Результат интеллектуальной деятельности: Способ контроля маршрута движения автономного необитаемого подводного аппарата с возможностью съёма технической информации и устройство для его реализации
Вид РИД
Изобретение
Предлагаемое изобретение относится к области специальной радиотехники и может быть использовано в системе управления и контроля автономного необитаемого подводного аппарата.
К автономным необитаемым подводным аппаратам (АНПА) относятся самоходные НПА с автономной системой энергообеспечения и, как правило, беспроводным каналом телеуправления и связи [Необитаемые подводные аппараты: состояние и общие тенденции развития. Электроника: наука, технология, бизнес 7/2009, с. 62].
Известно [Е.С. Лазарев. Пути совершенствования океанографических необитаемых подводных аппаратов. // Журнал Известия Южного федерального университета. Технические науки. 2010. с. 179], что основными направлениями совершенствования и развития АНПА являются: повышение их автономности за счет новейших источников энергии; совершенствование систем автономной навигации и каналов связи с целью получения информации в реальном времени и повышения степени управляемости аппарата.
С возрастанием степени автономности НПА и продолжительности рабочего цикла возникает необходимость контроля заданного алгоритма его функционирования для проверки правильности следования внесенного в память маршрута движения, оперативного получения информации о состоянии работы его систем, а в случае сбоя или отказа аппаратуры - для его поиска.
В качестве прототипов АНПА для предлагаемого изобретения рассмотрены аппараты повышенной автономности существующих робототехнических средств ЗАО «НПППТ «Океанос» - глайдеры типа IVER2, ТПА типа Н300Мк2. Эти средства наиболее близко отвечают требованиям самостоятельного, долговременного и скрытого мониторинга [Б.А. Гайкович, В.Ю. Занин, И.В. Кожемякин. Вопросы разработки морских робототехнических платформ на примере создания подводного аппарата типа «Глайдер». Конференция «перспективные системы и задачи управления». Морская робототехника. С. 153]. На этих аппаратах уже имеются станции цифровой радиосвязи, узел WiFi ближнего радиуса действия, 3G станции связи (используемой в отладочном режиме), модули гидроакустической связи (гидроакустический модем, с возможностью подводной навигации) и спутниковой связи.
В качестве устройства контроля и определения местоположения объектов взят прототип, описанный в следующем патенте [Патент РФ на изобретение №2561012 от 23.04.2014], где система содержит группировку расположенных на водной поверхности радиогидроакустических буев, связанных радиоканалами со станцией контроля и гидроакустическими каналами - с подводным объектом.
Каждый из буев группировки содержит приемник сигналов внешней навигационной системы, гидроакустическую аппаратуру, обеспечивающую возможность приема информационных гидроакустических сигналов, поступающих с подводного объекта, а также средства, обеспечивающие возможность определения задержек распространения принимаемых информационных гидроакустических сигналов, и средства радиосвязи со станцией контроля, обеспечивающие возможность передачи на нее данных об указанных задержках и данных о текущем местоположении буя.
Анализ использования двух прототипов [Б.А. Гайкович, В.Ю. Занин, И.В. Кожемякин. Вопросы разработки морских робототехнических платформ на примере создания подводного аппарата типа «Глайдер». Конференция «перспективные системы и задачи управления». Морская робототехника, с. 153; Патент РФ на изобретение №2561012 от 23.04.2014] в совокупности показал следующие недостатки:
1) построение такой системы для обеспечения контроля автономных аппаратов требует существенных материальных затрат и значительных временных ресурсов на оборудование района действия АНПА;
2) оборудование района такими средствами, как буи, снижает надежность и безопасность использования системы в целом, делая ее уязвимой перед внешними факторами;
3) значительное количество элементов системы увеличивает время, затраты и ресурсы на поддержание ее работоспособности или восстановление в случае повреждения;
4) использование различного излучающего радиопередающего оборудования вынуждает АНПА всплывать или держаться вблизи поверхности моря, увеличивая риск его повреждения проходящим надводным средством;
5) в случае выхода из строя балластного устройства, АНПА не сможет всплыть на поверхность или требуемую глубину, для вызова аварийной службы при использовании радиопередающего оборудование.
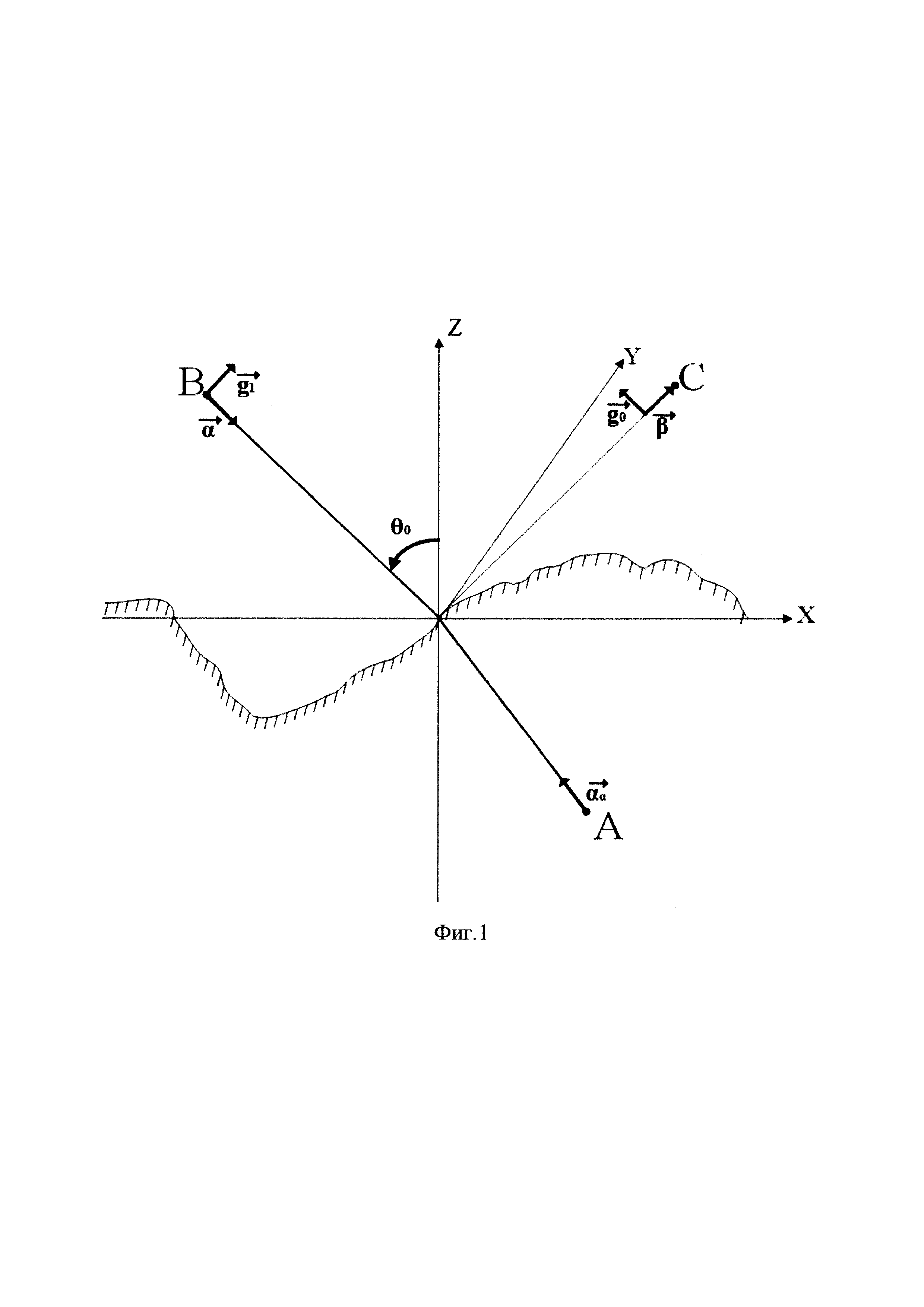
Указанные недостатки устраняются при построении такого устройства на основе известного [Ю.П. Дьяков, К.К. Ляпин, Н.И. Поздняков и др. Радиофизический метод зондирования гидроакустических полей. / Тезисы четырнадцатой Всесоюзной школы-семинара по статистической гидроакустике. - М: Акустический институт им. акад. Н.Н. Андреева АН СССР, 1986, с. 94-97; Патент РФ на изобретение №2257692 от 28.06.2005] способа радиолокационного считывания акустических вибраций водной поверхности, облучаемой гидроакустическими волнами. В этом способе (Фиг. 1) используется акустический излучатель, помещенный в точке А на подводном объекте, и облучаемый поверхность моря на частоте акустических волн Ωa. Приемоизлучатель электромагнитных волн (ЭМВ) на частоте ω, находится на мобильной или стационарной платформе (точка В). В общем виде, отраженный от поверхности моря, в области акустической вибрации, сигнал определяется в точке С, где он состоит из трех компонент: средней (СК) с частотой ω и двух комбинационных - верхней (ВКК) и нижней (НКК) с частотами соответственно ω+Ωa и ω-Ωa.
Полезная часть отраженного сигнала является ВКК, которая может быть записана в виде [Ю.П. Дьяков, К.К. Ляпин, Н.И. Поздняков и др. Радиофизический метод зондирования гидроакустических полей. / Тезисы четырнадцатой Всесоюзной школы-семинара по статистической гидроакустике. - М: Акустический институт им. акад. Н.Н. Андреева АН СССР, 1986]:
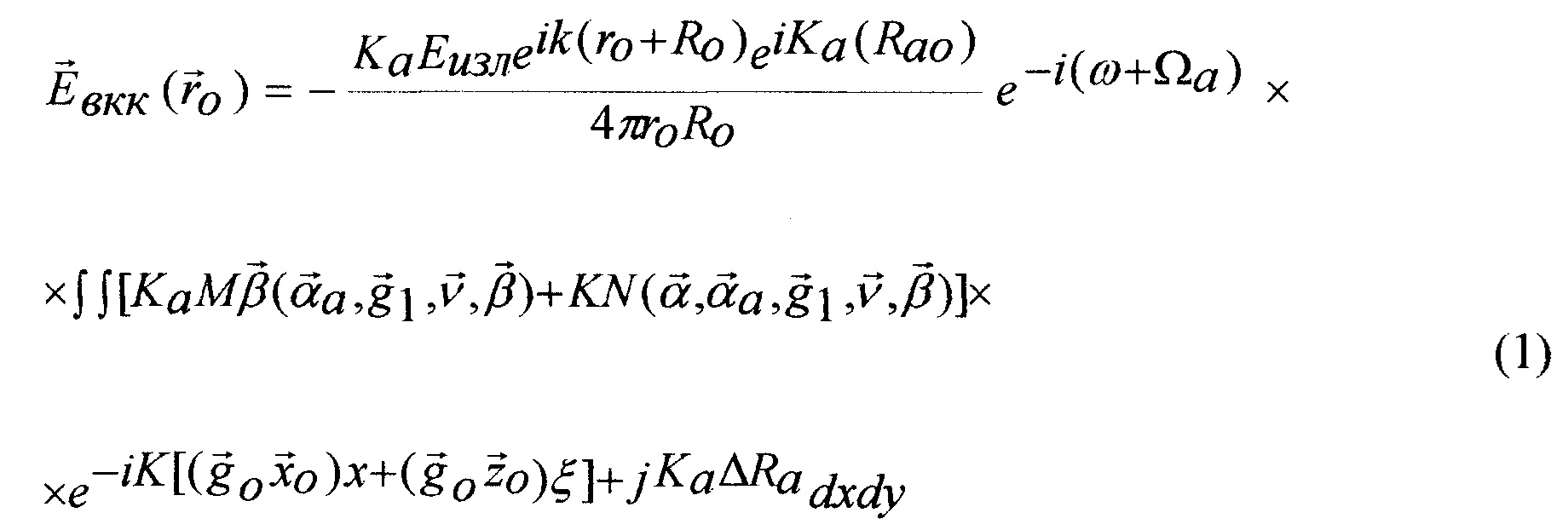
где:
К - волновое число ЭМВ;
Ка - волновое число акустических волн;
 - напряженность поля, излучаемого с ЛА;
- напряженность поля, излучаемого с ЛА;
ω - круговая частота ЭМВ;
R0 - расстояние от ЛА до центра облучаемого участка;
Ra0 - расстояние от ПО до центра облучаемого участка;
r0 - расстояние от точки наблюдения до центра облучаемого участка;
М, N - коэффициенты, учитывающие векторные соотношения падающей и отраженной волн;
 - орт направления падения акустической волны в текущую точку поверхности ξ(x,y,t),
- орт направления падения акустической волны в текущую точку поверхности ξ(x,y,t),
q0 - орт направления падения ЭМВ;
х, z - орты координат;
ν - орт нормали к поверхности ξ(x,y,t),
 - амплитуда вибрации поверхности воды,
- амплитуда вибрации поверхности воды,
ρca - акустический импеданс воды,
 - амплитуда акустического давления,
- амплитуда акустического давления,
Ωa - круговая частота акустических колебаний,
 - единичный вектор поляризации падающей и рассеянной волны соответственно;
- единичный вектор поляризации падающей и рассеянной волны соответственно;
 и
и  - орты волновых векторов падающего и рассеянного электромагнитного поля;
- орты волновых векторов падающего и рассеянного электромагнитного поля;
 - приращение расстояния до текущей точки на поверхности моря по сравнению с расстоянием до начала координат, которое помещено в середину освещаемой площадки;
- приращение расстояния до текущей точки на поверхности моря по сравнению с расстоянием до начала координат, которое помещено в середину освещаемой площадки;
 - орт нормали к поверхности крупных волн;
- орт нормали к поверхности крупных волн;
 , где
, где  - орт нормали к поверхности Σ (х, y, t)
- орт нормали к поверхности Σ (х, y, t)
Максимум отраженного электромагнитного поля ВКК наблюдается в направлении, определяемом условием (точка С совмещается с точкой В, Фиг. 1).

где λ и  - длины волн ЭМ и акустической соответственно.
- длины волн ЭМ и акустической соответственно.
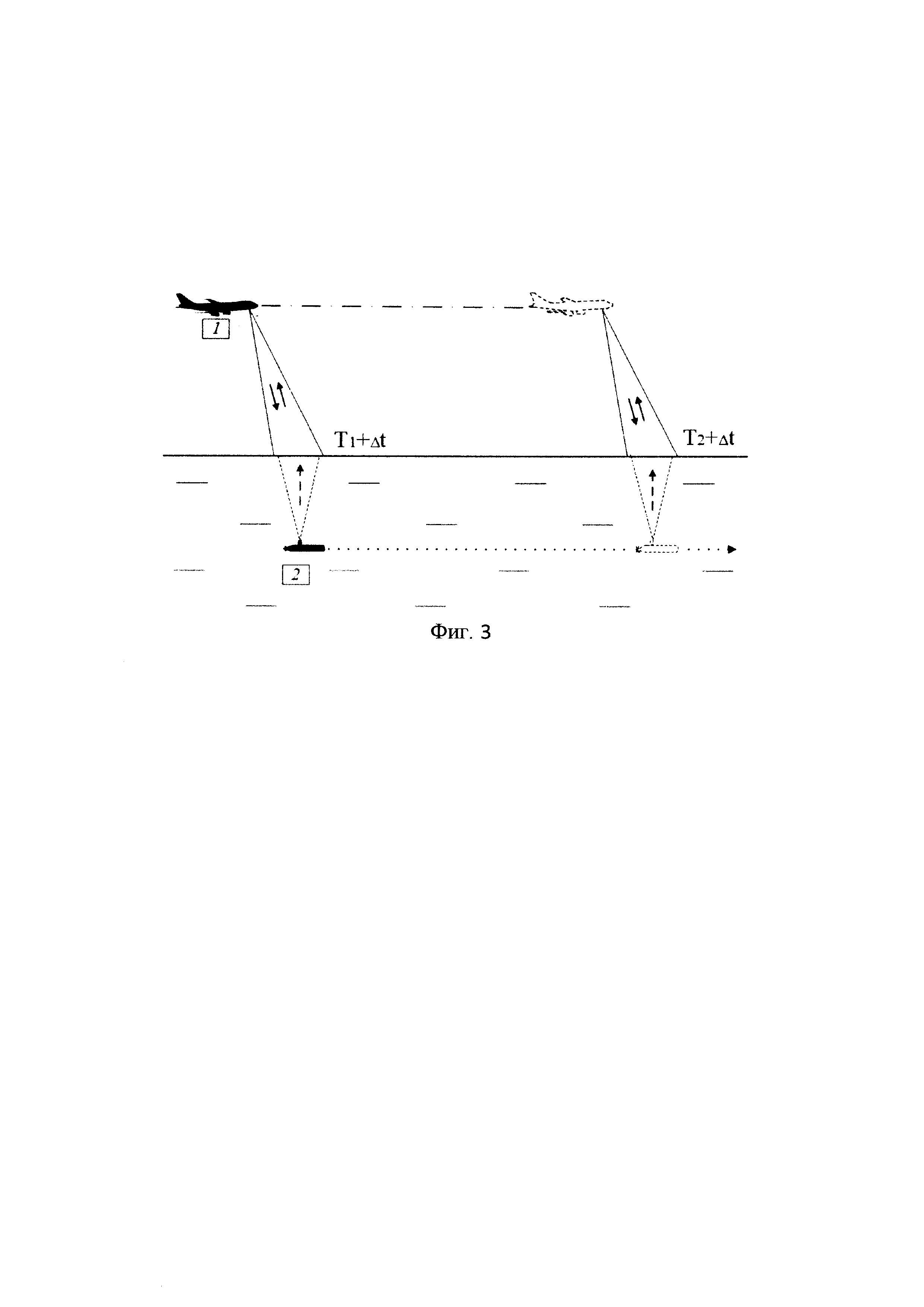
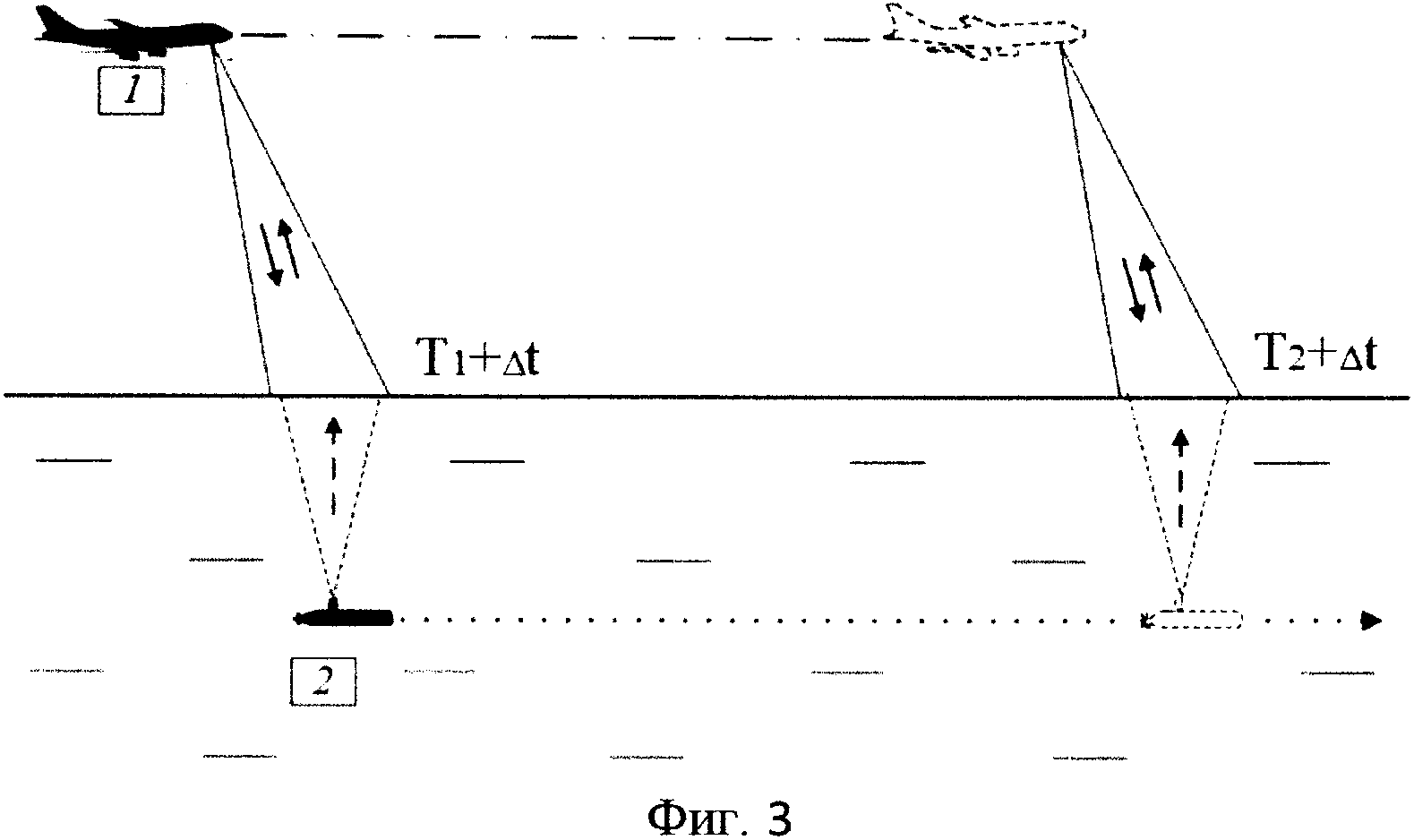
Целью предлагаемого изобретения, является реализация нового надежного и безопасного способа контроля маршрута движения АНПА с возможностью съема технической информации за счет взаимного и одновременного, по пространству и времени, облучения участка морской поверхности в месте нахождения АНПА, акустическими и электромагнитными волнами. За счет акустических волн в запрограммированные интервалы времени (T1+Δt, Т2+Δt и т.д.), относительно заданных контрольных точек маршрута движения, АНПА обозначает свое место на поверхности и, при их временном модулировании, в течение каждого периода акустического воздействия, передает техническую информацию через нее.
За счет облучения, приема и декодирования электромагнитных волн, отраженных от морской поверхности в месте (контрольной точке маршрута) движения АНПА, в этом же интервале времени (T1+Δt, Т2+Δt и т.д.), определяется наличие АНПА в соответствии с установленной программой движения, а за счет модуляции принимаемого радиосигнала в течение каждого периода акустического воздействия реализуется прием от него технической информации.
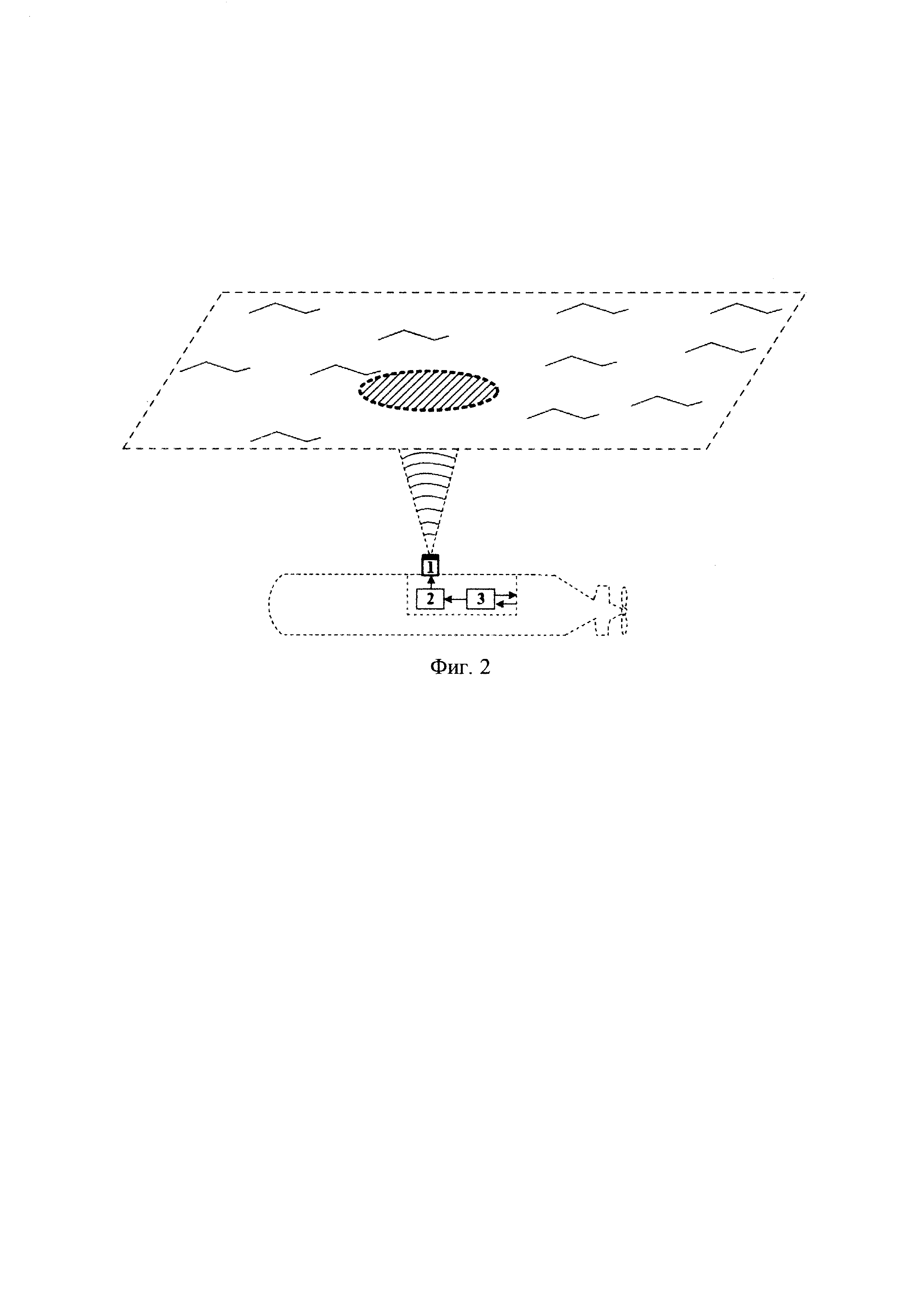
Для реализации предлагаемого способа контроля маршрута АНПА с возможностью съема технической информации предлагается устройство (Фиг. 2), состоящее из летательного или космического аппарата (1), оборудованного специальным радиолокационным устройством считывания акустических вибраций водной поверхности; АНПА (2), оборудованного акустической аппаратурой подсветки водной поверхности (Фиг. 3), в состав которой входит генераторный блок (2), блок управления (3) и акустический излучатель (1) с остронаправленной характеристикой излучения, ориентированной в направлении находящейся над ним поверхности воды.
Предложенный способ и устройство его реализующее, соответствует критерию существенные отличия, так как использование вышеописанного способа и технического решения в оборудовании АНПА вышеописанным комплектом аппаратуры, а также реализующего его устройства в известных существующих подводных аппаратах и устройствах их обеспечивающих или взаимодействующих с ними не обнаружено.
Прямотрубный парогенератор для модульной ядерной энергетической установки со свинцово-висмутовым теплоносителем
Система контроля работоспособности экипажа автомобиля для перевозки специальных грузов
Многорежимная парогазовая торпеда
Камера спасательная всплывающая подводного объекта
Устройство для укорачивания подъемных стропов судоподъёмного понтона
Устройство вентиляции отсеков аварийного подводного технического средства
Транспортное судно для проведения грузовых операций на необорудованный берег с усиленным авиационным вооружением
Подледный корректируемый снаряд
Устройство для разделения всплывающей камеры с подводным техническим средством
Способ дистанционного минирования
Способ определения аномалий на морской поверхности неконтактным радиолокационным методом
Способ мониторинга электропроводимости морской среды в удаленном районе
Способ передачи информации от подводного объекта на летательный аппарат

