t), ΔVк(t) и
, при воздействии только уводящей по дальности помехи корректируются по результатам измерений D*(t), Vп(t), ΔVп(t), Vк(t), ΔVк(t) и  , c22(3)=c22, с33(3)=с33;
, c22(3)=c22, с33(3)=с33;  , e22(3)=e22, e33(3)=e33, при воздействии уводящих как по скорости, так и по дальности помех корректируются по результатам измерений D*(t),
, e22(3)=e22, e33(3)=e33, при воздействии уводящих как по скорости, так и по дальности помех корректируются по результатам измерений D*(t),  ,
,  , Vк(t), ΔVк(t) и
, Vк(t), ΔVк(t) и  ,
,  ,
,  ;
;  ,
,  ,
,  .
.
Новыми признаками, обладающими существенными отличиями, являются:
1. Применение многоканального фильтра совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой (11)-(23) квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы, вместо фильтра сопровождения ВЦ, функционирующего в соответствии с процедурой (1)-(6) многомерной линейной дискретной калмановской фильтрации.
2. Учет априорных данных о смене варианта воздействия уводящих помех в виде условных вероятностей переходов (26).
3. Комплексирование информации РЛС, измеряющей функционально-связанные координаты, и индикатора (обнаружителя) варианта воздействия уводящих помех с моделью (27).
4. Коррекция оценок функционально-связанных координат, полученных на основе динамической модели (24), при совместном воздействии уводящих по дальности и скорости помех по результатам скорректированных на основе альтернативных моделей (25) измерений (адаптация системы наблюдения к различным вариантам воздействия уводящих помех).
5. Прогнозирование (11) вероятностей  воздействия уводящих помех по каждому варианту на один шаг дискретности вперед на основе априорных данных о смене вариантов воздействия уводящих помех, представленных соответственно начальными (29) и переходными (26) вероятностями цепи Маркова.
воздействия уводящих помех по каждому варианту на один шаг дискретности вперед на основе априорных данных о смене вариантов воздействия уводящих помех, представленных соответственно начальными (29) и переходными (26) вероятностями цепи Маркова.
6. Прогнозирование (12) на один шаг дискретности вперед условных математических ожиданий  функционально-связанных координат
функционально-связанных координат
при фиксированном варианте воздействия уводящих помех с учетом найденных вероятностей на основе априорных данных о смене вариантов воздействия уводящих помех (26) и динамике функционально-связанных координат (24).
7. Прогнозирование (13) на один шаг дискретности вперед условных ковариационных матриц  ошибок оценивания функционально-связанных координат при фиксированном варианте воздействия уводящих помех с учетом найденных вероятностей (11) и математических ожиданий (12).
ошибок оценивания функционально-связанных координат при фиксированном варианте воздействия уводящих помех с учетом найденных вероятностей (11) и математических ожиданий (12).
8. Оценка (14) апостериорных вероятностей  воздействия уводящих помех по каждому варианту, по степени согласованности (17)-(20) спрогнозированных вероятностей (11), математических ожиданий (12) функционально-связанных координат и ковариационных матриц (13) ошибок их оценивания с результатами измерений (25) и показаниями индикатора (27), представленной функцией правдоподобия.
воздействия уводящих помех по каждому варианту, по степени согласованности (17)-(20) спрогнозированных вероятностей (11), математических ожиданий (12) функционально-связанных координат и ковариационных матриц (13) ошибок их оценивания с результатами измерений (25) и показаниями индикатора (27), представленной функцией правдоподобия.
9. Оценка (15) условных апостериорных математических ожиданий  функционально-связанных координат для каждой альтернативной модели измерения (25), соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных математических ожиданий (12) и ковариационных матриц (13) ошибок прогноза с учетом результатов измерения (25).
функционально-связанных координат для каждой альтернативной модели измерения (25), соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных математических ожиданий (12) и ковариационных матриц (13) ошибок прогноза с учетом результатов измерения (25).
10. Оценка (16) условных апостериорных ковариационных матриц  ошибок оценивания функционально-связанных координат для каждой альтернативной модели измерения (25), соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных ковариационных матриц (13) ошибок прогноза с учетом результатов измерения (25).
ошибок оценивания функционально-связанных координат для каждой альтернативной модели измерения (25), соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных ковариационных матриц (13) ошибок прогноза с учетом результатов измерения (25).
11. Идентификация (21) такого  варианта воздействия уводящих помех, для которого найденная апостериорная вероятность окажется больше.
варианта воздействия уводящих помех, для которого найденная апостериорная вероятность окажется больше.
12. Нахождение безусловной оценки  функционально-связанных координат на основе апостериорных вероятностей (14) воздействия уводящих помех по каждому варианту и условных апостериорных оценок (15) функционально-связанных координат, как безусловного математического ожидания (22).
функционально-связанных координат на основе апостериорных вероятностей (14) воздействия уводящих помех по каждому варианту и условных апостериорных оценок (15) функционально-связанных координат, как безусловного математического ожидания (22).
13. Нахождение (23) безусловной ковариационной матрицы  ошибок оценивания функционально-связанных координат с учетом найденных апостериорных вероятностей (14) воздействия уводящих помех по каждому варианту, условных математических ожиданий функционально-связанных координат (15), условных ковариационных матриц (16) ошибок их оценивания и безусловных оценок функционально-связанных координат (22).
ошибок оценивания функционально-связанных координат с учетом найденных апостериорных вероятностей (14) воздействия уводящих помех по каждому варианту, условных математических ожиданий функционально-связанных координат (15), условных ковариационных матриц (16) ошибок их оценивания и безусловных оценок функционально-связанных координат (22).
Данные признаки являются существенными и в совокупности в известных технических решениях не обнаружены.
Применение всех новых существенных признаков позволит идентифицировать совместное или раздельное воздействие уводящих по дальности и скорости помех с одновременным формированием достоверных безусловных оценок дальности до воздушной цели и скорости сближения носителя РЛС с нею при комплексировании информации РЛС и индикатора (обнаружителя) варианта воздействия уводящих помех, учете априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
На фиг. 1 приведена блок-схема, поясняющая реализацию предлагаемого способа сопровождения воздушной цели при воздействии уводящих по дальности и скорости помех.
Способ сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех осуществляется следующим образом.
На вход известного блока 1 БПФ [3], на промежуточной частоте с выхода приемника РЛС поступает сигнал S(t), отраженный от ВЦ, который подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой ВЦ и вращающихся частей КНД ее силовой установки.
В известном формирователе 2 измерения [3], во-первых, определяется отсчет доплеровской частоты Fп(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера ВЦ, во-вторых, данный отсчет доплеровской частоты преобразуется в значение скорости, как Vп(k+1)=λFп(k+1)/2 (где λ - рабочая длина волны РЛС), в-третьих, поступающее на вход измерение дальности в непрерывном времени D(t) преобразуется в дискретные отсчеты дальности D(k+1), в-четвертых, определяется отсчет доплеровской частоты Fк(k+1), соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящейся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера ВЦ, в-пятых, данный отсчет доплеровской частоты преобразуется в значение скорости, как Vк(k+1)=λFк(k+1)/2.
В результате на выходе блока 2 формируется измерение zk+1=(D(k+1), Vп(k+1), Vк(k+1))T, которое поступает на вход многоканального фильтра 9 совместного сопровождения ВЦ и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с известной процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы (11)-(23), структурная схема которой и описание приводятся в [4], работающего на основе априорных данных (24)-(29) в виде математической модели системы «воздушная цель - радиолокационная станция - индикатор» со случайной скачкообразной структурой, включающей (блок 10 памяти бортовой ЦВМ) модель линейной динамики радиальных функционально-связанных координат 3 взаимного перемещения носителя радиолокационной станции и воздушной цели, представленной матрицами (Ak, Fk), модель измерений функционально-связанных координат в радиолокационной станции 4, представленной матрицами (Ck(sk), Ek(sk)), модель смены варианта воздействия уводящих помех 5, представленной переходными вероятностями qk(⋅), индикатора варианта воздействия уводящих помех 6, представленной переходными вероятностями πk+1(⋅), модель неуправляемых случайных возмущений и помех 7 при начальных условиях 8, также поступающих на вход многоканального фильтра 9.
Сформированные на выходе многоканального фильтра 9 оценки  варианта воздействия уводящих помех, безусловного математического ожидания
варианта воздействия уводящих помех, безусловного математического ожидания  функционально-связанных координат взаимного перемещения ВЦ
функционально-связанных координат взаимного перемещения ВЦ
и носителя РЛС при совместном или раздельном воздействии уводящих по дальности и скорости помех или при отсутствии их воздействия, безусловной ковариационной матрицы  ошибок оценивания функционально-связанных координат поступают на выход канала сопровождения воздушной цели в РЛС.
ошибок оценивания функционально-связанных координат поступают на выход канала сопровождения воздушной цели в РЛС.
Результаты сравнительного моделирования предлагаемого способа сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех на основе многоканального фильтра совместного сопровождения воздушной цели
и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы, и известного способа сопровождения ВЦ из класса «самолет с ТРД» при воздействии уводящих по дальности и скорости помех [3] на основе процедуры многомерной линейной дискретной калмановской фильтрации свидетельствуют с доверительной вероятностью 0,95 о снижении среднеквадратического отклонения ошибки фильтрации до 16% и о повышении вероятности правильной идентификации варианта воздействия уводящих помех до 10%.
Таким образом, применение предлагаемого способа позволит повысить достоверность идентификации совместного или раздельного воздействия уводящих по дальности и скорости помех или отсутствия их воздействия и оценки радиальных функционально-связанных дальности до воздушной цели и скорости сближения носителя РЛС с нею путем приближения получаемых оценок к их оптимальным значениям за счет комплексирования информации РЛС и индикатора варианта воздействия уводящих помех, учета априорных данных о смене этих вариантов и адаптации системы наблюдения к ним.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Богданов А.В., Закомолдин Д.В., Новичёнок И.А. Способ сопровождения воздушной цели из класса «Самолет с турбореактивным двигателем» при воздействии уводящей по скорости помехи. Патент на изобретение №2575383, 2016 (аналог).
2. Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. - Л.: изд. Ленинградского университета, 1985, страницы 150, 151 (аналог).
3. Богданов А.В., Васильев О.В., Докучаев Я.С. Способ сопровождения воздушной цели из класса «Самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех. Патент на изобретение №2665031, 2018 (прототип).
4. Бухалев В.А. Оптимальное сглаживание в системах со случайной скачкообразной структурой / В.А. Бухалев. - М.: ФИЗМАТЛИТ, 2013, стр. 117-120.
Способ сопровождения в радиолокационной станции воздушной цели из класса «самолет с турбореактивным двигателем» при воздействии уводящих по дальности и скорости помех, заключающийся в том, что сигнал, отраженный от цели, подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, составляющие которого обусловлены отражениями сигнала от планера сопровождаемой воздушной цели и вращающихся лопаток рабочего колеса компрессора низкого давления ее силовой установки, определяются отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, который соответствует его отражениям от планера воздушной цели, и отсчет доплеровской частоты, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера воздушной цели, отличающийся тем, что выделенные отсчеты доплеровских частот поступают на вход многоканального фильтра совместного сопровождения воздушной цели и первой компрессорной составляющей спектра сигнала, функционирующего в соответствии с процедурой квазиоптимальной совместной фильтрации фазовых координат и распознавания состояния марковской структуры линейной стохастической динамической системы, основанной на априорных данных в виде математической модели системы «воздушная цель - радиолокационная станция - индикатор» со случайной скачкообразной структурой, включающей модели линейной динамики радиальных функционально-связанных координат взаимного перемещения носителя радиолокационной станции и воздушной цели, их измерений в радиолокационной станции, смены варианта воздействия уводящих помех, индикатора варианта воздействия уводящих помех, неуправляемых случайных возмущений и помех, при начальных условиях, на основе априорных данных о смене вариантов воздействия уводящих помех, представленных соответственно начальными и переходными вероятностями цепи Маркова, прогнозируются вероятности воздействия уводящих помех по каждому варианту на один шаг дискретности вперед, с учетом найденных вероятностей на основе априорных данных о смене вариантов воздействия уводящих помех и динамике функционально-связанных координат взаимного перемещения носителя радиолокационной станции и воздушной цели прогнозируются на один шаг дискретности вперед условные математические ожидания функционально-связанных координат при фиксированном варианте воздействия уводящих помех, с учетом найденных вероятностей и математических ожиданий прогнозируются на один шаг дискретности вперед условные ковариационные матрицы ошибок оценивания функционально-связанных координат при фиксированном варианте воздействия уводящих помех, по степени согласованности спрогнозированных вероятностей, математических ожиданий функционально-связанных координат и ковариационных матриц ошибок их оценивания с результатами измерений и показаниями индикатора, представленной функцией правдоподобия, осуществляется оценка апостериорных вероятностей воздействия уводящих помех по каждому варианту, для каждой альтернативной модели измерения, соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных математических ожиданий и ковариационных матриц ошибок прогноза с учетом результатов измерения находятся условные апостериорные математические ожидания функционально-связанных координат взаимного перемещения носителя радиолокационной станции и воздушной цели, для каждой альтернативной модели измерения, соответствующей различным вариантам воздействия уводящих помех, на основе спрогнозированных ковариационных матриц ошибок прогноза с учетом результатов измерения находятся условные апостериорные ковариационные матрицы ошибок оценивания функционально-связанных координат, из возможных вариантов воздействия уводящих помех выбирается тот, для которого найденная апостериорная вероятность окажется больше, безусловная оценка функционально-связанных координат вычисляется на основе апостериорных вероятностей воздействия уводящих помех по каждому варианту и условных апостериорных оценок функционально-связанных координат, как безусловное математическое ожидание, с учетом найденных апостериорных вероятностей воздействия уводящих помех по каждому варианту, условных математических ожиданий функционально-связанных координат, условных ковариационных матриц ошибок их оценивания и безусловных оценок функционально-связанных координат находится безусловная ковариационная матрица ошибок оценивания функционально-связанных координат.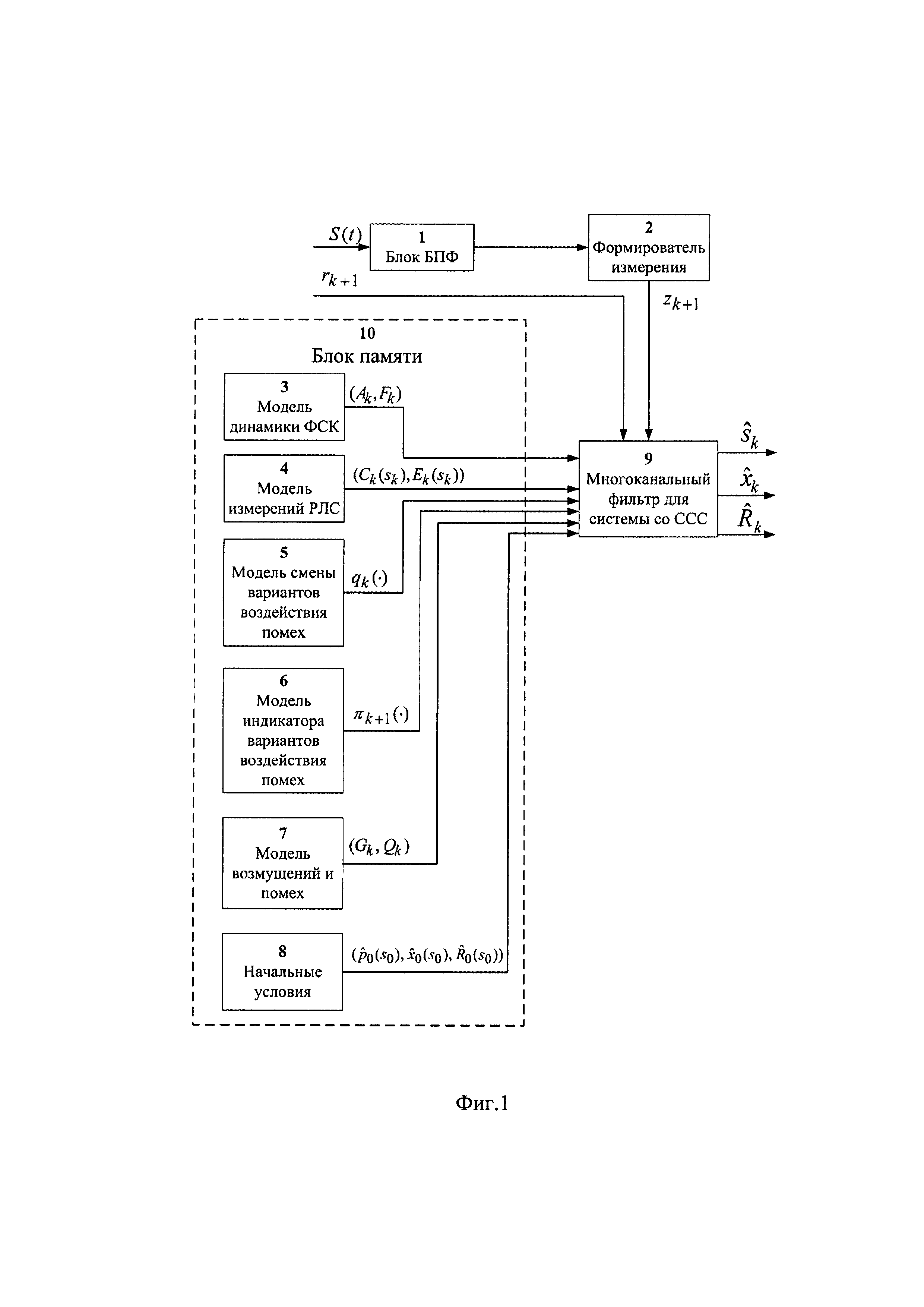
Модуль типовых авиационных интерфейсов
Система управления оружием летательного аппарата
Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый"
Биорезорбируемая барьерная мембрана на основе полисахарида для направленной регенерации костной ткани
Способ поражения площадной цели групповым действием суббоеприпасов кассетных боеприпасов
Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала
Способ получения индивидуального композиционного имплантата на основе альгината натрия и фосфатов кальция для замещения костно-хрящевых дефектов методом трехмерной гелевой печати
Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый"
Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех
Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех
Способ динамической юстировки систем координат вертолета на основе их векторного согласования
Способ комплексирования информации при определении направления беспилотного летательного аппарата на воздушный объект и величины предполагаемого промаха

