Результат интеллектуальной деятельности: КРАН И СПОСОБ УПРАВЛЕНИЯ ИМ
Вид РИД
Изобретение
Изобретение относится к крану, в частности, в виде контейнерного или портального крана, содержащему электрические сервоприводы для подъема и/или перемещения грузов и/или элементов крана, генератор для электропитания сервоприводов, двигатель внутреннего сгорания для привода генератора, средства ввода управляющих команд для сервоприводов и устройство управления сервоприводами в зависимости от введенных управляющих команд. Изобретение относится также к способу управления таким краном.
При этом термин «кран» в контексте данной заявки следует понимать широко, и он может включать в себя в самом широком смысле также напольные транспортеры, такие как стеллажные транспортеры, вилочные погрузчики или другие подъемные механизмы, такие как портальные автомобили с подъемным устройством, причем могут подразумеваться, в частности, контейнерные краны, портовые портальные краны, так называемые краны RTG (Rubber Tyred Gantry), т.е. портальные краны на пневмоходу для контейнеров, а также строительные краны в виде, например, башенно-поворотных кранов, телескопических кранов или мачтовых кранов.
У таких электрических кранов, т.е. кранов с электроприводами, питаемых от генератора, эксплуатируемого с ДВС, на холостом ходу или в режиме частичной нагрузки обычно возникает расход топлива выше среднего, поскольку генераторный блок эксплуатируется обычно с постоянной частотой, например, 50/60 Гц.
Для уменьшения расхода, в частности, на холостом ходу, уже имеются концепции, в которых частота вращения ДВС понижается, когда все электроприводы выключены, в частности, при применении частотного преобразователя для управления электроприводами больше нет необходимости в обеспечении электропитания с постоянной частотой, например, с упомянутой выше частотой 50/60 Гц. Поскольку за счет частотного преобразователя прикладываемую к сервоприводам частоту сети можно варьировать по сравнению с частотой вращения генератора, то возможна эксплуатация ДВС, приводящего генератор, с произвольно выбираемой частотой. В частности, за счет этого можно выбрать такую частоту вращения ДВС, чтобы эксплуатировать его с оптимальным расходом, т.е. в эксплуатационном диапазоне с минимальными потерями и/или минимальным расходом.
Однако в результате такого снижения частоты вращения ДВС и/или такой настройки оптимальной в отношении расхода рабочей точки ДВС может уменьшиться эффективность использования крана, когда реализуются, например, лишь малые скорости перемещения, или могут подниматься ограниченные грузы. В худшем случае это может также привести к тому, что ДВС заглохнет и кран придется заново запустить, прежде чем можно будет выполнить подъем или перемещение.
Поэтому уже предлагалось больше не питать электрические сервоприводы электроэнергией непосредственно за счет генератора, а промежуточно включить батарею или аккумулятор, в которой/котором будет накапливаться выработанная генератором электроэнергия, и которая/который сможет затем питать электрические сервоприводы (US 2012/0089287 А1). За счет буферного действия аккумулятора можно осуществлять равномерную нагрузку ДВС и улавливать пики мощности электрических сервоприводов. Однако промежуточное включение такого аккумулятора и его регулирование в отношении ввода и вывода электрической мощности требует дополнительных электрических компонентов регулятора. К тому же сами батареи не только тяжелы и дороги, но и имеют ограниченный срок службы.
В основе изобретения лежит задача создания усовершенствованного крана и усовершенствованного способа управления таким краном, которые позволили бы избежать недостатков уровня техники и предпочтительным образом повысить его. В частности, должна быть максимально уменьшена потребность в топливе снабженным электрическими сервоприводами краном без ощутимого уменьшения эффективности использования крана.
Согласно изобретению поставленная задача решается посредством крана по пункту 1 и способа по пункту 13 формулы изобретения. Предпочтительные варианты осуществления изобретения являются объектом зависимых пунктов формулы изобретения.
Следовательно, предусмотрено, что на холостом ходу или в режиме частичной нагрузки электрических сервоприводов частота вращения и/или крутящий момент ДВС снижается, однако частота вращения и/или крутящий момент ДВС своевременно снова повышается, прежде чем сервоприводы снова потребуют более высокой или даже полной мощности. Чтобы не вызвать никаких ограничений при эксплуатации крана или даже не дать ДВС заглохнуть, эксплуатация ДВС не следует за фактической потребностью электрических сервоприводов в мощности, а регулируется заранее, чтобы отвечать будущей потребности электрических сервоприводов в мощности. Согласно изобретению, устройство управления содержит устройство для определения и/или оценки будущей потребности электрических сервоприводов в мощности с помощью приведения в действие средств ввода, с помощью которых вводятся управляющие команды для сервоприводов, и текущего эксплуатационного состояния сервоприводов, а также блок управления ДВС в зависимости от оцененной/выявленной будущей потребности в мощности. За счет того, что устройство управления предугадывает потребность сервоприводов в мощности, прежде чем они действительно достигнут рабочей точки, в которой возникает эта потребность в мощности, ДВС может быть своевременно доведен до рабочей точки, оптимальной или, по меньшей мере, подходящей для этой потребности в мощности. В частности, частоту вращения и/или крутящий момент ДВС можно повысить, чтобы удовлетворить возрастающей затем потребности электрических сервоприводов в мощности.
Предпочтительным образом при таком опережающем управлении ДВС сервоприводы могут питаться током или электроэнергией непосредственно и полностью от генератора, так что никакого промежуточного накопления выработанной электроэнергии не требуется. От соответствующих электрических накопителей энергии, таких как батареи, аккумуляторы и т.п., а также от соответствующих регулирующих модулей для ввода энергии в также промежуточные накопители и ее вывода можно отказаться. Электрические сервоприводы требуется лишь присоединить их электропитающими выводами непосредственно к генератору, и они могут питаться исключительно и полностью энергией, вырабатываемой в данный момент генератором. Сервоприводы питаются непосредственно от генератора, так сказать, онлайн. За счет отказа от батарей, аккумуляторов и соответствующих регулирующих компонентов для ввода и вывода энергии система может быть построена просто и недорого.
В одном варианте устройство управления может осуществлять при этом регулирование ДВС быстрее или медленнее и/или, при необходимости, задержать подачу управляющих команд на сервоприводы или довести сервоприводы с задержкой до нужной рабочей точки, чтобы за счет ДВС или приводимого им генератора всегда своевременно обеспечивать необходимую для сервоприводов потребность в мощности. При этом при возрастании потребности сервоприводов в мощности отдачу мощности от ДВС и/или сопутствующее этому вырабатывание мощности генератором можно повысить быстрее, чем возрастает потребность сервоприводов в мощности. В качестве альтернативы или дополнительно при снижении потребности сервоприводов в мощности выработанную ДВС мощность можно снизить медленнее, чем действительно падает мощность сервоприводов. Другими словами, при возрастании потребности в мощности частоту вращения и/или крутящий момент ДВС можно повысить, а при падении потребности в мощности – уменьшить.
Предпочтительным образом устройство управления может содержать модуль управления частотой вращения ДВС, причем названный модуль может быть выполнен таким образом, что ДВС регулируется с минимально возможным, однако максимально необходимым изменением частоты вращения, чтобы без больших излишков как раз достичь эксплуатационного состояния, необходимого или нужного для ожидаемой потребности электрических сервоприводов в мощности.
Предпочтительным образом устройство управления может содержать модуль управления частотой вращения ДВС, причем названный модуль может быть выполнен таким образом, что ДВС регулируется с минимально возможным, однако максимально необходимым изменением частоты вращения, чтобы без больших излишков как раз достичь эксплуатационного состояния, необходимого или нужного для ожидаемой потребности электрических сервоприводов в мощности.
В частности, устройство управления может содержать модуль управления ускорением ДВС, причем названный модуль может быть выполнен, в частности, таким образом, что ДВС регулируется с минимально возможным, однако максимально необходимым ускорением, чтобы именно своевременно достичь эксплуатационного состояния, необходимого или нужного для ожидаемой потребности в мощности. За счет того, что ДВС эксплуатируется предпочтительным образом всегда только с минимально необходимым ускорением, чтобы достичь новой рабочей точки, можно сберечь механику ДВС и избежать ненужного повышения расхода топлива в результате слишком быстрого ускорения.
Предпочтительным образом названный модуль управления ускорением может содержать средства определения, которые с помощью текущего эксплуатационного состояния электрических сервоприводов и приведения в действие средств ввода или введенных управляющих команд определяют момент, в который сервоприводы будут иметь или достигнут будущей потребности в мощности. На основе этого выявленного момента или выявленного соответствующим образом промежутка времени, который учитывается или требуется сервоприводам для достижения их рабочей точки, модуль управления ускорением может тогда определить необходимое ускорение ДВС, чтобы своевременно достичь эксплуатационного состояния, необходимого или нужного для возникающей тогда потребности сервоприводов в мощности.
В частности, устройство управления и блок управления двигателем могут быть выполнены таким образом, что будущая потребность в мощности рассчитывается настолько быстро, а ДВС регулируется настолько быстро, что он достигает рассчитанной для будущей потребности в мощности рабочей точки незадолго до того или самое позднее тогда, когда электрические сервоприводы достигают своей предугаданной, окончательной рабочей точки. Благодаря этому возможны эксплуатация крана без потери эффективности его использования и, тем не менее, экономия топлива.
В одном варианте названный блок управления двигателем может содержать устройство переменного управления частотой вращения ДВС в зависимости от будущей потребности в мощности и от текущего эксплуатационного состояния сервоприводов. В качестве альтернативы или дополнительно блок управления двигателем может содержать также устройство управления крутящим моментом, посредством которого в качестве альтернативы или дополнительно к регулированию частоты вращения можно управлять также крутящим моментом ДВС в зависимости от будущей потребности в мощности. Однако блок управления двигателем может также обойтись сам устройством управления частотой вращения и сам формировать сигнал управления частотой вращения, с помощью которого ДВС заранее регулируется до требуемой рабочей точки.
Определение будущей потребности в мощности, с помощью которой тогда происходит управление ДВС, может осуществляться, в принципе, различным образом или учитывать различные эксплуатационные параметры. В одном предпочтительном варианте можно учитывать при этом, в частности, силу и/или скорость и/или направление приведения в действие средств ввода и/или сопутствующую этому величину и/или скорость изменения вызванной средствами ввода управляющей команды. Например, ДВС может регулироваться быстрее, если средство ввода, например в виде джойстика, для управления серводвижениями крана приводится в действие быстрее, поскольку быстрое приведение в действие позволяет сделать вывод о более сильном отклонении и, тем самым, о пожелании высокой скорости перемещения. В качестве альтернативы или дополнительно можно учитывать также угол отклонения или путь перемещения джойстика или другого средства ввода, например, таким образом, что более сильное или дальнейшее отклонение преобразуется в относительно быстрое повышение частоты вращения и/или крутящего момента ДВС, поскольку резкое движение джойстика позволяет ожидать более резкого возрастания потребности в мощности.
В качестве альтернативы или дополнительно к такому учету скорости приведения в действие и/или ускорения приведения в действие и/или пути приведения в действие средств ввода можно для определения будущей потребности в мощности учитывать также число затронутых введенными управляющими командами сервоприводов. Если, например, одновременно или последовательно подаются управляющая команда на подъем подъемного механизма и управляющая команда на поворот стрелы или перемещение портала, то можно исходить из более сильного возрастания потребности в мощности, тогда как в случае управляющей команды только для одного сервопривода можно исходить из меньшей будущей потребности в мощности. В соответствии с этим блок управления двигателем при вводе управляющих команд, касающихся нескольких сервоприводов, может предусмотреть более сильное и/или более быстрое смещение рабочей точки ДВС и/или в случае лишь небольшого числа сервоприводов или только одного сервопривода – меньшее и/или более медленное смещение рабочей точки ДВС.
В качестве альтернативы или дополнительно можно для определения потребности в мощности также учитывать, какой сервопривод или какие из сервоприводов должен/должны затрагиваться введенной управляющей командой или желательным образом регулироваться. Например, при приведении в действие подъемного механизма можно исходить из более сильно возрастающей потребности в мощности, чем при приведении в действие поворотного механизма или мостового ходового привода. Следовательно, будущую потребность в мощности можно определить в зависимости от идентичности затронутого управляющими командами сервопривода.
В качестве альтернативы или дополнительно можно для определения будущей потребности в мощности также учитывать требуемую скорость и/или требуемое направление серводвижения. Если крановщик, например за счет соответствующего приведения в действие средств ввода, затребует быстрый ход, то будущую потребность в мощности можно оценить выше, чем в том случае, когда крановщик затребует лишь медленный ход.
В одном варианте устройство управления и/или блок управления двигателем учитывает для оптимального электропитания электрических сервоприводов также частоту вращения генератора. В частности, с помощью выявленной будущей потребности в мощности можно согласовать частоту вращения и/или крутящий момент ДВС с потребностью генератора. Например, блок управления двигателем может учитывать, что вырабатываемое генератором напряжение может зависеть от его частоты вращения. Поэтому для заданной потребности в мощности, сопутствующей выявленному уровню напряжения или потребности в напряжении, ДВС может быть ускорен до частоты вращения, которая, правда, не потребовалась бы с точки зрения мощности ДВС, однако учитывает данные генератора и принимает это в расчет. Например, ДВС может быть ускорен до повышенной частоты вращения, даже если он сам даже при более низкой частоте вращения смог бы выработать необходимую мощность, чтобы за счет названной повышенной частоты вращения учитывать данные генератора и эксплуатировать его в частотном диапазоне, в котором он может выработать необходимое напряжение.
Электрическими сервоприводами крана устройство управления может управлять предпочтительным образом посредством частотного преобразователя.
В одном варианте устройство управления может также учитывать уровень мощности ДВС при управлении электрическими сервоприводами, в частности таким образом, что движения крана ограничиваются в отношении скорости и/или ускорения и/или одновременного выполнения с целью ограничения необходимой для движений крана потребности в электрической мощности так, что эффективная мощность ДВС не достигается или не превышается. За счет этого можно предотвратить перегрузки ДВС и не дать ему в результате этого заглохнуть. Названная защита мощности ДВС за счет ограничения потребляемой электрическими сервоприводами мощности может быть целесообразной, в частности, тогда, когда, например, ДВС не может выработать свою номинальную мощность, например вследствие дефекта форсунки, засорения топливного фильтра и т.п.
Ограничение мощности для электрических сервоприводов может быть реализовано различным образом, например за счет ограничения максимальной скорости подъема или максимальной скорости перемещения соответствующего сервопривода. В качестве альтернативы или дополнительно можно сделать более плоской или ограничить рампу скорости и/или ускорения для регулирования соответствующего сервопривода. При необходимости, может быть также достаточным последовательное выполнение одновременно затребованных серводвижений двух или более сервоприводов, так что требования мощности сервоприводов не суммируются, а возникают последовательно. Возможны другие стратегии регулирования для соблюдения пределов мощности ДВС.
Изобретение более подробно поясняется ниже на предпочтительном примере его осуществления со ссылкой на прилагаемые чертежи, на которых изображают:
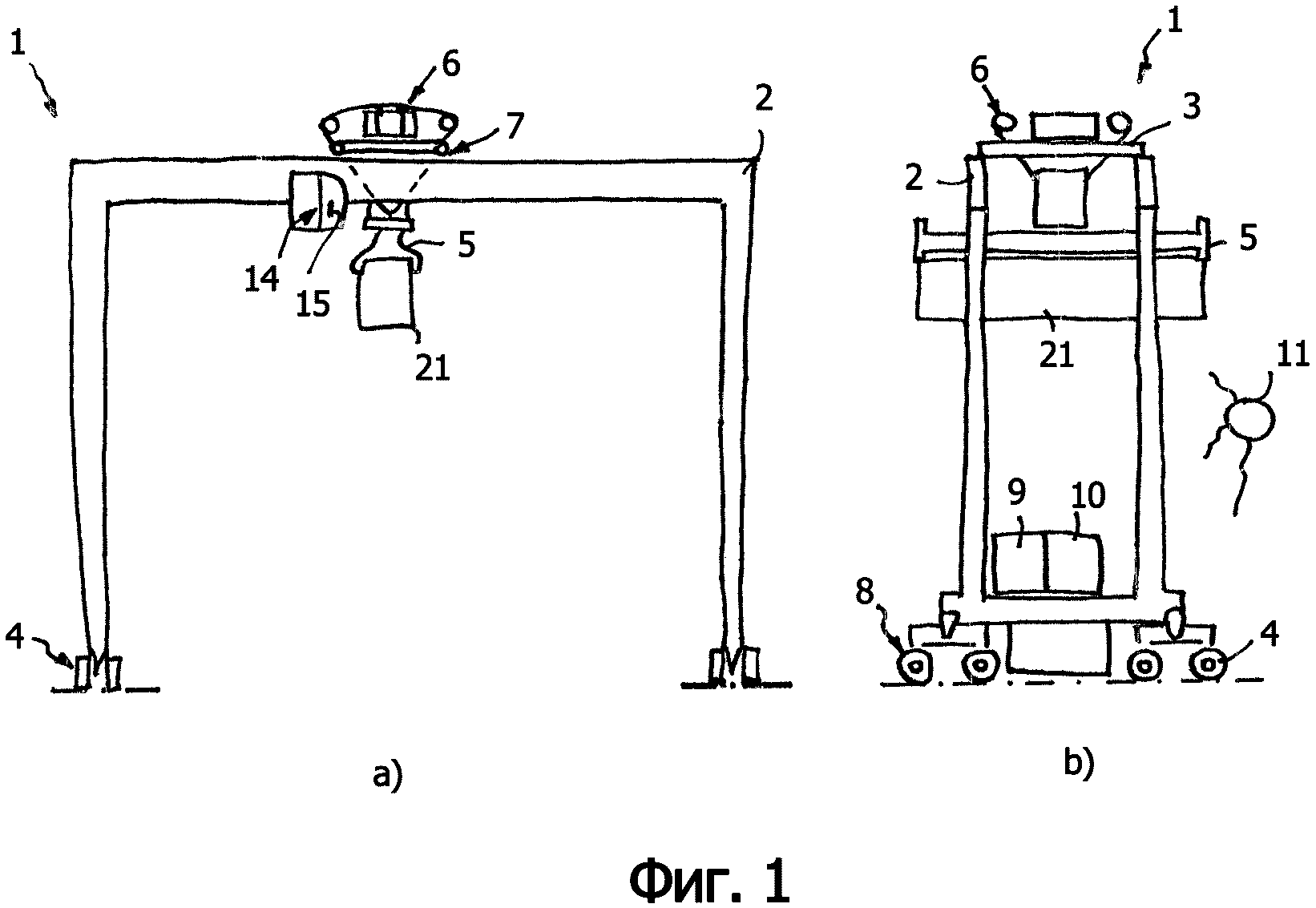
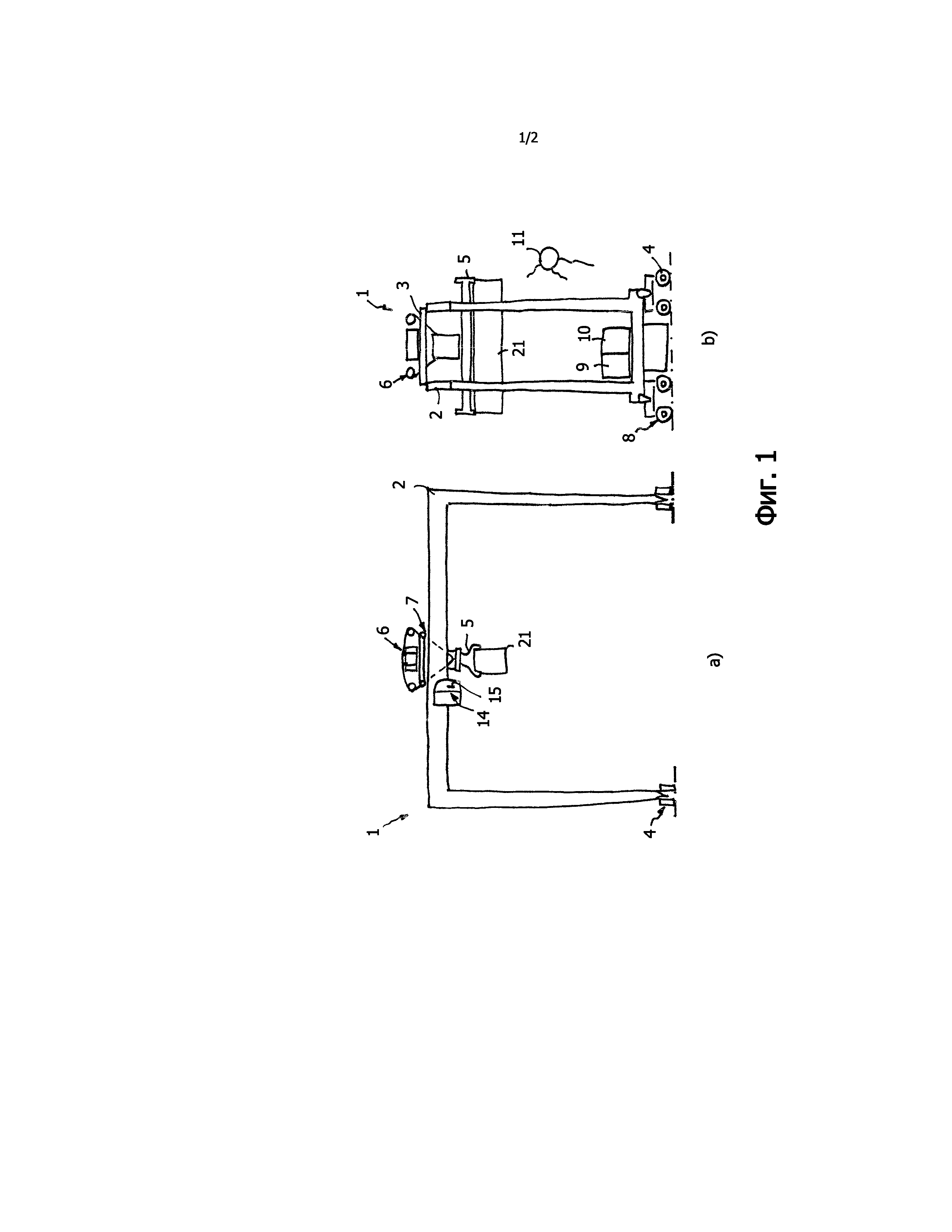
- фиг. 1: схематично кран в виде контейнерного крана на пневмоходу, причем на видах а и b показан кран соответственно спереди и сбоку;
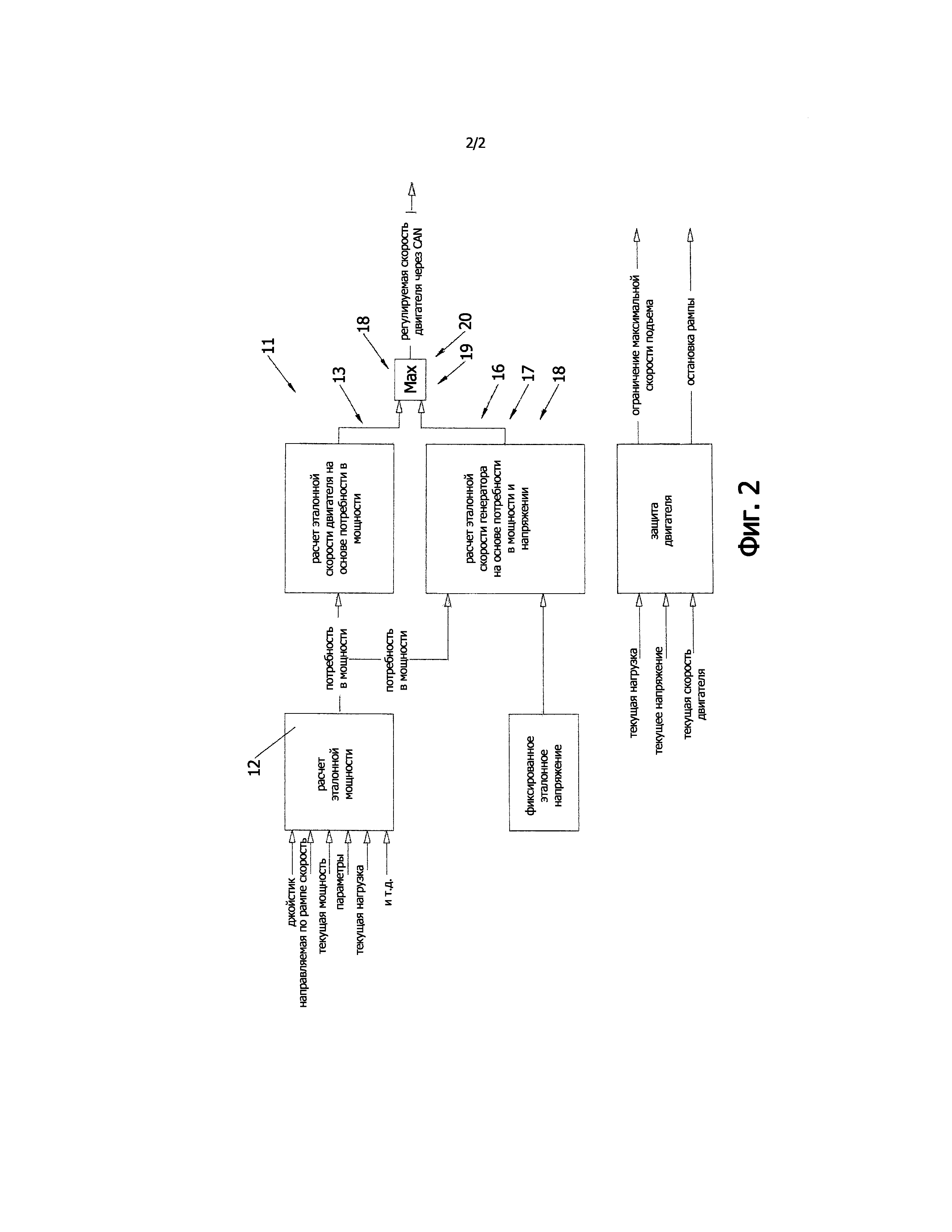
- фиг. 2: схематично устройство управления краном, посредством которого заранее оценивается или определяется будущая потребность электрических сервоприводов крана, представленного на фиг. 1, в мощности и в зависимости от будущей потребности в мощности, управляется ДВС крана из фиг. 1, посредством которого приводится генератор для электропитания электроприводов.
Как показано на фиг. 1, кран 1 может быть выполнен в виде контейнерного крана на пневмоходу, содержащего портал 2, который посредством, например, шасси 4 на пневмоходу может перемещаться на станции погрузки контейнеров. На портале 2 может быть расположен поперечно перемещаемый мост 3, на котором с возможностью подъема и опускания установлен подъемный механизм 5, посредством которого может захватываться контейнер 21.
Для перемещения названных компонентов крана предусмотрены электрические сервоприводы, в частности подъемный привод 6 для подъема и опускания названного подъемного механизма 5, что может осуществляться, например, посредством подъемного троса и соответствующих лебедок, мостовой привод 7, посредством которого мост 3 может перемещаться вдоль портала 2, и ходовой привод 8, посредством которого может приводиться шасси 4.
Названные электрические сервоприводы 6-8 могут питаться электроэнергией от генератора 9, который может приводиться ДВС 10, например в виде дизельного двигателя.
Для управления серводвижениями крана для крановщика предусмотрены средства 14 ввода, которые могут быть расположены в кабине 22 и содержать, например, джойстик 15, клавиши ввода, рычаги управления или ползунковые переключатели и т.п. С помощью названных средств 14 ввода могут формироваться или вводиться управляющие команды, которые служат для управления названными сервоприводами в виде подъемного 6, мостового 7 и ходового 8 приводов.
В зависимости от названных управляющих команд электрическое устройство 11 управления может управлять названными сервоприводами, что может осуществляться предпочтительно посредством частотного преобразователя, который известным образом может преобразовывать выработанную генератором 9 частоту.
Устройство 11 управления согласовывает далее частоту вращения и/или крутящий момент ДВС 10 с соответствующим эксплуатационным состоянием крана, чтобы, с одной стороны, обеспечить манипулирование краном без ущерба для эффективности его использования, а, с другой стороны, достичь как можно меньшего расхода топлива.
Как видно на фиг. 2, устройство 11 управления может содержать для этого устройство 12 определения, посредством которого с помощью текущего эксплуатационного состояния сервоприводов 6-8 и приведения в действие средств 14 ввода рассчитываются или определяются или оцениваются будущая потребность сервоприводов в мощности и, тем самым, необходимая ДВС 10 и генератору 9 мощность. Для этого на устройство 12 определения подаются различные сенсорные сигналы и/или информации, которые могут характеризовать приведение в действие средств ввода, эксплуатационное состояние крана и его структурные характеристики. В частности, на устройство 12 определения может подаваться, как показано на фиг. 2, информация о приведении в действие джойстика 15, о скорости приведения в действие, о фактической мощности сервоприводов и/или ДВС и/или генератора, о других эксплуатационных параметрах, например о частоте вращения ДВС, крутящем моменте ДВС, скорости перемещения сервоприводов или других элементов крана, и/или информация о фактической нагрузке на элементы крана и/или другая информация.
Устройство 12 определения в устройстве 11 управления рассчитывает по ней описанным выше образом будущую потребность в мощности, возникающую тогда, когда электрические сервоприводы 6-8 достигают затребованной введенными управляющими командами рабочей точки.
По выявленной будущей потребности в мощности блок 13 управления двигателем в устройстве 11 управления рассчитывает затем необходимую для этого рабочую точку или рабочий диапазон ДВС 10, в частности частоту вращения и/или крутящий момент.
При этом блок 13 управления двигателем, представленный на фиг. 2, учитывает также данные и потребности генератора 9, в частности какая частота вращения действительно требуется генератору, чтобы выработать необходимые для будущей потребности в мощности напряжение и количество тока. При этом могут найти применение характеристики генератора, например отдача напряжения в зависимости от частоты вращения, и т.п. Дополнительно могут учитываться рамочные условия, такие как требуемое постоянное эталонное напряжение.
Блок 13 управления двигателем в качестве результата этого процесса расчета устанавливает затем действительную рабочую точку для ДВС 10, причем блок 13 управления двигателем может рассчитывать также ускорение, с которым ДВС 10 достигает новой рабочей точки. Блок 13 управления двигателем и/или устройство 11 управления может содержать для этого блок 16 управления ускорением, который за счет средств 17 определения времени рассчитывает момент или промежуток времени, в который электрические сервоприводы 6-8 достигают предугаданной рабочей точки, в которой действительно возникает будущая потребность в мощности. Средства 18 определения ускорения рассчитывают затем необходимое ускорение для ДВС 10.
Как видно на фиг. 2, блок 13 управления двигателем и/или устройство 11 управления может обходиться только одной командой на быстродействие двигателя. Не требуется также дополнительно формировать сервосигнал для крутящего момента, даже если это, в принципе, было бы возможным.
Регулятор 19 частоты вращения и/или регулятор 20 крутящего момента в блоке 13 управления двигателем приводят затем ДВС 10 до нужной рабочей точки.
Электрический гусеничный ходовой механизм, а также его применение для самоходной рабочей машины
Самоходный наземный роторный экскаватор с электрическим приводом фрез-барабана
Самоходная рабочая машина с электрической системой привода, а также способ ее эксплуатации
Устройство для распознавания состояния непригодности каната из высокопрочных волокон, используемого в грузоподъемном механизме
Канатный барабан и канатный блок для канатного привода волоконного каната
Коробка передач с распределением мощности
Самоходная поверхностная фреза с жесткой опорой привода фрезерного барабана
Лебедка
Самоходная поверхностная фреза
Башенный поворотный кран
Кран

