Результат интеллектуальной деятельности: СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к космической технике и может быть использовано для привязки выполненных с космического аппарата (КА) снимков подстилающей поверхности.
Важную роль в процессе получения научной информации в космическом эксперименте играют радиотелеметрические системы. С их помощью на Землю передаются сведения об исследуемых процессах и явлениях, а также о работе научной аппаратуры и служебных системах. Используемая в космических экспериментах информационно-телеметрическая система состоит из бортовой части, устанавливаемой на КА, и наземной, связанной с ней радиолинией. Бортовая часть системы содержит устройства восприятия первичной информации, сбора, преобразования и последующей ее передачи в наземную часть системы, имеющую приемные, дешифрирующие (преобразующие), регистрирующие элементы, и средства визуального отображения принимаемой информации.
Для передачи большого объема информации, получаемой в космическом полете, применяются многоканальные радиотелеметрические системы (РТС) с различными методами разделения каналов.
Наибольшее распространение при обеспечении космических полетов получили системы с частотным и временным разделением каналов, что обусловлено рядом их технических и эксплуатационных преимуществ.
При частотном разделении каждому каналу отводится некоторая полоса частот, в пределах которой практически укладывается спектр той части сигнала, которая обеспечивает передачу информации этого канала. При временном разделении каждому каналу периодически предоставляется определенный интервал времени, в течение которого осуществляется передача сигнала данного канала.
Для передачи полученной на борту КА информации измерения от датчиков преобразуются в электрические величины. Электрические сигналы на борту КА поступают на суммирующие и кодирующие устройства, формирующие телеметрический кадр (групповой сигнал). Для разделения информации от каждого из используемых датчиков вводятся специальные адресные признаки. Сформированный таким образом групповой сигнал излучается в пространство и принимается наземными пунктами при пролете КА над ними.
Наиболее простой способ временной привязки телеметрических измерений реализуется в режиме непосредственной передачи (НП) данных на Землю [1] Мановцев А.П. Основы теории радиотелеметрии. М.: Энергия, 1973. В этом случае поступающая в режиме НП информация автоматически привязывается к используемому в пункте приема информации времени.
Однако данный способ реализуем только при нахождении КА в зоне наземного измерительного пункта.
В процессе полета по орбите космический аппарат периодически оказывается вне зоны видимости наземных измерительных пунктов (для низкоорбитальных аппаратов, в основном и реализуемых в нашей стране, большую часть полета КА не имеет прямой связи с наземными пунктами). Поэтому практически все научно-исследовательские КА имеют в своем составе запоминающие устройства (емкостью до 100 Гбит) для записи электрических сигналов, содержащих информацию об изучаемых явлениях.
Для обеспечения временной привязки информации в телеметрический кадр вводят специальные служебные сигналы, формируемые бортовым генератором эталонного времени. С помощью данных сигналов при наземной обработке и анализе информации определяются моменты времени появления зарегистрированного на борту КА события.
Известен способ, включающий генерацию на борту временных меток и передачу их с измеряемыми параметрами бортовых систем в сформированном телеметрическом кадре на наземный приемный пункт (Мановцев А.П. Основы теории радиотелеметрии. М: Энергия, 1973). Данный способ используется для большинства КА, имеющих устройства записи информации.
В этом случае обеспечивается временная привязка измерений, выполняемых при нахождении КА в любых точках орбиты.
Часть оборудования на КА имеет собственные устройства генерации времени. Например, на орбитальных станциях используется фотоаппаратура, которая имеет собственные устройства генерации времени («встроенные часы»). Такая фотоаппаратура использовалась еще на станциях «Салют» (Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях». М.: Машиностроение, 1984). Способ определения временной привязки производимых с КА снимков земной поверхности, используемый в этом случае и взятый авторами за прототип, включал генерацию на борту значения времени и передачу его с выполняемыми снимками в массиве телеметрических данных на наземный приемный пункт.
Однако, как показывает опыт, практически всегда имеет место погрешность в формировании генератором эталонного времени. Это приводит к своеобразному «уходу» генерируемых временных меток и появлению временной ошибки Δt, которая, в некоторых случаях, может достигать 2-3 мин. Появлению погрешности временной привязки способствует изменение температуры устройства генерации времени.
Ошибка временной привязки снимков земной поверхности с КА приводит к трудности опознавания полученной информации. В случае отсутствия на снимке объектов, которые могут служить ориентирами при дешифрировании, привязать по времени и обработать такой снимок часто не представляется возможным.
Особенно актуальной задача определения точной временной привязки снимков земной поверхности является для российского сегмента Международной космической станции (МКС). На МКС космонавты используют для съемки различную фотоаппаратуру, в том числе и ручную. Базовыми данными при обработке снимков является момент времени съемки, автоматически фиксируемый фотоаппаратом. К сожалению, этот параметр не всегда оказывается точным, поскольку зависит от равномерности хода встроенных часов фотоаппарата и требует постоянной подстройки экипажем. На такой контроль иногда не хватает времени, особенно в случае необходимости быстро снять новый обнаруженный объект, вне программы плановых съемок, т.е. не имея достаточно времени на подготовку.
Но если хотя бы по одному из снимков выполненной серии съемок с неточным временем удается рассчитать действительное положение МКС на орбите для данного снимка, то тогда становится возможным восстановить и точное время съемок, так как момент времени для известного положения МКС сравнительно легко вычисляется.
Затем полученную поправку времени можно учесть и в остальных снимках данной серии и даже во всех последующих снимках до корректировки хода часов, поскольку скорость «ухода» встроенных часов фотоаппарата примерно постоянна и сильнее всего зависит от температуры фотоаппарата.
В качестве способа-прототипа выбран способ определения временной привязки производимых с КА снимков земной поверхности (Патент RU (11) 2654883(13) С2; МПК B64G 1/32 (2006.01); Заявка: 2016135209, 30.08.2016; Опубликовано: 23.05.2018 Бюл. №15), включающий генерацию на борту КА значения времени и передачу его с производимыми снимками в массиве телеметрических данных на наземный приемный пункт, согласно которому поддерживают на борту КА постоянную температуру для стабильной работы аппаратуры генерации значений времени в процессе съемки, выполняют ортотрансформирование выбранного снимка, определяют по ортотрансформированному снимку положение в пространстве точки, из которой выполнялась съемка, измеряют параметры орбиты КА и определяют по ним момент времени нахождения КА на минимальном расстоянии от точки, из которой производился выбранный снимок, определяют погрешность временной привязки выбранного снимка Δ как разность между определенным моментом времени и генерируемым на борту значением времени tr и временную привязку снимков земной поверхности t определяют по формуле t=tr+Δ.
Способ - прототип позволяет определять временную привязку снимков земной поверхности с КА с учетом наличия изменяющихся во времени погрешностей в формировании бортовых временных меток.
К недостаткам способа - прототипа относится, в частности, то, что он при выполнении ортотрансформирования выбранного снимка и определении по ортотрансформированному снимку положения в пространстве точки, из которой выполнялась съемка (точки съемки), не предусматривает учета влияния точности/погрешности задания координат точек ортофотоплана и точности/погрешности задания параметров съемочной аппаратуры на точность определения точки съемки. Действительно, в зависимости от упомянутых точностей/погрешностей задания координат точек ортофотоплана и параметров съемочной аппаратуры по ортотрансформированному снимку может быть определена более чем одна точка, удовлетворяющая формулируемым для определения точки съемки уравнениям, что, следовательно, приведет к возможному ошибочному определению точки съемки.
Задачей, на решение которой направлено настоящее изобретение, является повышение точности привязки выполненных с КА снимков подстилающей поверхности к точкам выполнения съемки.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в точном определении точек пространства, из которых производилась съемка с КА подстилающей поверхности.
Технический результат достигается тем, что в способе привязки выполненных с КА снимков земной поверхности, включающем измерение параметров орбиты, ортотрансформирование снимка и определение по нему точки, из которой выполнялась съемка, дополнительно в течение заданного интервала времени после выполнения снимка выполняют дополнительную съемку подстилающей поверхности при другом значении угла между направлением нормали к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости космического аппарата, по ортотрансформированным первичному и дополнительному снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, по измеренным параметрам орбиты определяют положение плоскости орбиты космического аппарата на момент времени из упомянутого интервала времени выполнения съемки, определяют комбинацию точек, в которую входят по одной точке из определенных для первичного и дополнительного снимков упомянутых наборов точек и проходящая через них линия составляет минимальный угол с плоскостью орбиты космического аппарата в ее определенном расчетном положении, и привязку выполненных с космического аппарата снимков к точкам выполнения съемки производят по точкам данной комбинации, которые принимают за точки, из которых производилась съемка. Изобретение поясняется фиг. 1 и 2.
На фиг. 1 представлена схема выполнения снимка фотографируемой подстилающей поверхности, поясняющая получение точек в пространстве, координаты которых в связанной с планетой системе координат с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, задаваемые определяемыми значениями географических координат и соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
На фиг. 2 представлена схема, поясняющая определение точек, из которых производилась съемка.
На фиг. 1 обозначено:
Р - подстилающая поверхность;
В - точка центра снимка;
АВ, ВС - расстояния от точки В до краев снимка;
α - угол полураствора поля зрения съемочной аппаратуры;
K1, K2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированному снимку.
На фиг. 2 обозначено:
М - линия орбиты КА;
Р - подстилающая поверхность;
Т - линия трассы КА на подстилающей поверхности;
V - вектор скорости КА;
Q - направление в надир;
N - вектор нормали к плоскости орбиты КА;
W - направление видимого с КА бега местности подстилающей поверхности;
γ - угол между направлением нормали к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости КА;
Fi, i=l,2 - центральные точки выполненных с КА снимков;
Kij, i=l,2; j=l,2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
Hi, i=l,2 - наборы точек в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
D - комбинация точек, в которую входят по одной точке из каждого упомянутого набора точек и проходящая через них линия составляет минимальный угол с плоскостью орбиты КА.
Опишем действия предлагаемого способа.
Рассматриваем задачу привязки снимков подстилающей поверхности, полученных в результате выполнения съемки с орбитального КА, обращающегося вокруг Земли или другой планеты (Луна, Марс) с измеренными значениями пространственных координат точек поверхности.
Считаем, что съемка подстилающей поверхности выполняется установленной на КА съемочной аппаратурой, для которой заданы такие характеристики как угол поля зрения, фокусное расстояние, размер матрицы прибора с зарядовой связью и т.д.
Считаем, что ось визирования съемочной аппаратуры при выполнении съемки может отклонятся от направления в надир (от направления от КА в подспутниковую точку), при этом, учитывая, что точка пересечения оси визирования съемочной аппаратуры с подстилающей поверхностью перемещается по поверхности планеты в направлении видимого с КА бега местности, наведение оси визирования съемочной аппаратуры на снимаемые объекты, задаваемые на поверхности планеты, выполняется поворотом оси визирования съемочной аппаратуры в направлении, перпендикулярном видимому с КА бегу местности (в плоскости, перпендикулярной вектору скорости КА).
В предлагаемом способе исходными данными для решения задачи служат опознанные и координатно привязанные (ортотрансформированные) цифровые снимки - снимки, для которых рассчитаны географические координаты каждого пикселя изображения. При решении задачи на снимках анализируются «особые» пиксели - центральный пиксель снимка и пиксели, лежащие на окружности, вписанной в прямоугольник снимка. Поскольку координаты каждого пикселя после ортотрансформирования становятся известны, рассчитывается множество значений расстояний от центрального пикселя снимка до всех лежащих на окружности пикселей. Затем выбираются два противолежащих от центральной точки пикселя, расстояние между которыми является наибольшим.
Так как воображаемая окружность, вписанная в снимок, преобразуется на поверхности планеты в фигуру (пересечение сферы с конусом), близкую к эллипсу, то искомая точка съемки, лежащая в плоскости главного вертикала снимка, оказывается лежащей в плоскости, проходящей через центр снимка В, две найденные точки А и С «большой полуоси» этого «эллипса» (точки А и С определяются как точки, соответствующие максимальному расстоянию между ними) и центр планеты (обозначим его как О).
Таким образом, пространственная задача сводится к плоской задаче, показанной на фиг. 1. При решении математической задачи известны расстояния АВ и ВС; угол полураствора снимка (определяется как угол α полураствора поля зрения съемочной аппаратуры с учетом фокусного расстояния и размера матрицы прибора с зарядовой связью); угол между векторами АВ и ВС, учитывающий сферичность поверхности планеты. По результатам анализа всех известных углов и расстояний вычисляется расстояние от искомой точки съемки (обозначим ее как S) до центра снимка В.
При переходе от решения плоской задачи к решению пространственной задачи учитывается, что вектора ОВ и BS лежат в одной плоскости с векторами АВ и ВС и угол между ними известен. Используем систему координат OXYZ с центром в точке О, ось Y проходит через ОВ, ось X лежит в плоскости ОАВ и ось Z дополняет систему координат до правой. В системе OXYZ вектор BS имеет нулевую компоненту по координате Z, а компоненты по координатам X и У определяются как проекции BS на ОВ и направление, перпендикулярное ОВ.
Географические координаты точки В в результате ортотрансформирования снимка известны. Поэтому координаты радиус-вектора ОВ могут быть вычислены в некоторой базовой системе координат с началом в центре планеты. Таким образом, можно составить матрицу перехода от базовой системы координат к выбранной выше системе OXYZ и получить радиус-вектор OS (и, таким образом, искомое пространственное положение точки S) в базовой системе координат, связанной с положением центра масс планеты. В общем случае будет построено два положения точки S симметрично относительно линии ОВ. Определение истинного варианта положения точки съемки S осуществляют по предложенной в настоящем способе процедуре. Для этого осуществляют следующие действия, иллюстрация которых приведена на фиг. 2.
В течение заданного интервала времени (в течение интервала времени менее чем задаваемой продолжительности Δt) после выполнения первичного снимка выполняют дополнительную съемку подстилающей поверхности при другом значении угла у между направлением нормали к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости космического аппарата.
Определение текущего направления вектора скорости КА, необходимое для обеспечения контроля различия значений угла γ на моменты выполнения первичного и дополнительного снимков, может быть осуществлено, например, по направлению видимого с КА бега местности подстилающей поверхности. В результате выполнения съемки получают снимки с центральными точками Fi, i=l,2.
По ортотрансформированным первичному (i=l) и дополнительному (i=2) снимкам определяют географические координаты точек поверхности планеты, соответствующих центральному пикселю снимка и пикселям, лежащим на вписанной в снимок окружности, и определяют наборы Hi, i=l,2, точек в пространстве Kij, j=l,2, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины кругового конуса с углом раствора, равным углу поля зрения съемочной аппаратуры, лучи конуса проходят через определенные точки поверхности планеты, соответствующие пикселям, лежащим на вписанной в снимок окружности, а ось конуса проходит через определенную точку поверхности планеты, соответствующую центральному пикселю снимка.
По измеренным параметрам орбиты определяют положение плоскости орбиты КА на момент времени из упомянутого интервала времени выполнения съемки. Положение плоскости орбиты КА определяют, например, по расчетным направлениям радиус-вектора и вектора скорости КА.
Далее определяют комбинацию D точек, в которую входят по одной точке из определенных для первичного и дополнительного снимков упомянутых наборов точек Hi, i=l,2 и проходящая через них линия составляет минимальный угол с плоскостью орбиты КА в ее определенном расчетном положении:

где βnk - угол между линией, проходящей через точки, K1n, K2k, плоскостью орбиты, находящейся в ее определенном расчетном положении.
Привязку выполненных с КА снимков к точкам выполнения съемки производят по точкам данной комбинации D, которые принимают за точки, из которых производилась съемка.
В предлагаемом способе условие выполнения съемки подстилающей поверхности при различных значениях указанного угла у гарантирует единственность искомой комбинации точек D, определяемой соотношением (1) и удовлетворяющей двум требованиям:
- содержит по одной точке из каждого набора точек Hi, i=l,2;
- линия, проходящая через точки данной комбинации точек, составляет минимальный угол с плоскостью орбиты КА, находящейся в ее определенном расчетном положении.
При этом наиболее явно указанная многозначность определения положения точки съемки S проявляется при отличных от 90° значениях указанного угла γ.
В предлагаемом способе условие выполнения съемки подстилающей поверхности в течение интервала времени менее чем задаваемой продолжительности Δt обеспечивает необходимый уровень близости искомых истинных точек съемки, который гарантирует, что линия, проходящая через искомые истинные точки, из которых производилась съемка (точки  K2m в соотношении (1)), составляет с плоскостью орбиты КА, находящейся в ее определенном расчетном положении, угол, величина которого заведомо меньше величины угла между данной плоскостью и любой другой линией, проходящей через две точки, одна из которых водит в один, а другая - в другой из наборов точек Hi, i=l,2. Величина Δt может быть рассчитана в зависимости от прогнозируемой скорости полета КА и прогнозируемого отличия значений углов γ, при которых будет выполняться съемка подстилающей поверхности.
K2m в соотношении (1)), составляет с плоскостью орбиты КА, находящейся в ее определенном расчетном положении, угол, величина которого заведомо меньше величины угла между данной плоскостью и любой другой линией, проходящей через две точки, одна из которых водит в один, а другая - в другой из наборов точек Hi, i=l,2. Величина Δt может быть рассчитана в зависимости от прогнозируемой скорости полета КА и прогнозируемого отличия значений углов γ, при которых будет выполняться съемка подстилающей поверхности.
К упомянутым точностям/погрешностям задания параметров съемочной аппаратуры можно отнести, например, неточность изготовления и установки объектива, несовпадение истинного фокусного расстояния с реальным (например, при номинале 800 мм, истинное значение фокусного расстояния может быть на несколько мм больше или меньше номинала), неточность установки отсчета времени в аппаратуре (например, при синхронизации времени вручную) и т.п.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение обеспечивает точное определение истинных точек пространства, из которых производилась съемка с КА подстилающей поверхности планеты, вокруг которой обращается КА. В качестве планеты обращения КА может рассматриваться как Земля, так и Луна и Марс.
Достижение данного технического результата обеспечивает возможность реализации гарантированной высокоточной привязки выполненных с КА снимков подстилающей поверхности к точкам выполнения съемки. Особенно важность указанного положительного эффекта проявляется при применении предлагаемого технического решения в случаях, когда возможная некорректная привязка регистрируемых на снимках данных может явиться причиной их неправильной интерпретации и/или привести к ущербу в результате действий, принятых из-за указанной неверной интерпретации данных.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Способ привязки выполненных с космического аппарата снимков земной поверхности, включающий измерение параметров орбиты, ортотрансформирование снимка и определение по нему точки, из которой выполнялась съемка, отличающийся тем, что в течение заданного интервала времени после выполнения снимка выполняют дополнительную съемку подстилающей поверхности при другом значении угла между направлением нормали к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости космического аппарата, по ортотрансформированным первичному и дополнительному снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, по измеренным параметрам орбиты определяют положение плоскости орбиты космического аппарата на момент времени из упомянутого интервала времени выполнения съемки, определяют комбинацию точек, в которую входят по одной точке из определенных для первичного и дополнительного снимков упомянутых наборов точек, причём проходящая через эти точки линия составляет минимальный угол с плоскостью орбиты космического аппарата в ее определенном расчетном положении, а привязку выполненных с космического аппарата снимков к точкам выполнения съемки производят по точкам данной комбинации, которые принимают за точки, из которых производилась съемка.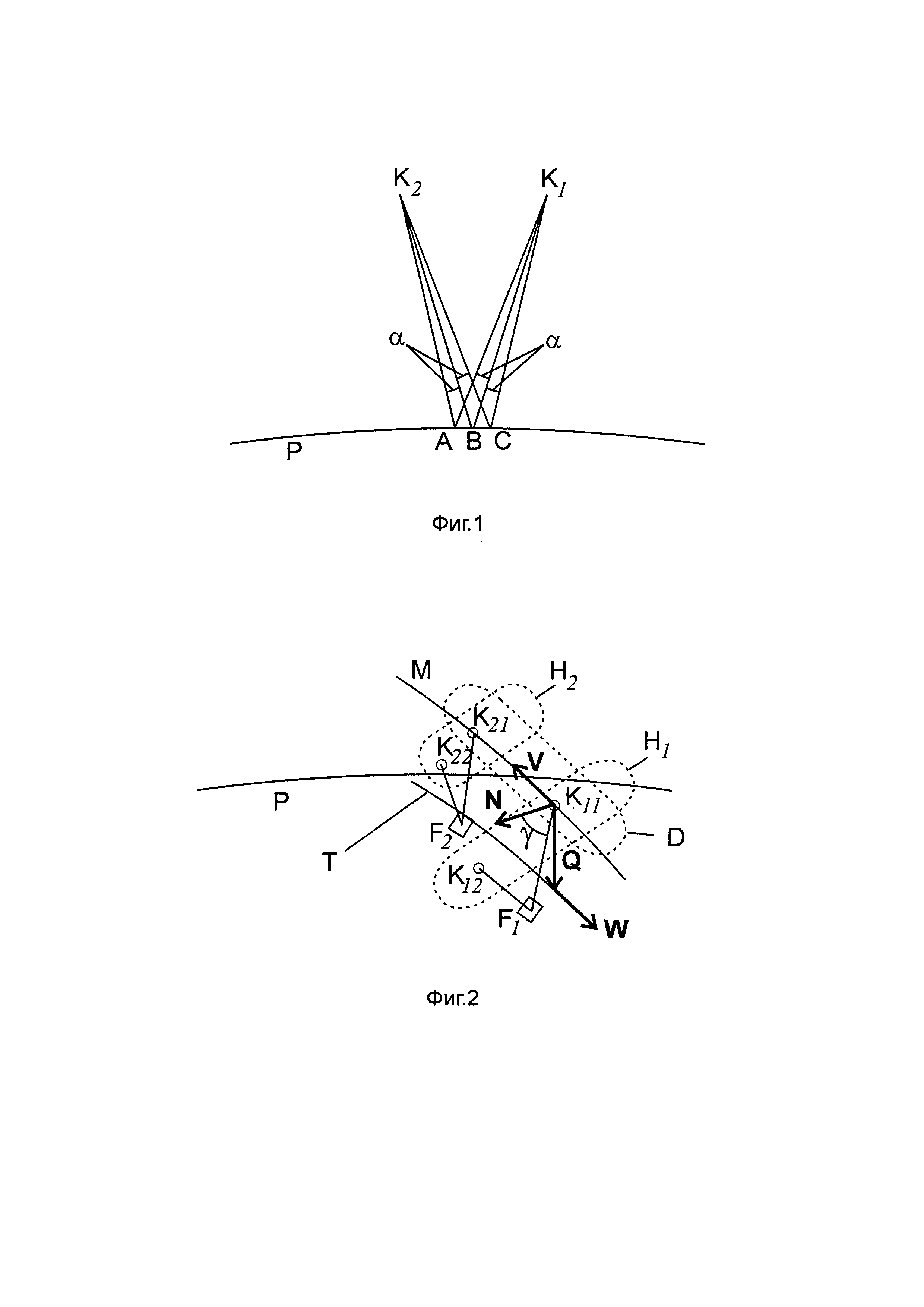
Способ управления космическим аппаратом с имеющими одну степень свободы солнечными батареями
Способ контроля телеметрической информации
Устройство деления потока жидкости
Способ определения деформации корпуса объекта преимущественно космического аппарата
Устройство для ориентирования перемещаемой на борту пилотируемого корабля аппаратуры наблюдения
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ определения деформации корпуса объекта преимущественно космического аппарата
Электромагнитный фрикционный многодисковый тормоз
Планетарный редуктор
Способ определения координат фотографируемых с космического аппарата земных объектов
Способ определения тензора инерции космического аппарата
Способ тарировки датчика микроускорений в космическом полете
Способ управления ориентацией космического аппарата при проведении экспериментов с научной аппаратурой по изучению конвекции
Способ определения высоты облачности
Способ выведения спутника на заданную околоземную орбиту
Способ определения высоты облачности (варианты)
Наглядное пособие
Способ определения тензора инерции космического аппарата в полете
Способ определения тензора инерции космического аппарата

