Результат интеллектуальной деятельности: Электропривод
Вид РИД
Изобретение
Изобретение относится к электромеханике, а именно к электроприводам с эталонной моделью и с пропорционально-интегрально-дифференциальным регулятором, и может быть использовано в прецизионных электромеханических системах с высокими динамическими характеристиками.
Технический результат заключается в улучшении динамических характеристик при сохранении высокой точности благодаря компенсации действия статического момента исполнительного механизма.
Известно техническое решение по патенту РФ №2027211 [Лащев А.Я. Самонастраивающаяся система управления с эталонной моделью, МПК G05B 13/00, 20.01.1995]. Сущность заключается в том, что система содержит объект управления, эталонную модель, два блока настройки параметров, два блока с переменными коэффициентами усиления и два блока сравнения. Блоки усиления включены в прямой канал управления и в канал обратной связи. Выходные сигналы объекта управления и эталонной модели сравниваются вторым блоком сравнения, и разность поступает на блоки настройки параметров, определяющих коэффициенты блоков усиления. Недостатком известного технического решения является пропорциональный закон управления, не обеспечивающий высокое качество переходного процесса.
Известно техническое решение по патенту РФ №1663713 [Афанасьев А.Ю. Следящий моментный электропривод, МПК Н02К 26/00, Н02Р 6/02, 5/06, 15.07.1991]. Сущность заключается в том, что электропривод содержит моментный электродвигатель, объект управления, датчики угла и частоты вращения, задатчик угла и частоты вращения, предварительный усилитель, интегратор и три сумматора. На выходе второго сумматора формируется сигнал, пропорциональный требуемому угловому ускорению ротора двигателя, а на выходе третьего сумматора - сигнал, пропорциональный требуемому электромагнитному моменту. Недостатком известного технического решения является необходимость формирования входного сигнала, пропорционального требуемой частоте вращения, а также наличие тахогенератора.
Наиболее близким к заявляемому техническому решению по наибольшему количеству совпадающих признаков и достигаемому техническому результату, выбранным заявителем в качестве прототипа, является изобретение по патенту РФ №2574283 [Пинигин К.Ю. Самонастраивающаяся система управления с градиентной адаптацией регулятора состояния, МПК G05B 13/02, 10.02.2016]. Сущность заключается в том, что система имеет входной сумматор, объект управления, блок эталонной модели, регулятор состояния, выходной сумматор и блок алгоритма настройки. Выходной сумматор выдает разность сигналов объекта управления и эталонной модели, которая используется блоком алгоритма настройки. Недостатком известного технического решения является сложность алгоритма настройки и низкая точность при наличии статического момента объекта управления.
Технический результат, на достижение которого направлено предлагаемое изобретение, является упрощение электропривода и улучшение динамических свойств электропривода при высокой точности слежения и наличии статического момента объекта управления.
Технический результат достигается тем, что в электроприводе, содержащем основной электропривод с входным сумматором, эталонную модель и выходной сумматор, инвертирующий вход которого соединен с выходом основного электропривода, а неинвертирующий вход - с выходом эталонной модели, неинвертирующий вход входного сумматора соединен со входом электропривода, основной электропривод содержит пропорциональное и дифференцирующее звенья, подключенные к выходу входного сумматора, выходы которых подключены к первому, второму входам второго сумматора, соединенного последовательно с усилителем мощности и электродвигателем, механически связанным с объектом управления и датчиком угла, выход которого подключен ко второму инвертирующему входу входного сумматора, эталонная модель содержит третий сумматор, первый вход которого соединен с входом электропривода, а выход подключен ко входам моделей пропорционального и дифференцирующего звеньев, выходы которых подключены к первому, второму входам четвертого сумматора, соединенного последовательно с моделями усилителя мощности и электродвигателя, связанных с моделями объекта управления и датчика угла, выход которого подключен ко второму инвертирующему входу третьего сумматора, введен интегратор, вход которого подключен к выходу выходного сумматора, а выход подключен к третьему входу второго сумматора.
Предлагаемое техническое решение объясняется с помощью фиг. 1-5, где
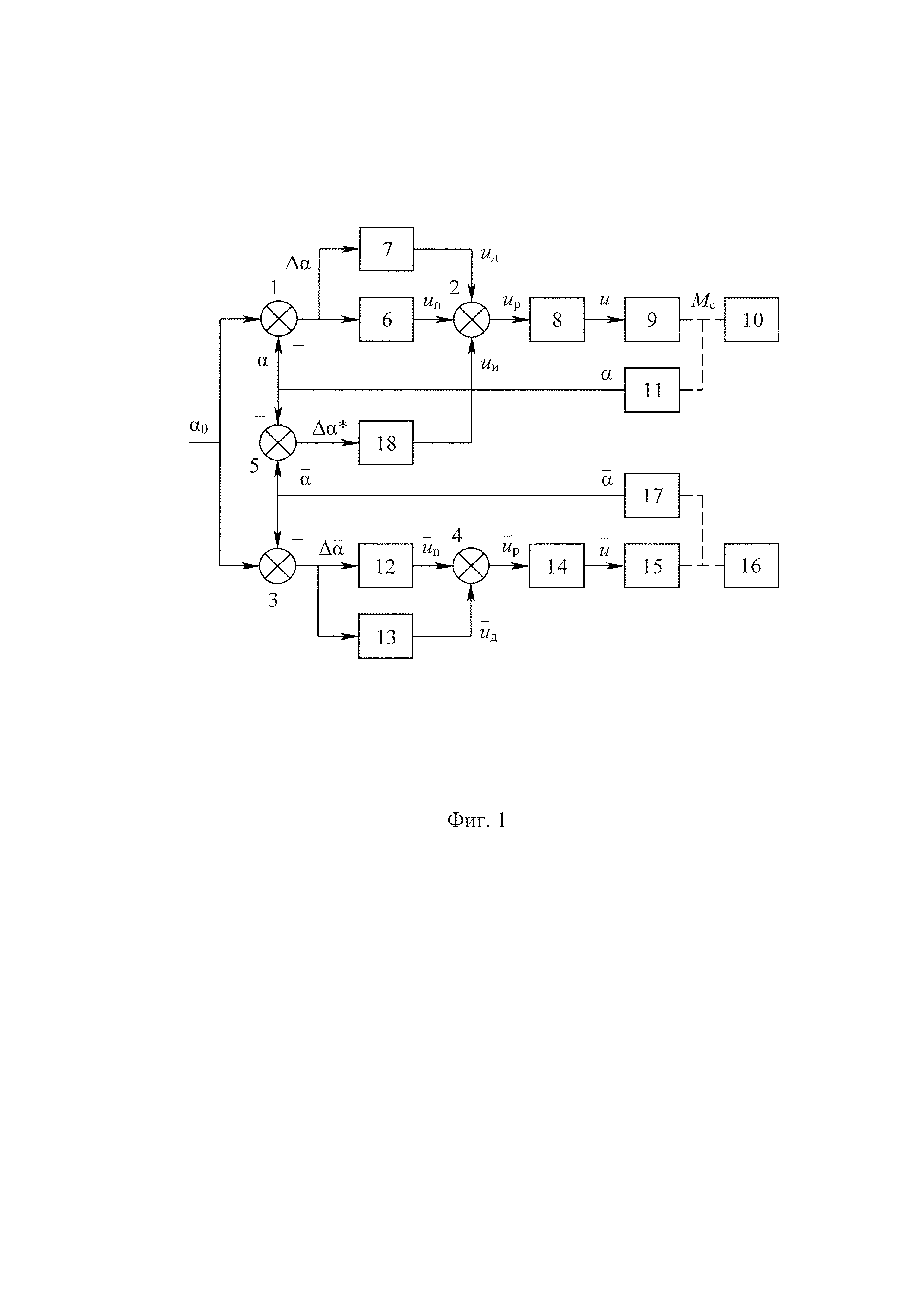
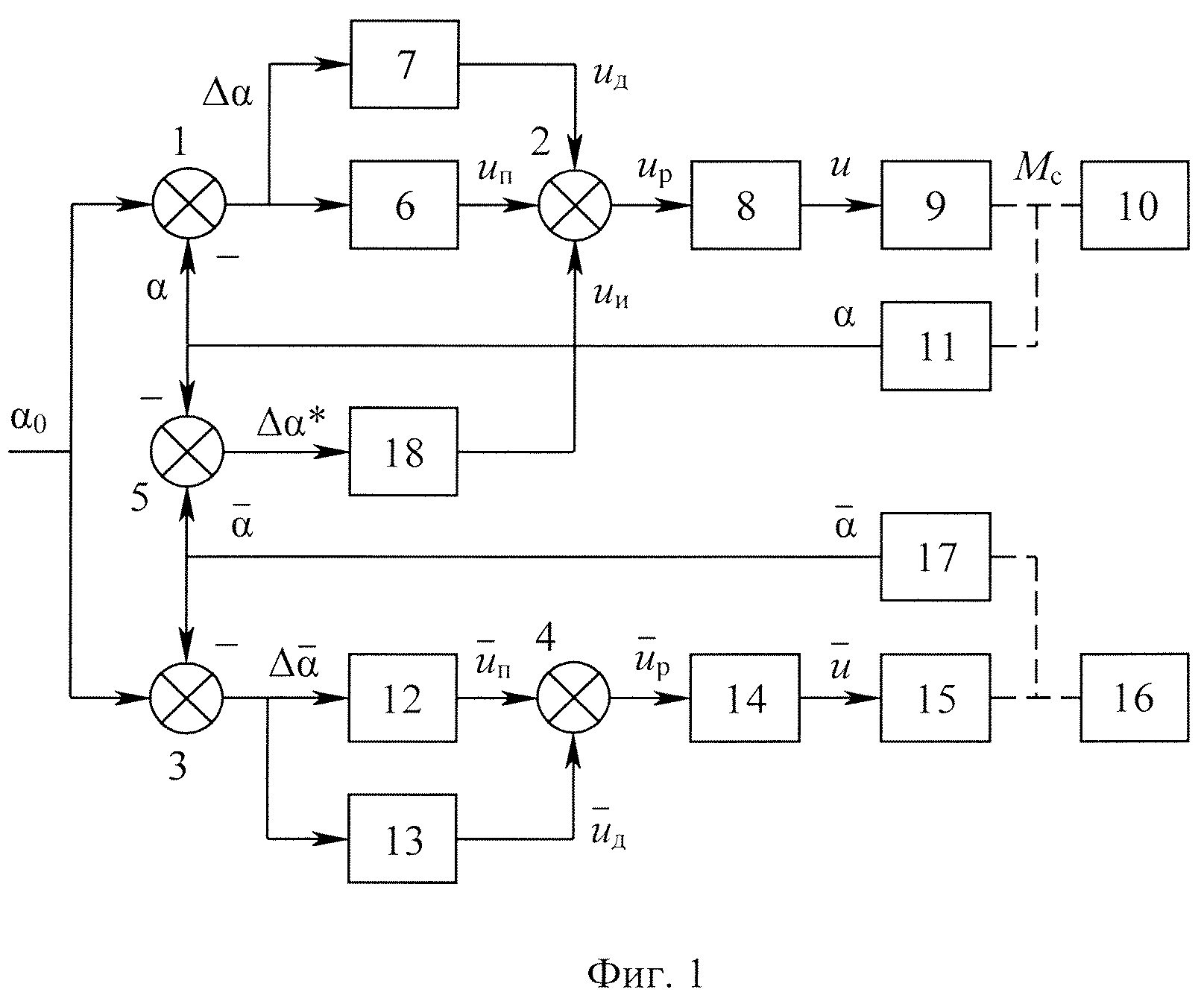
фиг. 1 - функциональная схема электропривода;
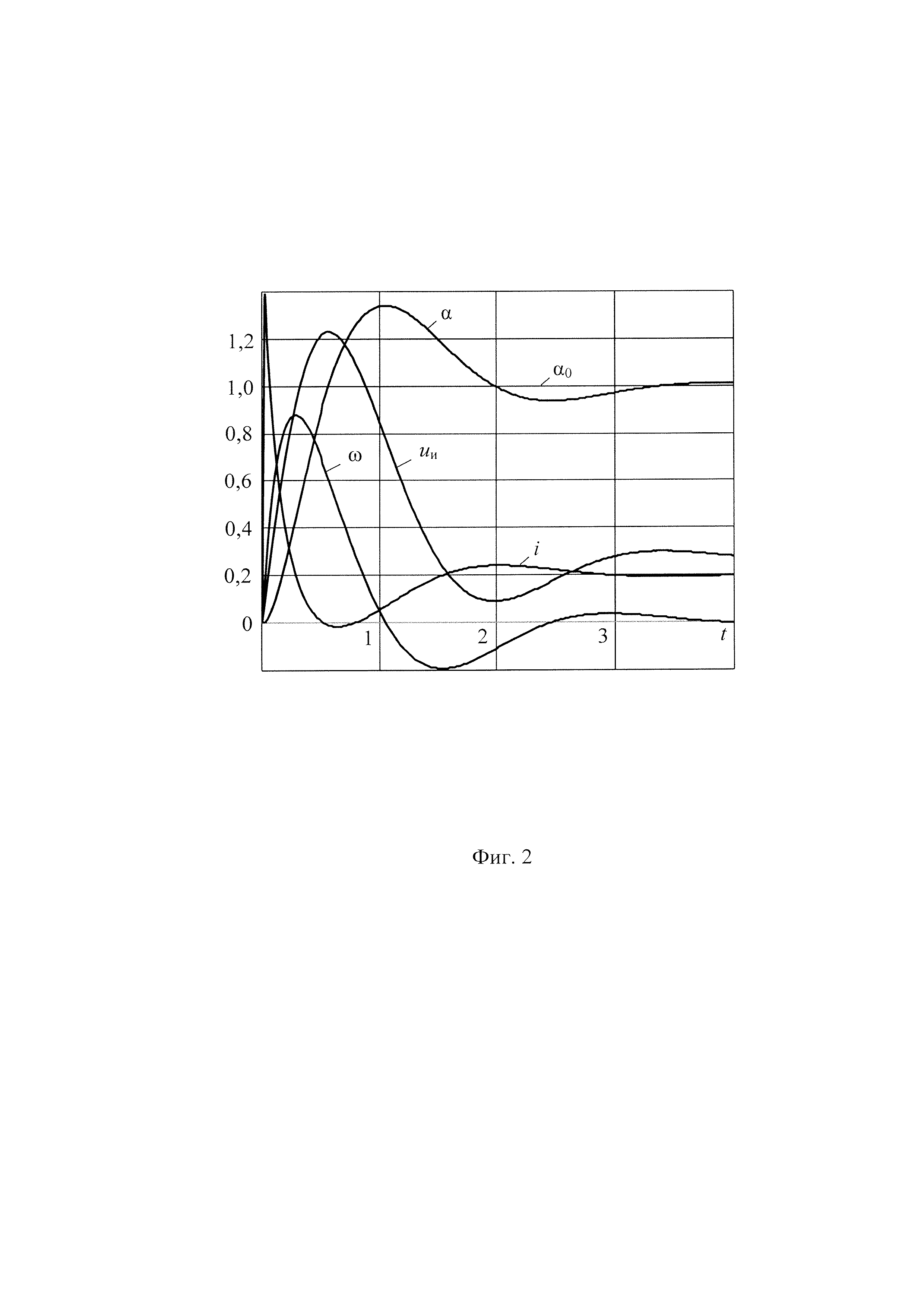
фиг. 2 - графики сигналов при классическом ПИД-регуляторе и скачкообразном входном сигнале;
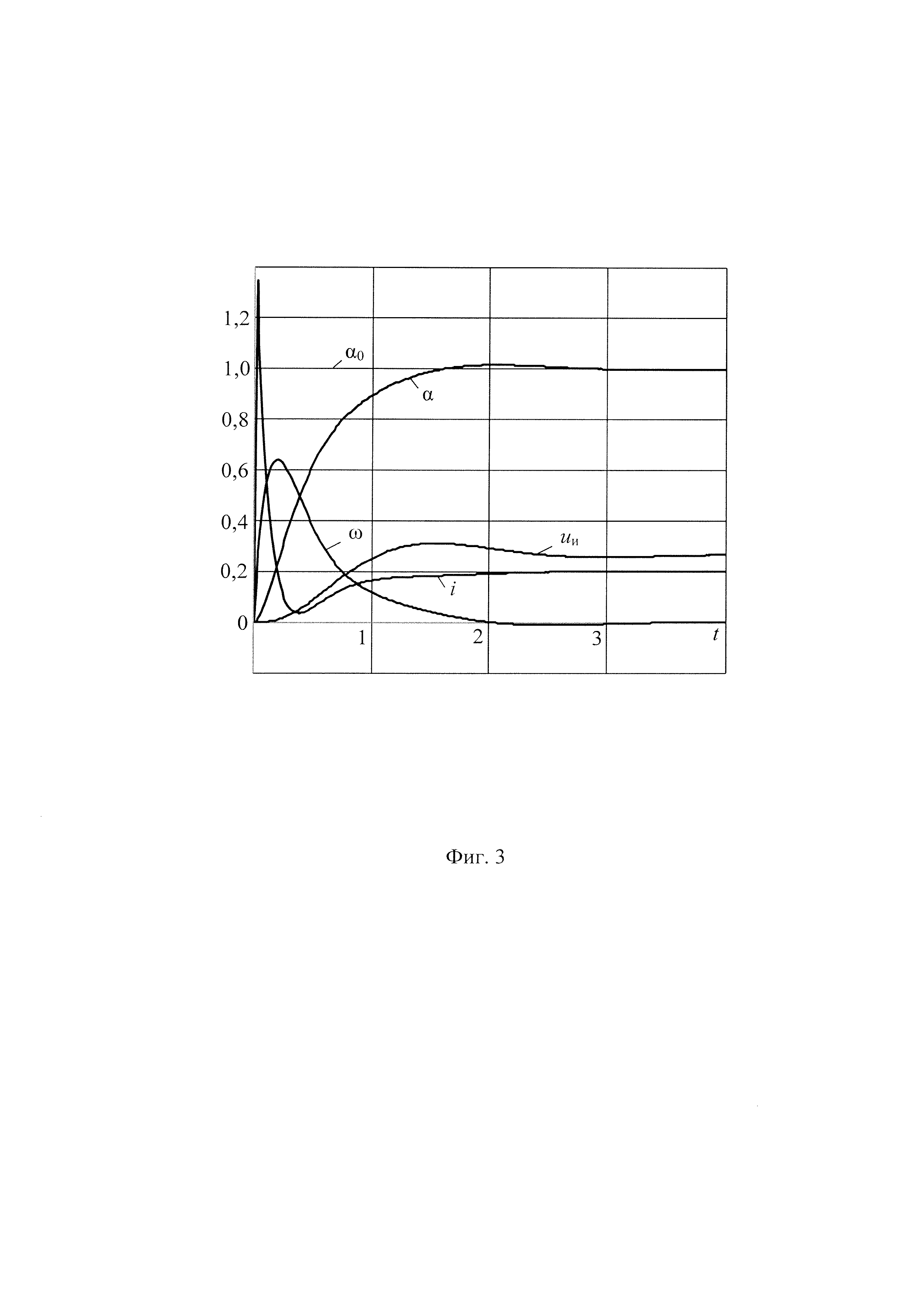
фиг. 3 - графики сигналов в предлагаемом электроприводе при скачкообразном входном сигнале;
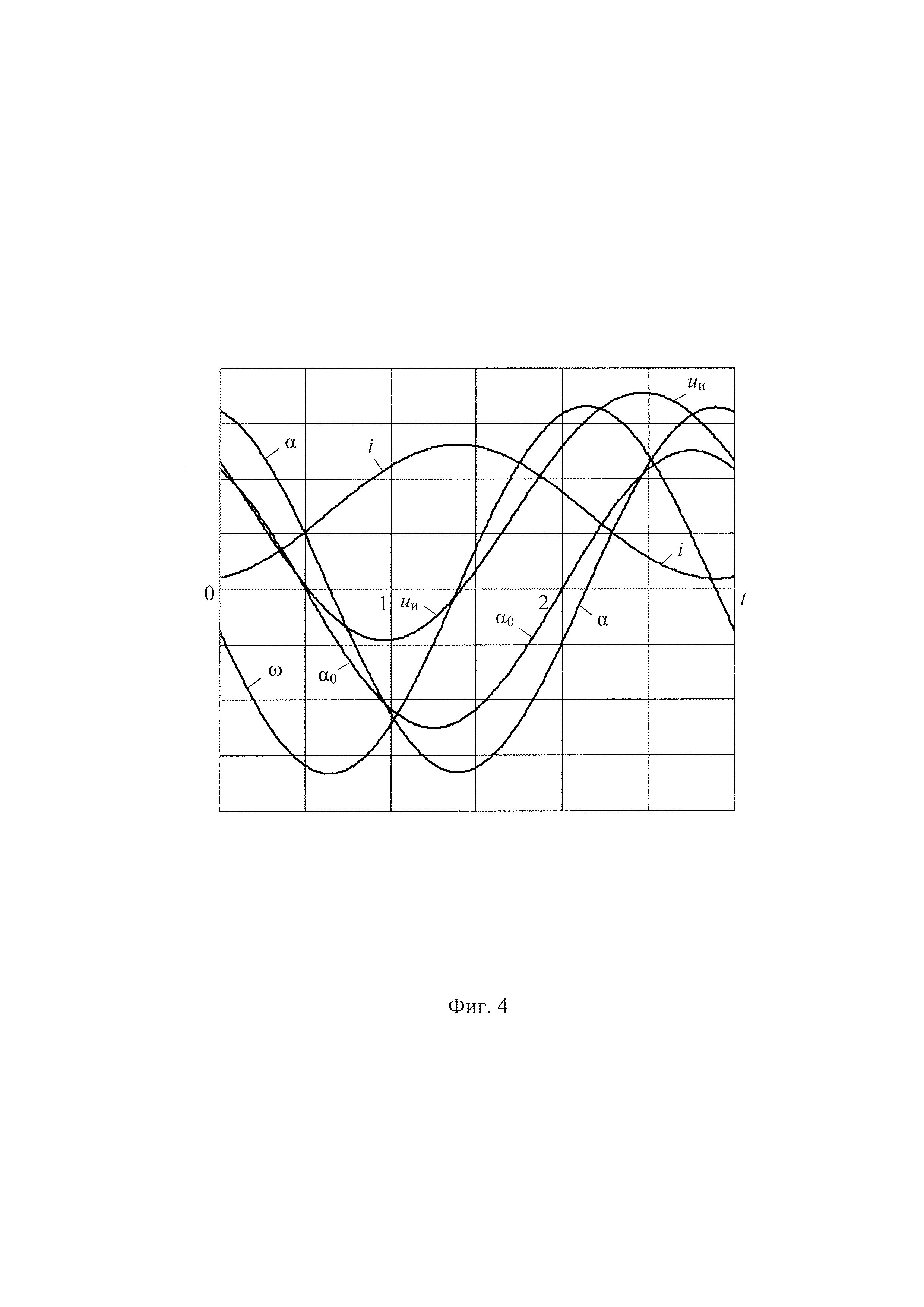
фиг. 4 - графики сигналов при классическом ПИД-регуляторе в установившемся режиме при синусоидальном входном сигнале;
фиг. 5 - графики сигналов в предлагаемом электроприводе в установившемся режиме при синусоидальном входном сигнале.
Функциональная схема электропривода показана на фиг. 1. Здесь 1-5 - сумматоры; 6 - пропорциональное звено; 7 - дифференцирующее звено; 8 - усилитель мощности; 9 - электродвигатель; 10 - объект управления; 11 - датчик угла; 12 - модель пропорционального звена; 13 - модель дифференцирующего звена; 14 - модель усилителя мощности; 15 - модель электродвигателя; 16 - модель объекта управления; 17 - модель датчика угла; 18 - интегратор.
Входом электропривода являются первые входы входного сумматора 1 и сумматора 3. Второй инвертирующий вход сумматора 1 подключен к выходу датчика угла 11, а выход подключен к входам пропорционального 6 и дифференцирующего 7 звеньев, выходы которых подключены к первому, второму входам сумматора 2. Его третий вход подключен к выходу интегратора 18, а выход соединен со входом усилителя мощности 8. Его выход подключен к входу электродвигателя 9, вал которого связан с объектом управления 10 и датчиком угла 11.
Второй инвертирующий вход сумматора 3 подключен к выходу модели датчика угла 17, а выход подключен к входам пропорционального 12 и дифференцирующего 13 звеньев, выходы которых подключены к первому, второму входам сумматора 4. Его выход соединен со входом модели усилителя мощности 14. Его выход подключен ко входу модели электродвигателя 15, вал которого связан с моделью объекта управления 16 и моделью датчика угла 17. Его выход подключен к первому входу выходного сумматора 5, второй инвертирующий вход которого подключен к выходу датчика угла 11, а выход подключен ко входу интегратора 18.
Электропривод работает следующим образом. Задающее воздействие α0 поступает на первый вход сумматора 1. Датчик угла 11 вырабатывает сигнал, пропорциональный углу поворота α объекта управления 10. Этот сигнал поступает на второй инвертирующий вход сумматора 1, который формирует сигнал погрешности
Δα=α0-α.
Этот сигнал поступает на входы пропорционального 6 и дифференцирующего 7 звеньев, которые вырабатывают сигналы  ,
,  согласно уравнениям
согласно уравнениям
Эти сигналы приходят на первый и второй входы сумматора 2.
Задающее воздействие α0 поступает на первый вход сумматора 3. Модель датчика угла 17 вырабатывает сигнал, пропорциональный углу поворота  модели объекта управления 16. Этот сигнал поступает на второй инвертирующий вход сумматора 3, который формирует сигнал погрешности
модели объекта управления 16. Этот сигнал поступает на второй инвертирующий вход сумматора 3, который формирует сигнал погрешности
Этот сигнал поступает на входы пропорционального 12 и дифференцирующего 13 звеньев, которые вырабатывают сигналы  ,
,  согласно уравнениям
согласно уравнениям
Эти сигналы приходят на входы сумматора 4, который вырабатывает сигнал модели регулятора
поступающий на вход модели усилителя мощности 14. Его выходной сигнал
приходит на вход модели 15 электродвигателя, связанного с моделью объекта управления 16 и с моделью датчика 17 угла. Движение модели объекта управления описывается уравнениями
где  - угловая скорость модели объекта управления 16; JΣ - его момент инерции;
- угловая скорость модели объекта управления 16; JΣ - его момент инерции; - электромагнитный момент модели электродвигателя 15.
- электромагнитный момент модели электродвигателя 15.
Выходной сигнал  модели датчика 17 угла поступает на первый вход сумматора 5, на второй инвертирующий вход которого приходит сигнал а с датчика угла 11, а на выходе формируется сигнал рассогласования
модели датчика 17 угла поступает на первый вход сумматора 5, на второй инвертирующий вход которого приходит сигнал а с датчика угла 11, а на выходе формируется сигнал рассогласования
Этот сигнал поступает на вход интегратора 18, формирующего сигнал
приходящий на третий вход сумматора 2. Он вырабатывает сигнал регулятора
поступающий на вход усилителя мощности 8. Он питает электродвигатель 9 напряжением
Электродвигатель 9 вращает объект управления 10 согласно уравнениям
Здесь М - электромагнитный момент; М=ci; с - постоянный коэффициент; i - ток электродвигателя.
Отметим, что электропривод имеет статический момент Мс, медленно изменяющийся во времени, а регулятор является пропорционально-интегрально-дифференциальным (ПИД-регулятор). Модель электропривода не учитывает статический момент, а регулятор модели является пропорционально-дифференциальным. Интегратор в качестве входного сигнала использует угол рассогласования между объектом управления 10 и его моделью 16.
На фиг. 2 представлены графики угла, скорости вращения, тока электродвигателя и сигнала интегратора при классическом ПИД-регуляторе и скачкообразном входном сигнале. Видно, что интегрирующее звено реагирует на полную погрешность, не разделяя ее на динамическую и статическую составляющие. После первого достижения требуемого значения угла ао наблюдается значительный динамический выброс, связанный со сбросом интегратором лишнего сигнала.
На фиг. 3 даны графики угла, скорости вращения, тока электродвигателя и сигнала интегратора в предлагаемом электроприводе при скачкообразном входном сигнале. Видно, что сигнал интегратора связан со статической погрешностью, а динамический выброс значительно ослаблен.
Параметры электропривода имеют следующие значения:


Время моделирования электропривода - 4 с, шаг интегрирования - 0,2 мс.
На фиг. 4 представлены графики входного угла α0, угла α, скорости вращения со, тока электродвигателя i и сигнала интегратора uи в электроприводе при классическом ПИД-регуляторе в установившемся режиме при синусоидальном входном сигнале. Видно, что сигнал интегрирующего звена uи содержит полезную постоянную составляющую, а также большую переменную составляющую. Угол α значительно отличается от входного сигнала α0.
На фиг. 5 даны графики входного угла α0, угла α, скорости вращения со, тока электродвигателя i и сигнала интегратора uи в предлагаемом электроприводе в установившемся режиме при синусоидальном входном сигнале. Видно, что сигнал интегратора uи постоянен, а угол а близок к входному углу α0.
Таким образом, благодаря выполнению регуляторов основного электропривода и его эталонной модели пропорционально-дифференциальными и добавления в закон управления электропривода интегрального сигнала, формируемого по разности выходных сигналов электропривода и его модели получен электропривод с компенсацией действия статического момента и высокими динамическими характеристиками.
Электропривод, содержащий основной электропривод с входным сумматором, эталонную модель и выходной сумматор, инвертирующий вход которого соединен с выходом основного электропривода, а неинвертирующий вход - с выходом эталонной модели, неинвертирующий вход входного сумматора соединен с входом электропривода, отличающийся тем, что основной электропривод содержит пропорциональное и дифференцирующее звенья, подключенные к выходу входного сумматора, выходы которых подключены к первому, второму входам второго сумматора, соединенного последовательно с усилителем мощности и электродвигателем, механически связанным с объектом управления и датчиком угла, выход которого подключен ко второму инвертирующему входу входного сумматора, эталонная модель содержит третий сумматор, первый вход которого соединен с входом электропривода, а выход подключен к входам моделей пропорционального и дифференцирующего звеньев, выходы которых подключены к первому, второму входам четвертого сумматора, соединенного последовательно с моделями усилителя мощности и электродвигателя, связанных с моделями объекта управления и датчика угла, выход которого подключен ко второму инвертирующему входу третьего сумматора, введен интегратор, вход которого подключен к выходу выходного сумматора, а выход подключен к третьему входу второго сумматора.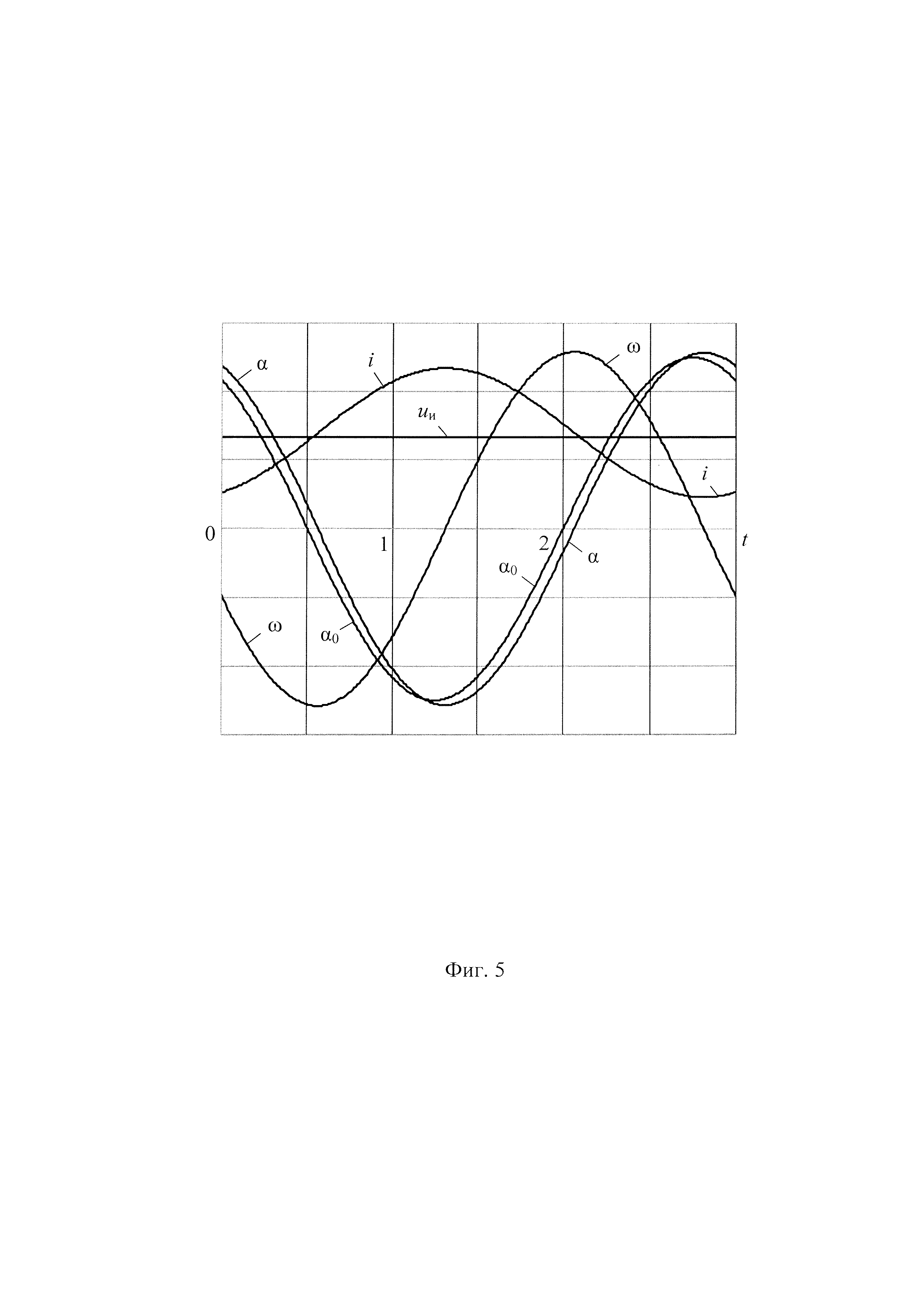
Мотор-колесо для самолета
Синхронный электродвигатель с магнитной редукцией
Устройство для увлажнения воздуха
Поворотный электромагнит
Магнитный редуктор
Злаковый батончик для питания работающих с соединениями свинца
Злаковый батончик для питания работающих с вредными соединениями мышьяка и фосфора
Гаситель крутильных колебаний
Вентильный электропривод
Турбореактивный двухконтурный двигатель
Синхронный электродвигатель
Синхронный электродвигатель
Синхронный электродвигатель

